97-84-5320
MOTC-IOT-96-IBB008
自動化路況資訊偵測系統
研發與示範(二)
條 碼 距 書 脊 1 公 分
97
自動化路況資訊偵測系統研發與示範
︵
二
︶
交通部運輸研究所
ISBN 978-986-01-4533-5 ISBN 條碼 GPN:1009701342 定價 300 元著者:卓訓榮、吳炳飛、莊晴光、周幼珍、瞿忠正、曾明德;
陳昭榮、古閔宇、高志忠、范崇瑞、楊智壬、劉世程、
梁立偉、洪順煌、劉治君、朱遂強、蕭文淵(影像);
蔣夢儒、王紳、蔡昆宏、吳孟霖、陳昱光、藍健綸、
黃 恆、劉至剛、李日錦、徐嘉駿、傅昱瑄、王之音、
李宜珊、卓學榮(微波)
;
吳玉珍、李霞
自動化路況資訊偵測系統
研發與示範(二)
97-84-5320
MOTC-IOT-96-IBB008
交通部運輸研究所合作研究計畫出版品摘要表
出版品名稱:自動化路況資訊偵測系統研發與示範(二) 國際標準書號(或叢刊號) ISBN 978-986-01-4533-5 (平裝) 政府出版品統一編號 1009701342 運輸研究所出版品編號 97-84-5320 計畫編號 96-IBB008 本所主辦單位:運輸資訊組 主管:吳玉珍 計畫主持人:吳玉珍 研究人員:李霞 聯絡電話:(02)23496886 傳真號碼:(02)25450426 合作研究單位:國立交通大學 計畫主持人:卓訓榮 協同主持人:吳炳飛、莊晴光、周幼珍 、瞿忠正、曾明德 地址:新竹市大學路1001 號 聯絡電話:(03)5710657 研究期間 自96 年 3 月 至96 年 12 月 關鍵詞:影像式車輛偵測器、微波式車輛偵測器、交通參數 摘要: 車輛偵測系統為推動智慧型運輸系統重要的基礎設備,國內目前所使用之車輛偵測 器多直接引進國外產品,不但價格昂貴,其後續的維護及相關技術受限於國外,同時並 不完全適用於國內的路況特性。面臨民眾及交通管理單位對於即時路況資訊的迫切需求 ,94~95年本所與交通大學合作研發完成適用於臺灣交通環境特性並具合理成本之車輛 偵測器雛型,以影像及微波式偵測技術為研發重點,經實測分析證實國內確實具有研發 車輛偵測器的能量。在前期計畫中,持續改善影像、雷達微波之雛形,並進行功能改善 ,將所研發偵測器實際裝設於路側進行不同天候環境下之測試,在車種辨識、車流量及 車速之準確率上皆有所提昇。 在影像偵測器方面,本系統已具日、夜間暨破曉、黃昏時刻,多車道之車種、流量 及車速之辨識能力,並完成與CCTV之整合試作;在微波偵測器方面,本研究研發了國 內第一顆車輛偵測器的CMOS晶片,並且結合了自行研發之雙陣列天線,完成國內第一 個微波偵測器之雛型,本期計畫除了改善硬體單元,亦開發後端相對應之辨識軟體,以 及人性化之操作及維護介面,使所研發之車輛偵測器雛型更適用於不同環境及交通特性 之應用。 本研究期望藉由影像與雷達微波車輛偵測系統的研發,發展國內相關產業的技術, 達到扶植技術研究與落實產品開發的目標,未來經過技術轉移,與國內廠商合作達產品 化階段後,將可投入市場大量生產,進而大幅降低設備成本,減少公部門成本支出。 出版日期 頁數 定價 本 出 版 品 取 得 方 式PUBLICATION ABSTRACTS OF RESEARCH PROJECTS INSTITUTE OF TRANSPORTATION
MINISTRY OF TRANSPORTATION AND COMMUNICATIONS
TITLE: Development and Demonstration of Automatic Traffic Information Detection System (II) ISBN(OR ISSN)
ISBN 978-986-01-4533-5 (pbk.)
GOVERNMENT PUBLICATIONS NUMBER 1009701342
IOT SERIAL NUMBER 97-84-5320
PROJECT NUMBER 96-IBB008 DIVISION: Information Systems Division
DIVISION DIRECTOR: Jennifer Yuh-Jen Wu PRINCIPAL INVESTIGATOR: Jennifer Yuh-Jen Wu PROJECT STAFF: Hsia Lee
PHONE:(02)23496886 FAX:(02)25450426
PROJECT PERIOD FROM March 2007 TO December 2007
RESEARCH AGENCY: National Chiao Tung University PRINCIPAL INVESTIGATOR: Hsun-Jung Cho
ASSOCIATE INVESTIGATOR: Bing-Fei Wu, Ching-Kuang C. Tzuang, Yow-Jen Jou, Chung-Cheng Chiu, Ming-Te Tseng ADDRESS: 1001Ta Hsueh Road, Hsinchu, Taiwan, R.O.C.
PHONE: (03) 571-0657
KEY WORDS: Vision-based Vehicle detector, Microwave Radar Vehicle Detector, Traffic Parameter
ABSTRACT:
Vehicle detectors are basic infrastructures for ITS development. In Taiwan, most traditional vehicle detectors are foreign products. Thus, implementation costs are very expensive, and maintenance and related techniques are dominated by foreign agencies. In addition, these detectors cannot perform very well under the sophisticated traffic environment in Taiwan, such as mixed traffic flow. In order to expand the sources of traffic information, IOT and NCTU teams have cooperated on the feasibility study of vehicle detector prototype development, in 2005. The team developed two kinds of vehicle detector prototypes, vision-based and microwave-based; their performances were successfully verified. In 2006 and 2007, we continue to improve detection technique and enhance accuracy under different-condition field tests.
For the vision-based vehicle detector, the system can successfully identify vehicles in multiple lanes during day or night. The system was also integrated with CCTV feasibly. As for the microwave-based vehicle detector, we developed the CMOS IC vehicle detector (which is first developed in Taiwan) and the antennas and composed the embryo detection system. The prototype performed very well under primary testing. In 2007, we improved the hardware of the microwave-based vehicle detector and its identifying software with self-designed user interface.
We hope the outcomes of the study could drive and cooperate with the domestic manufacturers to produce low-cost and high-accuracy vehicle detectors through technology transfer in the future. Furthermore, vehicle detectors could be implemented more comprehensively and provide more complete traffic information.
DATE OF PUBLICATION June 2008 NUMBER OF PAGES 424 PRICE 300 CLASSIFICATION □RESTRICTED □CONFIDENTIAL □SECRET □TOP SECRET ■UNCLASSIFIED
前言
車輛偵測器為道路交通資料收集系統重要一環,所有交通管理策略必 須依賴所蒐集之正確資訊,方能制定、分析與執行相關策略,並可由車輛 偵測器即時取得現場交通資訊,即時反應到資訊可變標誌、全球資訊網伺 服網站,藉由資訊可變標誌、網頁將交通資訊提供給用路人,作為用路人 選擇行駛路徑決策之參考。 國內目前除了高速公路及省道、都市部分重要瓶頸路段佈設車輛偵測 器,以產生自動化之路況資訊外,其它路段則須由警廣與全國路況資訊中 心取得事件資訊,使得用路者往往無法預知起始地與目的地間之道路狀 況,因而錯失其選擇最佳路徑的機會,如此不但影響用路者行車品質及交 通管理者的決策精準外,更影響整體道路的使用效率,進而增加社會成本。 長久以來,國內使用的車輛偵測器多採用國外產品,且價格及維護受 限於國外廠商,同時國外產品對於國內複雜的交通環境(如機車)在偵測 上更有所限制,而民眾及交通管理單位對於即時路況資訊的需求日益迫 切。為了落實擴充路況資訊之構想,94 年起本所陸續與產官學研進行偵測 器的研發,第1 年與交通大學合作探討研發適用於臺灣交通環境特性並具 合理成本車輛偵測器之可行性,以影像及微波式偵測技術為研發重點,經 初步實測,證實國內確實具有研發車輛偵測器的能力;第2 年進行系統雛 型研發與功能提昇及改善;第3 年則持續進行更多面向的功能擴充、測試 及改善,期望能精簡硬體單元,搭配有效率之自動化學習軟體演算法,以 及人性化之操作及維護介面,使所研發之車輛偵測器雛型更適用於不同環 境及交通特性之應用。 本年度計畫內容延續前期所研發車輛偵測器雛型之成果,分別就影像目 錄
目 錄...目錄-I 圖目錄...目錄-IV 表目錄...目錄-XI 第一章 緒 論... 1-1 1.1 研究背景與目的... 1-1 1.2 與前期計畫關聯性... 1-1 1.3 前期計畫研究成果... 1-2 1.3.1 前期偵測器裝設位置概述... 1-3 1.3.2 前期系統整合介面外觀... 1-4 1.3.3 前期偵測器資料統計結果... 1-8 1.4 本期計畫目標項目... 1-35 1.5 文獻回顧... 1-36 1.6 研究方法概述... 1-38 第二章 系統硬體架構... 2-1 2.1 硬體架構說明... 2-1 2.2 硬體組成... 2-1 2.3 實驗地點架設... 2-143.5 系統介面說明... 3-40 第四章 實測分析... 4-1 4.1 台68 快速公路實測數據 ... 4-1 4.2 臺北市敦化南路實測數據... 4-5 4.3 市區道路異常事件偵測評估分析... 4-12 4.4 系統雛型功能評估... 4-19 4.4.1 偵測器功能分析... 4-19 4.4.2 事件偵測試作... 4-20 第五章 與CCTV 整合試作 ... 5-1 5.1 影像取得... 5-1 5.1.1 雪山隧道... 5-1 5.1.2 八卦山隧道... 5-7 5.1.3 臺北交控中心... 5-9 5.2 CCTV 影像特性分析 ... 5-13 5.2.1 隧道內光線變化影響... 5-14 5.2.2 影像幅數(Frame)分析... 5-17 5.3 事件分類... 5-19 5.4 CCTV 整合系統之關鍵技術說明 ... 5-22 5.4.1 背景擷取... 5-23 5.4.2 車輛切割... 5-28 5.4.3 車輛偵測... 5-32 5.4.4 車輛追蹤... 5-34 5.4.5 車輛壅塞... 5-39 5.4.6 變換車道... 5-39 5.4.7 掉落物事件... 5-41 5.4.8 靜止車輛... 5-43 5.5 影像式車輛辨識系統整合於臺北市CCTV 之試作分析 ... 5-44
5.6 事件偵測實測分析... 5-46 5.7 結語... 5-51 第六章 系統建置及實際運作整體架構... 6-1 6.1 影像式車輛偵測器建置規範建議... 6-1 6.2 與CCTV 整合之建置規範建議 ... 6-2 6.2.1 每秒影像幅率規範... 6-3 6.2.2 架設地點與高度建議... 6-5 6.2.3 隧道內架設建議... 6-5 6.3 影像式車輛偵測器路側端及中心端實際運作架構建議... 6-6 第七章 結論與建議... 7-1 7.1 影像式車輛偵測器雛型系統準確率分析... 7-1 7.2 結論與建議... 7-5 參 考 文 獻... 參-1 附錄1 簡報... A.1-1 附錄2 期中、期末審查會議紀錄暨意見回覆 ... B-1
圖目錄
圖1.3-1 前期(95 年度)影像式偵測器裝設位置圖 ... 1-2 圖1.3.1-1 中華路五段 684 巷路口車道示意圖 ... 1-3 圖1.3.1-2 東西向快速公路台 68 線南寮-竹東段車道示意圖... 1-4 圖1.3.2-1 前期系統整合介面外觀 ... 1-4 圖1.3.2-2 前期系統介面外觀區塊 ... 1-5 圖1.3.2-3 影像監視區 ... 1-5 圖1.3.2-4 車道運動車輛資訊區 ... 1-6 圖1.3.2-5 系統操作區 ... 1-7 圖1.3.2-6 功能鍵觸發對話框 ... 1-7 圖1.3.2-7 合作伙伴標示區 ... 1-8 圖1.3.3.1-1 尖峰時段(0640~0740)中華路五段 95 年度系統與 94 年度系統準 確率比較圖... 1-9 圖1.3.3.1-2 尖峰時段(0740~0840)中華路五段 95 年度系統與 94 年度系統準 確率比較圖... 1-9 圖1.3.3.1-3 尖峰時段(0640~0740)大型車流量準確率比較圖-中華路五段 ... 1-10 圖1.3.3.1-4 尖峰時段(0640~0740)小型車流量準確率比較圖-中華路五段 ... 1-10 圖1.3.3.1-5 尖峰時段(0640~0740)機車流量準確率比較圖-中華路五段 ... 1-11 圖1.3.3.1-6 尖峰時段(0740~0840)大型車流量準確率比較圖-中華路五段 ... 1-11 圖1.3.3.1-7 尖峰時段(0740~0840)小型車流量準確率比較圖-中華路五段 ... 1-12 圖1.3.3.1-8 尖峰時段(0740~0840)機車流量準確率比較圖-中華路五段 ... 1-12 圖1.3.3.1-9 離峰時段(1240~1340)中華路五段 95 年度系統與 94 年度系統準 確率比較圖... 1-13圖1.3.3.1-10 離峰時段(1240~1350)大型車流量準確率比較圖-中華路五段 ... 1-13 圖1.3.3.1-11 離峰時段(1240~1350)小型車流量準確率比較圖-中華路五段 ... 1-14 圖1.3.3.1-12 離峰時段(1240~1350)機車流量準確率比較圖-中華路五段 ... 1-14 圖1.3.3.1-13 尖峰時段(0700~0800)東西向快速道路系統辨識率圖 ... 1-15 圖1.3.3.1-14 尖峰時段(0700~0800) 大型車流量準確率比較圖 -東西向快 速公路... 1-15 圖1.3.3.1-15 尖峰時段(0700~0800) 小型車流量準確率比較圖 -東西向快 速公路... 1-16 圖1.3.3.1-16 尖峰時段(0700~0800) 機車流量準確率比較圖 -東西向快速 公路... 1-16 圖1.3.3.1-17 離峰時段(1212~1312)時段東西向快速道路系統辨識率圖1-17 圖1.3.3.1-18 離峰時段(1212~1312)大型車流量準確率比較圖 -東西向快 速公路... 1-17 圖1.3.3.1-19 離峰時段(1212~1312)小型車流量準確率比較圖 -東西向快 速公路... 1-18 圖1.3.3.1-20 離峰時段(1212~1312)機車流量準確率比較圖 -東西向快速 公路... 1-18 圖1.3.3.1-21 離峰時段(1312~1412)大型車流量準確率比較圖 -東西向快 速公路... 1-19 圖1.3.3.1-22 離峰時段(1312~1412)小型車流量準確率比較圖 -東西向快 速公路... 1-19 圖1.3.3.1-23 中華路五段車速準確率比較圖 ... 1-20 圖1.3.3.1-24 中華路五段車速準確率辨識率圖 ... 1-20
圖1.3.3.2-4 夜間時段機車流量準確率比較圖-中華路五段 ... 1-24 圖1.3.3.2-5 夜間時段中華路五段系統流量辨識率圖 ... 1-24 圖1.3.3.2-6 夜間時段大型車流量準確率比較圖-東西向快速公路 ... 1-25 圖1.3.3.2-7 夜間時段小型車流量準確率比較圖-東西向快速公路 ... 1-25 圖1.3.3.2-8 夜間時段機車流量準確率比較圖-東西向快速公路 ... 1-26 圖1.3.3.2-9 夜間時段東西向快速公路系統流量辨識率圖 ... 1-26 圖1.3.3.3-1 日夜交替時段大型車流量準確率比較圖-中華路五段 ... 1-27 圖1.3.3.3-2 日夜交替時段小型車流量準確率比較圖-中華路五段 ... 1-27 圖1.3.3.3-3 日夜交替時段機車流量準確率比較圖-中華路五段 ... 1-28 圖1.3.3.3-4 日夜交替時段中華路五段系統流量辨識率圖 ... 1-28 圖1.3.3.4-1 雨天時段中華路五段 684 巷巷口景像 ... 1-29 圖1.3.3.4-2 雨天大型車流量準確率比較圖-中華路五段 ... 1-29 圖1.3.3.4-3 雨天小型車流量準確率比較圖-中華路五段 ... 1-30 圖1.3.3.4-4 雨天機車流量準確率比較圖-中華路五段 ... 1-30 圖1.3.3.5-1 國道一號南下 48 公里處前期(95 年度)計畫試作結果 ... 1-32 圖1.3.3.5-2 國道一號南下 34 公里處前期(95 年度)計畫試作結果 ... 1-33 圖1.3.3.5-3 國道一號北上 66 公里處前期(95 年度)計畫試作結果 ... 1-34 圖1.5-1 車輛偵測系統流程圖 ... 1-39 圖2.1-1 硬體單元示意圖 ... 2-1 圖2.2-1 KMS-63W3N-CCD 攝影機 ... 2-2 圖2.2-2 8mm 鏡頭 ... 2-5 圖2.2-3 GL-607 室外用防護罩... 2-6 圖2.2-4 微星 MS6404 準系統電腦 ... 2-8 圖2.2-5 ADLink - RTV24 高速影像擷取卡 ... 2-9 圖2.2-6 ADSL 數據機(康全 CT-511C)... 2-11 圖2.2-7 東西向快速公路台 68 線南寮-竹東段武陵交流道口門型鋼架. 2-12 圖2.2-8 43.5x38.5 訊號控制箱 ... 2-14 圖2.3-1 交通部運輸研究所空照圖 ... 2-16 圖2.3-2 交通部運輸研究所空照示意圖 ... 2-16 圖2.3-3 交通部運輸研究所空照示意圖 ... 2-17 圖2.3-4 交通部運輸研究所前車道示意圖 ... 2-17
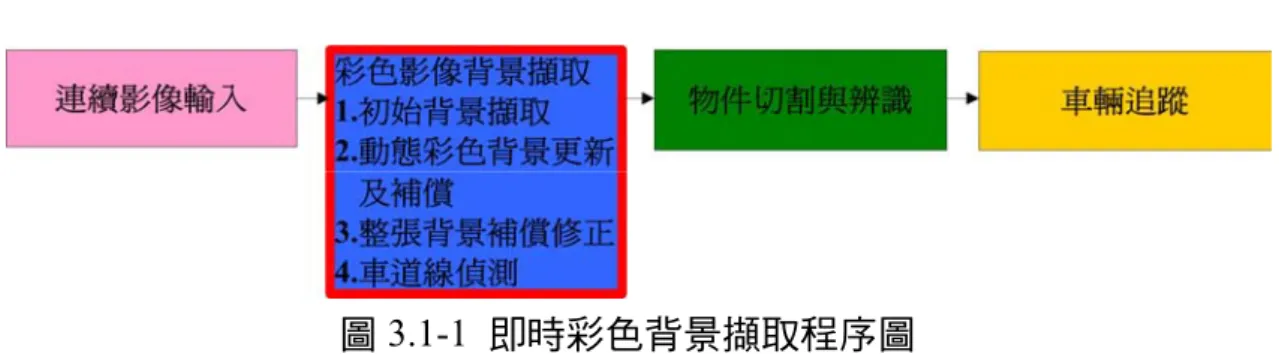
圖2.3-5 太陽日照所產生的樹蔭 ... 2-19 圖2.3-6 敦化北路背景測試 ... 2-19 圖2.3-7 新竹市中華路背景測試 ... 2-20 圖2.3-8 路燈遮蔽所產生的樹蔭 ... 2-20 圖2.3-9 臨時照明設計圖 ... 2-21 圖2.3-10 活動燈架架設過程 ... 2-22 圖2.3-11 活動燈架架設前 ... 2-23 圖2.3-12 活動燈架架設後 ... 2-23 圖2.3-13 運研所前進行照明設備架設 ... 2-24 圖2.3-14 輔助光源裝設 ... 2-24 圖2.3-15 輔助光源架設後 ... 2-24 圖2.3-16 日、夜影像概況 ... 2-25 圖3-1 影像處理軟體架構圖 ... 3-1 圖3.1-1 即時彩色背景擷取程序圖 ... 3-2 圖3.1-2 燈光切換瞬間背景相減示意圖與結果 ... 3-5 圖3.1-3 背景更新流程圖 ... 3-6 圖3.1-4 燈光切換偵測區示意圖 ... 3-7 圖3.1-5 燈光切換的背景更新示意圖 ... 3-11 圖3.1-6 車道線偵測流程 ... 3-12 圖3.1-7 Sobel 遮罩 ... 3-13 圖3.1-8 背景影像進行 Sobel 邊緣偵測 ... 3-13 圖3.1-9 背景邊緣影像連通後影像 ... 3-14 圖3.1-10 斜率和截距相近線段 ... 3-15 圖3.1-11 車道劃分 ... 3-15 圖3.2-1 即時彩色背景擷取程序圖 ... 3-16 圖3.2-2 物件是否切割流程圖 ... 3-17
圖3.2-8 8 連通示意圖 ... 3-23 圖3.2-9 連通物件 ... 3-24 圖3.2-10 連通法流程圖 ... 3-25 圖3.3-1 即時多車輛追蹤程序圖 ... 3-28 圖3.3-2 追蹤參考點 ... 3-29 圖3.3-3 移動物體對應法流程 ... 3-30 圖3.3-4 車輛追蹤連續影像 ... 3-31 圖3.3-5 出現雜訊有追蹤未給予統計 ... 3-33 圖3.3-6 正確追蹤車輛 ... 3-34 圖3.4-1 等候長度意示圖 ... 3-39 圖3.4-2 等候長度側視圖 ... 3-39 圖3.5-1 本期系統整合介面外觀 ... 3-42 圖3.5-2 前期系統整合介面外觀 ... 3-42 圖3.5-3 本期系統介面外觀區塊 ... 3-43 圖3.5-4 影像監視區 ... 3-43 圖3.5-5 車道運動車輛資訊區 ... 3-44 圖3.5-6 系統操作區 ... 3-44 圖4.1-1 系統日出及日落時段,系統辨識準確度分析圖 ... 4-2 圖4.1-2 系統離、尖峰時段,系統辨識準確度分析圖 ... 4-2 圖4.2-1 系統日出及日落時段,系統辨識準確度分析圖 ... 4-6 圖4.2-2 系統離、尖峰時段,系統辨識準確度分析圖 ... 4-6 圖4.3-1 掉落物偵測 ... 4-13 圖4.3-2 行人違規穿越馬路 ... 4-14 圖4.3-3 車輛違規逆向行駛 ... 4-15 圖4.3-4 車輛違規路邊停放 ... 4-16 圖4.3-5 員樹林天橋作業 ... 4-17 圖4.3-6 員樹林壅塞路段示意 ... 4-17 圖4.3-7 壅塞偵測 ... 4-18 圖4.3-8 等待長度及壅塞偵測 ... 4-19 圖5.1.1-1 錄製雪山隧道影像資料之小型 PC ... 5-2 圖5.1.1-2 雪山隧道機房內之影像多工器 ... 5-2
圖5.1.1-3 機房內錄影程式畫面 ... 5-2 圖5.1.1-4 雪山隧道 CCTV 編號 2076 攝影機畫面 ... 5-3 圖5.1.1-5 雪山隧道 CCTV 編號 2073 攝影機畫面 ... 5-4 圖5.1.1-6 雪山隧道 CCTV 編號 2069 攝影機畫面 ... 5-5 圖5.1.1-7 雪山隧道 CCTV 編號 2068 攝影機畫面 ... 5-6 圖5.1.2-1 八卦山隧道火燒車救災演習 ... 5-8 圖5.1.2-2 八卦山數位化監視系統畫面(相機翻拍) ... 5-8 圖5.1.3-1 建國南路_信義路 CCTV 影像時間列表 ... 5-9 圖5.2-1 完整雪山隧道 CCTV 影像資料共 465GB ... 5-13 圖5.2-2 以小時為單位整理所有的影像資料 ... 5-13 圖5.2.1-1 雪山隧道照明分區及輝度曲線圖 ... 5-14 圖5.2.1-2 隧道內燈光開啟狀況 ... 5-15 圖5.2.1-3 隧道內燈光關閉狀況 ... 5-16 圖5.2.2-1 FPS 為 1 之擷取影像... 5-17 圖5.2.2-2 FPS 為 3 之擷取影像... 5-18 圖5.3-1 隧道內壅塞狀況 ... 5-19 圖5.3-2 隧道內變換車道 ... 5-20 圖5.3-3 隧道內無故停止 ... 5-21 圖5.4-1 CCTV 影像有效偵測區域示意... 5-22 圖5.4.1-1 雪山隧道編號第 2076 支 CCTV 攝影機連續影像 ... 5-24 圖5.4.1-2 雪山隧道編號第 2076 支 CCTV 攝影機收斂的背景影像 ... 5-24 圖5.4.1-3 雪山隧道編號第 2073 支 CCTV 攝影機連續影像 ... 5-25 圖5.4.1-4 雪山隧道編號第 2073 支 CCTV 攝影機收斂的背景影像 ... 5-25 圖5.4.1-5 雪山隧道編號第 2069 支 CCTV 攝影機連續影像 ... 5-26 圖5.4.1-6 雪山隧道編號第 2069 支 CCTV 攝影機收斂的背景影像 ... 5-26 圖5.4.1-7 雪山隧道編號第 2068 支 CCTV 攝影機連續影像 ... 5-27
圖5.4.3-1 雪山隧道編號 2069 攝影機車輛偵測影像 ... 5-32 圖5.4.3-2 雪山隧道編號 2068 攝影機車輛偵測影像 ... 5-33 圖5.4.4-1 垂直軌跡示意圖 ... 5-35 圖5.4.4-2 水平軌跡示意圖 ... 5-35 圖5.4.4-3 水平校正示意圖 ... 5-35 圖5.4.4-4 雪山隧道編號 2068 攝影機連續影像車輛追蹤 ... 5-37 圖5.4.4-5 雪山隧道編號 2069 攝影機連續影像車輛追蹤 ... 5-38 圖5.5-1 臺北市建國高架橋信義路段 CCTV 影像試作成果 ... 5-45 圖5.6-1 無事件之原始車輛偵測流程圖 ... 5-46 圖5.6-2 事件警示車輛偵測流程圖 ... 5-47 圖5.6-3 連續影像靜止車輛偵測 ... 5-48 圖5.6-4 連續影像之變換車道 ... 5-49 圖5.6-5 連續影像之變換車道 ... 5-50 圖5.7-1 車輛間距示意圖 ... 5-51 圖6.2.3-1 車輛交疊示意圖 ... 6-6 圖7.1-1 台 68 快速公路武陵交流道口測試結果 ... 7-2 圖7.1-2 敦化北路交通部運輸研究所前測試結果 ... 7-3 圖7.1-3 台 68 快速公路武陵交流道口各種天候辨識統計結果 ... 7-3 圖7.1-4 系統離、尖峰時段,系統辨識準確度分析圖 ... 7-4 圖7.1-5 台 68 快速公路武陵交流道口各種天候辨識分析影像 ... 7-5
表目錄
表2.2-1 KMS-63W3N-CCD 攝影機 ... 2-3 表2.2-2 KMS-63W3N-CCD 攝影機優點 ... 2-4 表2.2-3 8mm 鏡頭規格 ... 2-5 表2.2-4 GL-607 室外用防護罩規格... 2-7 表2.2-5 康全 CT-511C 規格... 2-10 表3.2-1 實際車輛的長度及寬度 ... 3-26 表3.2-2 車輛視覺長度及寬度在中華路 ... 3-26 表4.1-1 車流量準確率統計表-台 68 快速公路 ... 4-3 表4.1-2 台 68 快速公路車速準確率統計表 ... 4-4 表4.2-1 車流量準確率統計表-交通部運輸研究所 ... 4-7 表4.2-2 交通部運輸研究所前車速準確率統計表 ... 4-8 表4.2-3 車流量準確率統計表-交通部運輸研究所(第一車道) ... 4-9 表4.2-4 車流量準確率統計表-交通部運輸研究所(第二車道) ... 4-10 表4.2-5 車流量準確率統計表-交通部運輸研究所(第三車道) ... 4-11 表4.2-6 車流量準確率統計表-交通部運輸研究所 ... 4-12 表5.1-1 CCTV 影像特性分析... 5-11 表5.5-1 影像式車輛辨識系統整合於臺北市 CCTV 之試作分析 ... 5-44第一章 緒 論
1.1 研究背景與目的
根 據 目 前 各 國 交 通 單 位 實 測 評 估 報 告 中 指 出 , 於 未 來 ITS
(Intelligent Transportation Systems) 的發展上,影像式車輛偵測器將逐 步成為自動化路況資訊偵測系統的重要一環,透過影像式車輛偵測 器,除了可以產生交通量、速度等相關交通參數,其影像辨識之演算 邏輯並能與交控中心之 CCTV 加以整合,使它具有直觀的車流影像資 訊,便於掌握交通動態,進而適時處置交通突發事件及採取適當的控 制策略等,使得影像式車輛偵測器在ITS 的發展上具一定的重要性。 影像式車輛偵測器主要是由攝影機及控制處理器 2 部分組成,其 偵測器系統功能在於利用現行道路用之監視攝影機來拍攝路面的連續 影像,再經由控制處理器依影像處理及電腦視覺之概念運用,偵測出 於道路上行駛的車輛,同時加以辨識與分析,控制處理器除了對各車 道車輛精確的計數外,亦可依照辨識出的車輛,計算出各種車輛的車 速、車種、車間距…等等的交通資訊,同時提供直觀式之即時影像畫 面。 本研究期望可以研發具偵測國內複雜交通環境、降低系統設置成 本與提高未來維修與改良空間之車輛偵測器,透過本研究成果的技術 研發,將可提昇國內相關產業技術,達到扶植產學研之技術研究與落 實產品開發的目標,未來經過技術轉移,與國內廠商合作達產品化階 段後,將可投入市場大量生產,進而大幅降低設備成本,對於未來普 遍設置偵測器以提供塞車資訊及提昇產業競爭力有莫大助益。
功能之提昇及改善,同時在新竹市中華路五段以及新竹東西向快速公 路武陵交流道口附近實地架設測試,並且完成初步系統介面設計。 本年度,除了持續進行更多面向的功能擴充、測試及改善,以期 所研發之偵測器更適用於不同環境及交通特性之應用外,在測試地點 方面,新增了交通狀況相當複雜的敦化北路(本所前方路段)以及雪山隧 道,在偵測項目部份則納入事件偵測的試作,同時,考量到所開發系 統與實務單位已建置CCTV 之整合,本研究擷取臺北市交控中心 CCTV 影像系統所提供的影像進行車輛偵測之試作,以作為未來將車輛/事件 偵測系統與CCTV 整合之重要依據。
1.3 前期計畫研究成果
前期(95 年度)開發之影像式車輛偵測器,在考量 1 小時內所行駛 車種之多樣性及一般市區道路會有汽機車混雜行駛之因素,擇新竹市 中華路五段684 巷巷口(N 24°45'54",E 120°54'50")及東西向快速公路台 68 線南寮-竹東段武陵交流道口(N 24°49'34",E 120°58'13")設置影像式 偵測器各乙部(地圖位置如圖 1.3-1 所示),進行現地影像擷取分析測 試,前期偵測器裝設位置概述、系統整合介面外觀及資料統計結果如 後述。 圖1.3-1 前期(95 年度)影像式偵測器裝設位置圖1.3.1 前期偵測器裝設位置概述
一、中華路五段684 巷巷口(N 24°45'54",E 120°54'50") 此路口係由中華路及中華路 684 巷所組成的岔型路口(如圖 1.3.1-1),由現場觀察發現,該路段由於鄰近工廠及地處連繫新竹 市與南向交通之樞紐,故在任一時段均可見大型車輛行經。中華 路路面寛約20 公尺雙向 4 線混合車道,車道以中央分隔島分隔南 北向車道,每一車道寬均約 3.9 公尺,其兩側均設有約 2~3 公尺 的路肩及約3~4 公尺的行人道。 圖1.3.1-1 中華路五段 684 巷路口車道示意圖 二、東西向快速公路台68 線南寮-竹東段武陵交流道口(N 24°49'34",E圖 1.3.1-2 東西向快速公路台 68 線南寮-竹東段車道示意圖
1.3.2 前期系統整合介面外觀
前期研究計畫採行以 Microsoft Visual C++為系統之主要編譯軟 體,進行系統整合,前期系統整合介面外觀如圖1.3.2-1 所示,介面外 觀大致可區分為影像監視區、車道運動車輛資訊區、系統操作區及合 作伙伴標示區4 區塊如圖 1.3.2-2。 圖1.3.2-1 前期系統整合介面外觀圖1.3.2-2 前期系統介面外觀區塊 系統介面操作簡述如下: ㄧ、影像監視區: 本區主要顯示目前CCD 攝影機即時監控所得影像,影像中辨 識框顏色依車型及追蹤程度共計區分為4 種顏: 1. 灰 色:大型車(如圖 1.3.2-3a) 2. 紅 色:機車(如圖 1.3.2-3b) 3. 粉紅色:小型車(如圖 1.3.2-3c) 4. 淡藍色:已追蹤但尚未辨識車型(如圖 1.3.2-3c) 大部份車輛在尚未進入辨識區前,皆先以淡藍色追蹤框標 示,待被追蹤車輛進入系統所設定之辨識範圍,系統即依相關演 算法對移動車輛進行辨識,當符合相關車種條件後,則依其標繪 相對應車種之追蹤框完成辨識工作。
二、車輛資訊區: 本區可同時顯示各車道內移動車輛車種的累加數量及不斷顯 示更新在辨識區內之即時車速,另於該區最右邊附加顯示 3 車道 所經各型車種累加及總和數量,如圖1.3.2-4。 圖1.3.2-4 車道運動車輛資訊區 三、系統操作區: 本區包含7 個功能鍵及 1 個條件輸入框(如圖 1.3.2-5),各鍵功 能詳述如下: 1. Open Img:開啟所要辨識圖檔的首張影像,其所觸發之對話 框如圖1.3.2-6a 及圖 1.3.2-6b。 2. VMS:使系統完成各項初始設定,此一功能鍵在使用者觸擊 後,功能鍵將自動消失,此時系統將自行偵測影像完成各項 參數設定,其所觸發之狀態如圖1.3.2-6c。 3. Start Run:功能鍵在觸擊後,系統會先使影像監視區呈現黑色 (約 2~3 秒),系統此時正自行進行背影影像收斂,在自動完成 背影收斂後系統正式執行車輛偵測辨識功能,如圖 1.3.2-6d 及圖1.3.2-6e。 4. Save Background:操作者可自行決定是否儲存系統所自動完 成背景收斂的結果,其所觸發之狀態如圖1.3.2-6f。 5. Save Foreground:操作者可自行決定是否儲存系統所自動完成 之前景切割結果,其所觸發之狀態如圖1.3.2-6g。 6. Save Result:操作者可自行決定是否儲存系統所自動完成車輛 3
7. Exit:離開操作區。
8. 條件輸入框:讓操作者輸入欲完成的影像張數。
圖1.3.2-5 系統操作區
(a) (b) (c)
四、合作伙伴標示區: 本區分別由本所、國立交通大學及國防大學中正理工學院 3 單位徽章所組成,並共同協力完成此一系統之研發(如圖 1.3.2-7)。 圖1.3.2-7 合作伙伴標示區
1.3.3 前期偵測器資料統計結果
前期偵測器分別於日、夜間、日夜交替及雨天時段進行測試,其 測試結果概述如下:1.3.3.1 日間準確率(含尖、離峰時段)
實測數據為前期影像式車輛偵測器於中華路五段 684 巷巷口 (N 24°45'54",E 120°54'50")及東西向快速公路台 68 線南寮-竹東段 武陵交流道口(N 24°49'34",E 120°58'13")之車行數量,並以人工計 數方式與其比較,計算準確率。實際觀測時間為 6 小時(7~9 尖峰 時段各2 小時,離峰時段各 1 小時),準確率計算方式為每分鐘誤 差數的總和取絕對值之後再除以人工計數車輛總和,而車速之準 確率則是將系統所得之車速與雷射槍所測得之結果相較所獲之準 確率,如圖1.3.3.1-1~圖 1.3.3.1-26 所示。 車流量:中華路五段/尖峰時段 (0640~0740、0740~0840) 中華路尖峰時段車輛偵測的平均準確率在 95 年度計畫成果統計之說明如圖1.3.3.1-1 與圖 1.3.3.1-2(以兩個時段分別顯示),車種準確率 則以圖表方式呈現於圖1.3.3.1-3 ~ 圖 1.3.3.1-8。 圖1.3.3.1-1 尖峰時段(0640~0740)中華路五段 95 年度系統與 94 年度系統準 確率比較圖 中華路尖峰時段(0640~0740)本期系統與前期系統辨識率比對圖 0% 25% 50% 75% 100% 大型車 中型車 機車 全車型 人工計次 95 年度系統 94 年度系統 中華路尖峰時段(0740~0840)本期系統與前期系統辨識率比對圖 0% 25% 50% 75% 100% 大型車 中型車 全車型 人工計次 95 年度系統 94 年度系統
中華路大型車VD與人工計算比較圖(1026) 0 10 20 30 40 50 60 時間 輛 VD 1 2 4 3 0 1 1 1 4 0 3 1 人工 1 0 0 2 0 4 1 1 3 1 3 1 06:45 06:50 06:55 07:00 07:05 07:10 07:15 07:20 07:25 07:30 07:35 07:40 圖 1.3.3.1-3 尖峰時段(0640~0740)大型車流量準確率比較圖-中華路五段 中華路小型車VD與人工計算比較圖(1026) 0 10 20 30 40 50 60 時間 輛 VD 40 42 57 43 37 39 38 34 52 49 43 40 人工 39 42 55 45 35 38 37 35 48 45 40 41 6:45 6:50 6:55 7:00 7:05 7:10 7:15 7:20 7:25 7:30 7:35 7:40 圖 1.3.3.1-4 尖峰時段(0640~0740)小型車流量準確率比較圖-中華路五段
中華路機車VD與人工計算比較圖(1026) 0 10 20 30 40 50 60 70 80 時間 輛 VD 72 50 45 36 24 23 31 31 37 32 41 31 人工 72 51 45 37 25 25 32 29 34 30 34 29 6:45 6:50 6:55 7:00 7:05 7:10 7:15 7:20 7:25 7:30 7:35 7:40 圖 1.3.3.1-5 尖峰時段(0640~0740)機車流量準確率比較圖-中華路五段 中華路大型車VD與人工計算比較圖(1026) 0 10 20 30 40 50 60 時間 輛 VD 3 2 1 0 1 2 3 0 3 1 2 1 人工 3 3 1 1 1 4 3 0 3 3 2 2 7:45 7:50 7:55 8:00 8:05 8:10 8:15 8:20 8:25 8:30 8:35 8:40 圖 1.3.3.1-6 尖峰時段(0740~0840)大型車流量準確率比較圖-中華路五段
中華路小型車VD與人工計算比較圖(1026) 0 10 20 30 40 50 60 時間 輛 VD 29 44 50 40 37 32 57 37 29 40 34 44 人工 28 40 45 44 38 32 53 37 30 37 33 40 7:45 7:50 7:55 8:00 8:05 8:10 8:15 8:20 8:25 8:30 8:35 8:40 圖 1.3.3.1-7 尖峰時段(0740~0840)小型車流量準確率比較圖-中華路五段 中華路機車VD與人工計算比較圖(1026) 0 10 20 30 40 50 60 時間 輛 VD 32 22 23 19 36 26 18 18 18 12 10 11 人工 31 21 19 19 34 28 22 22 25 20 17 19 7:45 7:50 7:55 8:00 8:05 8:10 8:15 8:20 8:25 8:30 8:35 8:40 圖 1.3.3.1-8 尖峰時段(0740~0840)機車流量準確率比較圖-中華路五段
車流量:中華路五段/離峰時段(1240~1350) 中華路離峰時段車輛偵測的平均準確率在95 年度計畫成果統計中 為96.74%,與 94 年度系統之比較說明如圖 1.3.3.1-9。車種準確率則以 圖表方式呈現於圖1.3.3.1-10 ~ 圖 1.3.3.1-12。 圖1.3.3.1-9 離峰時段(1240~1340)中華路五段 95 年度系統與 94 年度系統準 確率比較圖 中華路大型車VD與人工計算比較圖(1026) 20 30 40 50 60 輛 中華路離峰時段(1240~1349)本期系統與前期系統辨識率比對圖 0% 25% 50% 75% 100% 大型車 中型車 機車 全車型 人工計次 95 年度系統 94 年度系統
中華路小型車VD與人工計算比較圖(1026) 0 10 20 30 40 50 60 時間 輛 VD 29 29 24 29 38 27 33 25 18 10 22 24 20 7 人工 28 29 23 28 38 27 30 25 15 9 18 21 18 8 12:45 12:50 12:55 13:00 13:05 13:10 13:15 13:20 13:25 13:30 13:35 13:40 13:45 13:50 圖1.3.3.1-11 離峰時段(1240~1350)小型車流量準確率比較圖-中華路五段 中華路機車VD與人工計算比較圖(1026) 0 10 20 30 40 50 60 時間 輛 VD 12 16 21 16 17 21 23 10 6 9 11 11 15 6 人工 11 16 23 15 17 21 25 10 9 9 10 12 11 4 12:45 12:50 12:55 13:00 13:05 13:10 13:15 13:20 13:25 13:30 13:35 13:40 13:45 13:50 圖 1.3.3.1-12 離峰時段(1240~1350)機車流量準確率比較圖-中華路五段 車流量:東西向快速公路台68/尖峰時段(0700~0800) 快速公路尖峰時段車輛偵測的平均準確率在95 年度計畫成果統計 中為96%,統計時段內,每 5 分鐘的準確率如圖 1.3.3.1-13。車種準確 率則以圖表方式呈現於圖1.3.3.1-14 ~ 圖 1.3.3.1-16。
東西向快速道路武陵交流道口系統辨識率圖(11月18日 0700~0800) 0% 20% 40% 60% 80% 100% 時間 辨識率 系統辨識率 100% 94% 100% 93% 90% 100% 97% 100% 94% 97% 80% 89% 07:05 07:10 07:15 07:20 07:25 07:30 07:35 07:40 07:45 07:50 07:55 08:00 圖1.3.3.1-13 尖峰時段(0700~0800)東西向快速道路系統辨識率圖 東西向快速道路大型車VD與人工計算比較圖(1116) 0 10 20 30 40 50 60 時間 輛 VD 0 1 0 0 1 0 7 3 0 1 7 7 人工 1 2 0 1 1 0 7 4 0 1 5 6 7:05 7:10 7:15 7:20 7:25 7:30 7:35 7:40 7:45 7:50 7:55 8:00 圖1.3.3.1-14 尖峰時段(0700~0800) 大型車流量準確率比較圖 -東西向快速公路
東西向快速道路小型車VD與人工計算比較圖(1116) 0 10 20 30 40 50 60 時間 輛 VD 22 19 21 27 21 32 30 35 36 46 35 23 人工 21 16 21 27 19 32 29 34 34 45 30 22 7:05 7:10 7:15 7:20 7:25 7:30 7:35 7:40 7:45 7:50 7:55 8:00 圖1.3.3.1-15 尖峰時段(0700~0800) 小型車流量準確率比較圖 -東西向快速公路 東西向快速道路機車VD與人工計算比較圖(1116) 0 10 20 30 40 50 60 時間 輛 VD 0 0 0 0 1 0 0 0 0 0 0 0 人工 0 0 0 0 1 0 0 0 0 0 0 0 7:05 7:10 7:15 7:20 7:25 7:30 7:35 7:40 7:45 7:50 7:55 8:00 圖1.3.3.1-16 尖峰時段(0700~0800) 機車流量準確率比較圖 -東西向快速公路
車流量:東西向快速公路台68/離峰時段(1212~1312) 快速公路離峰時段車輛偵測的平均準確率在95 年度計畫成果統計 中為86%,統計時段內每 5 分鐘的準確率如圖 1.3.3.1-17。車種準確率 則以圖表方式呈現於圖1.3.3.1-18 ~ 圖 1.3.3.1-20。 東西向快速道路武陵交流道口系統辨識率圖(11月8日 1213~1312) 0% 20% 40% 60% 80% 100% 時間 辨識率 系統辨識率 92% 85% 100% 94% 100% 82% 88% 89% 82% 84% 72% 57% 12:17 12:22 12:27 12:32 12:37 12:42 12:47 12:52 12:57 13:02 13:07 13:12 圖1.3.3.1-17 離峰時段(1212~1312)時段東西向快速道路系統辨識率圖 東西向快速道路大型車VD與人工計算比較圖(1108) 0 10 20 30 40 50 60 輛 12:17 12:22 12:27 12:32 12:37 12:42 12:47 12:52 12:57 13:02 13:07 13:12
東西向快速道路小型車VD與人工計算比較圖(1108) 0 10 20 30 40 50 60 時間 輛 VD 24 18 23 18 19 18 17 32 17 20 18 19 人工 23 16 21 16 19 15 14 29 15 18 14 15 12:17 12:22 12:27 12:32 12:37 12:42 12:47 12:52 12:57 13:02 13:07 13:12 圖1.3.3.1-19 離峰時段(1212~1312)小型車流量準確率比較圖 -東西向快速公路 東西向快速道路機車VD與人工計算比較圖(1108) 0 10 20 30 40 50 60 時間 輛 VD 0 0 0 0 0 0 0 0 0 0 0 0 人工 0 0 1 0 0 0 0 0 0 0 0 0 12:17 12:22 12:27 12:32 12:37 12:42 12:47 12:52 12:57 13:02 13:07 13:12 圖1.3.3.1-20 離峰時段(1212~1312)機車流量準確率比較圖 -東西向快速公路
車流量:東西向快速公路台68/離峰時段(1312~1412) 快速公路離峰時段車輛偵測的平均準確率在95 年度計畫成果統計 中 為 91% , 車 種 準 確 率 則 以 圖 表 方 式 呈 現 於 圖 1.3.3.1-21 ~ 圖 1.3.3.1-22。 東西向快速道路大型車VD與人工計算比較圖(1108) 0 10 20 30 40 50 60 時間 輛 VD 6 2 6 2 6 2 4 3 2 3 2 2 人工 6 2 5 2 6 2 3 3 2 2 0 2 13:17 13:22 13:27 13:32 13:37 13:42 13:47 13:52 13:57 14:02 14:07 14:12 圖1.3.3.1-21 離峰時段(1312~1412)大型車流量準確率比較圖 -東西向快速公路 東西向快速道路小型車VD與人工計算比較圖(1108) 10 20 30 40 50 60 輛
在30 個有效樣本統計下,與雷射槍測量相較,中華路五段路段其車速 平均準確率為95%,在快速公路路段同樣取 30 個有效樣本,平均準確率亦 在95%以上。 車速:中華路五段 中華路VD車速的測速槍車速比較圖(1108) -10 10 30 50 70 90 取樣車車號 車速( 公里/ 小時) VD 53 40 55 43 49 66 49 48 55 56 50 50 63 42 50 62 42 42 47 30 41 65 68 64 40 48 29 49 55 40 測速槍 47 38 54 44 55 64 46 48 53 55 53 43 62 43 52 65 45 45 48 31 40 62 64 64 40 40 31 51 56 38 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 圖 1.3.3.1-23 中華路五段車速準確率比較圖 中華路本期系統辨識率(1108) 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 取樣車號 辨識率 圖1.3.3.1-24 中華路五段車速準確率辨識率圖
車速:東西向快速公路台68 東西向快速道路VD車速的測速槍車速比較圖(1108) -10 10 30 50 70 90 110 130 取樣車車號 車速( 公里/ 小時) VD 80 87 81 72 84 11 96 10 80 70 95 77 90 86 82 78 96 86 77 85 66 75 83 77 65 81 79 78 70 75 測速槍 82 87 77 72 85 12 97 97 81 77 10 77 85 89 83 78 94 87 81 84 66 79 83 81 78 81 76 81 74 71 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 圖1.3.3.1-25 東西向快速公路車速準確率比較圖 東西向快速道路本期系統辨識率(1108) 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 取樣車號 辨識率
1.3.3.2 夜間準確率
實測地點為中華路五段684 巷巷口(N 24°45'54",E 120°54'50") 及 東 西 向 快 速 公 路 台 68 線 南 寮 - 竹 東 段 武 陵 交 流 道 口 (N 24°49'34",E 120°58'13"),中華路五段之調查時間為 10 月 28 日 17:40 至 18:39 時段,天色已暗(如圖 1.3.3.2-1),屬於夜間時段(根 據中央氣象局資料 2005.10.28 當日日落為 17:19),而東西向快 速公路之調查時間為 11 月 08 日 22:12 至 23:12 時,相關之夜間準 確率統計結果如圖1.3.3.2-2~圖 1.3.3.2-8 所示,中華路五段之夜間 辨識率約達九成,而快速公路部分,大部分時段皆可達九成之辨 識率,惟部分時段由於車輛並不多,因此少數之誤判車輛即影響 辨識之準確率。 圖1.3.3.2-1 夜間時段中華路五段 684 巷巷口景像中華路夜間時段大型車VD與人工計算比較圖(1028) 0 10 20 30 40 50 60 時間 輛 VD 2 3 4 3 2 1 2 0 1 0 4 0 人工 0 2 3 1 2 1 2 1 1 0 4 0 17:45 17:50 17:55 18:00 18:05 18:10 18:15 18:20 18:25 18:30 18:35 18:40 圖 1.3.3.2-2 夜間時段大型車流量準確率比較圖-中華路五段 中華路夜間時段小型車VD與人工計算比較圖(1028) 0 10 20 30 40 50 60 70 時間 輛 VD 55 51 47 40 54 53 49 26 54 55 48 34 人工 58 49 45 43 51 52 46 30 47 56 50 37 17:45 17:50 17:55 18:00 18:05 18:10 18:15 18:20 18:25 18:30 18:35 18:40 圖 1.3.3.2-3 夜間時段小型車流量準確率比較圖-中華路五段
中華路機車VD與人工計算比較圖(1028) 0 10 20 30 40 50 60 時間 輛 VD 27 17 29 24 15 27 22 29 29 22 20 21 人工 36 26 36 25 21 33 34 27 41 31 23 24 17:45 17:50 17:55 18:00 18:05 18:10 18:15 18:20 18:25 18:30 18:35 18:40 圖1.3.3.2-4 夜間時段機車流量準確率比較圖-中華路五段 中華路夜間準確率VD與人工計算比較圖(1028) 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% 17:45 17:50 17:55 18:00 18:05 18:10 18:15 18:20 18:25 18:30 18:35 18:40 時間 辨識率 圖 1.3.3.2-5 夜間時段中華路五段系統流量辨識率圖
東西向快速道路夜間時段大型車VD與人工計算比較圖(1108) 0 10 20 30 40 50 60 時間 輛 VD 2 2 3 4 6 2 5 0 2 0 2 3 人工 1 0 1 0 0 1 1 0 0 0 0 1 22:27 22:32 22:37 22:42 22:47 22:52 22:57 23:02 23:07 23:12 23:17 23:22 圖1.3.3.2-6 夜間時段大型車流量準確率比較圖-東西向快速公路 東西向快速道路夜間時段小型車VD與人工計算比較圖(1108) 0 10 20 30 40 50 60 時間 輛 VD 16 4 8 10 7 7 16 15 12 7 10 8 人工 16 4 9 15 12 7 15 15 13 7 11 8 22:27 22:32 22:37 22:42 22:47 22:52 22:57 23:02 23:07 23:12 23:17 23:22 圖1.3.3.2-7 夜間時段小型車流量準確率比較圖-東西向快速公路
東西向快速道路機車VD與人工計算比較圖(1108) 0 10 20 30 40 50 60 時間 輛 VD 0 0 0 0 0 0 0 1 0 0 0 0 人工 0 0 0 0 0 0 0 0 0 0 0 0 22:27 22:32 22:37 22:42 22:47 22:52 22:57 23:02 23:07 23:12 23:17 23:22 圖 1.3.3.2-8 夜間時段機車流量準確率比較圖-東西向快速公路 東西向快速道路夜間準確率VD與人工計算比較圖(1108) 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% 22:27 22:32 22:37 22:42 22:47 22:52 22:57 23:02 23:07 23:12 23:17 23:22 時間 辨識率 圖1.3.3.2-9 夜間時段東西向快速公路系統流量辨識率圖
1.3.3.3 日夜交替辨識率
實 測 地 點 為 中 華 路 五 段 684 巷 巷 口 (N 24°45'54",E 120°54'50"),實測時間為 10 月 28 日 16:40 至 17:40 時正處日夜交 替(根據中央氣象局資料2005.10.28 當日日落時間為 17:19)時 段,相關準確率統計如圖1.3.3.3-1~圖 1.3.3.3-4 所示,除一個時段 未達九成,其它時段皆與一般時段無異,顯示所開發系統可克服中華路日夜交替時段大型車VD與人工計算比較圖 0 10 20 30 40 50 60 時間 輛 VD 0 1 1 3 1 0 0 1 1 1 2 3 人工 0 1 1 3 2 1 0 1 1 2 1 1 16:45 16:50 16:55 17:00 17:05 17:10 17:15 17:20 17:25 17:30 17:35 17:40 圖1.3.3.3-1 日夜交替時段大型車流量準確率比較圖-中華路五段 圖1.3.3.3-2 日夜交替時段小型車流量準確率比較圖-中華路五段 中華路日夜交替時段小型車VD與人工計算比較圖 0 20 40 60 80 時間 輛 VD 41 49 45 35 31 30 52 59 53 52 49 39 人工 39 49 45 37 30 29 52 61 47 43 42 45 16:45 16:50 16:55 17:00 17:05 17:10 17:15 17:20 17:25 17:30 17:35 17:40
中華路日夜交替時段機車VD與人工計算比較圖 0 10 20 30 40 50 60 時間 輛 VD 28 13 29 22 24 24 44 23 22 15 11 12 人工 29 13 29 23 25 24 44 22 27 25 20 17 16:45 16:50 16:55 17:00 17:05 17:10 17:15 17:20 17:25 17:30 17:35 17:40 圖 1.3.3.3-3 日夜交替時段機車流量準確率比較圖-中華路五段 中華路日夜交替時段辨識率分析圖 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% 16:45 16:50 16:55 17:00 17:05 17:10 17:15 17:20 17:25 17:30 17:35 17:40 時間 辨識率 圖1.3.3.3-4 日夜交替時段中華路五段系統流量辨識率圖
1.3.3.4 雨天準確率
實 測 地 點 位 於 中 華 路 五 段 684 巷 巷 口 (N 24°45'54",E 120°54'50"),時段為 11 月 02 日 09:10 至 10:09,該路段正處下雨 時段如圖 1.3.3.4-1,所獲之準確率如圖 1.3.3.4-2~圖 1.3.3.4-5 所 示,準確率皆可達九成以上,顯示系統不受雨天干擾。圖1.3.3.4-1 雨天時段中華路五段 684 巷巷口景像 雨天中華路大型車VD與人工計算比較圖 0 10 20 30 40 50 60 時間 輛 VD 0 0 0 4 3 2 3 2 3 2 4 1 人工 1 0 1 7 3 2 2 4 4 4 4 1 09:10 09:15 09:20 09:25 09:30 09:35 09:40 09:45 09:50 09:55 10:00 10:05 圖1.3.3.4-2 雨天大型車流量準確率比較圖-中華路五段
兩天中華路小型車VD與人工計算比較圖 0 10 20 30 40 50 60 時間 輛 VD 33 33 25 46 28 56 41 40 43 46 27 33 人工 34 30 24 44 28 50 40 39 45 48 31 36 09:10 09:15 09:20 09:25 09:30 09:35 09:40 09:45 09:50 09:55 10:00 10:05 圖1.3.3.4-3 雨天小型車流量準確率比較圖-中華路五段 雨天中華路機車VD與人工計算比較圖 0 10 20 30 40 50 60 時間 輛 VD 17 14 10 15 8 12 29 16 16 12 18 14 人工 17 11 11 13 6 13 25 17 15 11 17 14 09:10 09:15 09:20 09:25 09:30 09:35 09:40 09:45 09:50 09:55 10:00 10:05 圖 1.3.3.4-4 雨天機車流量準確率比較圖-中華路五段
中華路雨天辨識率分析圖 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% 09:10 09:15 09:20 09:25 09:30 09:35 09:40 09:45 09:50 09:55 10:00 10:05 時間 辨識率
1.3.3.5 與 CCTV 整合試作
前期研究中,除了自行於快速公路及省道架設攝影機以瞭解 系統辨識能力,如何將開發系統與既有架設於各縣市、高快速公 路之CCTV 影像結合,使 CCTV 影像除具原有之監視與紀錄功能 外,更能夠同時得到交通車流之部分資訊,此亦為前期研究之重 要工作項目之一,以期在現有架構以及不需增加太高成本的條件 下,能夠提供便民的資訊予交通管理人及所有用路人。 前期計畫中,本研究得到國道泰山交控中心大力支援,取得 一些國道CCTV 影像片段,探討將影像式車輛偵測器的演算法移 植至CCTV 影像系統之可行性及初步試作,測試結果如圖 1.3.3.5-1 至圖1.3.3.5-3 所示。圖 1.3.3.5-1 國道一號南下 48 公里處前期(95 年度)計畫試作結果 表 1.3.3.5-1 國道一號南下 48 公里處前期(95 年度)計畫試作分析 拍攝路段 國道一號南下48 公里處 拍攝日期 2006.6.28 拍攝時間 10:38 a.m.~10:39 a.m. 影片長度 1 分鐘 拍攝方向 反向 天候 陰天 交通狀況 塞車 車道數量 四線道 測試時間 1 分鐘 第1 車道準確率 100%(40/40) 第2 車道準確率 100%(34/34) 第3 車道準確率 92.31%(24/26) 第4 車道準確率 28.57%(10/35)
圖 1.3.3.5-2 國道一號南下 34 公里處前期(95 年度)計畫試作結果 表 1.3.3.5-2 國道一號南下 34 公里處前期(95 年度)計畫試作分析 拍攝路段 國道一號南下34 公里處 拍攝日期 2006.10.18 拍攝時間 11:42 a.m.~17:08 p.m. 影片長度 5 小時 26 分鐘 拍攝方向 正向 天候 晴天 交通狀況 順暢 車道數量 四線道 測試時間 10 分鐘 第1 車道準確率 88.89%(152/171)
圖 1.3.3.5-3 國道一號北上 66 公里處前期(95 年度)計畫試作結果 表 1.3.3.5-3 國道一號北上 66 公里處前期(95 年度)計畫試作分析 拍攝路段 國道1 號北上 66 公里處 拍攝日期 2006.6.28 拍攝時間 10:02 a.m.~10:03 a.m. 影片長度 1 分鐘 拍攝方向 正向 天候 晴天 交通狀況 順暢 車道數量 四線道 測試時間 1 分鐘 第1 車道準確率 100%(18/18) 第2 車道準確率 100%(16/16) 第3 車道準確率 100%(23/23) 第4 車道準確率 96.15%(25/26)
由圖1.3.3.5-1 至圖 1.3.3.5-3 可見,試作時段是白天,且車流 較順暢,車和車可以保持一定的車輛間距,因此得到不錯之準確 率,如表1.3.3.5-1 至表 1.3.3.5-3 所示。另由於國道一號 CCTV 架 設位置較高,因此可以看見車輛的範圍較廣,且視角較高,因此 前後車輛的交疊並不嚴重,在處理車流壅塞時會有較明顯的車輛 特徵可以切割車輛的彼此位置,然而,由於攝影機位置是架設在 車道的側方,所以每一車道會因為視角的不同,偵測的準確率也 會有不同的表現。整體而言,距離攝影機較遠的車道因為車輛視 覺面積相對較小,且受隔壁車道遮蔽較為嚴重,如果隔壁車道出 現大型車輛,小型車輛更有可能被完全遮蔽,因此,會比距離攝 影機較近的車道擁有較低的準確率。
1.4 本期計畫目標項目
一、 研發適合國內交通環境之車輛偵測器雛型 本期影像式車輛偵測器乃延續前期計畫之基本架構持續發展 及精進系統功能,但為使本期系統較前期系統更能適應環境的變 化及整體功能更為強健,在本期系統中加入新穎的背景更新概 念,使系統可以適應環境光線的變化,同時也解決系統在一般攝 影機功能上普遍存在的問題,如自動白平衡與自動電子快門。在 一般特殊環境變化下,攝影機會自動啟動上述二項功能,造成輸 入影像的顏色及亮度快速改變,而可能形成切割錯誤進而導致系 統辨識效能下降,但此次系統在加入背景更新概念後,將可有效 克服攝影機自動白平衡與自動電子快門的問題,提升系統辨識能有關影像式車輛偵測器結合CCTV 系統整合試作部份,持續 改善了前期計畫在CCTV 系統整合試作的成果,並且加強壅塞警 示功能,以雪山隧道為主要之測試路段。事件偵測部份則以異常 停止車輛、變換車道車輛與掉落物偵測等功能之開發為主。
1.5 文獻回顧
影像式車輛偵測的演算法主要分為背景相減、連續畫面相減與特 徵 辨 識 3 大 方 向 。 背 景 相 減 的 方 法 是 目 前 最 普 遍 的 使 用 方 式 [1][2][3][4][5][6],主要是因為利用在不同色彩空間 RGB[1]、HSI[7]、 與 YCbCr[8]的目前畫面與背景相減,當該像素的差值大於所設定的門 檻值,即為前景像素。接著利用一些影像處理的方法將破碎的像素合 併成為大型物件,然後再進行車輛的判定。Jodoin 等人[2]融合時間域 與空間域切割出的資訊進行車輛偵測。Tai 等人[3]使用修正統計的方式 來收斂背景,加快背景收斂的速度。Gao 等人[4]為了減低戶外光線變 化 對 背 景 的 影 像 , 使 用 卡 曼 濾 波 器 進 行 適 應 性 的 背 景 估 計 。M. Boninsegna 與 A. Bozzoli [5]利用卡曼濾波器去偵測是否有非預期的變 化,當發現有變化時,快速正確的更新所使用的參考影像(背景)。Huang 等人[8] 藉由分析連續的彩色影像,建構以影像為基礎的交通管理系 統,此研究提出的系統包含:背景擷取、車輛追蹤、背景更新及車輛 分類等。不同於 RGB 色彩空間,Huang 是採用 YCrCb 彩色空間來進 行前景切割。因為 Huang 所提出的方法運算複雜度較低,所以可以達 到即時處理並且適應亮度的變化。 除了使用背景相減的方法外,連續影像相減也是另外一種偵測方 式。連續影像相減主要的優點是不受光線變化影響與不用事先收斂背 景,利用前後張影像相減的差值大於所設定的門檻值,即可視為移動 輪廓。減出移動輪廓後再使用影像處理的方法判斷是否是車輛。Lipton 等人[9]使用連續影像的方法切割出移動物體,然後再將這些物體區分 為車輛、人與雜訊,因為使用連續畫面的緣故,當畫面中的車輛處於 緩慢移動或是靜止狀態時,系統較不易偵測出車輛。[10][11][12][13][14][15]的方法來偵測車輛。Wu 等人[10]使用小波係數 當作特徵來辨識車輛。Sun 等人[11]使用 Gabor 濾波器擷取出紋路特 徵,經過主要分量分析找出主要的特徵點後,輸入到支援向量機 (Support Vector Machine)做車輛的辨識,而 Bertozzi 等人[12]使用角點 (Corners)特徵來進行車輛偵測與驗證,Guo 等人[13]則使用好幾個在 La*b*色彩空間定義好的顏色區塊來偵測車輛顏色,當顏色落在所定義 的區塊內即視為是車輛的像素,但是因為這些區塊不夠緊實的關係並 且車輛顏色差異太大,導致容易將一些路面的顏色偵測為車輛像素而 發生錯誤偵測。Tsai 等人[14] 利用色彩與邊緣資訊進行彩色影像中之 車輛偵測。由於 Tsai 是在靜止影像上進行車輛偵測,因此相較於過去 採用移動資訊(Motion features)的方法,Tsai 提出一種新穎的色彩空間 轉換方法,快速地找出影像中屬於車輛顏色之像素點。因為如車輛具 有各種不同之顏色、戶外環境伴隨著季節與天候不同會有複雜的光線 變化等因素,導致極少論文以色彩資訊進行車輛偵測。但是 Tsai 採用 將畫面中的像素轉換到所提出的色彩空間,在這個色彩空間之下足以 在不同的光線條件下區分車輛與背景之像素點。同時又結合邊緣 (Edge) 、 角 點 ( corners ) 與 小 波 轉 換 之 係 數 , 建 構 一 多 重 維 度 (multi-channel)之車輛分類器,此分類器對輸入影像中可能之車輛像素 點作有效之確認,整體的偵測結果不錯,但是因為運算複雜度高,如 要進行色彩空間轉換與小波轉換,因此須較長之執行時間。Cheng 等 人[15] 利用單張靜態影像進行車輛偵測。不同於大部分使用影像資料 的車輛偵測研究,該研究嘗試以線段特徵為基礎的方法,在影像中進 行車輛待選區域的定位,再以對稱性特徵進行確認,達到在靜態單張 影像中偵測車輛的目的。 Tseng 等人[7]提出綜合背景、連續畫面相減與邊緣特徵的偵測方法
Chuang 等人[16] 提出一套適用於夜間的車輛偵測。「夜間車輛偵 測演算法」分成車道之間獨立運作與變換車道車輛群組 2 個部份。該 研究使用車尾燈的偵測,以減少前方車燈強烈炫光的影像。第一階段 有移動偵測、車輛追蹤與車種分類。「移動偵測」主要是依據夜間車輛 發光的部分與亮塊之間的特徵,如間距與角度等等,進行偵測,若某 一群亮塊穩定的前進,則將這些亮塊視為同一輛車所產生的亮塊,達 到車輛追蹤,接著利用所框出同一車之亮塊群的方框寬度轉換到實際 空間後進行車輛分類,為了降低誤判的情形,在這個研究中,使用變 換車道車輛群組,利用相同時間點將變換車道車輛的亮塊亦歸類為同 一車。 本期研究整合上述研究之概念,提出一個背景擷取、物件切割辨 認、及物件追蹤方法,以進行車輛偵測,詳細方法說明詳見如後。
1.6 研究方法概述
本期影像式車輛偵測器乃延續前期計畫之基本架構持續發展及精 進系統功能,但是為了更能適應環境的變化、整體功能更為強健及解 決因為一般攝影機功能上造成的自動白平衡與自動電子快門問題,本 研究利用快速更新的方式克服因為顏色及亮度快速改變造成的切割錯 誤,提升系統辨識能力。 本研究所提出之系統是由背景擷取、背景更新、物體辨識及物件 追蹤…等多項方法整合而成,車輛偵測系統處理的影像為 320×
240 像 素(pixel)的 24 位元全彩影像,車輛偵測系統流程如圖 1.5-1 所示,在此 次所提系統內之背景擷取部份,我們改採以漸近式背景分類收斂的方 法,由於在一連續影像中,相同位置的背景點其值變化很小甚至於不 變,在經過數張連續影像後,各背景點出現的次數相較於其他非背景 點的值會來得大,換句話說,背景點出現的機率相較於其它非背景點 會來得大,利用這個特性就可以得到正確的背景圖像。此法之優點除 可針對靜態背景有效且即時的擷取外,另影像之取得乃改採不同以往相互轉換時所漏失的重要辨識資訊,並突破過去僅以灰階影像做為背 景擷取的觀念。 圖1.5-1 車輛偵測系統流程圖 在移動物件切割部份,本次我們改以利用先進影像與背景影像顏 色的差異性做為物件切割的依據,但為了有效解決攝影機振動、風吹 樹葉所產生之搖晃雜訊及陰影影響…等干擾前景切割的因素,我們另 在系統中強化了原有的連通物件的形成及重建移動物體資訊的概念, 使物件切割更為完善,而在辨識部份則以光學幾何的原理,藉由地面 與影像平面對稱的原理推算量測移動物件外型及尺寸,達成辨識各式 車種的目的,另系統辨識的資訊也可用以作為系統後續運用發展。
第二章 系統硬體架構
2.1 硬體架構說明
本系統主要由三個硬體單元組成,分別是影像擷取單元、資料數 位化單元以及中央運算處理與演算核心單元,如圖2.1-1 所示。其中, 影像擷取單元採用 CCD 攝影機,資料數位化單元則是使用影像擷取 卡,中央運算處理單元則是使用電腦執行演算核心。 影像擷取單元 (CCD攝影機) 資料數位化單元 (影像擷取卡) 中央運算處理單元 (電腦) 演算核心 (軟體演算法) 交通參數資訊 (符合都市交通控制 通訊協定3.0版) 圖 2.1-1 硬體單元示意圖2.2 硬體組成
一、 CCD 攝影機 系統採用國內自行生產編號 KMS-63W3N 之 CCD 攝影機,如 圖 2.2-1,此一系列是目前所生產的最高級攝影機,採用雙倍曝光 技術和 16M 記憶體,攝影機首先使用如 1/100 秒的快門速度取得 1眼的 1000:1(人眼能同時看清門外 100,000 Lux 和門內 100 Lux 的影 像,這種情況常會發生於在室內通過一扇窗戶看外面明亮的風景 時),63W1 美洲豹系列具有 280:1 的超寬動態範圍,154dB 漏光排 斥比,優於傳統攝影機 90 倍(其他日本/臺灣/韓國製造商的傳統 攝影機一般只具有 3:1 的動態範圍和 95~110dB 的漏光排斥比), CCD 規格及優點請參閱表 2.2-1 及 2.2-2。 圖 2.2-1 KMS-63W3N-CCD 攝影機
表 2.2-1 KMS-63W3N-CCD 攝影機 型 號 KMS-63W3N 電 視 系 統 NTSC PAL 影 像 感 測 器 1/3 英寸 CCD 影像感測器 C C D 總 像 素 768(水平) X 494(垂直) 795(水平) X 596(垂直) 掃 描 系 統 525 掃描線,60 圖場 每/秒 625 掃描線,50 圖場 每/秒 同 步 系 統 內同步/Line-Lock 傳統模式 0.05 Lux (F1.2 5600°K 30IRE) 最低照度 星光模式 0.001 Lux (F1.2 5600°K 10IRE) 水平清晰度 600 線/580 線(數位信號強化處理) 模 式 ATW/AWC 可切換(無色滾動) 白 平 衡 範 圍 3200~10000°K 模 式 自動增益控制 ON/OFF 可切換 增益控制 範 圍 0~18dB 信 噪 比 52dB(最小)/70dB(最大)(自動增益控制關閉) 電 子 快 門 1/60~1/120,000 秒連續 1/50~1/120,000 秒連續 自 動 光 圈 自動電子快門/直流驅動 螢 幕 選 單 顯 示 所有控制選項均由螢幕選單顯示 5 鍵 關 閉 螢幕顯示控制面板 非 閃 爍 功 能 由螢幕選單選擇控制 背 光 補 償 功 能 由螢幕選單選擇控制 數位放大功能 X2 由螢幕選單選擇控制 鏡 像 功 能 由螢幕選單選擇控制 上 下 反 轉 功 能 由螢幕選單選擇控制 影 像 加 強 功 能 由螢幕選單選擇控制 負 片 功 能 由螢幕選單選擇控制 遮 蔽 區 域 由螢幕選單選擇控制 數 字 增 益 強 化 由螢幕選單選擇控制 超 寬 動 態 範 圍 52dB(280:1) 視 訊 輸 出 複合式影像信號輸出,1.0V P-P at 75ohm 伽 瑪 修 正 0.45 工 作 環 境 溫 度 -20°C 到 50°C 工 作 環 境 濕 度 85%RH 以下 電 源 DC12V ± 1V/120Ma 灰 階 校 正 0.45/1.0 由螢幕選單控制
表2.2-2 KMS-63W3N-CCD 攝影機優點 KMS-63W3N-CCD優點 超 寬 動 態 範 圍 280:l 動態範圍(優於傳統攝影機 90 倍) 超 高 漏 光 排 斥 比 154db 漏光排斥比(優於傳統攝影機 50~100 倍) 數 位 放 大 調整從1 倍到 2 倍的 32 級放大範圍,或者 2 倍到 256 倍的特殊要求。 4 區 域 遮 罩 通過遮蔽螢幕的部分區域保護他人的隱私。 4 8 區 背 光 補 償 48 小區域, 320X240 智慧微型區域。 數 位 自 動 增 益 控 制 沒有雜訊提高 12dB 的感光度。 螢 幕 功 能 表 顯 示 互動功能表控制多數功能。 電 源 直流 12V ± 10V/120mA 超低功耗。
二、 鏡頭 系統採用 8mm 固定焦距鏡頭,相關規格資訊如表 2.2-3、圖 2.2-2 所示。 圖 2.2-2 8mm 鏡頭 表 2.2-3 8mm 鏡頭規格 型號 CCTV LENS 06 影像格式 1/3 inch 焦距 8mm 最大孔徑 F1.2 孔徑範圍 F1.2-C 最小物件距離 0.1m(W) 1.0m(W)
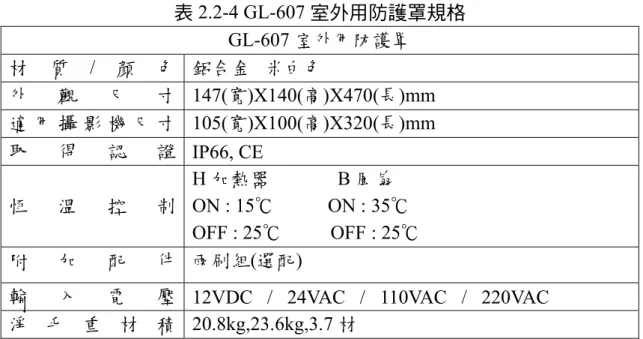
三、 CCD 防護裝置 系統為使 CCD 攝影機可於各種天候下操作及維護使用年限, 於 CCD 攝影機外配備 GL-607 室外用防護罩如圖 2.2-3,此型防護 外罩計由外罩、風扇、加熱器、雨刷組成,其規格如表 2.2-4。 (a) (b) (c) (d) (e) (f) (a)防護外罩;(b)加熱器;(c)風扇;(d)、(e) 電源控單元;(f)雨刷組 圖 2.2-3 GL-607 室外用防護罩
表 2.2-4 GL-607 室外用防護罩規格 GL-607 室外用防護罩 材 質 / 顏 色 鋁合金 米白色 外 觀 尺 寸 147(寬)X140(高)X470(長)mm 適 用 攝 影 機 尺 寸 105(寬)X100(高)X320(長)mm 取 得 認 證 IP66, CE 恆 溫 控 制 H 加熱器 B 風扇 ON : 15℃ ON : 35℃ OFF : 25℃ OFF : 25℃ 附 加 配 件 雨刷組(選配)
輸 入 電 壓 12VDC / 24VAC / 110VAC / 220VAC
淨 毛 重 材 積 20.8kg,23.6kg,3.7 材 四、 電腦 為 適 應 現 地 狹 小 空 間 及 攜 行 方 便 之 考 量 , 系 統 採 用 微 星 MS6404 準系統電腦如圖 2.2-4,作為現地演算進行及資料儲存之 平臺,經過長時間的實驗與連續運轉測試,並無不穩或是當機現 象,其規格如下: 型號名稱 : MS-6404 中央處理器: Intel Pentium 940 3.2GH 硬碟: Seagate 200G/8MB/7200RPM/S-ATA 記憶體 : TwinMOS 512MB PC2-4200*2 電源供應器 : 260W(PFC) 尺寸: 210(寬)x330(長)175(高)mm
(a) (b) (c) (d) (e) (f) (g) (h) (a)~(d)為準系統外觀;(e)準系統內部;(f)~(g)準系統中央處理器及扇熱風 扇;(h)外接影像擷取卡 圖2.2-4 微星 MS6404 準系統電腦
五、 影像擷取卡 系統採用淩華科技生產高速影像擷取卡(ADLink - RTV24), 如圖 2.2-5 所示,規格如下: 四阜平行運算彩色影像數位取樣器 最快每秒擷取 120 張 32 位元彩色影像,並以頻率 33/66MHz PCI 匯 流排傳送
支援彩色(PAL / NTSC), 單色 (CCIR / EIA) 攝影機 最多支援 16 阜影像輸入 基版式 TTL 輸入/輸出 線路 內建看門狗計數器 提供安全考量為設計之保護電路 圖 2.2-5 ADLink - RTV24 高速影像擷取卡 六、 ADSL 網路數據機
統則直接藉由本所網路,達成遠端監控及數據資料傳送。
表2.2-5 康全 CT-511C 規格
Chipset AD 6489 + Eagle
SDRAM 8 MB
WAN Interface (One ADSL port)
ADSL standard ANSI T1.413 Issue 2, ITU-T G.992.1, ITU-T G.992.2
Downstream: 11 Mbps G.DMT data rate
Upstream : 1 Mbps Downstream: 1.5 Mbps G.lite data rate
Upstream : 512 Kbps ATM Attributes
PPP over AAL5 RFC-2364 Multi-protocol over AAL5 routed RFC-2684 Multi-protocol over AAL5 bridged RFC-2684
PPPoE RFC-2516 IPOA RFC-1577 VCs 8
AAL type AAL5
ATM service class UBR/CBR/VBR ATM UNI support UNI3.1/4.0, ILMI
OAM F4/F5 Yes Management Console port RS232/DB9 SNMP Yes RFC-1213 MIB II Yes Telnet Yes Web-based management Yes
CT-500C: Power, Alert, LAN Link, ADSL Link, ADSL Tx/Rx
LED Indicators CT-500S: Power, Alert, LAN Link, ADSL Link, ADSL Act
Local interface (One Ethernet port)
Standard IEEE 802.3/IEEE 802.3u 10/100 Base-T Transparent bridge and learning Yes
Routing functions
IP static route Yes RIP and RIPv2 Yes Network functions
ARP Yes DNS, NAT/PAT, DHCP/BOOTP Yes
PAP, CHAP Yes
IGMP proxy Yes
Power Supply
External power adapter 110 VAC or 220 VAC Environmental Conditions
Operating temperature 0~50degrees Celsius(operating) Relative humidity 5~90% (non-condensing) Dimensions
CT-500C: 200 mm (W) x 44 mm (H) x 137 mm (D)
CT-500S: 40 mm(W) x 140 mm (H) x 133 mm (D) (with cab. Holder) Weight
圖2.2-6 ADSL 數據機(康全 CT-511C) 七、 攝影機支架 系統分別於新竹市東西向快速公路台 68 線南寮-竹東段武陵 交流道口及臺北市敦化北路交通運研所前設置 L 型鋼架及門型鋼 架各一座,其基礎混凝土強度為210kg/cm2,以 ASTM 材質為主, 如圖2.2-7。
(a)
(b)
(a)門型鋼架規格;(b)現地門型鋼架
八、 控制箱
系統位於新竹市東西向快速公路台 68 線南寮-竹東段武陵交
流道口採用43.5x38.5 訊號控制箱,其規格如圖 2.2-8,另位臺北市
敦化北路交通運研所之系統則設置於本所6 樓實驗室。
(d) (a) 43.5x38.5 訊號控制箱規格;(b)~(c) 43.5x38.5 訊號控制箱外觀; (d) 43.5x38.5 訊號控制箱外觀內部 圖 2.2-8 43.5x38.5 訊號控制箱
2.3 實驗地點架設
本期研究鑑於系統未來推展運用之考量,除續於前期所建置中華 路五段及東西向快速公路武陵交流道口進行實測外,另於臺北市交通 部運輸研究所前進行系統偵測能力之測試,以適應複雜之車流運行情 形,使所研發系統同時適用市區道路及高快速公路之運用,有關中華 路及快速公路地理環境特性請參閱前期報告及前期計畫執行概況,以 下就本期新增運研所前測試點之地理環境特性及建置經過加以說明。此一設置點位於臺北市松山區敦化北路240 號交通部運輸研究所 (N 25°06'01",E 121°54'97")大樓右前方(面向大樓)車行道入口,距民 權東路、敦化北路及松山機場出口交匯口以南120 公尺處,攝影機監 控畫面為敦化北路南向慢速車道,車道混行機(踏)車、小型車、大客車 及少量的大貨車,設置點車流來自松山機場進出旅客車輛、中山高速 公路南、北行進入市區車輛及內湖科學園區進入機場及市政中心之車 輛,為連繫機場、科學園區及高速公路之重要樞紐,尖峰時段會呈現 壅塞停滯現象,相關設置點位置如圖2.3-1~圖 2.3-3 空照示意圖及圖 2.3-4 車道示意圖所示,該實驗路段的道路特性說明如下: 1. 設置點以北為松山機場及空軍松山指揮部,民用航空公司班機每日 上午0600~下午 2200 均為客機起降時間。 2. 設置點以南為住、商用地,現除少數住宅外、大部份為五星級飯店、 醫院及各大行企業總部,商業活動熱絡。 3. 設置點以西及以東均為聯繫內湖科學園區、中山高速公路及各捷運 系統,交通繁忙。 4. 攝影機所拍攝之敦化北路區段,其路面寛約 10 公尺、單向 2 線混 合車道,車道左側以中央分隔道區隔快速車道及公車專用車道,右 側為運研所車行道入口,每一車道寬均約3.3 公尺,並有約 2~3 公 尺的路肩,及約3~4 公尺的人行道。
交通部運輸研究所 (N 25°06'01",E 121°54'97" ) 交通部運輸研究所 (N 25°06'01",E 121°54'97" ) 圖 2.3-1 交通部運輸研究所空照圖 圖2.3-2 交通部運輸研究所空照示意圖
交通部運輸研究所 (N 25°06'01",E 121°54'97" ) 交通部運輸研究所 (N 25°06'01",E 121°54'97" ) 圖2.3-3 交通部運輸研究所空照示意圖 3.3公尺 3.3公尺 2.9公尺 6公尺 4公尺 3.3公尺 3.3公尺 2.9公尺 6公尺 4公尺