應用非線性組合模式預測隧道內短期空氣品質之研究
李正忠 大仁科技大學環境管理研究所 副教授 通訊作者電子郵件:E-mail : [email protected]摘 要
本研究蒐集高雄市過港隧道監測及採樣分析資料,應用非線性預測組合模式(NFCM)預測交通隧道內 CO 及 NOx空氣品質,並驗證各模式之執行效能。研究結果顯示非線性預測組合模式均較CNM、GANN 佳, 而GANN 又比 CNM 有較小的殘差,原因或許是預測組合融合了兩個理論的有效訊息,所以預測能力最佳; 而GANN 比 CNM 佳的原因為 GANN 經過不斷的學習測試。整體而言非線性組合模式優於傳統的單一模式。 本研究顯示非線性預測組合模式可提高高雄市交通隧道內短期空氣品質預測之準確性。 關鍵詞:非線性預測組合模式、交通隧道、空氣品質、基因類神經網路1. 前 言
交通引起的空氣污染問題對於都市計畫規劃者及環保官員是一個主要關心的課題。在世界各地繁華城 市街道的空氣污染物(例如 NOx、CO、苯、懸浮微粒及鉛)大部分皆超過空氣品質法規規定值。和交通相關 的主要空氣污染物為 CO、NOx、碳氫化合物及微粒。CO 是能讓人窒息的空氣污染物,它會降低血液輸送 氧至不同器官的能力。因此,短時間暴露於高濃度 CO 下會對人體產生急性傷害。另一方面,空氣污染物 苯則會對人體健康產生累積性的影響。短時間暴露於高濃度苯的影響可能增加個人罹癌的風險。此外 NO2 則會對人體產生短期和長期健康影響。針對各種空氣污染物對人體健康不同的影響,空氣品質法規對大氣 污染物界定有不同的暴露時間閾值。例如,空氣品質法規標準界定CO 為 8 小時平均值,而 NO2是 1 小時 及一年平均值。隧道內空氣污染物濃度的稀釋,受到空氣流場控制及不同因子的影響;例如,交通流量、 駕駛車輛型式及其排放係數等。隧道空氣污染物濃度分佈的認知,能為交通控制的管理和通風系統的設計 改進提供重要資訊。污染物排放的數量和空間分佈,在交通管理策略或者交通條件方面的變化影響而須經 常被檢驗評估 [1]。街道空氣品質的連續監測是極為昂貴且不切實際的。因此,亟需能在個人電腦使用及計 算時間短的空氣品質擴散模式來處理隧道出入口高污染問題及執行環境影響評估 [2]。擴散模式非常廣泛地 應用於街道目前及未來在時間及空間上空氣污染物變化的預測來決定街道空氣品質 [3]。CO 濃度常作為交 通隧道通風系統設計及操作的標準,而未來排氣標準日趨嚴格,NOx 濃度的影響也將能必須考慮。類神經 網路具有訓練學習的功能,廣泛被應用於高複雜性及非線性系統之模擬、預測等方面。類神經網路於搜尋 最佳近似解時,可能會落入區域最佳解(Local Optimal),因而降低預測結果的準確性。利用基因演算法 (Genetic Algorithm; GA)之演化方式,可改善傳統之演算機制,達到預測最佳化之最終目標,對於實際改 善類神經網路之預測效果成效顯著。Fang 利用 ARIMA、DHSY 和 VAR 模式預測英國季消費支出。結果顯 示,組合模式預測精確度優於單一模式 [4]。Goyal et al.在印度的德里及香港都會區利用氣象參數多元迴 歸、ARIMA 及組合模式(氣象+ARIMA)預測每天可吸入性懸浮微粒平均濃度。結果顯示,組合模式較任 一個個別模式預測精確度高 [5]。Ye Yao et al.利用自我迴歸移動平均整合模式(ARIMA)、多次線性迴歸模 式(MLR)及灰預測模式(GM)三種模式組合成預測模式,使用權重和等於 1 的型式,應用於空調系統負 載及HVAC 系統的節能操作預測。結果顯示,組合模式較單一模式預測精確度高 [6]。Chelani and Devotta ©2007 National Kaohsiung University of Applied Sciences, ISSN 1813-3851利用印度的德里 1999~2003 年 NO2濃度監測資料,以 ARIMA 線性及非線性模式組合成混合模式來預測 NO2濃度值。結果顯示,混合模式較個別線性及非線性模式預測精確度高 [7]。
本研究將GANN, CNM 和 MGM 模式進行非線性組合成新的預測模式應用於預測縱流式通風系統交通 隧道空氣污染物並比較其預測能力。目前有各種不同的方法被用來預測空氣品質,並且這些方法經常有不 同的架構和數據。預測組合模式(Forecasting Combination Model; FCM)為利用各種不同預測模式預測值進 行線性及非線性組合成新的預測模式其可提高預測之準確度。因此,擷取前述理論方法之優點,結合電腦 化設備,發展預測組合模式,來提高交通隧道內空氣品質預測之準確度,為本研究主要探討之動機。
2. 研究方法
本研究主要是利用蒐集高雄市環保局之高雄市過港隧道監測及採樣分析資料 [8],應用 NFCM 非線性 預測組合模式預測縱流式通風系統交通隧道 CO 及 NOx空氣品質。NFCM 預測組合模式係將 CNM 模式、 MGM(1,1)模式及 GANN 模式組合成 NFCMCM 及 NFCMGM 模式來模擬及預測縱流式通風交通隧道內的 CO 及 NOx濃度。以下分別就各種模式之分析方法做一完整的介紹: 2.1 過港隧道氣體污染物採樣資料 過港隧道屬於單向雙車道(雙向四車道)之隧道,分為主車道及機車道,主車道之通風係採用無導管 縱流式可逆性噴流風扇,南北側各十六台,分別裝設於各車道頂部四台成一列,各自位於入口123、229 公 尺及距出口127、227 公尺處,可依自然風吹送方向以自動調整抽氣或排氣的方向,迅速排除隧道內被污染 的空氣。過港隧道每一方向有兩個汽車道及一個機車道,汽車道總寬度為8 公尺,機車道寬 2.6 公尺,且機 車道較汽車道高2 公尺。隧道總長度為 1492 公尺,加蓋部分有 1042 公尺。本研究僅考慮單向。氣體污染 物於三個測點使用採樣袋同時進行採樣,此三處分別為隧道內距入口 50 公尺(上風),隧道中間及距出入 口 50 公尺(下風)。採樣時於三個採樣點處設小型抽氣幫浦和採樣袋,幫浦將氣體抽入採樣袋內,再由人 員進入隧道內更換採樣袋,以進行下一階段採樣,採樣袋更換每半小時更換一次。12 小時採得 24 個樣本。 2.2 一維非穩態 Crank-Nicolson 隱性法模式(CNM) 隧道內空氣污染物濃度的稀釋受空氣動力流場的控制且受不同因子的影響;例如,交通流量、駕駛車 輛型式及其排放係數。一維非穩態理論預測 CO 及 NOx濃度分佈,其考慮的影響因子包括交通流量、車輛 排放係數、通風系統風扇、隧道壁之摩擦損失等。 2.2.1 空氣動力學分析 設Ua (m/s)為隧道內平均空氣速度,由牛頓第二定律 M F dt dU a = (1) F:作用於空氣質量 M(kg)的總力 (N) 作用於縱流式隧道內空氣主要有四種作用力;亦即車行活塞效應推力( )、噴流風扇所產生之推力 ( )、隧道壁的摩擦阻力、自然風力( )。簡述如下: p F jF
F
n1.車行活塞效應推力 車輛行駛產生氣流謂之活塞效應。 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + ⋅ ⋅ − − ⋅ ⋅ =
∑
∑
− + = = N i a c di vi N i a c di vi p A C U U A C U U F 1 2 1 2 ( ) ) ( 2 ρ (2)ρ
:空氣密度(kg/m3)N
:隧道內車流量(vel/10min) vA
:車輛的前視投影面積(m2) dC
:車輛形狀阻力係數 cU
:隧道內平均車速(m/sec) 2. 噴流風扇所產生之推力 噴流風扇的作用對隧道內空氣產生的推力。 此力可表示為: ) ( a j j j j U A Q Q n F = ⋅η
⋅ρ
⋅ ⋅ − (3)n
:風扇數目η
:風扇平均效率 jQ
:噴流風扇通風流量(m3/sec) jA
:風扇截面積(m2) 3.隧道壁的摩擦阻力 氣流流經隧道時會產生三種摩擦損失;即隧道壁產生摩擦阻力、隧道入口及出口處之水頭損失。此 三種損失表示如下 (a) 隧道壁產生摩擦阻力: a a t H A U U D L fρ
2 1 , (b) 隧道進口之收縮損失:ξ
1ρ
U
aU
aA
t2
1
, (c) 隧道出口之擴張損失:ξ
2ρ
UaUa At 2 1 故隧道摩擦阻力可以下式表示: t a a H f U U A D L f F = ( + + )⋅ ⋅ ⋅ 2 ξ1 ξ2 ρ (4)f
:隧道壁摩擦係數L
:隧道長度(m)H
D
:隧道水力直徑(m) 1ξ
:隧道入口收縮損失係數 2ξ
:隧道出口擴張損失係數 tA
:隧道斷面積(m2) 4.自然風力(F
n) 若隧道口兩端有大氣壓力差存在,則此壓差將推動空氣在隧道內流動。空氣欲在隧道內流動則必須 克服隧道壁之摩擦損失、隧道進口之收縮損失及隧道出口之擴張損失。 假設此壓力差在克服上述三項損失後所產生之風速為V
W,則這三項損失可表示為: (a) 隧道壁摩擦損失 W W t H A V V D L fρ
2 1 = (b) 隧道進口之收縮損失ξ
1ρ
VW VW At 2 1 = (c) 隧道出口之擴張損失ξ
2ρ
VW VW At 2 1 = 故大氣壓力差所造成的風力為: t W W H nV
V
A
D
L
f
F
=
(
+
+
)
⋅
⋅
⋅
2
ζ
1ξ
2ρ
(5) Fp, Fj, Ff 及 Fn 由式(2)~(5)決定。 2.2.2 隧道內空氣污染物擴散 當污染物由移動車輛排放至空氣中後,將隨氣流(Ua)傳輸擴散,其控制方程如(6)式。 將式(2) ~ (5)代入(1)得(
P j f n a F F F F M dt dU + + + = 1)
(6) 在一維非穩態理論,空氣污染物在移動介質中的傳輸可用以下濃度方程式表示: i i x i a iq
x
C
D
x
C
U
t
C
•+
∂
∂
=
∂
∂
+
∂
∂
2 2 (7) Ci :i 種類空氣污染物濃度(g/m3) x :軸長(m) Dx:縱向紊流係數(m2/s) • iq
:i 種類移動車輛空氣污染物平均排放率(g/m3-s)• i
q
由下式求得( )
600
1
1000
1 ×
×
×
=
• t i iA
N
EF
t
q
(8) EFi:i 種類車輛污染物平均排放係數(g/km)N
:隧道內車流量(輛/10min) 由於N
是t 的函數且 EFi 在特定時間 t,由平均車輛速率來決定亦為 t 的函數,故 僅為t 的函數 [9]。 • iq
2.3 創新灰色修正預測模式(MGM) GM(1,1)經常於數據曲線轉折點有高估或低估的預測值,本研究介紹一創新灰色修正預測模式(MGM) 來減少 GM(1,1)的殘差並提高預測準確度。MGM 模式流程說明如下: 步驟一:動態;等量數據;新陳代謝滾動預測 四點GM (1,1)新陳代謝滾動預測(GM(1,1)4)流程說明如下:[
1
(4
0)(
1
4
),
4
(04
)(
4
2
),
2
4
(0)4
(
3
),
4
4
(0)4
(
3
4
)
]
1
ˆ
(02
)(
3
5
)
) 0 (z
z
z
z
z
z
=
預測值 原數[
1
(04
)(
1
4
),
4
(04
)(
4
2
),
4
4
(02
)(
4
3
),
4
(04
)(
4
4
),
4
(4
0)(
4
5
3
)
]
) 0 ( 1z
z
z
z
z
z
=
原數 加入 移除[
1
(4
0)(
4
2
),
4
(4
0)(
4
3
2
),
4
(0)4
(
4
4
),
4
(0)4
(
3
5
)
]
) 0 ( 1z
z
z
z
z
=
原數[
]
⇓ = M 3 2 1 4 4 4 4 4 3 4 4 4 4 4 2 1(0)(2), (0)(3), (0)(4), (0)(5) ˆ(0)(6) ) 0 ( 2 z z z z z z 預測值 原數 預測終止 步驟二:將移動暫時數據組中四點原始數據分別與 GM (1,1)新陳代謝滾動出預測值組合 將移動暫時數據組中四點原始數據分別與GM(1,1)新陳代謝滾動出預測值組合,可得到四種不同型式 的組合模式,分別為MGMO4, MGMO3, MGMO2 及 MGMO1,滾動過程中利用移動暫時數據組求取分配 權數W
3及W
4來得到預測函數以求取預測值,依此循環類推直至欲預測目標時間為止。四種不同型式的組合模式數據組用來求取分配權數
W
3及W
4如下所示: MGMO1 MGMO2 MGMO3 MGMO4)
1
(
) 0 (z
z
ˆ
(0)(
5
)
z
(0)(
2
)
z
ˆ
(0)(
5
)
z
(0)(
3
)
z
ˆ
(0)(
5
)
z
(0)(
4
)
z
ˆ
(0)(
5
)
)
2
(
) 0 (z
z
ˆ
(0)(
6
)
z
(0)(
3
)
z
ˆ
(0)(
6
)
z
(0)(
4
)
z
ˆ
(0)(
6
)
z
(0)(
5
)
z
ˆ
(0)(
6
)
)
3
(
) 0 (z
z
ˆ
(0)(
7
)
z
(0)(
4
)
z
ˆ
(0)(
7
)
z
(0)(
5
)
z
ˆ
(0)(
7
)
z
(0)(
6
)
z
ˆ
(0)(
7
)
)
4
(
) 0 (z
z
ˆ
(0)(
8
)
z
(0)(
5
)
z
ˆ
(0)(
8
)
z
(0)(
6
)
z
ˆ
(0)(
8
)
z
(0)(
7
)
z
ˆ
(0)(
8
)
M
M
M
M
M
M
M
M
求取W
3及W
4 求取W
3及W
4 求取W
3及W
4 求取W
3及W
4 MGM(1,1) 為一線性組合預測模式,其數學式表示如下:),
)
1
,
1
(
(
)
(
4 4 3 1 n nW
Observed
W
GM
MGM
+=
+
n
≥
5
,
(9) 其中),
)
1
,
1
(
(
)
(
1
n 1W
3Observed
n 4W
4GM
n4MGMO
+=
−+
n
≥
5
,
(10)),
)
1
,
1
(
(
)
(
2
4 4 3 3 1 n n nW
Observed
W
GM
MGMO
+=
−+
n
≥
5
,
(11)),
)
1
,
1
(
(
)
(
3
n 1W
3Observed
n 2W
4GM
n4MGMO
+=
−+
n
≥
5
,
(12)),
)
1
,
1
(
(
)
(
4
n 1W
3Observed
n 1W
4GM
n4MGMO
+=
−+
n
≥
5
,
(13) 3W
:原始數據分配權數 4W
:GM(1,1)4 分配權數 其中 3W
及W
4分配權數和沒有限制 基於欲利用原始數據第一筆至第四筆及GM (1,1)4 動出之預測值進行迴歸,故使用本模式之限制條件 為原數據必須至少八筆。 2.4 基因演算和類神經網路結合(GANN) GA 是一種演算機制最佳化的模式,在不同的研究領域中,曾經嘗試利用 GA 去尋找最佳化的 ANN 架 構,在過去是利用試誤法(Trial and error)的方式以建構 ANN 之基礎架構,包括隱藏層單元數、學習速率 或是權重值等參數。ANN 架構過大,並無法保證可以得到較佳之預測結果,並且可能造成過度學習(Over-fit) 的現象,對於最佳化ANN 架構的選取,目前所提出的方式包括下面幾種方式。(1) 試誤法,嘗試不同的網 路結構參數,直到網路整體表現效能趨向穩定;(2) GA,將 ANN 架構參數編碼化,利用生物演化機制作用, 搜尋最佳網路基本參數;(3) 建構式學習法(Constructive method),根據經驗先隨意建立一組小型之 ANN, 接著直接在網路架構上,加上所需要的單元數,減少電腦嘗試計算的時間,可以大幅降低落入區域最佳解 (Local optimal)的可能性。一般較常用之倒傳遞類神經網路(Back-proporgation neural network, BPNN)在許多的研究領域中,皆 會有學習速率過慢的缺點,探討其原因可以發現,BPNN 之學習機制是將誤差函數之梯度資訊傳回最原始 之輸入訊號來源,利用此一資訊,逐步修正權重修正值,並改善輸出訊號的準確性,即所謂的最陡坡降法 (Steepest gradient method)。但是 BPNN 每一次運算皆相當繁複,影響網路的學習速度 [10]。
本文考慮利用GANN 為其中一種學習方法,包括類神經網路之權重、誤差修正值或是其他一些相關的 網路參數,透過基因演化編碼處理,挑選出最佳的網路參數結構,以符合最適化條件的需求。 綜合上述,透過GA 的演化機制,可以達到網路結構最佳化的目標,並且利用最少的網路結構參數(權 重值、隱藏層單元數等)以求解最佳化問題,大幅降低整個問題的演算流程。也就是在GANN 中,將參數 以二進位之編碼方式,進行GANN 之求解,可以有效的在最短的演算時間內,求得系統之最佳解。 過去曾有學者 [11]針對 BPNN 進行統計上之分析及比較,主要歸納出幾項缺點,包括使用多重線性迴 歸決定網路的輸入變數並不適當等缺點。若利用 BPNN 或是迴歸分析方法進行模式分析,通常會因為資料 型態不同而有不同的計算結果。迴歸分析方法雖然分析方法簡單,但是資料本身若非常態分布(Normal distribution)、函數型態不正確或是樣本數不足等限制,可能就會大幅降低預測的準確度。若是使用 BPNN 進行預測分析,網路結構的大小則會影響其預測能力,若ANN 的結構很大,亦即每一層處理單元的權重值 數目增加,或許非常接近訓練資料的資料筆數,若有這一種現象產生,會造成網路對於訓練資料訓練準確 性高,但是測試驗證的準確性卻降低的問題,也就是所謂的過度學習的現象。 GANN 流程如圖 1,其主要是利用類似生物基因染色體的演化方式,將原本類神經網路架構中,主要 之影響因子,包括隱藏層單元數、轉換函數或是權重等因子,分別以二進位的編碼方式,透過複製、交配、 突變等演化參數的設定,逐漸演化產生一組較能符合外在環境需求的演化個體,若以實際問題來解釋,所 求得之演化個體,其誤差值較低,所得到之數值較能符合題目之需求。
開 始 輸 入 因 子 篩 選 建 立 初 始 亂 數 族 群 執 行 ANN 模 擬 評 估 GA 適 應 性 函 數 是 否 達 到 滿 意 標 準 是 菁 英 適 應 性 值 完 成/輸 出 結 果 新 的 族 群 數 目<母 族 群 大 小 亂 數 選 取 兩 個 染 色 體 利 用 機 率 進 行 交 配 利 用 機 率 進 行 突 變 染 色 體 進 入 新 族 群 否 利 用 複 製 建 立 初 始 族 群 圖1 GANN 流程 [12] 2.4 非線性預測組合模式(NFCMCM 及 NFCMGM) 倒傳遞網路 是目前最具 代表性、應 用最普遍之 監督式學習 演算法。倒 傳遞網路是 利用最陡坡 降法 (Gradient steepest descent method)之觀念,加入隱藏層處理單元,將網路輸出值與期望輸出值間之能量函 數最小化之迭代運算法。由於空氣品質資料本身包含極高之不確定性,應用傳統之預測模式有其限制與困 難,基因類神經網路對於非線性系統識別效能良好,係一種簡易、迅速與準確度高之預測工具。本研究非 線性預測組合模式為利用基因類神經網路(倒傳遞)演算法,以CNM 模式及 MGM 模式預測值當成演算法 之輸入因子,非線性組合成NFCMCM 模式;GANN 模式及 MGM 模式預測值當成演算法之輸入因子,非 線性組合成NFCMGM 模式,以求得非線性組合之輸出預測值。 預測精確度(Forecasting accuracy)為評估預測模式所得預測值與量測值之間的差,亦即預測誤差,為 決定預測模式優劣的一種量度。本文採用均方根誤差(Root mean squared error,RMSE)、平均絕對誤差(Mean
absolute error, MAE)、平均絕對誤差百分比(Mean absolute percent error, MAPE),用以檢測預測值之可信度。 其定義如下:
1.均方根誤差(Root mean squared error,RMSE)
∑
= − = n i c i f i n RMSE 1 2 )) ( ) ( ( 1 θ (14)2. 平均絕對誤差(Mean absolute error, MAE)
n
i
f
i
MAE
=
∑
θ
(
)
−
c(
)
÷
(15)3. 平均絕對誤差百分比(Mean absolute percent error, MAPE)
∑
= − = n i c i i f i n MAPE 1 ( ) ) ( ) ( 1 θ θ × 100. (16) θ(i):量測值 fc(i):預測值 當RMSE、MAE 及 MAPE 值越小,表示預測能力越好。3. 結果與討論
本研究蒐集高雄市環保局過港隧道監測及採樣分析資料,再利用BioComp systems 公司所發展出之軟體 NGO(Neural genetic optimizer)基因類神經網路(倒傳遞)為分析工具進行非線性預測組合模式演算,以 預測縱流式通風系統交通隧道CO 及 NOx空氣污染物並比較其預測能力。 非線性預測組合模式為利用基因類神經網路(倒傳遞)演算法,以CNM 及 MGM 模式預測值當成演算 法之輸入因子,非線性組合成 NFCMCM 模式;GANN 及 MGM 模式預測值當成演算法之輸入因子,非線 性組合成NFCMGM 模式,求得非線性組合之輸出預測值。 基因演算法之演化機制,首先產生一定數量之初始解,接著將題目中之相關參數加以編碼化處理,在 不同的演化機制運作下,找出此一世代中之染色體最佳解。 基因類神經網路之初始架構設計如下:輸入變數向量(Input layer):CNM、MGM 預測值及 MGM、GANN 預測值 輸出變數向量(Output layer):CO 濃度、NOx濃度
隱藏層數(Hidden layer):一層 隱藏層單元數(Hidden neurons):64
轉換函數(Transfer function):雙彎曲函數(Sigmoid function) 突變率(Mutation rate):0.01
選擇率(Crossover):單點交配 族群數(Population):50 演化世代數(Generation):50
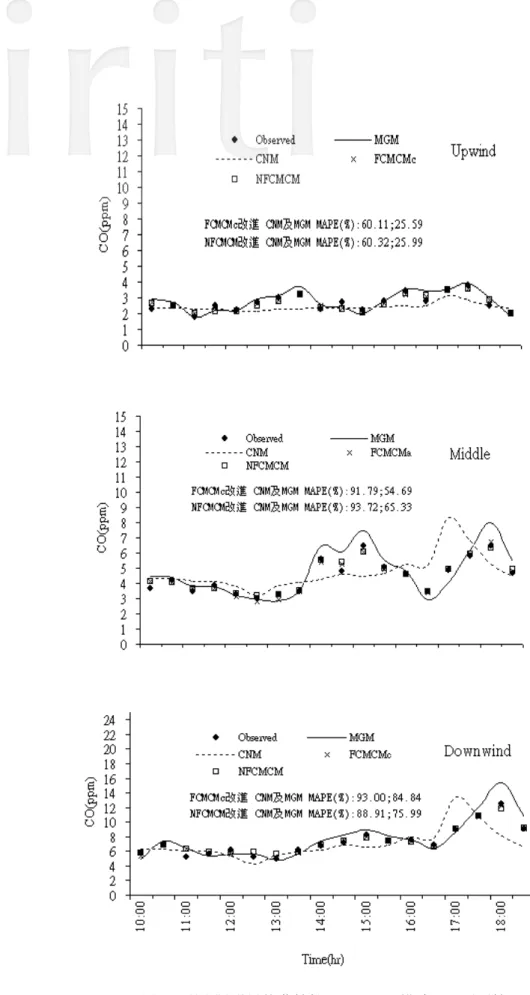
表1 顯示,NFCMCM 預測結果較 CNM、MGM 式得到更準確的結果。由表 2 顯示,16:00 ~ 19:00 三小 時的預測CO 平均濃度值,NFCMCM 改進傳統 CNM 預測模式殘差百分比由 60.32%(MAPE, 上風)至 93.72% (MAPE, 中間)而改進 MGM 預測模式殘差百分比由 25.99%(MAPE, 上風)至 75.99%(MAPE, 中間)。 圖2 可看出 10:00 ~19:00 上風、中間及下風位置的 CO 平均濃度量測值和 NFCMCM 模式預測值匹配相當一 致。
表1 顯示,非線性組合模式 NFCMGM 在整體預測 CO 過程中,無論上、中、下風處殘差皆明顯比單一 模式小。藉由NFCMGM16:00 至 19:00 三個小時之預測其 CO 平均濃度值分別為 0.25(RMSE, 上風, CO)、 0.24(RMSE, 中間, CO)及 0.43(RMSE, 下風, CO);0.17(MAE, 上風, CO)、0.16(MAE, 中間, CO)及 0.30(MAE,下風, CO);5.99(MAPE, 上風, CO)、3.29(MAPE, 中間, CO)及 2.88(MAPE, 下風, CO)。 就NFCMGM 預測模式預測 CO 而言,各位置點的 MAPE 分別為 5.99(上風)、3.29(中間)及 2.88(下風), 顯示下風位置殘差較小。由表 2 顯示,16:00 ~ 19:00 三小時的預測 CO 平均濃度值,NFCMGM 改進傳統 GANN 預測模式殘差百分比由 8.08%(MAPE, 上風)至 75.22%(MAPE , 中間)而改進 MGM 預測模式殘 差百分比由26.26%(MAPE, 上風)至 72.38%(MAPE, 下風)。圖 3 可看出 10:00~19:00 上風、中間及下風 位置的CO 平均濃度量測值和 NFCMGM 模式預測值匹配相當一致。表 1 顯示非線性組合模式 NFCMGM 預 測結果較MGM、GANN 得到更準確的結果。表 1 指出在 10:00 至 19:00 之模擬及預測 CO 平均濃度值,在 1%顯著水準下相關係數(R)值,NFCMCM 及 NFCMGM 模式 CO 平均濃度預測值對量測值皆有高度的相關 性。NFCMCM 模式相關係數(R)值分別為 0.91(上風)、0.98(中間)及 0.98(下風)。同時,NFCMGM 模 式相關係數(R)值分別為 0.91(上風)、0.97(中間)及 0.98(下風)。 表3 顯示 NFCMGM 在整體預測 NOx過程中預測結果較CNM、MGM 及 FCMCM 得到更準確的結果。 由表4 顯示,16:00 ~ 19:00 三小時的預測 NOx平均濃度值,NFCMGM 改進傳統 GANN 預測模式殘差百分 比由11.19%(MAPE, 中間)至 40.46%(MAPE, 上風)而改進 MGM 預測模式殘差百分比由 59.11%(MAPE, 上風)至81.23%(MAPE, 中間)。圖 4 可看出 10:00 ~19:00 上風、中間及下風位置的 NOx 平均濃度量測值 和NFCMGM 模式預測值匹配相當一致。 表3 指出在 10:00 至 19:00 之模擬及預測 NOx平均濃度值,在1%顯著水準下相關係數(R)值,NFCMCM 及 NFCMGM 模式 NOx平均濃度,預測值對量測值皆有中度以上的相關性。NFCMCM 模式相關係數(R)值 分別為0.80(上風)、0.73(中間)及 0.75(下風)。同時,NFCMGM 模式相關係數(R)值分別為 0.91(上風)、 0.72(中間)及 0.91(下風)。 綜合上述,利用基因類神經網路(倒傳遞)演算法,以CNM 及 MGM 模式預測值當成演算法之輸入因 子,組合成非線性 NFCMCM 模式;GANN 及 MGM 模式預測值當成演算法之輸入因子,組合成非線性 NFCMGM 模式,求得非線性組合之輸出預測值。預測結果的確能較 CNM、MGM、GANN 單一模式得到更 準確的結果。由表5 顯示,本研究和 Chelani and Devotta 及 Shi et al.預測模式比較,得到一致的結果。亦即, 非線性組合模式優於線性組合模式,而線性組合模式更勝於傳統的單一模式。
4. 結 論
本研究利用蒐集蒐集高雄市環保局之高雄市過港隧道監測及採樣分析資料,應用NFCM 非線性預測組 合模式預測縱流式通風系統交通隧道CO 及 NOx空氣品質,同時驗證NFCM 非線性預測組合模式執行能力。 本研究所得結論如下: (1) 預測組合模式無論以何種預測,平均而言,非線性預測組合模式均較 CNM、GANN 佳,而 GANN 又 比 CNM 有較小的殘差,原因或許是預測組合融合了兩個理論的有效訊息,所以預測能力最佳;而 GANN 比 CNM 佳的原因為 GANN 經過不斷的學習測試。整體而言非線性組合模式優於傳統的單一模式。 (2) 應用 NFCM 非線性預測組合模式均能準確地預測下一時段 1~3 小時縱流式通風系統交通隧道 CO 及 NOx空氣污染物濃度,則隧道內空氣污染物濃度有超過標準之虞時,能事先啟動動力風扇稀釋隧道內 空氣污染物或採取車輛數、車速管制甚至大小車輛管制措施進入隧道內,以預防隧道內高污染物濃度 值的產生並保持隧道內暢通良好的空氣品質。準確地預測隧道內空氣污染物濃度值,能節省動力風扇 能源,又能防患於未然。因此,本研究能為改善隧道內空氣品質預測提供一個簡單又有效的預測方法 來提高交通隧道內空氣品質預測之準確性。 表1 過港隧道 CO 不同預測模式比較 位置 模 式 RMSE MAE % 總誤差 (10:00-1900)
MAPE R RMSE 預測誤差 MAE % (16:00-19:00) MAPE 上風 CNM 0.49 0.39 13.66 0.62 0.59 0.48 15.16 MGM 0.20 0.16 6.66 0.90 0.25 0.21 8.13 GANN 0.45 0.36 13.23 0.72 0.23 0.21 6.52 非線性 NFCMCM 0.22 0.18 6.98 0.91 0.22 0.18 6.01 非線性 NFCMGM 0.22 0.17 6.52 0.91 0.25 0.17 5.99 中間 CNM 1.19 0.88 19.06 0.45 1.71 1.37 28.86 MGM 0.27 0.23 5.24 0.95 0.31 0.27 5.23 GANN 0.92 0.65 13.79 0.57 0.97 0.65 13.26 非線性 NFCMCM 0.23 0.17 3.74 0.98 0.12 0.09 1.81 非線性 NFCMGM 0.26 0.19 4.34 0.97 0.24 0.16 3.29 下風 CNM 1.74 1.15 14.43 0.63 2.82 2.16 22.58 MGM 1.04 0.80 10.56 0.97 1.48 1.09 10.43 GANN 1.15 0.74 9.63 0.83 1.64 0.84 7.56 非線性 NFCMCM 0.42 0.30 4.79 0.98 0.31 0.24 2.50 非線性 NFCMGM 0.56 0.40 6.34 0.98 0.43 0.30 2.88 表2 過港隧道非線性組合預測模式改善單一模式 CO 預測值之誤差 位置 模 式 改善誤差 (%) MAPE (16:00-19:00) 上風 GANN CNM MGM 非線性 NFCMCM 60.32 25.99 非線性 NFCMGM 8.08 26.26 中間 非線性 NFCMCM 93.72 65.33 非線性 NFCMGM 75.22 37.14 下風 非線性 NFCMCM 88.91 75.99 非線性 NFCMGM 61.89 72.38
表3 過港隧道 NOx不同預測模式比較 位置 模 式 RMSE 總誤差 MAE % 10:00-19:00 MAPE R RMSE 預測誤差 MAE% 16:00-19:00 MAPE 上風 CNM 325.86 294.01 107.73 0.57 311.48 266.66 69.04 MGM 64.10 54.96 23.17 0.75 55.00 49.90 13.31 GANN 48.65 39.11 13.23 0.87 44.54 36.48 9.14 非線性 NFCMCM 60.57 50.57 22.20 0.80 46.04 38.70 10.32 非線性 NFCMGM 43.80 36.78 13.70 0.91 27.10 21.79 5.44 中間 CNM 993.76 907.09 222.74 0.62 1159.67 1032.23 271.32 MGM 85.19 69.46 18.43 0.63 41.00 38.11 11.12 GANN 90.90 69.86 17.40 0.68 12.08 9.22 2.35 非線性 NFCMCM 76.56 61.86 16.20 0.73 28.08 18.11 5.06 非線性 NFCMGM 81.58 64.21 16.44 0.72 13.10 8.03 2.09 下風 CNM 1275.22 1112.34 96.83 0.53 1401.27 1171.27 81.93 MGM 259.26 226.01 21.12 0.68 266.71 234.66 16.40 GANN 176.99 124.52 13.55 0.87 155.84 123.79 8.75 非線性 NFCMCM 256.75 168.59 17.97 0.75 165.33 124.08 8.94 非線性 NFCMGM 154.30 114.57 11.56 0.91 95.28 75.73 5.52 表4 過港隧道非線性組合預測模式改善單一模式 NOx預測值之誤差 位置 模 式 改善誤差 (%) MAPE (16:00-19:00) 上風 GANN CNM MGM 非線性 NFCMCM 85.05 22.46 非線性 NFCMGM 40.46 59.11 中間 非線性 NFCMCM 98.14 54.50 非線性 NFCMGM 11.19 81.23 下風 非線性 NFCMCM 89.09 45.49 非線性 NFCMGM 36.92 66.34
表5 過港隧道本研究和 Chelani and Devotta [13]及 Shi et al. [14]預測模式比較
預測方法(Chelani and Devotta, 2006) MAPE RMSE Rank
單一模式ARIMA 17.30 58.78 3
非線性 11.60 55.37 2
Hybrid model 5.37 13.93 1
預測方法(Shi et al.,1999) MSE Rank
單一模式ARIMA 0.06 3 Brown 0.10 6 Trend 0.11 7 線性組合EW 0.09 5 MV 0.06 4 類神經網路(ANN) 0.05 2 ANN 非線性組合 0.04 1
預測方法(本研究過港隧道) MAPE RMSE Rank
單一模式CNM 15.16 0.59 6 MGM 8.13 0.25 5 線性組合FCMCMa 6.72 0.23 4 FCMCMb 6.68 0.23 3 FCMCMc 6.05 0.22 2 ANN 非線性組合 NFCMCM 6.01 0.22 1 單一模式MGM 8.13 0.25 6 GANN 6.52 0.23 3 線性組合FCMGMa 6.67 0.23 4 FCMGMb 6.69 0.25 5 FCMGMc 6.36 0.22 2 ANN 非線性組合 NFCMGM 5.99 0.25 1
圖4 過港隧道最佳非線性 NFCMGM 模式 NOx預測值
參考文獻
[1] Lin, M.D. and Lin, Y.C., "The application of GIS to air quality analysis in Taichung City,Taiwan, ROC," Environmental Modelling& Software, 17,11–19,2002.
[2] Oettl, D., Sturm, P.J., Bacher, M., Pretterhofer, G. and Almbauer, R.A., "A simple model for the dispersion of pollutants from a road tunnel portal," Atmospheric Environment, 36, 2943-, 2002.
[3] Sharma, P. and Khare, M., " Modelling of vehicular exhausts-a review, "Transportation Research-D, 6,179-198, 2001. [4] Fang, Y., "Forecasting combination and encompassing tests," International Journal of Forecasting, 19, 87–94, 2003. [5] Goyal, P., Chan, A.T. and Jaiswal,." Statistical models for the prediction of respirable suspended particulate matter in
urban cities." Atmospheric Environment, 40, 2068-2077,2006.
[6] Yao, Y., Lian, Z.W., Hou, Z.J. and Liu, W.W., "An innovative air-conditioning load forecasting model based on RBF neural network and combined residual error correction," International Journal of Refrigeration, 29, 528–538,2006. [7] Chelani, A.B. and Devotta, S.," Air quality forecasting using a hybrid autoregressive and nonlinear model," Atmospheric
Environment, 40,1774-1780,2006.
[8] 高雄市政府環境保護局,高雄市隧道及地下道空氣污染物擴散模擬及改善策略研擬-期末報告,2001。
[9] 陳康興、仲崇毅、袁中新、洪崇軒,高雄過港隧道內空氣污染物擴散模擬之研究,15 屆空氣污染控制技術研討會, 1998。
[10] Jun H., Claudio M. and Stefan S., "Optimization of feedforward Neural Network Engen. ." Applic, Artif. Intell. 9 (2), 109-119, 1994.
[11] Chen, C. L., Kaber, D. B. and Dempsey, P.G., "A new approach to applying feedforward neural networks to the prediction of musculoskeletal disorder risk," Applied Ergonomics, 31,269-282, 2000.
[12] Chow, T.T., Zhang, G.Q., Lin, Z. and Song, C. L., "Global optimization of absorption chiller system by genetic algorithm and neural network," Energy and Buildings ,34,103-109,2002.
[13] Chelani, A.B. and Devotta, S.," Air quality forecasting using a hybrid autoregressive and nonlinear model," Atmospheric Environment, 40, 1774-1780, 2006.
[14] Shi, S.M., Xu, L.D. and Liu, B., "Improving the accuracy of nonlinear combined forecasting using neural networks," Expert Systems with Applications, 16,49–54. 1999.


![表 5 過港隧道本研究和 Chelani and Devotta [13]及 Shi et al. [14]預測模式比較](https://thumb-ap.123doks.com/thumbv2/9libinfo/8831358.235406/15.892.78.808.143.831/表5過港隧道本研究和ChelaniandDevotta13及Shietal14預測模式比較.webp)

