國 立 交 通 大 學
運輸與物流管理學系
碩 士 論 文
以模擬探針車法進行
號誌化道路旅行時間推估之研究
Estimating the Travel Time on Signalized Arterials by Using Simulated Probe
Vehicles
研 究 生:紀佳伶
指導教授:王晉元 副教授
以模擬探針車法進行號誌化道路旅行時間推估之研究
Estimating the Travel Time on Signalized Arterials
by Using Simulated Probe Vehicles
研 究 生 : 紀佳伶
Student: Chia-Ling Chi
指 導 教 授 : 王晉元
Advisor: Jin-Yuan Wang
國 立 交 通 大 學
運 輸 與 物 流 管 理 學 系
碩 士 論 文
A Thesis
Submitted to Department of Transportation and Logistics Management College of Management
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Traffic and Transportation
July 2014
Hsinchu, Taiwan, Republic of China
i
以模擬探針車法進行號誌化道路旅行時間推估之研究
研究生:紀佳伶 指導教授:王晉元 國立交通大學運輸與物流管理學系(研究所)碩士班摘 要
提供正確的旅行時間,可以讓用路人事先規劃合適的路線、選擇使用的運具,以及決 定出發時間,以達分散車流,紓解交通擁擠的目的。本研發展一套以虛擬探針車為基礎的 旅行時間預測模式,無論是否具有號誌化路口,本模式均適用。本研究所提出的模式,會 依據探針車前方路口的號誌,以及前方路口停等的車輛數、以及與前方障礙物的距離等資 訊,決定探針車輛加減速的行為,並據此計算出所需的旅行時間。本研究利用實際的路網 進行測試,並透過交通控制模擬軟體計算真值,同時在不同的流量情境下測試所提出模式。 根據測試結果,本研究所提出的模式在各種不同的情境下均能有不錯的預測結果,尤其是 在中低流量時,預測的結果更為精確。 關鍵詞:旅行時間預測、虛擬探針車、先進旅行者資訊系統ii
Estimating the Travel Time on Signalized Arterials by Using Simulated
Probe Vehicles
Student:Chia-Ling Chi Advisor:Dr. Jin-Yuan Wang
Department of Transportation and Logistics Management National Chiao Tung University
ABSTRACT
Equipped with accurate travel time information, travelers could make smart and right decisions regarding departure time, carrier choice, and route selection to avoid being trapped in the traffic jams. This research proposes a virtual probe vehicle travel time prediction model for this purpose. This model can be implemented on any road segment with or without signalize intersection. This proposed model determine the behavior of probe vehicle, such as accelerating and decelerating, based on the signal status, queuing length, and the distance to the obstacle. The travel time can be obtained by calculating the time spent by the probe vehicle. This research tests the robustness and accuracy of this model on the real world arterials. A traffic flow simulation software is adopted to yield the true travel time for comparison purpose. Based on the testing results, the performance of the proposed model is accurate under various scenarios, especially when the traffic flow is not high.
iii
誌 謝
在交大的這兩年光陰,一眨眼接近了尾聲,大學推甄時所作的決定,至今更加感到 驕傲。本篇論文得以完成,首先要感謝我的指導老師 王晉元教授。從大學推甄後開始 不遺餘力的教導,無論在課業上、生活上,或是感情上都會和我一起討論想法,遇到挫 折,老師總是給予我方向讓我自己尋找答案找出辦法,論文、程式、課業,甚至周遭的 大小事都能與老師分享。每週的meeting都是既緊張又期待,老師在我心中,就像我的另 一個父親,每每同學提及老師很疼我,心中就會感到很開心,謝謝老師在我的研究生涯 中的指導及鼓勵,我會永遠銘記在心。 在論文口試期間,感謝 蘇昭銘教授以及 黃家耀教授能夠在百忙之中撥空閱讀學生 的文章,並參與論文口試給予相當寶貴的意見與指導,使得學生的論文研究能夠得以更 完整嚴謹,實屬感謝。 兩年的研究生活,感謝所有教導過我的老師及系辦助理提供的協助,以及張宗勝老師 的鼓勵和意見;感謝hoho、阿哲、老頭、小恕、玥心、承勳、阿凡給予我很多幫助,即使 畢業了也一樣關心我們;感謝小倩、淮耀、逸彥、晨祐這幾位同甘共苦的夥伴們,和你們 聊天總是可以讓我很開心,讓苦悶的研究生活多了幾分開心,有你們聽我分享心事、陪我 出去玩真的很感動,我們要當一輩子的家人;感謝學弟妹小佑、東東、佳芸、軒寧、志穎, 和你們在一起總能暢談一番,貼心幽默的你們要繼續保持下去唷。另外感謝阿芳、詩涵、 思思、丁丁,室友們總是幫我很多忙,提供我考試資訊,讓我有個安穩的地方休息,很高 興有妳們在身邊;最後感謝國宣、政翰、博凱、世棟,謝謝你們的陪伴、照顧,在我最需 要的時候出現,在研究之餘能和你們聊天遊玩真的是生活中美好的記憶,謝謝你的貼心以 及和你的回憶。 特別感謝生命中的你 Andy,參與我的生活陪著我度過各個難關,容忍我的脾氣、接受 我的一切,一起經歷了你的當兵、工作,對我無微不至的照顧及呵護,是我在新竹撐下去 的力量,謝謝你和你的家人對我的愛,也希望未來的日子裡,能和你攜手繼續走下去。 最後我要感謝我的家人,謝謝爸爸、媽媽、哥哥,以及天上的奶奶,在我求學期間給 予我最大的鼓勵與支持,讓我感受到家是最溫暖的地方,還有外公、外婆、阿姨、舅舅、 舅媽、表妹們以及姑姑、二伯、表姊所有親人對我的愛戴,你們是我最大的靠山,你們的 疼愛和支持是我成長最大的動力。僅以此論文獻給我敬愛的家人、師長和朋友。 紀佳伶 謹致 2014 年七月盛夏 於交大ITS Labiv
目錄
中文摘要... i 英文摘要... ii 誌謝... iii 目錄... iv 圖目錄... vi 表目錄... vii 一、緒論... 1 1.1 研究背景與動機... 1 1.2 研究目的與範圍... 2 1.3 研究假設... 2 1.4 研究流程與架構... 2 二、文獻回顧... 5 2.1 高速公路旅行時間相關文獻... 5 2.2 號誌化道路旅行時間相關文獻... 7 2.3 小結... 9 三、研究方法... 11 3.1 Liu et al. (2009)研究與本研究異同... 11 3.2 旅行時間推估方法基本原理... 12 3.3 旅行時間推估流程... 14 3.4 資料取得與計算... 15 3.5 虛擬探針車決策... 23 3.5.1 虛擬探針車決策前判斷計算... 23 3.5.2 虛擬探針車反應邏輯... 24 3.6 交通資料定義與車輛偵測器蒐集... 27 3.7 旅行時間推估之計算... 28 四、數值分析... 29 4.1 VISSIM 路網構建 ... 29 4.2 模擬軟體... 31 4.3 模擬所需資料... 32 4.4 模式驗證與分析... 35 4.4.1 評估指標... 35 4.4.2 與實際資料比較結果... 37 4.5 虛擬探針車模擬頻率之影響... 39 五、結論與建議... 45v 5.1 結論... 45 5.2 建議... 46 參考文獻... 47 附錄... 49 簡歷... 56
vi
圖目錄
圖 1.1 研究流程圖 ... 3 圖 3.1 旅行時間推估基本原理圖 ... 13 圖 3.2 系統流程圖 ... 14 圖 3.3 虛擬探針車狀態圖 ... 16 圖 3.4 號誌化道路上下游及路口定義 ... 17 圖 3.5 號誌化道路車輛排隊行為 ... 18 圖 3.6 虛擬探針車與障礙物距離示意圖 ... 19 圖 3.7 號誌化道路車輛排隊符號對應圖 ... 20 圖 3.8 路口號誌時制示意圖 ... 22 圖 3.9 虛擬探針車決策樹 ... 25 圖 3.10 號誌化道路及固定式偵測器佈設幾何圖 ... 28 圖 4.1 模擬路段圖 ... 30 圖 4.2 路網號誌化路口停止線位置圖 ... 31 圖 4.3 模擬路網車輛輸入點圖 ... 34vii
表目錄
表 3.1 虛擬探針車狀態變數整理表 ... 16 表 4.1 號誌化路口名稱表 ... 30 表 4.2 號誌化路口停止線位置表 ... 31 表 4.3 模擬路網號誌化路口時制表 ... 32 表 4.4 模擬路網號誌化路口固定式車輛偵測器設置位置表 ... 33 表 4.5 模擬參數設定表-輸入減輸出之車流量 ... 33 表 4.6 MAPE 預測百分比對照表 ... 36 表 4.7 評估結果比較表 ... 37 表 4.8 評估結果 ... 39 表 4.9 虛擬探針車模擬頻率之評估結果 ... 40 表 4.10 虛擬探針車模擬頻率檢定結果-1 秒與 3 秒 ... 41 表 4.11 虛擬探針車模擬頻率檢定結果表 ... 42 表 4.12 虛擬探針車模擬頻率檢定結果-1 秒與 100 秒 ... 431
一、 緒論
1.1 研究背景與動機 近年來,隨著台灣經濟快速成長,國民生活水準提高,小型車的數量日益增 多,產生許多嚴重的交通擁擠問題。根據中華民國交通部統計資料中,從民國92 年台灣地區機動車輛數18,500,658輛至民國102年8月底已高達22,237,996輛[1], 近十年間的年成長率約為2%,根據交通部運輸研究所[2]於ITS整體發展規劃中提 到,由於機動車輛持有數巨幅增長,導致交通壅塞、交通事故、環境污染、能源 短缺等問題,已成為各國共同面臨的關鍵課題。 為了解決日益擁擠交通方面的課題,其中一個有效的手段就是發展智慧型運 輸 系 統 ( Intelligent Transportation System, ITS ) 中 之 先 進 旅 行 者 資 訊 系 統 (Advanced Traveler Information System, ATIS)子系統[3]。透過ATIS提供相關的 資訊,如路況資訊、預估旅行時間,藉由先進資訊及通訊技術,讓用路人可方便 取得所需之即時交通資訊,使用路人可以透過資訊可變標誌、路況廣播、資訊查 詢站等方式事先規劃合適的路線、使用的運具,以及出發時間,以達到分散車流, 避免擁擠的交通問題,得到紓解交通的目的。 在ATIS所提供的各項功能中,尤以路況資訊為最基礎的項目。對於用路人來 說,若能掌握路況資訊,則能選擇在最適當的時間利用最適當的運具抵達目的地; 對於交通管理人員而言,若能有效了解並掌握交通狀況,能有效運用現有的資源 來進行有效之交通管理策略,如改變號誌時制以疏導壅塞的路段。 目前國內對於旅行時間資料來源之收集主要來自固定式偵測器。一般而言, 資料來源主要來自於固定式偵測器(Vehicle Detector, VD)及移動式探針車(Probe Vehicles),移動式探針車主要是利用設有全球定位系統(Global Positioning System, GPS)裝置的車輛在道路上行駛,以取得所需時間內車輛經過路段之實 際資料,並將其轉換成交通資訊,但因探針車資料數量有限,且較多為服務性車 輛所提供[4],其資料分佈較為不均,故不易具有統計上之代表性;而固定式偵 測器是相隔一段距離在固定點設置偵測器,偵測流量、速率等資料,此方法可蒐 集到較穩定且分佈均勻的資料。 過去國內、外有關使用VD資訊推估旅行時間的相關研究甚多,但大多數以2 探討高、快速道路等無號誌化道路為主,以省道或市區道路等號誌化道路作為研 究對象者較為少見。因此,本研究重點在利用固定式車輛偵測器所偵測的車流量, 發展一套適用於號誌化道路的旅行時間推估方法,主要是以Liu et al. (2009)之方 法為主軸,以所提出之旅行時間推估模組為主要研究基礎,利用台灣的本土資料 來驗證該方法在台灣環境之適用性。 1.2 研究目的與範圍 本論文之研究目的為發展一套適用於號誌化路口的旅行時間推估模式,推估 出兩點間之旅行時間。本研究範圍雖然是為號誌化路口設計之旅行時間推估模式, 若要將本模式應用於無號誌化路口或封閉型道路如高速公路亦可適用。 若應用本方法於無號誌化路口,則只須將無號誌化路口中之綠燈時制設為無 限大,紅燈時制設為零即可適用。故雖然本研究的方法是針對號誌化路口,但同 樣的也適用在無號誌化路口。因此本研究提出的基本上為一套一般性的方法,可 同時適用於有號誌與無號誌化路口。 1.3 研究假設 由於本研究所開發的為號誌化路口推估旅行時間模式,因此對於研究範圍之 每個號誌化路口,假設其號誌時制資料均為可取得。本研究不考慮混和車流下之 旅行時間推估,假設實際路網上的機車存在於小汽車縫隙中,並假設機車停於停 止線前不影響後方小汽車。 1.4 研究流程與架構 根據上述研究內容與範圍,將本研究之研究流程架構整理如圖1.1所示,並 依據各階段流程說明如下:
3 圖 1.1 研究流程圖 (1) 確定研究問題 本階段首先先確定欲研究之目的及動機後清楚的描述及確認研究問題,進行 相關的文獻收集。 (2) 文獻回顧 在確定研究問題後,此階段主要在於蒐集相關之學術論文,以及各相關單位 之報告書等,分析過去研究的優缺點,作為本研究推估模式的基礎,此階段將進 行以下兩部份之文獻回顧。第一為高速公路旅行時間推估相關文獻相關之文獻。 第二為號誌化道路旅行時間推估相關文獻。 (3) VISSIM模擬及測試資料產生 在建立模式前,需先找出多種不同特性的資料來源以本研究作分析,因此在 本階段利用VISSIM模擬軟體構建出路網,並透過模擬系統中的固定式車輛偵測 器來取得各路口的交通量及相關的號控等資料。 確定研究問題 文獻回顧 VISSIM模擬 測試資料產生 發展旅行時間 推估模式 實作應用 模式修正 結論與建議
4 (4) 發展旅行時間推估模式 在取得相關的資料後,本階段主要是透過資料的彙整並結合路段上下游偵測 器的流量,發展可行的車輛旅行時間推估模式。 (5) 實作應用及模式修正 建立完可行的車輛旅行時間推估模式後,此階段分別從兩部分進行。第一為 測試資料產生。第二為測試與分析。首先透過VISSIM產生路段中固定式偵測器 蒐集的資料如流量,以及模擬軟體中計算之車輛旅行時間,接著利用模式計算出 虛擬路網中起訖點間路段之旅行時間,驗證及比較分析兩者旅行時間的差異。 (6) 結論與建議 在最後的階段主要是根據研究過程中所發現之問題與結果進行探討,以期提 出具體之結論與後續研究之建議。
5
二、 文獻回顧
2.1 高速公路旅行時間相關文獻
You et al. (2000) 以無母數迴歸(Non-Parametric Regression)演算法作為核 心運算工具,為一套混合地理資訊系統(GIS)的車輛旅行時間預估模式。該模 式結合GIS技術來預測擁塞路網上路段旅行時間。此混合GIS之旅行時間預估模 式已在以下方面發展及測試,如:儲存、接收,以及顯示交通資料來幫助預測的 流程;建立路網路資料;整合歷史資料庫及道路網路資料。該研究實測於幹道之 (總長5.3 km)旅行時間推估,研究結果顯示百分比平均絕對誤差(Percentage Mean Absolute Error)為6.68~9.88 %;雖然使用此模預估旅行時間可以有準確的 結果,但因須收集較詳細的交通資料如車輛速度、流量、佔有率、車道數等,且 模式複雜,於應用上較有困難。 Suzuki (2000) 採用類神經卡曼濾波演算法來估計動態起訖點(Origin– Destination)之旅行時間及長程高速公路之旅行時間,利用路段固定式偵測器之 交通總流量、平均點速率,以及下匝道之車輛數來預測起訖點之旅行時間與車流 量。卡曼濾波器法包含兩個方程式,狀態方程式及測量方程式,狀態方程式及測 量方程式是用以考量預估計旅行時間前交通狀況之影響。接著以卡曼濾波器整合 類神經網路,運算過程採用矩陣計算,並配合類神經網路模式來得出其中的參數 數據值,以便於流量與旅行時間之預測,研究結果顯示此模式能有效估計動態之 起訖點旅行時間和流量,無論於自由車流狀態下或是擁擠車流狀態下仍然能夠協 助改善其預測之精準度。 Zhang et al. (2003) 提出一個線性模式用以預測高速公路之旅行時間,認為路 段上下游交通量所存在線性關係,其線性模式之係數隨著出發時間之函數而有不 同。利用找出目前之旅行時間與未來的旅行時間中存在的線性關係,即可藉由此 線性關係建立預測模式,並利用目前高速公路的旅行時間來預測未來的旅行時間。 該研究實測於兩地的固定式偵測器數據中,一為路段I-880,二為洛杉磯加州的 12分區。在第一個實測的資料數據中,雖然範圍相對較小,但其預測誤差為5% 至10%,而在第二個實測的資料數據中,預測誤差為8%至13%。 Clark (2003) 提出了一種直觀的匹配模式技術法做交通路況之預測,為一非
6 參數多變量迴歸。除了利用歷史的流量外,此模式利用K-最近鄰居法(k Nearest Neighbor)法預測即時的流量及佔有率。該研究實測於倫敦高速公路上,首先進 行個別分析,再進行兩兩交叉分析,研究結果發現當同時利用流量、佔有率和速 率此三項資訊進行分析時,所得到的預測值相對於使用單一資訊而言,誤差有下 降的現象,所以越多資訊進行分析可以得到越準確的預測結果。 Lin et al. (2004) 發展以模擬為基礎之旅行時間預估模式,實測範圍為美國馬 里蘭東海岸;路網包含高速公路和號誌化路口幹道,並使用模擬軟體CORSIM 模 擬路網之旅行時間,考慮車輛到達路口時遭遇延滯之機率,以馬可夫鏈計算車輛 到達路口延滯的機率值,將機率值乘以Webster 延滯公式計算出的期望延滯時間 而求得實際延滯時間,最後將自由流旅行時間與實際延滯時間相加即可獲得預測 的市區道路路段旅行時間預測之研究。所開發的旅行時間模式主要包括三大模組, 分別為:支援模組(supporting module)、功能模組(functional module)以及輸 出模組(output module);供應模組主要為從偵測器獲得資料,如速度、流量、 密度等並校估模擬參數;功能模組主要用來過濾車流組成之不合理資料、處理遺 漏值,以提供預估旅行時間;輸出模組主要回報錯誤及號誌連鎖給資訊中心並顯 示預估之旅行時間。該研究以模擬軟體輸出的延滯值驗證琦發展模式的實際延滯 時間,發現模式計算的實際延滯值均小於模擬情境之延滯值。研究結果進行模擬 與推估流量之比較以及模擬與調查旅行時間之比較,相較之下該研究皆顯示出良 好的結果。
J.W.C. van Lint et al. (2005) 認為精確旅行時間預測模型之重要因素為輸入 資料的遺失或損壞,並指出預測旅行時間應瞭解路段中是否有產生壅塞的狀況, 因為受到路段下游車速變慢的影響,會有衝擊波向路段上游產生之情形;因此為 了提升旅行時間預測之準確性,該文獻主要是發展一種不同的類神經網路模式, 提出State-space Neural Network(SSNN)之概念發展路徑旅行時間預測模式作為 前置處理的程序,來校估輸入之參數,如速度、流量等。此研究進一步利用卡曼 濾波演算法(Kalman Filtering),更新推估模式中所需之權重,從估計的旅行時 間結果可顯示卡門濾波演算法在道路擁擠時段,會有明顯之計算延滯之誤差。研 究結果利用兩組資料集作分析,從估計的旅行時間數據來看,結果顯示SSNN模 式在線上推估績效(MRE:8.9%)並未比離線推估(MRE:1.6%)來得良好; 另外從實際旅行時間數據來看,SSNN 模式在線上推估績效(MRE:17.7%)依 舊並未比離線推估(MRE:4.8%)來得良好,並發現SSNN之隱藏層輸出值的確 可表示各路段交通狀態,且可依此除去不必要的權重變數。
7
Lin et al. (2008) 使用一連串GPS車輛所傳回的起訖點資料來估計道路上的 速度,透過旅次速度指派法(Trip Speed Assignment Technique)期望能利用較小 樣本的資料來產生路網的平均速度。該研究於美國的州際公路派出27,417輛卡車 行駛,收集為期6天的資料共450萬筆觀測值,每筆資料包含卡車辨識碼、經緯度 及時間。假設傳回之資料可計算卡車實際路徑,且經由回傳之資料能計算出卡車 之速度。該研究透過將平均速度分10等,並將回傳的時間分為5等,因此能把每 筆起訖點資料指派到50種等級中的一種,最後取出各路段中第25百分位之平均速 度作為該路段速度。研究結果顯示旅次速度指派法的確可以用較少的資料量產生 速度,但相較於一般固定式偵測器每5分鐘或15分鐘一筆資料,此方法是較無法 相比的,故該研究希望未來的研究中能更適當的探討時間分類的層級。
Fei et al. (2011) 透過貝氏推理(Bayesian Inference)為基礎之動態線性模型 (Dynamic Linear Model, DLM)法來預測短期高速公路旅行時間,該研究以歷史 旅行時間資料的中位數代表規則旅行時間(Regular),將所預測之高速公路旅行 時間細分為規則旅行時間、規則旅行時間差異,以及模型演化之誤差;其中,貝 氏預測法是一種學習的方法,利用先驗的旅行時間與即時的交通資訊去預測的後 來的旅行時間分配,並依此後來的旅行時間分配產生旅行時間預測區間。此方法 融入適應性框架以避免不可預測之事件如:事故、惡劣的天氣等,使其能自動學 習和調整系統。該研究實測於維吉尼亞州I-66路段,實驗結果顯示該方法可以提 供準確且可靠的旅行時間預測。 2.2 號誌化道路旅行時間相關文獻
Xie et al. (2001) 使用免校準的模式(Calibration-Free Model)估計路段中移 動車輛之平均速度,模式中為了讓各個路線之探針車旅行時間能與實際調查的數 據相近,因此納入兩方面之參數,包涵固定式偵測器之參數及號誌時制之參數。 由於直接從固定式偵測器取得資料,故可以馬上取得使用不須校準。該研究將模 式直接應用在新加坡主要的號誌幹道上作實測,並利用INTEGRATION Version 2.0以旅次為基礎的軟體作模擬,最後將此模式的結果與其他三種需要校準之模 式作比較。該研究結果顯示,在兩組數據測試結果中,顯示四種模式均能提供準 確的速度預測,雖然此研究方法R2約為76%,並沒有明顯優於另外三種模式,但 相對於其他模式,此模式仍然具有免校準的優勢。
8
路感應線圈偵測器(Inductive Loop Detector, ILD)來測量城市路段之旅行時間 (Urban Link Travel Time, ULTT)。其模式包含以下四部份,決定模式中的特徵 向量、利用加權法減少k-NN 模式的誤差、設定距離量度(Distance Metric),以 及判斷類似樣本的數量。該研究實測於倫敦並探討此模式對設計參數變化的敏感 性。雖然該研究結果發現k-NN模式對於設定距離量度並沒有顯著的敏感,但必 須慎選局部估計方法(Local Estimation Method , LEM)及k值;而優化的k-NN模 式能提供更準確的估計旅行時間。研究結果針對不同類似的樣本數進行比較,挑 選在平均絕對誤差率(MAPE)及均方根誤差(RMSE)均最小的最佳的樣本數, 發現當歷史資料庫在15,000 筆下,選擇400筆接近的樣本進行預測可以得到最小 的誤差。 Li et al. (2006) 提出旅行時間的變化資料能有效地幫助運輸資訊之呈現,認 為此資料為重要的影響變數且能準確地透過此資料提升旅行時間之預估。大部分 旅行時間分於車流量之調查及調查範圍之大小,此研究實測於澳大利亞墨爾本, 透過蒐集得到的AVI資料推估未來之旅行時間,由於旅行時間中之變異關係及其 相互影響因素,故該研究利用多元迴歸之方法對蒐集的資料進行量化其旅行時間 變異之關係。將研究資料分為兩群組,分別為上午晨峰時段及下午晚峰時段,兩 組資料具有明顯的變異,其中,有25%之下午晚峰旅行時間與車流量有密切之關 係。 Liu et al. (2009) 透過虛擬探針車模擬法推估號誌化路口之旅行時間,並藉由 Minnesota大學所開發的即時幹道蒐集及歸檔系統從現有的固定式偵測器中蒐集 事件基礎(event-based)之交通資料及路口號誌時制資料,使虛擬探針車透過該 研究發展的依時性幹道旅行時間預測方法,用以推估旅行時間。在模式中,虛擬 探針車會針對目前所遇到的交通狀態作加速、減速或等速的決定,經由一連串的 決策直到虛擬探針車抵達目的地為止。由於知道虛擬探針車的速度,故可以藉此 推估出起訖點之旅行時間。該研究於美國明尼蘇達州最大的城市France Avenue in Minneapolis, MN最擁擠的11個號誌路口走廊作實測,研究結果將其預估之旅行時 間與實測作比較,顯示五筆數據中,有高達四筆數據之誤差值小於3.5%,其均方 根誤差(Root Mean Squared Percent Error, RMSP)僅為0.0325,顯示出此模式精 準的推估能力。
Qiang et al. (2012) 提出由於現有的探針車數量不足,故尚無法適時的反應交 通狀況,因此該研究提出一個旅次配對的想法,認為探針車數據的筆數是了解城
9
市道路的交通狀況變化(Time-of-day variability)的重要因素。該研究將此構想 於日本名古屋中五個號誌化路口作實測,並蒐集五路口的號誌時制數據,獲得多 筆探針車的歷史數據,透過三步驟從區分旅次(Drawing Taxi Trips)、配對位置 (Map Matching),和計算旅行時間(Calculate Link Travel Time)來分析尖峰與 離峰的交通路況。該研究認為空間平均速度(Space mean speed)將會使交通狀 況均值,故需從探針車資料的比數分離出尖離峰,才做路況的預估。研究結果指 出在尖峰時段,平均旅行時間主要受下游路口的排隊長度所影響,在下游交叉口 隊列長度越長,平均旅行時間越長,此結果可用於反映交通狀況的可變性,反映 出此時交通流量是受限於下游之排隊車輛故處於飽和條件。 Zheng et al. (2013) 該研究認為號誌化道路中的供給、需求、號誌,以及隨機 抵達路口的車輛皆會導致旅行時間難以預測,故使用探針車蒐集資訊,再利用三 層類神經網路法(Artificial Neural Network)包括輸入層(Input Layer)、隱藏層 (Hidden Layer),以及輸出層(Output Layer)估計道路旅行時間。該研究將此 方法透過Vissim模擬軟體實測於荷蘭代爾夫特城市道路中,分析一般需求、增加 20%需求、增加50%需求,以及增加100%需求四種情境,結果顯示以ANN法估 計的旅行時間有高達R2為96%之準確率且平均MAPE低於6%。 2.3 小結 一般而言,旅行時間推估之相關研究模式大致上可分為以下五種方法:迴歸 分析法、k-NN法、模擬法、類神經網路法,以及時間序列法。 其中,迴歸分析法及時間序列法相關之模式中,由於其根據不同的特性建立 不同的模型,故需要再利用校估參數的方式進行修正預測,然而這些參數會隨著 不同時空環境而有所改變,因此一旦外在環境改變後,整個模式就需要重新校估 參數,以維持其準確率。 類神經網路法為模仿人類神經網路所建構的一種處理系統。在類神經網路的 架構中,透過蒐集各式各樣的交通資訊,藉由函數轉換做學習訓練的動作,可依 照資料來源、輸入變數間的組合關係對權重進行調整與更新,以達到預估旅行時 間的目標。然而類神經網路法在實際操作上,需要定期蒐集資料,遇有重大交通 設施變化的時候,無法馬上進行預測,必須先重新蒐集一段時間的資料,蒐集完 足夠的資料,學習完畢後才能進行預測,因此在資料蒐集期間的空窗期,該模式
10 預測的精準度相對較低甚至無法預測。 k-NN 法主要是由於處理龐大資料上較不易,因此將歷史資料庫中的資料作 分群的動作,故若能將現況資料與分群後的歷史資料作比對,則能找出k組與現 況資料最相近的資料,最後再利用此k組歷史資料的特性推估未來資料。然而若 要有準確的預估必須先將歷史資料做分群,或是根據歷史資料分析出明顯的特徵。 在進行現況資料與歷史資料比對時,又須判定兩者相近的程度,部分研究會加上 權重值提升比對資料的可靠度。如何選擇特徵以及在複雜度高的空間上校估這些 參數值是此方法需面臨的問題,尤其外在環境改變後,資料庫的更新更為複雜。 綜合以上各種方法都有其優缺點,迴歸分析法及時間序列法需要因時因地的 繁瑣的校估參數、類神經網路法則可能在蒐集資料時產生一段空窗期無法使用、 k-NN法在資料庫上的更新較複雜,這些方法在使用上都有討論的空間。從文獻 中可以發現模擬法是一種概念簡單且不失精準度的方法,利用當時的交通狀況及 車流模式,直接且直觀的模擬當下的交通狀況,以推估旅行時間。過去國內、外 有關旅行時間推估的相關研究甚多,在國內有關此議題的研究,大多以探討高、 快速道路為主,以市區號誌化道路作為研究對象者相當少見。因此本研究主要以 Liu et al.(2009)之旅行時間推估方法作為主軸進一步修改其方法,使其方法可以 適用於台灣現有的固定式偵測器資料中,希望藉由模擬實驗來建構一個可應用於 號誌化道路上旅行時間推估模式。
11
三、 研究方法
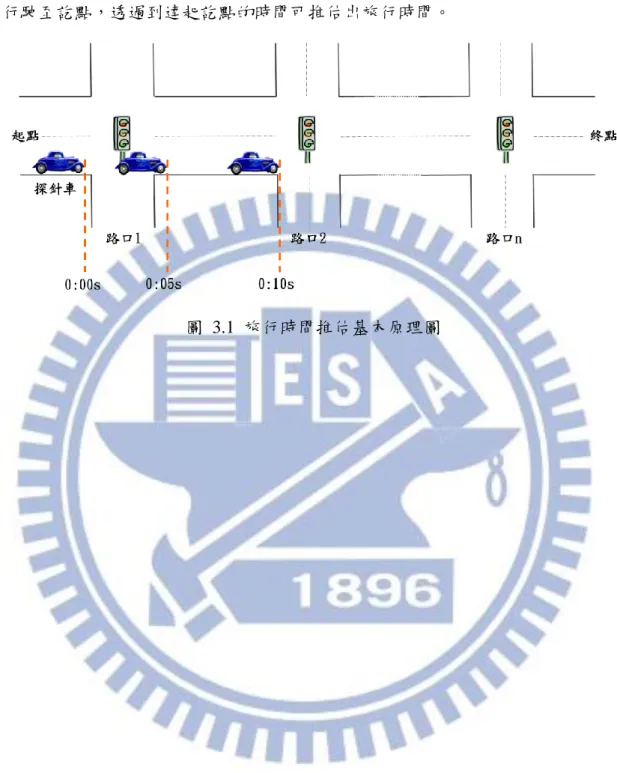
本節首先針對Liu et al. (2009)研究中提出的方法與本研究改良的地方做出說 明,再對推估旅行時間之基本原理做介紹,接著說明本研究旅行時間之推估流程, 其次針對所提出之推估方法介紹所需的資料及來源並說明虛擬探針車之狀態與 行為。接著針對虛擬探針車決策情境做介紹,進而詳述模擬探針車法,並對研究 所需交通資料定義與車輛偵測器資料進行說明,最後推估計算旅行時間。 3.1 Liu et al. (2009)研究與本研究異同 本研究提出之旅行時間推估模式,主要是以Liu et al. (2009)之方法為基礎, 以其所提出之旅行時間推估模組為主要研究基礎,利用台灣的本土資料來驗證該 方法在台灣環境之適用性。因此本研究透過Liu et al. (2009)在相同的假設下(偵 測器佈設健全),可取得相同的資料形態,並在不同的環境下推估旅行時間,本 研究與Liu et al. (2009)的異同處如表3.1所示。 在該論文提出的方法中,所需要的資料來源為流量資料,在Liu et al. (2009) 論文中,其流量資料是直接透過美國明尼蘇達大學開發的即時幹道數據收集歸檔 系統蒐集即時資料取得。但本研究由於考量到台灣目前雖然能偵測出訊號的改變 已累計出流量,但並無類似及時讀取訊號改變的數據收集系統,僅有固定式偵測 器資料定期回傳,故本研究使用其他計算流量之方法來計算每個時間點之流量, 將每分鐘偵測器回傳之流量資料換算為每一秒鐘的流量,再依據研究所需的時間 間隔計算流量即可知道在某段時間內通過之車輛數。 Liu et al. (2009)研究中提出停止線前的排隊車輛長度為推估旅行時間之重點, 該研究過即時幹道蒐集及歸檔系統可以直接判斷每個時間有多少車輛停在路口 前等候。而本研究在計算排隊車輛長度之方法為將偵測器蒐集到的流量進行切割, 嘗試利用VD回傳的流量推估出每個時間點虛擬探針車前面排隊的車輛數,並計 算出探針車前方排隊車輛長度。 為了符合資料庫龐大及資料差異大的特性,本研究主要利用探針車模擬法以 及Liu et al. (2009)之推估方法,將蒐集到的交通量資料依循虛擬探針車決策樹做 決定。並針對Liu et al. (2009)提出之決策樹進行拓展,發展更完全的虛擬探針車 決策樹,此部份在後續探針車決策行為之章節會再做詳述。12 表 3.1 本研究與 Liu et al. (2009)異同表 Liu et al (2009) 本研究 資料來源 美國明尼蘇達大學開發 的即時幹道數據收集歸 檔系統 固定式偵測器資料 (每一分鐘一筆流量) 研究方法 與內容 利用即時歸檔系統計算 等候車輛長度 嘗試利用 VD 所回傳之流 量計算等候車輛長度 虛擬探針車決策樹 - 改良決策樹 適用情況討論 - 有 模擬探針車頻率 - 有 參考路網 實際 實際 3.2 旅行時間推估方法基本原理 本研究之推估方法是採用模擬的方式,從欲推估的路段起點派出一輛虛擬探 針車,模擬此輛虛擬探針車在道路上實際行走的過程,觀察此輛虛擬探針車是否 會受到號誌之影響或前方停等車輛之影響,並使此輛虛擬探針車針對前方不同狀 況做出加速、減速,以及速度不變的決策,透過這些決策行為實際計算虛擬探針 車從起點到訖點所需花費的時間。 本研究推估旅行時間之基本原理如圖3.1所示,圖中的起點及訖點分別為虛 擬探針車的旅次起點及訖點,虛擬探針車沿著路口1依序通過路口2直到通過路口 n抵達旅次訖點。在每個特定的時間,從起點派遣一輛探測車到訖點,並假設整 趟旅程可分為許多個小時間間隔,圖3.1以每5秒做為固定之時間間隔,虛擬探針 車於0:00從起點出發,於每個時間間隔上,本方法需要取得虛擬探針車之位置、 虛擬探針車之速度、前一路口等候車輛長度,以及前一路口之號誌狀態,虛擬探 針車利用這些資料來做出相關之行為決策,如加速、減速。虛擬探針車在做出加 減速的決定後,就可以計算出下一個時間點虛擬探針車所在之位置及速度,如圖 3.1中虛擬探針車每5秒判斷後向前行駛。本方法重複此步驟直到虛擬探針車到達 目的地為止。 本研究方法應用於欲推估旅行時間的時間點前,如今天欲推估八點三十分從 A點行駛至B點所需要的旅行時間,則必須將此方法應用於前十分鐘或前十五分 鐘,如八點十五分或八點二十分。而以下的分析方法則探討如何在這前十分鐘或
13
前十五分鐘有效的推估出旅行時間。首先每1秒鐘都派出一輛虛擬探針車從起點 行駛至訖點,透過到達起訖點的時間可推估出旅行時間。
14 否 是 設定起始值 計算等候車輛長度 決定車輛行為 移動 是否抵達訖點 計算虛擬探針車旅行時間 3.3 旅行時間推估流程 針對旅行時間推估方法,本研究的系統流程圖如圖3.2所示,說明如下。 圖 3.2 系統流程圖 (1) 設定起始值 根據欲推估的路段起訖點,給定虛擬探針車一個起始點,由於虛擬探針車於 路段上會做出加減速的決策,故一開始應透過隨機亂數給定虛擬探針車一個起始 速度,虛擬探針車的起始速度依均勻機率分配出現之原則產生一個介於[0 km/hr, 50 km/hr]間之亂數,起始速度需高於0 km/hr並低於與該路段規定速限50 km/hr。 (2) 計算等候車輛長度 根據虛擬探針車前方路口的號誌狀態及前一路口流量資料,計算出前一路口 最後一輛停等車輛所在位置,亦即停等車輛長度。
15 (3) 決定車輛行為 根據前一路口號誌狀態及前方最後一輛車的位置及狀態,決定虛擬探針車在 當下需做出的決策行為,如加減速等。 (4) 移動 虛擬探針車根據各種不同交通狀況依據上步驟做出決策,並將車輛移動至下 個時間點(如5秒後)所在之位置並計算其速度。 (5) 是否抵達訖點 判斷虛擬探針車是否抵達訖點,若尚未抵達訖點,則虛擬探針車重複前述步 驟繼續往前行駛,直至抵達訖點為止。 (6) 計算虛擬探針車旅行時間 每一輛虛擬探針車抵達訖點後,則能計算出虛擬探針車出發與到達的時間差 及共派出幾輛虛擬探針車,而所有虛擬探針車之旅行時間的平均則作為路況之旅 行時間。 3.4 資料取得與計算 虛擬探針車的決策仰賴於其所面臨的交通狀態。給定虛擬探針車起點及速度 後,虛擬探針車需根據前一路口的等候車輛數及前一路口號誌方能做出決策。前 一路口的等候車輛數資料可由前一路口偵測器蒐集獲得。如圖3.3所示。虛擬探 針車在時間𝜏時剛離開i-1路口並進入下一個路口i,而虛擬探針車抵達路口時速度 為𝑢𝑝(𝜏),在時間𝜏時虛擬探針車前面排隊之車輛數為𝑛 𝑞 𝑝(𝜏),等候車輛長度為 𝐿𝑝𝑞(𝜏)。 圖3.3中虛擬探針車在時間𝜏時的位置為𝑥𝑝(𝜏),而𝑥 𝑞𝑝(𝜏)代表在時間𝜏時虛擬探 針車前面最後排隊車輛的尾端位置,𝑢𝑞𝑝(𝜏)表示在時間 𝜏時虛擬探針車前面最後排 隊車輛速度,而虛擬探針車即將進入的路口i停止線之位置以𝑋𝑠𝑖表示。由以上這 些相對位置即可利用路口停止線的位置減去前方排隊的車輛長度計算出虛擬探 針車在時間𝜏與前面障礙物的距離𝐿𝑝(𝜏),其距離可能為虛擬探針車與前方排隊車 輛之距離,若前方無排隊車輛也可能為虛擬探針車與路口停止線之距離。 所有需要的資料中,虛擬探針車抵達路口時速度𝑢𝑝(𝜏)、虛擬探針車在時間
16 𝜏時的位置為𝑥𝑝(𝜏),以及虛擬探針車即將進入的路口i停止線位置𝑋 𝑠𝑖為已知;時 間𝜏 時虛擬探針車前面排隊之車輛數𝑛𝑞𝑝(𝜏)、時間𝜏時虛擬探針車前面最後排隊車 輛的尾端位置𝑥𝑞𝑝(𝜏)、時間𝜏時虛擬探針車前面最後排隊車輛速度𝑢𝑞𝑝(𝜏)、等候車 輛長度𝐿𝑝𝑞(𝜏),以及虛擬探針車在時間𝜏與前面障礙物的距離𝐿𝑝(𝜏)則需要透過計 算而得。 圖 3.3 虛擬探針車狀態圖 茲就以上整理虛擬探針車狀態圖中所有使用之變數並說明如表3.1: 表 3.1 虛擬探針車狀態變數整理表 𝑢𝑝(𝜏) 虛擬探針車𝑝於時間𝜏抵達路口的速度。 𝐿𝑝𝑞(𝜏) 在虛擬探針車𝑝前面,於時間𝜏最後排隊車輛𝑞距離停止線的長度。 x𝑝(𝜏) 虛擬探針車𝑝於𝜏時間的位置。 𝑋𝑞𝑝(𝜏) 在虛擬探針車𝑝前面,於時間𝜏時最後排隊車輛𝑞的位置。 𝑋𝑠𝑖 路口𝑖停止線𝑠所在的位置。 𝐿𝑝(𝜏) 虛擬探針車𝑝在時間𝜏與前面障礙物的距離(如前方有排隊車 輛則為與排隊車輛之距離,如前方沒有排隊車輛則為與停止 線之距離)。 𝐿𝑝𝑠(𝜏) 虛擬探針車𝑝在時間𝜏的安全距離。 𝑢𝑞𝑝(𝜏) 於時間𝜏在虛擬探針車𝑝前面排隊車輛𝑞的速度。 𝑛𝑞𝑝(𝜏) 在時間𝜏虛擬探針車𝑝前的排隊車輛𝑞數輛。 首先先定義何謂上下游以及前後路口,如圖3.4所示,虛擬探針車行駛的方 向為由左至右,因此路段的上游定義為虛擬探針車一開始經過的左邊,而路段的 (m)
17 下游則定義為虛擬探針車即將抵達的路段右邊;而虛擬探針車即將通過的路口則 稱為前一路口。 圖 3.4 號誌化道路上下游及路口定義 以下則介紹如何依照步驟計算時間𝜏時虛擬探針車前面排隊之車輛數𝑛𝑞𝑝(𝜏)、 虛擬探針車前等候車輛長度𝐿𝑝𝑞(𝜏)、虛擬探針車在時間𝜏與前面障礙物的距離 𝐿𝑝(𝜏),以及虛擬探針車前面排隊車輛的速度𝑢 𝑞 𝑝(𝜏)。計算完所有資料後,本節會 額外說明虛擬探針車如何判斷前一路口之號誌。 Step1:虛擬探針車前方路口等候車輛數 ( )及長度 ( ) 𝐿𝑝𝑞(𝜏)之算法需透過VD之流量資料進行,計算方式如式(1)。如果虛擬探針車 抵達路口時,路口號誌為綠燈,則需找到該路口上一個週期紅燈開始到紅燈結束 時通過上下游VD之車輛數加上綠燈開始到時間𝜏通過上下游VD之車輛數,由於 固定式偵測器每一分鐘能回傳一筆流量,因此將每一分鐘車流量等分成60份後再 累加成紅燈始亮至紅燈結束的車輛數,並依此概念累加綠燈開始至時間𝜏所通過 的車輛數即能求得排隊車輛數;若虛擬探針車抵達路口時,路口號誌為紅燈,則 則需找到該路口上一個週期綠燈開始到綠燈結束時通過上下游VD之車輛數加上 紅燈開始到時間𝜏進來此路段之車輛數,如圖3.5所示。 圖中的小長方形代表路段中行進的車輛,其中深色的長方形代表研究方法中 派出的虛擬探針車,Tg表示路口綠燈開始時間、Tr表示路口紅燈開始時間、圖中 淺色的曲折線為虛擬探針車前排隊車輛長度𝐿𝑝𝑞(𝜏)。圖3.5說明號誌化道路車輛之 排隊行為,本研究方法只需考慮位於灰色虛擬探針車前的排隊車輛數𝑛𝑞𝑝(𝜏)及虛 擬探針車前排隊車輛長度𝐿𝑝𝑞(𝜏)。
18 圖 3.5 號誌化道路車輛排隊行為 𝑛𝑞𝑝(𝜏) { ( ) ( ) ∑ (𝜏) ∑ (𝜏) 如果 𝜏 為綠燈 ( ) ( ) ∑ (𝜏) 如果 𝜏 為紅燈 (1) 𝑛𝑞𝑝(𝜏):於時間𝜏虛擬探針車𝑝前的排隊車輛之數量。 ( ):從紅燈Tr開始至紅燈結束進來虛擬探針車所在路段的車輛數。 ( ):從紅燈Tr開始至紅燈結束離開虛擬探針車所在路段的車輛數。 ( ):從綠燈Tg開始至綠燈結束進來虛擬探針車所在路段的車輛數。 ( ):從綠燈Tg開始至綠燈結束離開虛擬探針車所在路段的車輛數。 舉例如果𝜏為綠燈,在路口的排隊車輛則為上一個週期紅燈開始時抵達此路 段的車輛加上綠燈至𝜏時進入此路段的車輛,則計算𝑛𝑞𝑝(𝜏)時必須先找出位於𝜏前 的上一個紅燈開始至紅燈結束時進入此路段的車輛數,減去紅燈開始至紅燈結束 時離開此路段的車輛數,加上綠燈開始至𝜏進入減離開的車輛數。 𝐿𝑝𝑞(𝜏) 𝑛𝑞𝑝(𝜏) (2) 𝐿𝑝𝑞(𝜏):在虛擬探針車前面,最後排隊車輛距離停止線的長度。 :排隊時的車間距。 𝑛𝑞𝑝(𝜏):在虛擬探針車前的排隊車輛數。 透過上述式(1)之計算可求出虛擬探針車前一路口排隊之車輛數,以排隊之車 輛數乘上固定車間距即能計算出虛擬探針車前一路口等候車輛之長度,如式(2)
19 所示。 Step2:虛擬探針車於時間 與障礙物的距離 ( ) 虛擬探針車於時間𝜏與障礙物的距離為路口停止線位置減去虛擬探針車位置 再減去前面排隊車輛之長度如式(3),概念圖如圖3.6所示。 𝐿𝑝(𝜏) 𝑋 𝑠𝑖 𝑥𝑝(𝜏) 𝐿𝑝𝑞(𝜏) (3) 圖 3.6 虛擬探針車與障礙物距離示意圖 Step3:計算虛擬探針車前面排隊車輛的速度 ( ) 計算虛擬探針車前方最後一輛排隊車輛的速度首先必須知道虛擬探針車於 時間𝜏的號誌週期、綠燈始亮的時間 Tg、停止線後第一輛排隊車輛開始移動的時 間 T1、虛擬探針車前方最後一輛排隊車輛開始移動的時間 T2、虛擬探針車前方 最後一輛排隊車輛通過停止線的時間 T3,以及虛擬探針車前方最後一輛排隊車 輛加速直到渴望速度的時間 T4,其計算方式如式(4)、式(5)、式(6),以及式(7), 相對的位置如圖3.7所示:
20 圖 3.7 號誌化道路車輛排隊符號對應圖 1 (4) 1:停止線後第一輛排隊車輛開始移動的時間。 :表示前一路口綠燈開始時間。 :第一輛排隊車輛駕駛人反應時間,一秒。 2 1 𝑠(𝑛𝑞𝑝(𝜏) ) (5) 2:虛擬探針車前方最後一輛排隊車輛開始移動的時間。 𝑠:兩兩排隊車輛間啟動時間差,一秒。 𝑛𝑞𝑝(𝜏):在虛擬探針車前的排隊車輛數。 由於在 Tr至 T2間,虛擬探針車前方的排隊車輛會漸漸增加,直到 T2時,前 方排隊車輛才會減少,故若測量的時間𝜏介於 Tr及 T2間,則可透過式(1)求出虛擬 探針車前方的排隊車輛數𝑛𝑞𝑝(𝜏);而若測量的時間𝜏不在此範圍間,則虛擬探針車 前方的排隊車輛數則以 T2取代𝜏求得在 T2時停止線後排隊的輛數𝑛𝑞𝑝( 2)。 虛擬探針車前方最後一輛排隊車輛加速直到渴望速度的時間 T4會影響虛擬 探針車前方最後一輛排隊車輛通過停止線的時間 T3,如果虛擬探針車前一輛排 隊車子速度尚未到渴望速度就通過停止線,則代表 ∗ 𝑛𝑞𝑝( 2) ≤ 𝑢𝑓2⁄2𝛾𝑎,因此 𝐿𝑝𝑞(𝜏)、𝑢𝑞𝑝(𝜏)的算法分別如式(8)及式(9): 4 2 (6)
21 3 2 √2 ∗ ( ) (7) 4:虛擬探針車前方最後一輛排隊車輛加速直到渴望速度的時間。 𝑢𝑓:渴望速度。 3:虛擬探針車前方最後一輛排隊車輛通過停止線的時間。 𝛾𝑎:車輛加速度。 考慮虛擬探針車前方排隊車輛的行為後,虛擬探針車前面最後排隊車輛距離 停止線的長度𝐿𝑝𝑞(𝜏)則能根據𝜏的不同而將式(2)擴展成式(8),當𝜏介於 Tr及 T2間, 可以由圖3.7發現,虛擬探針車前方的排隊車輛數增加,因此前方排隊車輛長度 會增加至最高點,直到 T2至 T3間,前方的排隊車輛才會陸續消散,因此排隊長 度漸減,直到 T3虛擬探針車前方最後一輛排隊車輛通過停止線,此時虛擬探針 車前方已無排隊車輛。 𝐿𝑝𝑞(𝜏) { 𝑛𝑞𝑝(𝜏) ≤ 𝜏 ≤ 2 𝑛𝑞𝑝( 2) 12𝛾𝑎(𝜏 2)2 2 ≤ 𝜏 ≤ 3 3 𝜏 (8) 根據虛擬探針車前面最後排隊車輛距離停止線的長度𝐿𝑝𝑞(𝜏)可求出虛擬探針 車前方排隊車輛的速度𝑢𝑞𝑝(𝜏),計算方式如式(9)。 𝑢𝑞𝑝(𝜏) {𝛾 ≤ 𝜏 ≤ 2 𝑎(𝜏 2) 2 𝜏 ≤ 3 (9) 如果虛擬探針車前一輛排隊車子速度已達到渴望速度就通過停止線,則代表 ∗ 𝑛𝑞𝑝( 2) > 𝑢𝑓2⁄2𝛾𝑎,因此 T3的算法如式(10): 3 2 2 ∗ ( ) (10) 當虛擬探針車前方最後一輛排隊的車輛需要先加速達到渴望速度才能通過 停止線,虛擬探針車前面最後排隊車輛距離停止線的長度𝐿𝑝𝑞(𝜏)則會因此細分成 更多狀態,此時的𝐿𝑝𝑞(𝜏)計算方式如式(11)。 𝐿𝑝𝑞(𝜏) { 𝑛𝑞𝑝(𝜏) ≤ 𝜏 ≤ 2 𝑛𝑞𝑝( 2) 12𝛾𝑎(𝜏 2)2 2 ≤ 𝜏 ≤ 4 𝑛𝑞𝑝( 2) 12𝛾𝑎(𝜏 2)2 𝑢𝑓(𝜏 2) 4 𝜏 ≤ 3 3 𝜏 (11)
22 此時虛擬探針車前方排隊車輛速度𝑢𝑞𝑝(𝜏)的計算方式則如式(12)所示: 𝑢𝑞𝑝(𝜏) { ≤ 𝜏 ≤ 2 𝛾𝑎(𝜏 2) 2 𝜏 ≤ 4 𝑢𝑓 4 𝜏 ≤ 3 (12) Step4:判斷虛擬探針車於時間 時前一路口號誌 計算出虛擬探針車在時間𝜏 與障礙物的距離𝐿𝑝(𝜏)及虛擬探針車前面排隊車 輛的速度𝑢𝑞𝑝(𝜏)後,虛擬探針車需判斷前一路口的號誌狀態,才能做出加速減速 等決策行為,因此根據虛擬探針車之研究範圍,取得路段上所有號誌化路口的號 誌時制,如圖3.8為虛擬探針車前一路口之號誌時制示意圖。圖中Tg表示前一路 口綠燈開始時間,Ta表示路口黃燈啟動時間,而Tr表示路口紅燈起始時間。 圖 3.8 路口號誌時制示意圖 先將路口綠燈、黃燈,以及紅燈時間長加總得到週期𝐶,並將𝜏 除以𝐶取餘數, 如式子(13)所示: 𝐶 (13) 𝐶:該號誌化路口號誌週期。 :該號誌化路口綠燈時間長。 :該號誌化路口黃燈時間長。 :該號誌化路口紅燈時間長。 透過𝜏除以𝐶取餘數後,利用餘數所在位置即能判斷虛擬探針車前一路口號誌 狀態,如式(14)。
23 { 餘數 𝑎 𝜏 為綠燈 𝑎 餘數 𝜏 為黃燈 餘數 𝐶 𝜏 為紅燈 (14) 3.5 虛擬探針車決策 蒐集完虛擬探針車做決策時所需要的資訊後,本節針對虛擬探針車做出反應 邏輯前所需的虛擬探針車決策前的判斷與計算及相關的決策邏輯分別介紹如 下: 3.5.1 虛擬探針車決策前判斷計算 虛擬探針車之決策準則在於比較可煞停的安全距離以及與前方障礙物的距 離。虛擬探針車之安全距離為虛擬探針車於時間𝜏時能有效從速度𝑢𝑝(𝜏)降至速度 為0所行駛的距離以𝐿𝑝𝑠(𝜏)表示。透過不斷計算安全距離以及與障礙物距離的長度, 並搭配路口號誌時制判斷自身加速、減速,或者速度不變的反應。判斷方式如3.4.2 節反應邏輯所述,本節先就虛擬探針車在做出判斷前所需要的計算,分別介紹如 下: 首先需求出虛擬探針車在時間𝜏的安全距離(無論是在停止線前煞車,或是 減速到𝑢𝑞𝑝(𝜏)),虛擬探針車需要先取得前方的安全距離𝐿𝑝𝑠(𝜏)才能進行之後的決 策,𝐿𝑝𝑠(𝜏)之計算方法如式(15), 𝐿𝑝𝑠(𝜏) { 𝑢𝑝(𝜏) 12𝛾 2 如果 𝐿 𝑞 𝑝(𝜏)= 𝑢𝑝(𝜏) 1 2𝛾 2 𝑢 𝑞 𝑝(𝜏) 如果 𝐿 𝑞 𝑝(𝜏) > 且𝑢𝑝(𝜏) > 𝑢 𝑞𝑝(𝜏) 其他 (15) 𝐿𝑝𝑠(𝜏):虛擬探針車在時間𝜏的安全距離。 𝑢𝑝(𝜏):虛擬探針車抵達路口的速度。 γ :減速度。 𝑢𝑞𝑝(𝜏):在虛擬探針車前面排隊車輛的速度。 當虛擬探針車前方無排隊的車輛,則虛擬探針車的安全距離則為將本身車速 減至零所行走的距離;如果虛擬探針車前方有排隊的車輛,且虛擬探針車本身的 速度高於前方排隊車輛的速度,此種情況意味著虛擬探針車若依照原本的速度繼
24 續行駛必定與前方車輛撞擊,因此在此種狀況下虛擬探針車之安全距離為將本身 速度降至與前方排隊車輛的速度相等所行駛的距離;而其他的狀況下虛擬探針車 依照本身的速度行駛亦不會撞上前方車輛,故安全距離為零。其中 為虛擬探針 車將本身速度減至0或是將本身速度減至與前方排隊車輛速度相同所需之時間。 其中探針車之減速時間 依據前方有無排隊車輛的不同,分別如式(16)及式 (17)所示: ( ) 如果 𝐿𝑝𝑞(𝜏)= (16) ( ) ( ) 如果𝐿𝑝𝑞(𝜏) > (17) 若虛擬探針車前方無排隊車輛,則 為虛擬探針車將本身速度減至0所耗費 的時間;倘若虛擬探針車前方有排隊車輛,則 為虛擬探針車將本身速度減至與 前方排隊車輛之速度相同所需時間。依據不同情況將 帶回式(15),則可得式(18): 𝐿𝑝𝑠(𝜏) { ( ( )) 2 如果 𝐿𝑞 𝑝(𝜏)= ( ( ) ( )) 2 如果 𝐿𝑞 𝑝(𝜏) > 且 𝑢𝑝(𝜏) > 𝑢 𝑞𝑝(𝜏) 其他 (18) 3.5.2 虛擬探針車反應邏輯 虛擬探針車一共有三種決策方式分別為加速、減速,以及速度不變。圖3.9 為虛擬探針車在每個時間間隔做決定之決策樹,虛擬探針車會針對自己所處的環 境狀態下做出相關的選擇,依照圖3.9可將虛擬探針車所遇到的情境分為13種, 虛擬探針車透過層層的決策即能做出決策,以下就不同的情境整理說明敘述。
25 是否有 足夠安全 距離? 路口號誌 A N 排隊車 輛? 最後排隊 車輛速度 D N 路口號誌 渴望速度 A N 速度為零 D N 能否 通過? 渴望速度 A N D A D N 圖 3.9 虛擬探針車決策樹 (1) 在每個時間點,虛擬探針車需先確定自身所在位置。首先判斷虛擬探針車在障 礙物前𝐿𝑝(𝜏)是否有足夠的減速距離 𝐿 𝑠 𝑝(𝜏)。如果有足夠之減速距離(𝐿𝑝(𝜏) > 𝐿𝑝𝑠(𝜏)),則虛擬探針車不需減速,因為此狀況表示虛擬探針車有足夠的距離作 減速,因此在安全的狀況下,虛擬探針車只須檢視本身的速度是否到達渴望速 度𝑢𝑓,如果速度還未達到𝑢𝑓,則虛擬探針車判斷前一路口號誌,若前一路口號 誌為綠燈則加速通過 (如情境1) ;若前一路口號誌為紅燈則虛擬探針車則維持 原本速度行駛(如情境2)。如果虛擬探針車速度已經達到渴望速度,則若虛擬探 針車前一路口號誌為綠燈,則虛擬探針車維持速度不變通過路口(如情境3);若 前一路口號誌已為紅燈,則虛擬探針車須減速(如情境4)。 (2) 如果虛擬探針車距離前面的障礙物𝐿𝑝(𝜏)太近,導致沒有足夠的減速距離𝐿 𝑠 𝑝(𝜏), 意即(𝐿𝑝(𝜏) ≤ 𝐿 𝑠 𝑝(𝜏)),則需先判斷前面的障礙物是路口停止線還是排隊車輛, 此部分可依式(13)計算出虛擬探針車前面最後排隊車輛距離停止線的長度來判 斷是否前方有排隊車輛。如果前方有排隊車輛,則判斷虛擬探針車的速度是否 大於前面最後一輛排隊車輛的速度𝑢𝑞𝑝(𝜏),如果虛擬探針車速度大於前面最後一 輛排隊車輛的速度(𝑢𝑝(𝜏) > 𝑢 𝑞 𝑝(𝜏)),則虛擬探針車為避免撞上前方車輛,需 > 紅 渴望速度 加速 減速 不變 是 否 是 否 綠 紅 黃 是 否 > 綠 紅 路口號誌 綠 N D 否 是 情境 1 情境 2 情境 3 情境 4 情境 5 情境 6 情境 7 情境 8 情境 9 情境 10 情境 11 情境 12 情境 13
26 要減速至與前方排隊車輛之速度相等(如情境5)。如果虛擬探針車和前方車輛速 度皆為零(𝑢𝑝(𝜏) 𝑢 𝑞𝑝(𝜏)),則兩台車都繼續維持靜止(如情境6)。如果虛擬探 針車前面沒有排隊車輛,意即虛擬探針車前方僅有路口之停止線,則判斷時需 額外檢查前一路口的號誌狀態如下點所述。 (3) 如果虛擬探針車前無排隊車輛,僅有路口之停止線,則若前一路口的號誌狀態 是綠燈,則虛擬探針車只需檢查本身的速度𝑢𝑝(𝜏)是否到達渴望速度𝑢𝑓。如果本 身速度尚未達到渴望速度,則虛擬探針車須加速(如情境7),若虛擬探針車速度 已經達到渴望速度𝑢𝑓,則虛擬探針車維持渴望速度前進(如情境8)。如果前一路 口的號誌狀態為紅燈,虛擬探針車需減速至0停止於停止線上,此時須檢視虛擬 探針車的速度是否為0,如果尚未達到 ,則虛擬探針車就減速(如情境9);若虛 擬探針車速度已經為 ,則虛擬探針車維持速度為0(如情境10)。 (4) 如果前一路口的號誌狀態為黃燈,需計算虛擬探針車在剩餘黃燈時間 (𝜏)內能 行駛的最大距離,以𝐿𝑝(𝜏)表示之。如果虛擬探針車與前方障礙物(路口停止線) 的距離小於虛擬探針車在剩餘黃燈內能行駛的距離(𝐿𝑝(𝜏) 𝐿𝑝(𝜏)),意即代表 虛擬探針車能在剩餘黃燈時間通過停止線。虛擬探針車能利用剩餘的黃燈時間 通過停止線,此時虛擬探針車需判斷本身速度𝑢𝑝(𝜏)是否已達渴望速度 𝑢𝑓,如 果尚未達到渴望速度,則虛擬探針車選擇加速(如情境11);如果虛擬探針車速 度已達到渴望速度,則虛擬探針車維持渴望速度不變(如情境12)。反之,若虛 擬探針車與前方停止線的距離大於虛擬探針車在剩餘黃燈內能行駛的距離 (𝐿𝑝(𝜏) 𝐿𝑝(𝜏)),則代表虛擬探針車無法在剩餘的黃燈時間通過停止線,虛擬 探針車只能減速(如情境13),其中虛擬探針車在剩餘黃燈時間內能行駛的最大 距離𝐿𝑝(𝜏)之算法如式(19)。 𝐿𝑝(𝜏) { 𝑢𝑝(𝜏) (𝜏) 1 2𝛾𝑎 2(𝜏) (𝜏) ≤ 𝑝(𝜏) 𝑢𝑝(𝜏) 𝑝(𝜏) 1 2𝛾𝑎( 𝑝(𝜏)) 2 𝑢𝑓 ( (𝜏) 𝑝(𝜏)) 其他 (19) 𝐿𝑝(𝜏):虛擬探針車在剩餘黃燈時間內能行駛的最大距離。 𝛾𝑎:加速度。 (𝜏):剩餘可通過路口的黃燈時間。 𝑝(𝜏):虛擬探針車加速至𝑢𝑓的時間。 當虛擬探針車加速至渴望速度所花費的時間高於剩餘可通過路口的黃燈時 間時,代表虛擬探針車在通過路口時正處於加速狀態,因此虛擬探針車在剩餘黃 燈時間能行駛的最大距離為原本速度在剩餘黃燈內行駛的距離加上正在加速時
27 所行駛的距離。 若虛擬探針車加速至渴望速度所花費的時間小於剩餘可通過路口的黃燈時 間,意即虛擬探針車能在通過路口前加速至渴望速度後再等速通過路口,故虛擬 探針車在剩餘黃燈時所行駛的距離為原本速度在剩餘黃燈內行駛的距離加上加 速時所行駛的距離再加上以渴望速度等速行駛的距離。 3.6 交通資料定義與車輛偵測器蒐集 本節首先針對本研究所需相關資料進行定義及說明。由於本研究主要目的為 發展一套適用於號誌化路口的旅行時間推估模式,故對於研究範圍之每個號誌化 路口,其號誌時制資料必須可取得,號誌化道路及固定式偵測器佈設幾何圖如圖 3.10所示。號誌化道路上游及停止線兩地須設有固定式車輛偵測器。 為滿足3.4節虛擬探針車決策時所需計算之資料以達旅行時間推估模式之需 求,本研究需事先取得各項交通資料,其定義及所資料取得說明如下: (1) 研究範圍之號誌化路口,編號1…n。由於本研究採用VISSIM建構路網,故 相關的路口號誌皆根據VISSIM中的路網取得[20],並根據虛擬探針車的起點 沿著行車方向逐一為路口編號。 (2) 號誌化路口停止線之位置。停止線相關位置亦根據VISSIM中的路網取得 [20]。 (3) 研究範圍號誌化路口之號誌時制。號誌時制可根據原本號誌化路口所配置的 週期時相取得,此部分必須與VISSIM模擬時所輸入的號誌時制相符。 (4) 車輛偵測器設置及蒐集資料,根據Liu et al. (2009)之建議,故在VISSIM建構
路網時,於各個號誌化路上游50公尺及停止線各設置一座固定式車輛偵測器, 並於一定時間內偵測流量(Volume),所蒐集之資料為通過道路某定點之小 車流量車輛數。
28 圖 3.10 號誌化道路及固定式偵測器佈設幾何圖 3.7 旅行時間推估之計算 依照虛擬探針車所做的計算及決策邏輯,可以決策出在每個時間間隔∆ 是否 要加速、減速,或者速度不變,當虛擬探針車作完決策後,則能求出虛擬探針車 在下一個時間間隔時所在的位置及速度,反覆執行一樣的步驟直到虛擬探針車通 過訖點為止。最後累計所有的時間間隔∆ ,即能推估出旅行時間。
29
四、 數值分析
本研究主要利用虛擬探針車模擬法,將佈設於號誌化道路之偵測器所蒐集到 的流量交通量資料以及號誌控制資料加以分析,再利用探針車模擬的方式進行旅 行時間推估。本研究擬以車流模擬軟體對於一般市區道路之車流行為進行模擬, 並於模擬的市區道路路網相關位置上以VISSIM佈設固定式偵測器。 由於模式之驗證需要有一真值,透過車流模擬軟體來取得固定式偵測器的流 量資料及旅行時間,為文獻上常用之作法。由於實地調查無法針對某些特殊狀況 進行實驗,有時偵測器回傳之流量資料並不完整,或是調查的時間及成本太高, 若採用模擬的方式不僅可以節省成本同時也可以產生各種不同情境之資料做測 試。故本研究將透過車輛模擬軟體測得兩地間之旅行時間當作實際值,來衡量評 估模式之精準度並產生模擬分析所需之資料,期望能有效利用偵測器回傳的資料 推估出準確的路況。 本章首先針對數值分析時所需要的資料進行模擬的路網構建;接著簡單敘述 模擬軟體所能提供之資料;並對模擬資料做詳細的解釋。 4.1 VISSIM 路網構建 本研究透過車輛模擬軟體VISSIM 5.10來構建道路路網,參數的資料來源為 「捷運土城線延伸頂埔段」微觀模擬結果分析[20]所建置之路網資料。調查地點 為新北市土城區中央路三段,由大暖路口起往東至大安路口後路段為模擬路段。 VISSIM於建構路網前所需要的相關資料依序列點如下說明: (1) 號誌化路口 VISSIM建構之路網如圖4.1所示,整體路段為1119.697公尺,圖4.1中的阿拉 伯數字為路口的編號,共有5個號誌化路口,其對應之號誌化路口名稱如表4.1。 模擬的旅次起訖點長度約900公尺,起點位於路段108.5公尺處,而訖點位於路段 1014.5公尺處。30 圖 4.1 模擬路段圖 表 4.1 號誌化路口名稱表 路口編號 路口名稱 1 大暖路口 2 三民路口 3 52 巷 4 科學園區東 5 科學園區西 (2) 號誌化路口停止線位置 由於VISSIM建構路網時需要在停止線及停止線前方50公尺架設固定式偵測 器,故必須依實際路口各路口停止線之位置架設,其中路口停止線位置與該路口 號誌擺放位置相同,如圖4.2號誌化路口停止線位置圖所示,號誌化路口停止線 位置表如表4.2所示。 調查地點:新北市土城區中央路三段 調查方向 旅 次 起 點 旅 次 訖 點 906m 108.5m 1014.5m 1 2 3 4 5
31 圖 4.2 路網號誌化路口停止線位置圖 表 4.2 號誌化路口停止線位置表 路口編號 路口停止線位置 1 235.870 2 422.364 3 579.899 4 773.205 5 821.044 4.2 模擬軟體 本研究使用VISSIM模擬軟體作為資料來源產生之工具。由於VISSIM屬於微 觀模式的車流模擬軟體,可以針對單一車輛的個別行為以及與其他車輛之間的關 係進行分析,可以提供個別車輛的速率、行進方向等參數,同時可紀錄車輛在路 口、路段的軌跡並提供旅行時間。而使用者可以依不同需求輸入路段上各路口號 誌時制,並根據自己的需求佈設固定式偵測器及調整各方向之車流量。 由於本研究是以虛擬探針車透過固定式偵測器回傳的資料進行分析處理,考 慮到本研究內容的特性,需依照研究之需求於停止線上游50公尺架設VD,並以 回傳的資料作為分析對象,故所使用之模擬軟體必須要能針對各個VD進行設定, 旅 次 起 點 旅 次 訖 點 1119.697m 108.5m 1014.5m 路 口 停 止 線 路 口 停 止 線 路 口 停 止 線 路 口 停 止 線 路 口 停 止 線
32 例如:偵測器回傳資料的間隔。同時能夠對於不同道路狀況的參數進行調整,以 便模擬出本研究所需之資料。由於VISSIM所具備的條件與本研究內容需求相符, 故採用VISSIM模擬軟體做為主要的資料來源產生工具。 4.3 模擬所需資料 本研究進行數值分析前,需要整理以下資料: (1) 號誌化路口編號 模擬路網之號誌化路口可直接由VISSIM路網整理得。根據4.1節中所建 構的模擬路網中,依照欲推估旅行時間的起點向欲推估旅行時間的訖點,沿 途找出所經過的路口依照順序編號,如圖4.1所示,依序為編號1, 2, ... ,5,共 有5個號誌化路口。 (2) 號誌化路口時制,包含各路口綠燈、黃燈,以及紅燈秒數 虛擬探針車經過模擬路段時所經過之號誌化路口時制可直接由VISSIM 軟體設定,本研究依據現況輸入對應路口相關之號誌[20]。本研究模擬路網 一開始會有3秒的清道時間,其餘各路口號誌時制如表4.3所示。 表 4.3 模擬路網號誌化路口時制表 路口編號 綠燈秒數 黃燈秒數 紅燈秒數 1 95s 2s 53s 2 100s 2s 48s 3 90s 2s 58s 4 90s 2s 58s 5 105s 2s 43s (3) 號誌化路口固定式車輛偵測器設置位置 於調查路段中,固定式偵測器以設置於號誌化路口之停止線及路口上游 50公尺兩處架設為原則,以便量測進入路段中的車輛數。唯有一路口因路段 長度低於50公尺,故該路口的上游偵測器設置於路段最尾端。模擬路網號誌 化路口固定式車輛偵測器設置位置可於VISSIM模擬時依研究所需而依不同 原則的設置,各VD設置位置如表4.4所示。
33 表 4.4 模擬路網號誌化路口固定式車輛偵測器設置位置表 路口編號 停止線 VD 所在位置 上游 VD 所在位置 1 235.870m 185.870m 2 422.364m 372.364m 3 579.899m 529.899m 4 773.205m 723.205m 5 821.044m 795.827m (4) 號誌化路口固定式車輛偵測器流量 該路網的實際車流比例,經調查計算後為小客車48.2%、機車47.9%、 客運公車3.9%[20],而本研究主要以此路網進行小客車旅行時間之推估;在 模擬軟體中,可藉由透過改變路段的車流量來模擬不同情境下的路況。相關 模擬的車流量資料,可參照表4.5,編號為構建的路網資料中,車輛進出的 位置,共有6個車流量進出點,如圖4.3所示;原始車流量為實際調查的車流 量參數資料,改變車流量則為本研究自行輸入至模擬軟體中的車流量,改變 的方式以原始車流量為基準,並以倍數增加、減半同時改變進入點的車流量 等方式進行調整,共產生3種不同的模擬情境。 表 4.5 模擬參數設定表-輸入減輸出之車流量 車輛進出點 (1) (2) (3) (4) (5) (6) 模擬結果 改變車流量 高流量 1500 225 500 125 200 125 1 原始車流量 中流量 1200 180 400 100 160 100 2 改變車流量 低流量 900 135 300 75 120 75 3 (單位:車輛/小時)
34 圖 4.3 模擬路網車輛輸入點圖 本研究每次模擬時間為10小時,每1分鐘為單位輸出資料,每一種案例 可得到6000筆VD資料,並以相同方式模擬3種不同車流量的資料,故產生3 種不同流量的案例資料。每個情境資料均包含各VD每分鐘所回傳的流量資 料以及該路段上所有小客車的平均旅行時間,並依小客車的平均旅行時間作 為實際資料真值,以便後續作業討論在不同道路情境下的推估結果。 (5) 車輛渴望速度 虛擬探針車進行車輛模擬時,會依據一個最高速限或是駕駛人最渴望的 速度進行行駛。因此本研究對於車輛渴望速度的設定,必須依照模擬軟體在 建構路網時對渴望速度的設定,本研究根據對於一般市區道路規定,設定 VISSIM軟體中車輛渴望速度為50km/hr。 (6) 車輛固定加速度及減速度 因此本研究根據Liu et al. (2009) 所提出的方法,假設駕駛人會依照固定 的加速度及減速度行駛,故本研究同樣假設駕駛人有個固定的加速度及減速 度。設定駕駛人車輛加速度為1.097 m/s2,駕駛人車輛減速度為3.048 m/s2。 (7) 駕駛人感知及反應時間 本研究根據Liu et al. (2009) 在該論文提出的方法中,設定駕駛人對於號 (1) (2) (3) (4) (5) (6) 旅 次 起 點 旅 次 訖 點 車 輛 進 出 點 車 輛 進 出 點 車 輛 進 出 點 車 輛 進 出 點 車 輛 進 出 點 車 輛 進 出 點
35 誌的感知時間為1秒,且車輛與車輛間的反應時間亦為1秒。 4.4 模式驗證與分析 根據VISSIM所計算出路段的旅行時間為每五分鐘輸出一筆數據,而每筆數 據中僅能看出在五分鐘內通過的車輛數及軟體計算出的旅行時間;而本研究所推 估之旅行時間為每一秒鐘能輸出一筆數據,而每筆數據代表一輛虛擬探針車通過 路段時所需的旅行時間。 為了比較本研究推估出的旅行時間與實際旅行時間中的差異,並判斷模式的 適用情境,將本研究所推估出的旅行時間每五分鐘平均成一筆數據與VISSIM所 計算出的旅行時間做比較,其需要進一步利用評估指標來衡量估計值之準確性, 分別敘述如下。 4.4.1 評估指標 在資料分析後的推估結果上,本研究採用文獻上常見的三種預測評估指標作 為評估方式,分別為︰平均絕對值誤差率(Mean Absolute Percentage Error , MAPE)、均方根誤差(Root Mean Square Error, RMSE)與平均絕對誤差(Mean Absolute Error, MAE)作為模式精準度之判斷依據。由於前兩者屬於相對誤差值, 不受單位與數值大小之影響,判斷依據較為客觀;而後者為絕對指標值,可用以 判定估計值與實際值之間的差距程度,屬於較主觀之評估指標。以下個別介紹這 些指標︰
(1) 平均絕對值誤差百分比(Mean Absolute Percentage Error, MAPE)
又稱為平均絕對誤差率,用以作為預測模式優劣之評估指標。主要因為 MAPE 為相對數值,不受測量值與預估值單位及大小之影響,能夠客觀得獲得 估計值與實際值間之差異程度,可應用於本研究中了解推估結果的準確程度,其 計算方式及定義如式(20)所示: 1 ∑ | 1 ( ) ( ) ( ) | (20) 其中,M 為樣本數