國
立
交
通
大
學
電機與控制工程學系
碩
士
論
文
自主分散式救援機器人與其合作策略之實現
Design and Realization of the Cooperative Strategy on
Autonomous Distributed Rescue Robots
研 究 生:施子強
指導教授:徐保羅 博士
自主分散式救援機器人與其合作策略之實現
Design and Realization of the Cooperative Strategy on
Autonomous Distributed Rescue Robots
研 究 生:施子強
Student:Tzu-Chiang Shih
指導教授:徐保羅 教授
Advisor:Dr. Pau-Lo Hsu
國 立 交 通 大 學
電機與控制工程學系
碩 士 論 文
A Thesis
Submitted to Department of Electrical and Control Engineering College of Electrical and Computer Engineering
National Chiao-Tung University in Partial Fulfillment of the Requirements
for the Degree of Master in
Electrical and Control Engineering July 2009
Hsinchu, Taiwan, Republic of China
自主分散式救援機器人與其合作策略之實現
研究生:施子強 指導教授:徐保羅 博士
國立交通大學電機與控制工程學系
摘要
自主式救援機器人主要目的在於進行搜救任務,相較於傳統的搜救機 器人,不需透過操作員的搖控,透過機器人本身對於環境的認知,就可以 自主執行搜救的任務,同時經由無線網路,使監控端可以隨時觀測機器人 的狀態。在機器人的行為控制方面,透過感測器對環境的感測,而設計個 別行為,經由比較優先權的機制來產生最後的行為輸出,而無線網路方 面,建立ZigBee 網狀拓撲網路,結合遠端電腦的人機介面,達到網路化監 控的功能。 本論文分別依照機器人對環境的認知來設計合作搜尋策略,在已知環 境方面,設計虛擬區域劃分策略,由合作策略產生群體行為,機器人自主 能力的個別行為,結合ZigBee 無線通訊,設計基於行為模式之多機器人合 作搜尋架構,經由實驗結果,合作策略的使用將提升整體搜尋效率38%。 在未知環境方面,另外設計動態區域劃分策略,經由實驗結果,合作 策略的使用將提升整體搜尋效率30%。Design and Realization of the Cooperative Strategy on
Autonomous Distributed Rescue Robots
Student:Tzu-Chiang Shih Advisor:Dr. Pau-Lo Hsu Department of Electrical and Control Engineering
National Chiao-Tung University
ABSTRACT
The proposed autonomous rescue robot transmits information of its environment within a certain disaster area through the wireless network including the image and voice communication. Furthermore, they may also achieve the mission to bring materials to the victim. Therefore, a critical issue of the rescue robot is how they cooperate to search for victim more efficiently and effectively. In this thesis, the behavior-based motion cooperation is proposed for both the single robot and the multiple robots, separately. Then, the mesh topology network is adopted with the ZigBee wireless system and their integration can be further applied to the resultant final behavior output based on the assigned priority.
With both known and unknown environments, different behavior-based cooperative search strategies are also proposed for the multiple rescue robots. For the known environment, the strategy with virtually dividing approach is adopted and the group behavior is determined by both the cooperative strategy and the individually autonomy behavior. With the ZigBee communication, the framework of the behavior-based multi-robot cooperation is achieved and experimental results indicate that the searching efficiency is reliably improved 38%. For the unknown environment, the dynamic area dividing strategy is proposed and experimental results indicate that the searching efficiency is also improved 30%.
誌 謝
首先要感謝我的指導教授徐保羅老師兩年來對我的指導,讓我在研究上遇到 瓶頸時,能夠適時地找到正確的出路,使得本論文能夠順利地完成。同時也要感 謝口試委員翁慶昌老師、葉賜旭老師與李俊賢博士於本論文的建議與指導,讓本 論文能夠更加的完善。 感謝實驗室的學長、同學與學弟們:李俊賢學長、謝鎮洲學長、幸琮政學長、 黃煒生學長、賴建良學長、王安平學長、黃宗勝學長、李建龍學長、林也強學長、 劉醇偉學長、哲維、孟哲、士文、子期、旻慶,在我的學業與研究中,互相勉勵, 讓我能夠在遇到困境時,給予我意見,並且在做實驗時,給予我幫助,讓我能夠 順利完成本論文。另外特別感謝煒智、任斌、正忠,在我的研究所生活中,帶給 我歡樂,讓我能保持愉悅的心情來面對挑戰。 最後要感謝我的父母與兄弟們,長久以來在我生活上的支持,讓我能夠無後 顧之憂、專心地讀書以及做研究,使我能夠順利完成碩士學位。目 錄
中文摘要
...i
英文摘要
... ii
誌謝... iii
目錄... iv
表目錄... viii
圖目錄... ix
第一章 緒論 ...1
1.1 研究動機與目的 ...1
1.2 研究背景與發展現況 ...2
1.3 問題陳述 ...3
1.4 研究方法與步驟 ...4
1.5 論文架構 ...5
第二章 機器人硬體與系統架構 ...6
2.1 機器人平台運動模型...6
2.2 機器人平台硬體...7
2.2.1 系統架構...7
2.2.2 eZdsp
TMF2812 DSK之功能介紹...9
2.2.3 SCI串列傳輸 ...10
2.2.4 DAC介面 ...11
2.2.5 Encoder介面 ...13
2.2.6 馬達驅動器...16
2.2.7 Power電路介面 ...17
2.3 感測器硬體...18
2.3.1 雷射掃描器...18
2.3.2 超音波感測器...22
2.3.3 電子羅盤...25
2.3.4 紅外線攝影機...26
2.4 感測器於機器人平台上之應用 ...26
2.4.1 雷射掃描器之避障...26
2.4.2 超音波感測器之避障...29
第三章 ZigBee無線通訊...30
3.1 IEEE802.15.4 概述...30
3.2 ZigBee...32
3.3 ZigBee硬體...33
3.4 機器人無線通訊...34
3.4.1 ZigBee網路的形成...34
3.4.2 多機器人間無線通訊封包協定...37
3.4.3 ZigBee與Wi-Fi ...40
第四章 多機器人合作策略與行為控制架構 ...41
4.1 團體合作方式分類...41
4.2 基於行為模式之機器人控制理論 ...42
4.3 已知環境合作搜尋策略 ...44
4.3.1 群體行為設計...49
4.3.2 個別行為設計...51
4.3.3 整合群體行為與個別行為之合作搜尋架構 ...53
4.4 未知環境合作搜尋策略 ...55
4.4.1 群體行為設計...57
4.4.2 個別行為設計...59
4.4.3 整合群體行為與個別行為之合作搜尋架構 ...59
4.5 策略架構特色及優點...61
第五章 模擬與實驗結果 ...63
5.1 已知環境策略...64
5.1.1 已知環境模擬A...64
5.1.2 已知環境模擬B ...66
5.1.3 已知環境模擬C ...69
5.2 未知環境策略...72
5.2.1 未知環境模擬A...72
5.2.2 未知環境模擬B ...74
5.2.3 未知環境模擬C ...77
5.3 模擬結果討論...80
5.3.1 已知環境策略...80
5.3.2 未知環境策略...81
5.4 小結...81
5.5 實驗結果...82
5.5.1 實驗場地說明與描述...82
5.5.2 無合作策略實驗結果...82
5.5.3 已知環境策略實驗結果...83
5.5.4 未知環境策略實驗結果...87
第六章 結論與未來發展 ...92
6.1 結論...92
6.2 未來發展...93
參考文獻
...94
表 目 錄
表 2-1 雷射規格說明 ...19 表 3-1 訊息定義代碼 ...38 表 3-2 遙控動作命令代碼 ...38 表 3-3 遙控回傳資料命令代碼 ...39 表 5-1 策略比較之模擬時間紀錄 ...65 表 5-2 模擬場地A-1 之平均時間紀錄...67 表 5-3 模擬場地A-2 之平均時間紀錄...68 表 5-4 模擬場地A-3 之平均時間紀錄...69 表 5-5 暫存座標點數之平均時間紀錄(350cm X 350cm)...73 表 5-6 暫存座標點數之平均時間紀錄(500cm X 500cm)...74 表 5-7 模擬場地B-1 之平均時間紀錄 ...76 表 5-8 模擬場地B-2 之平均時間紀錄 ...76 表 5-9 模擬場地B-3 之平均時間紀錄 ...77 表 5-10 無合作策略實驗紀錄 ...83 表 5-11 有合作策略實驗紀錄(已知環境)...84 表 5-12 平均時間實驗紀錄(已知環境) ...86 表 5-13 有合作策略實驗紀錄(未知環境) ...88 表 5-14 平均時間實驗紀錄(未知環境) ...89圖 目 錄
圖 2-1 機器人運動模型 ...6 圖 2-2 硬體平台(第一代機器人) ...7 圖 2-3 硬體平台(左邊、中間:第三代機器人,右邊:第二代機器人) ...8 圖 2-4 第二代機器人系統架構 ...8 圖 2-5 第三代機器人系統架構 ...8 圖 2-6 eZdsp 2812 ...9 圖 2-7 MAX3232 周邊電路...11 圖 2-8 MAX3232 電路模組...11 圖 2-9 DAC 7625 內部功能方塊圖...12 圖 2-10 四軸DAC介面電路...13 圖 2-11 QEP訊號示意圖...13 圖 2-12 四軸encoder介面電路...14 圖 2-13 馬達驅動電路板正面 ...15 圖 2-14 馬達驅動電路板背面 ...15 圖 2-15 馬達驅動電路板與DSP 2812 結合 ...15 圖 2-16 全橋式MOSFET ...16 圖 2-17 馬達驅動器介面電路 ...16 圖 2-18 馬達驅動器 ...17 圖 2-19 POWER介面電路 ...17 圖 2-20 POWER電路實體模組 ...18 圖 2-21 URG-04L ...18 圖 2-22 LMS URG-04LX 掃描範圍...20 圖 2-23 雷射感測值編碼 ...20 圖 2-24 雷射距離量測 ...21 圖 2-25 180 度全徑掃瞄 ...21 圖 2-26 180 度掃描(環境一) ...21 圖 2-27 180 度掃描(環境二) ...21 圖 2-28 雷射配置圖 ...21 圖 2-29 MaxSonar-EZ1 模組 ...22 圖 2-30 單晶片 8051 模組 ...23 圖 2-31 SN74LVTH245ADW ...23 圖 2-32 波音波配置圖 ...23 圖 2-33 原始超音波值(100cm)...24 圖 2-34 濾波後超音波值(100cm)...24圖 2-35 sonar不同距離量測...25
圖 2-36 2-Axis Compass Module(V2Xe) ...25
圖 2-37 紅外線攝影機 ...26 圖 2-38 雷射掃瞄人機介面 ...27 圖 2-39 雷射分區圖 ...28 圖 2-40 雷射避障流程 ...28 圖 2-41 laser scan(前方沒有障礙物)...29 圖 2-42 laser scan(右方有障礙物)...29 圖 2-43 laser scan(左方有障礙物)...29 圖 2-44 laser scan(前方及左右方有障礙物)...29 圖 3-1 IEEE 802.15.4 操作頻帶示意圖...30 圖 3-2 同步模式(Beacon Mode)資料傳送行為...31 圖 3-3 非同步模式(Non-Beacon Mode)資料傳送行為...31 圖 3-4 ZigBee網路拓撲架構 ...33 圖 3-5 Chipcon CC2430 ...33 圖 3-6 CC2430ZDK...33 圖 3-7 SmartRF04EB板...34 圖 3-8 CC2430DB板 ...34 圖 3-9 ZigBee網路位址分配 ...36 圖 3-10 多機器人無線通訊 ...36 圖 3-11 人機介面 ...37 圖 3-12 遙控動作命令訊息 ...38 圖 3-13 遙控回傳資料命令訊息 ...39 圖 3-14 機器人間訊息 ...39 圖 3-15 IEEE 802.15.4 和IEEE 802.11 頻道相互重疊圖...40 圖 4-1 Subsumption Architecture ...43 圖 4-2 Schema-based Architecture ...43 圖 4-3 機器人個人區域 ...45 圖 4-4 個人區域策略示意圖 ...46 圖 4-5 350cm X 350cm場地...48 圖 4-6 350cm X 350cm場地(虛擬劃分)...48 圖 4-7 虛擬區域劃分策略示意圖 ...49 圖 4-8 inter-robot avoidance行為示意圖...50 圖 4-9 robot wander行為示意圖 ...51 圖 4-10 目標物 ...52 圖 4-11 雷射避障示意圖 ...52 圖 4-12 超音波避障示意圖 ...52 圖 4-13 基於行為模式之多機器人合作搜尋架構(虛擬區域劃分策略) ...54
圖 4-14 行為選擇範例(虛擬區域劃分策略) ...55
圖 4-15 行為選擇範例說明(虛擬區域劃分策略) ...55
圖 4-16 動態區域劃分策略 ...56
圖 4-17 dynamic robot wander行為示意圖 ...58
圖 4-18 dynamic inter-robot avoidance行為示意圖 ...58
圖 4-19 基於行為模式之多機器人合作搜尋架構(動態區域劃分策略) ...60 圖 4-20 行為選擇範例(動態區域劃分策略) ...61 圖 4-21 行為選擇範例說明(動態區域劃分策略) ...61 圖 5-1 BCB模擬介面 ...63 圖 5-2 模擬場地 1 ...64 圖 5-3 模擬場地A-1...64 圖 5-4 個人區域策略和虛擬區域劃分策略模擬比較 ...65 圖 5-5 模擬場地A-2...66 圖 5-6 模擬場地A-3...66 圖 5-7 模擬場地A-1 之模擬結果...67 圖 5-8 模擬場地A-2 之模擬結果...68 圖 5-9 模擬場地A-3 之模擬結果...69 圖 5-10 3 robots 搜尋目標物軌跡圖(已知環境)...70 圖 5-11 Robot-1 行為狀態輸出(已知環境)...71 圖 5-12 Robot-2 行為狀態輸出(已知環境) ...71 圖 5-13 Robot-3 行為狀態輸出(已知環境) ...71 圖 5-14 模擬場地B-1 ...72 圖 5-15 暫存座標點數分析(350cm X 350cm)...73 圖 5-16 暫存座標點數分析(500cm X 500cm) ...74 圖 5-17 模擬場地B-2 ...75 圖 5-18 模擬場地B-3 ...75 圖 5-19 模擬場地B-1 之模擬結果 ...75 圖 5-20 模擬場地B-2 之模擬結果 ...76 圖 5-21 模擬場地B-3 之模擬結果 ...77 圖 5-22 3 robots 搜尋目標物軌跡圖(未知環境)...78 圖 5-23 Robot-1 行為狀態輸出(未知環境) ...79 圖 5-24 Robot-2 行為狀態輸出(未知環境) ...79 圖 5-25 Robot-3 行為狀態輸出(未知環境) ...79 圖 5-26 實驗場地 ...82 圖 5-27 無合作策略實驗結果 ...83 圖 5-28 有合作策略實驗結果(已知環境) ...84 圖 5-29 比較時間變異量(已知環境) ...85 圖 5-30 比較平均時間(已知環境)...85
圖 5-31 三台機器人之合作搜尋(虛擬區域劃分策略) ...87
圖 5-32 有合作策略實驗結果(未知環境) ...87
圖 5-33 比較時間變異量(未知環境) ...89
圖 5-34 比較平均時間(未知環境)...89
第一章 緒論
11.1 研究動機與目的
相較於單一機器人系統,多機器人系統可藉由團體的合作協調能力,來補足 單一機器人系統的缺點,例如擁有更多的錯誤容忍率、更多的彈性、更簡單的機 器人設計及更好的性能展示等,所以多機器人系統的研究越來越受重視。 目前有許多與多機器人相關的研究主題,例如多機器人合作定位[1]、多機 器人環境探索[2][3]、多機器人合作搬運[4]、多機器人足球[5]、多機器人清潔[6] 等,以上相關任務需求都必須依靠多機器人間的協調合作來完成。 而近年來,多機器人系統也陸續被應用在執行危險的任務,其中以災區搜救 應用最為廣泛,讓機器人團隊深入災區,在人類或大型器械無法進入的斷垣殘壁 裡進行搜索的工作,特別一提的是,著名的日本機器人聯盟RoBoCup每年定期會 舉辦各式不一樣的機器人競賽,其中還特別分出一個RoBoCup Rescue的比賽, 其中包括真實現場的搜救,提供一個類似災難現場的環境,各參賽團隊使用自己 所設計的機器人平台來執行救援任務,透過比賽將可考驗機器人合作的能力、機 器人的環境感測能力、機器人定位能力、機器人機構設計能力等,其中最重要的 就是多機器人合作部份,由於搜尋環境範圍很大以及環境中障礙物相當複雜,所 以單一機器人並不能勝任,必須透過多機器人合作協調才能完成任務,這也是比 賽最終的目的,期望各團隊往多機器人系統以及機器人自主去發展。 以上所介紹的皆仰賴多機器人間的互助合作來完成,因此只要機器人本身自 主行為的選擇以及合作策略有良好的設計的話,
不需要功能複雜的單一機器人, 只要搭配一些配備單純且動作靈活的機器人,即可達成上述的實用功能,因此基 於行為選擇以及合作策略的多機器人自主系統將有相當不錯的功能,這促使了本 論文之研究動機。1.2 研究背景與發展現況
有關多機器人合作應用在分散式機器人上,目前已經有相當多的研究成果, 其中與救援機器人相關的主題乃屬於環境探索和搜尋,而近年來,在環境探索或 搜尋研究領域中,主要區分為單機器人環境探索[7][8],以及多機器人環境探索, 並且分別針對已知環境和未知環境來做探討,其中透過多機器人間的合作搜尋最 為大家所探討。有關利用群組機器人來對地形做探索[9]-[11],主要解決機器人 在探索中所產生的定位累積誤差問題,首先把環境區分為許多條狀,再透過機器 人本身的感測,當其中一台機器人移動時,另一台機器人則保持靜止狀態並且觀 察移動中的機器人,利用此關係來降低所造成的累積誤差問題以及執行探索任 務,但缺點為各機器人間必須非常靠近彼此,如此才能透過視覺來感測對方。 在多機器人合作探索方面,Kong et al.[12]利用所設計的搜尋演算法,使群 組式自主機器人在未知環境中隨機搜尋目標物,採用基於行為模式之控制方式, 演算法由五個自行設計的行為組成,其中包含合作部份的行為以及機器人自主行 為,透過此演算法使五台機器人在未知環境中做搜尋目標物的任務,缺點是並沒 有 去 探 討 和 比 較 所 設 計 的 演 算 法 其 改 善 搜 尋 效 率 的 程 度 。Anderson and Papanikolopoulos [13]也是解決在未知環境中搜尋,並且有加入地圖建立的功能, 同樣利用基於行為模式之控制方式來設計搜尋演算法。 目前也有許多研究專注於多機器人合作架構的設計,Grabowski et al.[14]考 慮到單一機器人在感測的距離限制,因此利用領導者的架構來統整所有機器人的 感測資訊,然後再分別引導其他機器人做閃避障礙物的動作和前往未搜尋過的區 域。Jung and Zelinsky [15]設計基於行為模式之分散式行為控制架構,成功應用 在多機器人合作清潔的任務。而搜救機器人在遠端監控也扮演相當重要的角色[16],機器人採取基於行為 模式之控制方式達到自主搜尋的動作,同時回傳感測資訊和狀態給遠端監控人 員,遇到特殊狀況時,則切換成操控者搖控,由實驗結果分析,利用人類半輔助
式的機器人自主搜尋也可以提高整體的搜尋效率。
1.3 問題陳述
1、機器人自主能力以及行為控制問題
有別於遙控機器人,沒有使用者來對機器人下達控制命令,機器人本身必須 透過對環境的感測做出適當的行為動作,所以自主能力的好壞,決定於行為控制 架構的設計以及感測器的應用,同時基於監控機器人的需要,在多機器人系統中 必須依賴無線網路,回傳目前各機器人的狀態、感測資訊以及提供機器人之間的 溝通,因此本論文第一部分的研究重點在於: (1) 機器人自主行為能力的建立。 (2) 多機器人無線網路架構的設計。2、合作策略與行為控制整合於目標物搜尋
單一機器人具備了自主能力後,將可以執行簡單的任務,但是當所要執行的 任務比較複雜時,則必須透過多機器人來完成,以搜救機器人為例,機器人在複 雜環境中找尋生還者,搜尋時間要越快越好,所以機器人間的合作協調將非常重 要,必須透過完整的合作策略設計,使多機器人在搜尋過程中能夠互相資源分 享,而主要目的是讓機器人可以有效的分散在環境中,最後使整體的搜尋效率提 升,由以上的描述,本論文下一步探討的研究在於: (1) 如何設計合作策略來應付不一樣的搜尋環境,包含已知環境和未知環境。 (2) 所設計的合作策略如何轉換成相對應的行為優先權控制架構,最後實現在多 機器人搜尋目標物任務。1.4 研究方法與步驟
1、機器人自主能力以及行為控制問題
(1) 首 先 需 建 立 硬 體 電 路 以 及 感 測 電 路 , 以 數 位 訊 號 處 理 器 (digital signal processor,DSP)為控制核心,感測電路方面透過單晶片 8051、影像處理板和 筆記型電腦接收感測值,最後提供給DSP 上的決策系統作為判斷依據,機器 人無線通訊方面,以ZigBee 網路為基礎,建立網狀拓撲網路,配合遠端電腦 的人機介面,達到遠端監控的功能。 (2) 機器人的行為控制上採用基於行為模式的控制方法,透過環境感測產生不一 樣的個別行為,最後使用優先權的比較機制,決定最後所要輸出的行為,讓 機器人可以達到自主的功能。2、合作策略與行為控制整合於目標物搜尋
(1) 依造對環境的認知來設計合作搜尋的策略,分別為已知環境和未知環境,已 知環境方面,因為事先可以得知環境大小,所以設計虛擬區域劃分策略,對 所要搜尋的區域先做虛擬劃分,機器人互相交換此資訊,最終目的使機器人 可以分散在環境中搜尋。 (2) 未知環境方面,因為沒有環境資訊,所以另外設計動態區域劃分策略,透過 短暫的座標記憶,再換算成單獨個別小區域,機器人互相交換此資訊,最終 目的使機器人可以分散在環境中搜尋,。 (3) 透過合作策略的設計產生群體行為,而機器人自主方面產生個別行為,不同 類型的行為最後透過比較優先權的機制來決定最後行為的輸出,另外結合 ZigBee 無線網路,設計基於行為模式之多機器人合作搜尋架構,讓多機器人 可以透過此架構的運作,執行搜尋目標物的任務,並且改善搜尋效率。1.5 論文架構
本論文共分為六章,第一章旨在簡述研究動機、目的、背景與發展,並陳述 所要研究的問題、方法、步驟。第二章介紹機器人平台,並說明整體系統架構, 包含使用的硬體元件規格、感測器元件、連接方式,以及感測器應用於機器人平 台。第三章描述ZigBee無線網路,並且說明如何應用到機器人系統上。第四章說 明合作策略以及行為控制的結合,分別依照已知環境和未知環境做策略設計,最 後建構基於行為模式之多機器人合作搜尋架構。第五章為模擬和實驗結果,首先 模擬第四章所設計的合作策略,分別透過不一樣的模擬場地來應證策略使用的可 行性,最後透過實驗,把策略實現在機器人平台上,由實驗結果分析有、無使用 合作策略對搜尋效率的影響。第六章對本論文做一個結論,並提出未來可以再發 展之方向。第二章 機器人硬體與系統架構
22.1 機器人平台運動模型
機器人平台為履帶式機器人,左、右兩邊各由一顆馬達帶動履帶,其平台運 動模型如圖 2-1所示。θ
w X w Y 圖 2-1 機器人運動模型 機器人運動模型中的參數定義如下: wX
、Y
w: 世界座標(world coordinate)X、Y x、y: 平台座標(mobile coordinate) X、Yθ:機器人移動方向與X軸之夾角
V
t: 機器人移動速度
W
:機器人旋轉角速度參考[17],機器人的運動方程式(kinematics equation)如下式(2-1),利用此運 動方程式轉換成平台座標。
cos
0
sin
0
0
1
tx
v
y
w
θ
θ
θ
⎡ ⎤
⎢ ⎥ ⎡
⎤
⎢ ⎥
⎢
⎥
⎡ ⎤
=
⎢ ⎥
⎢
⎥ ⎣ ⎦
⎢ ⎥
⎢ ⎥ ⎢
⎣
⎥
⎦
⎢ ⎥
⎣ ⎦
i i i(2-1) 因為機器人平台只依靠左、右兩輪來帶動履帶運轉,所以在輪軸的方向是沒 有速度的,因此運動模型必須受到非全向性(nonholonomic)限制:
(2-2)
sin
cos
0
x
θ
−
y
θ
i i=
2.2 機器人平台硬體
2.2.1 系統架構
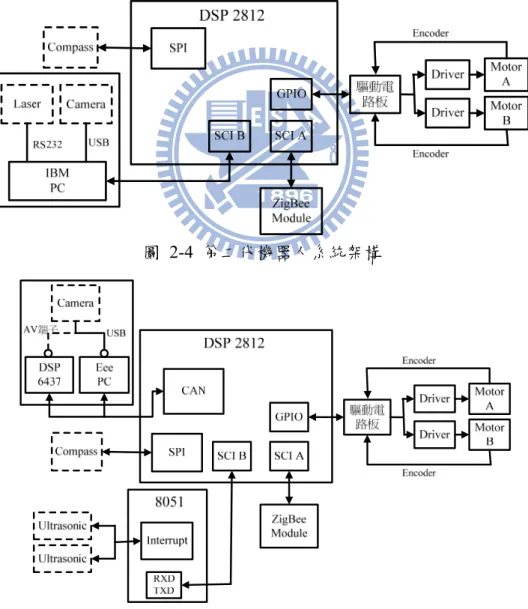
本論文所使用的機器人平台如圖 2-2、圖 2-3所示,第一代機器人以壓克力 為主要結構,為機器人平台的最初設計,第二代機器人為改進第一代機器人結構 所設計,第三代機器人為改進體積和履帶傳動的問題所設計,本論文在硬體平台 上將使用第二、三代機器人(圖 2-3),各平台的系統架構如圖 2-4、圖 2-5所示, 兩種機器人平台各搭配其適合的感測器,接下來將分別就硬體平台的不同,說明 其系統運作。 圖 2-2 硬體平台(第一代機器人)圖 2-3 硬體平台(左邊、中間:第三代機器人,右邊:第二代機器人)
圖 2-4 第二代機器人系統架構
z 第二代機器人 體積寬度足以放置筆記型電腦,攝影機透過 USB 介面連接到筆記型電腦做 目標物顏色的辨識,而雷射掃瞄器則是透過 RS232 的介面連接到筆記型電腦做 環境偵測的資料收集,透過筆記型電腦上的人機介面來做行為決策,再透過 RS232 介面與底層 DSP 控制板來溝通,同時電子羅盤透過 SPI 介面連接到 DSP 控制板做角度的判別偵測,馬達控制方面以電壓訊號命令來控制馬達的轉速,此 外ZigBee 模組也透過 RS232 介面連接到 DSP。 z 第三代機器人 體積更為縮小,影像視覺配置上分為兩種,一種是使用攝影機透過 USB 介 面連接到Eee PC,另外一種則是使用 DSP6437 影像處理板連接攝影機,兩者都 是用來做目標物顏色的辨識,而超音波則是先透過8051 模組做距離偵測的前處 理,再透過RS232 介面連接到 DSP 控制板,電子羅盤透過 SPI 介面連接到 DSP 控制板做角度的判別偵測,馬達控制方面一樣以電壓訊號命令來控制馬達的轉 速,此外ZigBee 模組也透過 RS232 介面連接到 DSP。
2.2.2 eZdsp
TMF2812 DSK 之功能介紹
本論文採用德州儀器(Texas Instrument,TI)公司所研發的TMS320 F2812 DSP(簡稱F2812)作為控制核心,如圖 2-6所示。 圖 2-6 eZdsp 2812德州儀器公司所生產的DSP中,’C2000系列的硬體發展平台是專為控制應用 最佳化而設計的,其中F2812晶片是此系列中目前最高等級的控制器,其特點在 於擁有150 MHz(6.67 ns cycle time)的快速處理能力,比TI早期出產的DSP ‘C240 快7倍。在核心部分,算數邏輯單元(ALU)、累積器(ACC)均採用32位元定點運算, 為了提升數位訊號運算效能,以硬體方式實現乘法器、乘積位移器,可在一個指 令週期(instruction cycle)內完成乘加運算。在整數計算方面,為減少數值計算所 衍生如溢位(overflow)等問題,也採用硬體式的輸出倍率位移器來提高軟體執行 的精確度。
記憶體容量方面,F2812(on chip)主要擁有128K*16 Flash EEPROM、兩組 4K*16 Single-Access RAM(SARAM)、一組8K*16 SARAM,並採用哈佛匯流排 (Harvard bus)架構。較舊型的DSP大部分將程式、資料、I/O記憶體獨自分離(定址 位址重複),但F2812卻走向單獨的記憶體空間,裡頭包含上述三種記憶體,使用 更為有彈性,也可減少不同記憶體之間般動資料的指令集。
Spectrum Digital 公司則利用 F2812 晶片結合自行開發之周邊模組,發展出 eZdspTM F2812 初學板(DSP Started Kit,DSK),其週邊主要有 16 個通道的 12 位元類比數位轉換器(ADC),串列傳輸支援了四種常用的型式:SPI (Serial Peripheral Interface)、SCIs (Serial Communications Interface)、eCAN (Enhanced Controller Area Network)、McBSP (Multi-channel Buffered Serial Port),最高可支 援56 個 GPIO(General-Purpose I/O)。
2.2.3 SCI 串列傳輸
串列傳輸標準是美國電子工業協會在1969年所頒佈之RS-232-C, 同時也是 目前應用最廣的串列傳輸標準。RS232串列傳輸主要是利用RXD和TXD來做資料 的接收和傳送線,由於RS232與TTL所判定的高電位和低電位的電壓值不同,所 以必須做位準轉換的介面,才可以讓資料由RS-232的電壓準位轉換為TTL的電壓 準位。本論文使用
eZdsp
TMF2812 DSK上的SCI串列傳輸來和單晶片 8051、ZigBee 模組以及電腦做資料的溝通,首先透過MAX3232 來做位準轉換,周邊電路如圖 2-7所示,而實體模組如圖 2-8所示,透過此模組將可以轉換DSP串列傳輸的 3.3V 變成TTL電壓準位。 圖 2-7 MAX3232 周邊電路 圖 2-8 MAX3232 電路模組2.2.4 DAC 介面
由於本論文所使用的馬達驅動器為全橋式MOSFET,所以控制馬達輸入驅動 器的速度命令為0V~15V的類比電壓,而eZdspTM F2812 DSK的輸出僅有數位信 號,因此需要用DAC進行轉換。在此使用Burr-Brown公司出產專用於馬達控制用 途之DAC 7625,將數位信號轉換為類比信號,圖 2-9為內部功能方塊圖。其特 色如下所示: z 可選擇單極性(unipolar)與雙極性(bipolar)運作模式 z 穩定時間約為10 us z 12位元的解析度 z 數位資料並列輸入 z 支援4通道(channel)且同步輸出圖 2-9 DAC 7625 內部功能方塊圖 利用選擇通道接腳A1、A0,依序將數位值由 DB11~DB0 寫入,四軸的數位 值會存放於各自的暫存器中,當 LDAC 控制接腳變為低電位時,才一次同時轉 換為類比訊號輸出,轉換公式如(2-3)式。 4096 )
( REFH REFL value
REFL out D V V V V = + − × (2-3) 其中
V
REFH 與V
REFL 各代表參考電壓的上下限值,設為+2.5V與 0V, 是 輸入的數位值, valueD
outV
為輸出電壓值。由於馬達驅動器操作在0V~15V之間,而DAC 7625 的VREFH僅能達到+2.5V(亦為輸出電壓上限),為此,Vout必須經過五倍以 上放大電路,才能匹配驅動器之需求。四軸DAC介面在Protel DXP裡的電路設計 如圖 2-10所示,包括DAC7625 周邊以及兩個OP放大電路。5V F2812_A00 F2812_A01 F2812_A02 F2812_A03 F2812_A04 F2812_A05 F2812_A06 F2812_A07 F2812_A08 F2812_A14 5V Vcc- 4 2OUT 7 3OUT 8 1IN+ 3 2IN-6 3IN- 9 Vcc+ 11 1IN-2 1OUT 1 2IN+ 5 3IN+ 10 4IN+ 12 4IN- 13 4OUT 14 U2 TLC2274 1K R1 Q1 LM336 0.1uFC3 5K R4 10K R5 10K R6 -15V 15V 5K R7 10K R9 10K R10 DB10 18 DB11 19 DB0 8 DB1 9 DB2 10 DB3 11 DB4 12 DB5 13 DB6 14 DB7 15 DB8 16 VREFH 1 VOUTA 3 VOUTD 26 R/W 20 VOUTB 2 VOUTC 27 CS 23 NIC 24 VDD 25 VSS 4 RESET 6 A1 21 A0 22 DB9 17 VREFL 28 GND 5 LDA 7 C U1 DAC7625 5K R11 10K R13 10K R14 -15V 15V 5K R15 1 2 3 R2 Var 25K 10uFC2 10K R18 10K R17 Vcc- 4 2OUT 7 3OUT 8 1IN+ 3 2IN-6 3IN- 9 Vcc+ 11 1IN-2 1OUT 1 2IN+ 5 3IN+4IN+ 1012 4IN- 13 4OUT 14 U3 TLC2274 0.1uFC1 F2812_A09 F2812_A10 F2812_A11 F2812_A13 F2812_A12 F2812_A00 F2812_A01 F2812_A02 F2812_A03 F2812_A04 F2812_A05 F2812_A06 F2812_A07 F2812_A08 F2812_A09 F2812_A10 F2812_A11 F2812_A12 F2812_A13 F2812_A14 VA VB VC VD 25K R16 Res1 25K R8 Res1 25K R3 Res1 * * 25K R12 Res1 圖 2-10 四軸 DAC 介面電路
2.2.5 Encoder 介面
Encoder回授由馬達內部輸出QEP訊號,A、B相位(phase)會剛好相差 90 度, 如圖 2-11所示,因此產生了四種邏輯訊號組合(00、01、11、10),除了可提升 四倍的解析度之外,也可藉由四種邏輯訊號出現的先後順序得知輪軸轉動方向 (direction)。 圖 2-11 QEP 訊號示意圖Encoder 會由 QEP 計數的 HCTL 2032(簡稱 2032)將馬達所轉動的 pulse 個數
算出,由馬達一轉的pulse 數(
E
pulse)與 2032 所計算到的計數值(K),可推算出輪2
angle pulseK
E
π
ω
=
(2-4) HCTL 2032主要特色如下: z 最高33 MHz的時脈頻率。 z 支援雙軸(Dual Axis)同時計數。 z 支援32位元上下計數。 z 高雜訊免疫性:史密特(Schmitt)觸發器、數位雜訊濾波器。 z 8位元並列式計數值輸出。 機器人平台為兩軸運動控制,故透過兩組2032 作為輪軸轉動之計數器。又 因輸出為 5V 號,必須轉換成F2812 可接受之 .3V,故銜接位準轉換器 (transceiver) LVTH 245, 訊 3 圖 2-12為四軸encoder介面在Protel DXP裡的電路設計。 D2 30 D6 20 VDD 1 D7 10 RSTy 11 RSTx 12 CHBy 13 CHBx 14 CHAx 15 CHAy 16 CHIx 17 VSS 18 EN1 2 EN2 3 D0 4 CLK 5 SEL1 6 OE 7 U/DX 8 U/DY 9 CNTCASy 24 D3 29 X/Y 32 TEST 23 CNTCASx 25 SEL2 26 CNTDECx 27 CNTDECy 28 D1 31 D5 21 D4 22 CHIy 19 U4 HCTL-2032-SC(A,C) 5V 3.3V D2 30 D6 20 VDD 1 D7 10 RSTy 11 RSTx 12 CHBy 13 CHBx 14 CHAx 15 CHAy 16 CHIx 17 VSS 18 EN1 2 EN2 3 D0 4 CLK 5 SEL1 6 OE 7 U/DX 8 U/DY 9 CNTCASy 24 D3 29 X/Y 32 TEST 23 CNTCASx 25 SEL2 26 CNTDECx 27 CNTDECy 28 D1 31 D5 21 D4 22 CHIy 19 U5 HCTL-2032-SC(B,D) 3.3V F2812_B6 F2812_B7 F2812_B8 F2812_B9 F2812_B10 5V F2812_B11 1A1 2 2Y4 3 1Y2 16 2A4 17 2A3 15 1Y3 14 2Y3 5 1A2 4 2A2 13 1Y4 12 2A1 11 GND 10 2Y1 9 1A4 8 2Y2 7 1A3 6 VCC 20 2G 191 1G 1Y1 18 U8 HD74LS244 1 2 3 4 5 6 7 8 9 RP3 R_P 1K OE 19 VCC 20 DIR 1 A1 2 A6 7 A7 8 A8 9 GND 10 B8 11 B7 12 B6 13 B5 14 A4 5 A5 6 A3 4 A2 B1 18 3 B2 17 B4 15 B3 16 U7 LVTH245A OE 19 VCC 20 DIR 1 A1 2 A6 7 A7 8 A8 9 GND 10 B8 11 B7 12 B6 13 B5 14 A4 5 A5 6 A3 4 A2 B1 18 3 B2 17 B4 15 B3 16 U6 LVTH245A 5V 1 2 3 4 5 RP1 R_P 331 1 2 3 4 5 RP2 R_P 331 5V F2812_B7 F2812_B8 F2812_B9 F2812_B10 F2812_B6 CB DB F2812_B11 AA AB CA BA BB DA F2812_XD08 F2812_XD00 F2812_XD09 F2812_XD10 F2812_XD11 F2812_XD12 F2812_XD13 F2812_XD14 F2812_XD15 F2812_XD01 F2812_XD02 F2812_XD03 F2812_XD04 F2812_XD05 F2812_XD06 F2812_XD07 0 0 1 1 2 2 3 3 osci osci 圖 2-12 四軸 encoder 介面電路 為了使前面章節2.2.4、章節2.2.5所介紹的DAC介面和Encoder介面可以廣泛 的應用在全部的機器人平台上,以及跟DSP 2812 做相連接,所以特別另外設計 一個馬達驅動電路板,整合DAC介面和Encoder介面,如圖 2-13、圖 2-14所示, 而圖 2-15為此驅動電路板與DSP 2812 相結合,DSP2812 直接插在驅動電路板的 上層腳位,即可以使用其功能,相較於多台機器人平台應用,在電路的配置上、使用上方便許多。
圖 2-13 馬達驅動電路板正面
圖 2-14 馬達驅動電路板背面
2.2.6 馬達驅動器
馬達驅動器為全橋式Power MOSFET,如圖 2-16所示,將四個MOSFET
Q1,Q2,Q3,Q4 分成兩組,分別控制兩組切換開關之動作,而輸出電壓大小可依驅 動電路板所輸入的類比電壓之大小,來決定輸出電壓有效的大小。 圖 2-16 全橋式 MOSFET 在Protel DXP的電路設計圖如圖 2-17所示,而圖 2-18為實際的馬達驅動器 實體圖。馬達驅動器在運作過程中,因為大電流持續流動,產生MOSFET會有過 熱的現象,為了解決散熱問題,特別增加風扇於電路中。 Y0 2 Y1 1 Z1 3 Z 4 VCC 16 Z0 5 EN 6 X1 13 VEE 7 GND 8 X0 12 C 9 B 10 A 11 Y 15 X 14 U2 CD4053BCN 50K R1 Res1 50K R2 Res1 12V + -1 2 3 Q1 Header 3 1 2 3 Q2 Header 3 1 2 3 Q3 Header 3 1 2 3 Q4 Header 3 15V P0 0 P1 1 H_4 motor IN OU T P0 0 P1 1 H_3 DSP 圖 2-17 馬達驅動器介面電路
圖 2-18 馬達驅動器
2.2.7 Power 電路介面
前面小節已經有介紹馬達驅動電路板以及馬達驅動器,各個電路都有不一樣 的IC以及所對應的工作電壓,為了可以提供所有不一樣的電壓供給,特別設計了 POWER電路,裡面所包含的輸出電源共包括有:5V、15V、-15V以及全部的GND, 透過一個 10A的保險絲來保護過電流的現象,而整個POWER電路由兩個獨立的 12V鋰電池提供,在Protel DXP中設計電路圖如圖 2-19所示,而實體電路如圖 2-20所示。 P0 0 P1 1 P3 3 P2 2 D2D5 D2D5 P0 0 P1 1 H_2 Driver_12V P0 0 P1 1 H_3 Motor_12V P0 0 P1 1 H_4 MotorA P0 0 P1 1 H_5 MotorB P0 0 P1 1 H_6 MotorC P0 0 P1 1 H_7 MotorD P0 0 P1 1 P2 2 P3 3 P4 4 P5 5 P6 6 P7 7 P8 8 P9 9 P10 10 P11 11 P12 12 P13 13 P14 14 P15 15 P16 16 P17 17 P18 18 P19 19 P20 20 P21 21 P22 22 P23 23 D2D15 D2D15 5.1K R1 Res1 D1 Diode 1N4003 1 2 3 4 JP2 Header 4 1 2 3 4 JP1 Header 4 5V 1 2 JP3 Relay 5V D12V 12V -15V 15V 1 1 2 2 3 3 4 4 5 5 relay relay 5V 5V Motor+ Motor+ Motor+ Motor+ Motor+ 12V relay relay 12 3 4 5 JP4 Header 5 relay 15V 5V -15V P0 0 P1 1 P2 2 P3 3 fuse fuse 1 2 JP5 Header 2 15V -15V 1 2 JP6 Header 2 1 2 3 Q1 Header 3 1 2 JP7 Header 2 1 2 JP8 Header 2 5V 5V D12V P0 0 P1 1 H_8 H_2 圖 2-19 POWER 介面電路圖 2-20 POWER 電路實體模組
2.3 感測器硬體
2.3.1 雷射掃描器
此小節簡單敘述所使用的雷射測距系統(laser measurement system, LMS),
URG-04LX,如圖 2-21所示,此雷射掃描器為日本HOKUYO公司所製造,可量 測的角度範圍最大為
24
0
°,最大量測的距離半徑為4 公尺。 圖 2-21 URG-04L 此雷射具有高精度、高分辨率、低重量、低功耗,以及不受強光影響,在黑 暗環境中依然可以工作,所以很適合用在自主導航機器人上,下表 2-1為此雷射 的規格說明書。表 2-1 雷射規格說明 z 雷射量測與編碼 雷射掃描器偵測範圍為
2
其中再把角度範圍細分為Step 44 到Step 725, 最遠可量測到的半徑為4 公尺,所以每個Step的解析度為0.36
°, 2-2240
°, 如下圖 所 示。此雷射掃描器每一個Step掃描最短可以量測 20mm,最遠可以量測 4095mm 或5600mm,在量測值的編碼上分為兩種,第一種為長度 12 bits,編碼後變成 2 個代表符號,適用於4095mm模式,另外一種為長度 18 bits,編碼後變成 3 個代 表符號,適用於5600mm模式。為了減少資料大小,每 6 bits轉換成 1 個代表符 號。如圖 2-23所示,為編碼過程的範例,每12 bits或 18 bits分成 2 到 3 個群組, 每6 bits再額外加上 30H。因此最後在解碼端,每個代表符號必須先減掉 30H後, 再把所有位元組合起來。圖 2-22 LMS URG-04LX 掃描範圍 圖 2-23 雷射感測值編碼 z 實際量測 此雷射將放置在機器人平台的正前方,因此在角度範圍的偵測上只使用 ,首先對於雷射掃描器在不同的距離(0~400cm)上先做基本的距離量 測,如
0 ~ 180
° ° 圖 2-24所示,每隔50 公分做 10 次量測,由量測結果可以發現誤差只有 1cm,僅在此雷射掃描器的精度範圍內,所以不需要再對雷射掃瞄器量測值作訊 號處理等動作,而在不同環境上也做區域量測,如下圖 2-25、圖 2-26、圖 2-27 所示。而雷射掃描器裝置在機器人平台如圖 2-28所示,紅色圓圈為雷射掃描 器,距離地上約為15cm。0 50 100 150 200 250 300 350 400 0 50 100 150 200 250 300 350 400 distance(cm) m e a s ure di s tan c e (c m ) measure data 圖 2-24 雷射距離量測 400cm 圖 2-25 180 度全徑掃瞄 圖 2-26 180 度掃描(環境一) 圖 2-27 180 度掃描(環境二) 圖 2-28 雷射配置圖
15cm
2.3.2 超音波感測器
此小節將簡單介紹所使用的超音波感測器,MaxSonar-EZ1 如圖 2-29所示,
此超音波可以檢測的範圍為 15.24 公分~6.45 公尺,超小尺寸以及超低的電流消
耗,解析度為2.54cm,當偵測物體介於 0~15.24cm,超音波只會回傳 15.24cm的
距離值,另外輸出的介面訊號,包括PWM(頻寬調變)、類比電壓、以及串列的數 位資料(serial digital output),在本論文中所使用的輸出介面為PWM,每 147us的 脈波寬度為1 inch,每49ms 週期, RX 被給入High 或Open 後, EZ1 的(PW) pin 被 設定為High, 然後送出七個 42KHz 波長。只要有物體被檢測出, PW 會變為”低”電 位, 若是一直沒有檢測到物體, PW pin 保持High 狀態持續到 37.5ms。 圖 2-29 MaxSonar-EZ1 模組 PWM(頻寬調變)的量測則透過單晶片 8051 來執行,如下圖 2-30所示。單 晶片5081 透過兩個外部中斷分別來計算所裝置的兩個超音波,每當一次量測循 環後,就透過 8051 上的RS232 介面把兩個超音波距離量測值送回給DSP,特別 的是因為單晶片8051 的輸出訊號為 5V,但是DSP控制板上的腳位運作工作電壓 為3.3V,所以不能直接把單晶片 8051 的TXD和DSP的RXD直接相連接,必須先 透過電壓轉換,利用SN74LVTH245ADW(具有三態輸出的 3.3V ABT 八路匯流 排收發器)轉換成 3.3V,如下圖 2-31所示。
圖 2-30 單晶片 8051 模組 圖 2-31 SN74LVTH245ADW 因為超音波感測器量測方式是使用波形在空中傳遞的時間和速率計算與物 體之間的距離,所以環境因素將會影響到真實的量測結果,所以針對超音波對不 同距離來做真實量測,而超音波在機器人平台的設置如圖 2-32所示,紅色圓圈 為超音波感測器,兩個超音波分別距離地上15cm。
15cm
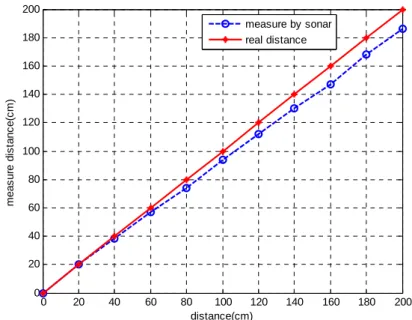
圖 2-32 波音波配置圖 首先針對特定距離 100cm處做量測,取樣 400 筆,如圖 2-33所示,由量測 結果可以發現距離值會有誤差干擾的產生,原因為機器人平台比較低,相對的在 超音波配置,距離地面只有 15cm,將會造成超音波的波形在空間上傳遞干擾比 較嚴重,因此有時會造成量測上的錯誤,為了讓超音波在相同距離上保持一樣的 距離值,將加入中值濾波器來濾掉雜訊所產生的誤差,每取樣十筆量測值後將濾 波一次,濾波後的結果如下圖 2-34所示,經由濾波後,將可以得到穩定的感測 值,而不會有雜訊的產生。0 50 100 150 200 250 300 350 400 0 20 40 60 80 100 120 samples di s tanc e original sonar 圖 2-33 原始超音波值(100cm) 0 50 100 150 200 250 300 350 400 0 20 40 60 80 100 120 samples di s tanc e filter sonar 圖 2-34 濾波後超音波值(100cm) 透過中值濾波器前處理後,接下來分別針對不同距離來做實際量測,如圖 2-35所示,不同距離各取樣500 筆資料,然後每 10 筆再經由濾波器,產生最後 的距離輸出,由量測結果可以發現雖然經由此超音波可以量測到長距離但是隨著 距離越長誤差將越大,不過在60cm以內的量測都相當準確。
0 20 40 60 80 100 120 140 160 180 200 0 20 40 60 80 100 120 140 160 180 200 distance(cm) m e as u re di s tan c e (c m ) measure by sonar real distance 圖 2-35 sonar 不同距離量測
2.3.3 電子羅盤
機器人的轉向判斷上,使用電子羅盤感應磁場(地磁北極)大小與方向,進而 推算出目前的角度變化,所使用的電子羅盤硬體,如圖 2-36所示,V2XE使用新 型係統常用的3V工作電源,具有功耗低、尺寸小、在各種條件下的抗噪聲能力 強、較大的測量靈敏感應區等優點。V2XE結合了PNI公司專利的磁場感應傳感 器和測量電路技術,不受補償漂移的影響,在不同溫度下的測量結果很穩定。 V2XE通過簡單易行的標準SPI接口輸入,輸出數據。透過指令的讀取,電子羅盤 輸出的角度範圍為0
°~ 360
°。2.3.4 紅外線攝影機
紅外線攝影機是運用人類可見光與CCD可感應光源範圍不同的原理所設計。 CCD 是電荷耦合元件(Charge Coupled Device)的簡寫,能將感測到的光轉換成 電荷訊號,加以處理,這是目前以固態影像元件應用在攝影機最尖端的技術。如 圖 2-37所示,為配置在機器人平台上的紅外線攝影機。 圖 2-37 紅外線攝影機
2.4 感測器於機器人平台上之應用
2.4.1 雷射掃描器之避障
經由前面章節2.3.1的介紹,雷射在距離的量測上相當精準,所以本論文把雷 射當作機器人避障的應用,在掃描範圍上,設定為前方18
0
°做環境的掃描,圖 2-38所示,由Borland C++ Builder 軟體所攥寫的人機介面,透過雷射掃描值的讀 取,把雷射感測值直接顯示在人機介面上,以下將詳細說明使用雷射避障的相關 演算法以及範例說明。圖 2-38 雷射掃瞄人機介面 z 雷射避障演算法 首先把 0~180 度的區間分成七個區間,如圖 2-39所示,總共有 0~15 度、 15~45 度、45~75 度、75 度~105 度、105~135 度、135 度~165 度、165~180 度, 人機介面上會先設定安全距離以及安全距離次數。所謂的安全距離為自我定義在 多少距離以上,當成是機器人認為前方沒有障礙物的距離。安全距離次數則為大 於此設定的安全距離的次數,由前面章節2.3.1所介紹的雷射掃描器,精細度為 ,如果所設定的安全距離次數為30,則換算成掃描度數為
10.8
,把此度 數認定為障礙物的寬度。0.36
° ° 每個區間會去計算此區間所量測到的距離是否大於所設定的安全距離次 數,如果小於安全次數,則代表此區所量測到的距離都很近,意味著有障礙物, 因此會放棄此區域,而如果大於所設定的安全距離次數時,則會比較同時也是大 於安全次數的區間,然後選擇含有安全次數最多區間,當成是最空曠的區域,最 後規劃為機器人的避障方向,運作的流程如圖 2-40所示。180
°15°
45
°75
°105
°135
°165
°0
° 圖 2-39 雷射分區圖 圖 2-40 雷射避障流程 z 雷射避障範例說明 以下將分別說明雷射掃瞄器在不同環境狀況下的避障方式,首先設定安全距 離(80cm)及安全距離次數(60)。如圖 2-41所示,為當前方沒有障礙物時,雷射 掃描以及所規劃的避障方向(向前),如圖 2-42所示,為當右方有障礙物時,雷 射掃描以及所規劃的避障方向(向左),圖 2-43所示,為當左方有障礙物時,雷 射掃描以及規劃的避障方向(向右),圖 2-44所示,為當前方以及左、右方都有 障礙物時,雷射掃描後,規劃向後的避障方向。圖 2-41 laser scan(前方沒有障礙物) 圖 2-42 laser scan(右方有障礙物)
圖 2-43 laser scan(左方有障礙物) 圖 2-44 laser scan(前方及左右方有障 礙物)
2.4.2 超音波感測器之避障
由前面章節2.3.2的介紹,可以得知超音波的量測在 60cm以內可以很準確, 所以在沒有配置雷射的機器人上,採用超音波感測器以實現避障功能,超音波各 配置在機器人平台的左、右兩方,透過左、右邊超音波所量測到的距離值來做判 斷,避障的演算法基本概念為:當兩邊超音波感測值同時都大於某設定好的數值 時,則代表前方沒有障礙物,可以往前,當左邊超音波感測值大於右邊超音波感 測值時,則代表左邊比較空曠,可以往左轉,而當右邊超音波感測值大於左邊超 音波感測值時,則代表右邊比較空曠,可以往右轉,以此簡單的判斷機制來實現 閃避障礙物的功能。第三章 ZigBee 無線通訊
33.1 IEEE802.15.4 概述
IEEE 802.15.4/ZigBee 是一種相當先進新穎的短距離傳輸技術標準,從家用 無 線 通 訊 規 格 HomeRF 聯 盟 中 所 分 出 來 的 技 術 , 許 多 人 常 拿 IEEE 802.15.4/ZigBee 與 RFID、Bluetooth 等技術互相比較,以技術層面來看,三者很 顯然是完全不同的技術,不過就應用而言三者的確有些許多相似的地方。 IEEE802.15.4 所定義的低傳輸率無線個人區域網路,是一種網路結構簡單 且低價格的通訊網路,適合在電力供應有限且只需簡單運算之應用的裝置中實 現,其主要的特徵在於短距離傳輸、可靠的資料傳輸、低耗電量、極低的價格及 容易安裝。IEEE 802.15.4 實體層(PHY)採用Direct Sequence Spread Spectrum(DSSS) 技術,這DSSS技術主要的優點在於可以降低類比電路在開發上的複雜度與成 本,其傳輸速率介於250kbps至 20kbps之間,看所用頻段而決定,頻段的使用分 別是2.4GHz的ISM頻段、美國開放的 915MHz頻段,以及歐洲開放的 868MHz頻 段,而不同頻段可使用的通道分別是16、10、1 個。圖 3-1為IEEE 802.15.4 操作 頻帶示意圖。 圖 3-1 IEEE 802.15.4 操作頻帶示意圖
IEEE 802.15.4 的媒體存取層(MAC),定義了兩種傳輸協定,一種是同步模 式(Beacon Mode),另外一種則是非同步模式(Non-Beacon Mode)。
同步模式則是IEEE 802.15.4 比較特別的規格,圖 3-2為同步模式(Beacon Mode)資料傳送行為,利用信標的星型拓撲網路中,為於中心的父節點可以和 其從屬的多個子節點間進行資料交換,但是子節點和子節點間不能進行資料交 換。 圖 3-2 同步模式(Beacon Mode)資料傳送行為 非同步模式簡單來說就是直接使用Unslotted CSMA-CA協定,避免傳輸碰 撞。圖 3-3為非同步模式(Non-Beacon Mode)資料傳送行為,本論文所使用的 資料傳輸方式為非同步模式。 圖 3-3 非同步模式(Non-Beacon Mode)資料傳送行為
3.2 ZigBee
基於IEEE 802.15.4 的規格,ZigBee Alliance定義了網路層(NWK)、應用層 (AP)與安全層(Security)。網路層最重要的工作,在於負責網路機制的建立 與管理,同時具有自我組態路由路徑(Self Configure),以及自我修復路由路徑 (Self Healing)的功能。在網路層中,ZigBee定義了三種角色,第一個是網路協 調者(WPAN Coordinator),負責網路的建立以及網路位置的分配;第二個是路由 器(Router),主要負責找尋、建立、以及修復資料封包路由路徑,並負責轉送資 料封包,同時也具有網路位置的分配的能力;最後一個是末端裝置,只能選擇加 入別人已經形成的網路,可以收送資料,但不能幫忙轉送封包。網路功能是ZigBee 最重要的一個特點,也是與其他WPAN標準最不一樣的地方;以規格來說,網路 層以16bits的資料長度來管理網路位置,理想上在同一個WPAN,可以存在 65536
個ZigBee裝置,彼此透過多重跳點(Multi Hop)的方式,傳遞資訊,圖 3-4為ZigBee 網路拓撲架構。為了在省電、複雜度、穩定性與實現難易度等因素取得一個平衡 點,網路層的路由演算法,使用了下列三種方式:
z AODV 演算法:建立隨易網路的拓樸架構,在 ZigBee 規格中稱為 Table Routing。
z Motorola Cluster-tree 演算法:建立樹狀的拓樸架構,在 ZigBee 規格中稱為 Tree Routing。
PAN coordinator Full Function Device Reduced Function Device
Star
Mesh
Cluster Tree
圖 3-4 ZigBee 網路拓撲架構3.3 ZigBee 硬體
以RF晶片為代表性,現今 2.4G Hz的RF晶片以國外的Chipcon市場佔有率較 高,其RF晶片CC2420 搭配Atmel AVR 8 bits微處理器的平台,是大多數人接觸到 ZigBee的第一個開發平台,而且CC2420 在市面上已經銷售了百萬顆了。而最近 也開始推出一顆CC2430 型號的系統晶片,它主要是將CC2420 和 8051 結合為 一,有128KB、64KB和 32KB三種版本的快閃記憶體空間,以及 8KB的記憶體, 可以供客戶依據需求的選擇,大大降低了ZigBee相關產品的成本。 圖 3-5為 Chipcon CC2430。 圖 3-5 Chipcon CC2430 圖 3-6 CC2430ZDK的CC2430ZDK模組,如圖 3-6所示,硬體上共有SmartRF04 和CC2430DB兩種, 如圖 3-7、圖 3-8所示,主要核心為CC2430 System-on-Chip裡面包括CC2420 發 送器、8051 控制器、FLASH記憶體以及相關的周邊電路。 圖 3-7 SmartRF04EB 板 圖 3-8 CC2430DB 板
3.4 機器人無線通訊
經由以上對於IEEE 802.15.4 的簡介,可以得知 ZigBee 相當適合應用在多節 點以及短距離傳輸上,以下將詳細介紹 ZigBee 如何應用在分散式多機器人通訊 上,包括網路的拓撲以及機器人間的通訊封包協定。3.4.1 ZigBee 網路的形成
z ZigBee 網路位址分配演算法當網路形成時,ZigBee 的協調者(Coordinator)必須要先定義 ZigBee 路由器 最多可容許連線之裝置個數(Cm),以及最多的子 ZigBee 路由器數量(Rm)以及網 路 的 深 度(Lm) , ZigBee 規 定 Cm Rm , 因 此 一 ZigBee 路 由 器 至 少 可 供 (Cm-Rm)ZigBee 終端設備連結上它。裝置的網路位址是由其父節點(Parent router)
所給定的,對於ZigBee 協調者,整個網路的位址空間被劃分成 Rm+1 塊,前 Rm 塊位址空間將分配給其 Rm 個子路由器,而最後一部份則保留給與之連線之 (Cm-Rm)個 ZigBee 終端設備。ZigBee 路由器利用 Cm、Rm、Lm 來計算一個稱 為 的參數,然後再利用 來計算其子路由器以及終端設備的網路位址,
≥
skipC
C
skip假定一路由器位於網路的第d 層,
C
skip的數值由下式可得: 11
(
1), if Rm=1
( )
1
,
1
Lm d skipCm Lm
d
C
d
Cm
Rm
Cm Rm
Otherwise
Rm
− −+
− −
⎧
⎪
= ⎨ +
−
−
⎪
−
⎩
i
i
(3-1) 位址的分配是由 ZigBee 協調者開始,會先將自己的位址指定為 0,以及深 度指定為0,假設一個在深度 d 的父節點的位址以被指定為
A
parent,該父節點將 指定他的第n 個子路由器的位址為A
parent+
(
n
− ×
1)
C
skip( )
d
+
1
,並且指定他的 第n 個子終端設備的位址為A
parent+
Rm C
×
skip( )
d
+
n
。 z 無線區域網路建構 多機器人合作主要就是可以透過彼此機器人間的無線通訊做資料交換,以達 到資源分享的目的,最後提升整體的工作效率,同時為了讓傳輸端和接收端有即 時的交換訊息,所以在無線通訊上比須使用到點對點的直接通訊方式。 在ZigBee的網路拓撲決定使用Mesh的方式,也就是全部節點都扮演router的 角色,在協調者(coordinator)上設定Cm=4、Rm=4、Lm=5,可容許底下加入 4 個 子節點,而最多可以有 4 個router,深度為 5 層,位址分配如圖 3-9所示,協調 者的第一個到第四個子路由器的位址將分別被指定為1、342、683、1024,而真 實多機器人系統的網路架構如圖 3-10所示,虛線部分代表ZigBee無線定位所走 的傳輸路徑以及監控端的傳輸路徑,而棕色實線部份代表機器人間的無線通訊。 在網路角色的硬體使用上,扮演與監控端連接的Coordinator和扮演Router之ㄧ的 都採用SmartRF04EB,另外各機器人上考量到體積問題所以都採用CC2430DB。在網路的形成順序方面,首先透過Coordinator 建立一個 PAN(Personal Area Network),然後所有的 Router 在陸續加入此網路中,同時經由 bind 的程序來完
成傳輸路徑連結的動作,包括Coordinator 和 Router 之間的連結,以及 Router 和
C R
R R
R Addr=0x0000Cskip=341 Addr=0x0001
Cskip=85 Addr=0x0156 Cskip=85 Addr=0x02AB Cskip=85 Addr=0x0400 Cskip=85 Cm=4 Rm=4 Lm=5 C: Coordinator R: Router 圖 3-9 ZigBee 網路位址分配 圖 3-10 多機器人無線通訊 利用Borland C++ Builder ,攥寫遠端電腦的監控人機介面,如圖 3-11所 ,搭配多機器人無線通訊架構的使用,即可同時觀測機器人資訊以及遠端遙控 示 軟體 多機器人。
圖 3-11 人機介面
3.4.2 多機器人間無線通訊封包協定
在多機器人的無線通訊傳輸上,各機器人都有搭配 ZigBee 模組,所以在傳 輸上不僅可以當成發送端也可以當成接收端,而當機器人數目越多,代表所要傳 的訊息封包種類越多,所以必須要定義訊息封包的種類,讓機器人可以分辨目前 所收的訊息為何和目前所要送的訊息為何,而所要傳輸的封包為監控端對機器人 端以及機器人端對機器人端。 對於訊息的種類分辨上,使用不同的開頭封包代表不同的訊息,如下表 3-1 所示,Header表示開頭封包,各ZigBee節點接收端透過此封包判斷訊息種類為何 以及下一步是否還要傳送至另一ZigBee節點,Length代表訊息的封包長度,開頭 封包為第一層的判斷程序,主要是區隔各種不一樣功能的訊息,第二層則是判斷 此訊息要傳給網路中的哪一台機器人,以Header為 0x0B、0xEF、0xFA為例說明。表 3-1 訊息定義代碼
Header Length Type Information meaning
0x0B 4 Bytes Monitor
command
remote robot’s motion
0xEF 4 Bytes Monitor
command
return localization information
0xFD 4 Bytes RSSI packet Robot1 RSSI
0xFB 4 Bytes RSSI packet Robot2 RSSI
0xFF 4 Bytes RSSI packet Robot3 RSSI
0xFE 14 Bytes Localization
packet
information for Robot1
0xF1 14 Bytes Localization
packet
information for Robot2
0xF2 14 Bytes Localization
packet
information for Robot3
0xFA 14 Bytes Inter-robot packet message exchange between each Robot 開頭封包為 0x0B,代表此訊息為監控端所下的命令,主要目的為遠端遙控 各別機器人的動作,例如前進、後退、左轉、右轉等等,至於如何告知Coordinator 要送此命令到哪台機器人上則判斷開頭封包的後一個封包,如圖 3-12所示。相 對應的第二、三、四封包,如表 3-2所示。 圖 3-12 遙控動作命令訊息 表 3-2 遙控動作命令代碼 封包2 封包3 封包4 Information meaning
11 Robot velocity angular velocity Transmit to Robot1 22 Robot velocity angular velocity Transmit to Robot2 33 Robot velocity angular velocity Transmit to Robot3
3 Robot velocity angular velocity broadcast
開始回傳自己本身的感測資訊以及定位,以第二封包和第三封包為判斷依據,分 別代表開始回傳Robot資訊和停止回傳Robot資訊,以及開始自主搜尋的命令,如 圖 3-13所示,相對應的第二和第三封包,如表 3-3所示。 圖 3-13 遙控回傳資料命令訊息 表 3-3 遙控回傳資料命令代碼 封包2 封包3 封包4 Information meaning
11 22 0xFC Robot1 start to return information 22 11 0xFC Robot1 stop to return information 55 66 0xFC Robot2 start to return information 66 55 0xFC Robot2 stop to return information 77 88 0xFC Robot3 start to return information 88 77 0xFC Robot3 stop to return information
33 44 0xFC All Robot start to auto-search
開頭封包為 0xFA,代表此訊息為機器人間的資料傳遞,為了分辨是哪台機 器人傳送到哪台機器人,由封包2 和封包 3 來判斷,封包 4 到封包 13 則為所要 傳輸的感測資料。封包 2 代表發送端,封包 3 代表所要傳送的目的地,例如以 Robot1 要送訊息給Robot2 為例,第 2 封包則為 1,第 3 封包則為 2,以此類推, 如圖 3-14所示。 圖 3-14 機器人間訊息
3.4.3 ZigBee 與 Wi-Fi
由於本論文在無線網路的使用上還包括802.11b (Wi-Fi),用來傳輸資料量比 較大的影像資訊,在機器人系統中ZigBee和Wi-Fi將會同時使用到,所以必須考 量到兩者之間是否有干擾的產生,以下將做簡單的分析和探討。 IEEE 802.15.4 (ZigBee)在2.4GHz (2400Hz~2483.5Hz)的頻段上訂定有16個頻 道,分別是頻道11到頻道26,每個頻道頻寬2MHz,頻道與頻道之間沒有頻譜重 疊,各頻道中心頻率相間隔5MHz,而本論文中所使用的另一個無線網路IEEE 802.11 (Wi-Fi)的工作頻帶也是在2.4GHz,其頻段上訂定11個頻道,分別是頻道1 到頻道11,每個頻道頻寬為22MHz,各頻道中心頻率相間隔10MHz,因此IEEE 802.11在頻道的使用上通常最多以3組不重疊的頻道為主,分別為頻道1、頻道6、 頻道11。 如圖 3-15所示,我們將IEEE 802.15.4 和IEEE 802.11 所佔用的頻道相互比較 後,可以看出IEEE 802.15.4 和IEEE 802.11 之間無衝突的頻道分別為頻道 15、頻 道 20、頻道 25、頻道 26,,因此理論上在這些頻道下使用建立 ZigBee無線網 路,比較不會與802.11 相互干擾。但是在實際的環境裡,IEEE 802.11 在頻道的 使用上會有所漂移,所以在IEEE 802.15.4 的頻道中,只有頻道 25 和頻道 26 會 跟IEEE 802.11 的頻道比較少干擾,所以本論文中的ZigBee網路將設定在頻道 26,以減少和IEEE 802.11 頻道上的重疊,避免在無線封包上的碰撞和延遲等等。 圖 3-15 IEEE 802.15.4 和 IEEE 802.11 頻道相互重疊圖第四章 多機器人合作策略與行為控制架構
4 關於多機器人,好處在於提升整體團隊的工作效率,藉由不同的合作策略將 可以明確的指示機器人間要如何互動,本章將詳細的敘述多機器人間如何透過所 設計的合作策略以及配合機器人本身的行為控制來達到多機器人合作搜尋目標 物的目的。4.1 團體合作方式分類
不同的工作性質,將有不一樣的團體合作方法,例如簡單的工作性質就不太 需要團體間訊息的溝通就可以完成,相對的遇到複雜的工作性質時,則需要團體 間大量的溝通協調,互相交換訊息才能完成工作,另外在某些情況,則必須要有 一個領導者來協調整個團體,大家透過溝通來完成工作。因此團體合作的方式大 致分為以下三類: (1) 沒有溝通 團體間沒有所謂的訊息交換,各自完成自己的工作,這也是最基本的合作, 但是做沒有效率的合作。 (2) 單一領導者 單一領導者的合作是指,在這個團隊中有一位領導者,這個領導者會指派任 務給下面的執行者來執行。相較於沒有溝通的合作方式,有一領導者的合作 方式有可能會有較好的效率,但是若是領導者能力不夠好或是任務過多就會 造成整個工作的停滯。 (3) 多人討論 在多人討論的模式下,每個個體都會提出意見,經由一些事先設定的條件來 做判斷之後,決定最後的行動,相較於單一領導者的情況,在這種模式之下就比較不會有工作停滯的情況發生。 經由以上的說明,多機器人在執行搜尋任務時,必須要互相分享搜尋的資訊 以及討論下一步該往哪個地方搜尋,所以在合作的方式,本論文將採用多人討論 的團體合作方法。有了初步的團體行動概念,接下來將探討關於機器人行為控制 和團體間如何透過所設計的合作策略來提升整體工作效率。
4.2 基於行為模式之機器人控制理論
在機器人的自主行動控制上,將使用基於行為模式的方法來控制機器人的行 動,到目前為止有關基於行為模式的機器人控制架構,以其行為輸出的選擇方式 大致上可分為以下三類: (1) Subsumption Architecture ─ 行為優先權Subsumption 控制架構如圖 4-1所示,首先由MIT 之Rodney Brooks 在1986 年所提出[18],其為一個階層式的系統架構。對一個以達成任務為目的行為來說 Subsumption 架構可以表示成許多單獨的行為層,而每一個行為層皆有其個別的 目的及行為輸出,且這些所有的行為層是同時地在運作的。至於整個系統的最後 行為輸出,由於各行為擁有不同的優先權,因此低階的行為在某些情況條件下會 被高層的行為所抑制,造成最終系統輸出只會有其中某一個單一行為,而最終 輸出是哪個行為則要看當時的情況條件而定。 Subsumption 架構的優點在於增加高層行為並不會需要修改已經設計好的 低階行為,因為最後仍能夠透過抑制的效果來控制最後的輸出,對於系統未來的 擴充性有很大的優勢。
圖 4-1 Subsumption Architecture
(2) Schema-based Architecture ─ 行為融合
Schema-based 控制架構,如圖 4-2所示,首先由Georgia Tech 之Ronald Arkin
在 1980 年代末期所提出[19],其為一個行為並行式的系統架構。每一個行為皆 可表示成一個單獨的Motor Schema,擁有自己的目的及輸出(如控制馬達前進之 速度大小與方向),其輸出即可表示為一個速度向量。在系統的輸出方面,採用 的是向量總和的方式,即每一單獨行為之輸出會乘上一個屬於自己的行為權重後 再加總起來(所有行為之權重數總和為 1),做為最後馬達驅動的輸出。因此在行 為融合架構下的整體行為輸出並不是其中某一單獨行為,而是多個行為融合後所 得到的結果。 圖 4-2 Schema-based Architecture
(3) Action Selection ─ 行為競爭
Action Selection 之行為架構最早由 Pattie Maes 在 1980 年代末期所提出 [20],其為一個行為競爭的系統架構。與 Subsumption 架構類似的是其最後的系 統行為輸出為其中的某一個單獨行為;但不同的是,在Subsumption 架構各行為 有不同的優先權,但在Action Selection 架構裡所有行為是平等競爭的,其每個 行為皆有其屬於自己的動機,而根據當時的環境情況會影響各行為的動機大小, 最後由動機最大的那個行為做為最後的系統行為輸出。 為提昇機器人團隊在執行合作搜尋任務上的工作效率及提高各機器人的自 主能力,本論文將分別就已知環境和未知環境的條件來設計相對應的合作策略, 同時轉換成基於行為模式之多機器人合作搜尋架構,其設計理念如下: (1) 為 了 提 昇 各 機 器 人 間 之 互 動 性 , 因 此 採 用 基 於 行 為 模 式 (Behavior-based) 為 基 礎 之 控 制 方 式 , 使 用 優 先 權 的 比 較 (Subsumption Architecture),其中機器人之行為設計乃經由不一樣的合作策略所產生。 (2) 在機器人的行為選擇方面,由其自身感測器對環境的感測,產生其個別行為, 另外透過合作策略,與其他機器人間之溝通、分享,產生其群體行為,最後 透過系統架構的運作,促其選擇適當的行為輸出。
4.3 已知環境合作搜尋策略
首先針對所要搜尋的場地環境來做定義,可歸分成以下兩種: (1) 已知環境: 只知道所要搜尋的場地面積大小,但是並不知道場地裡面的環境 擺設,當然也不知道目標物的位置。 (2) 未知環境: 對所要搜尋的場地完全不知道,如場地大小、目標物位置、環境 擺設等等。 以上兩種環境都必須要依靠機器人本身自主的搜尋和感測,有了對場地的基 本定義後,將分別提出一套合作策略以及所相對應的行為模式架構,使多機器人可以自主性的達到合作搜尋目標物的任務。 對於搜救者而言,知道越多災難現場的資訊,相對來說,在執行搜救任務上 會更有幫助,同樣的,如果事先可以知道場地的一些資訊,將可以有效的提升機 器人自主搜尋的能力。在本論文中,已知環境對於機器人而言,得到的資訊就是 知道所要搜尋的場地大小,以下將詳細的介紹針對已知環境而設計的合作搜尋策 略。 仿照吸塵器機器人的概念,利用一次可感測的範圍來規劃下一步該往哪裡走 以及走多少距離,相對於本論文的機器人,主要感測環境的感測器為超音波感測 器和雷射掃瞄器,透過前面章節2.3的感測器硬體討論,可以得知: (1) 雷射掃瞄器在 400cm 以內的範圍都可以偵測到很精確的距離資訊。 (2) 超音波感測器則在 60cm 範圍內的感測可以偵測到比較精確的距離資訊。 (3) 機器人的尺寸為長 40cm、寬 20cm。 所以首先對於各機器人本身定義一個個人的區域範圍,如圖 4-3所示。 圖 4-3 機器人個人區域 利用機器人個人區域為判斷依據,首先設計一合作策略,本論文在此定義為 個人區域策略(簡稱algorithm1),以一個350cm X 350cm的場地為例,如圖 4-4所 示,對於每台機器人都有定義其個人的區域範圍,如圖上圓圈所示,每個圓圈大 小為直徑100cm。
各機器人本身具備自主搜尋的能力,每隔一段時間後將透過ZigBee無線通訊 來進行資訊的交換,分享目前每台機器人的個人區域是否有重疊到,透過此機制 來達到分散的動作,如圖 4-4所示,當Robot1和Robot2的區域範圍互相重疊到 時,另外Robot2則做出避開此區域的動作,透過此方法將可以達到初步的分散動 作,整體的運作模式如下: 自主能力: (1) 具備自主的隨機環境探索行為。 (2) 機器人透過超音波感測器或雷射掃瞄器來達到避開環境中的障礙物。 (3) 透過攝影機來判別是否有發現目標物,如果有就停止搜尋。 合作能力: (1) 各機器人透過ZigBee無線通訊來交換訊息,包括機器人的位置資訊(由馬達 Encoder得知)以及機器人狀態(是否找到目標物)。 (2) 透過位置資訊可以得知是否有重疊到其他機器人的個人區域,如果有重疊到 就進行避開的動作,以此來達到分散在環境中。 r Target r
Robot individual area Inter-robot communication Ro bot 1 Robot 3 Robot 2 350 圖 4-4 個人區域策略示意圖