國 立 交 通 大 學
電信工程研究所
碩 士 論 文
藉非直線路徑排序移除提高定位精準度之研究
Improved Positioning Accuracy by
NLOS Detection Order and Deletion
研究生:陳谷邦
指導教授:謝世福 教授
藉非直線路徑排序移除提高定位精準度之研究
Improved Positioning Accuracy by
NLOS Detection Order and Deletion
研 究 生:陳谷邦 Student:K. P. Chen
指導教授:謝世福 Advisor:S. F. Hsieh
國 立 交 通 大 學
電信工程研究所
碩 士 論 文
A ThesisSubmitted to institute of Communication Engineering College of Electrical and Computer Engineering
National Chiao Tung University In partial Fulfillment of the Requirements
For the Degree of Master In
Communication Engineering
July 2012
Hsinchu, Taiwan, Republic of China
藉非直線路徑排序移除提高定位精準度之研究
學生:陳谷邦 指導教授:謝世福
國立交通大學電信工程研究所
中文摘要
手機定位中最常見的方式有 TOA、TDOA、AOA 與 RSS。不管那一種方式都會面臨 NLOS(Non-line-of sight)的問題。NLOS 會使得量測到的資訊產生過大的誤差,而且這 問題在手機定位上很常見。本篇論文會討論定位流程,此流程首先利用 TOA 量測值及基 地台位置,提出三種簡易的 NLOS 檢測方式。這些檢測方式有兩個優點,第一不需要事 前知道 NLOS 的統計性質,第二運算簡單。做完以上的 NLOS 檢測以後,在流程中依據檢 測值排列 NLOS 可能性的大小,移除 NLOS 可能性較大的資訊,最後再由所留存的量測資 訊做 NLOS 效應降低的定位演算法。經由以上移除部分 NLOS 量測資訊,可提高手機定位 的準確性,同時也可降低運算複雜度。本論文將會詳細介紹以上所提的三種檢測方式以 及如何依據檢測結果做排序、移除,並針對檢測法做數學分析。最後以電腦模擬驗證三 種檢測法效能,以及檢測法對於定位的運算量與精準度影響。Improved Positioning Accuracy by
NLOS Detection Order and Delete
Student:K.P. Chen Advisor:S.F. Hsieh
Institute of Communication Engineering
National Chiao Tung University
Abstract
The common ways of positioning include of TOA, TDOA, AOA, RSS. No matter which way is used, the issue of Non-line-of sight (NLOS) is troublesome. NLOS suffers inaccurate measurements. This paper discussed about positioning processes. Processes started with using TOA measurements and base station locations, three simple NLOS detection methods were proposed. There were two advantages for these detection methods: firstly, the statistics characteristics of NLOS can be ignored beforehand; secondly, calculation is simple. After the above mentioned NLOS detection, we sort results acquired in NLOS probabilities order, delete higher NLOS probability entries, finally, perform NLOS effect reduced positioning algorithm on remaining measurements. The removal of some NLOS measurements improves mobile phone positioning accuracy while reducing complexity of computation. Details of the three detection methods, steps of ordering, deletion performed based on detection results, mathematical analysis applied on detection methods will be elaborated. Finally, the
performance of three detection methods, the interference in computational load and accuracy in positioning by these methods were verified by computer simulation.
誌謝
在交大研讀碩士班的這幾年,在碩二家中發生一些事務無心在課業上,萌生休學念 頭,告知指導教授謝世福老師,回到家中處理,感謝親朋好友幫忙處理,處理完後,朋 友建議我放棄休學,家中一切有人幫忙照料,便寄信給謝世福老師希望老師可以再次指 導我,相當感謝老師給我機會讓我繼續完成學業,並且不厭其煩細心指導我思考問題與 解決問題的能力,這些能力對於未來處理問題能力有相當大的幫助。我能完成碩士學業, 首要感謝老師給我機會再一次指導我,還有親朋好友幫忙處理家中事務,以及實驗室的 學長、學姊與同學相互討論交流經驗這些都是我能夠順利完成碩士學位不可或缺的幫 助。目錄
中文摘要...
iAbstract...
ii誌謝...
iii目錄...
iv圖片目錄...
vii表格目錄...
x1. 簡介...
12. NLOS 效應...
4 2.1 背景...4 2.2 系統模型...5 2.3 全面篩選...6 2.4 加入限制式...9 2.5 最大概似函數(Maximum Likelihood) ...143. 檢測法提高精確度
...16 3.1 動機...16 3.2 直接檢測...18 3.3 上限檢測...19 3.4 餘差檢測...25 3.5 排序與移除...28 3.6 全面篩選...293.7 加入限制式...31
3.8 最大概似函數(Maximum Likelihood) ...32
4. 數學分析
...354.1 直接檢測正確率分析...35
4.2 NLOS 上限(NLOS UB)定義...38
4.2.1 利用交集區域計算 NLOS 理論上限...39 4.2.2 簡易計算 NLOS 上限...42 4.2.3 當交集區不存在修正 NLOS 上限...43 4.3 上限檢測正確率分析...44 4.4 直接檢測與上限檢測正確率比較...47 4.4.1 高斯近似下比較...47 4.4.2 指數近似下比較...49 4.5 全面篩選法初始點的誤判分析...50
5. 電腦模擬
...545.1 NLOS 上限(NLOS UB)...54
5.1.1 基地台個數為 3...54 5.1.2 改變基地台個數對 NLOS 簡易上限影響...58 5.2 三種檢測法比較...59 5.2.1 正確率比較...60 5.2.2 不同參數對檢測法影響...63 5.3 全面篩選法...66 5.3.1 全面篩選法初始點誤判模擬...66 5.3.2 以檢測法提高精確度...68 5.3.3 以檢測法降低運算複雜度...71 5.4 加入限制式...72
5.4.1 以檢測法提高精確度...72
5.4.2 以檢測法降低運算複雜度...75
5.5 最大概似函數(Maximum Likelihood)...76
6. 結論與未來展望
...77圖片目錄
圖 1.1 NLOS 示意圖...1 圖 1.2 排除 NLOS 所帶來效果...2 圖 1.3 NLOS 處理簡易流程圖...3 圖 2.1 TOA 定位示意圖...4 圖 2.2 NLOS 效應示意圖...5 圖 2.3 Si、B 、ij b 幾何示意圖...6 ij 圖 2.4 全面篩選說明圖...7 圖 2.5 全面篩選誤差小估計位置偏離 MS 說明圖... ...9 圖 2.6 加入限制式說明圖...10 圖 2.7 TOA(LOS)上下限示意圖...11 圖 2.8 限制式非唯一解示意圖...13 圖 3.1 NLOS 處理流程...17 圖 3.2 三種檢測法示意圖...18 圖 3.3 直接檢測示意圖...18 圖 3.4 直接檢測誤判示意圖...19 圖 3.5 利用交集區判別 NLOS/LOS...20 圖 3.6 簡易 LOS/NLOS 檢測...21 圖 3.7 利用交集區找 NLOS 理論上下限...22 圖 3.8 NLOS 簡易上限示意圖(基地台個數 2)...23 圖 3.9 NLOS 理論與簡易上限示意圖... ...23 圖 3.10 上限檢測示意圖(基地台個數 3)...24 圖 3.11 上限檢測誤判示意圖...25 圖 3.12 餘差檢測估計 pˆ 示意圖...26圖 3.13 餘差檢測示意圖...27 圖 3.14 餘差檢測誤判示意圖...27 圖 3.15 交集區改變示意圖...31 圖 4.1 直接檢測正確率分析說明圖...36 圖 4.2 手機落在交集區外...39 圖 4.3 基地台個數 3 NLOS 理論上限示意圖...40 圖 4.4 基地台個數 3 NLOS 理論上限參數圖...40 圖 4.5 基地台個數 2 NLOS 簡易上限示意圖...42 圖 4.6 交集區不存在修正 NLOS 上限...43 圖 4.7 直接/上限檢測正確率比較示意圖...48 圖 4.8 全面篩選初始點誤判示意圖...51 圖 4.9 全面篩選初始點誤判機率密度...52 圖 5.1 蜂巢式網路示意圖...54 圖 5.2 理論/簡易 NLOS 上限比較...55 圖 5.3 改變 NLOS 理論/簡易上限示意圖...55 圖 5.4 改變不同參數比較 NLOS 理論/簡易上限落差...56 圖 5.5 對 NLOS 理論/簡易上限改變示意圖...57 圖 5.6 對 NLOS 理論/簡易上限改變示意圖...58 圖 5.7 改變基地台個數對檢測值影響...59 圖 5.8 兩種機率近似的機率分佈圖...59 圖 5.9 檢測法比較示意圖...61 圖 5.10 改變距離比較理論與模擬正確率... ... ...62 圖 5.11 改變移除個數對檢測法的影響...64 圖 5.12 改變 LOS 個數對檢測法的影響...64 圖 5.13 改變 NLOS 大小對檢測法的影響...65 圖 5.14 改變基地台個數對檢測法的影響...65
圖 5.15 全面篩選初始點誤判示意圖...66 圖 5.16 全面篩選初始點誤判機率...67 圖 5.17 改變基地台個數觀察初始點誤判機率...68 圖 5.18 全面篩選搭配餘差檢測對於不同移除個數的影響...69 圖 5.19 全面篩選搭配檢測法...69 圖 5.20 改變 NLOS 大小全面篩選搭配檢測法...70 圖 5.21 改變基地台個數全面篩選搭配檢測法...71 圖 5.22 檢測法降低全面篩選運算複雜度...72 圖 5.23 加入限制式搭配餘差檢測對於不同移除個數的影響...73 圖 5.24 加入限制式搭配檢測法...73 圖 5.25 NLOS 機率越大 RMSE 降低說明圖...74 圖 5.26 檢測法降低加入限制式運算複雜度...75 圖 5.27 檢測法調整 ML...76
表格目錄
表 3.1 三種檢測法比較表...28 表 3.2 排序與移除範例...28 表 3.3 調整 NLOS 機率說明...33 表 3.4 調整 NLOS 機率範例...33 表 4.1 直接檢測兩種近似下正確率...37 表 4.2 上限檢測兩種近似下正確率...47 表 5.1 直接/上限檢測法正確率比較表...60第一章
簡介
隨著通訊科技發展,手機功能已經不再侷限於通話功能,在眾多功能當中已無線網 路應用,最為人關注。無線網路應用除了網路資料傳輸以外,另外令人關注的其中一個 重要應用,就是手機定位的功能,且定位功能也會間接影響手機在移動時做基地台切換 (Hand-off),以維持無線網路資料傳輸品質。目前最常見定位的技術,是 GPS(globe position system),但 GPS 最大缺點電波傳播受大氣影響,訊號易被建築物和地形地物 遮蔽且更重要的是 GPS 成本可能比手機成本還高,而手機定位利用基地台做定位,雖然 也有被建築物和地形地物遮蔽可能性此種效應稱為 NLOS(non-line-of sight)效應[1]- [11]如下圖 1.1 所示,但成本明顯比較便宜。也因為不管是 GPS 或者是手機定位都會面 臨 NLOS,所以許多關於定位的研究,都將 NLOS 列入重要考量。 圖 1.1 NLOS 示意圖目前最常見手機定位的方式有 TOA(time of arrival) [1]- [7]、TDOA(time difference of arrival) [7,8]、AOA(angle of arrival) [8]- [11]、RSS(received
signal strength) [12,13]。但不管何種方式都會面臨 NLOS 效應產生定位誤差,針對 NLOS 影響,對 NLOS 處理常見的方法,如[14]所分類分為兩大類,第一類 NLOS 檢測(NLOS detection)這一類方式如[15,16,17],第二類降低 NLOS 效應(NLOS mitigation)如[1]- [6], [18]-[21]。
如下圖 1.2(a)所示手機位置為紅色方形,手機信號到各基地台時間轉換為距離, 可知手機位置應落在以基地台為圓心,量測距離為半徑的圓上,如紅色方形到藍色小圓 距離為量測距離,以藍色小圓為圓心量測距離為半徑可畫出 TOA 1 的藍色大圓,手機落 在 TOA 1 圓上,同理手機會落在 TOA 2、3 圓上,但第四個基地台發生 NLOS 使量測距離 額外多出 NLOS 偏差量使手機落在綠色大圓內,如果將所有量測距離做定位會受 NLOS 影 響(綠色大圓)造成估計位置偏離手機位置,而如果用 NLOS 檢測出 TOA 4 為 NLOS,排 除 NLOS 用剩餘 TOA 1、2、3 做定位則估計位置會接近真實位置如圖 1.2(b)
圖 1.2(a)未排除 NLOS 圖 1.2(b)排除 NLOS
圖 1.2 排除 NLOS 所帶來效果 ,這一類方式通常需要 NLOS 統計性質或這是通道(channel)統計資訊,如果統計性質的 資訊本身就有誤差,也會影響 NLOS 檢測正確率,另外即使統計資訊誤差小,光要做檢 測,也需要相當程度運算量,這種方式通常適用在已經確定統計資訊,且為了達到更精 準的定位效果付出了運算複雜度高的代價。 另外一類 NLOS 效應降低方式相當多,下面舉幾種常見方式,第一種考慮所有可能 性產生許多候選點再從眾多候選點做篩選再加權平均決定位置如[1,2],第二種外加限 制式求餘差最小的解如[3]- [6],第三種套用已經發展好的 NLOS 模型估計位置如 -60 -40 -20 0 20 40 60 80 100 120 -40 -20 0 20 40 60 80 100 120 TOA1 BS1 TOA2 BS2 TOA3 BS3 TOA4 BS4 MS MS estimate TOA1 TOA3 TOA2 TOA4(NLOS) BS4 BS2 BS3 BS1 MS MS estimate -60 -40 -20 0 20 40 60 80 -40 -20 0 20 40 60 80 100 120 BS2 TOA1 TOA2 TOA3 BS3 BS1 MS estimate MS
[19,20],第四種可以利用 NLOS 統計資訊搭配 ML(Maximum Likelihood)解如[3,21],這 些方式會在第二章做詳細說明 。
本論文混合兩類方式(NLOS 檢測、降低 NLOS 效應),先做 NLOS 檢測排除部分 NLOS,
剩餘的量測值,在使用第二類方式再降低 NLOS 效應,因為在排除動作可能無法完全將 所有 NLOS 排除,再利用第二類方式對剩餘 NLOS 做處理,流程如下圖 1.3。
圖 1.3 NLOS 處理簡易流程圖
本論文提出三種檢測方式,分別為直接檢測、上限檢測以及餘差檢測根據不同資訊 來決定 NLOS 可能性大小,直接檢測採用 TOA 量測到的資訊,上限檢測採用 TOA 與 BS 之 間的距離計算 NLOS 上限的資訊,餘差檢測先以簡易方式估計位置再由此位置計算 NLOS 偏差量的資訊。而由這三種檢測方式,根據檢測值做排序,再移除 NLOS 可能性較大的 量測資訊,最後利用剩餘量測資訊做 NLOS 效應降低的定位演算法得到最後估計位置。 本章最後說明論文整體架構,第二章會先針對文中所有用到的符號先做定義,並且 對系統採用的雜訊、NLOS 偏差量採用的模型做說明,與其他降低 NLOS 效應論文,做簡 單介紹,第三章針對我所提的方法做解釋,並且說明能夠作檢測的原因,第四章對於直 接檢測、上限檢測做數學分析,並且對全面篩選誤判做分析,第五章電腦模擬以模擬方 式檢驗我所推導數學式子以及驗證我的方式的確明顯改善原本方法,第六章結論以及我 的研究往後的改善之處。 排序移除部分量測資訊 NLOS 效應降低的定位演算法 NLOS 檢測法 所有 TOA 量測與基地台位置
第二章
NLOS 效應
2.1 背景
直線路徑 LOS(line of sight),雜訊為 0 情況下 TOA 量測值為訊號由手機 MS 到基 地台 BS 之間的時間差轉換為距離,當基地台個數大於三個,所有 TOA 量測值會交於一 點,即使受雜訊擾動也可以由 TOA 量測值估算出手機位置[1]- [7]如下圖 2.1,手機位 置 MS(紅色方形)到各基地台位置(三小圓)為真實距離,量測距離為受雜訊擾動(三 大圓)使手機位置落在大圓周附近,估計 MS 方法常見是在平面上找一點離所有圓平方 距離和最短(最小平方近似解),估計手機位置(黑色星號)雖受雜訊影響但仍然在真 實位置附近。 圖 2.1 TOA 定位示意圖 NLOS 會對於 TOA 量測的值額外再加上恆正的 NLOS 偏差量,這些額外的偏差量,會
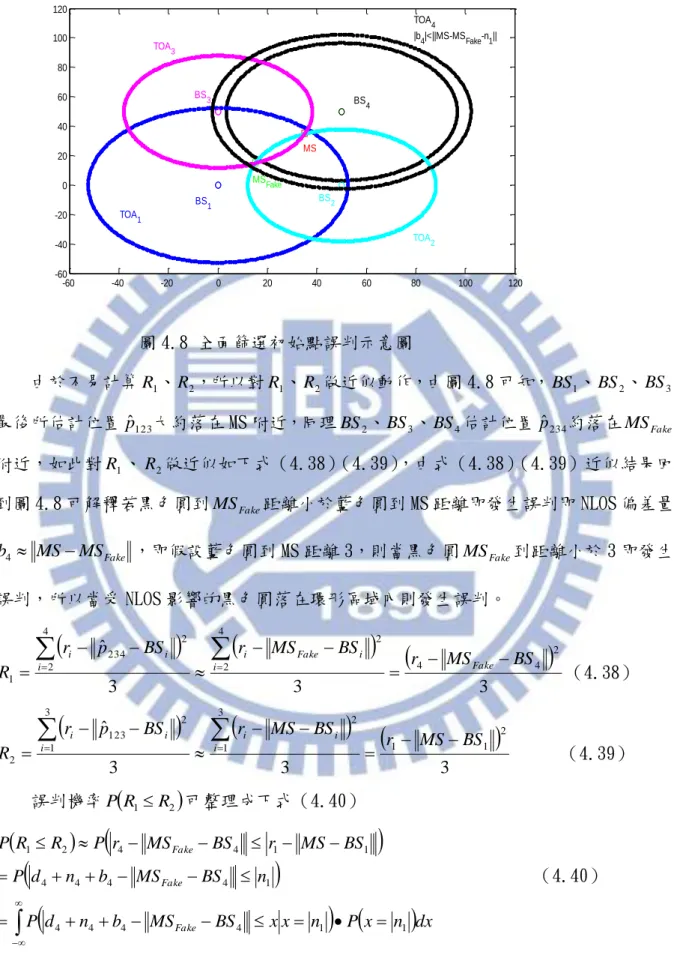
影響到定位的精確度如圖 2.2,與圖 2.1 相同差別只在於BS3量測值包含 NLOS 偏差量, 使量測距離(紅色圓半徑)明顯大於真實距離(紅色方形到紅色小圓),最後估測位置 (黑色星號)受 NLOS 偏差量影響,使最後手機估計位置偏離真實位置,因為圖 2.2 所 估計位置離所有圓平方距離和最短。 -40 -30 -20 -10 0 10 20 30 40 -40 -30 -20 -10 0 10 20 30 40 BS1 BS2 BS3 TOA1 TOA2 TOA3 MS p^
圖 2.2 NLOS 效應示意圖 在這一章我們將討論,對於降低這些 NLOS 偏差量影響(NLOS mitigation)一些其 他研究常見方法。
2.2 系統模型
定義MS
X,Y
為手機位置,BSi
Xi,Yi
,i1N為第 i 個 BS 位置,di為 MS 到 第 i 個 BS 之間得真實距離如下式
2 2 Y Y X X MS BS di i i i (2.1)第 i 個 BS 量測雜訊為高斯分佈ni ~ Normal
0,
i2,NLOS 偏差量為指數分佈bi ~ Exp
i ,故 TOA 量測值如下式 i i i i d n b r (2.2) (2.2)式中,如果第 i 個量測值為 LOS,即bi 0。 在一般的定位方式[1]-[7],定位方式採最小平方近似解,估計 MS 位置 pˆ 如下式(2.3), 其中 N 為基地台個數。
N i i i p r BS p p 1 2 min arg ˆ (2.3) 定義BSi所量測ri所形成區域Si如下式(2.4),以BSi為圓心量測值為半徑所形成區域 -40 -30 -20 -10 0 10 20 30 40 50 -40 -30 -20 -10 0 10 20 30 40 50 BS1 BS2 BS3 TOA1 TOA2 TOA3 MS p^
N i i i i iS
S
r
p
BS
p
S
1
(2.4) i BS 、BS 之間的距離符號如下式(2.5) j
2
2 j i j i j i ij BS BS X X Y Y B (2.5) 在之後討論常用到計算 NLOS 上限,在此先定義重疊距離b ij ij j i ij r r B b (2.6) 式(2.4)(2.5)(2.6)幾何意義如下圖 2.3,左邊深藍色圓內區域為S1,右邊淺藍色 圓內區域為S2,兩者交集區 S 為中間弧形區域,黑色線段B12為BS1、BS2之間的距離, 紅色線段即為弧形區域最大寬度b12,而紅色線段長度計算為深藍色線段加淺藍色線段 扣除黑色線段以式(2.6)表示即b12r1r2 B12。 圖 2.3 Si、B 、ij b 幾何示意圖 ij2.3 全面篩選
在式(2.3)已知估計 MS 的準則,而[1,2]定義 residual 如下式(2.7)
N p BS r residual N i i i
1 2 ˆ (2.7) N 包含 NLOS 如果選擇較少的量測值做定位,可能濾去 NLOS 如圖 2.4 所示四個基地台 與手機位置距離加上雜訊產生量測距離四個大圓其中第四個基地台存在 NLOS 偏差量b -10 -5 0 5 10 15 20 -6 -4 -2 0 2 4 6 S1 BS1 S2 BS2 b12 B12 r1 r2 BS2 r2 BS1S
1 r1 b12S
2 B12(綠色大圓),圖 2.4(a)把所有量測資訊一起考慮做定位則估計位置pˆ(黑色星號) 必會受 NLOS 影響(綠色大圓),如果排除 NLOS 部分(綠色大圓)如圖 2.4(b)則估計 位置pˆ(黑色星號)不受 NLOS 影響,圖 2.4(c)未排除 NLOS 所估計位置pˆ(黑色星 號)依然受 NLOS 影響,而在基地台個數相同時如圖 2.4(b)、(c),明顯可看出圖 2.4 (b)residual 會小於圖 2.4(c),這說明了 residual 小,可靠度越大,當基地台個數 N 越大誤差總合越大,故式(2.7)除 N 得平均誤差。 圖 2.4(a)考慮所有量測值 圖 2.4(b)排除 NLOS 的子集合 圖 2.4(c)未排除 NLOS 的子集合 圖 2.4 全面篩選說明圖 當 N 大於 3,任意 K(K 3)個 BS 為一組子集合Set 可以決定一組j pˆ 與j residual 如j 下式(2.8)、(2.9) -80 -60 -40 -20 0 20 40 60 80 100 120 -40 -20 0 20 40 60 80 100 120 TOA1 BS1 TOA2 BS2 TOA3 BS3 TOA4(NLOS) BS4 MS MS estimate BS 1 BS2 BS 3 BS4 MS p^ TOA1 TOA2 TOA3 TOA4 -80 -60 -40 -20 0 20 40 60 80 -40 -20 0 20 40 60 80 100 120 BS1 BS2 BS3 TOA 1 TOA3 p^ MS TOA 2 -80 -60 -40 -20 0 20 40 60 80 100 120 -20 0 20 40 60 80 100 120 BS2 BS3 MS p^ BS4 TOA2 TOA3 TOA4(NLOS)
j Set i i i p jr
BS
p
p
ˆ
arg
min
2 (2.8)
j Set i j i i jSet
of
size
p
BS
r
residual
j
2ˆ
(2.9) ,共可產生
N K N K C M 3 組候選點,利用這些候選點(pˆ 、j residual )j=1,...,M,由j jresidual 大小可降低 NLOS 所造成的影響如[1],此種方式主要依據當residual 小時直覺j
j
Set 可靠度越高,因為 NLOS 偏差量會造成估計位置偏差進而使 residual 增加,在[1]
中提到幾種方式: 1. 取 residual 最小做為估計位置。 2. 以 residual 倒數做為權重計算估計位置如下式
M j j M j j j residual residual p p 1 1 1 1 ˆ ˆ (2.10)以 residual 倒數作為權重原因是當 residual 越小,直覺取到越多個 BS 是 LOS,可 靠度越高。
3. 根據 residual 大小排列,選取較小 residual 一部分候選點,已 residual 倒數做為 權重計算估計位置。
三種方式的優劣,在[1]已有詳細說明,在此不贅述。
第一種取 residual 最小做為估計位置的方式,再進一步討論,取 residual 最小做為估 計位置,這種方式有點類似 NLOS 檢測,差別在於其他 NLOS 檢測相關研究是根據事前 NLOS 統計特性做檢測,這裡使用 residual 做檢測,這種檢測方法是依據直覺上 LOS 所 產生 residual 很小,但是未必是最小,可能有另外一組候選點,有更小 residual,此 時便會造成 residual 最小估計位置偏離 MS,如圖 2.5 所示,圖 2.5(a)3 個基地台皆 為 LOS,但受雜訊影響,計算 residual(估計位置黑色星號到各圓周的誤差平方合)可
能會比圖 2.5(b)2 個 LOS、1 個 NLOS(綠色圓)所得 residual(估計位置黑色星號到 各圓周的誤差平方合)還要大,產生圖 2.5(b)明明受到 NLOS 影響但卻得到小的 residaul, 這是因為 2 LOS 交於兩點若 NLOS 圓周恰好落在非 MS 的點,便會產生誤判, 圖 2.5(a)3LOS 定位 圖 2.5(b)2LOS 1NLOS 定位 圖 2.5 全面篩選誤差小估計位置偏離 MS 說明圖 正確檢測機率,會受 BS 個數、雜訊、NLOS 偏差量影響,在第四章數學分析 4.5 節將會 以數學方式推導正確檢測機率,在電腦模擬 5.3.1 節,將會做驗證,為了降低誤判所造 成的效應,所以用 residual 倒數做權重平均應運而生。
2.4 加入限制式
LOS 量測值ri dini則 MS 落在圓周附近,若 NLOS 則ri di MS 落在圓內,假設交 -60 -40 -20 0 20 40 60 80 100 -60 -40 -20 0 20 40 60 80 100 TOA1 BS1 TOA2 BS2 TOA3 BS3 MS MS estimate BS1 BS2 BS 3 p^ MS TOA1 TOA2 TOA3 -40 -20 0 20 40 60 80 100 -40 -20 0 20 40 60 80 100 BS2 BS3 BS4 MS p^ TOA2 TOA3 TOA 4(NLOS)集區存在且 MS 落在交集區內即
N i i S S MS 1 ,但實際上所估計位置pˆ未必會落在交集 區內如下圖 2.6(a)所示,主要是受 NLOS 影響(綠色大圓)使的估計位置脫離交集區 S,圖 2.6(b)將估計位置pˆ限制在交集區 S 之後,明顯的估計位置會接近真實位置。 圖 2.6(a)估計位置pˆ未落在交集區 圖 2.6(b)限制pˆ在交集區 圖 2.6 加入限制式說明圖 但是由於雜訊影響對於 LOS 則無法確定是否在圓Si內,因為 LOS 可能因為雜訊的關 係使量測值落在此範圍 U i i i L i i n r d n d ( L i U i n n 為雜訊上下限),使得 MS 落在 LOS 圓外如圖 2.7 所示量測值為真實距離加上雜訊使得量測值上限為藍色圓半徑;下限則是 紫色圓半徑,在這上下限範圍內無法確保MSSi此條件恆成立,在不做 NLOS 檢測情況 -80 -60 -40 -20 0 20 40 60 80 100 120 -60 -40 -20 0 20 40 60 80 100 120 TOA1 BS1 TOA2 BS2 TOA3 BS3 TOA4(NLOS) BS4 MS MS estimate BS1 BS2 BS3 BS4 MS p^ TOA 2 TOA3 TOA1 TOA4(NLOS) -80 -60 -40 -20 0 20 40 60 80 100 120 -60 -40 -20 0 20 40 60 80 100 120 BS1 BS2 BS 3 BS4 MS p^ TOA 2 TOA 3 TOA 4(NLOS) TOA1 交集區
4 1 i i S S下,只好放大所有圓,以確保 MS 必定落在所有圓內。 圖 2.7 TOA(LOS)上下限示意圖 放大所有圓,如果放大過大,會造成限制式無用,過小又會使得 MS 並非落在所有Si 內,回到原始問題放大圓得目的是確保 MS 落在所有Si內,所以只要放大雜訊的下限, 即可解決此問題,但雜訊為高斯在區間,為了避免放大無窮,造成限制條件無用, 選擇-3i做為雜訊的下限,P
ni 3i
0.998,所以可以合理假設 L i i n 3 為雜訊 的下限。 如上述在[3]中,加入幾點限制式 1.根據定位的區域定義 X、Y 的上下限如下式
L L
U U
Y X Y X Y X , , , (2.11) 2.放大 TOA 所量測到的值,確保 MS 落在所有Si內 L i i i n d r (2.12) 3.由[3]所定義的 NLOS 上限可以對 NLOS 偏差量做限制
r r B
i N b b i j ij i j N j U i i , 1 min 0 , 1 (2.13)根據以上三個限制式並且引入 NLOS 偏差量bi變數,解非線性 Least square,轉換成最
佳化問題如下 -20 -15 -10 -5 0 5 10 15 20 -20 -15 -10 -5 0 5 10 15 20 LOS UB LOS LB BS MS d n L nU
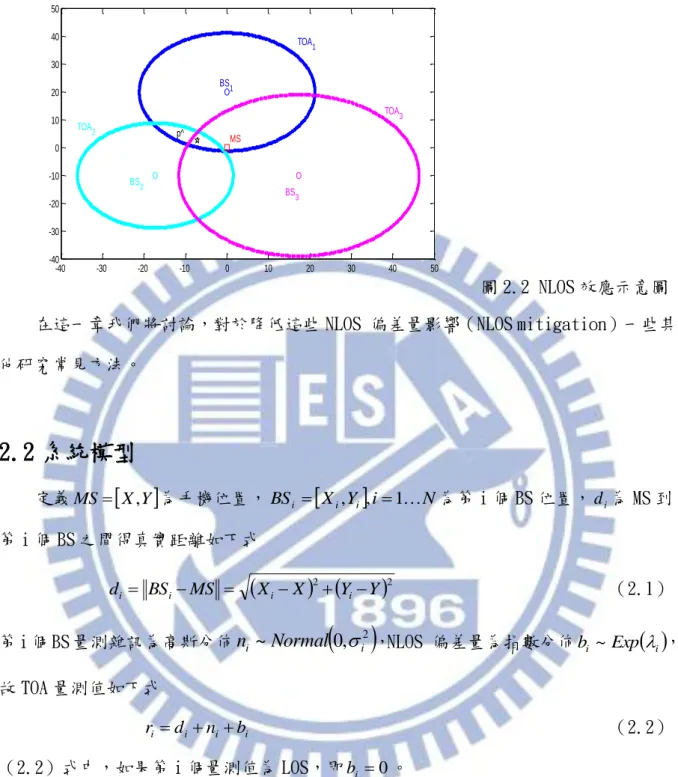
4 3 ... 5 2 , 4 2 ... 5 , 4 , 3 , 2 , 1 , ... 1 , 0 . . min arg min arg ˆ , , , 2 2 1 2 1 N N i b N N i b b N i y y N i x x N i y y N i x x N i n r y y x x g g t s r b p BS p b b b b p i U i i L L U U L i i i i i i N i i i i T N (2.14) 上式(2.14)可使用 SQP(sequential quadratic programming)演算法解此最佳化問 題利用 MATLAB 中 fmincon 指令可執行此演算法。 但此方式可能會產生一種情況當所有Si有交集區,導致pˆ非唯一解,在共同交集區 域 S 內,皆可產生任意一組,使得
0且滿足所有限制式gi如圖 2.8,A、B 兩點 在交集區 S 內,AB 可分別調整 NLOS 偏差向量bA、bB使
0以 A 點為例觀察深藍色 大圓可調整深藍色虛線線段bA1使得 BS1A bA1r1 0,其他顏色大圓搭配對應的虛 線線段可使誤差為 0,且各顏色的虛線線段皆低於 NLOS 上限使
A 0,同理 B 點也 可調整bB使
B 0,即在交集區域內任一點皆可調整 NLOS 偏差量 b,使
0, 也因為解可能會非唯一在利用 SQP 解最佳化問題式(2.14)時,當非唯一解情況發生時 SQP 會根據初始點找到離初始點最近的解。圖 2.8 限制式非唯一解示意圖 式(2.14)雖然最後結果接近理想,但運算量過大,如果將(2.14)式問題再轉換 成線性的最佳化問題,可以降低運算複雜度如[4],針對di BSiMS 利用泰勒展開式 展開點po
xo,yo
做線性近似的動作如下其中di
po BSi po ) ( ) ( ) ( ) ( ) ( o o i i o o o i i o o i i y y p d y y x x p d x x p d d (2.15) 另一方面為了使問題再簡化,不去估計 NLOS 偏差量,那非線性最佳化問題(2.14) 式可透過泰勒展開(2.15)簡化成下式(2.16),大幅降低運算複雜度,但由於(2.15) 近似動作,會使最後誤差比非線性最佳化問題還要大。
1 1 1 1 1 1 1 1 1 1 1 2 1 1 1 1 2 , 4 , 0 3 , 0 2 , 0 1 , 0 ... 1 , 0 . . min arg ˆ N o o N o o o N o o i N o o i o o o i o o i i o o o o o o o N o N N o o N N o o i i o o i i o o o o o L L U U L i i o o i i o o o i i o o i i p y p d y y x p d x x p d r y p d y y x p d x x p d r y p d y y x p d x x p d r R p d y y p d x x p d y y p d x x p d y y p d x x A N i y y N i x x N i y y N i x x N i n r y y p d y y x x p d x x p d g t s R Ap p (2.16) -50 0 50 100 -50 0 50 100 TOA1 BS1 TOA2 BS2 TOA3 BS3 TOA4 BS4 A bA1 bA2 bA3 Ba4 B bA1 bA2 bA3 bA4 A B TOA2 TOA3 TOA1 TOA4 BS1 BS 2 BS3 BS 4在本論文,為了降低加入限制式方式的運算複雜度,主要採用移除部分量測資訊取 代線性化的降低運算複雜度。
2.5 最大概似函數(Maximum Likelihood)
在許多關於手機定位研究假設事先已知雜訊與 NLOS 統計資訊,有這些資訊可以做 NLOS 檢測[15,16,17]或降低 NLOS 效應 [3]。在此針對 NLOS 效應降低做討論。
在[3]中根據資訊量的多寡,調整目標函數(object function),解最佳化問題, 在此目標函數即為概似函數(likelihood function)。 在 2.2 節系統模型中,已知 LOS 為高斯機率分佈,NLOS 為高斯加指數機率分佈 i i i b n 可推得i的 PDF 並且由一、二階動差可做高斯近[7]似如下式(2.17)
2 2
2 2 , 2 2 1 exp 2 1 i i i i i i i i i i i i i N erfc P i (2.17) 在 5.2 節將會以電腦模擬觀察式(2.17)近似過後與真實機率分佈的落差。2.5.1 已知 NLOS 發生機率、
i、
i已知這些資訊,BSi雜訊加NLOS 偏差量bi機率可根據全機率定理(Law of Total
Probability)寫成下式,其中PLOS為LOS發生機率
i
i i iP P P P Pi LOS n 1 LOS (2.18) 可得概似函數(likelihood function)如下式
i N i N i i r p P P p r P
1 1 ln (2.19) 已上式(2.18)做為目標函數(Object function),找最大值如下式
r p
p p argmax ˆ (2.20)2.5.2 已知 NLOS 發生機率、
i 此種情況,雖然已知 NLOS 偏差量為指數分佈,但未知i,修改式(2.20)如下式 (2.21)。
b
b
i N
p r p p b 1 , , max arg ˆ (2.21) 在式(2.21)發現除了要估計位置以外,連帶也要一起估計 NLOS 偏差量,使運算度增 加。第三章
檢測法提高精確度
3.1 動機
對於 NLOS 效應減輕方法,無法事先得知 NLOS 統計性質並未做 NLOS 檢測動作,所 以將所有量測值納入考量,針對全面篩選方法會有兩問題:第一包含 NLOS 所估計位置 雖然權重較低但仍會影響最後加權平均結果;第二隨著基地台個數 N 上升估計位置次數
會接近 N
2 ,而對於加入限制式方式隨著基地台個數 N 上升,SQP 演算法運算量也會提高, 如果不需要 NLOS 統計性質而作簡易 NLOS 檢測排除某部分 NLOS,可以改善上述問題,進 一步提高準確度而且排除部分量測值也可降低運算複雜度。
本論文所提出方式如圖 1.3 所描述,第一步驟利用檢測法排列出 NLOS 可能性大小, 檢測值越大者 NLOS 可能性越大,第二步驟選擇性移除部分量測值,移除過少可能無法 移除所有 NLOS,這點可以後續第三步驟改善但對於運算複雜度無明顯降低,移除過多運 算複雜度會明顯降低但可能造成 LOS 誤判為 NLOS 使最後結果比未移除 NLOS 還差,在第 五章電腦模擬將會以模擬方式討論移除個數對於最後的影響,第三步驟在過濾部分 NLOS 後再套用第二章的演算法,在對剩餘量測值做 NLOS 效應減輕的定位演算法,若將圖 1.3 再做細部分類如下圖 3.1 所示,得到量測值與基地台位置,先做檢測的動作,本論文提 出三種檢測方式,分別為直接檢測、上限檢測與餘差檢測,藉由檢測的結果做排序與移 除動作,移除部分量測資訊後,再搭配第二章所提的 NLOS 效應降低的定位演算法做最 後定位的動作。
圖 3.1 NLOS 處理流程
由於 NLOS 比 LOS 量測多出bi的距離,此距離會使的量測值、NLOS 上限、NLOS 偏
差量增加,以這三者為基準,由大排列到小,越大者可合理認為 NLOS 可能性越大,在 彈性選擇要保留多少 BS 在做運算動作。 本論文所提的三種檢測法,是以不同方式去估計bi,估計完所有bi即為檢測值按照 估計的bi越大者 NLOS 可能性越大:直接檢測,是利用每一個基地台所量測值做為參考 依據,上限檢測是利用兩兩基地台所量測到的資訊以及該基地台位置計算 NLOS 上限做 為檢測值,餘差檢測則是利用所有基地台所量測到的資訊與所有基地台位置計算 NLOS 偏差量,如下圖 3.2 所示以BS1做說明,直接檢測的檢測值即為BS1量測值(綠色虛線 線段)r1,上限檢測的檢測值為BS1與另一基地台所計算 NLOS 上限得之(黑色虛線線段) 12 b 、b13,餘差檢測則是所有基地台決定一位置pˆ再由此位置推算檢測值(紅色虛線線 段)r1 BS1pˆ 。 所有基地台位置與量測值 直接檢測 上限檢測 餘差檢測 排序與移除 全面篩選 加入限制式 最大概似函數
圖 3.2 三種檢測法示意圖
3.2 直接檢測
LOS(line-of-sight)量測值為真實距離加上高斯雜訊,而 NLOS 量測值除了距離 雜訊外,還有額外 NLOS 偏差量bi 0,而此偏差量會造成量測值增加,反過來如果量測 值大可推測 NLOS 偏差量大即 NLOS 可能性大。 假設在每個 BS 距離 MS 的真實距離差異不大時不考慮雜訊,可以合理推測量測值較 大就比較有可能是 NLOS 如圖 3.3 以及式(3.1),圖 3.3 MS 到兩個 BS 距離相同,但TOA1 深藍色的圓發生 NLOS 產生 NLOS 偏差量(黑色線段長度)b1,使得深藍色圓半徑大於淺 藍色圓半徑即r1r2,r1為 NLOS 可能性較大。 圖 3.3 直接檢測示意圖 -25 -20 -15 -10 -5 0 5 10 15 20 25 -20 -15 -10 -5 0 5 10 15 20 25 TOA1 BS1 TOA2 BS2 TOA3 BS3 MS estimate b13 b12 r1 r1-||BS1-MS estimate || MS estimate BS1 BS3 r1 TOA1 TOA2 TOA3 b12 BS2 b13 -20 -10 0 10 20 30 40 -20 -15 -10 -5 0 5 10 15 20 TOA1(NLOS) BS1 TOA2(LOS) BS2 MS b1 MS b1 BS1 TOA1 BS2 TOA2
2 1 2 1 2 2 1 1 1 1 . 3 r r d d d r b d r 直接檢測根據量測值大小,排列 NLOS 可能性,量測值越大 NLOS 可能性越大,應該 排除的優先權越大,而要排除多少個 NLOS,可以視情況改變,排除越多運算複雜度越低, 但排除越多 LOS 亦可能被排除使結果會變得不精準。 當 NLOS 的 BS 距離 MS 近時,容易產生誤判,換言之當第 i 個的 BS 為 NLOS,但 j i i b d d ,即會誤判如圖 3.4 MS 靠近BS1若深藍色圓半徑(真實距離加黑色線段) 1 1 1 d b r 小於淺藍色圓半徑d2則發生誤判即d1b1 d2。 圖 3.4 直接檢測誤判示意圖 由上圖 3.4 可知當 NLOS BS 的量測值(深藍色圓半徑)r1d1b1小於其他 LOS BS 的量測值(淺藍色圓半徑)r2 d2,會產生誤判,為了降低誤判發生有兩種解決方式, 第一在排列優先順序時,選擇移除較少 BS 個數,將優先權大移除,保留多一點 BS 可降 低將 LOS 被排除機率;第二是採用上限檢測或餘差檢測。 在 4.1 節將會對直接檢測做數學分析,並在 5.2 節以電腦模擬分析實際檢測正確率 與模擬正確率之間落差。3.3 上限檢測
在 2.4 節加入限制式中已討論 MS 落在 S 交集區內,當
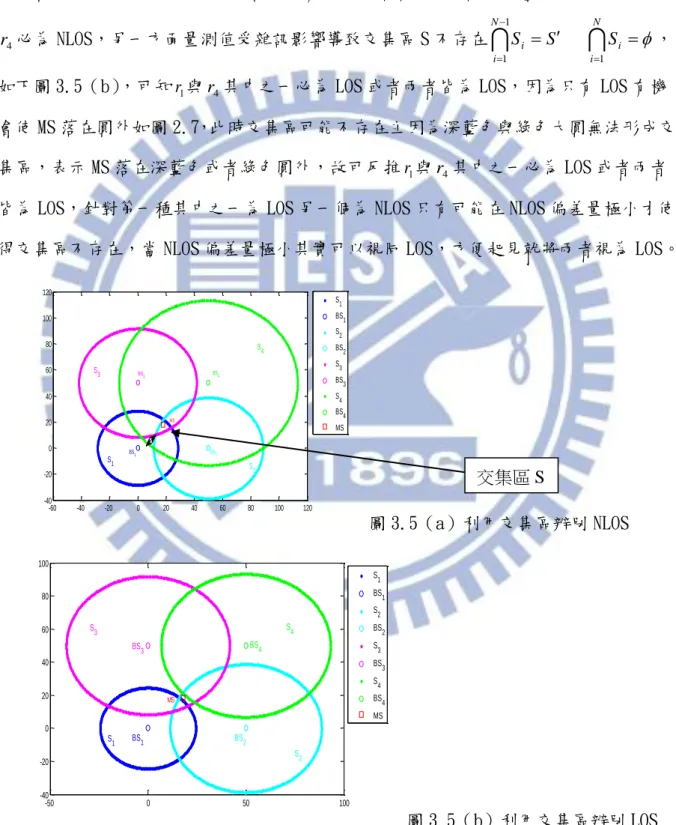
N i i N i i S S S 1 1 1 ,如下圖 3.5 -20 -10 0 10 20 30 40 -20 -15 -10 -5 0 5 10 15 20 TOA1(NLOS) BS1 TOA2(LOS) BS2 MS b1 BS 1 TOA1(NLOS) BS2 TOA2(LOS) MS b 1(a)所示可看出 MS 落在交集區 S 內且r BS p S p 4 4 min 即綠色圓移除並不會影響到交 集區 S 大小,這表示在 S 區域內任何一點都與r4有一段落差(黑色雙箭號),先前已討 論過 LOS 情況下 MS 落在圓周附近,而 NLOS 情況 MS 會落在圓周內,交集區 S 明顯落在 綠色圓內且交集區 S 最靠近綠色圓周也有一段明顯落差,這落差是b4所造成故可以肯定 4 r 必為 NLOS,另一方面量測值受雜訊影響導致交集區 S 不存在
N i i N i i S S S 1 1 1 ,如下圖 3.5(b),可知r1與r4其中之一必為 LOS 或者兩者皆為 LOS,因為只有 LOS 有機
會使 MS 落在圓外如圖 2.7,此時交集區可能不存在主因為深藍色與綠色大圓無法形成交
集區,表示 MS 落在深藍色或者綠色圓外,故可反推r1與r4其中之一必為 LOS 或者兩者
皆為 LOS,針對第一種其中之一為 LOS 另一個為 NLOS 只有可能在 NLOS 偏差量極小才使 得交集區不存在,當 NLOS 偏差量極小其實可以視同 LOS,方便起見就將兩者視為 LOS。
圖 3.5(a)利用交集區辨別 NLOS 圖 3.5(b)利用交集區辨別 LOS 圖 3.5 利用交集區判別 NLOS/LOS -60 -40 -20 0 20 40 60 80 100 120 -40 -20 0 20 40 60 80 100 120 S1 BS1 S2 BS2 S3 BS3 S4 BS4 MS BS 1 BS2 BS3 BS4 MS S2 S1 S3 S4 -50 0 50 100 -40 -20 0 20 40 60 80 100 S1 BS1 S2 BS2 S3 BS3 S4 BS4 MS BS1 BS2 BS3 BS4 MS S1 S2 S3 S4 交集區 S
但實際上由於這兩項判斷需要決定交集區 S,S 形狀不規則,甚至可能不存在,為
了避免此問題所以在[22,23,24]中只考慮兩兩的交集區Sij Si Sj,簡易檢測 LOS、
NLOS 方法,當任兩 TOA 沒有相交,該兩個 BS 為 LOS 如圖 3.6(a)S1S2 原因如同
圖 3.5(b);當一個 TOA 將另一個 TOA 覆蓋S1S2 S2,較大的 TOA(S1)必為 NLOS,
且可確定 NLOS 的下限如圖 3.6(b)(黑色雙鍵號)原因如同圖 3.5(a)交集區即為淺
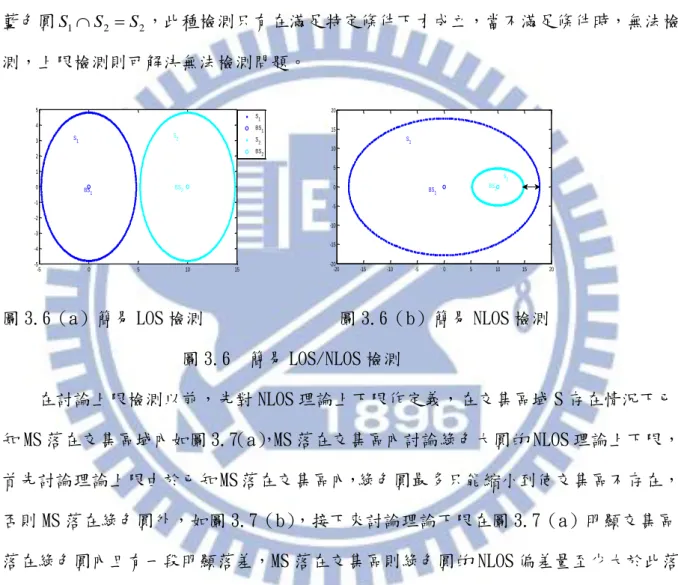
藍色圓S1S2 S2,此種檢測只有在滿足特定條件下才成立,當不滿足條件時,無法檢
測,上限檢測則可解決無法檢測問題。
圖 3.6(a)簡易 LOS 檢測 圖 3.6(b)簡易 NLOS 檢測 圖 3.6 簡易 LOS/NLOS 檢測 在討論上限檢測以前,先對 NLOS 理論上下限作定義,在交集區域 S 存在情況下已 知 MS 落在交集區域內如圖 3.7(a),MS 落在交集區內討論綠色大圓的 NLOS 理論上下限, 首先討論理論上限由於已知 MS 落在交集區內,綠色圓最多只能縮小到使交集區不存在, 否則 MS 落在綠色圓外,如圖 3.7(b),接下來討論理論下限在圖 3.7(a)明顯交集區 落在綠色圓內且有一段明顯落差,MS 落在交集區則綠色圓的 NLOS 偏差量至少大於此落 差,如圖 3.7(c)綠色圓至少可以縮小到一定程度而不影響交集區大小,而由交集區域 可以推得 NLOS 理論上下限如下式(3.2),簡單來說 U i bˆ 為在交集區 S 找距離BSi最近的 點並計算距離,若ri扣除 U i bˆ 則交集區 S 會不存在如圖 3.7(b),而 L i bˆ 就是在交集區找距 離BSi最遠的點並計算距離,若ri扣除 L i bˆ 則交集區會變小,此時便不保證 MS 依然落在交 集區 S 內如圖 3.7(c)。 -5 0 5 10 15 -5 -4 -3 -2 -1 0 1 2 3 4 5 S1 BS1 S2 BS2 BS2 BS1 S1 S2 -20 -15 -10 -5 0 5 10 15 20 -20 -15 -10 -5 0 5 10 15 20 BS1 S1 BS2 S2
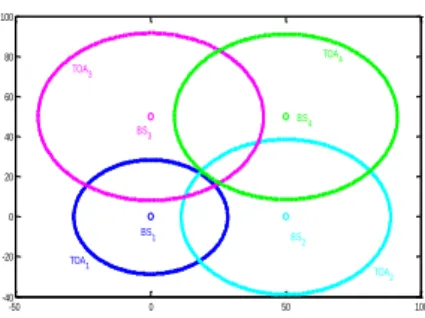
圖 3.7(a)交集區與 NLOS 落差 圖 3.7(b)利用交集區找 NLOS 理論上限
圖 3.7(c)利用交集區找 NLOS 理論下限 圖 3.7 利用交集區找 NLOS 理論上下限
U i i i S p i L i L i i i S p i U i d r p BS r b d r p BS r b S p max ˆ 2 . 3 min ˆ 如同 3.2 節所敘述 NLOS 會使量測值額外多出 NLOS 偏差量,這偏差量不僅會造成 量測值過大,另一方面也會使 NLOS 理論上限變大,而在式(3.2)由於交集區 S 形狀不 規則要找 U i bˆ 不容易所以簡化問題在只考慮Sij Si Sj,以S12取代式(3.2)的 S 可整 理得式(3.3),在交集區內找p
BS p
S p 1 12 min arg ' 也就是在S2圓周上找離BS1最近的點, 該距離即為 BS1BS2 r2幾何意義如下圖 3.8 在交集區上找離BS1最近的點 'p (紅色 黑色線段交界處), 'p 點到BS1距離為黑色線段長度即為 BS1BS2 r2而
BS p
r b S p U 1 1 1 12 min (紅色線段長度),故S12可決定一個 NLOS 簡易上限,再由所有簡 易上限挑選最小值,這就是[3]所定義的 NLOS 上限。 -60 -40 -20 0 20 40 60 80 100 120 -40 -20 0 20 40 60 80 100 120 TOA 1 BS1 TOA2 BS 2 TOA3 BS 3 TOA4 BS4 BS1 BS2 BS3 BS4 S TOA 1 TOA2 TOA3 TOA4 -50 0 50 100 -40 -20 0 20 40 60 80 100 TOA1 TOA2 TOA3 TOA4 BS1 BS2 BS3 BS4 -60 -40 -20 0 20 40 60 80 100 120 -40 -20 0 20 40 60 80 100 120 BS1 BS3 BS4 TOA1 TOA2 TOA3 TOA4 S BS2
12 12 2 1 2 2 1 1 1 1 1 1 2 min b B r r r BS BS r p BS r b S p U (3.3) 圖 3.8 NLOS 簡易上限示意圖(基地台個數 2) NLOS 簡易上限可以簡易計算得到如下式(3.4)
r r B j N j i
i N biU min i j ij, 1 , , 1 (3.4) ,式(3.4)計算 i 個 NLOS 簡易上限是先計算 i、j 兩圓重疊區域最長線段長度b ,在ij 求最短線段作為 NLOS 簡易上限。 式(3.2)與式(3.4)所計算 NLOS 簡易上限幾何意義如下圖 3.9 所示, 圖 3.9 NLOS 理論與簡易上限示意圖 -10 -5 0 5 10 15 20 -6 -4 -2 0 2 4 6 TOA 1 BS 1 TOA2 BS2 b 12 B 12 r1 r 2 B 12-r2 TOA2 TOA1 r1 r 2 BS 1 B12 BS2 b 12 B 12-r2 p' -25 -20 -15 -10 -5 0 5 10 15 20 25 -20 -15 -10 -5 0 5 10 15 20 BS 1 BS2 BS3 b 12 b13 U bˆ1不考慮雜訊可確定 MS 落在三個圓之內,考慮理論上限 U bˆ 根據式(3.2)得到如圖 3.91 藍色線段理論上限 U bˆ ,由於確定 MS 落在交集區內若1 BS1量測值r 扣除藍色線段長度1 bˆ1U 將會使交集區 S 不存在;另外由式(3.4)可計算b NLOS 上限如式(3.5) ij
23 23 13 3 23 23 12 2 12 13 12 1 23 3 2 23 13 3 1 13 12 2 1 12 min min min b b b b b b b b b b b b B r r b B r r b B r r b U U U (3.5) ,BS1根據(3.5)式所計算的 NLOS 簡易上限b1 min
b12 b13
b12 U 為兩黑色線段(虛 線與實線最小值),由於確定 MS 落在交集區內若BS1量測值扣除黑色線段長度將會使交 集區不存在,例如扣除b12會使得S12 ;扣除b13會使得S13,所以兩黑色線段最小 值b1U min
b12 b13
b12, 1 BS 代表的 NLOS 簡易上限b1U。 式(3.5)與式(3.2)稍後會在 4.2 節做數學分析,並且在 5.1 節以電腦模擬觀察落差,在某些情況 NLOS 上限相當接近 NLOS 偏差量bi,上限檢測根據 NLOS 簡易上限大小排列
NLOS 優先順序,與直接檢測相同,排列出優先順序以後,可以彈性選擇保留多少個 BS 做定位的動作。 上限檢測可以做 NLOS 檢測,在於式(3.5)以簡易方式估計 NLOS 簡易上限,如圖 3.10, 圖 3.10 上限檢測示意圖(基地台個數 3) -25 -20 -15 -10 -5 0 5 10 15 20 25 -20 -15 -10 -5 0 5 10 15 20 TOA 1(NLOS) BS 1 TOA 2 BS2 TOA 3 BS 3 MS b 13 b 12 b 23 BS 1 BS2 BS 3 TOA 1 TOA2 TOA 3 b 13 b 12 b 23 MS
1 BS 是 NLOS 且由圖 3.10 可看出 U
U U U
b b b b1 max 1 2 3 ,故可以將 NLOS 檢測出來。另 外圖 3.10 與式(3.5)可看出 U U b b2 3 (綠色線段長度),當發生 NLOS 上限相同時,無 法判斷優先順序,則回到直接檢測根據量測值ri作優先權排序。 上限檢測與直接檢測相同,在某些情況也會有誤判發生,例如 LOS 的 BS 卻計算出 過大的 NLOS 簡易上限 U i b 如圖 3.11 所示b1U b2U b12 < b3U b13(黑色虛線長度小於黑 色實線),此時上限檢測判斷 NLOS 優先順序為BS3、BS2、BS1,會造成誤判主要原因 在於bi與b 之間的落差。 iU 圖 3.11 上限檢測誤判示意圖 但此種情況,隨著 N 上升,NLOS 上限 U b1 會接近 NLOS 偏差量,如下式(3.6)所示
, 1 , 1
min 1 , 1 , min 1 , 1 , min min 1 , 1 , min 1 1 1 1 j N j b j K N N j b j N j b j K N j b j j j j (3.6) 誤判機率會隨著降低。3.4 餘差檢測
由於上限檢測為計算 NLOS 簡易上限做為檢測值,但真實 NLOS 偏差量與簡易上限仍 -20 -15 -10 -5 0 5 10 15 20 25 -20 -15 -10 -5 0 5 10 15 20 25 30 TOA1 BS1 TOA2 BS2 TOA3 BS3 MS b 13 b12 b23 BS1 BS2 BS 3 TOA1 TOA2 TOA3 b23 b12 b13有落差,假設如果可以得知手機位置 MS 則可計算各基地台的餘差如下式(3.7)
nibi ri BSi MS ridi
(3.7) 但實際上 MS 是未知,以簡易方式先粗略估計一點pˆ如[5] ,在此採用將原本每一 個量測資訊所的區域Si,將Si由圓化成方型區域Si,取方形交集區域 S中心做為pˆ, 如下圖 3.12,三個圓變成三個方(圓在方形內),三個方型區域取交集得紅色虛線方形, 再取紅色虛線方形的中心紅色方形點作為估計位置。 圖 3.12 餘差檢測估計 pˆ 示意圖 此種估計pˆ有兩個優點,一方面運算簡單只需做加法運算即可得pˆ,另一方面pˆ必 定落在Sˆ區域內,與 2.4 節所提到方法限制 MS 落在 S 區域內,有相同效果可以降低 NLOS 效應,差別在於將原本 S 非線性的區域放鬆條件變成Sˆ線性區域。 再將估計位置代入式(3.7)可估計 NLOS 偏差量如式(3.8),可得到餘差, p BS r bi i i ˆ
(3.8) 當餘差越大者則 NLOS 可能性越大,優先權越高如圖 3.13,估計位置後pˆ代入式(3.8), 所得到的餘差,分別為r1 BS1 pˆ (藍色)、r2 BS2 pˆ(淺藍色)與r3 BS3 pˆ(綠 色)線段,又以藍色線段長度最長,也就是BS 檢測值最大,故推測1 BS 為 NLOS 可能性1 最大。 -25 -20 -15 -10 -5 0 5 10 15 20 25 -20 -15 -10 -5 0 5 10 15 20 25 S1 BS1 S2 BS2 S3 BS3 S'1 S'2 S'3 S' MS estimate BS2 BS3 BS1 S1 S'1 S2 S'2 S3 S'3 S S'
圖 3.13 餘差檢測示意圖 與上限檢測相同,當基地台個數 N 越大檢測效果越佳,這是因為當 N 提高 S交集區 縮小,此時估計pˆ會越接近真實 MS。 而餘差檢測也會有發生錯誤情況如下圖 3.14 所示,估計位置pˆ後,計算餘差,BS1 為 NLOS 但卻得到較小的餘差(藍色直線線段),主要原因是在估計pˆ與 MS 落差過大。 圖 3.14 餘差檢測誤判示意圖 在最後對於三種檢測法做總結,如下表 3.1 -40 -30 -20 -10 0 10 20 30 -30 -20 -10 0 10 20 30 MS p^ BS 1 BS2 BS 3 -25 -20 -15 -10 -5 0 5 10 15 20 25 -20 -15 -10 -5 0 5 10 15 20 25 30 MS BS 1 BS2 BS3
檢測法 檢測值計算 檢測值與bi落差原因 N 提高的影響 直接檢測 ri di bi ni 受di影響 無 上限檢測
ij j i i j U i r r B b min i b 與 U i b 落差 bi與 U i b 落差降低 餘差檢測 r BS p i i ˆ MS 與pˆ落差 MS 與pˆ落差降低 表 3.1 三種檢測法比較表3.5 排序與移除
在 3.2-3.4 節已對三種檢測法說明,如圖 3.1 處理流程,接下來本節要介紹三種檢 測法得到檢測值以後如何做排序與移除動作,三種檢測法以不同方式估計 NLOS 偏差量, 且檢測值越大代表 NLOS 偏差量越大同時也暗示 NLOS 可能性越大,有基於此在檢測法得 到檢測值以後,檢測值越大者給優先權越高,再做移除時以優先權作為移除順序,如表 3.2 所示,優先權排序由檢測值大小決定,做完優先權排序動作,在選擇性移除多少量 測資訊第一種方式採移除所有基地台百分比,d30%為移除前百分之三十再取最小整數
N*30%
,d50%為移除前百分之五十再取最小整數
N*50%
,如表 3.2 基地台 檢測值 優先權 d30% d50% d d 2 BS 35 1 移除 移除 移除 移除 3 BS 26 2 保留 移除 保留 移除 4 BS 23 3 保留 保留 保留 保留 1 BS 22 4 保留 保留 保留 保留 5 BS 18 5 保留 保留 保留 保留 24.8 6.37 表 3.2 排序與移除範例 基地台個數 N=5,d30%移除優先權最高者,d50%移除優先權最高者與次高者,第二種方式依檢測數值計算平均值、標準差 ,計算門檻(threshold)大於門檻的檢測 值就做移除動作,如表 3.2 所示 d門檻為 31.17,則檢測值 35 大於門檻將會 被移除,而d 門檻為 則檢測值 35、26 大於門檻會被移除移除個數多,容易發生將 LOS 移除;移除少,會使 NLOS 無法完全移除,另外如果所有量測資訊皆為 NLOS,排序與移 除動作也會將較大 NLOS 偏差量的量測資訊移除,保留受 NLOS 影響較小的量測資訊在第 五章將會以電腦模擬觀察移除個數對檢測法與最後結果的影響。 最後由於至少需要三個基地台與量測資訊方能做定位,再做移除過程須確認,移除 過後保留的資訊是否能夠做定位,例如 N 為 4 則不管何種移除方式最多只能移除優先權 最高者。
3.6 全面篩選
在第二章已說明過[1]中對 NLOS 處理方式,但實際上按照 2.3 節計算方式,約略需 要計算 2 的 N 次方的候選點,如下式(3.9),
N K N N N N N N K C C C C 3 2 1 0 2 2 (3.9) 為了降低運算次數在[2]提出降低運算複雜度,流程如下 1. 在 N 個 BS 中任取三個 N C3 ,估計位置 pˆ 與餘差j residual 。找出餘差最小j residual0的組合Set0個數為 K=3 位置 ˆp0,並且令SetSet0。
2. 固定 Set ,再由剩餘 N-K 挑一個進入 Set N Set
SetC
C 1 估計計算位置pˆ 與餘差j residual 。找j
出餘差最小residuali的組合Seti個數為 K=K+1 位置pˆi,調整SetSeti。
3. 重複 2 的動作直到 K=N。此時 2 的動作會執行 N-2 次,會有 N- 1 組位置pˆi與residuali 在做加權平均。 這種方式可以將原本 2 的 N 次方估計位置次數大幅將低如式(3.10)所式。
N i N N i N C 4 3 2 (3.10)此種方式可以大幅降低運算次數,且效能只略差原始方法,此方式存在一缺點,一 旦第一步驟發生誤判取到 NLOS,後面所有的候選點都必定受 NLOS 影響。
且由於 NLOS 關係 residual 最小者未必皆為 LOS,且初始點 ˆp0所決定Set0,會影響
到第二步驟所決定的所有 Set,如果在決定Set0發生誤判情況發生如圖 2.5(b)則後續 所有pˆi皆會受 NLOS 影響,誤判情況將在 4.5 節做推導,如果利用檢測法先行排除 d 個 NLOS,可降低誤判發生機率,同時也可以再進一步降低運算次數。 綜合兩種降低運算次數,本論文在改善全面篩選方式首先先過濾 d 個 NLOS,如此可 以降低誤判發生機率,再搭配上述方式[2]運算複雜度大幅降低同時也降低了誤判發生 機率,運算次數降低如下式(3.11)。
N d i d N d N N i d N C 4 3 2 2 (3.11) 最後說明取 K 個量測資訊,如何估計位置方法,在第二章已知定位常用都是找最小 平方距離和(Least Square),目標函數如 2.3 節中式(2.8),共有 K 個非線性方程式 由於要計算式(3.11)次的位置,為了簡化每一次所估計位置的運算複雜度,將原本非 線性方程式做平方在新增一個變數 2 2 y x 如式(3.12)所示,
2
2 2 2 2 2 2 2 2x x y y x y x y r y y x x ri i i i i i i i (3.12) 式(3.12)式的動作,可將原本 K 個非線性方程式轉換成線性方程式,並且寫成矩 陣形式如式(3.13)所示。 3 * 1 1 1 * 2 2 2 1 1 * 3 2 2 1 2 2 1 2 2 1 2 2 A B K K K i i K K i y x y x y x r r r y x y x A B 其中 (3.13) 如此原本式(2.8)式非線性最小二乘方的問題轉為線性的最小二乘方問題如式 (3.14)即可求出 K 個量測資訊所決定的位置pˆ。
r BS p
p
A A A B p T T p K i i i p 1 2 1 2 Ap -B min arg ˆ min arg ˆ
(3.14) 在後面將會在 5.3 節以電腦模擬觀察加入檢測法對於全面篩選的影響。3.7 加入限制式
在 2.4 節加入限制式,線性限制式或者非線性限制式都是為了限制估計位置在 S 交 集區內如圖 3.15(a)交集區為
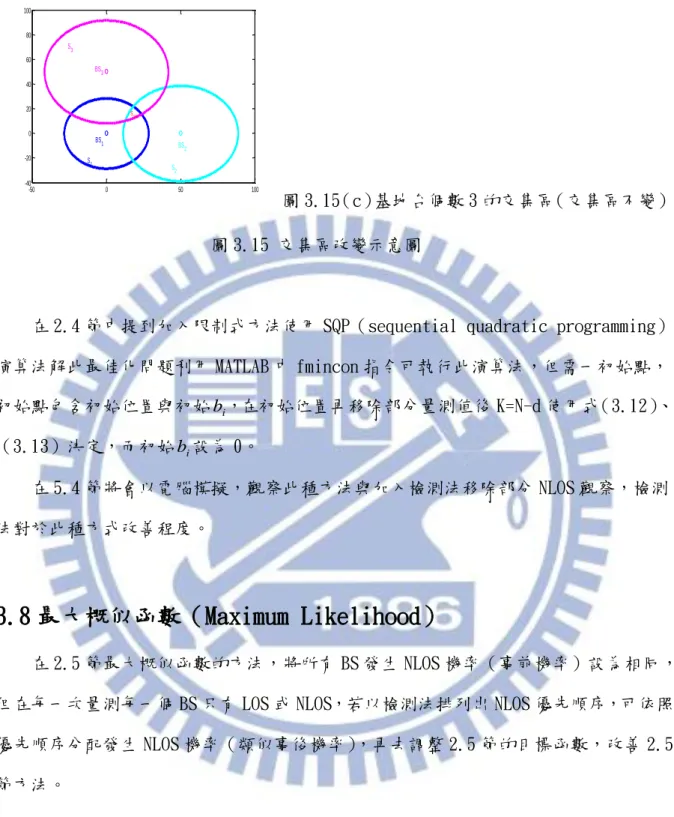
4 1 i i S S ,當 N 提高運算相當複雜,此時可利用檢測法 移除部分量測資訊降低運算複雜度。 移除部分量測資訊,S 交集區可能擴大,而交集區 S 的大小會間接影響到最後估計 位置pˆ,如圖 3.15(b)若移除BS1(深藍色圓)量測資訊,此時移除部分量測資訊雖 可降低運算複雜度,但也犧牲了定位精準性,因為交集區變大
4 2 4 1 234 i i i i S S S S , 若移除部分量測資訊後,S 交集區域相同,如圖 3.15(c)若移除BS4(綠色圓)量測 資訊,S 交集區相同
3 1 4 1 123 i i i i S S S S 則可以降低運算複雜度,又可維持準確性。 圖 3.15(a)基地台個數 4 的交集區 圖 3.15(b)基地台個數 3 的交集區(交集區變大) -60 -40 -20 0 20 40 60 80 100 120 -40 -20 0 20 40 60 80 100 120 S1 BS1 S2 BS2 S3 BS3 S4 BS4 S BS1 BS2 BS3 BS4 S1 S2 S3 S4 -60 -40 -20 0 20 40 60 80 100 120 -40 -20 0 20 40 60 80 100 120 S234 BS2 BS3 BS4 S2 S2 S3圖 3.15(c)基地台個數 3 的交集區(交集區不變) 圖 3.15 交集區改變示意圖
在 2.4 節中提到加入限制式方法使用 SQP(sequential quadratic programming) 演算法解此最佳化問題利用 MATLAB 中 fmincon 指令可執行此演算法,但需一初始點, 初始點包含初始位置與初始bi,在初始位置再移除部分量測值後 K=N-d 使用式(3.12)、 (3.13)決定,而初始bi設為 0。 在 5.4 節將會以電腦模擬,觀察此種方法與加入檢測法移除部分 NLOS 觀察,檢測 法對於此種方式改善程度。
3.8 最大概似函數(Maximum Likelihood)
在 2.5 節最大概似函數的方法,將所有 BS 發生 NLOS 機率(事前機率)設為相同, 但在每一次量測每一個 BS 只有 LOS 或 NLOS,若以檢測法排列出 NLOS 優先順序,可依照優先順序分配發生 NLOS 機率(類似事後機率),再去調整 2.5 節的目標函數,改善 2.5 節方法。 假設已知發生 NLOS 機率(事前機率)為 0.4,而在某一次量測每一個 BS 為 LOS 或 NLOS,若能正確檢測出 LOS/NLOS 發生機率 0 或者 1 調整目標函數,結果是最理想 ML 最 後估計誤差會接近 CRLB,而實際上幾乎不可能正確檢測出,但至少可根據檢測法優先權 高的給與較大 NLOS 機率,如下表 3.3 當檢測法做完檢測排序完優先順序後,按照優先 權給予事後機率,優先權最高 1 給予最大的事後機率,依序調整事後機率 -50 0 50 100 -40 -20 0 20 40 60 80 100 BS1 BS2 BS3 S2 S1 S3 S123
事前機率 PNLOS 優先權 1 事後機率 1 優先權 2 事後機率 2 1 BS 0.4 NLOS(1) 1 0.8 4 0.3 2 BS 0.4 NLOS(1) 2 0.6 3 0.1 3 BS 0.4 LOS (0) 3 0.3 2 0.6 4 BS 0.4 LOS (0) 4 0.1 1 0.8 表 3.3 調整 NLOS 機率說明 表 3.3 檢測法所決定機率 1 比事前機率更接近此次 NLOS 發生機率,以此種改變 NLOS 發 生機率會比原始方法佳,但有時也檢測法可能會產生誤判在分配機率如檢測法決定機率 2,此時事前機率比檢測法所決定機率 2 更接近此次 NLOS 發生機率,效果較差。 本論文調整事後機率的方式如下,首先按照檢測法所計算的檢測值,如 3.5 節所述 檢測值越大優先權越高作優先權排序,若已知 NLOS 發生機率與 BS 個數,則可以計算平 均 NLOS 個數再取最小整數如下式(3.15), 利用檢測法所排列出優先順序 1、2、…、
N,在優先順序前NLOSave_num個給予事後機率為 1,剩餘的不調整給予事前機率PNLOS,
P N
NLOSave_num NLOS* (3.15)
舉例如果 N=5、PNLOS為 0.2 則NLOSave_num1,優先權最高的 BS 給予事後機率 1,其他
為 0.2,如下表 3.4。 BS 事前機率 檢測值 優先順序 事後機率 BS1 0.2 5 5 0.2 BS2 0.2 33 1 1 BS3 0.2 22 3 0.2 BS4 0.2 28 2 0.2 BS5 0.2 13 4 0.2 表 3.4 調整 NLOS 機率範例 在 5.5 節將會以電腦模擬觀察,ML 與加入檢測法調整事後機率改善 RMSE 程度,而
在執行 ML 運算所需i的與真實距離di相關,而實際上無法得到真實距離di,為了方便
![圖 2.8 限制式非唯一解示意圖 式(2.14)雖然最後結果接近理想,但運算量過大,如果將(2.14)式問題再轉換 成線性的最佳化問題,可以降低運算複雜度如[4],針對 d i BS i MS 利用泰勒展開式 展開點 p o x o , y o 做線性近似的動作如下其中 d i po BS i p o ) ) ()()()(( o oi ioooiiooii y ypdyxypxdxpxdd (2.15) 另一方面為了使問題再簡化,不去估計 NLO](https://thumb-ap.123doks.com/thumbv2/9libinfo/8710448.199946/25.892.134.802.114.1137/唯一解示低運算複雜度針對展開點o另一方面為.webp)