國立交通大學
工學院專班營建技術與管理組
碩士論文
共軛球與反射標在不同距離下對三維雷射掃瞄儀精度影響
之研究-以 Mensi GS200 為例
A Study on effects 3D Laser Scanner Precision in Different
Distance Between Sphere and Target -A Case of Mensi GS200
研究生:陳朝瑞
指導教授:陳春盛 教授
共軛球與反射標在不同距離下對三維雷射掃瞄儀精度影響
之研究-以 Mensi GS200 為例
A Study on effects 3D Laser Scanner Precision in Different
Distance Between Sphere and Target -A Case of Mensi GS200
研 究 生: 陳朝瑞 Student: Chao-Rui, Chen
指導教授: 陳春盛
Advisor: Prof.Chun-Sung, Chen
國 立 交 通 大 學
工學院專班營建技術與管理組
碩 士 論 文
A Thesis
Master Degree Program of Construction Technology and Management College of Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master
in
Program of Construction Technology and Management July 2007
Hsinchu, Taiwan, Republic of China 中華民國 九十六 年 七 月
i 共軛球與反射標在不同距離下對三維雷射掃瞄儀精度影響之研究 -以Mensi GS200 為例 學生:陳朝瑞 指導教授:陳春盛 教授 摘要 目前國內對於量測的設備,多使用傳統測量儀器,通常傳統測量 的方式,只能針對幾個取樣點來評估結構體的幾何變化;伴隨著科技 的進步,三維雷射掃瞄技術近年來已有長足的進步,能夠準確且快速 的記錄極為複雜的空間資料,已經突破傳統測量技術的瓶頸。 對本研究所選用的三維雷射掃瞄儀機型而言,共軛球與反射標是 套合不同測站間連接點雲的重要工具,其精度的表現將大大的影響後 續點雲套合精度成果;本研究分別將共軛球與反射標放置於不同距離 下,進行重複掃描,在相同的條件下,對共軛球與反射標分析其精度 差異;在實際狀況下,三維雷射掃瞄儀往往因作業環境的影響,如通 視等問題,共軛點與點雲轉置的位置就必須視狀況而調整其位置,因 而產生長短邊的問題,故本研究將其反射標與共軛球配置在與測站之 長短距離的情況下,分別進行座標套合交叉比對,來探討三維雷射掃 瞄儀對此狀況的精度表現。
ii
A Study on effects 3D Laster Scanner Precision in Different Distance Between Sphere and Target– A Case of Mensi GS200
Student: Chao-Rui, Chen Advisors: Prof. Chun-Sung, Chen
Abstract
The most of normal measure equipments still be used in Taiwan until now, and the normal measure method only can estimate the geometry variation of structure by few sampling points. Because of improvement through technology, 3D Laser Scanner could precise and speedy recently to record the complex space data, and it was beak through the neck of a bottle on traditional measure method.
According to the type of 3D Laser Scanner for this report, Sphere and Target are very important tools to combine with different points and connect with Point Cloud. Their precision can enormously influence on the compound result of Point Cloud.
On this report, the Sphere and Target will placed on different distance individually, to carry out the repeating scan in the same situation to analyze their difference of precise.
In actually situation, 3D Laser Scanner usually depend on the work environment such as observable problem etc, so the Sphere and Point Cloud should be revised the position based on current situation and lead to the“long and short length"problem. Thus the report shows Sphere and Target lay out in“long and short length" situation to proceed the cross-validation of coordinate registration dividedly. In further to discuss the precise of 3D Laser Scanner.
iii 誌 謝 本論文得以順利完成,承蒙恩師 陳教授春盛悉心教導,在研究 期間對論文題目、研究方向、內容架構、給予學生多加啟發及匡正, 浩瀚師恩,永記在心,在此表達最高敬意;口試期間,承蒙林教授國 安與吳教授永照,對學生提出寶貴意見與建議,使本研究內容更加充 實與完整,學生由衷感謝。 求學期間,感謝專班助理雅聿姐幫我們處理本學程的一切事務, 讓我們能更專心的學習;感謝同窗好友國勳、文環、致予、啟榮及國 棟、景程、亭昌的相互扶持、ㄧ路陪伴;感謝學弟 Jaco、熱狗、及 建翔在外業的支持與協助;特別感謝博士班學長建廷兄在本論文的研 究過程中給予最大的支持與鼓勵。 最後,謹以此論文獻給我最敬愛的父母、妻子心瑩及我最可愛的 兩個女兒昱安、昱臻,感謝您們的關心與支持,使我無後顧之憂,得 以順利完成學業。 陳朝瑞 謹誌於交通大學 2007.07.27
iv
目 錄
摘要... i Abstract ... ii 誌謝... iii 目錄... iv 圖目錄... vi 表目錄...x 第一章 前言 ...1 1-1 研究動機及目的 ...1 1-2 研究方法 ...3 1-3 研究流程 ...4 1-4 論文架構 ...5 第二章 理論基礎 ...7 2-1 掃瞄原理 ...7 2-2 定位機制 ...10 2-3 座標轉換及精度分析模式 ...13 2-3-2 精度分析模式 ...15 第三章 共軛球與反射標之精度差異 ...17 3-1 實驗場地 ...17 3-2 實驗設計 ...18v 3-3 實驗成果 ...23 3-3-1 共軛球與反射標之精密度差異分析:...23 3-3-2 共軛球與反射標精確度差異分析...28 3-3-3 共軛球與反射標座標差值差異分析...34 第四章 長短距離對共軛球與反射標點雲套合之精度差異 ...36 4-1 實驗設計 ...36 4-2 實驗成果 ...38 4-2-1 儀器未整平之全區域座標轉換之精度分析...39 4-2-2 第一組試驗 ...46 4-2-3 第二組、Ⅱ-246 固定,Ⅰ-13 轉置 ...50 4-2-4 第二組、Ⅰ-135 固定,Ⅱ-46 轉置 ...57 4-2-5 第三組、Ⅱ-456 固定,Ⅰ-123 轉置 ...64 4-2-6 第三組、Ⅰ-123 固定,Ⅱ-456 轉置 ...71 第五章 結論與建議 ...79 參考文獻...82 作者簡歷...85
vi
圖目錄
圖1-1、反射標 圖 1-2、共軛球...2 圖1-3 、研究流程圖 ...5 圖2-1、時間差量測法示意圖(修改自Boehler,2001) ...8 圖2-2、三角法:單相機法(修改自Boehler,2001) ...9 圖2-3、三角法:雙相機法(修改自Boehler,2001) ...10 圖2-4、三維雷射掃瞄定位示意圖(賴志凱,2004)...11 圖2-5、掃描儀坐標系與物空間坐標系之關係圖(修改自Lichti,2002) ...14 圖3-1、高鐵青埔站前之綠地 ...18 圖3-2、反射標垂直定點工具 ...20 圖3-3、全測站經緯儀 圖 3-4、三維雷射掃瞄儀 ...20 圖3-6、反射標STD三軸向誤差分佈圖 ...23 圖3-7、共軛球STD三軸向誤差分佈圖 ...24 圖3-8、共軛球與反射標STD X軸向誤差分佈圖 ...25 圖3-9、共軛球與反射標STD Y軸向誤差分佈圖...26 圖3-10、共軛球與反射標STD Z軸向誤差分佈圖...27 圖3-11、共軛球與反射標STD三軸總量誤差分佈圖 ...28 圖3-12、反射標RMS三軸向誤差分佈圖 ...29 圖3-13、共軛球RMS三軸向誤差分佈圖 ...30vii 圖3-14、共軛球與反射標RMS-X軸向誤差分佈圖 ...31 圖3-15、共軛球與反射標RMS-Y軸向誤差分佈圖 ...32 圖3-16、共軛球與反射標RMS-Z軸向誤差分佈圖...33 圖3-17、共軛球與反射標RMS-單位權誤差分佈圖 ...34 圖3-18、共軛球與反射標座標差值誤差分佈圖...35 圖4-1、三為雷射掃瞄儀配置平面圖 ...37 圖4-2、全區套合Target之RMS 三軸向誤差分佈圖 ...40 圖4-3、全區套合Sphere之RMS 三軸向誤差分佈圖 ...41 圖4-4、全區套合Sphere與Target之RMS-X軸向誤差分佈圖...42 圖4-5、全區套合Sphere與Target之RMS-Y軸向誤差分佈圖...43 圖4-6、全區套合Sphere與Target之RMS-Z軸向誤差分佈圖 ...44 圖4-7、全區套合Sphere與Target之RMS-單位權誤差分佈圖...45 圖4-8、全區套合Sphere與Target之座標差值誤差分佈圖...46 圖4-9、轉置Ⅰ123 Target之RMS 三軸向誤差分佈圖 ...47 圖4-10、轉置Ⅰ123 Sphere之RMS 三軸向誤差分佈圖 ...48 圖4-11、轉置Ⅱ456 Target之RMS 三軸向誤差分佈圖 ...49 圖4-12、轉置Ⅱ456 Sphere之RMS 三軸向誤差分佈圖 ...50 圖4-13、轉置Ⅰ13 Target之RMS 三軸向誤差分佈圖 ...51 圖4-14、轉置Ⅰ13 Sphere之RMS 三軸向誤差分佈圖 ...52
viii 圖4-15、轉置Ⅰ13 Sphere與Target之RMS-X軸向誤差分佈圖...53 圖4-16、轉置Ⅰ13 Sphere與Target之RMS-Y軸向誤差分佈圖...54 圖4-17、轉置Ⅰ13 Sphere與Target之RMS-Z軸向誤差分佈圖 ...55 圖4-18、轉置Ⅰ13 Sphere與Target之RMS單位權誤差分佈圖 ...56 圖4-19、轉置Ⅰ13 Sphere與Target之座標差值誤差分佈圖...57 圖4-20、轉置Ⅱ46 Target之RMS 三軸向誤差分佈圖 ...58 圖4-21、轉置Ⅱ46 Sphere之RMS 三軸向誤差分佈圖 ...59 圖4-22、轉置Ⅱ46 Sphere與Target之RMS-X軸向誤差分佈圖...60 圖4-23、轉置Ⅱ46 Sphere與Target之RMS-Y軸向誤差分佈圖...61 圖4-24、轉置Ⅱ46 Sphere與Target之RMS-Z軸向誤差分佈圖 ...62 圖4-25、轉置Ⅱ46 Sphere與Target之RMS單位權誤差分佈圖 ...63 圖4-26、轉置Ⅱ46 Sphere與Target之座標差值誤差分佈圖...64 圖4-27、整平轉置Ⅰ123 Target之RMS 三軸向誤差分佈圖 ...65 圖4-28、整平轉置Ⅰ123 Sphere之RMS 三軸向誤差分佈圖 ...66 圖4-29、整平轉置Ⅰ123 Sphere與Target之RMS-X軸向誤差分佈圖.67 圖4-30、整平轉置Ⅰ123 Sphere與Target之RMS-Y軸向誤差分佈圖.68 圖4-31、整平轉置Ⅰ123 Sphere與Target之RMS-Z軸向誤差分佈圖 .69 圖4-32、整平轉置Ⅰ123 Sphere與Target之RMS單位權誤差分佈圖 .70 圖4-33、整平轉置Ⅰ123 Sphere與Target之座標差值誤差分佈圖...71
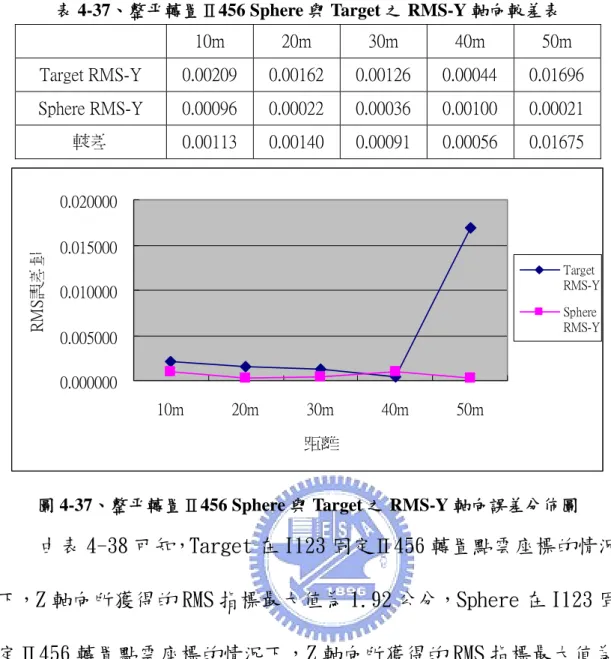
ix 圖4-34、整平轉置Ⅱ456 Target之RMS 三軸向誤差分佈圖 ...72 圖4-35、整平轉置Ⅱ456 Sphere之RMS 三軸向誤差分佈圖 ...73 圖4-36、整平轉置Ⅱ456 Sphere與Target之RMS-X軸向誤差分佈圖.74 圖4-37、整平轉置Ⅱ456 Sphere與Target之RMS-Y軸向誤差分佈圖.75 圖4-38、整平轉置Ⅱ456 Sphere與Target之RMS-Z軸向誤差分佈圖 .76 圖4-39、整平轉置Ⅱ456 Sphere與Target之RMS單位權誤差分佈圖 .77 圖4-40、整平轉置Ⅱ456 Sphere與Target之座標差值誤差分佈圖...78
x
表目錄
表1-1 共軛球與反射標之適用差異表 ...2 表2-1、雷射掃描儀規格比較表(修改自POB,2003) ...12 表3-1、Target與Sphere詳細規格表...19 表3-2、反射標STD 三軸向比較表(單位:m) ...23 表3-3、共軛球STD 三軸向比較表(單位:m) ...24 表3-4、共軛球與反射標STD X軸向較差表(單位:m) ...25 表3-5、共軛球與反射標STD Y軸向誤差較差表(單位:m) ...26 表3-6、共軛球與反射標STD Z軸向較差表(單位:m)...27 表3-7、共軛球與反射標STD三軸總量較差表(單位:m) ...28 表3-8、反射標RMS三軸向比較表(單位:m) ...29 表3-9、共軛球RMS三軸向比較表(單位:m) ...29 表3-10、共軛球與反射標RMS X軸向較差表(單位:m) ...30 表3-11、共軛球與反射標RMS Y軸向較差表(單位:m)...31 表3-12、共軛球與反射標RMS-Z軸向較差表(單位:m) ...32 表3-13、共軛球與反射標RMS-單位權較差表(單位:m)...33 表3-14、共軛球與反射標座標差值較差表(單位:m)...34 表4-1、試驗分組表 ...38 表4-2、全區套合 Target之RMS 三軸向比較表 ...39xi 表4-3、全區套合 Sphere之RMS 三軸向比較表 ...40 表4-4、全區套合 Sphere與Target之RMS-X軸向比較表...41 表4-5、全區套合 Sphere與Target之RMS-Y軸向比較表...42 表4-6、全區套合 Sphere與Target之RMS-Z軸向比較表 ...43 表4-7、全區套合 Sphere與Target之RMS-單位權比較表...44 表4-8、全區套合 Sphere與Target之座標差值較差表...45 表4-9、轉置Ⅰ123 Target之RMS 三軸向比較表 ...47 表4-10、轉置Ⅰ123 Sphere之RMS 三軸向比較表 ...47 表4-11、轉置Ⅱ456 Target之RMS 三軸向比較表 ...48 表4-12、轉置Ⅱ456 Sphere 之RMS 三軸向比較表 ...49 表4-13、轉置Ⅰ13 Target之RMS 三軸向比較表 ...51 表4-14、轉置Ⅰ13 Sphere之RMS 三軸向比較表 ...52 表4-15、轉置Ⅰ13 Sphere與Target之RMS-X軸向較差表...53 表4-16、轉置Ⅰ13 Sphere與Target之RMS-Y軸向較差表...54 表4-17、轉置Ⅰ13 Sphere與Target之RMS-Z軸向較差表 ...55 表4-18、轉置Ⅰ13 Sphere與Target之RMS單位權較差表 ...56 表4-19、轉置Ⅰ13 Sphere與Target之座標差值較差表...57 表4-20、轉置Ⅱ46 Target之RMS 三軸向比較表 ...58 表4-21、轉置Ⅱ46 Sphere之RMS 三軸向較差表 ...59
xii 表4-22、轉置Ⅱ46 Sphere與Target之RMS-X軸向較差表...60 表4-23、轉置Ⅱ46 Sphere與Target之RMS-Y軸向較差表...61 表4-24、轉置Ⅱ46 Sphere與Target之RMS-Z軸向較差表 ...62 表4-25、轉置Ⅱ46 Sphere與Target之RMS單位權較差表 ...63 表4-26、轉置Ⅱ46 Sphere與Target之座標差值較差表...64 表4-27、整平轉置Ⅰ123 Target之RMS 三軸向比較表 ...65 表4-28、整平轉置Ⅰ123 Sphere之RMS 三軸向比較表 ...66 表4-29、整平轉置Ⅰ123 Sphere與Target之RMS-X軸向較差表...67 表4-30、整平轉置Ⅰ123 Sphere與Target之RMS-Y軸向較差表...68 表4-31、整平轉置Ⅰ123 Sphere與Target之RMS-Z軸向較差表 ...69 表4-32、整平轉置Ⅰ123 Sphere與Target之RMS單位權較差表 ...70 表4-33、整平轉置Ⅰ123 Sphere與Target之座標差值較差表...71 表4-34、整平轉置Ⅱ456 Target之RMS 三軸向比較表 ...72 表4-35、整平轉置Ⅱ456 Sphere之RMS 三軸向較差表 ...73 表4-36、整平轉置Ⅱ456 Sphere與Target之RMS-X軸向較差表...74 表4-37、整平轉置Ⅱ456 Sphere與Target之RMS-Y軸向較差表...75 表4-38、整平轉置Ⅱ456 Sphere與Target之RMS-Z軸向較差表 ...76 表4-39、整平轉置Ⅱ456 Sphere與Target之RMS單位權較差表 ...77 表4-40、整平轉置Ⅱ456 Sphere與Target之座標差值較差表...78
1
第一章 前言
1-1 研究動機及目的
近年來許多測量儀器設備,伴隨著科技的進步相繼而生,使得測 量作業的速度與精度都得以大幅提昇。目前國內對於量測的設備,多使用傳統測量儀器(如GPS、及全 測站經緯儀等),通常傳統測量的方式,只能針對幾個取樣點來評估 結構體的幾何變化,這是在以往測量儀器設備的眾多限制條件下,非 常無可奈何的方式。 三維雷射掃瞄技術近年來已有長足的進步,已經突破傳統測量技 術的瓶頸,引起台灣各界對其高度的重視,由於三維雷射掃瞄儀能夠 準確且快速的記錄極為複雜的空間資料,預期對於現階段量測作業將 產生革命性的影響。 以目前對於三維雷射掃瞄儀精度相關文獻的研究,均為固定距離 及相同材質做為共軛基準點與特徵點的基準,但是在實際應用上,三 維雷射掃瞄儀往往因作業環境的影響,如通視等問題,共軛基準點的 擺設位置就必須視狀況而調整其位置。且共軛基準點與特徵點所擺放 的設備規格也常因為在不同考量下而有所不同(表 1-1),有鑑於此, 故本研究的主要目的有下列二點:
2 1、將反射標(如圖 1-1)與共軛球(如圖 1-2)在不同距離的情 況下,分析二者精度之表現。 2、將反射標與共軛球配置在與測站之長短距離的情況下,分別 進行座標套合交叉比對,來探討三維雷射掃瞄儀對此狀況的精度 表現。 表 1-1 共軛球與反射標之適用差異表 圖 1-1、反射標 圖 1-2、共軛球 雖然目前三維雷射掃瞄儀的價格非常昂貴,相信未來在業界的普 遍使用後,將可分攤其生產成本,成為測量作業中最適當、最普及且 最符合測量效益的測量量測工具。 成本 放置區 掃瞄角度 共軛球 高 平面 360∘ 反射標 低 立面 ±70∘
3
1-2 研究方法
本研究所選用的三維雷射掃瞄儀為 Trimble 的子公司 Mensi 所生 產的 GS200 型,此設備除了掃瞄儀本體外,還包括了原場所率定的共 軛球(Sphere)及反射標(Targer)之配件。 在選擇掃描共軛基準點與特徵點的配件方面,本研究選用原場所 率定的共軛球及反射標,除了考量共軛球與反射標的適用性不同外, 也是考量了使用者的普遍選擇,使用者可依據現地環境的狀況及不同 的需求,而自由選擇適合的掃描共軛基準點與特徵點的配件。 本論文除了測試共軛球與反射標的精度差異,另外還需模擬三維 雷射掃瞄儀在掃描作業中,所發生的長短邊問題。故本研究首先測試 共軛球與反射標的精度差異。利用固定的點位,使三維雷射掃瞄儀之 測站在不同距離下,先後放置共軛球與反射標在相同的實驗點位上, 進行重複觀測。另一部分則針對長短邊問題,設計分隔較遠的兩區固 定點位,由儀器對在不同距離下,對這兩區產生長短邊的觀測,並先 後放置共軛球與反射標在兩區的實驗點位上,進行重複觀測。 最後,將上述所觀測之原始點雲資料,經相關之數學模式運算 成果,分析共軛球與反射標的精度差異之後,套入已知座標,再進行 共軛球與反射標的交叉比對分析。4
1-3 研究流程
本研究之研究流程圖如圖 1-3 所示,詳細步驟說明如下: 一、 訂定研究方向及研究題目 經由現行的測量作業方式來發現目前所遭遇的問題,訂定 研究方向及研究題目。 二、 回顧相關文獻並修正研究題目 針對暫定之研究方向及研究題目,收集國內、外相關文獻 加以研讀,從文獻回顧中修正研究題目,並探討相關的研究 方法,確定出適合本論文之研究方式。 三、 確立研究題目 經由上述的過程,即可確立研究題目。 四、 設計研究方法 確立研究題目後,設計出如何得到題目所需各項數據之 方式,並研擬研究的流程及步驟。 五、 研究成果探討 經由測量外業所得到之各項數據,選定適合的數學模式 進行數值分析。 六、 結論與建議 歸納研究成果,並提出對後續研究之建議。5 本論文研究流程圖如下: 暫定研究方向及研究題目 回顧相關文獻並修正研究題目 確立研究題目 設計研究方法 研究成果探討 結論與建議 圖 1-3 、研究流程圖
1-4 論文架構
本文各章內容簡述如下: 第一章 前言:說明本文之研究動機,目的,方法與研究流程。6 第二章 理論基礎:概略介紹三維雷射掃瞄儀之基本理論及相關 數值分析模式。 第三章 共軛球與反射標之精度差異:簡述試驗場地的選擇、測 量設備的型式及共軛球與反射標之精度差異。 第四章 長短距離對共軛球與反射標點雲套合之精度差異:探討 長短距離對共軛球與反射標點雲套合之精度差異。 第五章 結論與建議:歸納前述之研究成果,並提出結論與對後 續研究之建議。
7
第二章 理論基礎
本章節主要在介紹一般雷射掃瞄儀的掃瞄原理及定位機制,根據 文獻整理出雷射掃瞄儀的規格比較表,並對於本研究所運用相關之數 學模式加以闡述。2-1 掃瞄原理
Boehler(2001)依據三維雷射掃描儀測量原理之不同,將其分 類為時間差量測(Time-of-flight,TOF)及三角法(Triangulation) 兩種,其中三角法又分為單相機法與雙相機法兩種,茲分別詳述如下 (一) 時間差量測(Time-of-flight,TOF) 由雷射掃描儀發射出脈衝雷射光到待測物體的表面,再接收經由 待測物體表面反射回來的訊號,計算該期間之時間長度,圖一為其量 測之示意圖,由光速 c、時間△t 算出掃描儀與物體之間的距離ρ。(如 圖 2-1 所示)。 t cΔ = 2 1 ρ ...(2-1) 採用此種方法的雷射掃描儀比起三角法(triangulation)可以 測量較遠的距離,但在近距離時,精度卻顯得較差。一般而言,誤差 仍隨著距離增加而增大。市面上之雷射掃描儀多採用這種系統,如: Trimble GS200(本研究所選用之機型)、Riegl LMS-Z420、Cyrax2500、8 Optech ILRIS-3D 等。 圖 2-1、時間差量測法示意圖(修改自 Boehler,2001) (二) 三角法(Triangulation) 此方法利用三角形幾何關係求得距離。先由雷射掃描儀發射雷射 光到待測物體表面,經由入射光與反射光之間的夾角,利用在基線另 一端之相機接收物體反射之訊號,且雷射光源與 CCD 之間的基線長度 經率定已知,經由三角形幾何關係推求雷射掃描儀與待測物體之間之 距離。採用此種方法的三維雷射掃描儀在近距離的精度較時間差系統 為佳,但其最大測距範圍也較短,測距精度與本身基線長度有關。而 另外一種三角法是採用兩台各自架設在基線兩端的相機,接收經待測 物體反射之訊號,計算雷射掃描儀與物體間之距離。(如圖 2-2 所示) (1) 單相機三角量測法(Triangulation principle-single camera solution): 利用雷射光撞擊於待測點上時,瞬間由另一側之相機攝影該 物體 反射稜鏡 雷射
9 光點形成三角關係,而雷射頭與相機位置為固定基線長度,藉以 計算待測點之坐標位置。 λ ρ cos L = ,其中 ρ 為距離,L 代表反射 稜鏡到鏡頭的基線長,λ為鏡頭與基線之間的夾角。 圖 2-2、三角法:單相機法(修改自 Boehler,2001) (2) 雙相機三角量測法(Triangulation principle-double camera solution): 利用雷射光撞擊於待測點上時,瞬間由兩側之相機攝影該光 點形成三角關係,而兩相機位置為固定基線長度,藉以計算待測 點之坐標位置。ρ =L1tanλ1 =L2tanλ2 L= L1 +L2,其中 ρ 為距 離,L 代表兩個鏡頭的基線長,λ1、λ2為鏡頭與基線之夾角。(如 圖 2-3 所示) 物體 基線 L 雷射 CCD 雷射軸向 相機軸向 反射稜鏡
10 圖 2-3、三角法:雙相機法(修改自 Boehler,2001) 雖然三維雷射掃瞄儀可分為時間差量測法與三角法,基本上 三維雷射掃瞄儀仍是距離測量的一種,因此,三維雷射掃瞄儀的 誤差大小也是隨著掃瞄儀與待測物體間的距離增加而增加。對於 較近物體的測量,因為其距離較短,在時間的準確度上便會影響 距離的精度,所以在近距離測量時,三角法的精度較時間差量測 法為高,反之,對於較遠物體的測量,距離增長,角度的偏差對 於距離測量影響較大,故長距離的雷射掃瞄儀多採用時間差量測 法進行。
2-2 定位機制
一般的三維雷射掃瞄儀的依掃瞄次序可分為橫掃式和縱掃 式。橫掃式是先固定垂直反射稜鏡,使掃瞄儀進行水平方向的掃 瞄,之後垂直反射稜鏡轉動一角度,再繼續水平方向掃瞄;縱掃 物體 CCD CCD 雷射 鏡頭 鏡頭11 式則剛好相反,先固定水平方向反射稜鏡,進行垂直方向掃瞄, 本研究所使用的 Trimble GS200 型三維雷射掃瞄儀即為縱掃式。 當掃瞄方式不同時,會造成不同定義的掃瞄角,可參照圖 2-4 所 示,因此計算坐標的公式也隨之改變。 圖 2-4、三維雷射掃瞄定位示意圖(賴志凱,2004) 如果是橫掃式的,則掃瞄點 P 的坐標依圖 2-4 上的 α 角和 β 角以及距離 S 進行計算;以上述條件,可用幾何關係列出公式 2-2 求得 P 點之三維坐標。
( )
α cos ' = S× S( )
α sin × = S xp( )
β cos( )
α cos( )
β cos '× = × × = S S yp( )
β cos( )
α sin( )
β sin '× = × × = S S zp ...(2-2) 如果是縱掃式的,如本研究所選用的 Trimble GS200 型雷射 掃瞄儀,則掃瞄點 P 的坐標依圖 2-4 上的 δ 角和 γ 角以及距離12 S 進行計算;以上述條件,可用幾何關係列出公式 2-3 求得 P 點 之三維坐標。
( )
δ cos " = S× S( )
γ sin( )
γ cos( )
δ sin "× = × × =S S xp( )
γ cos( )
γ cos( )
δ cos "× = × × =S S yp( )
δ sin × = S zp ...(2-3) 由上述的公式推導可以得知,不同的掃瞄方式因其所定義的 角度不同,因此求出的點位三維坐標也會有所不同。 茲將目前市面上雷射掃描儀之規格針對其雷射光波長、量測 原理、測距精度、視野範圍分為水平方向可旋轉之角度 H,垂直 方向可旋轉之角度 V、及最大測距範圍之不同做一比較(如表 2-1 所示)。 表 2-1、雷射掃描儀規格比較表(修改自 POB,2003) 型號 Callidus Cyrax 2500 I-SiTE GS200 GX200 ILRIS 3D LPM-2K製造商 Trimble Cyrax I-SiTE Trimble Trimble Optech Riegl
Eye Safety Class 1 Class 2 Class 1 Class 2 Class 2 Class 1 Class 3B
波長(nm) 905 532 904 532 532 N/A 900
13 Max Range(m) 150 100 450 700 700 800 Up to 2500 測距精度(mm) 5 5 25 6 6.5 10 50 IFOV(mrad) 0.17 0.12 3 0.06 N/A 0.3 0.25 掃瞄頻率(Hz) 28000 1000 6000 Up to 5000 Up to 5000 2000 4 H FOV(deg) 360 40 340 360 360 40 360 V FOV(deg) 180 40 80 60 60 40 195 H angular
Accuracy(deg) 0.017 N/A N/A N/A N/A N/A 0.009
V angular
Accuracy(deg) 0.03 N/A N/A N/A N/A N/A 0.009
2-3 座標轉換及精度分析模式
2-3-1 座標轉換: 掃描儀坐標系與物空間坐標系之關係可表示如圖 2-5 所示,其中 S 為掃描儀的位置,P 點為待測點的位置(掃瞄儀坐標系原點),O 點 為物空間坐標系的原點。ρ 為 S 到 P 之間的距離,α 為 S 與 P 點之 間的垂直角,θ 為其水平角。14 圖 2-5、掃描儀坐標系與物空間坐標系之關係圖(修改自 Lichti,2002) 由掃描坐標系轉換到物空間坐標系的數學式可寫成如 (2-4),利用三個或以上的物空間之已知控制點坐標進行轉換 (Lichti,2002)。 s p p Mr R → → → + =λ R ...(2-4)
[
]
T p p p p x y z r = → :P 點在掃描坐標系中的坐標向量。[
]
T p p p p X Y Z R = → :P 點在物空間坐標系中的坐標向量。[
]
T s s s s X Y Z R = → :掃描坐標系原點 S 在物空間坐標系的坐標向 量。M
為一分別繞 X、Y、Z 軸旋轉(ω、φ、κ)角度之旋轉矩陣。 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − + − − − + = φ ω φ ω φ κ φ ω κ ω κ φ ω κ ω κ φ κ φ ω κ ω κ φ ω κ ω κ φ cos cos cos sin sin sin sin cos cos sin sin sin sin cos cos sin cos cos sin cos sin sin cos sin sin sin cos cos cos M z x y S X Y Z ρ O yp xp zp yp xp xs ys 掃瞄儀坐標系 物空間坐標系 θ α s P zp zs15 λ為兩座標系之尺度參數 2-3-2 精度分析模式 對於掃描精度的分析,本研究從誤差、精確度與精密度三者 來進行分析探討。我們將各種不同狀況下的參考點位,分別共同 放置共軛球及反射標進行五次重複掃描成果後取平均值,在與其 參考座標相減,即可得到誤差量,如(2-5)。精確度則以 RMS 來 表示,經由轉換後的掃瞄座標與參考座標依(2-6)計算求得。 精密度則以 STD 來表示,將不同測站重複掃描座標之個別座標減 去其平均座標依(2-7)計算求得。 ...(2-5) ...(2-6) ...(2-7) 將(2-5)(2-6)(2-7)式中各種符號定義如下: A L L L= − Δ n L L RMS n i A Li
∑
= − = 1 2 ) ( 1 ) ( 1 2 − − =∑
= n L L STD n i Li A L X X X = − Δ{
X Y Z}
L= Δ ⋅Δ ⋅Δ Δ A LY
Y
Y
=
−
Δ
A L Z Z Z = − Δ16 為重複掃描座標之平均值 為全測儀所測得之參考座標 為掃描儀第 i 次之掃描座標
L
AL
LiL
17
第三章 共軛球與反射標之精度差異
三維雷射掃瞄儀除了本身儀器測距精度外,尚需搭配共軛基準 點或套合點所需掃描配件之定位精度,方能將其功能發揮,本研究 所選用的配件為原廠所率定的反射標及共軛球,為了能在現場使用 時的適用性,而將其交替使用,則二者的精度差異將大大的影響後 續點雲套合精度成果,故本章節將著重於共軛球與反射標之精度差 異分析。3-1 實驗場地
相關研究中發現,本型式的三維雷射掃瞄儀在 50 公尺的掃描 距離內,基本上精度還相當穩定維持在 6 公厘以內,這段範圍內的 精度與掃描距離的關係並不明顯,但在掃描距離超過 50 公尺之後, 掃描的標準偏差很明顯提高,而且與掃描距離呈現正相關(粘惎 非,2005)。 基於上述原因,為了消除儀器因長距離掃描所造成的定位誤 差,進而影響了掃描配件之定位精度差異比對,故本研究在高鐵青 埔站前之綠地設計了一個長約 50 公尺且平坦無遮蔽的實驗場(如 圖 3-1),18 圖 3-1、高鐵青埔站前之綠地
3-2 實驗設計
因共軛球與反射標的適用性不同,共軛球所適用的狀況為平面的 放置區,而反射標所適用的狀況為立面的放置區,無論是平面的放置 或立面的放置,二者都必須放置在相同點位的基礎上,才能做有效的 分析比對。 共軛球與反射標除了適用性不同外,其幾何形狀和規格尺寸也大 不相同,兩項配件的詳細規格如下表所示:(表 3-1)19 表 3-1、Target 與 Sphere 詳細規格表 幾何形狀 尺寸規格 Target 正方形貼紙 150mm*150mm Sphere 立體球搭配圓形 底座 立體球半徑:76.194mm 底座高:18mm 由於本研究所使用的控制點為平面點位,故吾人設計出共軛球 (以下簡稱 Sphere)及反射標(以下簡稱 Target) 的解決方案,以 Sphere 而言,將 Sphere 的底座求出圓心及半徑,製作在一白紙上, 以針頭貫穿圓心對準控制點後將 Sphere 底座合上, 即可確保 Shpere 的點位放置位置。反射標的放置則需考慮立面的狀態,因此將 Target 黏貼於一直角板上(如圖 3-2),利用 Target 的十字線,以垂直軸直 接對準點位,水平部分則以水準氣泡維持水平,以確保 Target 的點 位放置位置,最後將全測儀所測得之 X,Y,Z 軸向數據,依據表 3-1 之尺寸對 Z 軸向調整,即可推算出 Sphere 及 Target 中心之全測儀座 標系統。 本研究所使用之全測儀為 TOPCON GTS601,其測角精度為 1", 測距精度為±(2mm+2ppm)。本研究所使用外業測量軟體為 Trimble PointScape 2.1,內業處理軟體為 Trimble RealWork 4.1,座標轉
20
換之七參數部分則自行利用 Microsoft Visual Basic 6.0 撰寫。
圖 3-2、反射標垂直定點工具 下圖為本文中所使用之實驗設備:(圖 3-3、圖 3-4) 圖 3-3、全測站經緯儀 圖 3-4、三維雷射掃瞄儀 本文的實驗中,設計三維雷射掃瞄儀置於五個不同距離的測站 點,以 10m~50m,為依據,分析 Sphere 和 Target 在相同條件的距離 下精度之表現。 由三維雷射掃瞄儀掃描到之 Sphere 和 Target 均能由其專用軟 體求得其中心座標,但此兩種不管平面放置或與立面放置,在三維的
21
掃瞄儀的相對座標系統中,此兩種的中心座標並不會在同一座標點 上,所以為了比對兩者的差異性,必須要有一個媒介點,此媒介點我 們利用全測儀測出參考點來推算出兩者的相關性。
22 計算全測儀已知座標 分類整理點雲資料 進行七參數轉換 點雲資料套合 精度分析 匯出成果 設計試驗方法 選擇適當試驗場 佈設試驗點位 全測儀進行已知點觀測 架設三維雷射掃瞄 進入內業程序 掃瞄Target及Sphere 掃描成果檢查 資料錯誤 資料正確 圖 3-5、實驗流程圖
23
3-3 實驗成果
依據上述實驗流程,並將數據依 XYZ 各分量及總量 S,分別探討 在不同距離及長短距離的情況下,STD、RMS 及座標差值指標之差異 分析。 3-3-1 共軛球與反射標之精密度差異分析: 由表 3-2 可知,Target 在不同距離所求得三軸向的標準誤差, 在 X 軸向和 Y 軸向的精度均小於 1 公厘,Z 軸向的精度在 10 公尺及 50 公尺處,則大於 1 公厘。 由圖 3-6 可知,Target 在不同距離所求得三軸向的標準誤差,Z 軸向的精度明顯低於 X 軸向和 Y 軸向的精度。 表 3-2、反射標 STD 三軸向比較表(單位:m) 10m 20m 30m 40m 50m Targetσx 0.0002 0.0004 0.0002 0.0003 0.0004 Targetσy 0.0004 0.0003 0.0003 0.0001 0.0004 Targetσz 0.0010 0.0005 0.0006 0.0004 0.0014 0.0000 0.0002 0.0004 0.0006 0.0008 0.0010 0.0012 0.0014 0.0016 10m 20m 30m 40m 50m 距離 標 準誤差 Targetσx Targetσy Targetσz 圖 3-6、反射標 STD 三軸向誤差分佈圖24 由表 3-3 可知,Sphere 在不同距離所求得三軸向的標準誤差, 在 Z 軸向的精度均小於 1 公厘,X 軸向和 Y 軸向的精度在 10 公尺及 50 公尺處,則大於 1 公厘。 由圖 3-7 可知,Sphere 在不同距離所求得三軸向的標準誤差,Z 軸向的精度明顯平穩於 X 軸向和 Y 軸向的精度。 表 3-3、共軛球 STD 三軸向比較表(單位:m) 10m 20m 30m 40m 50m Sphereσx 0.0011 0.0003 0.0004 0.0008 0.0018 Sphereσy 0.0018 0.0002 0.0004 0.0003 0.0006 Sphereσz 0.0007 0.0006 0.0007 0.0007 0.0009 0.0000 0.0005 0.0010 0.0015 0.0020 10m 20m 30m 40m 50m 距離 標準 誤差 SphereσxSphereσy Sphereσz 圖 3-7、共軛球 STD 三軸向誤差分佈圖 由表 3-4 可知,Target 在不同距離所求得 X 軸向的標準誤差皆 小於 0.4 公厘,Sphere 在不同距離所求得 X 軸向的標準誤差皆小於 1.8 公厘,二者的最大較差值出現在 50 公尺處。 由圖 3-8 可知,Target 在 X 軸向標準誤差的離散程度並不大, Sphere 在 X 軸向標準誤差的離散程度較大的範圍,分別出現在 50 公
25 尺及 20 公尺處。二者在 X 軸向標準誤差之精度表現除了在 20 公尺處 以外,Target 在 X 軸向標準誤差的精度優於 Sphere 在 X 軸向標準誤 差的精度。 表 3-4、共軛球與反射標 STD X 軸向較差表(單位:m) 10m 20m 30m 40m 50m Targetσx 0.0002 0.0004 0.0002 0.0003 0.0004 Sphereσx 0.0011 0.0003 0.0004 0.0008 0.0018 較差 0.0009 0.0001 0.0002 0.0005 0.0014 0.0000 0.0005 0.0010 0.0015 0.0020 10m 20m 30m 40m 50m 距離 標準 誤差 Targetσx Sphereσx 圖 3-8、共軛球與反射標 STD X 軸向誤差分佈圖 由表 3-5 可知,Target 在不同距離所求得 Y 軸向的標準誤差皆 小於 0.41 公厘,Sphere 在不同距離所求得 X 軸向的標準誤差皆小於 1.76 公厘,二者的最大較差值出現在 10 公尺處。 由圖 3-9 可知,Target 在 Y 軸向標準誤差的離散程度並不大, Sphere 在 Y 軸向標準誤差的離散程度較大的範圍,出現在 10 公尺處。 二者在 Y 軸向標準誤差之精度表現除了在 20 公尺處以外,Target 在 Y 軸向標準誤差的精度優於 Sphere 在 Y 軸向標準誤差的精度。
26 表 3-5、共軛球與反射標 STD Y 軸向誤差較差表(單位:m) 10m 20m 30m 40m 50m Targetσy 0.0004 0.0003 0.0003 0.0001 0.0004 Sphereσy 0.0018 0.0002 0.0004 0.0003 0.0006 較差 0.0013 0.0001 0.0001 0.0002 0.0003 0.0000 0.0005 0.0010 0.0015 0.0020 10m 20m 30m 40m 50m 距離 標準誤差 Targetσy Sphereσy 圖 3-9、共軛球與反射標 STD Y 軸向誤差分佈圖 由表 3-6 可知,Target 在不同距離所求得 Z 軸向的標準誤差皆 小於 1.36 公厘,Sphere 在不同距離所求得 Z 軸向的標準誤差皆小於 0.9 公厘,二者的最大較差值出現在 50 公尺處。 由圖 3-10 可知,Sphere 在 Z 軸向標準誤差的離散程度並不大, Target 在 Z 軸向標準誤差的離散程度較大的範圍,出現在 10 公尺及 50 公尺處。二者在 Z 軸向標準誤差之精度表現除了在 10 公尺處及 50 公尺以外,Target 在 Y 軸向標準誤差的精度優於 Sphere 在 Y 軸向標 準誤差的精度。
27 表 3-6、共軛球與反射標 STD Z 軸向較差表(單位:m) 10m 20m 30m 40m 50m Targetσz 0.0010 0.0005 0.0006 0.0004 0.0014 Sphereσz 0.0007 0.0006 0.0007 0.0007 0.0009 較差 0.0003 0.0002 0.0000 0.0003 0.0005 0.0000 0.0002 0.0004 0.0006 0.0008 0.0010 0.0012 0.0014 0.0016 10m 20m 30m 40m 50m 距離 標準 誤差 Targetσz Sphereσz 圖 3-10、共軛球與反射標 STD Z 軸向誤差分佈圖 由表 3-7 可知,Target 在不同距離所求得三軸總量的標準誤差 皆小於 1.37 公厘,Sphere 在不同距離所求得三軸總量的標準誤差皆 小於 2.25 公厘,二者的最大較差值出現在 10 公尺處。 由圖 3-11 可知,Target 在三軸總量標準誤差的離散程度並不 大,Sphere 在三軸總量標準誤差的離散程度較大的範圍,出現在 10 公尺及 50 公尺處。Target 在三軸總量標準誤差的精度優於 Sphere 在三軸總量標準誤差的精度。
28 表 3-7、共軛球與反射標 STD 三軸總量較差表(單位:m) 10m 20m 30m 40m 50m Targetσs 0.0012 0.0007 0.0008 0.0005 0.0014 Sphereσs 0.0023 0.0008 0.0009 0.0011 0.0021 較差 0.0010 0.0001 0.0001 0.0006 0.0008 0.0000 0.0005 0.0010 0.0015 0.0020 0.0025 10m 20m 30m 40m 50m 距離 標準 誤差 Targetσs Sphereσs 圖 3-11、共軛球與反射標 STD 三軸總量誤差分佈圖 3-3-2 共軛球與反射標精確度差異分析 由表 3-8 可知,Target 在不同距離所求得三軸向的 RMS 指標差, 在 Z 軸向的精度均小於 1 公厘,X 軸向和 Y 軸向的精度除了在 10 公 尺及 20 公尺處外,其餘均大於 1 公厘。 由圖 3-12 可知,Target 在不同距離所求得三軸向的標準誤差, Z 軸向的精度明顯高於 X 軸向和 Y 軸向的精度。
29 表 3-8、反射標 RMS 三軸向比較表(單位:m) 10m 20m 30m 40m 50m Target RMS-X 0.00023 0.00026 0.00184 0.00095 0.00694 Target RMS-Y 0.00038 0.00024 0.00078 0.00181 0.00265 Target RMS-Z 0.00004 0.00002 0.00004 0.00004 0.00024 0.000000 0.001000 0.002000 0.003000 0.004000 0.005000 0.006000 0.007000 0.008000 10m 20m 30m 40m 50m 距離 R M S 誤差量 Target RMS-X Target RMS-Y Target RMS-Z 圖 3-12、反射標 RMS 三軸向誤差分佈圖 由表 3-9 可知,Sphere 在不同距離所求得三軸向的 RMS 指標差, 在 Z 軸向的精度均小於 1 公厘,X 軸向和 Y 軸向的精度除了在 50 公 尺處外,其餘均小於 1 公厘。 由圖 3-13 可知,Sphere 在不同距離所求得三軸向的標準誤差, Z 軸向的精度明顯高於 X 軸向和 Y 軸向的精度。 表 3-9、共軛球 RMS 三軸向比較表(單位:m) 10m 20m 30m 40m 50m Sphere RMS-X 0.00021 0.00038 0.00078 0.00063 0.00116 Sphere RMS-Y 0.00069 0.00076 0.00050 0.00038 0.00142 Sphere RMS-Z 0.00005 0.00005 0.00004 0.00002 0.00010
30 0.000000 0.000200 0.000400 0.000600 0.000800 0.001000 0.001200 0.001400 0.001600 10m 20m 30m 40m 50m Sphere RMS-X Sphere RMS-Y Sphere RMS-Z 圖 3-13、共軛球 RMS 三軸向誤差分佈圖 由表 3-10 可知,Target 在不同距離所求得 X 軸向的 RMS 指標差 除了 50 公尺外皆小於 1.84 公厘,Sphere 在不同距離所求得 X 軸向 的 RMS 指標差皆小於 1.16 公厘,二者的最大較差值出現在 50 公尺處。 由圖 3-14 可知,Sphere 在 X 軸向的 RMS 指標差的離散程度並不 大,Target 在 X 軸向的 RMS 指標差的離散程度較大的範圍,出現在 50 公尺處。二者在 X 軸向的 RMS 指標差之精度表現除了在 20 公尺處 以外,Sphere 在 X 軸向的 RMS 指標差的精度優於 Target 在 X 軸向的 RMS 指標差。 表 3-10、共軛球與反射標 RMS X 軸向較差表(單位:m) 10m 20m 30m 40m 50m Target RMS-X 0.00023 0.00026 0.00184 0.00095 0.00694 Sphere RMS-X 0.00021 0.00038 0.00078 0.00063 0.00116 較差 0.00002 0.00012 0.00106 0.00033 0.00577
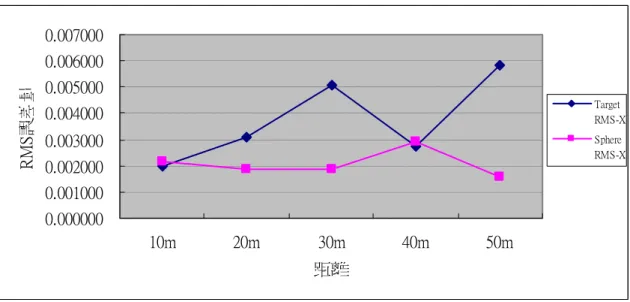
31 0.000 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 Target RMS-X Sphere RMS-X 圖 3-14、共軛球與反射標 RMS-X 軸向誤差分佈圖 由表 3-11 可知,Target 在不同距離所求得 Y 軸向的 RMS 指標差 皆小於 2.65 公厘,Sphere 在不同距離所求得 Y 軸向的 RMS 指標差皆 小於 1.9 公厘,二者的最大較差值出現在 40 公尺處。 由圖 3-15 可知,Sphere 在 Y 軸向的 RMS 指標差的離散程度及 Target 在 Y 軸向的 RMS 指標差的離散程度較大的範圍,出現在 40 公 尺處。二者在 Y 軸向的 RMS 指標差之精度表現除了在 10 公尺及 20 公 尺處以外,Sphere 在 Y 軸向的 RMS 指標差的精度優於 Target 在 Y 軸 向的 RMS 指標差。 表 3-11、共軛球與反射標 RMS Y 軸向較差表(單位:m) 10m 20m 30m 40m 50m Target RMS-Y 0.00038 0.00024 0.00078 0.00181 0.00265 Sphere RMS-Y 0.00069 0.00076 0.00050 0.00038 0.00142 較差 0.00031 0.00053 0.00028 0.00144 0.00122
32 0.0000 0.0005 0.0010 0.0015 0.0020 0.0025 0.0030 10m 20m 30m 40m 50m 距離 RM S 誤差量 Target RMS-Y Sphere RMS-Y 圖 3-15、共軛球與反射標 RMS-Y 軸向誤差分佈圖 由表 3-12 可知,Target 在不同距離所求得 Z 軸向的 RMS 指標差 皆小於 0.24 公厘,Sphere 在不同距離所求得 Z 軸向的 RMS 指標差皆 小於 0.1 公厘,二者的最大較差值出現在 50 公尺處。 由圖 3-16 可知,Sphere 在 Z 軸向的 RMS 指標差的離散程度並不 大,Target 在 Z 軸向的 RMS 指標差的離散程度較大的範圍,出現在 50 公尺處。二者在 Z 軸向的 RMS 指標差之精度表現除了在 10 公尺及 20 公尺處以外,Sphere 在 Z 軸向的 RMS 指標差的精度優於 Target 在 Z 軸向的 RMS 指標差。 表 3-12、共軛球與反射標 RMS-Z 軸向較差表(單位:m) 10m 20m 30m 40m 50m Target RMS-Z 0.00004 0.00002 0.00004 0.00004 0.00024 Sphere RMS-Z 0.00005 0.00005 0.00004 0.00002 0.00010 較差 0.00001 0.00003 0.00000 0.00002 0.00014
33 0.0000 0.0001 0.0001 0.0002 0.0002 0.0003 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 Target RMS-Z Sphere RMS-Z 圖 3-16、共軛球與反射標 RMS-Z 軸向誤差分佈圖 由表 3-13 可知,Target 在不同距離所求得單位權的 RMS 指標差 除了 50 公尺外皆小於 2.05 公厘,Sphere 在不同距離所求得單位權 的 RMS 指標差皆小於 1.84 公厘,二者的最大較差值出現在 50 公尺處。 由圖 3-17 可知,Sphere 在單位權的 RMS 指標差的離散程度並不 大,Target 在單位權的 RMS 指標差的離散程度較大的範圍,出現在 50 公尺處。二者在單位權的 RMS 指標差之精度表現除了在 10 公尺及 20 公尺處以外,Sphere 在單位權的 RMS 指標差的精度優於 Target 在 單位權的 RMS 指標差。 表 3-13、共軛球與反射標 RMS-單位權較差表(單位:m) 10m 20m 30m 40m 50m Target RMS-單位權 0.00044 0.00035 0.00199 0.00205 0.00743 Sphere RMS-單位權 0.00072 0.00085 0.00092 0.00073 0.00184 較差 0.00028 0.00050 0.00107 0.00132 0.00559
34 0.000 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 10m 20m 30m 40m 50m 距離 R M S 誤差量 Target RMS-單位權 Sphere RMS-單位權 圖 3-17、共軛球與反射標 RMS-單位權誤差分佈圖 3-3-3 共軛球與反射標座標差值差異分析 由表 3-14 可知,Target 在不同距離所求得的座標差值指標除了 50 公尺外皆小於 2.03 公厘,Sphere 在不同距離所求得的座標差值指 標皆小於 1.73 公厘,二者的最大較差值出現在 50 公尺處。 由圖 3-18 可知,Sphere 在的座標差值指標的離散程度並不大, Target 在的座標差值指標的離散程度較大的範圍,出現在 50 公尺 處。二者在的座標差值指標之精度表現除了在 10 公尺及 20 公尺處以 外,Sphere 在的座標差值指標的精度優於 Target 在的座標差值指標。 表 3-14、共軛球與反射標座標差值較差表(單位:m) 10m 20m 30m 40m 50m Target △S 0.00038 0.00029 0.00199 0.00203 0.00686 Sphere △S 0.00066 0.00060 0.00091 0.00073 0.00173 較差 0.00028 0.00030 0.00107 0.00131 0.00513
35 0.000 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 10m 20m 30m 40m 50m 距離 誤差 Target △S Sphere △S 圖 3-18、共軛球與反射標座標差值誤差分佈圖 經由本章實驗成果發現,當儀器換站重新啟動時,儀器內部之局 部座標系統將重新歸算,使在不同測站各分量的基礎座標系統並不一 致,故難判斷各分量之特定趨勢。 另外由 Boehler.et al 指出,本研究所選用的儀器 Trimble GS200,測量近距離時,精度表現較差;本章實驗圖 3-13 發現,在 10 公尺處之 STD,確實產生誤差較大的情況,在 20 公尺以後之誤差 仍隨著距離增加而增大。
36
第四章 長短距離對共軛球與反射標點雲套合之精度
差異
前章除了得知 Sphere 及 Target 本身對於三維雷射掃瞄儀精度的 表現外,實際上,共軛點與待測點雲常因現場條件的限制,產生測站 與二者間相對的位置施測,故本章在此狀況下,模擬上述情況,套合 點雲之精度。4-1 實驗設計
延續前章對 Sphere 及 Target 的闡述,並使用相同的方法進行點 位的擺放,唯對於實驗場地的選擇略作修正,為凸顯本章節對於長短 距離之需求,故一樣在高鐵青埔站前之綠地設計了一個半徑約 50 公 尺且平坦無遮蔽的扇形實驗場(如圖 4-1 所示),下列為實驗場配置說 明。 因為解算方程式未知數的關係,在空間座標的轉換上必須有三個 共軛點情況,所以吾人分別在二個控制點區,I 區及Ⅱ區,分別測設 三個已知點,來作為座標轉換的依據 I 區的點位編號為 1 號點,2 號點及 3 號點,在Ⅱ區的點位之編 號為 4 號點,5 號點及 6 號點,在 I,Ⅱ區相對於三維雷射掃瞄儀的 距離分別為第一站,距離 I 區為 10m,距離Ⅱ區為 50M;第二站距 I37 區為 20M,距Ⅱ區為 50M,第三站距 I 區為 30M 距Ⅱ區為 50M; 第四 站距 I 區為 40M,距Ⅱ區為 50M;第五站距 I 區為 50M,距Ⅱ區為 50M; 所以Ⅱ區定義為長距離,I 區定義為短距離。 本章除了測試長短距離對點雲套合之精度影響外,配件的選擇不 同勢必也會產生差異性,而且本儀器可在不整平的狀態下,進行觀 測,因此本研究將分成三組實驗(如表 4-1 所示),便於後續之分析比 對。 圖 4-1、三為雷射掃瞄儀配置平面圖 1 號點 2 號點 3 號點 6 號點 5 號點 4 號點
38 表 4-1、試驗分組表 型式 固定區 轉置區 Target Sphere Ⅱ456 Ⅰ123 Target 第一組 Sphere Ⅰ123 Ⅱ456 Target Sphere Ⅱ246 Ⅰ13 Target 第二組 Sphere Ⅰ135 Ⅱ46 Target Sphere Ⅱ456 Ⅰ123 Target ︵儀器整平︶ 第三組 Sphere Ⅰ123 Ⅱ456
4-2 實驗成果
首先討論儀器未整平之不同距離下 I 區及Ⅱ區,6 個共軛控制點 使用座標轉換的方式探討其整體與參考座標之精度表現。之後再分別 以第一組 I 區之 1 號點,2 號點及 3 號點(以下簡稱Ⅰ-123)及Ⅱ區 4 號點,5 號點及 6 號點(簡稱Ⅱ-456)與第二組 I 區之 1 號點,3 號點及 5 號點(以下簡稱Ⅰ-135)及Ⅱ區 2 號點,4 號點及 6 號點(簡 稱Ⅱ-246)及第三組儀器整平後 I 區之 1 號點,2 號點及 3 號點(以39 下簡稱Ⅰ-123)及Ⅱ區 4 號點,5 號點及 6 號點(簡稱Ⅱ-456),分 別當作固定點及點雲轉置,進而探討此狀況的精度表現。 4-2-1 儀器未整平之全區域座標轉換之精度分析 本節主要以 1、2、3、4、5、6 號點分別對 Target 及 Sphere 進 行七參數轉換後,與參考點位座標相互比較。探討在不同距離下座標 轉換後的精度成果。 由表 4-2 可知,Target 在全區套合點雲座標的情況下,所獲得 的 RMS 指標,在 X 軸向和 Y 軸向的精度約落在 0.8 公厘~5.8 公厘之 間,Z 軸向的精度在 40 公尺及 50 公尺處,則達到公分級精度。 由圖 4-2 可知,Target 在全區套合點雲座標的情況下,X 軸向和 Y 軸向的誤差較 Z 軸向平穩,但 Z 軸向的誤差在距離遠處呈現偏高趨 勢。 表 4-2、全區套合 Target 之 RMS 三軸向比較表 10m 20m 30m 40m 50m Target RMS-X 0.0020 0.0031 0.0051 0.0027 0.0058 Target RMS-Y 0.0007 0.0007 0.0040 0.0008 0.0025 Target RMS-Z 0.0027 0.0010 0.0054 0.0113 0.0145
40 0.000000 0.002000 0.004000 0.006000 0.008000 0.010000 0.012000 0.014000 0.016000 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 Target RMS-X Target RMS-Y Target RMS-Z 圖 4-2、全區套合 Target 之 RMS 三軸向誤差分佈圖 由表 4-3 可知,Sphere 在全區套合點雲座標的情況下,所獲得 的 RMS 指標,在 X 軸向和 Y 軸向的精度約落在 0.9 公厘~3 公厘之間, Z 軸向的精度在 40 公尺及 50 公尺處,則達到公分級精度。 由圖 4-3 可知,Sphere 在全區套合點雲座標的情況下,X 軸向和 Y 軸向的誤差較 Z 軸向平穩,但 Z 軸向的誤差在距離遠處呈現偏高的 趨勢。 表 4-3、全區套合 Sphere 之 RMS 三軸向比較表 10m 20m 30m 40m 50m Sphere RMS-X 0.0021 0.0019 0.0019 0.0029 0.0016 Sphere RMS-Y 0.0014 0.0011 0.0009 0.0030 0.0016 Sphere RMS-Z 0.0026 0.0010 0.0061 0.0111 0.0151
41 0.000000 0.002000 0.004000 0.006000 0.008000 0.010000 0.012000 0.014000 0.016000 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 SphereRMS-X Sphere RMS-Y Sphere RMS-Z 圖 4-3、全區套合 Sphere 之 RMS 三軸向誤差分佈圖 由表 4-4 可知,Target 在全區套合點雲座標的情況下,X 軸向所 獲得的 RMS 指標最大值為 5.8 公厘,Sphere 在全區套合點雲座標的 情況下,X 軸向所獲得的 RMS 指標最大值為 2.9 公厘,二者的最大較 差值出現在 50 公尺處。 由圖 4-4 可知,Sphere 在全區套合點雲座標的情況下,X 軸向的 RMS 指標差的離散程度並不大,Target 在全區套合點雲座標的情況 下,X 軸向的 RMS 指標差的離散程度較大的範圍,出現在 30 公尺及 50 公尺處。二者在 X 軸向的 RMS 指標差之精度表現除了在 30 公尺及 50 公尺處以外,二者約略相當。 表 4-4、全區套合 Sphere 與 Target 之 RMS-X 軸向比較表 10m 20m 30m 40m 50m Target RMS-X 0.0020 0.0031 0.0051 0.0027 0.0058 Sphere RMS-X 0.0021 0.0019 0.0019 0.0029 0.0016 較差 0.0002 0.0012 0.0032 0.0002 0.0042
42 0.000000 0.001000 0.002000 0.003000 0.004000 0.005000 0.006000 0.007000 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 Target RMS-X Sphere RMS-X 圖 4-4、全區套合 Sphere 與 Target 之 RMS-X 軸向誤差分佈圖 由表 4-5 可知,Target 在全區套合點雲座標的情況下,Y 軸向所 獲得的 RMS 指標最大值為 4 公厘,Sphere 在全區套合點雲座標的情 況下,Y 軸向所獲得的 RMS 指標最大值為 3 公厘,二者的最大較差值 出現在 30 公尺處。 由圖 4-5 可知,Sphere 在全區套合點雲座標的情況下,Y 軸向的 RMS 指標差的離散程度較大的範圍,出現在 40 公尺處,Target 在全 區套合點雲座標的情況下,Y 軸向的 RMS 指標差的離散程度較大的範 圍,出現在 30 公尺及 50 公尺處。二者在 Y 軸向的 RMS 指標差之精度 表現除了在 30 公尺及 40 公尺處以外,二者約略相當。
表 4-5、全區套合 Sphere 與 Target 之 RMS-Y 軸向比較表
10m 20m 30m 40m 50m
Target RMS-Y 0.0007 0.0007 0.0040 0.0008 0.0025 Sphere RMS-Y 0.0014 0.0011 0.0009 0.0030 0.0016 較差 0.0007 0.0005 0.0032 0.0022 0.0009
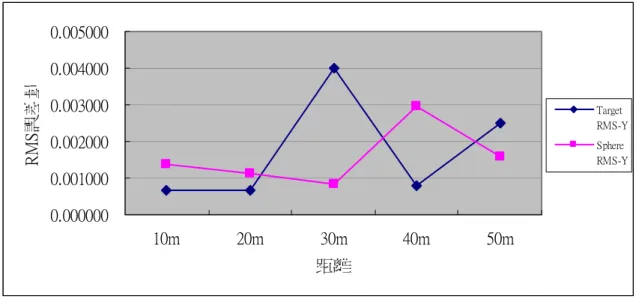
43 0.000000 0.001000 0.002000 0.003000 0.004000 0.005000 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 Target RMS-Y Sphere RMS-Y
圖 4-5、全區套合 Sphere 與 Target 之 RMS-Y 軸向誤差分佈圖
由表 4-6 可知,Target 在全區套合點雲座標的情況下,Z 軸向所 獲得的 RMS 指標最大值為 1.45 公分,Sphere 在全區套合點雲座標的 情況下,Z 軸向所獲得的 RMS 指標最大值為 1.51 公分,二者的最大 較差值出現在 30 公尺及 50 公尺處。 由圖 4-6 可知,Sphere 在全區套合點雲座標的情況下,Z 軸向的 RMS 指標差的離散程度較大的範圍,出現在 20 公尺處,Target 在全 區套合點雲座標的情況下,Z 軸向的 RMS 指標差的離散程度較大的範 圍,出現在 20 公尺處。二者在 Z 軸向的 RMS 指標差之精度表現,二 者約略相當。 表 4-6、全區套合 Sphere 與 Target 之 RMS-Z 軸向比較表 10m 20m 30m 40m 50m Target RMS-Z 0.0027 0.0010 0.0054 0.0113 0.0145 Sphere RMS-Z 0.0026 0.0010 0.0061 0.0111 0.0151 較差 0.0001 0.0000 0.0006 0.0002 0.0006
44 0.000000 0.002000 0.004000 0.006000 0.008000 0.010000 0.012000 0.014000 0.016000 10m 20m 30m 40m 50m 距離 R M S 誤差量 Target RMS-Z Sphere RMS-Z 圖 4-6、全區套合 Sphere 與 Target 之 RMS-Z 軸向誤差分佈圖 由表 4-7 可知,Target 在全區套合點雲座標的情況下,所獲得 的單位權 RMS 指標最大值為 1.58 公分,Sphere 在全區套合點雲座標 的情況下,所獲得的單位權 RMS 指標最大值為 1.53 公分,二者的最 大較差值出現在 30 公尺處。 由圖 4-7 可知,Sphere 在全區套合點雲座標的情況下,單位權 的 RMS 指標差的離散程度較大的範圍,出現在 20 公尺處,Target 在 全區套合點雲座標的情況下,單位權的 RMS 指標差的離散程度較大的 範圍,出現在 20 公尺處。二者在單位權的 RMS 指標差之精度表現, 二者約略相當。 表 4-7、全區套合 Sphere 與 Target 之 RMS-單位權比較表 10m 20m 30m 40m 50m Target RMS-單位權 0.0034 0.0033 0.0085 0.0116 0.0158 Sphere RMS-單位權 0.0036 0.0024 0.0064 0.0119 0.0153 較差 0.0002 0.0009 0.0021 0.0002 0.0006
45 0.00000 0.00200 0.00400 0.00600 0.00800 0.01000 0.01200 0.01400 0.01600 0.01800 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 Target RMS-單位權 Sphere RMS-單位權 圖 4-7、全區套合 Sphere 與 Target 之 RMS-單位權誤差分佈圖 由表 4-8 可知,Target 在全區套合點雲座標的情況下,所獲得 的座標差值指標最大值為 1.43 公分,Sphere 在全區套合點雲座標的 情況下,所獲得的座標差值指標最大值為 1.37 公分,二者的最大較 差值出現在 30 公尺處。 由圖 4-8 可知,Sphere 在全區套合點雲座標的情況下,座標差 值指標差的離散程度較大的範圍,出現在 20 公尺處,Target 在全區 套合點雲座標的情況下,座標差值指標差的離散程度較大的範圍,出 現在 20 公尺處。二者在單位權的 RMS 指標差之精度表現,二者約略 相當。 表 4-8、全區套合 Sphere 與 Target 之座標差值較差表 10m 20m 30m 40m 50m Target △S 0.0031 0.0028 0.0079 0.0105 0.0143 Sphere △S 0.0034 0.0021 0.0056 0.0106 0.0137 較差 0.0002 0.0007 0.0022 0.0000 0.0007
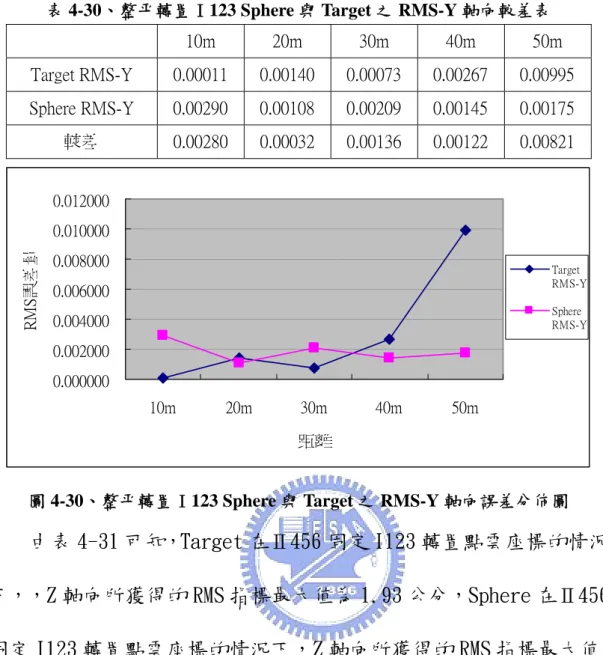
46 0.00000 0.00200 0.00400 0.00600 0.00800 0.01000 0.01200 0.01400 0.01600 10m 20m 30m 40m 50m 距離 誤差量 Target △S Sphere △S 圖 4-8、全區套合 Sphere 與 Target 之座標差值誤差分佈圖 4-2-2 第一組試驗 本節主要在儀器未整平的情況下,分別以短距離控制,長距離套 合及長距離控制,短距離套合,並藉用Ⅰ區固定Ⅱ區轉置及Ⅱ區固定 Ⅰ區轉置的方式,模擬在長短距離下共軛球與反射標之精度差異分 析。 由表 4-9 可知,Target 在Ⅱ456 固定轉置 I123 點雲座標的情況 下,所獲得的 RMS 指標,在 X 軸向和 Y 軸向的精度約 2 公分~17.5 公 分,Z 軸向的精度在 50 公尺處,則達到約 3.49 公尺。 由圖 4-9 可知,Target 在Ⅱ456 固定轉置 I123 點雲座標的情況 下,Z 軸向的精度明顯低於 X 軸向和 Y 軸向的精度。
47 表 4-9、轉置Ⅰ123 Target 之 RMS 三軸向比較表 10m 20m 30m 40m 50m Target RMS-X 0.036 0.052 0.175 0.031 0.059 Target RMS-Y 0.051 0.082 0.085 0.069 0.101 Target RMS-Z 0.104 0.049 1.225 2.597 3.490 0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 Target RMS-X Target RMS-Y Target RMS-Z 圖 4-9、轉置Ⅰ123 Target 之 RMS 三軸向誤差分佈圖 由表 4-10 可知,Sphere 在Ⅱ456 固定轉置 I123 點雲座標的情況 下,所獲得的 RMS 指標,在 X 軸向和 Y 軸向的精度約 0.3 公分~9 公 分,Z 軸向的精度在 50 公尺處,則達到約 3.502 公尺。 由圖 4-10 可知,Sphere 在Ⅱ456 固定轉置 I123 點雲座標的情況 下,Z 軸向的精度明顯低於 X 軸向和 Y 軸向的精度。 表 4-10、轉置Ⅰ123 Sphere 之 RMS 三軸向比較表 10m 20m 30m 40m 50m Sphere RMS-X 0.050 0.010 0.003 0.010 0.090 Sphere RMS-Y 0.016 0.066 0.038 0.087 0.079 Sphere RMS-Z 0.508 0.149 1.386 2.492 3.502
48 0.000000 0.500000 1.000000 1.500000 2.000000 2.500000 3.000000 3.500000 4.000000 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 SphereRMS-X Sphere RMS-Y Sphere RMS-Z 圖 4-10、轉置Ⅰ123 Sphere 之 RMS 三軸向誤差分佈圖 由表 4-11 可知,Target 在 I123 固定轉置Ⅱ456 點雲座標的情況 下,所獲得的 RMS 指標,在 X 軸向和 Y 軸向的精度約 1 公分~5 公分, Z 軸向的精度在 50 公尺處,則達到約 2.36 公尺。 由圖 4-11 可知,Target 在 I123 固定轉置Ⅱ456 點雲座標的情況 下,Z 軸向的精度明顯低於 X 軸向和 Y 軸向的精度。 表 4-11、轉置Ⅱ456 Target 之 RMS 三軸向比較表 10m 20m 30m 40m 50m Target RMS-X 0.0104 0.0037 0.0174 0.0138 0.0292 Target RMS-Y 0.0078 0.0321 0.0507 0.0193 0.0069 Target RMS-Z 0.2823 0.2030 1.0956 2.1269 2.3618
49 0.000000 0.500000 1.000000 1.500000 2.000000 2.500000 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 Target RMS-X Target RMS-Y Target RMS-Z 圖 4-11、轉置Ⅱ456 Target 之 RMS 三軸向誤差分佈圖 由表 4-12 可知,Sphere 在 I123 固定轉置Ⅱ456 點雲座標的情況 下,所獲得的 RMS 指標,在 X 軸向和 Y 軸向的精度約 0.2 公分~10 公 分,Z 軸向的精度在 50 公尺處,則達到約 2.77 公尺。 由圖 4-12 可知,Sphere 在 I123 固定轉置Ⅱ456 點雲座標的情況 下,Z 軸向的精度明顯低於 X 軸向和 Y 軸向的精度。 表 4-12、轉置Ⅱ456 Sphere 之 RMS 三軸向比較表 10m 20m 30m 40m 50m Sphere RMS-X 0.0094 0.0144 0.0036 0.0098 0.1028 Sphere RMS-Y 0.0195 0.0219 0.0201 0.0145 0.0022 Sphere RMS-Z 0.1238 0.1817 1.1092 2.0906 2.7747
50 0.000000 0.500000 1.000000 1.500000 2.000000 2.500000 3.000000 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 SphereRMS-X Sphere RMS-Y Sphere RMS-Z 圖 4-12、轉置Ⅱ456 Sphere 之 RMS 三軸向誤差分佈圖 經由本節實驗得知,若三個共軛固定點過於集中於ㄧ區域內及儀 器直立軸不垂直,將造成套合轉置的誤差甚巨,故下節之實驗,首先 將固定點分布情況稍作調整後,分析其轉置數據之精度變化;其二, 將儀器整平促使儀器直立軸垂直後,分析其轉置數據之精度變化。 4-2-3 第二組、Ⅱ-246 固定,Ⅰ-13 轉置 依本章 4-2-2 節可知,若三個共軛固定點過於集中於ㄧ區域內, 無論是Ⅰ區或Ⅱ區固定或轉置,其點雲套合精度皆發生套合誤差過大 的問題,故本節還是以長距離控制,短距離套合的方式,但將Ⅱ區的 5 號點轉換成 2 號點固定,以此模擬在長短距離下共軛球與反射標之 精度差異分析。 由表 4-13 可知,Target 在Ⅱ246 固定 I13 轉置點雲座標的情況 下,所獲得的 RMS 指標,在 X 軸向和 Y 軸向的精度約 0.6 公厘~1.5
51 公分之間,Z 軸向的精度在 50 公尺處,則約 2.3 公分。 由圖 4-13 可知,Target 在Ⅱ246 固定 I13 轉置點雲座標的情況 下, Z 軸向的精度明顯低於 X 軸向和 Y 軸向的精度。 表 4-13、轉置Ⅰ13 Target 之 RMS 三軸向比較表 10m 20m 30m 40m 50m Target RMS-X 0.00059 0.00126 0.00537 0.00196 0.01504 Target RMS-Y 0.00041 0.00092 0.00099 0.00105 0.00479 Target RMS-Z 0.00643 0.00260 0.01013 0.02001 0.02349 0.000000 0.005000 0.010000 0.015000 0.020000 0.025000 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 Target RMS-X Target RMS-Y Target RMS-Z 圖 4-13、轉置Ⅰ13 Target 之 RMS 三軸向誤差分佈圖 由表 4-14 可知,Sphere 在Ⅱ246 固定 I13 轉置點雲座標的情況 下,所獲得的 RMS 指標,在 X 軸向和 Y 軸向的精度約 0.4 公厘~3 公 厘,Z 軸向的精度在 50 公尺處,則約 2.6 公分。 由圖 4-14 可知,Sphere 在Ⅱ246 固定 I13 轉置點雲座標的情況 下, Z 軸向的精度明顯低於 X 軸向和 Y 軸向的精度。
52 表 4-14、轉置Ⅰ13 Sphere 之 RMS 三軸向比較表 10m 20m 30m 40m 50m Sphere RMS-X 0.00047 0.00141 0.00299 0.00115 0.00161 Sphere RMS-Y 0.00118 0.00131 0.00086 0.00201 0.00143 Sphere RMS-Z 0.00478 0.00231 0.01061 0.01960 0.02624 0.000000 0.005000 0.010000 0.015000 0.020000 0.025000 0.030000 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 SphereRMS-X Sphere RMS-Y Sphere RMS-Z 圖 4-14、轉置Ⅰ13 Sphere 之 RMS 三軸向誤差分佈圖 由表 4-15 可知,Target 在Ⅱ246 固定 I13 轉置點雲座標的情況 下,X 軸向所獲得的 RMS 指標最大值為 15 公厘,Sphere 在Ⅱ246 固 定 I13 轉置點雲座標的情況下,X 軸向所獲得的 RMS 指標最大值為 3 公厘,二者的最大較差值出現在 50 公尺處。 由圖 4-15 可知,Sphere 在Ⅱ246 固定 I13 轉置點雲座標的情況 下,X 軸向的 RMS 指標差的離散程度並不大,Target 在Ⅱ246 固定 I13 轉置點雲座標的情況下,X 軸向的 RMS 指標差的離散程度較大的範 圍,出現在 50 公尺處。二者在 X 軸向的 RMS 指標差之精度表現除了 在 50 公尺處以外,二者約略相當。
53 表 4-15、轉置Ⅰ13 Sphere 與 Target 之 RMS-X 軸向較差表 10m 20m 30m 40m 50m Target RMS-X 0.00059 0.00126 0.00537 0.00196 0.01504 Sphere RMS-X 0.00047 0.00141 0.00299 0.00115 0.00161 較差 0.00012 0.00015 0.00237 0.00082 0.01342 0.000000 0.002000 0.004000 0.006000 0.008000 0.010000 0.012000 0.014000 0.016000 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 Target RMS-X Sphere RMS-X 圖 4-15、轉置Ⅰ13 Sphere 與 Target 之 RMS-X 軸向誤差分佈圖 由表 4-16 可知,Target 在Ⅱ246 固定 I13 轉置點雲座標的情況 下,Y 軸向所獲得的 RMS 指標最大值為 4.79 公厘,Sphere 在Ⅱ246 固定 I13 轉置點雲座標的情況下,Y 軸向所獲得的 RMS 指標最大值為 2 公厘,二者的最大較差值出現在 50 公尺處。 由圖 4-16 可知,Sphere 在Ⅱ246 固定 I13 轉置點雲座標的情況 下,Y 軸向的 RMS 指標差的離散程度並不大,Target 在Ⅱ246 固定 I13 轉置點雲座標的情況下,Y 軸向的 RMS 指標差的離散程度較大的範 圍,出現在 50 公尺處。二者在 Y 軸向的 RMS 指標差之精度表現除了 在 50 公尺處以外,二者約略相當。
54
表 4-16、轉置Ⅰ13 Sphere 與 Target 之 RMS-Y 軸向較差表
10m 20m 30m 40m 50m Target RMS-Y 0.00041 0.00092 0.00099 0.00105 0.00479 Sphere RMS-Y 0.00118 0.00131 0.00086 0.00201 0.00143 較差 0.00077 0.00039 0.00013 0.00096 0.00336 0.000000 0.001000 0.002000 0.003000 0.004000 0.005000 0.006000 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 Target RMS-Y Sphere RMS-Y
圖 4-16、轉置Ⅰ13 Sphere 與 Target 之 RMS-Y 軸向誤差分佈圖
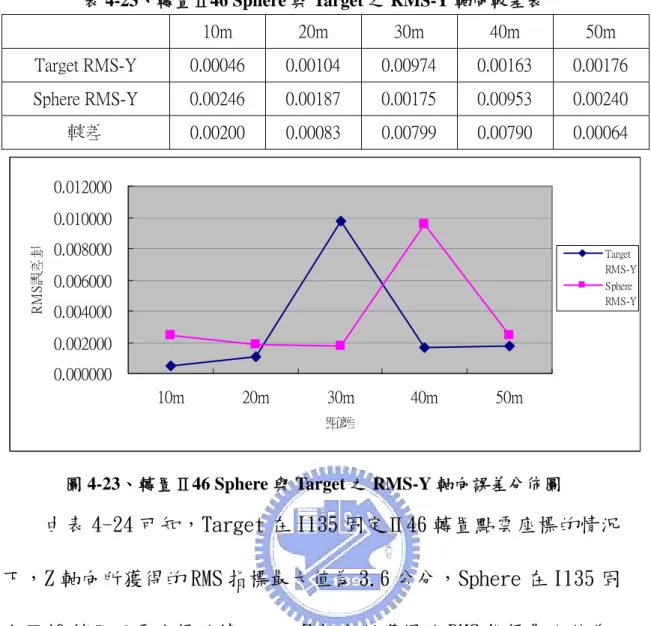
由表 4-17 可知,Target 在Ⅱ246 固定 I13 轉置點雲座標的情況 下,Z 軸向所獲得的 RMS 指標最大值為 2.62 公分,Sphere 在Ⅱ246 固定 I13 轉置點雲座標的情況下,Z 軸向所獲得的 RMS 指標最大值為 2.75 公分,二者的最大較差值出現在 50 公尺處。
由圖 4-17 可知,Sphere 與 Target 在Ⅱ246 固定 I13 轉置點雲座 標的情況下,Z 軸向的 RMS 指標差的離散程度較大的範圍均發生在 20 公尺處,二者在 Z 軸向的 RMS 指標差之精度表現除了在 50 公尺處以 外,二者約略相當。
55 表 4-17、轉置Ⅰ13 Sphere 與 Target 之 RMS-Z 軸向較差表 10m 20m 30m 40m 50m Target RMS-Z 0.00643 0.00260 0.01013 0.02001 0.02349 Sphere RMS-Z 0.00478 0.00231 0.01061 0.01960 0.02624 較差 0.00164 0.00029 0.00048 0.00041 0.00275 0.000000 0.005000 0.010000 0.015000 0.020000 0.025000 0.030000 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 Target RMS-Z Sphere RMS-Z 圖 4-17、轉置Ⅰ13 Sphere 與 Target 之 RMS-Z 軸向誤差分佈圖 由表 4-18 可知,Target 在Ⅱ246 固定 I13 轉置點雲座標的情況 下,所獲得的單位權 RMS 指標最大值為 4.32 公分,Sphere 在Ⅱ246 固定 I13 轉置點雲座標的情況下,所獲得的單位權 RMS 指標最大值為 2.83 公分,二者的最大較差值出現在 50 公尺處。
由圖 4-18 可知,Sphere 與 Target 在Ⅱ246 固定 I13 轉置點雲座 標的情況下,單位權 RMS 指標差的離散程度較大的範圍均發生在 20 公尺處,二者在單位權的 RMS 指標差約略相當。
56 表 4-18、轉置Ⅰ13 Sphere 與 Target 之 RMS 單位權較差表 10m 20m 30m 40m 50m Target RMS-單位權 0.00647 0.00303 0.01151 0.02013 0.02830 Sphere RMS-單位權 0.00495 0.00301 0.01106 0.01974 0.02633 較差 0.00152 0.00002 0.00045 0.00039 0.00197 0.00000 0.00500 0.01000 0.01500 0.02000 0.02500 0.03000 10m 20m 30m 40m 50m 距離 RM S 誤 差 量 Target RMS-單位權 Sphere RMS-單位權 圖 4-18、轉置Ⅰ13 Sphere 與 Target 之 RMS 單位權誤差分佈圖 由表 4-19 可知,Target 在Ⅱ246 固定 I13 轉置點雲座標的情況 下,所獲得的座標差值指標最大值為 2.6 公分,Sphere 在Ⅱ246 固定 I13 轉置點雲座標的情況下,所獲得的座標差值指標最大值為 2.4 公 分,二者的最大較差值出現在 50 公尺處。
由圖 4-19 可知,Sphere 與 Target 在Ⅱ246 固定 I13 轉置點雲座 標的情況下,座標差值指標差的離散程度較大的範圍均發生在 20 公 尺處,二者在座標差值指標差約略相當。
57 表 4-19、轉置Ⅰ13 Sphere 與 Target 之座標差值較差表 10m 20m 30m 40m 50m Target △S 0.00617 0.00282 0.01130 0.01832 0.02634 Sphere △S 0.00489 0.00271 0.01014 0.01790 0.02368 較差 0.00127 0.00011 0.00116 0.00042 0.00266 0.00000 0.00500 0.01000 0.01500 0.02000 0.02500 0.03000 10m 20m 30m 40m 50m 距離 誤差量 Target △S Sphere △S 圖 4-19、轉置Ⅰ13 Sphere 與 Target 之座標差值誤差分佈圖 4-2-4 第二組、Ⅰ-135 固定,Ⅱ-46 轉置 依 4-2-2 節所述,若共軛固定點過於集中ㄧ區域內,無論是Ⅰ區 或Ⅱ區固定或轉置,其點雲套合精度皆發生套合誤差過大的問題,故 本節是以短距離控制,長距離套合的方式,但將Ⅰ區的 2 號點轉換成 5 號點固定,以此模擬在長短距離下共軛球與反射標之精度差異分析。 由表 4-20 可知,Target 在 I135 固定Ⅱ46 轉置點雲座標的情況 下,所獲得的 RMS 指標,在 X 軸向和 Y 軸向的精度約 0.5 公厘~5 公 厘,Z 軸向的精度在 50 公尺處,則達到約 3.6 公分。 由圖 4-20 可知,Target 在 I135 固定Ⅱ46 轉置點雲座標的情況