大型三維重建之模型對齊-使用Velodyne雷射掃描儀
69
0
0
全文
(2)
(3) 大型三維重建之模型對齊-使用 Velodyne 雷射掃瞄儀. 指導教授:陳佳妍 博士 國立高雄大學資訊工程學系 學生:林映辰 國立高雄大學資訊工程學系碩士班. 中文摘要 隨著三維運算技術及其應用迅速的發展,對物件形體之數位化工作的需求與日俱 增。相較於小型物件,大型物件的三維重建工作在資料量、精確性上都極具挑戰性。雷 射測距掃瞄為一種快速而精確的三圍重建方法,其快速掃瞄大片面積、不易受環境影響 的高精確性,使其成為大型物件三維重建工作的首選方法。本文使用一具高精度的 Velodyne 雷射掃瞄儀,配合 ICP 剛性對齊演算法,建立了一套快速有效的大型物件重建 系統。ICP(Iterative Closest Point)演算法被廣泛的應用於三維重建和機器人定位工作上 (SLAM),是剛性對齊的主導性演算法。本文對原始 ICP 進行實作改良,使用最差忽略 (Worst rejection) 、特徵擷取(Feature extraction)以及跳圈等方式,大幅降低 ICP 演算法 的累積誤差,使其能夠有效的對雷射掃瞄取得的大量資料進行對齊,最終建立精準的大 型物件模型。. 關鍵字:三維重建、雷射測距掃瞄、疊代最近點、機器人定位. i.
(4) Large scale 3D scene registration using data from Velodyne LIDAR Advisor: Dr. Chia-Yen Chen Department of Computer Science and Information Engineering National University of Kaohsiung Student: Ying-Chen Lin Department of Computer Science and Information Engineering National University of Kaohsiung. Abstract With the rapid development of 3D computing technology, the acquisition of range data has become a necessary activity for numerous applications. Large scene reconstruction, which aims to gather depth information of the environment by the use of some range sensors, is a challenging problem. It is considered challenging because the scale of scanned data is relatively large than any regular sized object. Laser rangefinders are perhaps the most frequently used sensors in the applications of scene reconstruction. In our work a 3D reconstruction system that equips with a Velodyne LIDAR is built. In order to improve the range and the density of reconstruction the system implements a modified Iterative Closest Point (ICP) algorithm. The combination of various strategies such as worst rejection and feature extraction is proposed to achieve significant improvement. The experiment shows that the heuristic registering algorithm is capable to align multiple LIDAR scans that consist of large number of 3D coordinates in a faster and more accurate manner compared to conventional ICP algorithm.. Keywords: 3D reconstruction, laser rangefinder, Iterative Closest Point (ICP), Simultaneous localization and mapping (SLAM). ii.
(5) 謝. 誌. 本論文能順利完成,幸蒙陳佳妍博士兩年來的悉心指導與諄諄教誨。除了在研究 上給予我方向,對於觀念的啟迪、資料的收集、架構的修正與做學問及生活的態度也提 供了許多寶貴的意見。亦師亦友的角色不但幫助我增長知識、增添閱歷,更豐富了我的 人生行囊。所謂「一日為師,終身為父」,老師的指導與教誨,學生銘記在心,謹此獻 上最深的敬意與謝意。 此外,感謝義守大學陳基發博士多次在我於研究上遭遇瓶頸時,不吝惜的提出指 點,使我的研究得以順利進行,也感謝簡祥任學長熱心提供程式經驗與協助,讓我獲益 良多。 而口試期間,承蒙口試委員賴文能博士、殷堂凱博士於疏漏處指正,使得本論文 更臻完備,在此謹深致謝忱。另外,感謝修業期間眾多同學和朋友們的鼓勵與幫助,大 家的關懷,給予我心靈上的滋養,讓我有勇氣和毅力完成研究所修業。 最後,由衷感激我的家人,感謝父親、母親以及姊姊給予我經濟上的支持與精神 上的鼓勵,讓我無後顧之憂,得以專注的完成碩士學位,在此致上誠摯的謝意。. iii.
(6) 目. 錄. 中文摘要................................................................. i Abstract................................................................ ii 謝. 誌................................................................. iii. 目. 錄.................................................................. iv. 圖目錄.................................................................. vi 第一章 1.1 1.2 1.3 1.4 第二章. 緒論 ........................................................... 1 前言..............................................................1 研究目的..........................................................1 研究方法..........................................................1 論文架構..........................................................2 三維重建技術 ................................................... 3. 2.1 接觸式掃瞄........................................................3 2.2 非接觸式被動掃瞄..................................................4 2.2.1 立體光學法(Photometric stereo)..................................4 2.2.2 輪廓成型法(Shape from contours).................................4 2.2.3 雙眼視覺法(Binocular stereo vision).............................4 2.3 非接觸式主動掃瞄..................................................5 2.3.1 結構光法(Structured light)......................................5 2.3.2 調變光法(Modulated light).......................................5 2.3.3 雷射測距法(Laser rangefinder)...................................5 第三章 3.1 3.2 3.3 第四章. ICP(ITERATIVE CLOSEST POINT)演算法 ............................. 7 剛性對齊(RIGID ALIGNMENT) ...........................................7 原始ICP演算法.....................................................8 ICP對齊圖解......................................................10 系統架構 ...................................................... 12. 4.1 系統流程.........................................................12 4.1.1 Velodyne HDL-64E 雷射掃瞄儀....................................13 4.1.2 實驗環境.......................................................15 4.1.3 轉換掃瞄儀網路封包.............................................16 4.1.4 近遠點刪除與環狀干擾...........................................17 4.1.5 ICP對齊與前導位移矩陣..........................................19 4.1.6 三維重建與機器人定位...........................................21 iv.
(7) 4.2 原始ICP演算法與累積誤差..........................................22 4.2.1 採樣誤差.......................................................22 4.2.2 視野遮蔽.......................................................23 4.2.3 累積誤差.......................................................23 第五章. 改良ICP ....................................................... 26. 5.1 最差忽略法.......................................................26 5.1.1 定義忽略.......................................................26 5.1.2 忽略比例.......................................................27 5.1.3 最差忽略法流程.................................................28 5.1.4 最差忽略範例...................................................30 5.1.5 最差忽略ICP實驗結果 1 ..........................................31 5.1.6 最差忽略ICP實驗結果 2 ..........................................35 5.2 特徵擷取法.......................................................39 5.2.1 特徵攝取法流程.................................................39 5.2.2 八叉樹.........................................................40 5.2.3 取特徵法實驗結果 1 .............................................43 5.2.4 取特徵法ICP實驗結果 2 ..........................................46 5.3 跳圈法與累計誤差.................................................49 5.4 實驗結果討論.....................................................52 第六章 6.1 6.2. 結論與未來研究方向 ............................................ 58 結論.............................................................58 未來研究方向.....................................................58. 參考文獻................................................................ 59. v.
(8) 圖目錄 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖. 2.1-1 CMM接觸式掃瞄儀..................................... 3 2.3-1 Kinect 遊戲控制器使用結構光法....................... 5 2.3-2 各種雷射測距掃瞄儀.................................. 6 3.1-1 由同場景中不同位置取得的大型物件資料 ................ 7 3.3-1 ICP圖解說明........................................ 11 4.1-1 實驗架構流程圖..................................... 12 4.1-2 Velodyne HDL-64E 雷射掃瞄儀........................ 13 4.1-3 實驗設備全圖 ....................................... 14 4.1-4 移動以取得周遭景物資料............................. 14 4.1-5 法學院長廊......................................... 15 4.1-6 法學院長廊......................................... 15 4.1-7 法學院前廣場....................................... 16 4.1-8 法學院前廣場....................................... 16 4.1-9 Velodyne雷射掃瞄儀原始資料封包..................... 17 4.1-10 環狀干擾.......................................... 18 4.1-11 刪除進遠點........................................ 18 4.1-12 ICP對齊迴圈流程圖................................. 19 4.1-13 對齊基準隨對齊的進行而遠離........................ 20 4.1-14 掃瞄儀移動路徑.................................... 21 4.1-15 掃瞄儀移動路徑.................................... 21 4.2-1 採樣誤差........................................... 22 4.2-2 視野遮蔽........................................... 23 4.2-3 累積誤差 ........................................... 24 4.2-4 誤差變化........................................... 25 5.1-1 最差忽略法ICP ...................................... 28 5.1-2 最差忽略法誤差範例................................. 30 5.1-3 最差忽略ICP重建法學院走廊整體上視圖................ 31 5.1-4 最差忽略ICP法學院長廊.............................. 32 5.1-5 法學院長廊實景..................................... 32 5.1-6 法學院長廊平面圖................................... 33 5.1-7 最差忽略法ICP法學院長廊模型........................ 33 5.1-8 最差忽略法ICP法學院長廊............................ 34 5.1-9 最差忽略法,ICP法學院長廊ICP誤差值................. 34 5.1-10 最差忽略法ICP重建法學院前廣場上視圖............... 35 5.1-11 最差忽略法ICP法學院前廣場模型..................... 36 5.1-12 法學院前廣場實景.................................. 36. vi.
(9) 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖 圖. 5.1-13 最差忽略法ICP法學院前廣場......................... 5.1-14 法學院正門實景.................................... 5.1-15 法學院前廣場ICP誤差值............................. 5.1-16 最差忽略法ICP..................................... 5.2-1 取特徵法ICP........................................ 5.2-2 八叉樹分割空間..................................... 5.2-3 八叉樹結構......................................... 5.2-4 八叉樹快速分群..................................... 5.2-5 最底層子節點....................................... 5.2-6 提出密集資料作為特徵進行ICP對齊.................... 5.2-7 取特徵法ICP重建法學院長廊整體上視圖................ 5.2-8 取特徵法ICP法學院長廊.............................. 5.2-9 取特徵法ICP法學院長廊模型.......................... 5.2-10 取特徵法ICP,法學院長廊ICP誤差值.................. 5.2-11 取特徵法ICP,法學院長廊ICP誤差值.................. 5.2-12 取特徵法ICP法學院前廣場上視圖..................... 5.2-13 取特徵法ICP法學院前廣場........................... 5.2-14 取特徵法ICP法學院前廣場........................... 5.2-15 取特徵法ICP,法學院前廣場ICP誤差值................ 5.2-16 取特徵法ICP,法學院前廣場ICP誤差值................ 5.3-1 跳圈法實作法學院前廣場,........................... 5.3-2 跳圈法法學院前廣場................................. 5.3-3 法學院前廣場....................................... 5.3-4 對齊失敗範例....................................... 5.4-1 法學院前廣場ICP誤差值,黑色為原始ICP............... 5.4-2 法學院前廣場ICP誤差值.............................. 5.4-3 法學院前廣場ICP疊代次數............................. vii. 37 37 38 38 39 40 41 41 42 42 43 44 44 45 45 46 47 47 48 48 49 50 50 51 52 53 53.
(10) 第一章 緒論 1.1 前言 近年來由於新技術的提出與硬體的進步,使得電腦三維技術蓬勃發展,各種 產業對三維技術的倚賴,亦隨著電腦的普及而日增月益。三維重建為掃瞄物件型 體,將其變成數位化資訊並進行重現。目前已廣泛的應用在各領域,舉凡電影、 遊戲等多媒體產業以及汽車、造船等高科技工業,甚至考古、博物館等文化產業 等。三維重建的需求與日俱增,與其相應的是:新技術與理論不斷推陳出新,且 大多著重於如何增加三維重建的速度與準確性,如何快速且精準地建立三維模型 給使用者,是此領域的重要課題。. 1.2 研究目的 目前三維重建目標多為小型至中型物件,例如國內近年來推行的博物館數位 典藏工作,或醫學領域方面醫療模型的製作。而針對大型物件例如車、船、建築 物等物體的重建,則因在資料量上過於巨大,以及取得高精確性資料的難度,使 其成為複雜且耗時的工作。本文將針對大型物件三維重建工作進行探討,最終提 供一組有效且精準的大型三維重建系統。. 1.3 研究方法 本文使用一具高精度的 Velodyne 雷射掃瞄儀取得周圍環境的深度資料。取得 資料後以 ICP(Iterative Closest Point)演算法整合資料,ICP 演算法具有簡單並被證 明有效的特色,已成為現今解決三維剛性對齊問題的主要演算法,但應用在大型 物件對齊上仍有需克服之難題。ICP 演算法發表至今已有許多的衍生及改進變形被 提出,本文將參考幾種變形,並改良 ICP 演算法使其能精準對齊大型三維物件。. 1.
(11) 1.4 論文架構 本文分為六章,內容安排如下: 第一章為緒論,介紹研究動機與目的、研究方法之概述及論文主要架構。 第二章為三維重建,介紹現存各種三維重建技術,說明使用雷射測距法對大 型物件進行三維重建之優勢。 第三章為 ICP 演算法,介紹原始 ICP 演算法的主要步驟及效果。 第四章為系統架構,首先將介紹實驗系統架構及處理流程,之後探討原始 ICP 應用於大型物件對齊所面臨的問題。 第五章為改良 ICP,針對四章所述傳統 ICP 之缺點,將 ICP 演算法進行改良。 並展示改良後之實驗結果,由實驗結果討論各方法的優缺點。 第六章為結論與探討未來研究方向。. 2.
(12) 第二章 三維重建技術 本章對現有之三維重建技術進行介紹,包括本文所使用之雷射測距技術 三維重建(三維 shape recovery)是掃瞄擷取現實空間中物件的距離深度資料, 在虛擬空間中建立與實物相同的立體模型。目前重建技術種類繁多,依照掃瞄方 式可分為接觸與非接觸式兩種,而非接觸式又可分為為主動及被動兩類。以下將 對幾種主流三維重建技術進行介紹,並且指出使用雷射掃瞄儀進行三維重建的優 勢。. 2.1 接觸式掃瞄 接觸式三維重建通常透過探針實際碰觸物件表面來取得深度資料,如 CMM(Coordinate Measuring Machine)機械式座標掃瞄儀(圖 2.1-1)。此方法精確度 極高,廣泛使用於製造業與工業逆向工程。不過其需要使用探針接觸物件的測量 方式,可能對掃瞄物建造成損壞,因而無法使用於脆弱物件如古物或遺跡上。另 外緩慢的掃瞄速度使其不適合應用在大型物件重建上。. 圖 2.1-1 CMM 接觸式掃瞄儀. 3.
(13) 2.2 非接觸式被動掃瞄 非接觸式被動掃瞄不投射任何能量到物件上,而是以攝取物件周邊資訊進行 深度測量,其中多為使用可見光的機器視覺方法。此類方法較不需要昂貴的儀器, 不過其精確度通常較接觸式或主動式掃瞄為低。. 立體光學法(Photometric stereo). 2.2.1. 立體光學法在 80 年代由 R.J Woodham 提出[10],簡單的立體光學法使用三個 不同角度的光源,以單一相機拍攝物件被三個光源分別照射下的情況,拍攝完成 後再綜合三張照片並使用光學中的完美漫射(perfect diffusion)模型解出物件表面 的梯度向量(gradients),經過向量場的積分後即可得到物件的深度資訊。. 輪廓成型法(Shape from contours). 2.2.2. 依據物件在二維影像中的輪廓進行三維重建[11]。需擷取大量不同角度下物件 的輪廓,通常做法是放在固定位置的轉盤上,每次旋轉一小角度後進行擷取,再 經由影像處理去除背景得到輪廓線。此方法簡單快速,缺點是若物件某些特性(如 凹洞等)無法在輪廓上顯現,就會在重建過程中遺失。. 2.2.3. 雙眼視覺法(Binocular stereo vision). 雙眼視覺法使用兩台平行放置的相機對物件進行拍攝,模仿人類視覺系統的 方法得到深度資訊[12]。藉由兩台相機的相對位置以及影像中重疊部分,計算出深 度資訊。此方法仰賴於好的演算法進行像素匹配分析(correspondence analysis),其 目的在於找出兩張影像中像素的相對關係,也是此方法精確度的關鍵。. 4.
(14) 2.3 非接觸式主動掃瞄 相對於被動式掃瞄,主動式掃瞄對物件投射出能量,並藉由反射資訊來獲取 深度資料。常用的投射能量包括可見光、雷射、超音波與 X 射線等。 結構光法(Structured light). 2.3.1. 將雙眼立體視覺法中的一台相機替換成投影機[8]或雷射二極體,改以主動掃 瞄的方式進行像素匹配分析。將固定模式的圖樣投射至物件上,根據圖樣的變形 情況以及相機與投影機的相對位置,計算出物件的深度資訊。. 圖 2.3-1 Kinect 遊戲控制器使用結構光法. 調變光法(Modulated light). 2.3.2. 與結構光法相似,調變光法使用了高速攝影機來擷取短時間內光線的強弱 [6]。連續周期性的調整光線的強弱,藉由觀察影像每個像素的亮度變化與光的相 位差,即可推算深度資訊。. 雷射測距法(Laser rangefinder). 2.3.3. 雷射測距使用時差測距法(Time-of-Flight)獲得與物建的距離深度。將雷射投射 至物件上,再經由探測器接收反彈訊號並記錄時間,由於光速為已知條件,透過 測量此雷射脈衝往返一趟的時間即可得到距離資訊。雷射光的速度極快,因此雷 射 測 距 的 準 確 度 相 當 高 , 例 如 本 文 所 使 用 的 HDL-64 Velodyne 雷 射 掃 瞄 儀. 5.
(15) (LIDAR),其有效掃瞄範圍高達半徑 100m 以上,而誤差僅小於 2cm。相對於機器 視覺方法,使用雷射時差測距較不易受物體表面材質影響,也不易受到外在環境 光線的影響。另外由大量雷射發射頭排成陣列可快速的掃瞄大範圍面積,快速、 準確以及高可靠度-使得雷射測距三維重建成為重建大型物件的首選方案。. 圖 2.3-2 各種雷射測距掃瞄儀 上:空載地型掃瞄儀 右:固定式地型掃瞄儀 下:手持式雷射掃瞄槍. 6.
(16) 第三章 ICP(Iterative Closest Point)演算法 此章節介紹剛性對齊,並介紹在此領域中具領導性的 ICP 演算法。. 3.1 剛性對齊(Rigid alignment) 三維剛性對齊為三維重建以及機器人定位中極為關鍵的技術,其目的在不改 變三維點雲中各點相對位的前提下,對齊兩筆具重複性的三維資料,假若有兩筆 三維資料中各點相對位置完全相同,則好的剛性對齊演算法將能計算出使兩者完 全重合所需的旋轉角度以及位移距離。 由於大型物件尺寸龐大,需要在多個位置進行掃瞄以得到物件的完整資訊, 並且配合一套有效的剛性對齊演算法對龐大的資料進行整合。. (a). (b). (c) 圖 3.1-1 由同場景中不同位置取得的大型物件資料(a)、(b), 以及剛性對齊後的資料(c). 7.
(17) ICP 演算法由 Besl 和 Mckay 於 1992 年提出[9],有著簡單且完全依據幾何的 特色,是目前解決三維模型剛性對齊問題中具主導性的演算法,其基本概念為最 小化兩群三維資料點中各點的距離,以達到剛性對齊的目的,以下對原始的 ICP 演算法進行介紹。. 3.2 原始ICP演算法 ICP 演算法由給定兩群三維資料點開始,以下假設有兩筆完全相同的資料, X {xi } 以及 Y { yi } ,兩筆資料各有自己的初始座標系,ICP 演算法的目標是找 到一個轉換矩陣,使 X 資料透過此矩陣運算後,能夠最大限度的與其對齊基準資 料 Y 重合,基本原理為使下列(1)式得到最小值。. n. f ( R, p) || Rxi p yi ||2. (1). i 1. X i 1 RX i p. (2). 其中 xi 為 X 中的資料點, yi 為其在 Y 中找到之最近點,也就是其配對點,透過此 公式我們將得到一個旋轉參數 R 以及一個位移參數 p ,將其代入(2)式使 X 資料旋 轉位移而接近參考資料 Y 的位置,其中 R 和 p 可以整合描述為 T 矩陣(3),另外 ICP 使用了一組平均誤差參數(4)來評比每次疊代的優劣(本文以後所有提到之 ICP 誤差 皆指此平均誤差)。. R t 0. p 1 . (3). n. || Rx p y ||. 2. i 1. i. i. /n. (4). 我們繼續再對新的 X 重複最小化(1)及更新(2)的步驟,則經過不斷的疊代運算後 X 8.
(18) 將會收斂至一安定位置,因假設 X 與 Y 資料內各點相對位完全相同,兩筆資料將 完全重疊使誤差參數為 0,整個過程可被描述為(5)式,最終得到使 X 移動至 Y 的 對齊矩陣 T (6)。. Y tntn 1...t1 X. (5). T tntn 1...t1. (6). 演算法 1 T = ICP(X; Y; T0 ). 1:. T T0. 2:. while t > do. 3: 4:. for k = 1 : n do xk Txk. 5:. end for. 6: 7:. for k = 1 : n do xk = FindClosestPoint (X ; yk ). 8:. end for. 9:. xm . 1 xk n. 10:. ym . 1 yk n. 11: 12:. for k = 1 : n do xk xk xm ; yk yk ym. 13:. end for. 14:. [U, S, V ] = SVD( yk xk ). 15: 16:. R = UV T p xm Rym. 17: 18:. R p t 0 1 T tT. 19: end while 20: return T 9.
(19) 3.3 ICP對齊圖解 設一二維空間中有兩筆資料,分別為黑色方塊以及白色圓圈。兩筆資料內成 員的相對位置完全相同,僅在二維空間中處於不同位置。以黑色方塊為對齊基準, 透過ICP演算法使白色圓圈移動位置,最終至兩筆資料完全重疊。圖 3.3-1為ICP步 驟圖解。. 10.
(20) 3.最小化所有配對點之間的距離,並使 白色圓圈資料群旋轉位移至新位置. 4.重複第二步驟,尋找最近的點 進行配對. 5.重複迭代至白色圓圈位置達到收斂. 圖 3.3-1 ICP 圖解說明. 在了解了 ICP 的主要精神及原理後,第四章我們將進行實驗系統架構與儀器 的介紹。原始 ICP 應用在剛性對齊上有著絕佳的效果,不過在對齊大型物件龐大 的資料上還是有著待解決的問題,我們將在第四章進行討論。. 11.
(21) 第四章 系統架構 此章節我們先行介紹實驗的系統架構和掃瞄儀器,並列出實做系統時的改 良,使取得的資料能夠套用至 ICP 演算法中,最後探討傳統 ICP 在實做大型物件 對齊上遇到的問題。. 4.1 系統流程 本文使用了一組高精度的雷射掃瞄儀Velodyne HDL-64E配合ICP演算法進行 重建。由掃瞄儀獲得資料,經過處理後成為標準單圈資料。再交由ICP演算法進行 對齊校正,並最終完成大型物件重建。圖 4.1-1為系統流程圖,以下小節對各步驟 分別進行介紹。. 圖 4.1-1 實驗架構流程圖 12.
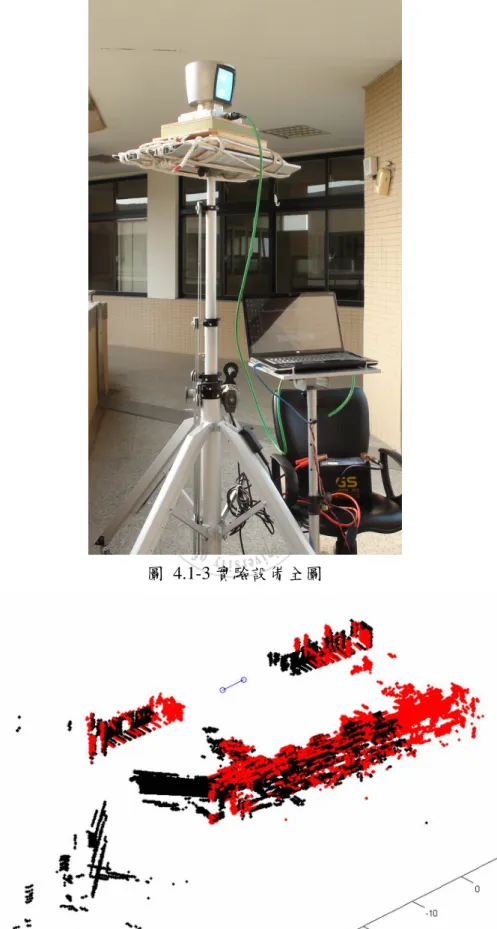
(22) Velodyne HDL-64E 雷射掃瞄儀. 4.1.1. 本文使用的掃瞄儀為Velodyne HDL-64E(圖 4.1-2),是一具高精度的雷射掃瞄 儀。具有 4 組雷射陣列,每組各 16 個雷射發射頭以及 16 個接收器,共 64 組發射 頭與接收器。自動水平 360 度旋轉掃瞄蒐集環場距離資訊,下列為儀器基本參數 規格:. 圖 4.1-2 Velodyne HDL-64E 雷射掃瞄儀. . 水平可視角度 360 度。. . 垂直可視角度 26.8 度。. . 最長有效測量距離 120m,和反射體表面有關。. . 最短可有效測量距離 0.9m。. . 誤差範圍<2cm。. . 旋轉速度 600 RPM,每秒 10 圈。. . 儀器體積:長 223.5mm ×寬 231.1mm ×高 257.3mm。 我們將掃瞄儀設置在穩固的移動式腳架上並慢速步行推進,使其對週遭環境. 進行掃瞄,以獲得不同位置掃瞄所得的資料。如圖 4-3 所示,黑色與紅色分別為兩 個位置所獲得的資料,藍色線條為移動路徑。慢速步行前進速度不超過每秒鐘 1 公尺,配合掃瞄儀每秒 10 圈的快速轉動掃瞄,擷取周遭環境詳細資料。 13.
(23) 圖 4.1-3 實驗設備全圖. 圖 4.1-4 移動以取得周遭景物資料. 14.
(24) 實驗環境. 4.1.2. 為了測試系統的強健度,本文實驗以兩個各具特色的場景為實驗樣本。一個 是筆直的法學院長廊(圖 4.1-5、圖 4.1-6),此場景資料量大而密集,擁有眾多的直 角與平面,一側為教室牆面和窗戶,另一側則是矮護牆與直柱,兩柱間隔為. 3.6576m(12ft)。. 圖 4.1-5 法學院長廊. 圖 4.1-6 法學院長廊. 另一場景為法學院前廣場(圖 4.1-7、圖 4.1-8),為緊鄰道路的半圓形廣場,半 徑約為 25m,場景開放而平坦,周圍有建築物及樹木環繞。. 15.
(25) 圖 4.1-7 法學院前廣場. 圖 4.1-8 法學院前廣場 轉換掃瞄儀網路封包. 4.1.3. 掃瞄儀原始資料為網路封包,其封包格式如圖 4.1-9,我們須將其轉換為三維 空間的點雲資料。首先根據掃瞄儀的校正參數(讀取頭角度),將封包中每個雷射讀 取頭的距離資訊轉換成三維座標。再依照當時的角度旋轉排列到以掃瞄儀為中心 的三維空間中,並且以 360 度一圈為單位進行切割。所得即為以一圈為單位,掃 瞄儀為中心的三維點雲資料。. 16.
(26) 圖 4.1-9 Velodyne 雷射掃瞄儀原始資料封包 近遠點刪除與環狀干擾. 4.1.4. 掃瞄儀的最短有效距離是 0.9 公尺,因此將近點當作雜訊刪除是必要的。另一 個必須刪除近點的原因,我們稱之為環狀干擾。掃瞄儀在 360 度旋轉後所掃瞄到 的地板以及天花板部分,將會出現一圈圈整齊的環狀資料(圖 4.1-10),此密集且規 則排列的資料將會非常顯著的影響ICP的對齊。不幸的是在大多情況下地板或天花 板是沒有特徵的平面,因此這些環狀資料並不具價值,僅會造成ICP對齊的偏差, 我們需將其移除以避免干擾。. 17.
(27) 圖 4.1-10 環狀干擾:以掃瞄儀為中心,在無特徵的平面上掃瞄 產生的密集環狀資料,圖中藍色圓點為掃瞄儀位置 依據掃瞄儀的規格,掃瞄距離最遠為 120m,並且可能受物體的表面材質影響。 加上遠點通常為瑣碎,價值較低的小量資料,根據場景不同,通常將遠點刪除距 離定為 80~100m左右,若大於此距離即判定為遠點刪除。原始資料刪除近點遠點 後,即為實驗對齊所使用的的標準單圈資料(圖 4.1-11),我們將其依序放入ICP迴 圈中進行對齊。. 圖 4.1-11 刪除進遠點:紅色為刪除的部分 18.
(28) 4.1.5. ICP對齊與前導位移矩陣 圖 4.1-12為ICP對齊迴圈流程,以前一圈資料為對齊基準,計算出將後一圈資. 料移動至對齊位置所需的位移及旋轉矩陣。套用轉換矩陣使後一圈資料移動至正 確位置,並成為更次一圈資料的對齊基準。所有資料依序丟入ICP迴圈中進行對 齊,最終整合為一個完整的模型。. 圖 4.1-12 ICP 對齊迴圈流程圖 每筆資料座標空間皆是以掃瞄當時掃瞄儀的位置為原點,由於對齊的資料龐 大,根據場景需求,第一圈資料和最後一圈資料的原點位置,可能差距數十甚至 數百公尺以上。如圖 4.1-13所示,紫色箭頭代表所有新進資料的初始位置,隨著 圈數的增加,新近資料與其參考資料(也就是前一筆已對齊資料,以深藍色代表) 的距離將會越來越遠,造成ICP需要更多的疊代次數才能將其移動置正確位置,如 此一來處理時間將隨著圈數而顯著增加。 19.
(29) 圖 4.1-13 對齊基準隨對齊的進行而遠離 為克服此問題,我們設置了一組轉換矩陣將新進資料移動到參考資料的附近。. X 1... X n 為一組掃瞄所得的單圈資料,ICP 對齊時以第一圈資料 X 1 中掃瞄儀的位置 為整個模型座標系的原點,後續的 X 2 ... X n 皆透過 ICP 對齊而轉換到 X 1 的座標空間 中。 T1 為 X 1 及 X 2 的對齊矩陣,依此類推 T1...Tn 為 ICP 所得之對齊矩陣,定義一前 導轉換矩陣 F (7)記錄累積的位移資訊,讓新進資料能夠透過此矩陣快速的移動到 參考資料旁(8)再進行 ICP 對齊。. Fn T1T2 ...Tn 1. (7). X n X n Fn. (8). 演算法 2. 1:. F1 I. 2: for k = 1 : n do 3:. Tk = ICP(X; Y; Fk ). 4:. Fk 1 Fk Tk. 5: end for. 20.
(30) 三維重建與機器人定位. 4.1.6. 本文的目標在於重建大型物件三為模型,而所使用的方法與目標其實與. SLAM(Simultaneous Location And Mapping)機器人定位與繪圖如出一轍[13]。在使 用 ICP 演算法計算周圍景物對齊的同時,也同樣的對掃瞄儀的位置做了定位的動 作。. 圖 4.1-14 掃瞄儀移動路徑. 圖 4.1-15 掃瞄儀移動路徑. 圖 4.1-14和圖 4.1-15中紅色線段為一次掃瞄中掃瞄儀的移動路徑。由此路徑 記錄,我們可以回推算出當時掃瞄儀移動的距離與步行推進速度。 21.
(31) 4.2 原始ICP演算法與累積誤差 使用原始 ICP 驗算法對齊大型物件所取得的資料,會面臨嚴重偏向的問題。 我們知道在對齊兩筆完全相同的資料時,原始的 ICP 演算法可以達到誤差為 0 的 準確對齊。但在對齊不同的資料時,因為資料本身有差異,誤差不可能為 0,ICP 只能盡可能找出能使兩筆資料誤差最小化的位置。 採樣誤差. 4.2.1. 因機器的旋轉振動或是外在景物的變化,掃瞄儀對環境掃瞄採樣的資料每圈 皆不相同,而ICP在對齊兩筆不同的資料時,平均誤差不可能為 0(兩筆資料不可能 完全重疊)。為了取得對齊收斂的標準,我們測量了掃瞄儀在定點採樣情況下的平 均誤差。進行 100 圈定點掃瞄採樣後,以第一圈為基準進行對齊,此誤差即為因 掃瞄儀採樣所產生的固定且無法克服之誤差,如圖 4.2-1所示。我們以此誤差當 作ICP的收斂對齊標準,當ICP收斂至此標準後即判定對齊完成。. 圖 4.2-1 採樣誤差:對相同環境進行 100 次定點掃瞄後, 以第一圈為基準計算出平均誤差為 0.0468 公尺. 22.
(32) 視野遮蔽. 4.2.2. 當掃瞄儀接近樹木、牆壁或柱子等障礙物後,視野被大幅度遮蔽,連續的兩 圈資料差異度將會變大。圖 4.2-2為視野遮蔽示意圖,紅黑兩個方塊代表兩圈資 料掃瞄儀的位置,藍色方塊則是障礙物。可見在移動後,紅色位置掃瞄儀無法掃 瞄到原本黑色位置時掃瞄到的黑點,而多出了原本黑色位置掃瞄不到的紅點。此 問題將使兩筆資料差異變大,增加ICP對齊的難度,造成較大的誤差。. 圖 4.2-2 視野遮蔽. 累積誤差. 4.2.3. 如前(4.2.1)所述,雷射掃瞄儀是對周圍的環境進行採樣動作。即使是掃瞄儀固 定不動,進行定點掃瞄的情況,採樣也不可能會取得完全相同的資料。兩筆資料 間一定會存在因每次掃瞄儀本身的震動,或周圍景物的變動所造成的誤差,而相 對於定點採樣,掃瞄過程中掃瞄儀是動態的不斷前進,再加上視野遮蔽的問題, 各筆資料間的差異將會更大。 兩筆資料間的差異,將會造成 ICP 對齊上的誤差。使用原始 ICP 時往往無法 達到採樣誤差的對齊標準。ICP 迴圈中,每圈資料皆與前圈資料進行對齊,因此誤 差將隨著對齊次數不斷的累積,最終造成嚴重的偏移。 23.
(33) 圖 4.2-3 累積誤差 圖 4.2-3中黑、紅、綠、藍、紫分別代表 10、20、30、40、50 圈使用原始ICP 對齊後的走廊資料,可以明顯的看出隨著圈數的往前推進,ICP結果與正確位置越 來越遠。雖然兩兩間的誤差並不大,前 30 圈資料位置還算正確,但隨著掃瞄儀的 前移,在接近柱子時因視野被柱子遮蔽範圍變大,導致前後兩筆資料的差異變大(圖. 4.2-4),造成了較大的誤差,累積到了第 50 圈時已和正確位置相差將近兩公尺的距 離。. 24.
(34) 圖 4.2-4 誤差變化:因靠近柱子產生的視野遮蔽,使兩筆資料間的 差異性變大,導致 ICP 誤差增加. 總結來說,處理兩筆有差異的資料超出了原始 ICP 的設計目的,而大量的資 料更將此問題放大:在小型物件的三維重建中,以手持式雷射掃瞄為例,大多為 數筆至數十筆的資料對齊,累積誤差並不嚴重,甚至能很容易的透過人工來點選 特徵或手動進行位置矯正。而大型物件如建築物的重建往往會有數百甚至上千筆 資料,我們知道累積誤差會與對齊次數成正比,而且如此大量的資料是不可能用 人力來進行對齊的。 為了取得高精度的模型,勢必得降低累積誤差,其方法有二:找出兩筆資料 中的相同部分進行 ICP,以降低對齊誤差,或者減少 ICP 對齊次數。在下一章節我 們將對 ICP 進行改良,使其能有效的對齊大型物件。. 25.
(35) 第五章 改良 ICP 針對上一章節所提出 ICP 對齊大型物件的問題,本章將實作幾種改良方法: 最差忽略(5.1)、特徵擷取(5.2)以及跳圈(5.3),改良 ICP 使其能精準的對齊大型物件。 最後依據實驗結果探討幾種改良法的優劣。. 5.1 最差忽略法 最差忽略(Worst rejection)為一種 ICP 的改良方法,適用於對齊兩組不同的資 料,最差忽略法在進行 ICP 對齊時會忽略部分較差的配對點,僅以留下的配對點 做對齊演算。. 定義忽略. 5.1.1. 忽略的定義通常有下列幾種. . 忽略誤差距離大於某固定值. . 忽略最差的 n%配對點. . 以標準差作為忽略基準[14]. . 忽略孤點[1]. 其中,忽略距離大於某固定值的作法較為呆版,不適用在現實多變的環境 中,以標準差為基準得先進行分析點與點間的距離,較耗費時間,忽略孤點的作 用則較偏向於去除雜訊。 相較之下忽略最差的 n %配對點,才是適合兩筆相近資料的忽略模式。在一次 次 ICP 的疊代過程中將配對距離最差的最差忽略掉,此作法相當於“去除兩筆資料 間的相異部份”,而留下重疊的部份進行對齊[2]。. 26.
(36) 忽略比例. 5.1.2. 每次疊代的忽略比例左右了最差忽略 ICP 演算法的結果,一般常見的忽略比 例如[7]所建議,每次忽略 10%最差資料是較好的選擇,但事實上定量的忽略比例 很難能達到成功的對齊。如[4]所述,定量忽略的問題,在於我們無法得知多少的 忽略比例是合適的。過小的忽略比例無法完全忽略掉兩筆資料的相異部分,使對 齊失敗;過多的忽略比例則可能將關鍵的對齊特徵也忽略掉,最終落入區域最佳 解的困境。 確切的忽略幅度根據場景而有所不同。在多變的環境下相鄰兩筆資料差異自 然會增大,需要較大的忽略比例,例如車水馬龍的街道。相較之下安靜無人的博 物館只需要較小的忽略比例,就能達到去除兩筆資料相異部分的效果。除此另外, 掃瞄儀移動速度越快,兩筆資料間距離差距越遠,也會造成較大的資料差異。 為了解決定量忽略的問題,我們在實驗中將忽略比例做動態的調整,每次 ICP 達到收斂後,以是否達收斂標準為判斷依據,決定是否增加忽略比例,自 0%開始 以每次固定的幅度慢慢向上提升,直至 ICP 達到收斂標準為止。我們也對上升幅 度 1%~20%進行實驗,上升幅度越大 ICP 收斂越快,但也越容易造成過度忽略的 情況。最終根據經驗法則將忽略上升幅度定為 5%。 若是忽略過多的配對,ICP 可能因對齊資料過少而落入區域最佳解的情況,因 此我們另外定義一個忽略上限,當忽略幅度達到此上限而未達到收斂標準,我們 仍將其視為最終結果。此上限依據多次實驗的經驗法則,通常定為 50%,依掃瞄 場景的不同略有變化。場景變動越大,掃瞄儀前進速度越快,則須調高忽略上限, 反之則降低。. 27.
(37) 最差忽略法流程. 5.1.3. 圖 5.1-1為使用最差忽略法之ICP流程圖. 圖 5.1-1 最差忽略法 ICP. 進入 ICP 疊代迴圈後,首先忽略比例為 0%,以避免因兩圈資料初始位置相距 過遠,而導致一開始就將重要對齊參考忽略掉的情況。當 ICP 達到第一次收歛後, 忽略比例開始在每次收歛後以固定的幅度向上增加,直到 ICP 收斂至對齊標準, 或達到忽略上限為為止。. 28.
(38) 演算法 3 T = Worst rejection ICP(X; Y; T0 ). 1:. T T0. 2: while t > do 3: 4:. for k = 1 : n do yk Tyk. 5:. end for. 7: 8:. for k = 1 : n do xk = FindClosestPoint (X ; yk ). 8:. end for. 9: 10:. if convergence && under threshold delete worst n % from xk. 11:. delete worst n % from yk. 12:. end if. 13:. xm . 1 xk n. 1 yk n. 14:. ym . 15: 16:. for k = 1 : n do xk xk xm ; yk yk ym. 17:. end for. 18:. [U, S, V ] = SVD( yk xk ). 19: 20:. R = UV T p xm Rym. 21: 22:. R p t 0 1 T tT. 23: end while 24: return T. 29.
(39) 最差忽略範例. 5.1.4. 圖 5.1-2 最差忽略法誤差範例. 圖 5.1-2為一採用最差忽略法ICP的誤差變動,呈現了一次ICP對齊過程中誤差 值的變動。我們以跳圈的方式,直接將第 45 圈資料和第 50 圈資料進行ICP對齊, 收斂標準則採用定點所得的採樣誤差(4.2.1)。可見兩筆資料因相隔甚遠,差異相當 大,第一次進行ICP對齊時誤差達 1.3m以上,隨著一次次疊代的進行,誤差值逐漸 收斂,但還是遠大於收斂標準。 於是,在第一次達到收斂後忽略機制啟動,忽略最差的 5%配對後誤差大幅降 低,並在第四次忽略並收斂後忽略比例為 20%,誤差為 0.0292m,低於採樣誤差. 0.0459m 而達到收斂標準,ICP 對齊完成。. 30.
(40) 最差忽略ICP實驗結果 1. 5.1.5. 下列實驗結果(圖 5.1-3~圖 5.1-9)為使用忽略法ICP重建之法學院長廊,共 80 圈資料,近點刪除距離為 12m,遠點刪除 80m。忽略增加幅度為 5%,忽略上限為. 50%,收斂標準為採樣誤差 0.022m,總平均誤差為 0.0197m。對齊完成後以 10 圈 為間隔取出其中 8 圈資料合併為完成模型,總點數 271095。. 圖 5.1-3 最差忽略 ICP 重建法學院走廊整體上視圖, 黑、紅、綠、藍、紫分別代表 1、20、40、60、80 圈資料. 31.
(41) 圖 5.1-4 最差忽略 ICP 法學院長廊. 圖 5.1-5 法學院長廊實景. 32.
(42) 圖 5.1-6 法學院長廊平面圖. 圖 5.1-7 最差忽略法 ICP 法學院長廊模型,總點數 271095. 33.
(43) 圖 5.1-8 最差忽略法 ICP 法學院長廊,ICP 誤差值,總平均誤差 0.0197m. 圖 5.1-9 最差忽略法,ICP 法學院長廊 ICP 誤差值, 以掃瞄半徑 80m 為基準,總平均誤差 0.024%. 34.
(44) 最差忽略ICP實驗結果 2. 5.1.6. 下列實驗結果(圖 5.1-10~圖 5.1-16)為使用忽略法ICP重建之法學院前廣場,共. 120 圈資料,近點刪除 18m,遠點刪除 80m。忽略增加幅度為 5%,忽略上限為 60%, 收斂標準為採樣誤差 0.051m,總平均誤差為 0.0434m。對齊完成後以 30 圈為間隔 取出其中 5 圈資料合併為完成模型,總點數 122537。. 圖 5.1-10 最差忽略法 ICP 重建法學院前廣場上視圖, 黑、紅、綠、藍、紫分別代表 1、30、60、90、120 圈資料 此場景中近點皆為空曠無物的平坦地面,為了提高 ICP 的準確性,我們將近 點刪除的距離擴大到 18m,以消除無特徵的環狀干擾,讓 ICP 能夠以較遠的景物 進行對齊,圖 5-10 為以掃瞄儀為基準的上視圖,可見由於掃瞄儀些微左傾,造成 右邊景物位置較深。 。 35.
(45) 圖 5.1-11 最差忽略法 ICP 法學院前廣場模型,總點數 122537. 圖 5.1-12 法學院前廣場實景. 36.
(46) 圖 5.1-13 最差忽略法 ICP 法學院前廣場. 圖 5.1-14 法學院正門實景. 此場景是開放空間,在開放空間中,環境的不定因素增多,如人、車的經過, 樹木的晃動等,皆會讓資料間的差異變大,進而影響 ICP 的誤差。此場景我們同 樣使用定點測量的採樣誤差 0.051m,並將忽略上限增加到 60%,但結果如圖 5-14 所示,有許多圈資料在到達忽略上限後仍未能達到收斂標準。. 37.
(47) 圖 5.1-15 法學院前廣場 ICP 誤差值,總平均誤差 0.0434m. 圖 5.1-16 最差忽略法 ICP,法學院前廣場 ICP 誤差值, 以掃瞄半徑 80m 為基準,總平均誤差 0.054%. 38.
(48) 5.2 特徵擷取法 雷射儀掃瞄速度為 10 圈/秒,以慢速步行前進速度並不快,前一圈資料的特徵 將有很大的機率出現在後一圈資料中,因此兩筆資料做特徵擷取(Feature extraction) 是一種可行的解決方案。最差忽略法慢慢裁剪兩筆資料相異的部分,而特徵擷取 採取了相反的策略:在一開始就將兩筆資料中可能相同的部份提取出來。 由於不同環境中的資料特徵差異性極大,如本文實驗所挑選場景:狹窄而充 滿垂直面的長廊,又或者是空曠平坦的廣場。為適應各種場景,我們將特徵單純 定義為資料最密集的部份,以應付多變的真實環境。. 特徵攝取法流程. 5.2.1. 圖 5.2-1為特徵擷取法ICP流程圖 Singular data set Feature extraction Feature data set Basis data set. ICP. Convergence. No. Increase rejecting width. Yes No Reach threshold. No. Y ICP complete. 圖 5.2-1 取特徵法 ICP 39. Reach rejecting limit Yes.
(49) 演算法 4 T = Feature extraction ICP(X; Y; T0 ). X Feature extraction( X ). 1:. 2: for k = 1 : n do. Tk = Worst rejection ICP(X; Y; T0 ). 3:. 5: end for. 首先對對齊資料進行八叉樹分群,快速的找出資料中的密集點群作為特徵。 再將特徵取出後與對齊基準進行最差忽略的 ICP 對齊。相較於直接使用最差忽略 法,加入特徵提取的動作可以大幅度的縮小資料量,並且在較少的疊代次數內達 到收斂,加快了 ICP 的對齊速度。. 八叉樹. 5.2.2. 八叉樹(octree)為一樹狀結構,結構中每個父節點固定有八個子節點,我們使 用此特性,以“節點中資料量是否大於門檻值”為分割標準,進行三維空間中資料的 快速分群。 圖 5.2-2 和圖 5.2-3 為八叉樹示意圖,首先以原始資料為起點,以中心位置. (0,0,0)為基準將三維空間分割為八個子空間,子空間中的資料即分屬其八個子節 點。再依序檢查子結點中的資料量,若大於門檻值則繼續分割產生下一層的八個 子節點,如此重複分割至所有最底層子節點資料量皆小於門檻值為止。. 圖 5.2-2 八叉樹分割空間 40.
(50) Original Data. Level 1. Level 2. Level 3. 圖 5.2-3 八叉樹結構,黑色節點代表內含資料大於門檻值可再分割. 圖 5.2-4為一單圈資料進行八差樹分群的結果,分割標準為 50 個資料,每一 個藍色方格代表一個節點,若方格內資料點數大於 50,則繼續往下分割成更小的 方格。. 圖 5.2-4 八叉樹快速分群. 41.
(51) 進行八叉樹分群後,最底層的子節點,也就是最小的方塊(圖 5.2-5),即為該 筆資料點雲中最密集的部分。圖 5.2-6紅色部分,便是單圈資料經過八叉樹分群後 所得的密集特徵,我們將這些節點內的資料作為特徵提出並進行ICP對齊。. 圖 5.2-5 最底層子節點即為包含資料量小於門檻值(50)的密集資料群. 圖 5.2-6 提出密集資料作為特徵進行 ICP 對齊. 42.
(52) 取特徵法實驗結果 1. 5.2.3. 下列實驗結果(圖 5.2-7~圖 5.2-11)為使用取特徵法ICP重建之法學院長廊,共. 80 圈資料,近點刪除距離為 12m,遠點刪除 80m。八叉樹分群門檻值為 50 點,忽 略增加幅度為 5%,忽略上限為 40%,收斂標準為採樣誤差 0.022m,總平均誤差 為 0.0194m。對齊完成後以 10 圈為間隔取出其中 8 圈資料合併為完成模型,總點 數 271095。. 圖 5.2-7 取特徵法 ICP 重建法學院長廊整體上視圖. 43.
(53) 圖 5.2-8 取特徵法 ICP 法學院長廊. 圖 5.2-9 取特徵法 ICP 法學院長廊模型,總點數 271095. 44.
(54) 圖 5.2-10 取特徵法 ICP,法學院長廊 ICP 誤差值,總平均誤差 0.0194m. 圖 5.2-11 取特徵法 ICP,法學院長廊 ICP 誤差值, 以掃瞄半徑 80m 為基準,總平均誤差 0.0236%. 45.
(55) 取特徵法ICP實驗結果 2. 5.2.4. 下列實驗結果(圖 5.2-12~圖 5.2-16)為使用忽略法ICP重建之法學院前廣場,共. 120 圈資料,近點刪除 18m,遠點刪除 80m。八叉樹分群門檻值為 50 點,忽略增 加幅度為 5%,忽略上限為 60%,收斂標準為採樣誤差 0.051m,總平均誤差為. 0.0447m。對齊完成後以 30 圈為間隔取出其中 5 圈資料合併為完成模型,總點數 122537。. 圖 5.2-12 取特徵法 ICP 法學院前廣場上視圖. 46.
(56) 圖 5.2-13 取特徵法 ICP 法學院前廣場,總點數 122537. 圖 5.2-14 取特徵法 ICP 法學院前廣場. 47.
(57) 圖 5.2-15 取特徵法 ICP,法學院前廣場 ICP 誤差值,總平均誤差 0.0447m. 圖 5.2-16 取特徵法 ICP,法學院前廣場 ICP 誤差值, 以掃瞄半徑 80m 為基準,總平均誤差 0.056%. 48.
(58) 5.3 跳圈法與累計誤差 累積誤差會隨著對齊次數而增加,ICP 無法達到百分之百的正確對齊,隨著對 齊次數的增加,其誤差不斷的累積。前面提出的最差忽略以及取特徵法,皆為改 良 ICP 演算法,以降低每次對齊的誤差來縮小累積誤差的幅度。另一個簡單的方 法就是以跳圈的方式,降低對齊的次數。 跳圈是不以連續的所有資料進行對齊,僅從採樣所得資料中以固定圈數為間 隔,挑出其中幾圈進行對齊。資料圈數變少意味著較少的對齊次數,以及較少的 累積誤差。由於兩圈資料間的差異過大,不適合取特徵法使用,我們使用最差忽 略法來搭配跳圈。下列實驗結果(圖 5.3-1~圖 5.3-3)為法學院前廣場以 100 圈為間 隔,配合最差忽略法所得之實驗結果。. 圖 5.3-1 跳圈法實作法學院前廣場, 黑、紅、綠、藍分別為第 1、200、400、600 圈資料. 49.
(59) 圖 5.3-2 跳圈法法學院前廣場. 圖 5.3-3 法學院前廣場. 50.
(60) 跳圈法可降低對齊次數,達到降低累計誤差的效果,但仍然有未能克服的問 題。採用跳圈法後,不僅每圈對齊資料間的距離變長,由於視野遮蔽(4.7)產生的資 料差異也會被放大。 環境與前進速度以及即跳圈間隔幅度影響到跳圈法的對齊,圖 5.3-4為一跳圈 對齊失敗範例,黑色與紅色資料間隔為 10 圈,可以明顯看到因為視野遮蔽而產生 的資料差異。在離開柱子的遮蔽範圍後,紅色資料掃瞄得到大片前圈未出現的資 料(圖中綠圈部分),黑色資料中的中庭樹木則因為進入遮蔽而完全消失(圖中藍圈 部分),兩筆資料差異過大而造成對齊失敗。. 圖 5.3-4 對齊失敗範例. 此範例中掃瞄儀僅向前移動了 0.6636m,時間差僅僅一秒,卻因為靠近柱子(移 動路徑與遮蔽柱最近點約 0.6m)造成大片掃瞄視野被遮蔽,使得對齊失敗。移動速 度快的物體也有可能造成資料差異,比如道路上的車輛,若以 100 圈為間隔進行 跳圈對齊,則 10 秒的時間已足夠讓上一圈出現的車子消失在下一圈的資料中。 另外,不跳圈的狀況下兩圈資料差異較小,我們以定點所得的平均採樣誤差 來做為忽略法的收斂標準。但跳圈後兩筆資料間的差異增大,勢必無法達到此收 斂標準。若為了達到標準而提高忽略比例,則演算法可能會忽略過多的資料,陷 入區域最佳解而讓對齊失敗。 51.
(61) 承上所述,我們知道讓 ICP 能正確的對齊的前提,是讓兩筆資料盡可能的相 似,而跳圈則讓兩筆資料間的差異變大。若跳圈間隔過大,許多場景細節可能因 跳圈而被忽略,其中可能包括兩筆資料間的重要對齊參考;間隔過小則失去其減 少累積誤差的效果。外加上無法訂出有依據的收斂標準,讓使用跳圈法重建場景 得要經過許多次的反覆測試,才能達到理想的效果。. 5.4 實驗結果討論 最差忽略法能大幅度的降低每次ICP對齊的誤差,進而縮小累積誤差,建立精 準的大型物件模型。取特徵法則在最差忽略的基礎上,加入了前置的取特徵步驟, 降低ICP所需處理的資料量,讓重建工作更加快速。相較於原始ICP,此兩種方法 的對齊誤差皆大幅降低(圖 5.4-1),使ICP能有效作用於大型物件重建工作。. 圖 5.4-1 法學院前廣場 ICP 誤差值,黑色為原始 ICP, 紅色為最差忽略法,藍色為取特徵法. 52.
(62) 圖 5.4-2 法學院前廣場 ICP 誤差值,紅色為最差忽略法,藍色為取特徵法. 圖 5.4-3 法學院前廣場 ICP 疊代次數,紅色為最差忽略法,藍色為取特徵法. 53.
(63) 圖 5.4-2和圖 5.4-3為同樣條件參數下,使用兩種法進行法學院前廣場重建所 得的資料。可見在精確度上,最差忽略法與取特徵法並無太大差異。而在速度上 取特徵法具有一定的優勢,能在較少的疊代與忽略次數下達到收斂。並且取特徵 的動作降低了資料量,使每次的疊代運算時間大幅下降。 但在應付兩圈無明顯相同特徵的資料上,取特徵法的精準度將大幅下降,比 如跳圈法的實作。我們無法在相隔 100 圈,時間間隔 10 秒,距離 15.18m 的兩圈 資料中找到足夠的對齊特徵,以至於取特徵法無法配合跳圈法實作。而最差忽略 法穩紮穩打的特性,使得跳圈得以實作。透過一次次疊代不斷的去除兩圈資料相 異的部分,最終得到精確的對齊。. 表 5.1 忽略法與取特徵法比較. Error rate(m). Iteration times. Loop. Worst rejection. Feature extraction. Worst rejection. Feature extraction. 3.. 0.068884. 0.06997. 109. 89. 4.. 0.062331. 0.067105. 81. 87. 5.. 0.025808. 0.029009. 91. 70. 6.. 0.036656. 0.033978. 177. 70. 7.. 0.033546. 0.033907. 99. 95. 8.. 0.023908. 0.028521. 108. 80. 9.. 0.030372. 0.0316. 91. 71. 10.. 0.026356. 0.029048. 73. 79. 11.. 0.03688. 0.037174. 128. 93. 12.. 0.044821. 0.043075. 124. 93. 13.. 0.032929. 0.031603. 107. 81. 14.. 0.050064. 0.048942. 135. 109. 15.. 0.027696. 0.029502. 75. 74. 16.. 0.027005. 0.028072. 95. 76. 17.. 0.032271. 0.030166. 108. 86. 18.. 0.030797. 0.029599. 86. 73. 19.. 0.033829. 0.034534. 136. 97. 20.. 0.026512. 0.026873. 94. 74. 54.
(64) Error rate(m). Iteration times. Loop. Worst rejection. Feature extraction. Worst rejection. Feature extraction. 21.. 0.031737. 0.033282. 101. 74. 22.. 0.032323. 0.034253. 96. 75. 23.. 0.039306. 0.061086. 105. 75. 24.. 0.034897. 0.037691. 101. 81. 25.. 0.049961. 0.045126. 120. 100. 26.. 0.040994. 0.038755. 208. 101. 27.. 0.044215. 0.040623. 114. 72. 28.. 0.036141. 0.030738. 208. 113. 29.. 0.033051. 0.035849. 90. 76. 30.. 0.028234. 0.028383. 53. 57. 31.. 0.028355. 0.028896. 53. 66. 32.. 0.026249. 0.027207. 80. 71. 33.. 0.027051. 0.025661. 108. 97. 34.. 0.031761. 0.033156. 82. 80. 35.. 0.027232. 0.028724. 119. 90. 36.. 0.032992. 0.03389. 138. 89. 37.. 0.031521. 0.029701. 106. 79. 38.. 0.066081. 0.046385. 151. 92. 39.. 0.029257. 0.033226. 105. 92. 40.. 0.028506. 0.027251. 84. 67. 41.. 0.0699. 0.073685. 233. 132. 42.. 0.072571. 0.071771. 152. 99. 43.. 0.066674. 0.067534. 104. 90. 44.. 0.047312. 0.042785. 118. 86. 45.. 0.053487. 0.069559. 137. 112. 46.. 0.069071. 0.073613. 114. 108. 47.. 0.034138. 0.037187. 105. 97. 48.. 0.044591. 0.046455. 138. 119. 49.. 0.061233. 0.066431. 99. 86. 50.. 0.026829. 0.030132. 98. 76. 51.. 0.028689. 0.026623. 104. 66. 52.. 0.035736. 0.038726. 99. 90. 53.. 0.03989. 0.039607. 149. 66. 54.. 0.070698. 0.073196. 124. 87. 55.
(65) Error rate(m). Iteration times. Loop. Worst rejection. Feature extraction. Worst rejection. Feature extraction. 55.. 0.052791. 0.075334. 125. 114. 56.. 0.040802. 0.041313. 137. 107. 57.. 0.067772. 0.068377. 150. 108. 58.. 0.037988. 0.035794. 134. 124. 59.. 0.036111. 0.036713. 80. 69. 60.. 0.042738. 0.045563. 141. 93. 61.. 0.038306. 0.039525. 129. 106. 62.. 0.027717. 0.026884. 53. 52. 63.. 0.033227. 0.033893. 92. 74. 64.. 0.029999. 0.031007. 74. 58. 65.. 0.048801. 0.044475. 191. 129. 66.. 0.072651. 0.073433. 120. 85. 67.. 0.050948. 0.065653. 134. 85. 68.. 0.038656. 0.038379. 99. 65. 69.. 0.037763. 0.037254. 170. 76. 70.. 0.044816. 0.042321. 89. 71. 71.. 0.041804. 0.044883. 123. 98. 72.. 0.057316. 0.072091. 146. 121. 73.. 0.044671. 0.045989. 121. 113. 74.. 0.039964. 0.043383. 104. 85. 75.. 0.035791. 0.036692. 97. 71. 76.. 0.043172. 0.038579. 158. 86. 77.. 0.04023. 0.037984. 109. 72. 78.. 0.077902. 0.08196. 147. 116. 79.. 0.076186. 0.076328. 102. 122. 80.. 0.029684. 0.029969. 132. 78. 81.. 0.070261. 0.074973. 109. 89. 82.. 0.049771. 0.046021. 114. 99. 83.. 0.062696. 0.068125. 132. 99. 84.. 0.060796. 0.050802. 120. 92. 85.. 0.067887. 0.044203. 186. 75. 86.. 0.038423. 0.039009. 109. 90. 87.. 0.036753. 0.035183. 147. 90. 88.. 0.037395. 0.04051. 159. 92. 56.
(66) Error rate(m). Iteration times. Loop. Worst rejection. Feature extraction. Worst rejection. Feature extraction. 89.. 0.055724. 0.071816. 119. 91. 90.. 0.041422. 0.040118. 107. 83. 91.. 0.046107. 0.046064. 122. 89. 92.. 0.039288. 0.046463. 126. 90. 93.. 0.044586. 0.048524. 95. 82. 94.. 0.03024. 0.031799. 102. 74. 95.. 0.074244. 0.050644. 104. 88. 96.. 0.033046. 0.033013. 112. 83. 97.. 0.029396. 0.02881. 63. 81. 98.. 0.029407. 0.029953. 92. 67. 99.. 0.042441. 0.040536. 142. 105. 100.. 0.036963. 0.039572. 99. 88. 101.. 0.040871. 0.041248. 102. 78. 102.. 0.02989. 0.030552. 71. 97. 103.. 0.045304. 0.043777. 127. 105. 104.. 0.037274. 0.040731. 113. 89. 105.. 0.026105. 0.030733. 87. 71. 106.. 0.044051. 0.042598. 135. 79. 107.. 0.054792. 0.055308. 168. 100. 108.. 0.045683. 0.047151. 139. 87. 109.. 0.033287. 0.033493. 127. 73. 110.. 0.038167. 0.036892. 88. 68. 111.. 0.048449. 0.071034. 150. 109. 112.. 0.037881. 0.042463. 106. 67. 113.. 0.073087. 0.077329. 106. 84. 114.. 0.065996. 0.074033. 95. 78. 115.. 0.04256. 0.043381. 143. 91. 116.. 0.04235. 0.045942. 130. 95. 117.. 0.055556. 0.075902. 150. 96. 118.. 0.078141. 0.082121. 152. 112. 119.. 0.045837. 0.048936. 96. 118. 120.. 0.044405. 0.04214. 117. 87. 0.0447. 117.21. 87.86. Average 0.0434. 57.
(67) 第六章 結論與未來研究方向 6.1 結論 本文針對大型物件三維重建工作進行了實作與探討。使用雷射掃瞄儀與 ICP 演算法對大型物件進行重建,克服了實作上的諸多困難。 本文實作了三種 ICP 演算法改良,使其能有效應用在大型物件對齊工作,最 後根據實驗結果探討各方法之優劣。相較與原始 ICP 演算法,最差忽略法 ICP 顯 著降低了累積誤差,始 ICP 演算法得以進行大型物件重建,產生精準的模型。由 最差忽略法衍伸出加入特徵取樣的特徵法 ICP,利用取特徵減少資料量,加快 ICP 運算速度。另外跳圈法則從降低 ICP 次數著手,使重建範圍得以擴大。 除此之外,前導轉換矩陣的加入,使資料能更有效率的進行對齊。而實驗過 程中所遭遇的狀況,讓我們了解到視野遮蔽所產生的問題。以及無特徵平面上的 環狀干擾,因 ICP 對齊特性而造成近點刪除的必要性。 大型物件三維重建為複雜耗時的工作,本文建立了一套有效的大型物件重建 系統。以雷射掃瞄儀取得資料後,交由電腦進行計算處理,透過演算對齊最終取 得精準的三維點雲模型。. 6.2 未來研究方向 由於雷射掃瞄儀在擷取景物資料時,本身的旋轉速度以及前進速度會造成資 料的變形[3],修正此變形問題為未來研究的首要目標。 另外 ICP 演算法在先天上有著無法突破區域最佳解的問題,我們希望配合一 套有效的演算法,比如 ICP 搭配模擬退火演算法[5],在系統中加入偵測及跳脫區 域最佳解的機制,使 ICP 演算法更為可靠,成為更強健的大型三維重建系統。. 58.
(68) 參考文獻 [1] C. Dorai, J. Weng, and A. Jain, “Registration and Integration of Multiple Object Views for 3D Model Constrution,” IEEE Trans. PAMI, Vol. 20, No. 1, pp. 83-89, 1998 [2] C. C. Wang, Simultaneous Localization, Mapping and Moving Object Tracking, PhD thesis, Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, April 2004 [3] H. Seungpyo, K. Heedong, K. Jinwook, “VICP: Velocity updating iterative closest point algorithm,” Proc. ICRA, pp.1893-1898 , 2010 [4] J. Diebel, K. Reuterswärd, S. Thrun, J. Davis, and R. Gupta, “Simultaneous Localization and Mapping with Active Stereo Vision,” Proc. IROS, vol. 4, pp. 3436–3443, 2004 [5] J. Luck, C. Little, and W. Hoff, “Registration of Range Data Using a Hybrid Simulated Annealing and Iterative Closest Point Algorithm,” Proc. ICRA, pp.3739-3744 , 2000 [6] J. P. Godbaz, M. J. Cree, and A. A. Dorrington, “Undue Influence: Mitigating Range-Intensity Coupling in AMCW ‘Flash’ Lidar using Scene Texture,” Proc. IVCNZ, pp. 304-309, 2009 [7] K. Pulli, ”Multiview Registration for Large Data Sets,” Proc. 3DIM, pp.160-168, 1999 [8] M. Ribo, M. Brandner, “State of the art on vision-based structured light systems for 3D measurements,” Proc. ROSE, pp. 2-7, 2005 [9] P. J. Besl, N. D. McKay, “A method for registration of 3D shapes,” IEEE Trans. PAMI, Vol.14, No. 2, pp 239-254, 1992 59.
(69) [10] R. J. Woodham, “Photometric methods for determining surface orientation from multiple images,” shape from shading, MIT Press, pp. 513-531, 1989 [11] R. Klette, K. Schluns, and A. Koschan, Computer Vision:Three-Dimensional Data from Images. Springer, 1998 [12] S. D. Cochran and G. Medioni, “3D surface description from binocular stereo,” IEEE Trans. PAMI, Vol.14(10), pp. 981-994, 1992 [13] S. Rusinkiewicz, M. Levoy, “Efficient Variants of the ICP Algorithm,” Proc. 3DIM, pp. 145-152, 2001 [14] T. Masuda, K. Sakaue, and N. Yokoya, Registration, “Registration and integration of multiple range images for 3-d model construction,” Proc. CVPR, pp. 879–883, 1996. 60.
(70)
數據



+7






Outline
相關文件
(Computable General Equilibrium Model;簡稱CGE模 型)。又因為其應用性高,故也被稱為應用性計算一般均 衡模型(Applied General Equilibrium
4.促進部分工時勞工受到公平對待:日本在 2008 年共有 1407 萬人從事部分 工時,約占全體勞工的 26.1%。而這些部分工時勞工不僅是補充角色,更承擔職 務責任,其付出卻未被等量對待。因此,2008
建模時,若我們沒有實際的物理定律、法則可以應用,我們 可以構造一個經驗模型 (empirical model) ,由所有收集到
自從 Engle(1982)提出 ARCH 模型以來,已經超過 20 年,實證上也有相當多的文獻 探討關於 ARCH 族模型的應用,Chou(2002)將 GARCH
本系已於 2013 年購置精密之三維掃描影像儀器(RIEGL
The empirical results indicate that there are four results of causality relationship between Investor Sentiment and Stock Returns, such as (1) Investor
[7] C-K Lin, and L-S Lee, “Improved spontaneous Mandarin speech recognition by disfluency interruption point (IP) detection using prosodic features,” in Proc. “ Speech
甲型禽流感 H7N9 H7N9 H7N9 H7N9 H7N9 H7N9 H7N9 H7N9 - - 疾病的三角模式 疾病的三角模式 疾病的三角模式 疾病的三角模式 疾病的三角模式
