1
使用三維網格以結構化雷
使用三維網格以結構化雷
射掃點雲資料暨霍夫轉換
射掃點雲資料暨霍夫轉換
以分面之研究
以分面之研究
指導教授:趙鍵哲 老師
學生:黃國彥
綱要
.前言及文獻回顧
.原理
.實例
.結論與後續目標
﹒參考文獻
3
一﹒前言及文獻回顧
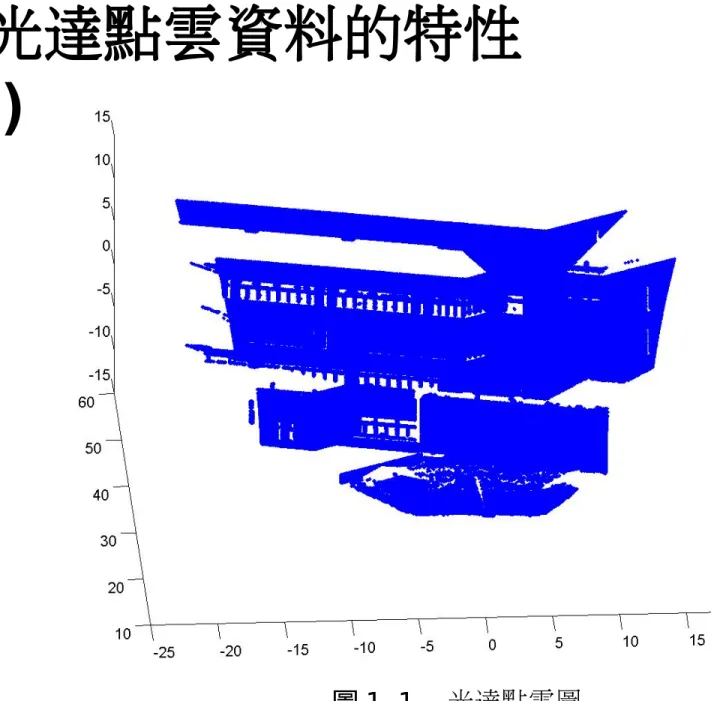
.光達點雲資料的特性
龐大且離散的點數
.光達點雲資料的結構化
Pseudo-Grid 、三維網格
.光達點雲資料的分面
區域成長法、八分樹法
、 PolyWork.光達點雲資料的特性
(1)
5
.光達點雲資料結構化
(1)
圖 1.2 Pseudo-Grid 示意圖 [Cho W et al., 2004]
.光達點雲資料結構化
(2)
圖 1.3 點雲資料三維網格切割示意 圖
7
.光達點雲資料的分面
(1)
交會 3D 線段 合併 掃瞄點雲原始資料 離散點 剔除 點屬性表 向量、距離 區塊成長 人工指定 相鄰關係檔 區塊 1 區塊 區塊 2 …… 平面 1 初步平面 平面 2 …… 向量、距離 合併 向量、距離 平面 1 最終平面 平面 2 …… 圖 1.4 光達資料結構化流程圖 [Lin and Jaw, 2003].光達點雲資料的分面
(2)
圖 1.5 四分樹範例示意圖 (a) 資料點分布及樹狀結構示意圖
9
.光達點雲資料的分面
(3)
二﹒理論
.光達點雲三維網格結構化
.以三維網格結構搜尋初始值
.以霍夫轉換取得共面點資訊
11
2.1 光達點雲三維網格結構化
.子網格提供的資訊
位相關係
光達點的資訊
( 1﹐1﹐1 ) ( 1﹐2﹐1 ) ( 2﹐1﹐1 ) ( 2﹐2﹐1 ) ( 1﹐1﹐2 ) ( 1﹐2﹐2 ) ( 2﹐1﹐2 ) ( 2﹐2﹐2 ) 圖 2.1.1 子網格示意圖12
.光達點雲三維網格結構化流程圖
定義切割次數 讀取光達點雲資料 開始切割 Yes No 是否達切割停止條件? 停止切割 圖 2.1.2 三維網格結構化流程圖13
2.2 以三維網格結構搜尋起始值
.定義目標網格
至少需含有一個或以上的光達點
.定義搜尋網格及搜尋方法
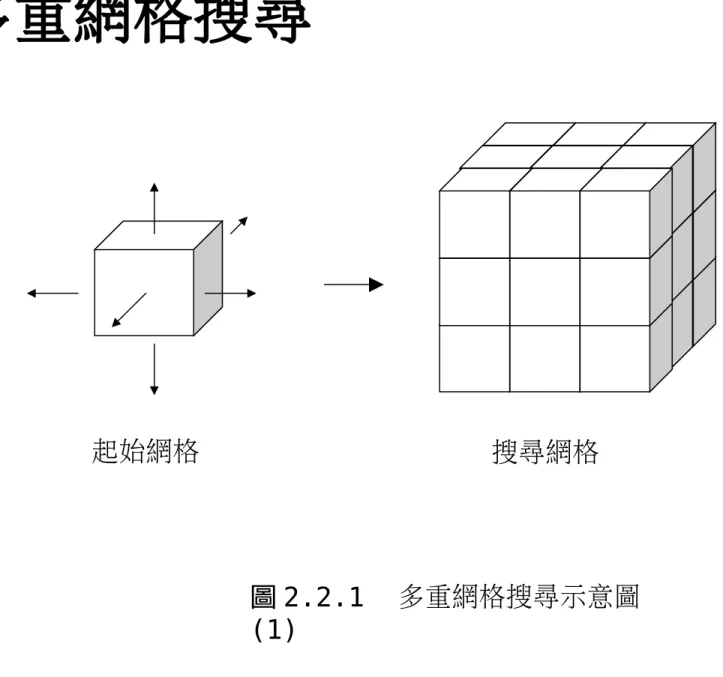
多重網格搜尋
目標與搜尋網格至少需含有三個或以上的光達點
網格中若有任意一點超過改正數門檻值則停止
.多重網格搜尋
起始網格 搜尋網格
圖 2.2.1 多重網格搜尋示意圖 (1)
15
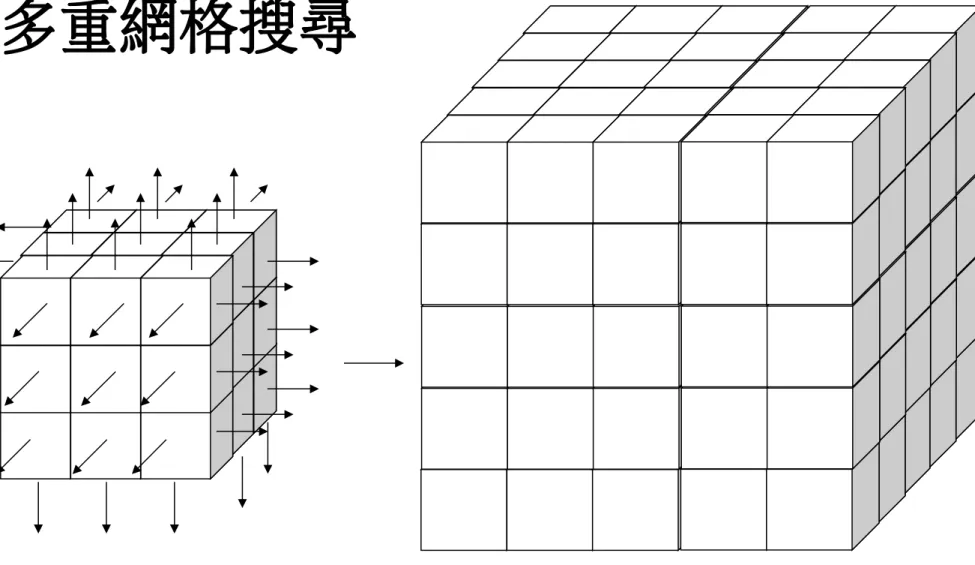
.多重網格搜尋
起始網格 搜尋網格
圖 2.2.2 多重網格搜尋示意圖 (2)
.多重網格搜尋流程圖
圖 2.2.3 多重網格搜尋流程圖 定義起始網格 讀取光達點雲與網格資料 No 是否所有光達點皆已處理? 光達點至面的距離是 否皆在門檻值內? 面擬合 定義搜尋網格範圍 Yes 下一次的起始網格變 更為此次的搜尋網格 判斷為共面點 Yes 霍夫轉換 No17
2.3 以霍夫轉換取得共面點資訊
.定義霍夫轉換前所代入之近似法向量
﹒判斷霍夫轉換後對應其法向量之點雲
.判斷霍夫轉換後重覆點所歸屬之平面
.定義轉換前所代入之近似法向量
(1)
…… 式 2.3.10
b
y
c
z
d
x
a
approximation approximation approximation2 2 2 ion approximat ion approximat ion approximat i ion approximat i ion approximat i ion approximat i
c
b
a
d
z
c
y
b
x
a
d
…… 式 2.3.219 Hough Transform
0
2 1 2 1 2 1
d
z
z
z
c
y
y
y
b
x
x
x
a
n unknown n ion approximat n ion approximat
n unknown unknown unknownc
c
c
, 2 , 1 ,
ion approximata
、b
approximation 、.定義轉換前所代入之近似法向量
(2)
Times
c
c
Times
ion approximat unknown
0
.
001
1
0
.
001
1
…… 式 2.3.3Times
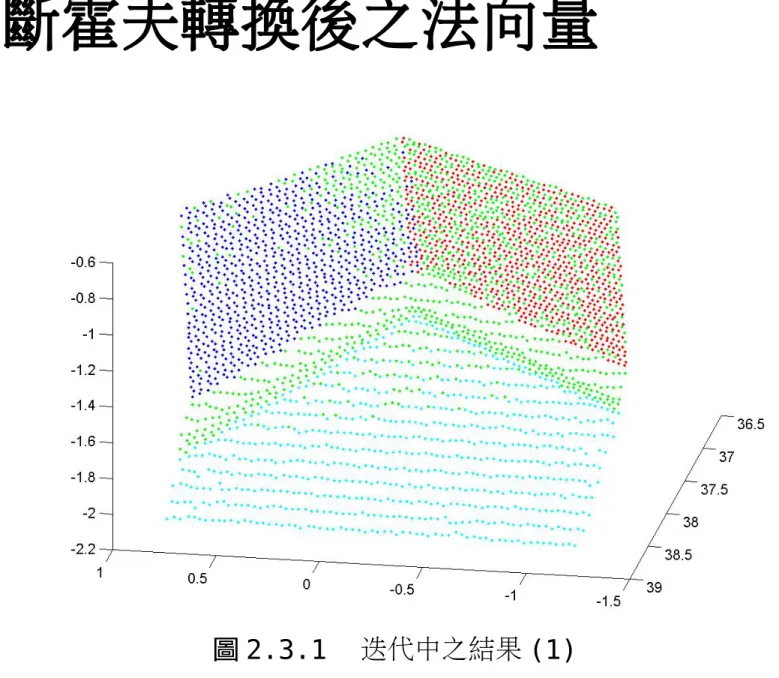
:迭代次數,初始值為 1.判斷霍夫轉換後之法向量
(1)
21
.判斷霍夫轉換後之法向量
(2)
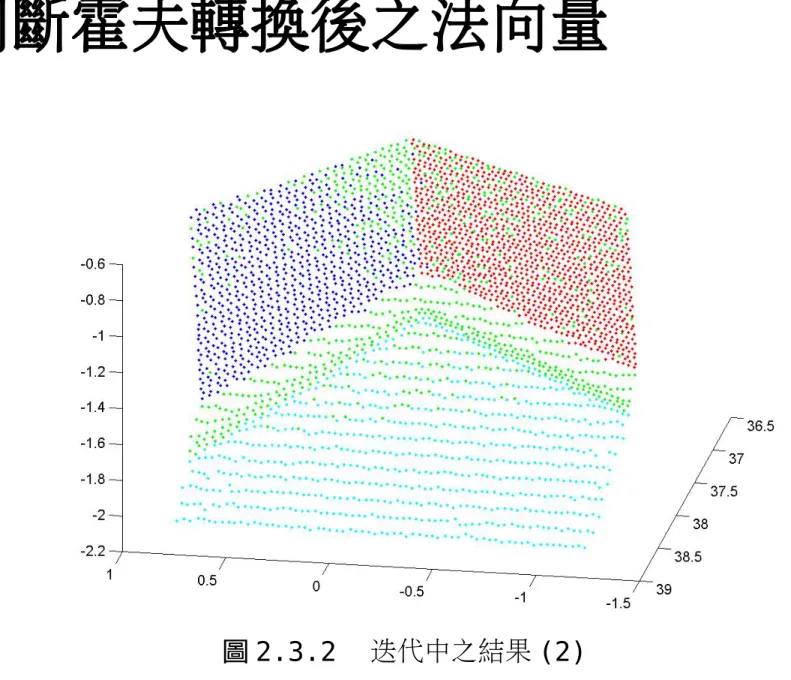
.判斷霍夫轉換後之法向量
(3)
23
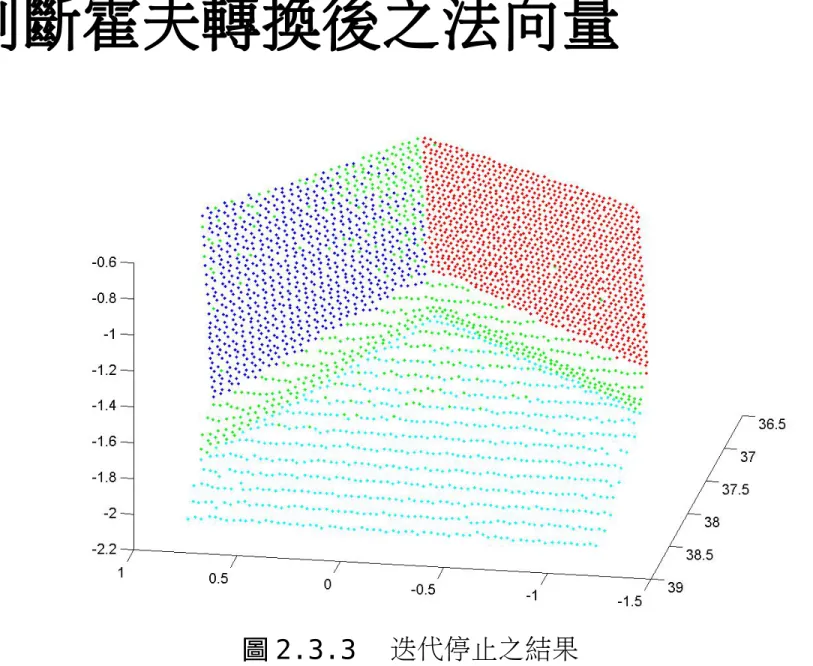
.判斷霍夫轉換後之法向量
(4)
24
.霍夫轉換分面流程圖
圖 2.3.4 霍夫轉換流程圖 過濾近似法向量 讀取光達點雲與近似法向量 是否所有近似法向 量皆已處理? 判斷法向量 及共面點 Yes No 霍夫轉換 完成 代入近似法向量 進行霍夫轉換25
.判斷轉換後重覆點歸屬之平面
(1)
圖 2.3.5 交線處點群的重覆判 定a
b
c
0
1
078307
.
0
26829
.
0
19119
.
0
0
1
074514
.
0
27129
.
0
41538
.
0
z
y
x
z
y
x
平面一 ( 紅 色 ) 平面二 ( 藍 色 ) 0.41538 -0.19119 -0.27129 -0.26829 0.074514 0.078307 表 2.3.1 模擬資料法向量設定資訊.判斷轉換後重覆點歸屬之平面
(2)
圖 2.3.6 二維平面的直線與判斷點 (2,2) 1 3 x yx
將判斷點之 座標代入線方程式中,得 ,換言之,若判斷點屬於該直線 ,則其座標為 (2,7) ,故知判斷點位於 直線的下方。 同理若將判斷點 座標代入線方程式中 ,可得 ,即判斷點位於直線的 右方。7
y
y
3
/
1
x
27
.判斷轉換後重覆點歸屬之平面
(3)
圖 2.3.5 交線處點群的重覆判 定 以三個軸向平面為例,定義藍色平面為標 準面、紅色平面為判斷面,並將資料座標 與解算聯立所得的座標 比較結果列於表 2.3.2 , -1 表原始座 標之 值較小;反之則為 1 : ) , , (x y z (x',y',z') 向 向 向 標 準 面 0 -1 -1 1 0 -1 1 1 0 判 斷 面 0 -1 -1 1 0 1 1 -1 0 表 2.3.2 比較結果y
x
z
28
.判定重覆點流程圖
圖 2.3.7 判定重覆點流程圖 判斷各面光達點重覆情況 讀取光達點雲與法向量 是否所有點與面皆處理? 計算重覆點、標準面、判斷面三者與交線的走向 Yes No 重覆點 分類完成 定義標準面及 判斷面 走向相同者視為同一平面29
三﹒實例
.實驗資料為成功大學圖書館側面的近景影像及地
面光達資料,所使用之地面雷射掃描儀為加拿大
Optech 公司所生產之 ILRIS-3D( 劉燈烈, 2004)
光達資料 1 點數
4742
光達資料 2 點數
8440
光達點先驗中誤差
表 3.1 雷射掃瞄儀資料與光達資料一點 數 ) 008 . 0 , 008 . 0 , 008 . 0 ( m m m三﹒實例
圖 3.1 測試區影像
實驗區二 實驗區一
31
.實際資料
1(1)
.實際資料
1(2)
33
.實際資料
1(3)
.實際資料
1(4)
35
三﹒實例
圖 3.1 測試區影像
實驗區二 實驗區一
.實際資料
2(1)
37
.實際資料
2(2)
.實際資料
2(3)
39
四﹒結論與後續目標
.資料回饋
.建立交線邏輯及精度評估
.改寫程式為c語言並界面化
.搜尋近似法向量之效率加強
參考文獻
(1)
【
1】陳英鴻, 2004 ,光達點雲資料連結點匹配之研究,國立成功大學測量
與
空間資訊學系研究所碩士論文,
Pp.23
【
2】劉燈烈, 2004 ,地面光達點雲資料的平差結合與影像敷貼,國立成功
大學測量及空間資訊研究所碩士論文
【
3】賴志恆, 2003 ,雷射掃瞄點雲資料八分樹結構化之研究,國立成功大
學
測量與空間資訊學系研究所碩士論文,
Pp.1
、 2-3
【
4】陳衍豪, 2001 ,立體航測影像直線與圓弧輪廓建物半自動之三維模型
重建,國立成功大學測量及空間資訊研究所碩士論文,
Pp.24-25
【
5】 Shing-Hung Lin, Jen-Jer Jaw,
2004,“Structrualization of LIDAR
data set”, The 25th ACRS A-3.3
41
![圖 1.2 Pseudo-Grid 示意圖 [Cho W et al., 2004]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8774144.213283/5.1080.152.896.205.711/圖12PseudoGrid示意圖ChoWetal24.webp)

![圖 1.5 四分樹範例示意圖 (a) 資料點分布及樹狀結構示意圖 (b) 以二元影像標示資料點分布圖 [Zhirkov, 2001]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8774144.213283/8.1080.68.883.87.729/四分樹點分布及樹狀結構示意b影像標示資料點分布圖.webp)
![圖 1.6 PolyWork 執行流程圖 [InnovMetric, 2001]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8774144.213283/9.1080.89.997.98.734/圖16PolyWork執行流程圖InnovMetric21.webp)