科技部 GRB 編號:PG10802-0133
早期火災探測預警人工智慧技術與
消防救災結合應用研究
受
委
託
者
中華大學
研 究 主 持 人
游坤明
協 同 主 持 人
陳昀暄
研
究
員 徐煥博
研
究
助
理 劉鍾興
研
究
期
程 中華民國 108 年 2 月至 12 月
研
究
經
費 新臺幣 131 萬 7 仟元
內 政 部 建 築研 究 所 委託 研究 報 告
中華民國 108 年 12 月
(本報告內容及建議,純屬研究小組意見,不代表本機關意見)目次
目次
目次 ... I
表次 ... III
圖次 ... V
摘 要 ... XI
第一章 研究方法及進度說明 ... 1
第一節 研究緣起與背景 ... 1
第二節 研究方式 ... 2
第二章 蒐集之資料、文獻分析 ... 7
第一節 人工智慧探討 ... 7
第二節 物聯網 ... 10
第三節 藍牙技術探討 ... 16
第四節 室內定位探討 ... 17
第五節 機器人探討 ... 19
第三章 極早期火災感知 ... 23
第一節 人工智慧演算 ... 23
第二節 燃燒實驗規劃 ... 25
第二節 燃燒實驗資訊 ... 48
第三節 人工智慧預測 ... 67
第四章 機器人資訊彙整 ... 71
第一節 消防機器人 ... 71
第二節 機器人與建築分類 ... 76
第三節 代表性機器人使用定位 ... 79
第五章 藍牙與定位技術 ... 82
第一節 藍牙定位架構 ... 82
第二節 室內定位技術 ... 86
第六章 結論與建議 ... 92
第一節 結論 ... 92
第二節 本計畫研究建議 ... 94
參考資料 ... 97
附錄一 採購評選會議紀錄審查意見及回應表 ... 97
附錄二 工作會議記錄 ... 101
附錄三 相關文獻發表與研究成果 ... 131
參考書目 ... 137
表次
表次
表 1- 1 計畫進度規劃時程表 ... 5
表 2- 1 人工智慧發展史簡表 ... 7
表 3- 1 感測元件一覽表 ... 30
表 3- 2 感測模組一覽表 ... 31
表 3- 3 CO+H2S 預測結果表 ... 69
表 3- 4 CO+H2S+TEM 預測結果表 ... 69
表 3- 5 CO +H2S+TEMP+NO2 預測結果表 ... 69
表 3- 6 CO +H2S+TEMP+NO2+NH3 預測結果表 ... 70
表 4- 1 代表性早期偵蒐機器人列表 ... 72
表 4- 2 代表性滅火及影像傳輸機器人列表 ... 73
表 4- 3 代表性救援機器人列表 ... 75
表 4- 4 代表性特殊類型機器人列表 ... 75
表 5- 1 藍牙規格表 ... 82
圖次
圖次
圖 1- 1 計畫研究進度流程圖 ... 4
圖 2- 1 人工智慧發展關係 ... 8
圖 2- 2 生物神經元結構圖 ... 9
圖 2- 3 人工智慧概念表示圖 ... 10
圖 2- 4 物聯網三層架構 ... 11
圖 2- 5 Arduino UNO R3 ... 12
圖 2- 6 Raspberry pi(樹莓派) ... 13
圖 2- 7 AppsBee ZigBee 2.4G(CO) ... 13
圖 2- 8 溫度感測器 ... 14
圖 2- 9 MQ136 感測器 ... 14
圖 2- 10 Multichannel Gas 感測器 ... 15
圖 2- 11 NAP-505M 感測器... 15
圖 2- 12 MH-Z19B 感測器 ... 16
圖 2- 13 室內定位示意圖 ... 18
圖 2- 14 滅火、排煙消防機器人 ... 21
圖 2- 15 消防無人機 ... 21
圖 2- 16 浮空消防機器人 ... 22
圖 3- 1 人工智慧數據處理流程圖... 24
圖 3- 2 機器學習模型圖 ... 25
圖 3- 3 Multichannel Gas Sensor 實際連接圖 ... 27
圖 3- 5 CO Sensor 實際連接圖 ... 28
圖 3- 6 CO2 Sensor 實際連接圖 ... 28
圖 3- 7 溫度感測器實際連接圖 ... 29
圖 3- 8 資訊叢集協調端實際連接圖 ... 29
圖 3- 9 樹莓派 4G 模組連接圖 ... 30
圖 3- 10 IoTtalk 輸入、輸出設備功能圖 ... 32
圖 3- 11 IoTtalk 設備連接圖 ... 33
圖 3- 12 IoTtalk 設備註冊圖... 34
圖 3- 13 數據型態表示圖 ... 35
圖 3- 14 感測器資訊傳輸流程圖 ... 35
圖 3- 15 樹莓派資訊傳輸流程圖 ... 36
圖 3- 16 伺服器端資訊傳輸流程圖... 36
圖 3- 17 實驗場所室內平面圖 ... 38
圖 3- 18 實驗系統架構圖 ... 38
圖 3- 19 實驗場所配置圖 ... 39
圖 3- 20 感測器位置配置圖 ... 40
圖 3- 21 感測模組線路規劃圖 ... 42
圖 3- 22 勘察場地整體結構 ... 43
圖 3- 23 勘察內部空間規劃 ... 43
圖 3- 24 場勘天花板上方可進行架設空間 ... 44
圖 3- 25 感測模組預定架設位置 ... 44
圖 3- 26 天花板上方電源延長方式... 45
圖 3- 27 主板接電運作與隔熱防護... 45
圖次
圖 3- 28 動力線佈設 ... 46
圖 3- 29 感測器架設施工過程 ... 46
圖 3- 30 感測模組架設完畢實際運作情形 ... 47
圖 3- 31 感測模組更換與測試 ... 47
圖 3- 32 熱顯像儀架設 ... 48
圖 3- 33 紅外線攝影機架設-1 ... 49
圖 3- 34 紅外線攝影機架設-2 ... 49
圖 3- 35 場域燃燒後之感測模組 ... 50
圖 3- 36 場域燃燒後之天花板空間... 50
圖 3- 37 場域燃燒後之主板供電設備 ... 51
圖 3- 38 陶瓷棉隔熱措施 ... 51
圖 3- 39 燃燒後場域拍攝圖 ... 52
圖 3- 40 熱顯像儀設備設定 ... 52
圖 3- 41 紅外線攝影機畫面測試 ... 53
圖 3- 42 燃燒實驗事前說明-1 ... 53
圖 3- 43 燃燒實驗事前說明-2 ... 54
圖 3- 44 燃燒實驗感測器架設圖 ... 54
圖 3- 45 燃燒實驗溫度變化圖 ... 55
圖 3- 46 燃燒實驗 CO 變化圖 ... 55
圖 3- 47 燃燒實驗 CO2 變化圖 ... 56
圖 3- 48 燃燒實驗 NH3 變化圖 ... 57
圖 3- 49 燃燒實驗 NO2 變化圖 ... 57
圖 3- 50 燃燒實驗 H2S 變化圖 ... 58
圖 3- 51 影像擷取卡 ... 59
圖 3- 52 攝影機拍攝圖-火勢成長 ... 59
圖 3- 53 攝影機拍攝圖-煙流 ... 60
圖 3- 54 攝影機拍攝圖-滅火 ... 60
圖 3- 55 熱顯像儀拍攝圖-火勢初期 ... 61
圖 3- 56 熱顯像儀拍攝圖-火勢後期玻璃遮擋... 61
圖 3- 57 紅外線攝影機拍攝圖-火勢初期遮擋... 62
圖 3- 58 攝影機拍攝圖-火勢初期 ... 62
圖 3- 59 紅外線攝影機拍攝圖-火勢後期遮擋... 63
圖 3- 60 紅外線攝影機拍攝圖-火勢成長 ... 63
圖 3- 61 紅外線攝影機拍攝圖-火勢初期 ... 64
圖 3- 62 紅外線攝影機拍攝圖-火勢後期不受遮擋 ... 64
圖 3- 63 紅外線攝影機拍攝圖-前期側窗拍攝... 65
圖 3- 64 熱顯像儀拍攝圖-火勢前期 ... 65
圖 3- 65 熱顯像儀拍攝圖-火勢後期效果良好... 66
圖 3- 66 攝影機拍攝圖-前門 ... 66
圖 3- 67 攝影機拍攝圖-側窗 ... 67
圖 4- 1 極早期偵蒐適用機器人類別 ... 77
圖 4- 2 燃燒時期適用機器人類別... 77
圖 4- 3 災後救援適用機器人類別... 78
圖 4- 4 The Fire Fighting robot COLOSSUS ... 79
圖 4- 5 Aerones firefighting drone ... 80
圖次
圖 4- 7 Arduino Based Autonomous Fire Fighting Robot ... 81
圖 5- 1 tracMo、tracMo Leaf 雙向藍牙追蹤器 ... 83
圖 5- 2 tracMo Station ... 83
圖 5- 3 藍牙定位架構圖 ... 84
圖 5- 4 RSSI 伺服器流程圖 ... 85
圖 5- 5 RTLS 系統流程圖 ... 86
圖 5- 6 三點定位概念圖 ... 89
圖 5- 7 室內定位系統截圖 ... 90
圖 5- 8RSSI 數值圖 ... 90
圖 5- 9 室內定位系統截圖 ... 91
摘要
摘 要
關鍵字:物聯網、室內定位、機器人、智慧避難技術、人工智慧一、研究緣起
近年來,我國在消防救災方面,對於第一線人員的安全部分,一直希望有更進一 步的防護,在執行勤務上,資訊不對等造成火場安全疑慮的情況,對於救難人員一直 是無法跨越的門檻,因此我們期許在早期探知與避難監控的方面,規劃一套運用人工 智慧技術並有助於消防救災應用之系統,使其整合物聯網平台,連結終端設備,達成 即時性的資訊探知,完成數據監控與分析,並於必要時給予使用者警示,有效提升環 境監控安全成效;結合藍牙室內定位技術、人工智慧演算法以及雲端系統資訊統合, 強化系統運作效能,給予即時性的避難導引,並將期感測器部分之數值紀錄儲存至資 料庫,後續提供大數據探討,便可透過人工智慧分析判讀事件發生情形,提供分析結 果,給予使用者做為避難逃生甚至是救援行動的重要依據,也可提供智慧化避難協助, 在不同地區、建材、樓層、起火範圍之情況下,分析各類型機器人對於各場域之搜查 與救援能力,進行合適之機器人輔助運用。二、研究方法及過程
本研究主要為研擬出一套複合式人工智慧避難引導系統,致力於早期室內環境特 定氣體與溫度偵測,利用無人斥候方式透析火場資訊,本系統預計進行實際環境驗證 方式,於室內空間進行燃燒實驗,透過火災初期的實際案例,蒐集記錄並且探討回傳 之數值,分析偵測結果對於火勢延伸範圍或室內避難路線等影響,以及結合以下子系 統完成系統初步建置,分別為: 環境感知:傳感模組、人流監控系統 雲端平台:資料庫系統、乙太通訊系統避難逃生:數位電子看板、聲光避難引導系統 人工智慧:人工智慧模組、演算工程分析 本研究擬採用下列方式整合子系統且達成早期透析火場資訊,以增進救難人員救 災安全性之目標: 1.資料技術分析法: 採用次級資料分析法,分析國內外相關文獻資料,提供與本研究主題相關領域知 識,以剖析火場安全發展、避難逃生引導、即時監測系統、人工智慧輔助等資訊應用。 2. 模組系統構建: 本研究系統分類成四類可獨立運作之子系統:(1) 透過環境感知蒐集現場環境資 訊,取得人員數量位置;(2) 透過雲端平台記錄場域資訊和對外通訊等事項,以及提 供聯網裝置必要之資源;(3) 避難流程結合數位電子看板以及聲光避難引導系統,提 升避難人員注意力更為清楚避難路線及方向,避免空間迷航;(4)將資訊整合至人工智 慧探勘系統,自動化偵測場域變化,統合已知資訊,透過智能分析演算,計算出最佳 避難路線。 3. 系統整合與實測: 結合各模組系統,解決相容問題,整合出一套複合式火災預警導引系統,並進行 情境模擬,確保整合之系統運行正常,在透過實地演練觀察運行狀況,最後統整問題 完成細部修正。 4. 專家學者座談方式: 邀請相關議題之專家學者,對本研究過程與成果進行審視,給予技術改進方向與 專業建議。
三、研究發現
本研究擬完成一套複合式人工智慧避難引導系統,為使此系統可以在實際場域中 正常運作,並有基本的穩定性與正確率,過濾掉誤報等不正確因素;透過建築研究所摘要 之燃燒實驗,藉由燃燒實驗的實際場域模擬,蒐集可貴的實際火場數值變化,並利用 系統中的物聯網平台,將這些燃燒實驗之數值變化情形,系統式的從終端感測設備利 用 zigbee2.4G 將所有 ZigBee RO 端感測器資訊傳輸至資訊叢集協調端(CO 端),數據蒐 集叢集系統組成為 Raspberry Pi 3B +、可連網之行動或無線網路、Arduino UNO R3、 ZigBee 2.4G Module(AppsBee CO),將回傳之資料運用 Raspberry Pi 中的 Python 方式進 行資料上傳,將所有資訊傳回至 IoTTalk 中,讓伺服器端能夠藉由平台將其資料進行 數據儲存下載,並根據使用者需求,將所需資訊依照需求之不同,以不同單元的資訊 性質分別下載。 物聯網平台 IoTtalk 整合構建時預期可達成之效益包含能以系統化方式來管理終 端設備,快速建立一個甚至多個的設備模型(Device Model),並可隨時依照需求建立設 備之間的連接與移除,對於本次實地場域實驗之研究,將會運用眾多數目的感測器建 置專案的情況而言,是相當便利的事情。 室內定位設備,經由藍牙裝置相互連線,構建出應用於室內環境定位之即時定位 系統(Real-Time Location System,RTLS),並透過行動網路或是可連網之裝置,抓取網域 內的訊號資源,藉由蒐集訊號強度及其處理伺服器進行即時訊號處理,並利用最新藍 牙技術,增進連線品質。 本研究擬完成一套複合式人工智慧避難引導系統,並針對坊間消防、救災機器人 進行分類研究。坊間消防、救災機器人以多功能性為主,但同時也因為各種類機器人 功能各有特性,因此分析其相對應的功能,便可大幅增加特定場域的執行效率運作效 率。目前預期可將消防運用劃分為極早期偵蒐、燃燒前期、燃燒猛烈期、災後救援等 四階段,並針對各階段選擇合適之機器人,後續對於消防單位進行救災演練時,也可 對於各類型建築場所,採用合適之機器人,將機器人功能之使用發揮最大效益。
四、研究建議事項
本研究經過十一個月縝密的資料蒐集、研究與系統開發建置,對於本計畫提出下 列建議:建議一 辦理智慧物聯網平台及複合式火災感知系統技術應用研究:立即可行建議 主辦機關:內政部建築研究所 協辦機關:中華大學 本計畫建議使用物聯網平台進行整合的方式,將多元感知模組收集到的實際數值 進行分類整合並套入至系統,在進行傳輸、上傳與下載數據的過程中,數據都可即時 且準確的寫入資料庫,對於未來更大量資料的即時收集,將具有實質的應用協助。 建議二 辦理人工智慧應用於消防安全科技推廣工作:立即可行建議 主辦機關:內政部建築研究所 協辦機關:內政部消防署、中華大學、財團法人台灣建築中心、中華民國全國建築師 公會、中華民國消防設備師公會全國聯合會 本所將於 109 年辦理之「108 年度建築研究成果發表講習會」、「2020 前瞻建築防 火科技研討會」進行人工智慧與消防科技有關專題報告,以推廣應用。 建議三 申請早期火災人工智慧分析預警相關專利:中長期建議 主辦機關:內政部建築研究所 協辦機關:中華大學 人工智慧演算方式之成效,經由機器學習進行火災分析,預期可判斷起火區域, 並經由火災場域資訊蒐集計算出火勢蔓延範圍,也可分析數值變化,將各式不同火災 數據依照其分類法則進行分類,並可考量相關建材、建築結構設計,配合消防專業建 議,故可考量對於新型火災預警技術之專利申請。 建議四
摘要 主辦機關:內政部消防署 協辦機關:行政院災害防救辦公室、內政部建築研究所、中華大學 1. 本研究對各類型機器人在各式場合可做出的貢獻進行探討,研究不同類型機器人適 合提供的幫助成效,將各式機器人進行功能類別方面之區分,並將災害發生之時間 軸加以分類,使各功能之機器人對於各時間點之貢獻程度加以評估,幫助消防救災 人員對於消防機器人使用效益多一些瞭解,以利於後續增加機器人進行火場極早期 探勘等工作,盡可能減少第一線人員面對危險的機會。
第一章 研究方法及進度說明
第一章 研究方法及進度說明
第一節 研究緣起與背景
壹、研究緣起
隨著現今科技的發展,各項技術的進步,各種工作的規劃與執行都朝向更有效率 的方向邁進,當然也包括了建築工法,在建築結構上不斷創新發展,對於建材的選用 上也會因地制宜,然而在所有的室內空間中,避難逃生的規範,也成為建物完工中不 可或缺的一環,政府部門也馬不停蹄的修訂相關辦法,對於避難逃生方面希望能減少 事故對於人身安全的危害;在現實生活中,我們可能會經歷各式各樣不同的災害,而 火災對於室內空間的危害,是我們避之而唯恐不及的,倘若不幸遭遇到無法處理的火 勢,需出動救難人員進行搶救時,第一線救難人員的人身安全是我們現在必須優先考 量的重點問題之一。 現今救災人員面對火場所遭遇到的危難狀況,也隨著社會發展型態的改變,使火 災的樣式跟著複雜化,假使火勢出現在鐵皮工廠、化學廠房、廢棄物地下室,這些空 間充斥著各種不確定的物質,使災害環境更加險峻,又或是加上閃燃、空間迷航等意 外事件,將會使人員所承受傷害之更為嚴重。 鑑於上述觀點,為能使消防人員安全更加提升,增加受困人員避難成功率,使得 災害現場資訊能更透明化,本研究研擬一套「複合式人工智慧避難引導系統」,藉由無 人探知方式,提早獲取各式場域中之資訊,把握避難逃生的黃金時間,在火勢發生之 早期情況下,予以示警,藉由子系統中環境感知的多元感知模組與藍牙模組進行場域 監控與人流監控,給予系統即時的場域數據,並經由物聯網平台進行裝置之間的整合, 將資料純化,藉由系統化管理設備,將資訊分門別類紀錄,隨時記錄的場域數值變化, 經由資訊傳遞交由系統判讀,對此數據進行人工智慧演算,得出避難規劃可參考之依 據,對於火勢大小可進行區別,歸類火勢嚴重程度,對於起火位置以及延燒程度將能 更進一步的預測與瞭解。 火場環境中存在著諸多不確定因素,對於環境中端感測設備的運用方式,以及實質能運作的程度,是否對於整合平台或是主系統判讀出現錯誤的判斷,這些問題將會 在本研究中進行實地的場域驗證,並於後續對於可能出現之問題,進行設備方面以及 技術方面之探討。 對於災害發生時的應變,往往透過指揮官專業的判斷,再經由第一線救難人員的 衝鋒陷陣才得以完成,但每當有危急狀況發生,首當其衝的便是這些救難人員。如能 對現有的救災、消防機器人進行分析,使專業人員對機器人多一些瞭解,將第一線任 務交由機器人取代,便可大幅減少人員面對危險的機會。
貳、研究目的
本研究「早期火災探測預警人工智慧技術與消防救災結合應用研究」,是針對場域 環境狀態偵測,終端設備資訊系統化管理與即時性人工智慧演算工程之綜合研究。為 研究複合式人工智慧避難引導系統對於實際環境中的應用,本研究將複合式人工智慧 避難引導系統之多元感知模組裝設於實際場域中進行系統驗證與測試並進行探討。 為達成以上研究目的,早期火災探測預警人工智慧技術與消防救災結合應用研究 進行個技術方向之研究探討,使系統架構更加完善,改善系統在實地場域進行系統驗 證時的運作,整合上述本研究重點可歸納如下: 1. 提升物聯網平台整合終端感測設備之穩定性與應用性。 2. 探討複合式人工智慧避難引導系統應用於實際環境之狀況。 3. 探討機器人對於各式火場建築與建材差異,所能提供之協助。 4. 透過智慧型雲端平台使系統能進行高效率的資訊傳遞。第二節 研究方式
本研究主要為測試「複合式人工智慧避難引導系統」針對室內環境數值測量室內 定位情形進行人工智慧演算,運用最新的物聯網整合平台以及多元性的環境感知設備, 佈建環境無線(或有線)感知系統以強化環境狀態監控。本研究透過平台管理以及蒐集 感知設備之資訊與狀態進行純化與接收,並將運算過後之有效資訊傳送至指揮室或防第一章 研究方法及進度說明 火管理人。利用行動裝置提供消防人員火災發生後的第一手消息。再將整合室內火災 避難引導技術及人工智慧即時分析演算技術,以建構最佳化智慧探測模組,提供極早 期火災探測(Very Early Fire Detection)技術協助室內環境預警通報及火源探知,並引導 避難人員迅速疏散。 蒐集而來的資料可加以研究分析,將各設備接收之溫度氣體,使用正規化方式整 理,挑選對於消防研究方面影響較為深刻之氣體,進行人工智慧分析,使用機器學習 方式,讓系統進行模擬判斷是否有火災發生,達成早期火災預警之功效。
壹、研究方法
本研究主要宗旨是讓「複合式人工智慧避難引導系統」於實際環境中應用狀況進 行探討以及煙霧環境下人流技術無法識別之解決辦法,為達以上目標,本研究擬採用 多元研究方法: 1.資料技術分析法: 採用次級資料分析法,分析國內外相關文獻資料,提供與本研究主題相關領域知 識,以剖析火場安全發展、避難逃生引導、即時監測系統、人工智慧輔助等資訊應用。 2. 智慧分析與數據蒐集 運用感知模組測量場域環境中所需之感測資訊,對於驗證火場火勢發展之進行、 進行火場溫度與氣體變化之差異,嘗試使用人工智慧技術進行各式火災情景分析,作 為火點探知,早期火災情境探測之研究分析。 3. 模組系統構建與整合: 本研究系統分類成四類可獨立運作之子系統,透過環境感知蒐集現場環境資訊, 取得人員數量位置。透過雲端平台記錄場域資訊和對外通訊等事項,以及提供聯網裝 置必要之資源。結合各模組系統,解決相容問題,整合出一套複合式火災預警導引系 統,並進行情境模擬,確保整合之系統運行正常,在透過實地演練觀察運行狀況,避 難流程結合數位電子看板以及聲光避難引導系統,提升避難人員注意力更為清楚避難 路線及方向,避免空間迷航。整合為人工智慧探勘系統,自動化偵測場域變化,統合已知資訊,透過智能分析演算,計算出最佳避難路線,最後統整問題完成細部修正。 4. 專家學者座談方式: 邀請相關議題之專家學者,對本研究過程與成果進行審視,給予技術改進方向與 專業建議。
貳、研究進度流程表
圖 1- 1 計畫研究進度流程圖 (資料來源:本研究自行繪製)參、進度說明
本研究依照規劃時程已完成如表「相關文件蒐集與探討」、「系統架構規劃」、「全第一章 研究方法及進度說明 與整合」、「人工智慧系統建置與整合」、「藍牙連結設備建置與整合」之工作項目。「專 家學者座談」、「系統實地測試驗證」、「系統演算修正」、「期末報告」工作項目亦照預 定時程進行。計畫執行進度及工作項目符合預定進度。 表 1- 1 計畫進度規劃時程表 月次 工作項目 第 1 個 月 第 2 個 月 第 3 個 月 第 4 個 月 第 5 個 月 第 6 個 月 第 7 個 月 第 8 個 月 第 9 個 月 第 10 個 月 第 11 個 月 備 註 1.相關文件蒐集 與探討 2.系統架構規劃 3.全方位避難引 導系統建置 4.模組化架構規 劃與建置 5.期中報告 6.物聯網平台建 置與整合 7.人工智慧系統 建置與整合 8.藍牙連結設備 建置與整合 9.專家學者座談 10.系統實地測試 驗證 11.系統演算修正 12.期末報告 13.成果報告 預 定 進 度 ( 累 積 數 ) 13 26 38 45 57 64 70 82 93 96 100 說明:1.工作項目請視計畫性質及需要自行訂定,預定研究進度以粗線表示其起訖日期。 2.預定研究進度百分比一欄,係為配合追蹤考核作業所設計。請以每 1 小格粗組線 為 1 分,統計求得本計畫之總分,再將各月份工作項目之累積得分(與之前各月 加總)除以總分,即為各月份之預定進度。 3.科技計畫請註明查核點,作為每 1 季所預定完成工作項目之查核依據。 已完成事項、 目前進行、 尚未進行 (資料來源:本研究自行繪製)
第二章 蒐集之資料、文獻分析
第二章 蒐集之資料、文獻分析
複合式人工智慧避難引導系統為一套以智能感知為基礎之動態避難引導平台,經 由平台式整合技術輔助,提供後端整合,最後經由人工智慧演算,獲得相關資訊之整 合性應用平台,為達成上述目的,本團隊對於以下各大技術概念,蒐集了與本研究相 關的文獻,進行了專業文獻資料之分析與探討,以利於研究上對於系統應用時相關的 可行性與準確性加以佐證,解決實驗上所遭遇的相關問題。第一節 人工智慧探討
1950 年代圖靈(Alan Turing)提出了著名的圖靈測試(Turing test),說明機器擁有智 慧 的 可能 , 1951 年馬文閔斯基(Marvin Minsky) 構建了第一個人工神經網路機器 (SNARC),奠定了人工智慧的基礎。直到 2010 年代機器學習(Machine learning)的躍進, 使人工智慧浪潮再次興起,相關人工智慧發展史簡表,如表 2- 1。 表 2- 1 人工智慧發展史簡表 時間 代表性技術 開發成果 結果 第一次浪潮 1950~1980 年代 遺傳演算法 (Genetic algorithm) MIT 建立第一個 對話程序 ELIZA 計算能力有限,機器 的語言理解模糊,無 法解決實用問題。 第二次浪潮 1980 年代 專家系統 (Expert system) MYCIN& XCON 等 專家系統 系統透過特定程序回 答,開發與成本過 高,因此應用與商業 價值有限。 第三次浪潮 2010 年至 今 機器學習(Machine learning) 經深度學習訓練 的 AlphaGo 網路、硬體較為成 熟,可透過類神經網 路來進行高度計算的 深度學習。 (資料來源:本研究自行繪製) 1950 年代各方趨之若鶩的透過電腦來解決數理邏輯推導的問題,60 年代的應用都 以 True 與 False 來的邏輯來理解,應用的面相以數理之證明為主,後續十來年由於都 沒有重大的突破,又受限於硬體上有速度較慢又有限制的處理,因此遇上了發展的瓶 頸,應用方面相較於先前寄託在人工智慧上,幫助處理許多困難問題的方面,也並沒
有想像的順利且廣泛,並無法解答原先就不知道的問題。
1980 年代統計思維中量化的概念替人工智慧的發展找到了另一線生機,透過演算 法使得機器能從大量歷史數據中學習規律,從而對新的樣本做智慧辨識或對未來進行 預測,導入統計思維的量化概念,形成統計學+機率+程式的機器學習。機器學習常見 的演算法又可再分為:監督式學習(Supervised Learning)、非監督式學習(Unsupervised Learning)、半監督式學習(Semi-supervised Learning)、增強式學習(Reinforcement Learning)等方式,應用也相當廣泛,例如:預測需求、自然語言處理、證券分析、 視覺辨識、語音識別、手寫識別等等。後期由於硬體運算能力也大幅提升,機器學習 對於語音辨識與影像辨識的演算能力也隨之增強,應用的領域也越來越廣,進而把多 層類神經網路正式命名深度學習(Deep learning),使用 GPU 作為資源計算,進而提升 10 倍以上的計算速度 (林大貴, 2017),相關整理如圖 2- 1 所示。 圖 2- 1 人工智慧發展關係 (資料來源:TensorFlow+Keras 深度學習- 人工智慧實務應用。林大貴。博碩文化) 機器學習基本上是讓電腦利用已有的資料,得出了某一種模型,並利用這些模型 預測未來的一種方法,強調讓機器自我學習,藉由資訊的蒐集與演算法的改進,讓機 器可以吸收知識,自我學習,並根據學習的成果或預測的準確性修正與反饋,不斷提 升機器的智慧,透過從過往的資料中學習並找到其運行規則,從母體資料中找到的樣 本資料,並透過樣本資料訓練機器辨識出運作模式,而不是用特定的規則編寫運作模 式,最後達到人工智慧的成效。 歸功於硬體成本的下降以及運算能力的增強,使大量數據可以經由機器學習來做 處理,使電腦自行從資料中進行分析。深度學習為機器學習的一個分支,源自於類神
第二章 蒐集之資料、文獻分析 蒐集大量的資料至電腦進行學習運算,後續得以讓電腦依照先前學習的資訊來做後續 資料的判讀;類神經網路的概念源自模擬人類大腦神經系統的運算模型,透過層層連 接的神經元(Neuron),建立傳導的模型,以推論資訊從輸入(Input)到輸出(Output)的過 程,而類神經網路的研究,已有 50 餘年的歷史,早在 1943 年,心理學家 McCulloch 及數學家 Pitts 合作提出了 M-P 模型,即所謂的「形式神經元」的數學模型,神經科學 理論的研究從此展開,往後也有許多的科學家與工程師相繼投入此一領域的研究,例 如在 1949 年 Hebb 提出改變神經元連接強度的 Hebb 規則、在 1957 年 Rosenblatt 引進 了感知器 (Perceptron)的概念、在 1962 年 Widrow 均自適應線性元件等,諸多研究都 為類神經網路領域的研究奠定下重要的基礎。
類神經網路是參考生物神經系統的結構,神經網路系統提供知覺輸入(Sensory Input)、整合 (Integration)、動作輸出(Motor Output) 等三大功能,神經元(Neuron)是構 成神經系統的基本單元,各個神經元之間互相連結,由外部神經元接收信號,再層層 傳導至其他神經元,最後作出反應的過程。神經元結構的運作由神經元的信號輸入開 始,樹突(Dendrites)可從周圍接受其他神經元所傳入的信號,且每個樹突都能夠計算訊 號與該樹突權重值相乘的結果,再由掌管神經元信號輸出的軸突(Axon)作為連接到其 他神經元的信號輸出端子,最後透過突觸(Synapse)這個連接神經元的介面,進行神經 元之間訊息的傳遞 (SeungSub, Jehun, Hyunjung, Soyeon, & Jinho, 2017),其神經元結構 圖如圖 2- 2 所示。
圖 2- 2 生物神經元結構圖
目前已有研究單位及企業進行消防機器人之研發,希望能透過感知裝置或經由程 式完成類似人類的偵查動作,在不經過人工勘察的情況下,透過智能演算方式(圖 2- 3), 預判情境發生方向,使我們能有可參考之資訊,來獲取更多反應時間。透過人工智慧 技術,在室內空間流暢移動,模擬巡邏勤務,觸發特殊情況時自動辨識遭遇情況,以 自動化的方式進行資料傳遞或是救災引導等工作。 圖 2- 3 人工智慧概念表示圖 (資料來源:本研究自行繪製)
第二節 物聯網
物聯網技術,Internet of Things(IoT),為一種無線網路技術,透過網際網路或是電 信網路等資訊載體,將各種資訊感測設備,如藍牙與紅外線等感測器、無線射頻辨識 裝置(RFID)、WiFi、全球定位系統等種種裝置,與網際網路結合起來所形成的一個巨 大網路,使他們達成聯網以及溝通等目的。IoT 技術的應用範圍十分廣泛,例如各個 裝置在經過連結過後,可透過此技術查詢裝置之具體位置、接收回傳數據等資料,由 伺服端電腦進行蒐集,並儲存整合為巨量資料,可再利用這些大數據資訊進行分析, 達成早期人力無法取得大量且精確資料的進步 (周碩彥, 2015)。GS1/EPC global 的前身,麻省理工學院 AutoID 實驗室(MIT AutoID Lab)在 1999 年時提出被稱為 EPC 系統架構的 IoT 技術構想。EPC(Electronic Product Code)被提出 以 RFID 為基礎的 IoT 應用服務,由許多 RFID Reader 與 RFID tag 連結後端系統和網 際網路組成,傳送掃描之 RFID 資訊給後端,儲存資料後再透過網路加密傳送,完成 共享資料,使物品資訊可被標準化。以全球性 RFID 為基礎的物品識別系統 EPC Global Network 其全名為”Electronic Product Code Global Network”,取代原本的 UPC
第二章 蒐集之資料、文獻分析 (Universal Product Code)統一商品條碼,減少不同物流間資料的不流通,免去大量的人 力成本 (Biswas & Giaffreda, 2014)。
歐洲電信標準協會 European Telecommunications Standards Institute (ETSI)將 IoT 劃 分為感知層、網路層與應用層共三層架構,其分類整理圖如圖 2- 4,感知層為技術發 展的基礎,包括 RFID、無線傳感網路(Wireless Sensor Network, WSN)、嵌入式技術 (Embedded Intelligence),可針對環境的物理或者狀況進行監控,並可接受遠端操作、 設定、管理或控制,與大量支援網路節點等特性。網路層分為無線的電信與數據網路, 以及使裝置與裝置間得以互相溝通的網路協定,由於各個設備都有各自的網路協定, 會造成頻段被佔用或無法溝通等問題而無法使用;再加上雲端計算(Cloud Computing), 把各個端點設備串聯起來,讓雲端電腦查詢、儲存、運算各裝置使用的數據,減少各 個裝置的硬體設置成本。應用層則是物聯網與各專業技術的整合,針對不同狀態與蒐 集到的不同資訊進行有效性分析與評估,或收集來自每一個裝置或設備之感測器的數 據資料,進行業務邏輯分類與分析判斷,並且提供相關的服務,並依照感知設備的數 據,變化各種使用方式,結合不同功能達成使用者的需求 (Hada & Mitsugi, 2011)。
圖 2- 4 物聯網三層架構
(資料來源:本研究自行繪製)
機器對機器通訊 (M2M, Machine to Machine)旨在裝置與裝置間能直接透過網路 進行通訊交流,不需透過人為干涉的一種系統模式,為物聯網主要應用方式之一,應 用於無線通信網路,使一個集中器(Concentrator)作為數據的轉發器,透過智能電表 (Smart meter)蒐集、儲存數據封包,再由 M2M 閘道(Gateway)開始發送數據封包至基地 台(Base station)。
其他裝置;物聯網在硬體方面大致可為前端節點(node)、閘道(gateway)、以及後端雲 端(cloud),微機電系統(Microelectromechanical Systems, MEMS)在此扮演蒐集訊號數值 給智慧型裝置(smart device)的感測器,再將大量蒐集得來的資料透過閘道傳往雲端儲 存運算;物聯網可利用 MEMS 有效滿足低功耗、精簡小巧、合乎成本效益等訴求 (Czurak, Maj, Szermer, & Zabierowski, 2018)。
當室內發生火災時,最需要關切的問題是要如何落實災害早期的避難動作,使傷 亡人數降到最低。物聯網感知層之設備,可使用來進行早期監測動作,因此需要使用 煙霧、溫度、火點、氣體濃度等等感測器終端設備,感測取得之數據結果,經由閘道 傳送訊息,觸發控制器開始後續動作。 為精進智慧型避難引導系統,沿用本所先前研究成果,運用無線感測網路技術, 蒐集場域中的溫度、氣體濃度與火點感測等等相關環境資訊,並且加入藍牙 5.0 技術, 利用室內定位節點提供室內環境精準定位,提升所內研發之 RFID 室內定位輔助技術, 回傳至中央監控系統,提供機器人位置引導及人員位置引導,即時回傳數據交由系統 演算,隨時更動智慧型避難引導系統的輸出結果。 利用物聯網平台整合具多元感知設備,使其通訊協定皆可溝通,建置一具有溫度、 濕度、照度以及煙霧等環境感測系統,使不同裝置間具有節、溝通的管道提供最佳化 室內人員定位,提供室內移動設備及人員引導,使物聯網設備,統一結合此平台完成 即時資料訊息交流。
壹、 感測器開發板套件
一、Arduino UNO R3 圖 2- 5 Arduino UNO R3第二章 蒐集之資料、文獻分析 ArduinoUNO R3(圖 2- 5)為一種單晶片微控制器,使用 Atmel AVR 的 8 位元晶片, 建構於簡易輸入、輸出的介面板,採用開放式原始碼的軟硬體平台,使用類似 C 語言 的開發環境。可由 USB 連接埠、電源輸入插座、Vin 腳位三種方式提供電源。具備類 比以及數位接腳,類比腳位可輸出高電位 5V 與低電位 0V 的訊號,也可進行訊號輸入; 類比訊號有 A0 至 A5 六個腳位,可用來接收類比電壓輸入,但無法輸出類比電壓,需 透過其他腳位進行 PWM 模擬。 二、Raspberry pi(樹莓派) 圖 2- 6 Raspberry pi(樹莓派) (資料來源:台灣樹莓派)
Raspberry Pi(圖 2- 6)是一款由 Linux 作業系統為基底的單晶片電腦,由英國樹莓派 基金會所開發,以低價硬體開發為目的,並分 A、B 兩種型號,Python 程式為第一個 移植到樹莓派上執行的程式類別。基本配備一枚博通半導體公司(Broadcom)出產的 ARM 架構 700MHz BCM2835 處理器、256MB 記憶體(B 型為 512MB 記憶體),使用 SD 卡方式作為儲存媒體,且擁有一個 Ethernet、兩個 USB 介面、以及支援聲音輸出 的 HDMI 和 RCA 端子輸出支援。
三、AppsBee ZigBee 2.4G RO、CO
圖 2- 7 AppsBee ZigBee 2.4G(CO)
AppsBee 系列 ZigBee 擴充板是一個專為 Arduino 打造的 ZigBee 的擴充板(圖 2- 7), 可將擴充板直接插入 Arduino 的接腳插槽內,不需再透過其他轉接板。模組基於 TI 高 性能低功耗的 2.4G 射頻收發晶片 CC2530 及大功率低雜訊射頻前端晶片 CC2591,體 積小,信號好,具有性能穩定、低功耗、遠距離、大量 ZigBee 無線傳感器組網的能力。 開發過程簡化為 UART 與 IO 腳位控制的簡單操作,而 AppsBee 擴充板也能藉由開放 硬體 Arduino,連結眾多感測器與程式庫(Libraries),讓使用者易於操作。
貳、 終端設備
一、PT100 溫度感測器+溫度轉換器 (A) PT100 溫度感測器 (B)溫度轉換器(0~5V@0 ~ 300°C)/24V 圖 2- 8 溫度感測器 (資料來源:賀利氏材料科技) 測量環境溫度,使用 PT100 電阻型高溫探頭,提供 24V 電源,利用電位差異進行 測量資訊傳遞,為提供數據採集便利性,本研究使用溫度轉換器連接高溫探頭以及主 板(圖 2- 8),主要為測量 0 至 300 度的溫度變化,讓測量環境溫度之數值產生線性特性, 使數據更加純化且正確可採信。 二、MQ136 H2S Sensor第二章 蒐集之資料、文獻分析 (資料來源:漢威電子) MQ136 H2S Sensor(圖 2- 9)利用氣體感測特性來驅動金屬特性,而產生微小的電 阻變化,透過雙路信號輸出,具有信號輸出指示,模擬量輸出 0~5V 電壓,回傳之電 壓越高代表濃度越高。對硫化氫、天然氣、煤氣、煙霧有較好的靈敏度。此感測器使 用上需提供 5V 直流電,通電後燠熱經過 20 秒左右,即可測量穩定數據。
三、Multichannel Gas Sensor
圖 2- 10 Multichannel Gas 感測器 (資料來源:Seeedstudio) 多通道有害氣體感測器(圖 2- 10)內建 MiCS-6814 單晶片,可以偵測多種對人體有 害的氣體,傳感器可以針對一氧化碳、二氧化氮、乙醇、氫氣、氨氣、甲烷、丙烷、 異丁烷七種不同氣體進行採集,可同時針對三種不同氣體做接收動作,但為了讓感測 器能夠確實且精準抓取環境數據,本研究僅選擇 NO2 與 NH3 數據進行採集。 四、CO Sensor 圖 2- 11 NAP-505M 感測器 (資料來源:艾格倫科技) 一氧化碳感測器 NAP-505M(圖 2- 11)是日本最平民化的環境中的一氧化碳氣體蒐 集的感測器。在智慧環境的建築中,NAP-505M 是在價位與精準兩者之間的最佳選擇, 其工作原理是利用電化學式檢測電極的氧化還原方式進行檢測空氣中 1,000ppm 以內
的 CO 含量,且完全不受濕度影響。 五、CO2 Sensor 圖 2- 12 MH-Z19B 感測器 (資料來源:煒盛科技) 二氧化碳感測器 MH-Z19B(圖 2- 12),為 NDIR 非色散式紅外線氣體感測器,利用 氣體對紅外線特殊波長的吸收特性與氣體濃度與吸收量呈正比之特性,測量氣體濃度 由 0 至 5000ppm,其氣室採用鍍金處理,具有防水以及防腐蝕性,並同時有數字輸出、 模擬輸出及 PWM 輸出,方便使用者同時接收。二氧化碳對 4.3µm 波長之紅外線的吸 收性最強,因而得以使用涵蓋此範圍的元件進行氣體濃度偵測。
第三節 藍牙技術探討
藍牙是一種無線通訊技術,使用短波特高頻(Ultra High Frequency, UHF)無線電波, 經由 2.4 至 2.485 GHz 的 ISM 頻段來進行通訊,為避免同頻率裝置的干擾,採用頻率 跳躍(Frequency Hopping),避免同頻率裝置的干擾,並連結多個裝置形成個人區域網 路(Personal Area Network, PAN)。藍牙技術由 1994 年開始發展,於 2016 年 6 月發布 5.0 協議,從先前版本的高速藍牙、低功耗藍牙 Bluetooth Low Energy (BLE)又再更精 進,把有效傳輸距離的理論值提升至 300 公尺,傳輸速度升至 24Mbps。
藍牙 5.0 可允許物聯網設備遠離當前配對的設備並獨立運行,把裝置的有效傳輸 距離理論值提升至 300 公尺,傳輸速度升至 24Mbps,並且在拓撲結構中廣播(broadcast) 更為豐富的資訊,近期更推出 Mesh(網狀網路)技術,打破傳統藍牙裝置間「一對一」 的配對限制,轉變成「多對多」的訊號傳輸模式,使低功耗藍牙的拓撲,由原先的點
第二章 蒐集之資料、文獻分析 變化為 Mesh,並將多對多連結的行為模式,應用在藍牙 5.0 以及其過往版本上,此套 技術的連線規範,可使上百個節點(node)互相連結,使其連線範圍更為廣泛。解決物 聯網設備單一連結所耗費高成本,因此 Mesh 的出現對於對物聯網發展增添了許多應 用空間 (何世偉, 2007)。 本研究團隊對於現行藍牙裝置市場進行前期研究發現,市面上有一款藍牙裝置 tracMo 使用藍牙 5.0 技術,其主打低耗電長時間運作的特色,且支援網狀網路(mesh), 只要處於裝置之有效範圍,裝置與裝置之間即可進行連接與溝通,提供多對多的裝置 傳輸。除此之外,也可透過智慧型裝置進行連線,使得每個裝置都成為一個節點,延 伸整體網狀網路得延伸範圍。通訊傳輸時,節點因為原先設置好的 broadcast 條件,在 接收鄰近節點傳送之訊息時,同時也不斷傳輸資料給其他節點,使各個節點形成中繼 站(relay station),直到傳送的訊息到達雲端平台,由於聯網的機制,使用者也可即時更 新 tracMo 接收的資訊,透過其網域,使周邊設備共同尋找所在位置,所以 tracMo 的 中繼站越多,搜索範圍就越廣泛。
第四節 室內定位探討
藍牙定位基於 RSSI(Received Signal Strength Indication,接收信號強度指示)定位原 理,亦同為 wifi 定位中最常見的觀察結果,其示意圖如圖 2- 13。RSSI 的定位計算方 式為隨著傳輸距離的增加,信號衰減模型(Signal Attenuation Model)所接收到的藍牙信 號強度逐漸減弱,為了使 RSSI 值更精確,可採用高斯曲線擬合(Gaussian curve fitting technique)或是高斯光滑技術(Gaussian smooth technique)來處理訊號。將三個 beacon 透 過計算公式取得三個圓的交點、節點位置、多個交叉點位置以及重疊區域,最後使用 質心定位算法(centroid localization algorithm)解決問題 (Shen, Yang, He, & Huang, 2016)。
圖 2- 13 室內定位示意圖
(資料來源:本研究自行繪製)
定位方面常用的定位技術,例如接收訊號角度定位法(Angle of Arrival, AOA)主要 是利用訊號接收時的角度進行定位,然而卻需要有額外的方向性天線或其他輔助設備, 才得以達成,其定位原理,是利用具有方向性且已知的訊號發射地點所量測的訊息, 便可得出目的地的來源方向,如有遇到兩個或以上的基地台分析出目標的方向,可運 用兩條或以上的直線做交點定位,直線之交點便是目標之位置。AOA 定位之缺點包含 多重路徑效應(Multi-path)之影響,且定位演算法較為複雜,導致定位精準度相較之下 準確度不足,如果接收端基地台與目標地點距離較遠時,解析度造成的誤差距離也將 嚴重影響定位的精準性;到達時間定位法(Time of Arrival,TOA)與到達時間差定位法 (Time Difference of Arrival, TDOA)則是利用訊號接收的時間進行定位,而節點與節點 之間訊號時間同步部分需要額外的硬體才能完成定位工作,透過測量訊號時到達兩個 基地台的時間差來確定目標位置,只需要各基地台之間進行時間的同步校正,不須由 基地台跟目標設備完成同步校正。可適用於三個基地台預測出兩個 TDOA 的模式,並 可訂定目標為於兩個 TDOA 所決定出的平面雙曲線交點上。此方式缺陷在於功率控制 上,造成離基地台較近的目標發射功率較小,使用上造成測量誤差;最後是上述提及 之接收訊號強度定位法 RSSI,利用 RSSI 訊號定位不需要額外且高成本的硬體設備, 且幾乎所有的射頻晶片中都提供數位化之 RSSI 參數,可供使用者抓取資訊加以分析 處理 (G. Mao, 2007) (N.Patwari, 2003)。 基於定位端的不同,藍牙定位方式分為網路側定位和終端側定位。網路側定位系 統由終端(智慧型裝置)、藍牙 beacon 節點,藍牙網關(Gateway),及後端數據伺服器構 成。當終端設備進入 beacon 信號覆蓋的範圍,測出其在不同基地台下的 RSSI 值,再 依照訊號強度定位出實際位置。 結合 WiFi 減少室內定位誤差,藍牙在傳輸距離方面還是不及 WiFi 的廣泛,因此 結合 WiFi 的定位範圍,再加上省電等等特性,使其兩者技術得以相輔相成。結合之方 式,可使藍牙掃描周圍的 BLE 廣播器裝置,再藉由微控制器單元與 WiFi 溝通,因 BLE
第二章 蒐集之資料、文獻分析 線溝通韌體,進行相互連線溝通 (Pei, et al., 2012)。 目前室內定位常用的定位原理,主要分為:鄰近探測法、極點法、多邊定位法、 質心法、指紋法和航位推算法,可在不同場合變更或組合使用。主流技術舉例以下幾 種: 1. WiFi 定位技術:採用”近鄰法”判斷,意旨最靠近哪個熱點或基地台,處在什麼位 置,交叉定位多個訊號源提高精度,可以實現大範圍之定位。 2. 藍牙信標技術:精度相較 WiFi 稍微高一點,信標透過藍牙,向周圍廣播自身的 ID, 終端取得後便會從雲端抓取此 ID 對應的位置資訊。 3. 無線射頻辨識技術(RFID):透過發信器取得資訊,採用近鄰法、多邊定位法、接 收信號強度等方法,確定標籤所在位置,其作用距離很近且精準,但其不具有通 信能力,以及抗干擾能力,不便整合於其他系統當中。 4. 紅外線技術:分別透過多對發射器和接收器,直接對運動目標進行定位,以及使 用紅外線的電子標籤發信器,測量信號源的距離或角度,計算出目標所在位置, 但容易被遮蔽或受熱源、燈光等干擾,造成定位精準度下降。
以目前常見的定位技術來說,精準度最高的是超寬頻(Ultra Wide Band, UWB) 技術,但 UWB 技術礙於成本高昂、設置複雜與高耗能等因素,無法普及;其次 是藍牙信標技術以及紅外線技術,在訊號穿透力的考量下,紅外線技術易遭遮蔽 的問題導致無法有效定位,藍牙技術演進成 5.0 後,其訊號傳輸距離與傳輸速率 又更精進,並帶有低耗電之優勢,這是相較於其他技術較難達成的,目前足以在 低耗電量考量時與藍牙相匹敵的方式為 ZigBee 定位技術,但 ZigBee 定位技術的 定位精準度不足,因此藍牙定位為目前較佳之室內定位使用方式。
第五節 機器人探討
機器人意旨機械從事人類或其他生物的行為模式,協助或取代人類的工作,完成 高準確度的特定動作。依照不同需求完成各種作業,透過馬達驅動手臂上的動作,精 確的傳達至微控制器上。使機器人具備可偵測或移動等動作模式,協助偵測探勘等工作,在許多不宜人類 活動之場域,完成指示任務,避免人員的安全疑慮。以煤礦場為例,研究人員開發了 仿生的多足機器人,以蜘蛛為原型設計八足移動,以更快、更靈活地方式穿梭災害場 所,大大提升其靈活性與對複雜環境的適應能力。機身依需求搭載不同的感測器,可 以檢測現場的溫度、各式氣體濃度、內部即時影像、甚至是聲音輔助,協助完成探測, 提供災害地點的位置及相關基本資訊。 機器人的防災系統和救援系統一直倍受關注,為了使災害現場的傷亡減至最低, 機器人的雛形也各自有不同的發展。運用於室內場所時,需要使用感知裝置獲取場景 影像,透過紅外線感測器或是影像辨識技術避開障礙物。亦可透過 D*(Dijkstra's algorithm)等演算法進行移動路線的計算,不必探明地圖也可進行環境探索,隨時的進 行調整 (三津村直貴, 2018)。 機器人類型五花八門,用於消防救災更是需要更多特別的功能,像是履帶行機器 人,於災害現場能在複雜地形中行動自如,可適應場域較輪胎型移動更為廣泛。自動 避障機器人,對於受災場地具備基本閃避障礙物的能力,可利用超聲波、影像辨識等 感知設備進行探索,減少無謂的損害;附含感測功能之機器人,可直接進行無人斥侯 工作,可搭載各式氣體、溫度、光感等感測器進行量測。懸浮功能之機器人,可利用 噴氣、磁浮等能力進行離地探勘,掠過殘骸路段與高低位移處,進行更有效的探勘工 作。機身具備隔熱隔化學物質之特殊材質機器人,即使場域全面受害,也能經由此類 型機器人短暫承受此危害,進行緊急應變措施。滅火、排煙機器人如圖 2- 14,搭載各 式滅火、排煙用具之專門機器人,經由專業人員挑選過後,便可在指定場域發揮滅或 排煙之最大效益。輕巧類型之機器人,可適應一般機器人無法進入知狹隘空間與管道, 進行障礙物清除、偵查等工作。甚至是具備飛行功能的無人機如圖 2- 15,協助完成高 處的偵查工作,具備空中移動之特色,甚至有國外企業將無人機投入救災工作,將消 防車連結無人機進行高空滅火工作,可謂機器取代人力的一種代表運用。
第二章 蒐集之資料、文獻分析 圖 2- 14 滅火、排煙消防機器人 (資料來源:中國特種機器人網) 圖 2- 15 消防無人機 (資料來源:Aerones) 諸多機器人實驗在火場上搭載多元感知設備進行實際偵測,完成滅火或勘查任務, 以避免救災人員的安全疑慮。國內以火災初期達成安全消防目的的研究中,也有以自 走車為原型的滅火機器人,以網路攝影機(Webcam)頂替視覺功能,利用影像處理取得 火源中心的參數,結合模糊控制器判斷相對距離,進行火災辨識與追蹤,判定為火災 時立即撲滅。日本東北大學研發出名為「Dragon Firefighter」的浮空消防機器人原型如 圖 2- 16,只要管線的末端被固定,透過噴射水柱的推力就能讓噴水管線維持與末端一
樣的高度,可直接由半空中進入火場灌救,末端再配備光學以及紅外線鏡頭,方便消 防員作業時掌握火場內部的情況 (Jing & Jian-hui, 2009)
圖 2- 16 浮空消防機器人
第三章 極早期火災感知
第三章 極早期火災感知
第一節 人工智慧演算
透過真實數據、環境感知或擬真模擬數據方式來取得環境中起火時的感知數據, 而這些數據在尚未經過處理,不僅無法了解其數據的內容,也無法得知環境中變化的 狀況,因此本研究透過人工智慧來進行分析提升判斷起火點的探知。 為了能達成此目的,必須要先透過數據清理將所有的數據進行最佳化整理,並將 不符合邏輯之數據進行排除後,將有效的數據進行訓練集或測試集的分割,以利後續 訓練模型的測試與比對,搭配人工智慧與類神經網路的演算法來建立訓練模型,將訓 練集的資料導入模型進行有效的建模訓練,建立出測試模型後,再透過測試集資料來 評估訓練模型的準確性與性能是否有任何的誤差,若有誤差則會透過誤差修正與權重 調整重新訓練模型,至誤差直到最佳化,完成訓練。 完成訓練的模型則可以使用真實的環境數據或者即時性的環境數據來預測出環境 溫度異常是否會對環境造成危害,若是則必須要進行極早期危險感知通報,若否則持 續輸入預測,圖 3- 1 為人工智慧數據流程的處理流程圖。 一、機器學習 機器學習為一種透過從過往的資料中學習並找到其運行的規則,最後達到人工智 慧的方法,包含從母體資料中找到的樣本資料,並透過樣本資料訓練機器辨識出運作 模式,而不是用特定的規則編寫運作模式。機器學習同時也是一種弱人工智慧,它從 資料(或樣本)中得到複雜的函數(學習),並利用它來預測母體行為。比擬於一般人類的 思維,可想像它從日常生活中選擇模型,再經由資料(樣本)進行學習得到最佳擬合函 數以創造現實生活的運作模式,並應用於現實生活中 (周碩彥, 2015)。 1. 監督式學習 提供的資料中同時提供問題的線索與答案讓人工智慧學習,問題解決的方法。針 對問題的輸入,使用解決方法(模型)提供問題的答案,如果答案不正確就自動調整解 決方法(模型)中的參數。其優點是邊確認答案(輸出)邊調整參數(學習)。同為給機器答案,讓他學習分類。例如:匯入貓的照片告知機器說「這個是貓」,再給機器狗的照片, 告訴機器說「這個是狗」,讓機器自己去學習分辨,接著給予貓或狗的照片,讓機器告 訴我們這是貓還是狗。 圖 3- 1 人工智慧數據處理流程圖 (資料來源:本研究自行繪製) 2. 非監督式學習 並未給定事先標記過的訓練範例,自動對輸入的資料進行分類或分群,即不給機 器答案,讓機器自己去學習分類。例如:給機器一堆貓和狗的照片,但並沒有告訴機 器說哪些是貓哪些是狗,要機器自己去學習判斷出分類出圖片的不同之處。
第三章 極早期火災感知 3. 半監督式學習 給機器部分的答案,後續再讓機器自行做剩下的分類。例如:任意選 10 張貓或狗 的照片,在其中的 1 張告訴機器哪些是貓,哪些是狗,讓機器去學習認識貓與狗的外 觀,再自己嘗試把另外 9 張照片內的特徵取出來進行分類。 二、人工智慧預測 預測流程大致可分為建立模型、訓練模型與對模型評分與測試共三階段(圖 3- 2), 其中建立模型時需取得預測的相關資料,並準備篩選出可運用的資料,並定義即將進 行分析的資料特性,訓練模型時,選定並套用和式之演算法,並開始進行分析運算, 對於本案獲得之火場數據,便可預測火災發生的機率。 圖 3- 2 機器學習模型圖 (資料來源:本研究自行繪製)
第二節 燃燒實驗規劃
承蒙內政部建築研究所的邀請,本計畫有幸與其他相關防火計畫案同時進行室內 H2S+CO.csvSelect Columns in Dataset Clean Missing Data
Select Columns in Dataset Split Data Linear Regression
Training Model
Score Model
模擬燃燒實驗,在此實驗中,預計將蒐集真實燃燒火場室內環境數據與真實感知測試, 透過規劃研究發現,可藉由內部多元感知模組來感知現場狀況,傳遞即時資訊,再經 由系統式整合,給予主系統各種輔佐判斷之相關資訊,將各種狀況發生時知感測紀錄 資訊,儲存置資料庫並加以上傳至雲端系統,以利後續人工智慧演算工程運算。「複合 式人工智慧避難引導系統」是一套經由物聯網平台結合各方數據再透過演算法計算出 預期成果的早期火場無人斥候系統。本系統整合眾多終端物聯網設備,透過多元感知 設備運作獲取所需資訊,本研究預期使用物聯網平台 IoTtalk 彙整溫度感測器與多類型 之氣體感測器並與藍牙定位裝置,透過平台加以分門別類不同的感測數據,將資料做 儲存,傳入至智慧型避難系統,配合隨時更新的感測資訊,進行即時性的演算。
壹、智慧感知
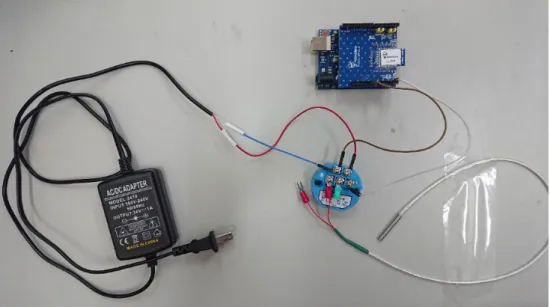
環境感知模組為本系統最不可或缺的一環,扮演系統演算的重要依據,在計畫中 我們測量環境中的溫度與各氣體數值,追蹤這些感知裝置的數值變化,依據這些測量 的數值變化量,讓系統對於這些異常數值給予示警,所以當各感知模組設置完畢後, 感測器便開始回傳場域資訊至物聯網平台,倘若場域發生異常時,回傳之數值將會使 監控系統偵測到問題,進而觸發避難程序。 一、多元感知模組 多元感知模組包含諸多環境感知設備,以及上述提及之 Arduino 載板與由樹莓派 為主的數據蒐集叢集系統;傳遞資訊的氣體感測裝置皆透過 Arduino 主板提供運作所 需電源,溫度感測則另外供電,兩者皆經由 ZigBee 2.4G Module(AppsBee RO)外接模 組進行資訊傳輸,設定 Baud Rate 至相同數值,使其得以進行資訊傳遞。所使用之感 測器經討論後,使用以下對於火場數值蒐集較有觀測價值之項目,有以下幾種: 1. Multichannel Gas Sensor經由 USB 連接線提供主板電源並透過 zigbee 擴充板提供 sensor 5V 電力;主板至 感測器連結為一條電源線、一條接地線與兩條類比訊號線(圖 3- 3)。
第三章 極早期火災感知
圖 3- 3 Multichannel Gas Sensor 實際連接圖
(資料來源:本研究自行繪製)
2. MQ-136 H2S(硫化氫) Sensor
經由 USB 連接線提供主板電源並透過 zigbee 擴充板提供 sensor 5V 電力;主板至 感測器連結為一條電源線、一條接地線與一條類比訊號線(圖 3- 4)。
圖 3- 4 H2S Sensor 實際連接圖
(資料來源:本研究自行繪製)
3. CO Sensor
經由 USB 連接線提供主板電源並透過 zigbee 擴充板提供 sensor 5V 電力;主板至 感測器連結為一條電源線、一條接地線與兩條數位訊號線(圖 3- 5)。
圖 3- 5 CO Sensor 實際連接圖
(資料來源:本研究自行繪製)
4. CO2 Sensor
經由 USB 連接線提供主板電源並透過 zigbee 擴充板提供 sensor 5V 電力;主板至 感測器連結為一條電源線、一條接地線與兩條數位訊號線(圖 3- 6)。 圖 3- 6 CO2 Sensor 實際連接圖 (資料來源:本研究自行繪製) 5. PT100 溫度感測器 由左方 24V 電源提供電力,透過電源線輸出至溫度轉換器,並與 PT100 溫度感測 器連接兩條訊號線,主板方面則予以一條接地線及一條類比訊號線(圖 3- 7)。
第三章 極早期火災感知
圖 3- 7 溫度感測器實際連接圖
(資料來源:本研究自行繪製)
數據蒐集叢集系統組成為 Raspberry Pi 3B +、可連網之行動或無線網路、Arduino UNO R3、ZigBee 2.4G Module(AppsBee CO),將回傳資料運用 Raspberry Pi 中的 Python 方式進行資料上傳,將所有資訊傳回至 IoTTalk 中,其實際連接圖如圖 3- 8。 圖 3- 8 資訊叢集協調端實際連接圖 (資料來源:本研究自行繪製) 本研究使用以上 5 種感測裝置作為資料蒐集的媒介,其中 Multichannel 目前使用 來蒐集 NH3、NO2 等氣體,其餘皆針對特定物質做數據接收。由感測器連接 Arduino 底板,並由 Zigbee 擴充板傳輸,再由連接至樹莓派的 Zigbee 做接收,接收的數據使用 樹莓派 4G 模組如圖 3- 9,使用網卡方式將資料上傳至 IoTtalk 平台,同時儲存到資料 庫。
圖 3- 9 樹莓派 4G 模組連接圖 (資料來源:微雪百科) 本研究將該系統所使用之工作版、感測器與其相關設備之相關資 訊整理為感測元 件一覽表如表 3- 1 所示,建構之模組整理表如表 3- 2 所示。 表 3- 1 感測元件一覽表 工作溫度 Arduino uno R3 -40~85℃ Zigbee 2.4G 擴充板 -40~85℃ Multichannel Gas 氣體感測器 -10~50℃ CO 氣體感測器 -20~45℃ CO2 氣體感測器 0~50℃ MQ136 H2S 氣體感測器 -10~50℃ PT100 溫度感測器 -200~420℃ 溫度 24V 電源轉接 -20~80℃ 溫度轉換器 -20~85℃ 樹莓派 3 B+ -40~85℃ 樹莓派 4G 擴展板 (SIM7600CE) -30~80℃ (資料來源:本研究自行繪製)
第三章 極早期火災感知 表 3- 2 感測模組一覽表 測量範圍 通訊模組(Arduino uno + AppsBee) 溫度感測模組 0℃~300℃ CO 感測模組 1~1000ppm CO2 感測模組 0~5000ppm H2S 感測模組 1~200ppm Multichannel Gas 感測器(組) 二氧化氮 NO2 0.05 - 10ppm 氫 H2 1 - 1000ppm 氨 NH3 1 - 500ppm (資料來源:本研究自行繪製)
貳、物聯網平台
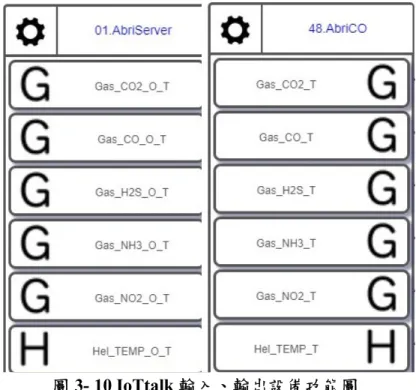
物聯網的各個裝置間,如果需要串流或是連結,時常有可能因為設備的限制,需 要進行介面的整合或是經歷額外連線過程,我們可以把物聯網設備依照不同的設備功 能或是特徵來做分類,訂定物聯網設備功能(特徵) (device feature,DF)做為特殊的輸入 或是輸出功能(capability),將擁有偵測功能的穿戴裝置稱為輸入功能(input device feature, IDF),將擁有顯示等功能的穿戴式裝置稱為輸出功能(output device feature, ODF)。一、IoTtalk
IoTtalk 系統是一個建構於分類設備功能 (device feature) 特徵概念的物聯網設備 平台 (Lin, Lin, Huang, Chih, & Lin, 2017),如圖 3- 10 所示,透過設備連線後定義設備 之特性,當物聯網終端設備經由連接至系統時,將會針對各種不同的物聯網感測裝置, 由 IoTtalk 系統自動產生或使用相對應的應用軟體來處理,免除了上述提及之介面整合 問題,因此在物聯網平台上每一次將設備連接至輸入端至都可以很方便的連接至設備 輸出端。
圖 3- 10 IoTtalk 輸入、輸出設備功能圖
(資料來源:本研究自行繪製)
二、平台架構
IoTtalk 可稱為物聯網設備特性管理系統,主要可分成選單(menu bar)、圖形布局 視窗(Graphical Layout Window)以及管理視窗(Management Window)三個部分。圖形布 局視窗會顯示物聯網設備連線情形,連結成功的設備稱之為連線物件(connection object )。管理視窗讓使用者可以設定圖形布局視窗中的設備功能、連線、以及對應之 函數 (Lin, Lin, Huang, Chih, & Lin, 2017),其設備連接範例如圖 3- 11 所示。
第三章 極早期火災感知 圖 3- 11 IoTtalk 設備連接圖 (資料來源:本研究自行繪製) 當使用者選擇欲使用的物件時,圖形介面會從資料庫中抓取這個設備模式中所有 已註冊的設備。假使相同的設備模式有好數個設備已註冊至 IoTtalk 系統平台,則每個 註冊的物聯網設備,圖形介面都會在管理視窗中產生一個已註冊的設備列表。完成註 冊後 IoTtalk 系統會將實際將設備連結至所指定的設備物件,後續圖形介面將可以不經 過選擇的程序,直接取代該物件,連同取消連結時也亦同,註冊成功如圖 3- 12。
圖 3- 12 IoTtalk 設備註冊圖 (資料來源:本研究自行繪製) 平台中設備相互連接的部分,一個輸入設備功能(IDF)可以經由圖形布局視窗中一 個稱之為連結物件(join object)的小圓圈連接至輸出設備功能(ODF)。舉例一條連結只包 含一個輸入功能設備則稱之為單一連結(single join),如果一條連結包含多個輸入功能 設備則稱之為多重連結(multiple join),對於連接至同一個連接點的多個輸出設備功能 (ODF)而言,輸入設備功能(IDF)對所有的輸出設備功能所造成的影響都是相同的,所 以即使有多個輸出設備功能(ODF)連接至同一個連接點,到最後只有一個輸入設備功 能(IDF)連至此一連接點,仍然可稱為單一連結。 本計畫的燃燒實驗應用研究中,使用物聯網平台 IoTtalk 連接目前所規劃的物聯網 終端設備,將其所有設備進行設定,在感測裝置運作時,能以系統化方式進行管理, 輸入輸出的部分經由分門別類的特性規劃,經由網路傳輸就可以傳送或接收來自物聯 網設備的訊息。 三、數據儲存 在 IoTtalk 運作中的感測裝置,其感測出的數據結果,可從伺服器透過物聯網平台 進行資料的下載,並根據特定之需求分別處理不同單元進行感測裝置的數據下載,在 儲存方面則可選擇採用 linq to SQL 的整合資料庫語言,藉以提升資料庫在儲存時的效 率,可避免所需資訊在蒐集時發生儲存不即時而造成遺失的狀況發生。
第三章 極早期火災感知
參、資訊蒐集系統
數據蒐集型態,目前預計由下方標示的 21 個字元所組成的資料型態,進行統一的 資訊管理規劃,使各項數據依照名稱或類別的不同,都有相對應的表示方式,以此方 式彙整所需數值,並進行數據的儲存以及上傳,彙整資訊型態格式如圖 3- 13。 圖 3- 13 數據型態表示圖 (資料來源:本研究自行繪製) 一、感測器資訊傳輸 感測器開始運作後,如有異常狀況發生將會啟動重新開啟程序,直到異常判斷消 失為止,正常執行時會啟用環境感知功能,進行各類型環境探測資訊蒐集,並由 ZigBee 進行資料的外部傳輸。直到電源關閉得以結束,其流程圖如圖 3- 14。 圖 3- 14 感測器資訊傳輸流程圖 (資料來源:本研究自行繪製) 二、樹莓派資訊傳輸 樹莓派開始運作後,將開始確認網路連線狀態以及硬體運作狀況,如有異常會將 其重新啟動,直到能正常由 ZigBee 模組接收另一端傳輸過來的資訊為止,將資訊依照 其型態特徵,給予資料接收時間排程,依照資料先進先出的結構概念,進行佇列儲存,再來進行 IoTtalk 物聯網平台的連線確認,如可順利進行連結,便可將以上資訊進行唱 傳,便可在進行下一階段之資訊接收,直到電源關閉,其流程圖如圖 3- 15。 圖 3- 15 樹莓派資訊傳輸流程圖 (資料來源:本研究自行繪製) 三、伺服端資訊傳輸 伺服器端透過物聯網平台 IoTtalk 進行資料的下載,並進行資料儲存,其步驟如圖 3- 16 所示,伺服器程式會透過 IoTTalk 平台下載資料,為了讓平台與資料擷取的叢集 端能夠順利將資料回傳至伺服器,必須要在伺服器程式中以佇列方式來進行資料接收, 將所有的資料逐一接收並且排入佇列當中,讓資料能夠以先進先出的方式來處理所有 的資料以防遺漏,而伺服器程式另一端則是來處理佇列資料並將其存入資料庫,會將 資料中的相關數據進行切割,並將資料所夾帶的時間戳記進行資料庫時間格式進行轉 換,以取得資料感測時的時間,並透過 SQLtoLINQ 技術將資料以模組形式逐一加入 資料列表中,並累進數量至定量後一次存取資料表,以降低資料庫儲存之佔據以及記 憶體的釋放,以提升伺服器端應用程式的效率,而伺服器端執行是一個無限型的迴圈 方式進行執行,只要有數據從 IoTTalk 平台中被下載就會進行處理,直到伺服器被關 閉為止,若被關閉則伺服器會完成執行任務結束程式。
第三章 極早期火災感知 (資料來源:本研究自行繪製)
肆、場域規劃
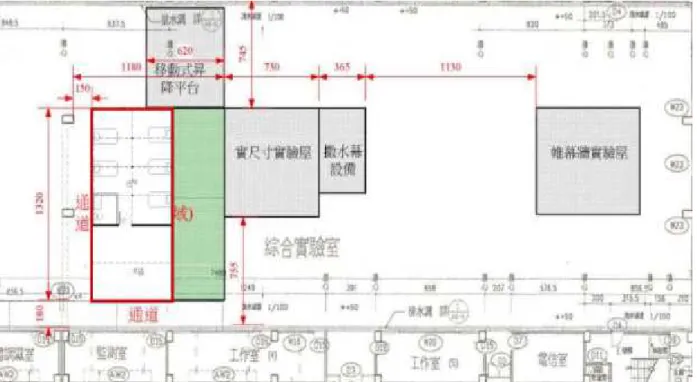
本實驗為共同參與「長照機構居住權使度火災特性實驗及應用研究」(計畫編號: 108301070000G0011)之場域燃燒模擬實驗,場地由內政部建築研究所歸仁防火實驗中 心提供。 一、規劃構思 以衛服部台北醫院附設護理之家於 2018 年發生火警事故為出發點,考量長構機構 近六年來發生六起火災重大事故,約莫 40 餘人不幸罹難之災例,對於護理機構之場域 火災成場變化,進行實地演練探討,並驗證複合式人工智慧避難引導系統的場域資訊 接收,提升避難預警的成效性。 二、規劃資訊 實施地點:建研所歸仁防火實驗中心 佈設時間:108.5.26 上午 8:30~11:00 場域地圖:如圖 3- 17 環境感知模組設置: 溫度感測模組:PT100 溫度感測器 4 組、Arduino 主板 4 組,ZigBee 擴充板 4 組 氣體感測模組:Multichannel 感測器 4 組、H2S 感測器 4 組、CO 感測器 4 組、CO2 感 測器 4 組、Arduino 主板 12 組,ZigBee 擴充板 12 組 數據蒐集叢集系統:樹莓派 1 組、4G 傳輸模組 1 套、4G 網卡一張 而本研究也將整體系統結構,進行整理並將繪製為實驗系統架構圖,如圖 3- 18, 由該系統可以看出整體系統結構的流程運作以及使用之通訊技術,皆已不同的方式來 區分,包含感測器透過訊號線連接至 Arduino 主板、ZigBee 擴充板之間進行無線傳輸、 樹莓派 4G 網路傳輸,以及 IoTTalk 平台資料的上傳與下載。圖 3- 17 實驗場所室內平面圖
(資料來源:內政部建研所)
圖 3- 18 實驗系統架構圖