1
將雷射點雲資料三維網格
將雷射點雲資料三維網格
化以分面之研究
化以分面之研究
指導教授:趙鍵哲 老師
學生:黃國彥
綱要
.前言
.原理
.實例
.結果討論
﹒後續目標
3
一﹒前言
.光達點雲資料的特性
充份表達地貌、龐大的點數、散佈的光達點
.三維網格的特性
明確的位相關係、分區明顯
.光達點雲資料結合三維網格的特性
以三維網格管理雜亂且密集的點雲
二﹒理論
.光達點雲三維網格結構化
切割的依據、停止切割的條件
.以三維網格結構分面
8
.光達點雲三維網格結構化
.切割的依據
決定切割次數、子網格範圍
.停止切割的條件
以子網格所包含光達點之數目決定
.子網格提供的資訊
子網格間的位相關係、光達點的資訊
.子網格提供的資訊
( 1﹐1﹐1 ) ( 1﹐2﹐1 ) ( 2﹐1﹐1 ) ( 2﹐2﹐1 ) ( 1﹐1﹐2 ) ( 1﹐2﹐2 ) ( 2﹐1﹐2 ) ( 2﹐2﹐2 ) 圖 4 子網格示意圖10
.光達點雲三維網格結構化流程圖
定義切割次數 讀取光達點雲資料 開始切割 Yes No 是否達切割停止條件? 停止切割 圖 5 三維網格結構化流程圖.以三維網格結構分面
.定義目標網格
至少需含有一個或以上的光達點
.定義搜尋網格及搜尋方法
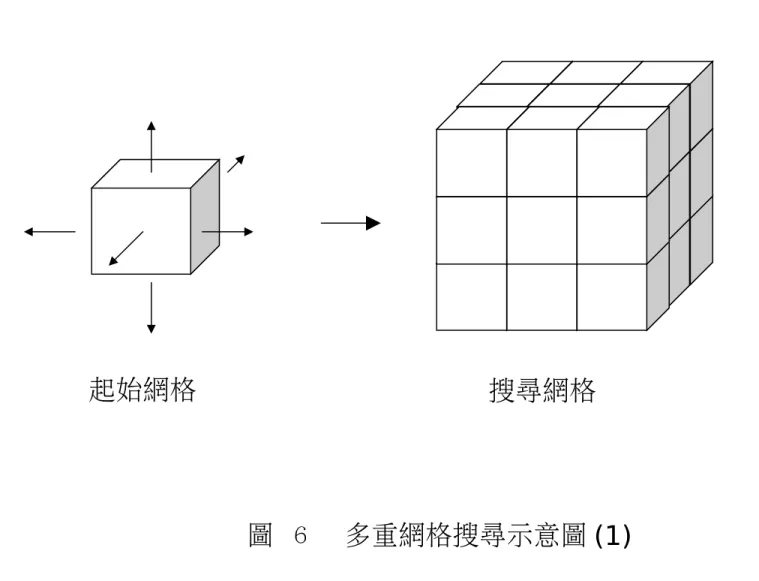
– 多重網格搜尋
– 單一網格搜尋
12
.多重網格搜尋
起始網格 搜尋網格
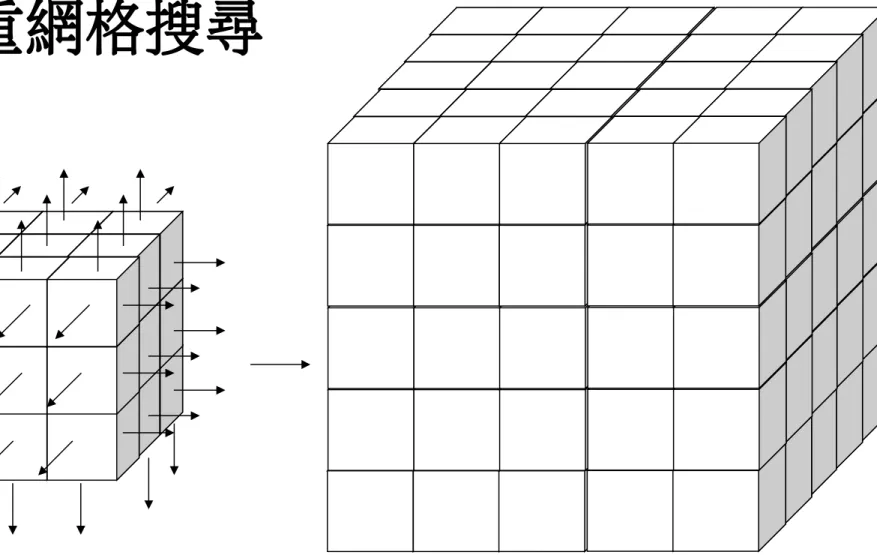
.多重網格搜尋
起始網格 搜尋網格
14
.多重網格搜尋流程圖
定義起始網格 讀取光達點雲與網格資料 定義搜尋網格範圍 No Yes 光達點至面的距離是 否皆在門檻值內? 單一網格搜尋 圖 8 多重網格搜尋流程圖 面擬合 下一次的起始網格範圍 變更為此次的搜尋網格 判斷為共面點.單一網格搜尋
起始網格 搜尋網格
16
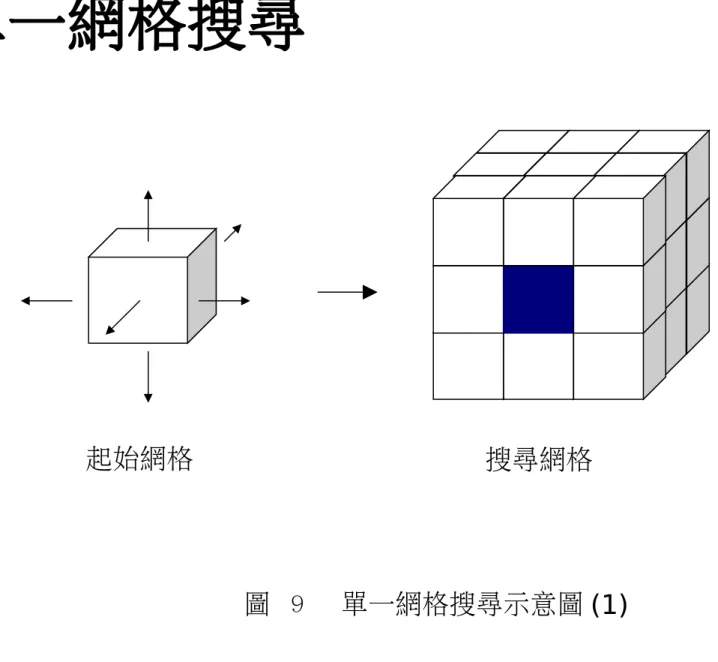
.單一網格搜尋
起始網格 搜尋網格
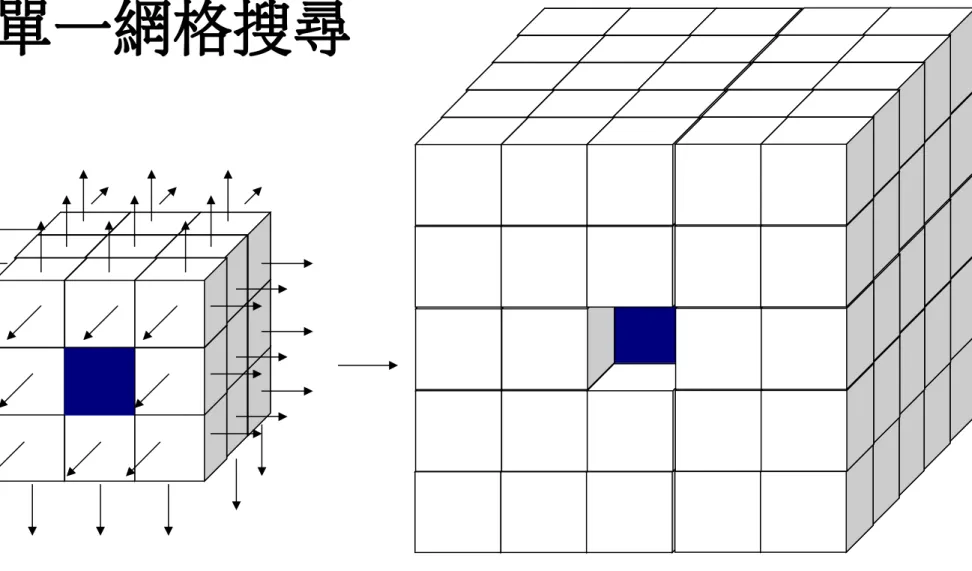
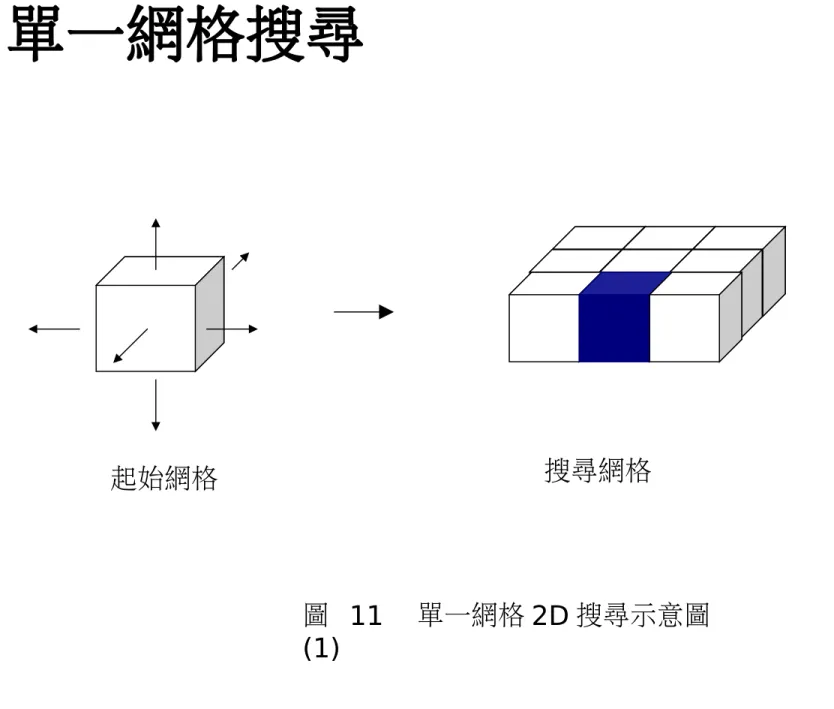
.單一網格搜尋
起始網格 搜尋網格
圖 11 單一網格 2D 搜尋示意圖 (1)
18
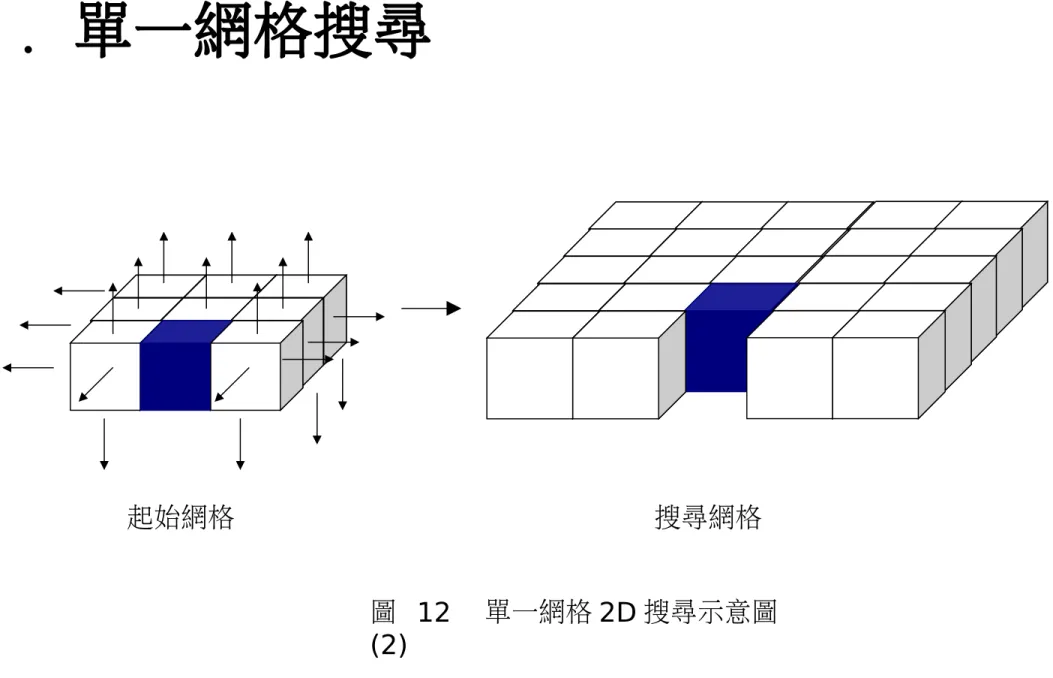
.單一網格搜尋
起始網格 搜尋網格
圖 12 單一網格 2D 搜尋示意圖 (2)
19
.單一網格搜尋流程圖
Yes 圖 13 單一網格搜尋流程圖 定義搜尋網格範圍 繼承多重網格搜尋時最終的起始網格 面擬合 分面完成 No 是否存有仍可分面之點? Yes 定義起始網格 No 光達點至面的距離是否皆在門檻值內? 判斷為 共面點 Yes 是否仍有搜尋網格需處理? No20
三﹒實例
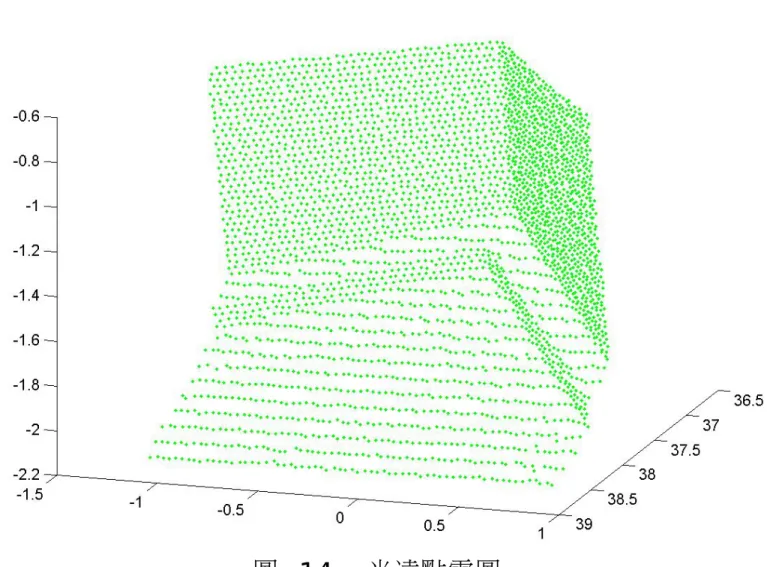
.實驗資料為成功大學圖書館側面的近景影像及地
面光達資料,所使用之地面雷射掃描儀為加拿大
Optech 公司所生產之 ILRIS-3D( 劉燈烈, 2004)
光達資料點數
3306
定位精度 網格密度 光達點先驗中誤差mm
mm 12
~
8
cm
cm 3
3
) 008 . 0 , 008 . 0 , 008 . 0 ( m m m 表 1 雷射掃瞄儀資料與光達資料點數.點雲與網格資料
表 3 光達點雲與網格座標資料 X Y Z 子網格間距 (m) 0.063 0.064 0.048 光達座標最大值 (m) 0.843 38.594 -0.646 光達座標最小值 (m) -1.188 36.532 -2.189 網格切割數 5 有點之子網格數 1762 子網格最大點數 5 表 2 三維網格資 料22
.原始資料
23
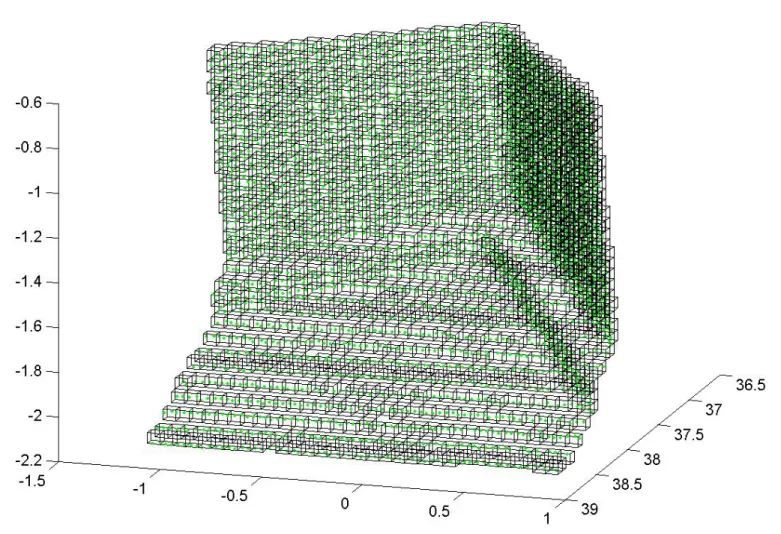
.三維網格切割
圖 15 光達點雲三維結構化後成 果
24
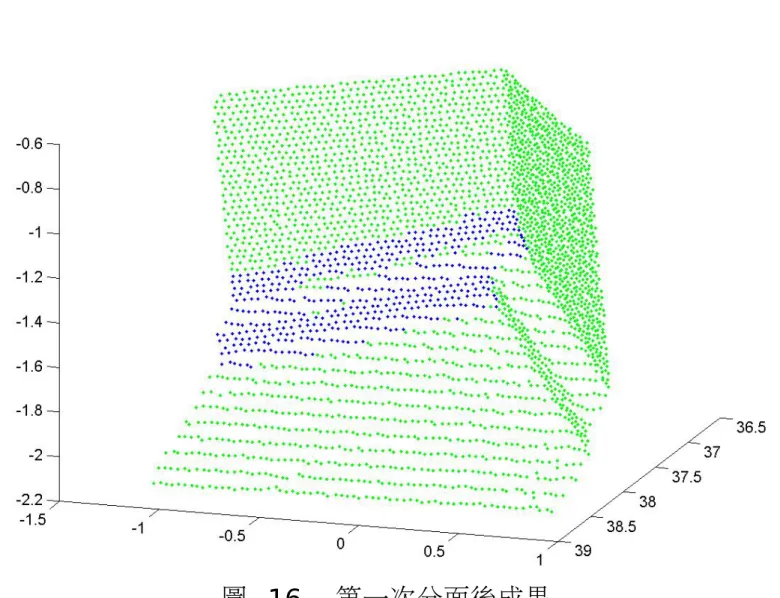
.開始分面
(1)
.開始分面
(2)
26
.開始分面
(3)
.開始分面
(4)
28
.開始分面
(5)
.分面成果
表 3 面法向量及其精度 法向量 平面一 平面二 平面三 平面四 平面五 -0.01384 0.03063 0.04062 -0.01919 -0.00104 -0.02818 -0.02804 -0.02707 -0.02707 -0.03225 -0.02218 -0.02068 0.00723 0.00795 -0.11113 法向量精度 平面一 平面二 平面三 平面四 平面五 3.343 2.595 4.444 6.226 9.459 4.297 2.846 3.225 1.046 8.153 2.524
10
6 1.437 3.037 1.072 2.873
10
8 1010
1110
a
b
c
a
b
c
810
1010
710
910
610
910
1210
910
10
9 1010
1210
30
四﹒
結果討論
(1)
四﹒
結果討論
(2)
32
四﹒
結果討論
(3)
五﹒
後續目標
.解決效率問題
.使搜尋網格確立邏輯更加完善
.是否可在分面前以其他方法找出存有
兩個面以上的網格
34