國
立
交
通
大
學
機械工程學系
碩
士
論
文
使用單軸、雙軸控制輸入之振動式陀螺儀系統
MEMS gyroscope system using single-axis/dual-axis control input
研 究 生:李嘉緯
指導教授:陳宗麟 博士
使用單軸、雙軸控制輸入之振動式陀螺儀系統
MEMS gyroscope system using single-axis/dual-axis control input
研 究 生:李嘉緯
Student:Chia-Wei Lee
指導教授:陳宗麟
Advisor:Tsung-Lin Chen
國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
A ThesisSubmitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Mechanical Engineering
October 2010
Hsinchu, Taiwan, Republic of China
使用單軸、雙軸控制輸入之振動式陀螺儀系統
學生:李嘉緯
指導教授:陳宗麟
國立交通大學機械工程學系(研究所)碩士班
摘 要
本文中的機械結構瑕疵包含:因製造過程造成的機械結構尺寸的誤差(不確定性)、 因結構設計造成的陀螺儀動態的非理想性。本文中的感測介面與感測電路瑕疵包含:因 光罩擺放所造成的誤差、運算放大器的電壓偏移量(offset voltage, V )os 、因導線產生的 寄生電容(CP)。本文的做法是將機械結構、感測介面的瑕疵與感測電路非理想效應所 造成的影響整理成為未知的系統參數包括:系統質量、剛性係數、阻尼係數、訊號比例常 數(scale factor)、訊號偏壓飄移量(signal drifts)。本文主要分為兩部分,一是沒有考慮感測電路的情況下,設計一狀態觀察器,並於 單軸(驅動軸)輸入兩頻率的訊號或是兩頻率以上的訊號,以訊號處理的方式(軟體) 來估測出陀螺儀動態與系統未知參數及待量測的角速度。因此,不需要兩軸控制輸入, 不需要事先知道陀螺儀質量塊的重量。預計可大幅降低微機電陀螺儀的製造成本與技術 門檻,進而使得微機電陀螺儀可廣泛應用於各式電子產品。二是考慮感測電路且具有電 路瑕疵的情況下,設計一狀態觀察器,於兩軸給予控制輸入,以訊號處理的方式來估測 出陀螺儀動態與系統未知參數(包含訊號比例常數、訊號偏壓飄移量)及待量測的角速 度,並補償其為理想陀螺儀動態系統,進而無須透過積分運算,直接估測待測物的角度。
MEMS gyroscope system using single-axis/dual-axis control input
student:
Chia-Wei
Lee Advisor:
Dr.
Tsung-Lin
Chen
Department﹙Institute﹚of Mechanical Engineering
National Chiao Tung University
ABSTRACT
The mechanical structure imperfections and circuit imperfections greatly affect the performance of a gyroscope system. Normally this problem is lessened by physically tooling the hardware structures, for example, expensive fabrication facilities, post-fabrication processes, and complicated circuit designs. The disadvantages of doing so are costly. Recently, more and more research proposed using control methods (software approaches) to compensate the effect resulting from those imperfections and obtain correct angular rates because they can be very cost effective. However, those approaches often require a gyroscope system equipped with dual-axis control inputs and the mass of the proof mass must be known beforehand. The existing commercial gyroscopes only equips with single axis control input. Thus, those existing compensation methods can not apply.
This paper consists two parts. The first one uses single-axis control input to compensate the errors resulting from structure imperfections. This is done by (1) employing a gyroscope design with cross-axis resilient force and/ or cross-axis damping force to compensate imperfections from structure designs and circuit errors. The second one uses two-axis control inputs to compensate imperfections, furthermore, it compensates the undesired gyroscope dynamics so that the compensated gyroscope dynamics can be used to estimate rotation angles directly without integrating the measured angular rates.
誌 謝
首先,我想要謝謝我的指導教授陳宗麟老師,在碩士班兩年的時間裡,帶領著我邁 向「研究」這條道路,並引導我用嚴謹的態度做研究,在我一度懈怠的時刻提醒著我、 給予我鼓勵,在面對茫然未來的時候,以過來人的身分給予我建議,讓我有著充實且明 確的研究與生活。此外,要感謝我的父母親,因為有他們的支持與鼓勵才得以讓我能夠 安心的去完成我想要的生活,面對問題的時候,也能夠提供我不同於我的觀點和想法。 感謝紀建宇學長給予我許多研究上的建議,讓我能夠釐清研究上的認知;並帶領著我體 驗各種不同的興趣,讓我的人生更加充實且美滿。最後感謝實驗室裡的夥伴們,與你們 共同討論、嘻笑打鬧,讓我有著許多美好的回憶目 錄
摘要 ... i ABSTRACT ... ii 誌謝 ... iii 目錄 ... iv 圖目錄 ... vi 表目錄 ... vii 第一章 緒論 ... 1 1.1 研究動機 ... 3 1.2 文獻回顧 ... 4 1.3 預期貢獻 ... 5 1.4 論文架構 ... 6 第二章 微機電陀螺儀系統簡介 ... 7 2.1 微機電陀螺儀系統簡介 ... 7 2.2 微機電陀螺儀系統模型 ... 9 2.3 感測電路模型 ... 11 2.3.1 理想感測介面搭配感測電路 ... 14 2.3.2 具瑕疵感測介面搭配感測電路 ... 17 2.4 模型建構 ... 19 第三章 單軸控制輸入微機電振動式陀螺儀系統 ... 22 3.1 觀察器設計 ... 22 3.2 控制輸入 ... 27 3.3 數值模擬結果 ... 28 3.3.1 角速度為定值 ... 28 3.3.2 角速度隨時間變動 ... 29 3.3.3 觀察性矩陣奇異值 ... 30 3.4 討論 ... 31 第四章 雙軸控制輸入微機電振動式陀螺儀系統 ... 33 4.1 代數變換 ... 34 4.2 觀察器設計 ... 36 4.3 控制輸入 ... 404.4 數值模擬結果 ... 42 4.4.1 比例常數與飄移量皆為固定值 ... 42 4.4.2 比例常數為固定值、飄移量隨時間變化(0.1Hz) ... 43 4.4.3 比例常數與飄移量皆隨時間變化(0.1Hz) ... 44 4.4.4 比例常數與飄移量皆為定值,初始值為零 ... 45 4.4.5 比例常數與飄移量皆為定值,初始值為零,兩軸輸入頻率不同 .. 46 4.4.6 觀察性矩陣奇異值 ... 47 4.5 討論 ... 48 第五章 結論與未來計畫 ... 51 5.1 結論 ... 51 5.2 未來計畫 ... 52 參考文獻 ... 53 附錄一 數值模擬用參數 ... 55
圖 目 錄
圖 1-1 MEMS 市場規模預估 (來源:iSuppli) ... 2 圖 1-2 手機用陀螺儀出貨量預估(來源:iSuppli, EE Times, 2010/06) ... 3 圖 1-3 商品化微機電陀螺儀系統示意圖 ... 4 圖 1-4 傳統模式下的質量塊運動方式 ... 5 圖 2-1 典型機械模型(科氏力效應) ... 9 圖 2-2 單軸振動式陀螺儀示意圖 ... 9 圖 2-3 梳狀結構感測方式 ... 12 圖 2-4 梳狀結構斜視圖 ... 13 圖 2-5 感測電路 ... 14 圖 2-6 電容耦合描述模型 ... 14 圖 2-7 理想梳狀感測電路示意圖 ... 15 圖 2-8 非理想梳狀感測電路示意圖 ... 17 圖 3-1 狀態觀察器概念圖 ... 22 圖 3-2 分別輸入 8Hz、20Hz 與同時輸入 8Hz、20Hz 訊號之比較 ... 27 圖 3-3 系統動態估測模擬,單軸輸入兩頻率 ... 28 圖 3-4 系統參數為定值的估測模擬,單軸輸入兩頻率 ... 29 圖 3-5 系統動態估測模擬,單軸輸入兩頻率(角速度隨時間變動) ... 29 圖 3-6 系統參數的估測模擬,單軸輸入兩頻率(角速度隨時間變動) ... 30 圖 3-7 觀察性矩陣奇異值與秩數(Case3.3.1) ... 30 圖 3-8 觀察性矩陣奇異值與秩數(Case3.3.2) ... 31 圖 4-1 方塊流程圖 ... 33 圖 4-2 系統動態估測模擬 ... 42 圖 4-3 系統參數估測模擬 ... 43 圖 4-4 系統動態估測模擬 ... 43 圖 4-5 系統參數估測模擬 ... 44 圖 4-6 系統動態估測模擬 ... 44 圖 4-7 系統參數估測模擬 ... 45 圖 4-8 系統動態估測模擬 ... 45 圖 4-9 系統參數估測模擬 ... 46 圖 4-10 系統動態估測模擬 ... 46 圖 4-11 系統參數估測模擬 ... 47 圖 4-12 觀察性矩陣奇異值(左 Case4.4.1,右 Case4.4.2) ... 47 圖 4-13 觀察性矩陣奇異值(左 Case4.4.3,右 Case4.4.4) ... 48表 目 錄
表 1 陀螺儀等級分類表 ... 8 表 2 感測介面參數 ... 19 表 3 穩態時估測相對精確度 ... 31 表 4 穩態時估測相對精確度( ( )α t 、 ( )β t 、ηx( )t 、ηy( )t 為隨時間變化 0.1Hz) ... 48 表 5 感測電路參數 ... 55 表 6 數值模擬用參數 ... 55第一章 緒論
陀螺儀是普遍用來測量角速度的慣性感測器,它被應用在許多領域,例如:定位、 導航、控制穩定等。雖然轉輪式、光纖式、環型雷射式的陀螺儀已經廣泛的被應用,由 於體積的龐大、成本的昂貴以至於不易被應用在新興的產品上。 近 年 來 微 機 械 技 術 的 蓬 勃 發 展 , 使 得 設 計 與 製 作 微 機 電 式 陀 螺 儀 (MEMS Gyroscopes)的門檻降低。這些微機電式陀螺儀的尺寸較傳統機械式陀螺儀小得多,而且 可以大量的重複製造,因而降低製作的成本。這些新興的微機電式陀螺儀開創新的市場 機會而且被應用在需要低成本的領域上,例如:遊戲元件、3D 滑鼠、攝錄機影像穩定 系統等電子產品,翻覆偵測、騎乘穩定系統、導航系統等車輛產品,以及慣性導航感測 等。 從 1990 年代末期到 2006 年為止,電玩微機電市場的成長幅度就不大。然而,當 Nintendo 的 Wii 問市後,市場了解到微機電動作感知器能夠增進遊戲經驗。到 2006 年 終時,微機電感知器就裝置於 PS3 主機上。三大遊戲主機中,有兩部皆搭載微機電系 統,使其市場蓬勃發展。儘管整體電子產業下滑,但是微機電市場在 2008 年開始加速 成長,這是由於手機對於加速度計的需求發展故。新手機搭載加速度計的在 2008 年來 到 10%,2007 年時此數據為 3%。根據市場研究機構 The Information Network 預估,到 2012 年全球 MEMS 應用市場規模將達 154 億美元,其中 MEMS 消費電子應用規模可成 長至 71 億美元。iSuppli 的報告則指出,手機將會是 MEMS 下一階段最具潛力的應用市 場,預期規模可以超越電腦週邊商品和汽車感測領域,到了 2012 年 MEMS 在手機領域 應用的規模將達 8.6 億美元,此數字約是 2007 年 3.048 億美元的三倍,出貨量可以達到 2 億顆。圖 1-1 MEMS 市場規模預估 (來源:iSuppli) 到了 2010 年,微機電陀螺儀開始被應用在智慧型手機上,這將會帶給微機電陀螺 儀激勵性的成長。iSuppli 指出,在 2009 年手機內建陀螺儀出貨量為零,今年(2010 年) 可成長到 2600 萬支,預估到 2014 年會有 2.85 億支手機具備微機電陀螺儀晶片。 過去手機內建加速度計做為運動感知器,其缺點在於無法區分動作或重力所造成的 運動,但是加上了陀螺儀就能立即感應動作的發生,讓使用者介面更靈敏,也不受殘影 (artifacts)干擾,藉此提升手機動作控制和遊戲動作感測的精確度。在互動式遊戲應用領 域,加速度計對於翻轉功能的感測不佳,加裝具備角速度感測能力的微機電陀螺儀,可 明顯提升角度感測的能力,使得互動式遊戲的體驗更加豐富。 Gyroscopes Oscillators
Switches, Tunable Capacitors Microfuel Cells
Displays Accelerometers Microphones FBAR Filters
圖 1-2 手機用陀螺儀出貨量預估(來源:iSuppli, EE Times, 2010/06)
1.1 研究動機
過去十幾年,微機電陀螺儀的設計與製作的研究大量的被提出,[1] 廣泛的回顧, 過去發展提高品質與符合成本效益的微機電式陀螺儀的研究。微機電式陀螺儀是平板式 的機械振動結構製作在多晶矽或是矽晶圓上,一般的製作步驟包含了體加工(bulk micromachine)、晶圓接合(wafer bonding)、面加工(surface micromachine)、高深寬比加工 (high aspect ratio micromachine)。每一個加工步驟都包含了多個製作程序,如:沉積 (deposition)、蝕刻(etching)、微影(lithography)。實際上,在每一個製作程序都可能有缺 陷 產 生 , 因 此 , 無 論 是 何 種 製 造 技 術 , 都 不 可 避 免 的 在 結 構 上 產 生 一 些 缺 陷 (imperfections),這些缺陷會造成機械結構的不對稱及結構尺寸的不確定性。此一現象在 微機械系統中特別顯著,因其機械結構小,製程所造成的尺寸誤差可達將近 15%,使得 系統響應不同於預期,再者,因微機電元件的微小化,減少了微機電系統對缺陷的容忍 度(torelance),造成缺陷對微機電系統的影響特別顯著。 為了提高振動式陀螺儀的性能,先前技術大多使用昂貴、複雜的製程或「後製程」 (post-processes),來修改機械結構本體,以減少機械結構中的瑕疵所造成的影響,此舉 的缺點是製程技術門檻高,價格昂貴,也有少部分以控制法則(軟體)來補償因機械結 百 萬 支 手 機
構瑕疵所造成的影響。大都需要雙軸控制輸入,且陀螺儀系統的質量塊的重量必須事先 知道,雙軸控制輸入的微機械陀螺儀設計較複雜,且需要兩套輸入電路,成本較高。 目前商品化的微機電陀螺儀(如圖 1-3)大多是單軸控制輸入,因此利用雙軸控制輸 入來補償機械結構瑕疵的方式無法使用。 感測介面與感測電路的非理想效應會影響訊號輸出電壓與預期有所落差,其中包 括,製作感測介面時產生的瑕疵,感測電路中的寄生電容、電壓偏移,雜訊等非理想效 應,期許能將機械結構瑕疵、感測介面瑕疵和感測電路的非理想效應整合在同一個系統 動態模型中,將這些缺陷造成的非理想效應視為系統的未知參數,將這些未知參數與系 統動態一起估測,並獲得正確的角速度,或是將系統補償成理想的陀螺儀動態系統來做 直接角度的量測用。 Monitor Amp. AGC Drive Amp. Pre. Amp. LPF Amp. Vout Drive Sense Monitor Amp. AGC Drive Amp. Pre. Amp. LPF Amp. Vout Monitor Amp. AGC Drive Amp. Pre. Amp. LPF Amp. Vout Drive Sense 圖 1-3 商品化微機電陀螺儀系統示意圖
1.2 文獻回顧
從 1990 年起,許多控制方法被提出來改善振動式陀螺儀的性能。傳統的機械補償 花費大量時間與金錢來消除機械結構上的瑕疵,回授控制法[2]首先提出來補償振動式陀螺儀在製作上所產生的缺陷。適應性控制和能量控制法首先在[3]中描述,藉由參數估測 的方式來補償瑕疵。大多數的微機電式陀螺儀是以力平衡法(force-balancing method)來操 作的[4]-[6],使質量塊沿著驅動軸運動,當以角速度Ω 開始旋轉,沿著感測軸的方向給 予一反向的作用力,使得感測軸的運動軌跡很小,而此反向作用力與科氏力有著正比的 關係,如圖 1-4。只有少數的方法[7]是以適應性控制來處理微機電式陀螺儀的振動,使 質量塊在兩軸上的振幅相同。在[4]、[8]震盪控制器被設計用來使得驅動軸振動在共振 頻率上。基於里奧普諾夫(Lyapunov)的方法[5][6]被同時用在驅動軸與感測軸上,藉由估 測的方式得到角速度。除此之外,[9][10]考慮了時變的角速度然後做估測。適應性控制 器的設計在[9]中,是測量微機電陀螺儀輸出的位置與速度。控制器的設計在[10]中是基 於 兩 軸 間 沒 有 耦 合 存 在 的 假 設 。 控 制 器 在[11]中 , 藉 由 主 動 抗 干 擾 控 制 器 (Active Disturbance Rejection Control, ADRC)來處理不確定性和時變的參數。
圖 1-4 傳統模式下的質量塊運動方式
1.3 預期貢獻
將機械結構瑕疵、感測介面瑕疵和感測電路的非理想效應整合在同一個系統動態模 型中,將這些缺陷造成的非理想效應視為系統的未知參數,主要分為兩部份,其一是於 驅動軸輸入一兩頻率的訊號將此未知參數與系統動態一起估測,並獲得正確的角速度。 以控制技術來補償微機械陀螺儀因機械結構所產生的誤差,預期可降低微機械陀螺儀的 製作成本與技術門檻,亦可應用在現有商品化的微機電陀螺儀。可應用在具單軸控制輸入的商品化的微機電陀螺儀上,不需要精密的製程,不需要 具有雙軸控制輸入的陀螺儀設計。僅由後端的訊號演算處理,即可補償機械結構瑕疵, 提高微機電陀螺儀精度,成本可望大幅降低。 二是,以訊號處理的方式來估測出陀螺儀動態與系統未知參數(包含比例常數、偏 壓飄移量)及待量測的角速度,或是選用控制輸入將系統補償成理想的陀螺儀動態系統 來做直接角度的量測用。
1.4 論文架構
以下是本文組織架構: 在第一章,介紹研究動機並回顧過去與微機電陀螺儀系統相關的控制方法。 在第二章,提出微機電陀螺儀系統模型,並搭配梳狀結構之感測介面與後端放大電 路,並考慮感測介面瑕疵與放大電路的非理想因素,將其整合在所提出的系統模型中。 在第三章,對單軸控制輸入的微機電陀螺儀系統模型建立一個狀態觀察器,作穩定 性分析,選擇單軸輸入兩頻率的訊號的控制輸入。 在第四章,對雙軸控制輸入的微機電陀螺儀系統模型建立一個狀態觀察器,並考慮 感測介面與放大電路的非理想因素,選用控制輸入將其補償,且計算出陀螺儀旋轉角度。 在第五章,總結以上討論。第二章 微機電陀螺儀系統簡介
在本章節中,從微機電陀螺儀的動態用動力學推導的方式,得出微機電陀螺儀的動 態方程式,緊接著探討機械結構上的瑕疵對於陀螺儀運動軌跡的影響,最後提出以狀態 空間形式的模型來表示陀螺儀之動態方程式,此狀態空間形式的模型有助於接下來觀察 器的設計。2.1 微機電陀螺儀系統簡介
從過去的發展得知,各式不同設計的微機電陀螺儀可以藉由不同的效應來得到角速 度的資訊,例如:科氏力效應(coriolis effect)、懸浮效應(levitation effect)、桑克效應(sagnac effect)、核磁共振(nuclear magnetic resonance)等。無論是藉由何種效應來設計的微機電 陀螺儀,皆是為了得到更精確的角速度資訊,或是符合當時需求的設計,其中利用科氏 力效應來設計的微機電陀螺儀為最常見的。透過解析度(resolution)、比例常數(scale factor)、零率輸出(zero-rate output, ZRO)和 偏壓飄移(bias drift)等因子來評估微機電陀螺儀的效能,根據陀螺儀的性能區分為三大 類:慣性等級(inertial grade)、作戰等級(tactical grade)和速率等級(rate grade)。表 1 列出 了各等級的要求條件[12]。
Parameters Rate grade Tactical grade Inertial grade
Angle random walk (o/ h) >0.5 0.5-0.05 <0.001
Bias drift (o/h) 10-1000 0.1-10 <0.01
Scale factor accuracy (%) 0.1-1 0.01-0.1 <0.001
Full scale range (o/s) 50-1000 >500 >400
Max shock in 1s,g’s 103 103-104 103
Bandwidth (Hz) >70 ~100 ~100
表 1 陀螺儀等級分類表
圖 2-1 為基於科氏力效應設計的微機電陀螺儀的典型機械模型,中間的質量塊(proof mass)分別在 x、y 軸上,以彈簧連接至固定框架,假設 x 軸為驅動方向,y 軸為感測方 向, ) sin( t A x= x ωx 其中A 為振幅、x ωx為驅動頻率。 當陀螺儀受到一個角速度Ωz而開始旋轉,會沿著 y 軸方向產生一個科氏加速度。 ) cos( 2 2 v A t ay = Ω× = Ω xωx ωx 因此,可以藉由量測 y 軸的位移或速度來得到角速度的資訊。
圖 2-1 典型機械模型(科氏力效應)
2.2 微機電陀螺儀系統模型
微機電的振動式陀螺儀,為一種平板式結構,如圖 2-2,中間的質量塊分別在 x、y 軸上,以彈簧連接至固定框架,在實際的製程中,此示意彈簧常以彎延結構(serpentine) 實現,在實際應用中,常以一軸為驅動端,另一軸為感測端。今若以 x 軸為驅動端,我 們輸入電壓,使質量塊延著 x 軸,做等振幅同頻率的振動,若陀螺儀開始旋轉,會產生 科氏力,其大小正比於質量塊在驅動軸上振動的速度和角速度,而且科氏力會使質量塊 在 y 軸上產生振動,此時,對 y 軸上的訊號做解調,可以得到一個訊號與角速度成正比 關係。 圖 2-2 單軸振動式陀螺儀示意圖一般單軸感測振動式陀螺儀會將質量塊的動態侷限在一平面上,質量塊的動態被限 制在 x-y 平面上,而僅量測 z 軸方向的角速度。如此設計下,兩軸的動態可以用動力學 推導如下:
(
)
(
)
(
k m)
y m(
)
x u m x y d y m ma y m u y m x m k x d x m ma z y z y x z x y z x z y x z y x & & & && & & & && Ω − = Ω + Ω Ω + Ω + Ω − + + + Ω + = Ω − Ω Ω + Ω + Ω − + + + 2 ) ( 2 ) ( 2 2 2 2 2 2 1 1 一般線性加速度可以藉由設計或補償而消除,則上式的ma 與x may可以被忽略。此 外,假設在有限的操作區間內角速度為定值,式(1)可以簡化成以下:(
)
(
k m)
y m x u m x y d y m y m u y m x m k x d x m z y y x z x z x y x z y & & && & & && Ω − = Ω Ω + Ω + Ω − + + Ω + = Ω Ω + Ω + Ω − + + 2 ) ( 2 ) ( 2 2 2 2 2 2 1 1 其中柯氏效應所引起的慣性力為2mΩzx&與2mΩzy&,由此可以發現,較大的質量或 線性速度將使上述兩項慣性力有較大的輸出,而角速度Ω 的量測精確度就可以更高。z 不過,微機電系統最大的特色就是微小化,造成該質量一般只有約10−6 ~10−10kg的數量 級。這也是微機電陀螺儀不容易有高精確度的原因之一。此外,振動式微機電陀螺儀通 常操作在幾千至幾萬赫茲的振動頻率上,因此角速度相乘項通常遠小於振動頻率而可以 被忽略(此微小影響又可以被視為參數的微小擾動,若控制法則具有強健性,系統將不 受此擾動影響),因此(2)可以再次簡化成更簡單的形式: x m u y k y d y m y m u x k x d x m z y z x & & && & & && Ω − = + + Ω + = + + 2 2 2 2 1 1 即為一般單軸角速度感測振動式陀螺儀的系統動態,由上式我們可以觀察到,理想 上,僅有Ω 會造成兩軸的動態耦合(Dynamic coupling),換句話說,兩軸的振動除了角z 速度發生以外,將僅受各自的結構特性影響。因此,理論上將可藉由動態的改變來求得 角速度的大小。 理想上僅有Ω 會造成兩軸的動態耦合。然而,無論是何種製造技術,都不可避免z 的在結構上產生一些缺陷(imperfections),這些缺陷會造成機械結構的不對稱及結構尺寸的不確定性。此一現象在微機械系統中特別顯著,因其機械結構小,製程所造成的尺 寸誤差可達將近 15%,嚴重影響系統的動態響應。機械結構的不對稱性將造成兩軸動態 耦合,為模擬此一效應,可以改寫成: 2 2 xx xy xx xy x z xy yy xy yy y z mx D x D y K x K y u m y my D x D y K x K y u m x + + + + = + Ω + + + + = − Ω
&& & & &
&& & & &
其中m為質量塊的質量;d 、xx d 為yy x與 y 方向的阻尼係數;k 、xx k 為yy x與 y 方 向的剛性係數;dxy與kxy即為跨軸(cross-axis)的阻尼與剛性係數,用以描述跨軸的彈 性力及阻尼力。可以對上式進行歸一化(normalization),而獲得下式: 2 2 x xx xy xx xy z y xy yy xy yy z u x d x d y k x k y y m u y d x d y k x k y x m + + + + = + Ω + + + + = − Ω
&& & & &
&& & & &
其中 xx xx D d m ← ; yy yy D d m ← ; xy xy D d m ← ; xx xx K k m ← ; yy yy K k m ← ; xy xy K k m ← 。 由於機械結構瑕疵的影響,上述的系統參數皆可能不同於設計值。因此,在考慮機 械結構瑕疵的情形下(包含角速度),此系統共有八個未知參數,即k 、xx k 、yy k 、xy d 、xx yy d 、d 、xy Ω 、z m。
2.3 感測電路模型
由前述陀螺儀系統動態,當陀螺儀開始旋轉會產生科氏力,使得質量塊沿著另一軸 產生振動,造成質量塊的位移,此位移與角速度成正比關係。用來量測微小位移量有幾 種不同的方式,電子穿隧式、光學量測、壓電式、壓阻式、電容式等。電子穿隧(tunnel tips)的量測方式,具有低雜訊、高解析度(低於 0 0.001 /Α Hz )、可與矽微加工技術相容等 優點,但是可量測的位移量範圍相對其他方式較小。光學量測(optical method)具有高精確度、低雜訊,但設計複雜且昂貴。壓阻(piezo-resistive)或壓電(piezo-electric)方式具有 便宜且感測電路設計簡單等優點,然而其有易受溫度變動而干擾的缺點。電容式 (capacitive method)因與積體電路製程相容性佳,溫度效應不明顯,設計製作較簡單,不 需要額外的製程,可做為驅動與感測用等優點,是被廣泛使用的方式。 最普遍的電容感測介面設計為梳狀(comb)結構,兩側為靜止不動的梳狀手指,中間 為可移動的梳狀手指,其感測方式依據中間梳狀手指移動的方向分為間隙近接式(gap closing)與橫向式(lateral)。一般來說,梳狀結構的兩電極間隙通常為數個微米( mμ ),若 以量測位移量的大小範圍,橫向式可以具有相對較大的位移,再者,電容值的變化與位 移的關係,橫向式具有較佳的線性度。 一般來說,梳狀手指的厚度在 2 mμ ,兩電極間距xo =1μm,梳狀手指覆蓋長度 150 L= μm,則一組平行電極板間的電容值約為 3.1 fF 。而典型的梳狀結構設計會有 20 到 60 組的平行電極板並聯在一起,則電容值總和約為 60 fF 到 200 fF 。 圖 2-3 梳狀結構感測方式 梳狀結構在微加工製造的過程中,可移動的梳狀手指,在光罩曝光的時候是否有對 準,來分別探討接上後端放大電路,對電壓輸出的影響。圖 2-4(a) 為光罩有對準所曝光 蝕刻出來的梳狀結構,兩兩梳狀手指的間距相同,而圖 2-4(b) 為光罩擺放有偏移所曝光 蝕刻出來的梳狀結構,其梳狀手指間距不盡相同,中間可移動的梳狀手指也偏離中心
線,使得左側平行電極板的覆蓋長度與右側平行電極板的覆蓋長度不同。另外在向下蝕 刻的深度W,也可能與預期深度有所差異,在製作梳狀結構的過程中遇到的這些非理想 因素,皆會造成訊號輸出與理想訊號輸出有所不同。 圖 2-4 梳狀結構斜視圖 在此選用圖 2-5 的感測電路做為訊號放大用,這是一種將電容變化值轉換成電壓訊 號的感測電路,所考慮的電路非理想因素包括:運算放大器的電壓偏移量(offset voltage, os V )、因導線產生的寄生電容(CP)、雜訊、感測電路的輸出訊號飄移量。 電容值是與材料介電常數和導體面積成正比,與兩導體間距成反比。在電路板製作 的過程中,兩兩導線平行都有可能會非預期的電容出現,或是導線與電路地端間也會產 生不必要的電容,如圖 2-6。這些非預期的電容,稱之為寄生電容,通常寄生電容值會 在數個至數十個 pF ,會造成頻率響應降低,或是使系統不穩定。 再者,理想的運算放大器(OP Amplifier)是完全匹配的,V+ =V− =0時,VO =0,此 時,電壓偏移量為零。然而,實際應用運算放大器時,由於輸入電晶體未能匹配,這種 不匹配在輸入端產生了不相等的偏壓電流和不相等的電壓,因此,需要在兩輸入端間加 入一微小的電壓,來平衡不匹配的現象,此電壓稱為電壓偏移量,依據所選用的放大器 是金屬氧化物半導體場效應電晶體(MOSFET)或是雙極性電晶體(BJT),電壓偏移量約數
個 Vμ 到數個mV。
圖 2-5 感測電路
圖 2-6 電容耦合描述模型
2.3.1 理想感測介面搭配感測電路
將梳狀感測介面模型化成差動電容對,其中R 為回授電阻,f V 為電壓偏移量os
(Offset voltage),C 為寄生電容,p V 為差動電容直流偏壓,i 為感測介面流出的電流,iR
圖 2-7 理想梳狀感測電路示意圖 差動電容對的兩端電壓差分別為V1和V2 1 2 A A V V V V V V = − = − − 可變電容值分別為C1和C2 1 2 o o o o W C C N x Z W C C N x Z ε ε = + = − 其中 o C 為起始電容值 N 為梳狀手指(comb finger)的數目 o ε 為介電常數( 12 8.85 10× − /F m) W為一根梳狀手指覆蓋寬度(overlapping width) Z 為梳狀手指間的間距(gap) x為質量塊的位移(自起始點的位移)
當可動的梳狀手指來回振動的時候,會使得兩電極板間的覆蓋面積改變,進而使得 電容值產生變化,當此電容值產生變化,造成電荷(Q)流出感測介面,此電荷大小為電 容值和電壓差的乘積,因有上下兩組平行板電容,電荷可以寫為C V1 1+C V2 2,另外,電 荷對時間的微分即為電流。
(
)
(
)
(
)
1 1 2 2 2 2 o o A o o A o A o d i C V C V dt d W W C N x V V C N x V V dt Z Z d W C V VN x dt Z ε ε ε = + ⎡⎛ ⎞ ⎛ ⎞ ⎤ = ⎢⎜ + ⎟ − +⎜ − ⎟ − − ⎥ ⎝ ⎠ ⎝ ⎠ ⎣ ⎦ ⎛ ⎞ = ⎜− + ⎟ ⎝ ⎠ 利用節點法可得(
0)
p R A A o p f i i i d V V V C dt R = + − − = + 經過整理,得到可移動梳狀手指移動速度與電壓的關係式如下:(
)
2 2 os o f o f o p os dV W V R VN x R C C V Z dt x ε α η = − + + + = + & & 其中 α 為比例常數(scale factor) η為輸出訊號飄移量(drift)2.3.2 具瑕疵感測介面搭配感測電路
將梳狀感測介面模型化成差動電容對,其中R 為回授電阻,f V 為電壓偏移量os
(Offset voltage),C 為寄生電容,p V 為差動電容直流偏壓,i 為感測介面流出的電流,iR
為流向回授電阻的電流,i 為流向寄生電容的電流。此節與上節不同之處在於,梳狀結p 構在製作上有瑕疵存在,即光罩擺放有產生偏移或是向下蝕刻的深度與預期不同,造成 兩平行板電極間的覆蓋面積、相隔距離和預設值有所落差。 圖 2-8 非理想梳狀感測電路示意圖 差動電容對的兩端電壓差分別為V1和V2 1 2 A A V V V V V V = − = − − 可變電容值分別為C1和C2 1 1 2 2 o o o o W C C N x Z W C C N x Z ε ε = + ′ = − ′ 其中
1 C 2 o o C 、 為起始電容值 N 為梳狀手指(comb finger)的數目 o ε 為介電常數( 12 8.85 10× − /F m) W為一根梳狀手指覆蓋寬度(overlapping width) Z ′ 為梳狀手指間的間距(gap) ( Z′ = − Δ , ZZ Z Δ 為偏移距離) x為質量塊的位移(自起始點的位移) 當可動的梳狀手指來回振動的時候,會使得兩電極板間的覆蓋面積改變,進而使得 電容值產生變化,當此電容值產生變化,造成電荷(Q)流出感測介面,此電荷大小為電 容值和電壓差的乘積,因有上下兩組平行板電容,電荷可以寫為C V1 1+C V2 2,另外,電 荷對時間的微分即為電流。
(
)
(
)
(
)
(
)
(
)
1 1 2 2 1 2 1 2 1 2 2 o o A o o A o o A o o o d i C V C V dt d W W C N x V V C N x V V dt Z Z d W V C C V C C VN x dt Z ε ε ε = + ⎡⎛ ⎞ ⎛ ⎞ ⎤ = ⎢⎜ + ⎟ − +⎜ − ⎟ − − ⎥ ′ ′ ⎝ ⎠ ⎝ ⎠ ⎣ ⎦ ⎡ ⎤ = ⎢ − − + + ⎥ ′ ⎣ ⎦ 利用節點法可得(
0)
p R A A o p f i i i d V V V C dt R = + − − = + 經過整理,得到可移動梳狀手指移動速度與電壓的關係式如下:(
1 2)
2 os o f o f o o p os dV W V VR N x R C C C V Z dt x ε α η = − + + + + ′ = + & &其中 α 為比例常數(scale factor) η為輸出訊號飄移量(drift) 在此以下列表格所示,以做為後續數值模擬用的參數,假設梳狀手指兩平行電極板 覆蓋寬度為 2 mμ 、覆蓋長度為 100 mμ 、間距為 1 mμ ,有 N=100 對平行電極板,則兩 側起始電容值皆為Co =885fF,若在擺光罩曝光時水平方向與垂直方向產生了誤差,則 覆 蓋 長 度 變 為 100± 0.1 mμ , 間 距 變 為 1 ± 0.1 mμ , 則 兩 側 起 始 電 容 值 分 別 為 1 993.2 o C = fF、Co2 =973.5fF,寄生電容Cp =2pF,若選用回授電阻Rf =100kΩ,則電 壓輸出約為數個 Vμ 。如果想要提高電壓輸出至mV 等級,回授電阻須大於10MΩ,但 是這樣也會造成雜訊跟著被放大,因此,在後端可以加上第二級放大電路來放大電壓 值,以便於量測。 參數 數值 o C 885 fF 1 o C 993.2 fF 2 o C 973.5 fF p C 2 pF N 100 表 2 感測介面參數
2.4 模型建構
由上述的說明,機械結構瑕疵造成了七個未知的系統參數且質量塊質量未知,感測介面的瑕疵與感測電路的非理想因素會造成量測訊號輸出被比例放大或縮小,及存在訊 號飄移量。在本文中,未知質量和機械結構、感測介面瑕疵以及感測電路非理想效應的 影響將由狀態觀察器加以估測。為了方便建構一狀態觀察器,將振動式陀螺儀的動態方 程式改寫如下(4),x 軸的位置(x)、速度(x&)、剛性係數(k )、阻尼係數(xx d ),y 軸的位xx 置( y )、速度( y& )、剛性係數(k )、阻尼係數(yy d ),角速度(yy Ω ),跨軸的剛性係數(k )xy 與阻尼係數(d ),以及質量塊質量(xy m)為所選取的狀態,且此狀態空間形式的模型所測 量到的訊號為兩軸的速度所對應的電壓值輸出。
( )
X f X BU Z CX D = + = + & 其中 1 T z xx yy xy xx yy xy X x x y y k k k d d d m ⎡ ⎤ =⎢ Ω ⎥ ⎣ & & ⎦( )
12 1 2 2 0 0 xx xy xx xy z xy yy xy yy z x k x k y d x d y y y f X k x k y d x d y x × ⎡ ⎤ ⎢− − − − + Ω ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = −⎢ − − − − Ω ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ && & & &
& & &
M
[ ]
2 8 1 0 0 0 0 1 0 0 0 T m B m × ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ x y u U u ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦[ ]
2 8 0 0 0 0 0 0 0 C α β × ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦x y D η η ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦ 其中 2 2 x f x o x y f y o y W VR N Z W VR N Z α ε β ε = − ′ = − ′
(
)
(
)
1 2 1 2 osx x f o o p osx osy y f o o p osy dV R C C C V dt dV R C C C V dt η η = + + + = + + +第三章 單軸控制輸入微機電振動式陀螺儀系統
在本章節中,先驗證陀螺儀系統的觀察性,也就是須確定系統是否為可觀察的 (observable)。藉由觀察性矩陣(observability matrix)為滿秩(full rank),可以得知系統為可 觀察的。接著建立一狀態觀察器,對此觀察器作收斂性分析,然後選用單軸輸入兩頻率 的控制輸入來做數值模擬與討論。
3.1 觀察器設計
狀態觀察器(如圖 3-1)是一種模擬真實系統的系統,它可以藉由測量真實系統的輸 入與輸出訊號,來估測出真實系統的內部狀態(internal state),是一種典型的數學模型可 以很容易的在電腦運算中實現。 圖 3-1 狀態觀察器概念圖 在建立觀察器之前,必須先確定陀螺儀系統的觀察性。非線性系統的觀察性矩陣可 以簡單的用以下的方式驗證:[
z z& z&& L]
X Wo ∂ ∂ ≡ 其中 z 為系統的感測器輸出, X 為系統狀態。若觀察性矩陣為呈現滿秩的情況,則可以稱此陀螺儀系統為可觀察的。系統的觀察 性矩陣可以整理為以下形式:
[ ]
[ ]
[ ]
1 4 48 4[ ]
4 88 8 0 0 o kd C W W × × × × ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦ 其中 1 0 1 0 0 0 0 0 1 0 0 0 0 xx xy xy yy C k k k k ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ =⎢ ⎥ − − ⎢− − ⎥ ⎢ ⎥ ⎣ ⎦ (3) (3) (3) (3) (3) (3) (4) (3) (3) (4) (4) (3) (4) (3) (3) (4) (4) (3) (5) (4) (4) (5) ( 2 0 0 2 0 0 2 0 0 2 0 0 2 0 0 2 0 0 2 0 0 x y x y kd x y y x y x y u x y x y x u y x y x y u x y x y x u W y x y x y u x y x y x u y x y x y − − − − − − − − − − − − − − − − − − = − − − − − − − − − − − − −&& & & && && & && & & && && &
&& && &&
&& && &&
5) (4) (5) (4) (4) (5) (5) (4) 2 0 0 x y u x y x y x u ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ − − − − − ⎢ ⎥ ⎣ ⎦ 以上可以清楚發現,無論動態耦合是否存在(kxy是否為零)或兩軸共振頻率是否匹 配(k 與xx kyy是否相等),C 必定呈滿秩(full rank)的情況,也就是說其對應的四個系統狀1 態可以經由參數估測求得。此外,檢視整理過後的W 也可以發現,只要兩軸(x 與 y)的kd
頻率不同,即 x≠ y、x& ≠ 、y& x&& y≠ &&L,即系統存在有兩個頻率以上的動態,則W 也kd
必定呈滿秩的情況,其所對應包含角速度在內的八個系統參數都可以經由參數估測求 得。
因此,只要系統存在有兩個頻率以上的動態,就可以用狀態觀察器來估測每一個「系
( )
(
)
ˆ ˆ ˆ ˆ ˆ X f X BU LC X X Q Z CX = + + − + = & 其中[ ]
1 4 1 12 1/ 1 8 0 xx yy xy xx yy xy T T T k k k d d d m Q f f f f f f f f f f × × Ω × ⎡ ⎤ = ⎣ ⎦ ⎡ ⎤ = ⎣ ⎦ L 為觀察器增益,並可藉由各式的觀察器建構方式來獲得此一增益值。 在控制理論中,提出了許多不同的方法來分析系統的穩定性,在此我們使用里奧普 諾夫直接法(Lyapunov direct method)來作穩定性的分析。里奧普諾夫直接法(Lyapunov direct method),又稱作為里奧普諾夫第二方法(Lyapunov second method),這個方法是基 於能量的觀點,藉由討論系統能量的改變速率來確定系統的穩定性。根據區域正定義函數(locally positive definite function)的定義,考慮一個函數 ( ) : n V x R → 是區域正定義函數,假使存在R ε >0、連續遞增函數 : Rα + → , R (0, ) 0 V t = 而且 ( , ) ( ) V x t ≥α x ∀ ∈x Bε,∀ ≥ t 0 這個區域正定義函數如同一個能量函數。
而這個里奧普諾夫直接法(Lyapunov direct method)提出當 ( , )V x t 是一個區域正定義
函數而且 ( , )V x t 的一次微分函數 ( , )V x t& ≤0,可以說此系統在平衡點上是穩定的。
可以藉由里奧普諾夫直接法(Lyapunov direct method)來證明觀察器的收斂性,首先
e&= −LCe+ %F 其中 2 1 2 1 2 2 1 2 1 2 1/ 1/ 12 1 ˆ ˆ ˆ ˆ ˆ ( 2 ) 2 ˆ ˆ ˆ ˆ ˆ ( 2 ) 2 z xx xy xx xy z yy xy yy xy x xx x xx x xy y xy z y k k d d x m y xy x xy z x yy y yy y k k d d y m e k e d e k e d e ye xe ye xe ye u e F e k e d e k e d e xe ye xe ye xe u e f Ω Ω × ⎡ ⎤ ⎢ ⎥ − − − − − Ω + − − − − + ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ − − + Ω − − − − − − − + ⎢ ⎥ ⎢ − ⎥ ⎣ ⎦
& & &
%
& & &
L 為觀察器增益。 此時,選取一個區域正定義的里奧普諾夫函數(Lyapunov function) 1 2 T V = e Pe 其中
[ ]
[ ]
[ ]
4 8 8 4 8 8 0 0 1 0 0 0 0 0 0 0 1 0 xx xy xy xy xy yy k k d k d k P I × × × ⎡⎡ ⎤ ⎤ ⎢⎢ ⎥ ⎥ ⎢⎢ ⎥ ⎥ ⎢⎢ ⎥ ⎥ = ⎢⎢ ⎥ ⎥ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 須是一個正定義(positive definite)矩陣 而 P 為正定義的條件為 2 xx yy xy k k >k ,如此我們所選取的里奧普諾夫函數是為一區域 正定義的函數。 對選取的里奧普諾夫函數做一次微分,然後將 e&= −LCe+ %F代入,重新分組後得到 下列式子: T T T s p V& = −e E Pe+E Pe ... (1) 其中T T s
e E 為原始狀態(original states)的誤差動態。
T P
E 為擴增狀態(full extended states)的誤差動態。
對於式(1)的前項(原始狀態項),我們可以得到如下式子 2 2 2 2 2 2 2 2 21 42 T T s xx x yy y x y e E Pe d e d e L e L e − = − − − − 因為d 和xx d 為兩軸組尼係數,yy L 和21 L 為觀察器增益,這四個值恆為正,所以42 T T s e E Pe − 必定小於或等於 0。 再者,對於式(1)的後項(擴增狀態項)
[
1 2 3 4 5 6 7 8 12 8]
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 ˆ ˆ 0 2 0 2 ˆ 0 0 0 ˆ 0 0 0 ˆ ˆ 0 0 ˆ 0 0 0 ˆ 0 0 0 ˆ ˆ 0 0 0 0 T T p x y y x x E Pe e y f f f f f f f f Pe y x x y y x u u × ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ − ⎢ ⎥ ⎢ ⎥ = − ⎢ ⎥ ⎢ − − ⎥ ⎢ ⎥ − ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ − − ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ & & & & & & 可以透過選擇 f1 f2 f3 f4 f5 f6 f7 f 使得8 E PepT 等於 0。 藉此,我們可以得到如下的適應性法則, 1/ 1 8 1 2 3 4 5 6 7 8 1 8 xx yy xy xx yy xy T k k k d d d m T T T T T T T T f f f f f f f f f e f e f e f e f e f e f e f e f Ω × × ⎡ ⎤ = ⎣ ⎦ ⎡ ⎤ = −⎣ − − − − − − − ⎦3.2 控制輸入
我們將微機電陀螺儀動態方程式改寫成狀態空間的形式,陀螺儀動態方程式是為一 非線性系統,改寫成狀態空間形式後,此非線性的系統可以看成一線性系統,而線性系 統須符合重疊理論(superposition theorem),因此,為了瞭解假設是否成立,對此狀態空 間形式的陀螺儀系統作開路模擬,陀螺儀系統分別於驅動軸輸入 8Hz 以及 20Hz 的訊 號,我們將兩者輸出的訊號相加,圖 3-2(a)(d),與於驅動軸同時輸入 8Hz 以及 20Hz 訊 號,圖 3-2(b)(e)的輸出訊號做比較,發現此狀態空間形式的陀螺儀系統符合重疊 (Superposition)原理,所以所選用的控制輸入可以是兩個頻率的訊號。( )
X f X BU AX BU = + = + & 其中 0 1 0 0 2 0 0 0 1 2 xx xx xy xy xy xy yy yy k d k d A k d k d ⎡ ⎤ ⎢− − − − + Ω⎥ ⎢ ⎥ =⎢ ⎥ ⎢− − − Ω − − ⎥ ⎢ ⎥ ⎣ ⎦ 0 0.5 1 -10 0 10 X-axis 8Hz+20Hz 0 0.5 1 -10 0 10 Y-axis 8Hz+20Hz 0 0.5 1 -10 0 10 X-axis Input 8Hz+20Hz 0 0.5 1 -10 0 10 Y-axis Input 8Hz+20Hz 0 0.5 1 -2 0 2x 10 -11 0 0.5 1 -2 0 2x 10 -11 圖 3-2 分別輸入 8Hz、20Hz 與同時輸入 8Hz、20Hz 訊號之比較 (a) (b) (c) (d) (e) (f)控制器設計的目的在於使系統具可觀察性,經分析結果,其控制輸入可設計為一具 兩個頻率的訊號如下: 1 2 sin( ) sin( ) 0 t t U = ⎢⎡ ω + ω ⎤⎥ ⎣ ⎦ 其中ω1、ω2為任意選取的兩個頻率。
3.3 數值模擬結果
3.3.1 角速度為定值
0 0.5 1 1.5 2 x 10-3 -1.5 -1 -0.5 0 0.5 1 1.5x 10 -5 X po sit ion (m ) time(sec) real system estimation 0 0.5 1 1.5 2 2.5 x 10-3 -6 -4 -2 0 2 4 6 8x 10 -6 Y posi tion(m) time(sec) real system estimation 0 0.2 0.4 0.6 0.8 1 1.2 x 10-3 -0.2 -0.1 0 0.1 0.2 X velo cit y(m/s ) time(sec) real system estimation 0 0.2 0.4 0.6 0.8 1 1.2 1.4 x 10-3 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 Y v e lo city (m/s) time(sec) real system estimation 圖 3-3 系統動態估測模擬,單軸輸入兩頻率0 0.05 0.1 0.15 0.2 0.8998 0.9 0.9002 M time(sec) 0 0.05 0.1 0.15 0.2 0.98 0.99 1 1.01 1.02 Ω z( ra d/ se c) time(sec) 0 0.05 0.1 0.15 3.553 3.5531 3.5531 x 108 Kx x time(sec) 0 0.05 0.1 0.15 0.2 3.553 3.553 3.5531 3.5531 3.5531 x 108 Kyy time(sec) 0 0.05 0.1 0.15 3.1977 3.1977 3.1978 3.1978 x 107 Kxy time(sec) 0 0.05 0.1 0.15 0.2 9.9 9.95 10 10.05 10.1 Dx x time(sec) 0 0.05 0.1 0.15 0.2 9.98 9.99 10 10.01 10.02 Dy y time(sec) 0 0.05 0.1 0.15 0.2 -0.02 -0.01 0 0.01 0.02 Dx y time(sec) 圖 3-4 系統參數為定值的估測模擬,單軸輸入兩頻率
3.3.2 角速度隨時間變動
圖 3-5 系統動態估測模擬,單軸輸入兩頻率(角速度隨時間變動)圖 3-6 系統參數的估測模擬,單軸輸入兩頻率(角速度隨時間變動)
3.3.3 觀察性矩陣奇異值
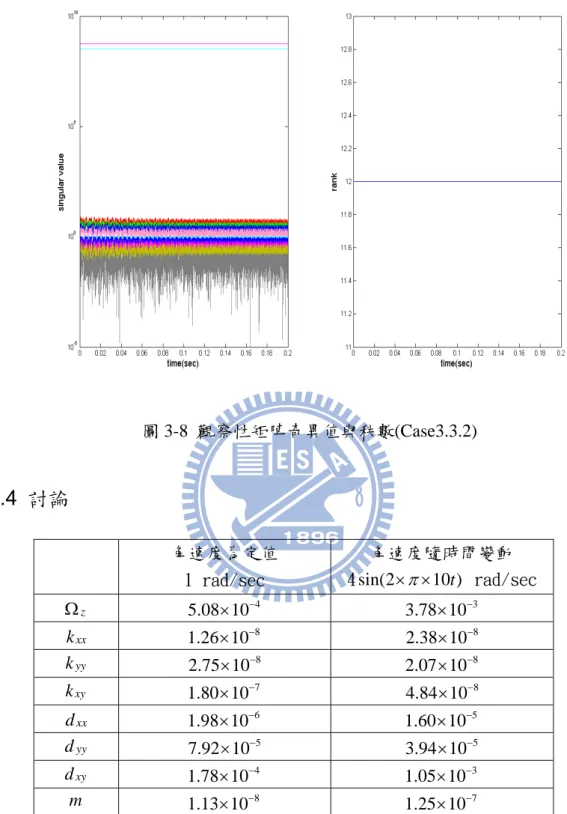
圖 3-8 觀察性矩陣奇異值與秩數(Case3.3.2)
3.4 討論
角速度為定值 1 rad/sec 角速度隨時間變動 4 sin(2× ×π 10 )t rad/sec z Ω 4 5.08 10× − 3.78 10× −3 xx k 1.26 10× −8 2.38 10× −8 yy k 8 2.75 10× − 2.07 10× −8 xy k 7 1.80 10× − 4.84 10× −8 xx d 6 1.98 10× − 1.60 10× −5 yy d 5 7.92 10× − 3.94 10× −5 xy d 4 1.78 10× − 1.05 10× −3 m 8 1.13 10× − 1.25 10× −7 表 3 穩態時估測相對精確度 系統模擬用參數如附錄一表 6 所示,假定角速度為 1 rad/sec,圖 3-3 為系統動態的 估測,包含(x、x&、 y 、 y& );圖 3-4 為系統參數的估測 (Ω 、z k 、xx kyy、kxy、d 、xx dyy、xy d 、m)。所有的估測值皆在 80 毫秒內收斂至正確值。收斂後的估測相對精確度(定 義為:(正確值-估測值)/(正確值))分別為:( 3 2.7 10× −、 6 8.42 10× −、 7 6.41 10× − 、 5 9.87 10× −、 3 3.3 10× − 、 3 3.7 10× − 、 4 2.4 10× − 、 6 7.43 10× − )。接下來討論角速度隨時間變動的情形, 假定角速度為 sin(2× ×π 100 )t rad/sec,圖 3-5 為系統動態的估測;圖 3-6 為系統參數的 估測,可以發現各估測的參數值沿著正確值在一定的區間內震盪。
第四章 雙軸控制輸入微機電振動式陀螺儀系統
在 2.3 節所提出的模型建構中,輸出方程式Z =CX +D,將其展開可得, x x y y Z x Z y α η β η + ⎡ ⎤ ⎡ ⎤ = ⎢ ⎥ ⎢ + ⎥ ⎣ ⎦ ⎣ ⎦ & &其中α 、β為訊號的比例常數(scale factor),ηx、ηy分別為訊號輸出飄移量(drift)。
本章節中,先對原x狀態的陀螺儀系統模型,轉換成h狀態的陀螺儀系統模型,接
著驗證陀螺儀系統模型的觀察性,也就是須確定系統是否為可觀察的(observable)。藉由 觀察性矩陣(observability matrix)為滿秩(full rank),可以得知系統為可觀察的。接著建立 一狀態觀察器,對此觀察器作收斂性分析,然後選用雙軸控制輸入將其補償成理想陀螺 儀動態方程式,作旋轉角度計算,並做數值模擬與討論。
4.1 代數變換
前述 2.3 節模型建構中,將微機電振動式陀螺儀系統的動態方程式寫成狀態空間的 形式, X AX BU Z CX = + = & 經由代數變換 X =PH( 1 H =P X− ),可以得出 H AH BU Z CH = + = & 其中 1 A=P AP− , 1 B=P B− , C=CP。 在x狀態下的轉移函數,(
)
1 x G =C SI−A − B 在h狀態下的轉移函數,(
)
(
)
(
)
(
)
(
)
1 1 1 1 1 1 1 1 h G C SI A B CP P SI A P P B CPP SI A PP B C SI A B − − − − − − − − = − = − = − = − 由上述轉移函數得知,在x狀態下的轉移函數與在h狀態下的轉移函數相同,則兩 個不同狀態的系統特性也會相同。再者,從系統觀察性來看,在x狀態下的觀察性矩陣 為 2 n 1 T x O C CA CA CA − − − = ⎣⎡ L ⎤⎦ 在h狀態下的觀察性矩陣為2 1 2 1 T n h T n O C CA CA CA C CA CA CA Q − − − − ⎡ ⎤ = ⎣ ⎦ ⎡ ⎤ = ⎣ ⎦ L L 因為 detQ≠ ,所以0 h x x
rank O rank O Q rank O
− − − − = − = − 。 因此,經過轉換後的系統的觀察性不變,在h狀態下的系統具有可觀察性。 在這個雙軸控制輸入的微機電陀螺儀系統,考慮量測的比例常數與飄移量,先對原 系統動態方程式,做代數變換 X =PH ( 1 H =P X− ) 1 0 0 0 0 0 0 0 0 0 0 0 0 x x y y H P X h x h x h y h y α α β β − = ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢= ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ & & & & 其中α 為量測x軸訊號的比例常數,β為量測 y 軸訊號的比例常數。 2 2 xy xy xx xx x x y x y x y xy yy xy yy y x y x y y x D K D K h h h h h u h m m m m m D D K K h h h h h u h m m m m m α α α α β β β β β β β α α α + + + + = + Ω + + + + = − Ω
&& & & &
&& & & &
寫成狀態空間形式
( )
H f H BU Z CH η = + = + & 其中T x x y y z xx yy xy xx yy xy x y H h h h h k k k d d d m m α α α α β η η β β β ⎡ ⎤ =⎢ Ω ⎥ ⎣ & & ⎦
( )
15 1 2 2 0 0 x xx x xy y xx x xy y z y y xy x yy y xy x yy y z x h k h k h d h d h h h f H k h k h d h d h h α α α β β β β β β α α α × ⎡ ⎤ ⎢ ⎥ ⎢− − − − + Ω ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = − − − − − Ω ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ && & &
&
& & &
M
[ ]
2 11 0 0 0 0 0 0 0 T m B m α β × ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ x y u U u ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦[ ]
2 11 0 1 0 0 0 0 0 0 1 C= ⎢⎡ × ⎤⎥ ⎣ ⎦ x y η η = ⎢ ⎥⎡ ⎤η ⎣ ⎦4.2 觀察器設計
在建置狀態觀察器之前,必須先確定陀螺儀系統的觀察性。非線性系統的觀察性矩 陣可以簡單的用以下的方式驗證:[
z z& z&& L]
H Wo ∂ ∂ ≡ 其中 Z 為系統的感測器輸出, H 為系統狀態。 系統的觀察性矩陣可以整理成[ ]
[ ]
[ ]
01 4 411 4[ ]
0 4 1111 11 o kd C W W × × × × ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦ 其中 1 0 1 0 0 0 0 0 1 0 0 0 0 xx xy xy yy C k k k k α β β α ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ =⎢ − − ⎥ ⎢ ⎥ ⎢ ⎥ − − ⎢ ⎥ ⎣ ⎦ 2 2 2 2 2 2 (3) (3) (3) 2 2 2 (3) (3) (3) 2 2 2 (4) (3) (3) 2 0 0 0 2 0 0 0 2 0 0 0 0 0 2 0 0 0 0 0 2 0 y x y x y x xx xy x y x y x y xy yy y x y x y x x y x y x y y x y x kd h h h h h u k k h h h h h u k k h h h h h u h h h h h u h h h h W α β β β β β α α α α β β β α α α − − − − − − − − − − − − − − − − − − − − − =&& & & && && &
&& & & && && &
&& && &&
&& && &&
(4) (4) (3) 2 2 2 (4) (3) (3) (4) (4) (3) 2 2 2 (5) (4) (4) (5) (5) (4) 2 2 2 (5) (4) (4) (5) (5) (4) 2 2 2 (6) (5) (5) (6) (6) (5 0 0 0 0 2 0 0 0 0 0 2 0 0 0 0 0 2 0 0 0 0 0 2 0 0 y x x y x y x y y x y x y x x y x y x y y x y x y x h u h h h h h u h h h h h u h h h h h u h h h h h u β β β α α α β β β α α α − − − − − − − − − − − − − − − − − − − ) 2 2 2 (6) (5) (5) (6) (6) (5) 2 2 2 (7) (6) (6) (7) (7) (6) 0 0 0 2 0 0 0 0 0 2 0 0 0 0 0 x y x y x y y x y x y x h h h h h u h h h h h u β β β α α α ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ − − − − − ⎢ ⎥ ⎢ ⎥ − − − − ⎢ ⎥ ⎣ ⎦ 以上可以清楚發現,無論動態耦合是否存在(kxy是否為零)或兩軸共振頻率是否匹 配(k 與xx kyy是否相等),C 必定呈滿秩(full rank)的情況,也就是說其對應的四個系統狀1 態可以經由參數估測求得。此外,檢視整理過後的W 也可以發現,當系統初始條件皆kd
有兩個頻率以上的動態,則W 也必定呈滿秩的情況,其所對應包含角速度在內的 11kd 個系統參數都可以經由參數估測求得。當系統初始條件為非 0 時,則在某些情況下兩軸 輸入相同頻率也可以得到滿秩的情形。 因此,只要系統存在有兩個頻率以上的動態,就可以用狀態觀察器來估測每一個「系 統狀態」,進而採取狀態回授來補償非理想效應,狀態觀察器可以表示如下:
( )
(
)
ˆ ˆ ˆ ˆ ˆ ˆ H f H BU LC H H Q Z CH η = + + − + = + & 估測誤差e =H− Hˆ e&= −LCe+ %F 其中 2 1 2 3 4 / 4 2 2 2 2 1 2 3 4 / 2 2 2 2 ˆ ˆ ˆ ˆ ˆ ( 2 ) 2 ˆ ˆ ˆ ˆ ˆ ( 2 ) 2 z xx xy xx xy z yy xy yy xy xx xx xy xy z y x k y k x d y d x m xy xy z yy yy x y k x k y d x d y m e k e d e k e d e h e h e h e h e h e u e e F k e d e k e d e h e h e h e h e h e u e f α β β β β β α α α α Ω Ω ⎡ ⎤ ⎢ ⎥ − − − − − Ω + − − − − + ⎢ ⎥ ⎢ ⎥ ⎢ = ⎢ ⎢− − + Ω − − − − − − − + ⎢ ⎢ − ⎣ ⎦& & &
%
& & &
15 1× ⎥ ⎥ ⎥ ⎥ ⎥ L 為觀察器增益。 此時,選取一個區域正定義的里奧普諾夫函數(Lyapunov function) 1 2 T V = e Pe 其中
[ ]
[ ]
[ ]
2 2 4 11 2 2 11 4 11 11 0 0 1 0 0 0 0 0 0 0 0 xx xy xy xy xy yy k k d k d k P I α β α β × × × ⎡⎡ ⎤ ⎤ ⎢⎢ ⎥ ⎥ ⎢⎢ ⎥ ⎥ ⎢⎢ ⎥ ⎥ ⎢⎢ ⎥ ⎥ = ⎢⎢ ⎥ ⎥ ⎢⎢ ⎥ ⎥ ⎢⎢ ⎥ ⎥ ⎢ ⎥ ⎢⎣ ⎦ ⎥ ⎢ ⎥ ⎣ ⎦ 須是一個正定義矩陣。 而 P 為正定義的條件為 4 2 4 k kxx yy kxy α β > ,如此我們所選取的里奧普諾夫函數是為一 區域正定義的函數。 對選取的里奧普諾夫函數做一次微分,將 e&= −LCe+ %F代入,重新分組後得到下列 式子: T T T s p V&= −e E Pe+E Pe……… (2) 其中 T T s e E 為原始狀態(original states)的誤差動態。 T PE 為擴增狀態(full extended states)的誤差動態。
對於式(2)的前項(原始狀態項),我們可以得到如下式子 2 2 2 2 2 2 2 2 21 42 T T s xx x yy y x y e E Pe d e d e L e L e − = − − − − 因為d 和xx d 為兩軸組尼係數,yy L 和21 L 為觀察器增益,這四個值恆為正,所以42 T T s e E Pe − 必定小於或等於 0。
再者,對於式(2)的後項(擴增狀態項)
[
]
2 2 2 2 1 2 3 4 5 6 7 8 9 15 11 2 2 21 42 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 ˆ ˆ 0 2 0 2 ˆ 0 0 0 ˆ 0 0 0 ˆ ˆ 0 0 ˆ 0 0 0 ˆ 0 0 0 ˆ ˆ 0 0 0 0 0 0 0 0 0 0 0 0 0 0 y x x y T T y x p A B x y y x x y h h h h h h E Pe e f f f f f f f f f f f h h h h u u L L β α β α β α × ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ − ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ − − ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ − ⎢ ⎢ − − ⎢ ⎢ ⎢ ⎢ ⎢ − ⎢ ⎢ − ⎣ ⎦ & & & & & & Pe ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ 可以透過選擇 f1 f2 f3 f4 f5 f6 f7 f 使得8 E PepT 等於 0。 藉此,我們可以得到如下的適應性法則, / / 1 11 1 2 3 4 5 6 7 8 9 1 11 xx yy xy xx yy xy x y T k k k d d d m m n n T T T T T T T T T T T A B f f f f f f f f f f f f e f e f e f e f e f e f e f e f e f e f e f α β Ω × × ⎡ ⎤ = ⎣ ⎦ ⎡ ⎤ = −⎣ − − − − − − − − − − ⎦4.3 控制輸入
由觀察器所估測獲得的系統動態(速度、位置)及系統參數(剛性係數、阻尼、等) 可用來計算系統的控制輸入。若欲直接獲得角度資訊,其控制輸入可設計如下:⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − + + + + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + + + = y y y yy x xy y yy x xy x x y xy x xx y xy x xx h k h k h k h d h d m h k h k h k h d h d m U τ α β α β β τ β α β α α ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ & & & & 其中 k 即為補償後之振動式陀螺儀系統的剛性係數,τx和τy為額外加入的輔助訊 號。一旦狀態觀察器估測的參數收斂到正確值,補償過後的系統動態可用下列方程式描 述: y x z y y x y z x x h kh h h kh h τ α β τ β α + Ω − = + + Ω = + & && & && 2 2 將補償過後系統的動態輸出通過一低通濾波器(Lowpass filter),將τx和τy對系統動 態影響的訊號過濾掉,僅留下旋轉角速度對系統動態的影響。 x z y y y z x x h kh h h kh h & && & && Ω − = + Ω = + α β β α 2 2 再將h狀態的系統方程式轉回x狀態,則可以得到 x ky y y kx x z z & && & && Ω − = + Ω = + 2 2 此時搭配 B. Friedland 與 M. Hutton 在 1978 年所推導出的角度計算公式:
(
)
(
2 2) (
2 2)
2 2 tan y x y x k y x y x k & & & & − + − ⋅ ⋅ + ⋅ ⋅ = φ(
)
(
) (
)
⎟⎟⎠⎞ ⎜⎜ ⎝ ⎛ − + − ⋅ ⋅ + ⋅ ⋅ = − 2 2 2 2 1 2 tan 2 1 y x y x k y x y x k & & & & φ 即可計算出待測物的旋轉角度值。利用此角度公式會遇到的問題在於正切函數(tangent) y=tanx在 2 2 π π < < − x 時為 一 對 一 且 映 成 ( 映 至 R ) , 則 反 正 切 函 數 y=tan−1x 的 定 義 域 為 實 數 R , 值 域 為 2 2 π π < < − y ,因此,在利用此公式計算角度時,僅適合角度變化較小的情況。
4.4 數值模擬結果
4.4.1 比例常數與飄移量皆為固定值
圖 4-2 系統動態估測模擬圖 4-3 系統參數估測模擬