99-61-7470
MOTC-IOT-98-H1DB007
全光纖式邊坡穩定監測系統整合
與現地應用測試(3/4)
99-61-7470 MOTC-IOT-98-H1DB007
著 者:李豐博、黃安斌、饒正
蔡東霖、李瑞庭
全光纖式邊坡穩定監測系統整合
與現地應用測試(3/4)
國家圖書館初版品預行編目資料 全光纖式邊坡穩定監測系統整合與現地應用測試(3/4) 著 者:李豐博、黃安斌、饒正、蔡東霖、李瑞庭 出版機關:交通部運輸研究所 地 址:10548 台北市敦化北路 240 號 網 址:www.ihmt.gov.tw (中文版>中心出版品) 電 話:(04) 26587176 出版年月:中華民國 99 年 5 月 印 刷 者: 版(刷)次冊數:初版一刷 110 冊 本書同時登載於交通部運輸研究所港灣技術研究中心網站 定 價:200 元 展 售 處: 交通部運輸研究所運輸資訊組•電話:(02) 23496880 國家書店松江門市:10485 台北市中山區松江路 209 號 F1•電話:(02) 25180207 五南文化廣場:40042 台中市中山路 6 號•電話:(04)22260330
全光纖式邊坡穩定監測系統整合與現地測試.
(3/4) / 李豐博等著. – 初版. – 臺北市
: 交通部運研所, 民 99. 05
面; 公分
參考書目:面
ISBN 978-986-02-3696-5 (平面)
1. 防災工程 2. 山坡地 3.光纖感測
445.5 99009873
99
全光纖式邊坡穩定監測系統整合與現地應用測試
(3/4)
交通部運輸研究所合作研究計畫出版品摘要表
出版品名稱:全光纖式邊坡穩定監測系統整合與現地應用測試(3/4) 國際標準書號(或叢刊號) ISBN 978-986-02-3696-5 (平裝) 政府出版品統一編號 1009901602 運輸研究所出版品編號 99-61-7470 計畫編號 98-H1DB007 本所主辦單位:港研中心 主管:邱永芳 計畫主持人:李豐博 研究人員:饒正 聯絡電話:04-26587192 傳真號碼:04-26564418 合作研究單位:國立交通大學防災與水環境研 究中心 計畫主持人:黃安斌 研究人員:黃安斌、蔡東霖、李瑞庭 地址:新竹市大學路 1001 號 聯絡電話:03-5712121 研究期間 自 98 年 3 月 至 98 年 10 月 關鍵詞:光纖感測器、光纖水壓計、地下水文數值模型分析、邊坡穩定監測 摘要: 傳統邊坡安全監測大多採用傾斜管配合手動式傾斜儀監測地層內滑動面之所在位置及移動 量,地下水位監測則多使用開口式水位計。這些監測儀器幾乎全部使用手工在現場紀錄讀數。 此一安排不但費時,在雨季或邊坡發生滑動時,現場紀錄讀數可能無法進行或非常危險,而這 些情況下也可能是最需要監測儀器讀數的時候。近年來雖有可做自動化監測之電子式監測儀器 之研發,但電子式自動化監測系統具有價格昂貴、易受電磁波干擾、雷擊破壞、且儀器設備若 長期處於潮濕環境容易短路故障等缺點。本計畫所研發之被動式光纖感測器相較於電子式儀器 的優點在於地層內沒有任何電子裝置,訊號傳輸距離遠可達數十公里及在光纖傳輸線上可連接 多點或分佈式之優點。本計畫以阿里山台 18 線公路五彎仔路段作為試驗場址,使用本研究研發 之光纖感測地層移動監測系統與分佈式光纖水壓計來監測該地區之地層滑動及水壓變化,以評 估使用全光纖感測系統在邊坡穩定監測之實用性,並配合地下水文數值模型分析,以作為該地 滑區日後穩定評估方法之依據。其中所安裝之光纖感測地層移動與分佈式光纖水壓監測系統已 在 2008 之辛樂克颱風與 2009 年之莫拉克颱風期間發揮其功能,在颱風期間持續提供並紀錄重 要之地層移動與水壓分佈之數據,其成果效益包含透過地下水流模型,可得知此區域地下水流 分佈與流向,以作為日後該區域整治方向,以及提供現場邊坡即時安全警示系統,作為公路單 位決策參考依據。 出版日期 頁數 定價 本 出 版 品 取 得 方 式 99 年 5 月 116 200 凡屬機密性出版品均不對外公開。普通性出版品,公營、公 益機關團體及學校可函洽本所免費贈閱;私人及私營機關團 體可按定價價購。 機密等級: □密 □機密 □極機密 □絕對機密 (解密條件:□ 年 月 日解密,□公布後解密,□附件抽存後解密,PUBLICATION ABSTRACTS OF RESEARCH PROJECTS INSTITUTE OF TRANSPORTATION
MINISTRY OF TRANSPORTATION AND COMMUNICATIONS
TITLE: Integration and Field Testing of an All Fiber Optic Slope Stability Monitoring System (3/4)
ISBN (OR ISSN) ISBN978-986-02-3696-5
(pbk)
GOVERNMENT PUBLICATIONS NUMBER 1009901602
IOT SERIAL NUMBER 99-61-7470
PROJECT NUMBER 98-H1DB007 DIVISION: Harbor & Marine Technology Center
DIVISION DIRECTOR: Chiu Yung-fang PRINCIPAL INVESTIGATOR:Lee Feng-bor PROJECT STAFF: Jao Cheng
PHONE: (04) 26587192 FAX: (04) 26564418
PROJECT PERIOD FROM March 2009 TO October 2009 RESEARCH AGENCY: National Chiao Tung University, Disaster Prevention and Water Environment Research Center PRINCIPAL INVESTIGATOR: Huang An-bin
PROJECT STAFF: Huang An-bin, Tsai Tong-lin, Lee Jui-ting ADDRESS: #1001, Ta Hsueh Rd. , Hsinchu, 300, Taiwan, R.O.C PHONE: (03) 5712121
KEY WORDS: Fiber Optic Sensor, Fiber Optic Piezometer, Ground Water Flow Numerical Model Analysis, Slope Stability Monitoring
ABSTRACT:
Conventional slope stability monitoring often involves the use of inclinometer casings and open-end piezometers. A plastic or aluminum casing is installed in the ground and an electronic carriage referred to as the inclinometer probe (IP) is lowered into the pre-installed casing to measure the inclinations. The displacement profile of the casing is determined by accumulating relative movements from IP readings. Open-end piezometers are used to monitor the ground water levels. Both sensors are read manually in the field. The procedure is time consuming and can be dangerous when conducted in rainy season or when the slope is unstable. The safety hazards may prevent the critical instrument readings from being taken when they are needed the most. Many automated electronic devices have been developed recently. These devices can be costly and subject to electromagnetic interference and lightning damage when deployed in the field. In comparison with electronic devices, the optic fiber sensors, which are passive systems with no electronic circuitry installed underground can easily, transmit signals by tens of kilometers through light. Multiple sensors can be connected to a single optic fiber. A test site has been set up at the Five Turn Point of Highway 18 near Alishan. The fiber optic ground displacement and ground water monitoring sensors developed by the research team have deployed at the test site. The main purpose of this research is to verify the feasibility of using an all fiber optic sensor system in slope stability monitoring. Coupled with field measurements, a ground water numerical model will be established as a basis to evaluate the slope failure mechanisms. The fiber optic ground displacement and pore water profile monitoring systems have demonstrated their effectiveness by continuously transmitting and recording valuable data during Typhoon Synlaku in 2008 and Morakot in 2009. The achievement and benefit of the water
全光纖式邊坡穩定監測系統整合與現地應用測試(3/4)
目 錄
中文摘要 ...I 英文摘要 ... II 圖目錄 ... V 表目錄 ...IX 第一章 緒論 ...1-1 1.1 計畫背景 ...1-1 1.2 計畫工作項目與執行進度說明 ...1-3 第二章 光纖監測系統更新與目前概況...2-1 2.1 光纖監測系統之孔位位置配置與選定要素說明...2-1 2.2 光纖監測系統目前運作狀況說明 ...2-4 2.3 光纖自動化監測系統與光纖光柵水壓計改進說明...2-11 第三章 重力式光纖傾斜計與加速度感測器研發...3-1 3.1 光纖光柵原理簡述 ...3-1 3.2 光纖光柵傾斜/加速度感測 ...3-5 3.3 FBG-I/A 加速度感測原理...3-6 3.4 FBG-I/A 傾斜感測原理...3-9 3.5 重力式光纖傾斜計之改良與測試 ...3-12 第四章 辛樂克與莫拉克颱風之監測數據比較說明...4-15.1 地下水流數值模式簡介 ... 5-1 5.1.1 理論基礎與離散方程式 ... 5-1 5.1.2 模式之驗證 ... 5-3 5.1.3 模式之穩態與非穩態測試 ... 5-5 5.1.4 模式之降雨入滲測試 ... 5-8 5.2 五彎仔地區地下水流模擬 ... 5-12 第六章 結論與建議... 6-1 6.1 結論 ... 6-1 6.2 建議 ... 6-2 6.3 後續工作項目 ... 6-2 參考文獻 ... 參-1 附錄一 期中審查委員意見及辦理概況... 附錄 1-1 附錄二 期末審查委員意見及辦理概況... 附錄 2-1 附錄三 期末報告簡報資料... 附錄 3-1
圖 目 錄
圖 2.1 傳統水壓計與光纖光柵水壓計現地安裝比較圖...2-2 圖 2.2 全光纖式監測儀器配置圖...2-3 圖 2.3 NCTU-03 光纖光柵水壓監測孔位歷時水壓變化圖 ...2-5 圖 2.4 IHMT-01 監測孔位旁之 GPS 監測站 ...2-6 圖 2.5 自動化光纖光柵解讀系統監測畫面...2-7 圖 2.6 光纖感測器自動化擷取系統地層位移畫面...2-8 圖 2.7 光纖感測器自動化擷取系統水壓分布及歷時畫面...2-9 圖 2.8 自動化光纖解讀系統警訊發送畫面...2-10 圖 2.9 高供電量(4800W)不斷電系統 ...2-12 圖 2.10 低耗電量自動化光纖光柵解讀儀器系統...2-13 圖 2.11 改良後光纖光柵水壓計實體圖...2-14 圖 2.12 改良後光纖光柵水壓計率定圖...2-15 圖 2.13 溫度效應對於光纖光柵水壓計率定圖...2-16 圖 2.14 修正溫度對於光纖光柵水壓計結果圖...2-17 圖 3.1 光纖光柵反射原理示意圖...3-3 圖 3.2 光纖光柵感測機制示意圖...3-4 圖 3.3 FBG accelerometer 側面剖示圖...3-5 圖 3.4 FBG inclinometer 剖示圖...3-6 圖 3.5 FBG-I/A 加速度感測示意圖...3-8 圖 3.6 FBG-I/A 傾斜感測示意圖...3-10圖 3.8 FBG-I/A 傾斜標定結果 ... 3-11 圖 3.9 第一次修正後 FBG-I/A 傾斜感測示意圖 ... 3-12 圖 3.10 (a)FBG-I/A 實體圖側視圖;(b) FBG-I/A 實體圖斜角視圖 ...3-13 圖 3.11 第一次修正 FBG-I/A 傾斜標定結果 ... 3-14 圖 3.12 第二次修正 FBG-I/A 傾斜感測示意圖 ... 3-15 圖 3.13 FBG-I/A 光纖光柵黏貼過程圖... 3-16 圖 3.14 FBG-I/A 傾斜感測加熱固化黏貼膠... 3-16 圖 3.15 FBG-I/A 傾斜感測計標定... 3-17 圖 4.1 辛樂克與莫拉克颱風期間累積降雨量... 4-2 圖 4.2 NCTU-03 -14m~-24m 水壓與辛樂克颱風之累計降雨量變化趨勢圖 ...4-3 圖 4.3 NCTU-03 -29m~-39m 水壓與辛樂克颱風之累計降雨量變化趨勢圖 ...4-4 圖 4.4 NCTU-03 -44m~-54m 水壓與辛樂克颱風之累計降雨量變化趨勢圖 ... 4-5 圖 4.5 NCTU-03 水壓歷時變化於辛樂克颱風... 4-6 圖 4.6 NCTU-03 3D 水壓歷時變化於辛樂克颱風量變化趨勢圖 ... 4-7 圖 4.7 NCTU-03 -14m~-24m 水壓與莫拉克颱風之累計降雨量變化趨 勢圖 ... 4-8 圖 4.8 NCTU-03 -29m~-39m 水壓與莫拉克颱風之累計降雨量變化趨
圖 5.1 驗証案例區域示意圖... 5-3 圖 5.2 驗証案例模擬結果... 5-4 圖 5.3 測試案例示意圖 5.1.3 模式之穩態與非穩態測試... 5-5 圖 5.4 水位 20m 之穩態地下水壓力水頭與水位模擬結果 ... 5-6 圖 5.5 水位 25m 之穩態地下水壓力水頭與水位模擬結果 ... 5-6 圖 5.6 非穩態地下水壓力水頭模擬結果... 5-7 圖 5.7 降雨入滲地下水壓力水頭模擬結果... 5-9 圖 5.8 降雨入滲地下水壓力水頭隨時間模擬結果... 5-10 圖 5.9 五彎仔地區地下水流模擬區域圖... 5-11 圖 5.10 五彎仔地區地下水流率定與驗證結果... 5-12 圖 5.11 辛樂克颱風降雨資料 ... 5-13 圖 5.12 地下水位面隨時間模擬結果... 5-13
表 目 錄
第一章 緒 論
1.1 計畫背景
針對潛在或持續滑動之邊坡的監測,國內外大多採用傳統傾斜管 配合手動式傾斜儀 (inclinometer probe, IP),視情況之需要配合開口式 水位管(open ended piezometer)做地下水位之監測。IP是以手動的方法放 入傾斜管中紀錄讀數,開口式水位管則是以皮尺放入管中決定水位之 深度。國內有許多公路或鐵路(包括高速鐵路)邊坡,由於其位置偏 遠或不易到達,難以使用傳統傾斜管與手動式傾斜儀做邊坡穩定監 測,此類監測系統自動化與遠距離訊號傳輸確實有其必要性。傾斜管 之監測可以用管內傾斜儀(in place inclinometer, IPI)以長期置入的方 法做自動化監測。開口式水位管內可置入電子式水壓計以水壓感測水 位。配合自動資料擷取系統,可自動紀錄IPI與電子式水壓計讀數。但 電子式自動化監測系統具有價格昂貴、易受電磁波干擾、雷擊破壞、 且儀器設備若長期處於潮濕環境容易短路故障等缺點。同時傳統開口 式水位管受其尺寸限制,在同一鑽孔內通常最多安裝兩管,對於地下 水位/水壓之判讀多所限制。 光纖感測技術具有許多傳統電子感應技術沒有的優點,包括(1)體 積小-光纖直徑一般為250μm左右體積甚小;(2)耐久性高-光纖之主 要成份是矽(silica)為非金屬,可以長期埋在地下而不易腐蝕或改變其性 質;(3)光纖訊號可長(數十公里)距離傳輸而不受電磁波干擾;(4)可 以在同一光纖上做多點分佈式的監測。
近來國內已研發成功光纖光柵(fiber Bragg grating, FBG)節理式 偏斜儀(FBG segmented deflectometer, FBG-SD),其設計是與傳統傾 斜管匹配,將 FBG-SD 插入固定於地層內之傾斜管,以 FBG-SD 節理 間偏斜角度之改變來估算傾斜管之變形分佈。FBG-SD 已成功的應用於
3,000 至 4,000με(但可視感測器靈敏度做調整),若每一感測器間距為 1 公尺長,則單一 FBG-SD 最大可感應位移量為正負 3.14 公分(總位移 量為 6.28 公分),當邊坡滑動量大於 FBG-SD 允許感測範圍量時,將使 得部分 FBG-SD 可能無法繼續發揮功能(其餘未超過允許量測範圍時, 可繼續感測傾斜觀測管變形量之改變),此時,若能在傾斜觀測管外側 增加一額外(redundancy),如光纖拉伸計,一般單模光纖可承受之應 變量為 15,000 至 20,000με,相對於 FBG-SD 其感測靈敏度較低,感 測靈敏度約 30με,對於低靈敏度之光纖光柵拉伸計較能承受大變形 且低成本之配置則更能增加此變形監測系統之有效性與可靠性。也就 是說小變形範圍內由 FBG-SD 所控制;大變形範圍則由光纖拉伸計所 控制,而邊坡破壞經常也涉及地下水壓變化,因此若能同時監測水壓 則更能有效反應地層之破壞潛能。 使用光纖感應系統做邊坡穩定監測需要實用而能夠維持長期穩定 之訊號解讀裝置。市場上現有光纖訊號解讀系統並不一定能夠滿足現 場監測在經濟與穩定性之需求,而必須在軟硬體方面做必要之檢測與 改良。國內外在 FBG 水壓感測技術方面也有初步之發展,但其實用性 仍然有限。 數值分析顯示,原深層地下水位之邊坡在不同降雨程度下其地下 水位會會有不同程度之上升,受地下水位上方土層為非飽和及滲流的 影響,降雨前後地層內水壓分佈常是非線性的。如果使用傳統在鑽孔 內只量測一至兩個深度然後以線性內差的方法來估算水壓分佈的方法 會有明顯的誤差。此一現象也顯示做地層內分佈式水壓監測之重要性。 本計畫之目的是進一步改良光纖地層位移與水壓監測技術之穩定
本計畫所希望達到之總目標有以下四項: 1. 光纖地層位移與水壓監測系統之整合與必要之改良。 2. 可與 FBG-SD 匹配,低解析度能承受大變形,低成本之光纖地層感 應系統之研發。 3. 光纖感應訊號解析與資料擷取/傳輸系統之整合。 4. 以四年的時間設定測試場所做系統之現場應用測試。 測試地點在第一年選定,每年視研究之需要增加鑽孔及安裝新監 測儀器,在此期間並連續紀錄數據,累積長期之使用經驗。
1.2 計畫工作項目與執行進度說明
本年度計畫之主要工作與進度內容為: 1. 以提高自動化光纖光柵解讀系統,如更換低耗電量工業型電腦及增 加不斷電系統之供電時數。 2. 考量非飽和狀態下之現場地下水數值模擬,且完成模式之穩態與非 穩態測試。 3. 現場地下水水位監測資料與數值模擬比較。 4. 完成重力式光纖傾斜儀改良與室內標定。 5. 現場光纖感測器資料擷取與系統維護。第二章 光纖監測系統更新與目前概況
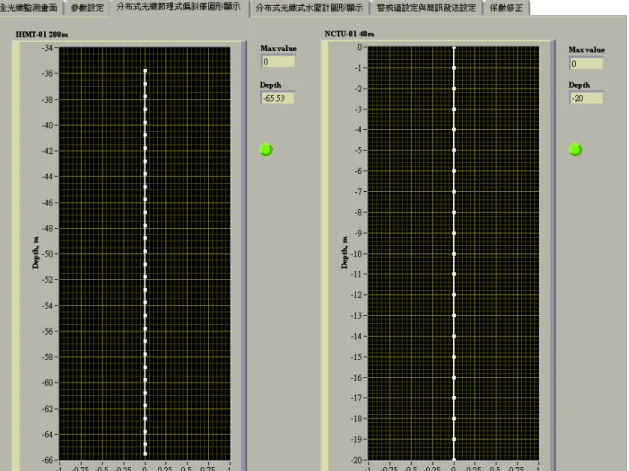
本年度計畫中於光纖光柵解讀系統部分,更換低耗電量之工業型 電腦,及增加不斷電系統之供電量,以提供緊急情況下,光纖光柵解 讀系統能夠正常運作,即時發送重要監測資料與訊息。另外,今年度 現場會增加一光纖水壓監測孔位,其監測孔內會裝設10組光纖光柵水 壓計,而孔位暫定安裝置IHMT-01傾斜觀測管附近(圖2.2所示),因此, 可藉由兩孔水壓監測管(NCTU-03及NCTU-04),來判斷在B-B斷面上地 層內之水流流向,以下為說明光纖監測系統更新後配置說明,及各監 孔位所安裝監測感測器成果。2.1 光纖監測系統之孔位位置配置與選定要素說明
自95年5月5日本研究於至臺18線阿里山公路五彎仔路段現地勘 查,依據現有監測資料(青山工程顧問報告),現地傾斜觀測管編號C-11 仍持續量測中,以及水位觀測井B2,據監測資料結果可知在暴雨期間, 現地水位及水壓監測管內水位或水壓變化遽增,約可達數十公尺。由 於B2與C-11兩鑽孔都位於N3滑動區之上緣(青山工程顧問報告),此處 對於現地地下水流數值分析為重要之邊界條件。所以本研究基於數值 模擬分析考量選擇於傾斜觀測管C-11附近新增一傾斜觀測管,深度為 40m並裝設研發之FBG-SD偏斜儀監測管內變形(詳細量測方法可見本 計畫第一年度報告)。而現地水壓觀測部分,為了考量現有封層技術, 將原先規劃設置在B-2旁100公尺水壓觀測井分成兩部分,首先在C-11 旁設置深度40公尺的水壓觀測井,並以間隔5公尺之距離,安裝5組光NCTU-03兩水壓觀測管中之水壓隨深度的變化,圖2.1為傳統水壓計與 光纖光柵水壓計現地安裝比較圖。 IHMT-01 200公尺傾斜觀測管之配置為考量上述之光纖監測孔位 大多分布於B-B剖面上(見圖2.2),加上預定裝設位置距離邊坡坡面僅有 1~2公尺,較容易監測傾斜管之變形量。
Standpipe
Sand pack
Bentonite seal
PVC pipe
FBG piezometer
圖 2.1 傳統水壓計與光纖光柵水壓計現地安裝比較圖圖
2.2
全光纖式監測儀器配置圖(青山工程顧問公司
, 2007
2.2 光纖監測系統目前運作狀況說明
圖2.3為目前NCTU-03光纖柵水壓觀測井歷時曲線圖,由圖可知該 水壓觀測井自95年10月安裝完成後,初始所量得的數據為隨深度變化 之淨水壓力,其代表性非常合理,經過一個月後(071026~071119),水 壓觀測井內部水壓慢慢消散,深度從-50公尺至-5公尺,各點深度位置 所呈現之水壓力均在100kPa以下(10公尺水頭高度),且該期間也無下雨 跡象,所以各感測點運作正常。而071026至080523這七個月期間中, 並非為南部地區雨季季節,故各深度點之水壓力並無太大變化之處且 量測數據非常重疊。08523至080611期間,受季節性氣候之影響,南部 地區之梅雨季節正逢開始,且該段期間降雨量非常多,所以深度-35公 尺以下之水壓力有明顯增加之趨勢。另外,上年度辛樂克颱風期間, 成功地完整擷取監測資料,而當日降雨量為600公厘,由數據結果顯示 NCTU-03孔內水壓力在短時刻中,增加有10至20公尺之水頭高度(詳細 說明可參閱本計畫第二年度報告)。目前NCTU-03孔位內水壓計個感測 點均感應正常,如圖2.3。 圖2.4為逢甲大學測量資訊研究中心於IHMT-01傾斜觀測管附近裝 設一GPS監測點位,後續IHMT-01所計算出之地表位移可與該GPS監測 點位監測結果比較。圖2.5至圖2.8為目前自動化光纖光柵解讀系統監測 畫面圖。-10
0
10
20
30
40
50
60
Pressure head, m
-60
-50
-40
-30
-20
-10
Depth, m
NCTU-03 071026 071026~071119 071026~080611 071026~080706 071026~080722 071026~080831 071026~090809 圖 2.3 NCTU-03 光纖光柵水壓監測孔位歷時水壓變化圖2.3 光纖自動化監測系統與光纖光柵水壓計改進說明
圖2.9為本計畫新增設高供電量不斷電系統,可提供電功率達 4800W,該不斷電系統可因應不同需求增加電瓶數量,以增加其電功 率之大小,但礙於監測小屋的空間使用大小,本次只裝設2組12伏特200 安培容量之電池;另外,由於不斷電系統供電量有限,為了使得自動 化光纖光柵解讀系統,能夠在緊急狀況下運作正常,所以將自動化光 纖光柵解讀系統之控制電腦更換成低耗電量之工業型電腦,其優點每 小時耗電功率為15W,不需風扇散熱,以減少電量,圖2.10為自動化光 纖光柵解讀儀器圖。 圖2.11為改良後之光纖光柵水壓計實體圖,其改良為將溫度光柵直 接黏貼於光纖光柵水壓計本體上,直接量測水壓計本體受溫度之影 響,主要目的為修正感測器會因外在溫度變化,使得感測器之讀數會 受溫度產生變化,故光纖光柵水壓計所測得之光纖光柵改變量,須扣 除溫度影響部分,才可計算實際之壓力值,而圖2.12為室內標定結果圖 (於25℃之室溫),其靈敏度約為0.1 KPa,圖2.13為將改良後之光纖光柵 水壓計放置於一恆濕恆溫箱進行溫度測試,由測試結果圖可看出,水 壓計上之溫度光柵對於溫度反應比水壓計還高,因此當水壓計受到外 在溫度影響時,可藉由溫度光柵來修正溫度對光纖光柵水壓力計之影 響,方程式(2.1)為說明,光纖光柵水壓計之光柵波長變化量含有,Bm 受壓力狀況下,所產生之光柵波長改變量; BT 受溫度影響下之光柵 波長改變量;Bc為將水壓計修正在室溫25℃下之實際受壓力所造成之 改變量。上下處兩孔之水壓監測孔(NCTU-03及NCTU-04),見圖2.2。進而判斷 出該斷面之地下水流之可能流動方向,並與現場數值模擬分析相互比 較。
圖 2.11 改良後光纖光柵水壓計實體圖 溫度光柵
0 2000 4000 6000 8000 Wavelength shift, pm 0 200 400 600 P res su re, kPa R2 = 0.9998 Temperature = 25oC 圖 2.12 改良後光纖光柵水壓計率定圖
5 10 15 20 25 30 35 40 45 Temperature, oC -600 -400 -200 0 200 400 600 Bts & BT , pm FBG temperature sensor R2 = 0.9988
Gauge pressure transducer R2 = 0.9987
5 10 15 20 25 30 35 40 45 Temperature, oC -300 -200 -100 0 100 200 300 Bm & Bc , pm Original reading Corrected to 25oC 圖 2.14 修正溫度對於光纖光柵水壓計結果圖
表 2.1 NCTU-04 光纖光柵水壓計配置表 水壓計編號 壓力感測波長, nm 溫度感測波長, nm 率定係數, kPa/pm AL-A-1 1524 1524 0.1266 AL-A-2 1530 1530 0.1034 AL-A-3 1536 1536 0.1004 AL-A-4 1542 1542 0.1067 AL-A-5 1548 1548 0.1274 AL-B-1 1524 1524 0.1137 AL-B-2 1530 1530 0.1008 AL-B-3 1536 1536 0.1039 AL-B-4 1542 1542 0.1187 AL-B-5 1548 1548 0.1084
第三章 重力式光纖傾斜計與加速度感測器研發
本章節主要敘述重力式光纖傾斜與加速度感測器之感測原理,以 及其研發構想與應用範圍,並透過室內標定之進行初步驗證。3.1 光纖光柵原理簡述
光纖光柵的製造係利用高能量同調雷射在光纖曝光造成折射率永 久改變,成為一系列週期為的明暗條紋,此稱之為光纖光柵(Fiber Bragg Grating, FBG)。當一寬頻光耦合進入此一光纖時,除了滿足布 拉格條件(Bragg condition)的特定波長,其餘波長都會因為相位差而 相消(Hill, 2005 ; Kersey, 1992 ; Meltz, 1989 ; Measures, 2001 ; Othons, 1999 ; Rao, 1998、李瑞庭, 2005)。 其布拉格反射波長B為 B 2n ...(3.1) 其中: n = 光纖纖心的有效折射率 = 折射率週期性改變的間距 圖3.1為光纖光柵反射原理示意圖,光柵中的週期明暗條紋類似在 光纖中製造一系列透鏡組合,當寬頻光束通過這些透鏡組合時,造成 某特定頻率光波被反射,而其他頻率光波則繼續向前傳導,而這些透 B 2n ...(3.2) 根據應變的定義 l l ...(3.3) 得到 l n n l l B B 2 2 ...(3.4) 因此 B B l l ...(3.5) 當外力施加產生應變後,不只是反射回來的B會改變,光纖的有 效折射率n也會同時改變。因此上式應該被修正為 K l l K B B ...(3.6) B B K ...(3.7) 當光纖光柵受到溫度變化時,波長飄移量可由下式表示
T KT T ...(3.8) 其中α = 光纖的熱膨脹係數(Thermal Expansion Coefficient) KT = 溫度敏感係數
grating
sensor(λ
j)
λ
I
wavelength
shift decoding
outputs
λ
1broadband
source
input
spectrum
λ
coupler
I
I
I
λ
returns
λ
wavelength
encoded
λ
2λ
3measurand field
圖 3.1 光纖光柵反射原理示意圖 (Ho et al., 2005) 布拉格波長飄移並非完全線性,在高溫時溫度變化會使波長飄移 較為顯著,因為在ξ在150℃約為6.9×10-6/℃,450℃時則變為約9.6×10-6/ ℃,而熱膨脹係數α=0.55~1.1×10-6/℃。然而在室溫條件下,1℃的溫度 變化約使得布拉格飄移約1.1~1.2×10-2nm。3.2 光纖光柵傾斜/加速度感測
本 研 究 所 研 發 雙 質 量 光 纖 光 柵 加 速 度 傾 斜 感 測 裝 置 (FBG inclinometer/accelerometer, FBG-I/A)之整體構件如圖3.3與圖3.4所示 (黃安斌、何彥德, 2008)。其加速度量測單元是由質量重塊與軸承桿件 連接而形成。質量重塊將分別黏著於左右之兩個光纖光柵(FBG1與 FBG2)拉緊,兩個FBG訊號透過光纖傳遞。感測元件固定於上蓋。透過 軸承左右偏移。重塊與光纖光柵所形成之組合體以軸承為軸心旋轉並 產生側向位移量。圖 3.4 FBG inclinometer 剖示圖
3.3 FBG-I/A加速度感測原理
圖3.5為FBG-I/A加速度感測示意圖,當感測裝置相對於支架垂直 方向(x方向)產生加速度ax時,感測器之系統運動公式如下:
a b K
x Max x M ( / )2 1 ...(3.9) 其中 M = 重塊質量K1 = 光纖光柵張力方向之勁度 a = 光纖光柵對應軸心之力臂 b = 重力塊對應軸心之力臂 將公式兩邊除以2M,得到: x ox a x2 ...(3.10) 其中
a b K
M o 1 2 ) / ( ...(3.11) 代表此加速度儀之天然頻率。當加速度儀受一x向週期性振波,其 迴旋角度頻率為時 t i x x Ae a ...(3.12) 其中 Ax = 振幅 重塊質量所對應之週期性振波為 t i Xe x ...(3.13) 將公式(3.11)與(3.13)重塊振幅代入公式(3.9)即可得到重塊質量振 幅X 因此透過高頻
FBG之擷取,即可計算振幅X隨時間之變化,而得到 量測之目的。 strain/G) ( 1 / 2 0 L b a 0 0 2 f 圖 3.5 FBG-I/A 加速度感測示意圖3.4 FBG-I/A傾斜感測原理
在無傾斜時光纖光柵左右平衡,當傾斜時重塊重心軸向至軸承間 之距離dFBG。光纖光柵透過重力塊受制於光纖光柵產生反作用拉力與順 時針方向之力矩(Mcw)為
FBG
FBG cw F d M ...(3.16) 其中 FFBG = 光纖光柵所受拉力之改變 dFBG = 光纖光柵相對於軸承之力臂 當 傾 斜 時 重 塊 受 重 力 影 響 使 得 此 組 合 體 受 逆 時 針 方 力 矩 (moment),此一逆時針方力矩(Mccw)為:
M sin ccw Mg L M ...(3.17) 其中 g = 重力加速度 M L = 重塊相對於軸承之力臂 Mccw與Mcw大小相同方向相反,因此當感測裝置相對於重力方向 產生傾斜角度時(如圖3.6所示),此時
與FBG有以下之關係式: FBG M FBG d L Mg F sin ...(3.18)圖 3.6 FBG-I/A 傾斜感測示意圖 在重力塊上左右之光纖光柵所受拉力改變FBG大小相同正負相 反。利用此一特性可以抵銷溫度效應,因為溫度對重力塊左右方之光 纖光柵所產生拉力改變FBG大小與正負都相同。將重力塊左右方光纖 光柵所量得拉力改變FBG數值相減即可將溫度效應消除。 如圖3.7所示每一FBG-I/A單元上下配有滾輪,可以配合放入傳統 傾斜管中,當地層滑動時FBG-I/A可經由傾斜角度變化量來計算單組 FBG測傾儀側向移動量,最後累積計算出變形監測管因地層移動而造 成之側向位移。在實驗室中可標定出光柵波長改變量與角度變化量的 關係(圖3.8),根據標定結果計算,FBG波長改變1pm(解析儀所能讀取 之最小FBG波長改變量)所對應之角度變化量,傾斜角度精度在0.002 與0.004度之間。在監測地層滑動時我們可以將多個FBG-I/A串接在一
3.5 重力式光纖傾斜計之改良與測試
為了考量重力式光纖傾斜計量測角度增加及感應最小角度之變化 量,故將原先設計之重力式光纖傾斜計進行改良。依據力學平衡條件 下 , 將 原 有 重 力 式 光 纖 傾 斜 計 的 重 力 塊 尺 寸 改 為16mm *16mm* 60mm,其總重量為180g,而重力塊之重心距離軸承中心長度(力臂距 離)為55mm,另外,為了提高系統支撐重量塊之穩定度,將軸承端改 用2顆3mm有帽之軸承。圖3.9及圖3.10為此重力式光纖傾斜計之設計圖 與實體圖。軸承
鋁片
重力塊
180g
光柵
Unit: mm
圖 3.10 (a)FBG-I/A 實體圖側視圖;(b) FBG-I/A 實體圖斜角視圖
由重力式光纖傾斜計標定試驗結果,當光纖光柵(FBG)波長改變 1pm(解析儀所能讀取之最小FBG波長改變量)所對應之角度變化量為 0.005與0.007度之間。其可感測角度範圍為-3度至+12度之間,其標定
圖 3.11 第一次修正 FBG-I/A 傾斜標定結果 由前一次重力式光纖傾斜計改良結果,如圖3.11,其感測效果未達 預期的感應範圍,且感應靈敏度偏低,其感測範圍0度至12度之間,可 感應最小角度變化量為0.0064度,因此,重新考量力平衡方程式,其方 程式如下所示: sin D W L F ...(3.19) 其中,F為光纖光柵因系統旋轉時,所產生之拉力;D為光纖光柵 與軸承中心之距離;W為系統之重力塊之重量;L為重力塊之重心距離
由方程式(3.19)可觀察出,當兩光柵之間距越小(D),其系統靈敏度 相對會提高;若重力塊重量越重(W),其靈敏度相對會提高;軸承與重 力塊距離越長(L),其靈敏度相對提高。 依據上述說明,則將重力式光纖傾斜計進行第二次修正,其中重 力塊尺寸改為16mm *6mm* 100mm,其重力塊重量為100g,重塊相對 於軸承之力臂為5mm,而黏貼光柵之鋁片厚度改為2mm,圖3.12為第二 次修正之重力式光纖傾斜計(FBG-I/A)設計圖,圖3.13與圖3.14為重力式 光纖傾斜計製作過程圖,圖3.15為重力式光纖傾斜計標定過程圖。 軸承 鋁片(0.7MM溝槽) 銅塊 光柵 Unit: mm
圖 3.13 FBG-I/A 光纖光柵黏貼過程圖
圖 3.15 FBG-I/A 傾斜感測計標定
圖3.16為標定結果可看出,修改後之重力式光纖傾斜計之靈敏度為
0.0039;其感測範圍角度為-12度到+12度之間,其相關係數(R2)為
第四章 辛樂克與莫拉克颱風之監測數據比較說明
圖4.1為辛樂克與莫拉克颱風期間之降雨量圖,可看出在這兩個颱 風期間內,當日累積降雨量可達到700~1000mm,圖4.2~圖4.4為辛樂克 颱風期間各深度之水壓力與累積降雨量之歷時變化曲線圖,由圖4.2 中,9/14晚間8點時刻前,位於-14m~-24m之FBG水壓計開始有水壓上 升的趨勢,爾後,-24m以下之水壓力有快速上升情形。圖4.5為將各深 度之FBG水壓力變化與時間關係圖,而各深度的水壓力變化為相對於 前一時刻的變化,可看出在9/13下午4點時刻時,-40m以上的FBG水壓 計有明顯的水壓變化,此後由於現場地層內可能開始有水平向滲流發 生,造成深層部分的FBG水壓計開始有發生水壓力變化,最大水壓力 變化可到達100kPa,在9/15上午4點時刻時,各深度的FBG水壓計無水 壓力變化,達到一穩定值,隨著時間增加,各深度的FBG水壓計之水 壓力呈現負值狀態,則表示水壓力開始慢慢消散。同樣地,圖4.7~圖4.9 為莫拉克期間各深度之水壓力與累積降雨量之歷時變化曲線圖,可看 出在8/8上午6點時刻前,-14m~-24m之FBG水壓計開始有較大的壓力變 化趨勢,圖4.10為將各深度之FBG水壓力變化與時間關係圖,而各深度 的水壓力變化為相對於前一時刻的變化,可看出在8/7上午9點時刻時, -40m以上的FBG水壓計有明顯的水壓變化,此後由於現場地層內可能 開始有水平向滲流發生,造成深層部分的FBG水壓計開始有發生水壓 力變化,最大水壓力變化可到達80kPa,在8/9約上午9點時刻時,各深 度的FBG水壓計無水壓力變化,達到一穩定值,隨著時間增加,各深 度的FBG水壓計之水壓力呈現負值狀態,則表示水壓力開始慢慢消散。 由上述辛樂克與莫拉克颱風事件來看,該區域的地層內之水壓力 變化,淺層部分水壓力會開始先增加,之後深層部分,因受其側向水 流入滲,則水壓力開始有變化趨勢,可觀察出,當地層內部受到水平 向滲流影響時,則水壓並非呈淨態水力梯度增加。8/5/09 8/6/09 8/7/09 8/8/09 8/9/09 8/10/09 8/11/09 Date 0 400 800 1200 P re cipita tio n pe r d ay, mm 莫 拉 克 颱 風 9/10/08 9/11/08 9/12/08 9/13/08 9/14/08 9/15/08 9/16/08 Date 0 400 800 1200 P re cipitatio n pe r d ay, mm 辛 樂 克 颱 風
圖 4.2 NCTU-03 -14m~-24m 水壓與辛樂克颱風之累計降雨量變化 趨勢圖
9/13/08 0:00
9/14/08 0:00
9/15/08 0:00
9/16/08 0:00
9/17/08 0:00
9/18/08 0:00
Date
0
400
800
1200
a ccumul a ted-precipitation, mm9/13/08 0:00
9/14/08 0:00
9/15/08 0:00
9/16/08 0:00
9/17/08 0:00
9/18/08 0:00
Date
0
40
80
Pres sure, kPa -14m FBG Pressure transducer9/13/08 0:00
9/14/08 0:00
9/15/08 0:00
9/16/08 0:00
9/17/08 0:00
9/18/08 0:00
Date
0
40
80
Pr ess u re, k P a -19m FBG Pressure transducer9/13/08 0:00
9/14/08 0:00
9/15/08 0:00
9/16/08 0:00
9/17/08 0:00
9/18/08 0:00
Date
0
40
80
120
Pr ess u re, k P a -24m FBG Pressure transducer9/13/08 0:00
9/14/08 0:00
9/15/08 0:00
9/16/08 0:00
9/17/08 0:00
9/18/08 0:00
Date
0
400
800
1200
accum u lated-precipitation, mm9/13/08 0:00
9/14/08 0:00
9/15/08 0:00
9/16/08 0:00
9/17/08 0:00
9/18/08 0:00
Date
0
40
80
120
Pressure, kPa -29m FBG Pressure transducer9/13/08 0:00
9/14/08 0:00
9/15/08 0:00
9/16/08 0:00
9/17/08 0:00
9/18/08 0:00
Date
0
60
120
180
240
Pressure, kPa -34m FBG Pressure transducer9/13/08 0:00
9/14/08 0:00
9/15/08 0:00
9/16/08 0:00
9/17/08 0:00
9/18/08 0:00
Date
0
60
120
180
Pressure, kPa -39m FBG Pressure transducer圖 4.4 NCTU-03 -44m~-54m 水壓與辛樂克颱風之累計降雨量變化
9/13/08 0:00
9/14/08 0:00
9/15/08 0:00
9/16/08 0:00
9/17/08 0:00
9/18/08 0:00
Date
0
400
800
1200
accum u lated-precipitation, mm9/13/08 0:00
9/14/08 0:00
9/15/08 0:00
9/16/08 0:00
9/17/08 0:00
9/18/08 0:00
Date
0
100
200
300
Pressure, kPa -44m FBG Pressure transducer9/13/08 0:00
9/14/08 0:00
9/15/08 0:00
9/16/08 0:00
9/17/08 0:00
9/18/08 0:00
Date
0
100
200
300
Pressure, kPa -49m FBG Pressure transducer9/13/08 0:00
9/14/08 0:00
9/15/08 0:00
9/16/08 0:00
9/17/08 0:00
9/18/08 0:00
Date
0
80
160
Pressure, kPa -54m FBG Pressure transducer圖
4.5 NCTU-03
圖
4.6 NCTU-03 3D
8/7/09 0:00
8/7/09 19:12
8/8/09 14:24
8/9/09 9:36
8/10/09 4:48
8/11/09 0:00
Date
0
1000
2000
3000
acc u m u late d -precipitation, mm8/7/09 0:00
8/7/09 19:12
8/8/09 14:24
8/9/09 9:36
8/10/09 4:48
8/11/09 0:00
Date
0
40
80
Pressure,kPa -14m FBG Pressure transducer
8/7/09 0:00
8/7/09 19:12
8/8/09 14:24
8/9/09 9:36
8/10/09 4:48
8/11/09 0:00
Date
0
40
80
Pressure, kPa -19m FBG Pressure transducer0
40
80
120
Pressure, kPa -24m FBG Pressure transducer8/7/09 0:00
8/7/09 19:12
8/8/09 14:24
8/9/09 9:36
8/10/09 4:48
8/11/09 0:00
Date
0
1000
2000
3000
acc u m u late d -precipitation, mm8/7/09 0:00
8/7/09 19:12
8/8/09 14:24
8/9/09 9:36
8/10/09 4:48
8/11/09 0:00
Date
0
40
80
120
160
Pressure,kPa -29m FBG Pressure transducer
8/7/09 0:00
8/7/09 19:12
8/8/09 14:24
8/9/09 9:36
8/10/09 4:48
8/11/09 0:00
Date
0
60
120
180
240
Pressure, kPa -34m FBG Pressure transducer8/7/09 0:00
8/7/09 19:12
8/8/09 14:24
8/9/09 9:36
8/10/09 4:48
8/11/09 0:00
Date
0
60
120
180
240
Pressure, kPa -39m FBG Pressure transducer 圖 4.8 NCTU-03 -29m~-39m 水壓與莫拉克颱風之累計降雨量變化 趨勢圖8/7/09 0:00
8/7/09 19:12
8/8/09 14:24
8/9/09 9:36
8/10/09 4:48
8/11/09 0:00
Date
0
1000
2000
3000
acc u m u late d -precipitation, mm8/7/09 0:00
8/7/09 19:12
8/8/09 14:24
8/9/09 9:36
8/10/09 4:48
8/11/09 0:00
Date
0
100
200
300
Pressure,kPa -44m FBG Pressure transducer
8/7/09 0:00
8/7/09 19:12
8/8/09 14:24
8/9/09 9:36
8/10/09 4:48
8/11/09 0:00
Date
0
100
200
300
Pressure, kPa -49m FBG Pressure transducer0
80
160
240
Pressure, kPa -54m FBG Pressure transducer圖
4.10 NCTU-03
圖
4.11 NCTU-03 3D
第五章 研究場址地下水流模擬
5.1 地下水流數值模式簡介
5.1.1 理論基礎與離散方程式 研究中採用坡地非飽和地下水流模型,模擬五彎仔地區之地下水流 況。坡地非飽和地下水流控制方程式表示如下 ( ) ( ) ( ) 1 C K K t x x z z ... (5.1)式中, 為壓力水頭(pressure head),K表示水力傳導係數(hydraulic
conductivity) , 為 体 積 含 水 量 (volumetric water content) ,
( ) C ,x 與 z分別表示水平與垂直座標,t為時間。 求解式(5.1)需要初始條件與邊界條件,初始條件可表示如下 0 ( , ,x z t 0) ( , )x z ... (5.2) 式中,0( , )x z 表示初始之壓力水頭分佈函數。另外,邊界條件可 分為壓力水頭邊界條件與流量邊界條件兩種。壓力水頭邊界條件可表 示為 ' ( , )t ... (5.3) 式中,'表示壓力水頭值,可隨時間變化,代表邊界之座標。流 量邊界條件可表示為 1 K i k n f x z ... (5.4) 式中,n 表示邊界之單位方向向量,f 為流出邊界之水流通量。符
利用隱式有限差分法可將式(5.1)離散化(discretization)為 1, 1 1, 1 1, 1 1, 1 1, 1 , , 1, , , 1, 1, 1, 1, , 1/ 2, 1/ 2, 1 1 1 ( ) / 2 n m n n m n m n m n m i j i j i j i j i j i j n m n m n m i j i j i j i i i i C K K t x x x x 1, 1 1, 1 1, 1 1, 1 , 1 , , , 1 1, 1, , 1/ 2 , 1/ 2 1 1 1 ( ) / 2 n m n m n m n m i j i j i j i j n m n m i j i j j j j j K K z z z z 1, 1, , 1/ 2 , 1/ 2 1 1 ( ) / 2 n m n m i j i j j j K K z z ... (5.5) 式 中 , 1/ 2,1, ( , 1, 1,1, ) 2 n m n m n m i j i j i j K K K , Kin1/ 2,1,mj (Ki jn,1.mKin1,1,jm) 2 , 1, 1, 1, , 1/ 2 ( , , 1 ) 2 n m n m n m i j i j i j K K K ,Ki jn,1,1/ 2m (Ki jn,1,mKi jn,1,1m) 2。t 為時間間距(time
interval),x與z分別為x與z方向之空間間距(space interval)。上標n表
示模擬時刻,上標m為疊代次數(iteration number),下標i與 j分別為x與
z方向之格網點座標。初始條件及邊界條件亦可利用上述有限差方法將
其離散化。此外,求解式(5.5)亦需要土壤之保水曲線(water retentation curve or soil-water characteristic curve)。本研究採用 Van Genuchten(1980) 提出之關係式 1 1 ( ) M r N s r S ... (5.6) 2 1 1/ 2 ( ) 1 1 M M r r s s r s r K K ... (5.7)
5.1.2 模式之驗證 利用具有解析解之案例,驗證模式之正確性。如圖 5.1 所示,範圍 為 75cm × 85cm 之矩形區域,其左上方有一長為 5cm 之入滲源,入滲 強度為qz -0.0278 cm/min;區域之右側與下方邊界保持 -250cm 之定 壓 力 水 頭 邊 界 , 其 餘 邊 界 則 為 不 透 水 邊 界 。 在 初 始 壓 力 水 頭 為 -250cm,且水力傳導係數及體積含水量與壓力水頭之關係呈指數函數 分布。 ) exp( ) ( K0 K ... (5.8) ) exp( ) ( ) ( 0 0 K A ... (5.9) 其中,、K0與A0分別為土壤常數,區域中壓力水頭隨時間之變化
如 Warrick and Lomen(1976)所示。
圖 5.1 驗証案例區域示意圖
當時間間距t 0.25 s、空間間距xz= 1cm、 =0.04、K0= 0.0694 cm/min、與A0= 0.1388 cm/min,地下水壓力水頭之模擬結果,如圖 5.2 所示。由圖 5.2 可知,模擬結果與解析解極為相近,顯示所建立地下水
圖 5.2 驗証案例模擬結果 Exact Simulation Exact Simulation 0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 x-direction z- direction (cm) T = 24 hrs T = 24 hrs T = 48 hrs T = 48 hrs
圖 5.3 測試案例示意圖 5.1.3 模式之穩態與非穩態測試 利用以下案例進一步測試模式。如圖 5.3 所示,坡地相關參數為坡 地坡度 45°、飽和水力傳導係數 Ksat 1.0 10 5m s ,飽和體積含水量 41 . 0 s ,殘餘體積含水量 r 0.06,進氣潛能因子 0.08,孔徑指數 1.8 N 。BC 邊界為不透水邊界,AB 與 DC 邊界為定水頭邊界,AD 邊 界為滲流邊界(seepage surface)。當 AB 邊界之水位為 10m,CD 邊界之 水位為 20m 與 25m 時,坡地之穩態地下水壓力水頭與水位模擬結果, 分別如圖 5.4 與圖 5.5 所示。
圖 5.4 水位 20m 之穩態地下水壓力水頭與水位模擬結果 壓力水頭 水位 0.00 5.00 10.00 15.00 20.00 0.00 5.00 10.00 15.00 20.00 25.00 30.00 0.00 5.00 10.00 15.00 20.00 0.00 5.00 10.00 15.00 20.00 25.00 30.00 x-direction (m) z- direction (m) 5.00 10.00 15.00 20.00 25.00 30.00 壓力水頭 5.00 10.00 15.00 20.00 25.00 30.00 水位 z- direction (m)
另外,當 AB 邊界之水位維持 10m 不變下,CD 邊界之初始水位為 20m,且 CD 邊界之水位在 24 小時內,線性上升至 25m,則坡地之非 穩態地下水壓力水頭之模擬結果,如圖 5.6 所示。由圖 5.4 至圖 5.6 可 知,發展之模式可合理地模擬穩態與暫態之坡地地下水流。 圖 5.6 非穩態地下水壓力水頭模擬結果 x-direction (m) z- direction (m) 0.00 5.00 10.00 15.00 20.00 0.00 5.00 10.00 15.00 20.00 25.00 30.00 t = 0 0.00 5.00 10.00 15.00 20.00 0.00 5.00 10.00 15.00 20.00 25.00 30.00 t = 12 hrs 0.00 5.00 10.00 15.00 20.00 0.00 5.00 10.00 15.00 20.00 25.00 30.00 t = 24 hrs 0.00 5.00 10.00 15.00 20.00 0.00 5.00 10.00 15.00 20.00 25.00 30.00 steady state
5.1.4 模式之降雨入滲測試 最後測試模式模擬坡地降雨入滲之功能,如圖 5.3 所示,坡地相關 地質參數與 5.1.3 節相同。BC 邊界為不透水邊界,AB 與 DC 邊界為定 水頭邊界,AD 邊界為滲流邊界。當 AB 與 CD 邊界之水位分別保持為 10m 及 15m,且 24 小時降雨量 500mm 之條件下,x = 12.5m 及 x = 7.5m 處地下水壓力水頭在高程方向上隨時間變化之模擬結果如圖 5.7 所 示。由圖 5.7 可知,降雨初期時,地下水壓力水頭主要受到垂直方向的 入滲影響。然後,坡地上方所入滲之降水,經由側向之流動,漸漸影 響 地 下 水 壓 力 水 頭 。 降 雨 停 止 後 , 地 下 水 壓 力 水 頭 重 新 分 佈 (redistribution)。另外,x = 12.5m 且高程分別為 z = 14m、17m 與 20m 處之地下水壓力水頭隨時間之模擬結果,如圖 5.8 所示。
0 10 20 30 40 -6 -4 -2 0 2 0 10 20 30 40 -6 -4 -2 0 2 0 10 20 30 40 -8 -6 -4 -2 0 2 時間 (h) 壓 力 水 頭 (m) z = 14 m z = 17 m z = 20 m 壓 力 水 頭 (m) 時間 (h)
圖 5.9 五彎仔地區地下水流模擬區域圖 (青山工程顧問公司 , 2006 )
5.2 五彎仔地區地下水流模擬
利用上述發展之地下水流模式,率定與驗證五彎仔地區之地下水 流。根據民國 93 年 6 月 2 日至 95 年 6 月 8 日間(見青山工程顧問有限 公司 96 年報告),觀測所得之最低水位作為參數率定之用,最高水位則 作為參數驗證之用,如圖 5.9 所示。模擬時,以 04-4 觀測之水位為右 端邊界條件,左端則以南獨座溪為邊界,且設定地下水位高程與地表 同高,坡面邊界設定為不透水邊界,底部則為流量邊界且流速平行於 坡 面 。 模 擬 格 點 間 距 x 14m與 z 5.7m, 土 壤 之 飽 和 體 積 含 水 量 41 . 0 s ,殘餘體積含水量 r 0.06,進氣潛能因子 0.08,孔徑指數 1.8 N 。在穩態假設下,利用試誤法調整水力傳導係數大小,使模擬之 水位儘量符合觀測所得之最低水位。再利用率定所得之水力傳導係 數,及 04-4 觀測之最高水位為邊界條件,模擬最高水位分佈,以驗證 參數之正確性。率定與驗證結果顯示,土壤水力傳導係數介於 1×10-5 至 4×10-5 m/s 間,且地下水位模擬結果與實測結果如圖 5.10 所示。由 圖 5.10 可知,本研究發展之地下水流模式可合理地模擬五彎仔地區之 地下水位分佈情況。 低水位 550 600 650 700 750 800 850 computation measurement 550 600 650 700 750 800 850 computation measurement 高水位 05-7 B-6 B-5 05-3 C-9 C-12A進一步利用率定與驗證之參數,模擬辛樂克颱風期間,地下水位面 隨時間之變化過程。辛樂克颱風之降雨資料,如圖 5.11 所示,選擇模 擬時間由 9 月 13 日零時至 9 月 14 日 12 時,共 48 小時。模擬時,假 設左邊邊界之水位維持不變下,右邊邊界於 48 小時內,初始水位面隨 時間上升至高程為 793.7m 處,地下水位面隨時間變化之模擬結果,如 圖 5.12 所示。 圖 5.11 辛樂克颱風降雨資料 z- direction (cm) 200 400 600 400 500 600 700 800 900 t = 24 h t = 48 h
第六章 結論與建議
本計畫為藉由光纖感測技術發展邊坡監測系統,並應用於現場 量測與測試,以及配合現場數值模擬來模擬邊坡地下水流分佈,數值 模擬中之參數準確性,為透過現場監測系統監測數據作為數值模式參 數率定來源,以利後續大範圍模擬分析,並且可由現場降雨資料得知 地下水流分佈情況,再配合邊坡數值穩定分析,可即時得知現場邊坡 安全因數,以提供相關政府單位決策參考依據。而計畫期間中已發展 出分佈式光纖光柵水壓計與安裝封層技術測試、節理式偏斜儀改良及 現場安裝、可感應大變形之BOTDR光纖拉伸計,以及重力式傾斜儀 等,另外,在光纖感測解讀系統方面,也改良光纖自動化擷取設備, 如增加了高容量不斷電系統與低瓦數之工業型電腦及穩定3G網路傳 輸系統,並且在辛樂克與莫拉克颱風期間內,成功發揮監測的功效, 掌握現場即時監測數據,並證明傳統監測技術的不足,藉由此次研究 成果可提供日後相關研究及監測技術一新穎方法,而以下為今年度本 研究計畫詳述之結論與建議說明。6.1 結論
1. 光纖光柵水壓與地層移動分佈式自動監測系統整合之可行性與 耐用性已得到驗證,可從辛樂克與莫拉克颱風期間內,現場監測 數據得知。 2. 因在惡劣環境時,無法靠人為至現場量測,故分佈式自動水壓監 測有其價值與必要性。6.2 建議
1. 以現場監測結果,若日後需施作排水整治工法時,其最佳之排水 廊道約在 50m 以下。 2. 由現場水壓觀測井(NCTU-03)及地下水流分析結果,其降雨入滲 對於地層內部水壓為非靜態水壓之分佈,故分佈式水壓監測技術 之推廣有行必要性。6.3 計畫成果效益說明
1. 傳統監測儀器較易受電磁波干擾及雷擊的損壞,藉由光纖不受電 磁波干擾、體積小、不受雷擊及遠距離分佈式量測特性,可大幅 提升監測系統之準確性與耐久性,降低成本。 2. 藉由阿里山五灣仔區域地下水數值模型,得知該區域地下水流分 佈與流向,以作為日後該區域整治方向與監測孔位配置及深度之 參考依據。 3. 研發國人自製光纖自動化解讀儀器,降低成本。 4. 建立光纖式地滑與水壓監測系統,提供阿里山五彎仔公路段安全 性指標。 5. 建立阿里山五彎仔公路段地下水數值模型,提供該區域之地下水 流向與分佈。 6. 藉由該場址光纖式監測系統測試成果,可提供各相關研究單位參 考,逐漸取代傳統電子式監測儀器。 7. 增進政府與學術研究機構之合作關係,培育相關領域之專業人 才。附錄一
交通部運輸研究所合作研究計畫(具委託性質)
期中
期末報告審查意見處理情形表 計畫名稱:全光纖式邊坡穩定監測系統整合與現地應用測試(3/4) 執行單位:交通大學防災與水環境研究中心 參與審查人員 及其所提之意見 合作研究單位 處理情形 本所計畫承辦單位 審查意見 (一)吳副總工程司進興 (公路總局): 1. 據了解五彎仔地區公 路總局已委託顧問公 司辦理傳統傾斜管監 測地滑中,報告中建 議能有與研究本案監 測 資 料 做 比 對 之 敘 述。 2. 報告 P.3-5,各曲線所 代表的時間「一期間 如 071026~071119」? 請確認,另配合各歷 時 水 壓 , 建 議 將 該 「時」之當地降雨量 比對列出。 謝謝委員建議,目前已取得 阿里山公路段第五區養護工 程處,委託青山顧問公司, 所作之延續監測計畫報告, 而監測報告資料之數據只到 97 年 10 月,並會以這段期 間重大事件(颱風、暴雨) , 現 場 監 測 儀 器 所 測 得 之 資 料,進行本研究後續地下水 流 之 邊 界 條 件 之 來 源 , 另 外,關於傾斜管之資料,因 監測點位與深度之不同,只 能作滑動趨勢之比對。 P.3-5 之圖 2.3 所表示為自 NCTU-03 水 壓 觀 測 井 於 2007/10/26 裝設完成後,例 如 071026~07/11/19 代表這 段期間內,NCTU-03 各深度 水壓之變化,因本計畫案並 無裝設雨量站,必須取得其 他研究單位所裝設之雨量站 資料,本研究會以主要颱風 同意 同意參與審查人員 及其所提之意見 合作研究單位 處理情形 本所計畫承辦單位 審查意見 (二)高組長邦基 (公路總 局養路組): 1. 如何決定適當之水壓 分佈監測位置,可再 予以說明。 2. 水壓計內增設溫度計 之效用,請再予以補 充說明。 3. 貴校建置之全光纖邊 坡監測系統後續仍應 注意於大型深層滑動 NCTU-03 水壓觀測井之位置 選擇,為根據青山顧問公司 所作之監測計畫報告中,該 區域地質非常破碎,且報告 中 將 此 區 域 分 為 兩 主 要 斷 面 , 斷 面 上 有 許 多 監 測 孔 位,另一方面,本研究主要 以 B-B 斷面作為地下水流數 值 模 擬 驗 證 斷 面 , 而 NCTU-03 位置為此模擬之邊 界條件。(可參考第一年度計 畫報告內容所作說明) FBG 水壓計內部設置溫度計 主要目的為修正感測器會因 外在溫度變化,使得感測器 之讀數會受溫度產生變化, 故 FBG 水 壓 計 所 測 得 之 FBG 改變量,須扣除溫度影 響部分,才可計算實際之壓 力值。 謝謝委員建議,本研究案為 4 年期研究,將為密切注意 可能發生之大型滑動,對於 同意 同意 同意
參與審查人員 及其所提之意見 合作研究單位 處理情形 本所計畫承辦單位 審查意見 (三)陳處長進發 (公路總 局第二區養護工程處) 1. 阿里山五彎仔路段治 理分 2 期 5 階段,其 中第 3 階段係施作集 水井降地下水位。本 研究案與傳統式水壓 監測器應可再具體區 分兩者不同處,以本 研究案應可分析出地 下水流滲流路徑,以 利集水井或橫向排水 管精準佈設排水,達 到邊坡穩定功效,建 議可增進此一效益。 (四)汪副處長海鄂 (公路 總局重大橋樑工程處): 1. 在 P.1-3 本年度計畫 主要工作內容 2. 傳 輸系統之改良,但在 P.1-4 計畫執行進度說 明中並無顯示出來, 應在 P.1-4 進度 1.2; 不斷電源系統,採用 低耗電量(約 15W)工 業型電腦屬之,應加 目 前 現 場 地 下 水 流 數 值 模 型 , 已 進 行 參 數 率 定 與 驗 證,且根據 NCTU-03 水壓監 測井數據結果,深層處水壓 變化較大,最大變化可達到 200kPa 的 變 化 (20m 水 頭 高),可見若現場若需增設排 水井或排水廊道時,建議可 能 深 度 約 在 50m 以 下 ( 以 NCTU-03 監測點高程),所以 現場監測資料,將影響現場 地 下 水 流 模 擬 結 果 之 可 靠 度,若模型更加完善時,應 可作為後續整治工程之參考 依據與邊坡穩定分析之水位 及水壓輸入參數來源。 謝謝委員對於報告所提供之 建議,對於委員所說之兩點 事項,已予以進行修正及說 明清楚。 同意 同意
參與審查人員 及其所提之意見 合作研究單位 處理情形 本所計畫承辦單位 審查意見 2. 在 5-1 初步結果 3.目 前已完成 10 組光纖光 柵 水 壓 計 與 封 裝 與 P.5-2 後續進度說明 2. NCTU-04 水壓觀測孔 位裝測及 10 組光纖光 柵水壓計安裝應為同 一 事 項 , 應 說 明 清 楚,否則很容易誤會 有 20 組光纖光柵水壓 計,建議 5-1 初步結果 3. 修正為目前已完成 預定裝置在 NCTU-04 水壓觀測孔之 10 組光 纖光柵水壓計。 3. P.1-4 與 P.5-2 部分用 詞應統一。 (五)林教授三賢 (國立臺 灣海洋大學河海系): 1. 計 畫 執 行 期 限 請 更 正。 2. 3-4 頁,"受全球氣候 感謝委員之建議,對於後續 所增設之 NCTU-04 水壓觀 測井部分說明,會從新修改 用詞,以避免造成審查委員 們之誤解。 感謝委員建議,相關報告內 容會詳加檢查,並統一用 詞。 計畫執行期限,已予以修 正。 對於"全球氣候暖化影響 同意 同意 同意 同意
參與審查人員 及其所提之意見 合作研究單位 處理情形 本所計畫承辦單位 審查意見 3. 第四章,分析 4-8 頁之 剖面,不均質及不等 向性效應是否影響很 小。 (六)吳先生鎮封 : 1. 傳統式電子式水壓計 與光纖光柵水壓計有 何不同之處,請說明。 2. 截至目前為止,五灣 仔地區之滑動量是多 少? ~~~以下空白~~~~~ 目前所作之地下水流數值 模擬,僅考慮均值與等向 性,假設其影響性小。 傳統電子式水壓計與光纖 光柵水壓計之主要差別於 電子式感測器容易受到電 磁波干擾問題(當傳輸訊號 過長時),電路易受潮而損 壞,對於長時間監測效果不 高,不易多點量測。 關 於 這 次 光 纖 偏 斜 儀 (FBG-SD) 在 IHMT-200m 傾斜觀測管中,在莫拉克颱 風時,其變形量約 2mm 左 右。 ~~~~以下空白~~~~~ 同意 同意 同意
附錄二
交通部運輸研究所合作研究計畫(具委託性質)
期中期末報告審查意見處理情形表 計畫名稱:全光纖式邊坡穩定監測系統整合與現地應用測試(3/4) 執行單位:交通大學防災與水環境研究中心 參與審查人員 及其所提之意見 合作研究單位 處理情形 本所計畫承辦單位 審查意見 (一)吳副總工程司進興 (公路總局): 1. P.2-3 圖 2.2 各監測儀 器 有 不 同 類 別 ( 如 光 纖光柵傾斜儀、水壓 計、傳統傾斜儀、水 壓 觀 測 孔 ) 建 議 以 不 同圖示表示。 2. P.3-13、P.3-14,圖 3.10 有重複。 3. 本年度報告內,對光 纖光柵傾斜儀之監測 結果似未說明。亦缺 乏新監測法與傳統傾 斜 儀 監 測 結 果 之 比 對。(即是滑動趨勢) 謝謝委員建議,於期末報告 完稿中,以不同圖式來區別 各監測儀器。 感謝委員指正,已修正於期 末報告完稿。 本計畫在莫拉克颱風期間 內,均有測得現場水壓觀測 井及傾斜觀測管數據,在水 壓監測部分,有明顯變化, 而傾斜管變形部分,僅只有 1~2mm 最大變化量,所以並 未呈現至期末報告中。 同意 同意 同意參與審查人員 及其所提之意見 合作研究單位 處理情形 本所計畫承辦單位 審查意見 4. 圖 2.3 各不同深度水 壓變化曲線所代表期 間很長(如 071026~090809 長達 近二年),其代表意義 如何,請說明。 5. P.5-12 圖 5.10 實際量 測水位與數值模擬計 算所得似有甚大差距 (達 30~50m 高差),將 來各不同地區條件在 實用上是否仍需依實 測數據才能模擬? (二)高組長邦基 (公路總 局養路組): 1. 希 望 未 來 計 劃 結 束 後,能夠由水壓的分 佈量測,達到預警機 制。 圖 2.3 所示水壓變化曲線, 僅代表兩段時間點之各深 度點之水壓變化。例如: 071026 為一初始水壓力,將 090809 所測得的水壓值扣 除初始水壓值,即為這兩時 間點之水壓變化。 地下水流模擬內之參數需 依現場監測資料加以率定 修正後,才可準確模擬現場 地下水流情況,故實用上須 針對不同地點重新率定參 數,後續才可模擬實際情 況。 感謝委員對於本計畫之支 持,本研究團隊將盡最大能 力,在第四年計畫時間內, 以水壓監測資料並透過現 場地下水流模擬分析,以求 得現場邊坡滑動與水壓之 關係,提供初步建議之預警 同意 同意 同意
參與審查人員 及其所提之意見 合作研究單位 處理情形 本所計畫承辦單位 審查意見 (三)陳處長進發 (公路總 局第二區養護工程處) 1. 圖 4.1 應係 24 小時累 積雨量值,並宜敘明地 區降雨量(資料來源)。 2. 雨量與水位上升之統 計分析圖,可提供雨量 警戒基準值。 3. 以集水井內之橫向集 水管為例,常因滲流帶 動 200mm 粒徑以下之 土壤而塞住濾層致失 效,本研究是否考量。 (四)汪副處長海鄂 (公路 總局重大橋樑工程處): 1. 應可將 1.2 計畫工作項 目說明及 1.3 計畫執行 進度說明合而為一,兩 者似乎尚有不能相互 配合之處,合而為一可 以說得更清楚。 本降雨量資料來源為逢甲 大學提供,其雨量站架設位 置於監測小屋附近,而圖 4.1 為展示 24 小時累積雨量 值。 感謝委員建議,目前本研究 還未由降雨量與現場水壓 變化關係,提供一警戒值, 但於明年度計畫中,將完成 現場地下水流分析,以提供 雨量與水壓之關係。 感謝委員建議,集水井目 的 為 降 低 現 場 地 下 水 位,其流量較大,容易帶 走土壤顆粒,而水壓量測 功能與其有差異,故濾層 不易造阻塞,儘可能內部 有細菌孳長。 感謝委員建議,已依照委員 建議修正於期末報告完稿 中。 同意 同意 同意 同意