國
立
交
通
大
學
電控工程研究所
碩
碩
碩
碩
士
士
士
士
論
論
論
論
文
文
文
文
以數位座標旋轉演算法為主之
直流無刷馬達弦波電流無感測控制
CORDIC-Based BDCM Sensorless Control
with Sinusoidal Current Waveform
研 究 生:黃暐舜
指 導 教 授:陳 鴻 祺 博士
中
中
中
中
華
華
華
華
民
民
民
民
國
國
國
國
九十
九十八
九十
九十
八
八
八
年
年
年
年
九
九
九
九
月
月
月
月
以數位座標旋轉演算法為主之
直流無刷馬達弦波電流無感測控制
CORDIC-Based BDCM Sensorless Control
with Sinusoidal Current Waveform
研 究 生:黃暐舜 Student:Wei-Shun Huang
指導教授:陳鴻祺 Advisor:Hung-Chi Chen
國 立 交 通 大 學
電控工程研究所
碩 士 論 文
A ThesisSubmitted to Institute of Electrical and Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical and Control Engineering
Sep. 2009
以數位座標旋轉演算法為主之
以數位座標旋轉演算法為主之
以數位座標旋轉演算法為主之
以數位座標旋轉演算法為主之
直流無刷馬達弦波電流無感測控制
直流無刷馬達弦波電流無感測控制
直流無刷馬達弦波電流無感測控制
直流無刷馬達弦波電流無感測控制
指導教授 指導教授 指導教授 指導教授::::陳鴻祺陳鴻祺陳鴻祺陳鴻祺 研究生研究生:研究生研究生:::黃黃黃黃暐舜暐舜暐舜暐舜 國立交通大學 國立交通大學 國立交通大學 國立交通大學電控工程研究所電控工程研究所電控工程研究所電控工程研究所摘要
摘要
摘要
摘要
本論文以數位訊號處理器(Digital Signal Processor,DSP)來實現弦波直
流無刷馬達之無感測速度迴路控制。首先分析馬達的等效模型和討論控制
策略。然後利用擴展應電勢(Extended Electromotive Force, EEMF)推導出本
篇論文所使用的位置誤差估測式,因此位置誤差估測式為一反正切(arctan)
函數,故我們利用數位座標旋轉演算法(CORDIC)運算出結果。之後在 PSIM
建立整個無感測控制電路架構並且模擬確立其可行性後,再進入實作。在
實作中我們利用光編碼器來偵測轉子位置,先完成整個磁場導向控制有感
測控制系統作為比對之用。之後在有感測之情況下,利用本篇論文之角度
誤差估測式加上數位座標旋轉演算法來推算得估測角度誤差值並與真正誤
差進行比對。確定角度估測是正確後,再進入無感測控制實作。實作驗証
結果本篇所提之無感測控制架構是可行的。
CORDIC-Based BDCM Sensorless Control
with Sinusoidal Current Waveform
Advisor: Hung-Chi Chen student: Wei-Shun Huang
Institute of Electrical and Control Engineering
National Chiao Tung University
Abstract
This thesis presents the implementation of a sensorless speed controller for
brushless DC motor(BDCM) with sinusoidal current waveform. First, the
BDCM equivalent model and the control strategies are studied, an equation for
estimated position error based on EEMF is derived. After the simulation of
CORDIC, EEMF and BDCM driver in PSIM, the proposed CORDIC-based
sensorless control is demonstrated.
Then, the conventional FOC(Flux-Oriented Control) with an encoder is
implemented. After comparing the estimated angular error of CORDIC to the
actual angular error and implementing the sensorless controller for BDCM, the
provided experimental results also demonstrate the proposed sensorless control.
誌謝
誌謝
誌謝
誌謝
本論文能順利完成,首先要感謝指導教授陳鴻祺博士,在撰寫本論文中,給予細心 指導。雖然在研究的過程中難免會有摩擦,也感受到挫折,但仍能克服其困難,這些過 程也成為研究的一小部分,使其論文修飾得圓潤。還有,感謝口試委員徐保羅教授和廖 德誠教授,給予本論文批評指教並提供寶貴意見,更加強論文的完整性。 在研究生活這兩年多中,感謝交大認識的好朋友:感謝學長子揚和奕謙,在剛進實驗 室時,讓我很快融入研究生活,並以過來人身分給予叮嚀與教導。感謝同窗們志杰、庠 澤、任號、和育慶,在兩年多的時間裡一起學習成長。感謝學弟們振宇、崇賢、子安、 智豪、威諭和宏和在最後研究生活的陪伴。最重要感謝的是跟我同窗六年的朋友們政 興、韋傑和懿德等,從交大電控系到交大電控所六年的時間,互相扶持克服難關,完成 課業後一同歡樂,讓枯燥的生活添加不少的樂趣。由衷感謝在影響人生中最重要的時 刻,能夠認識你們這群好友。 最後感激家人的支持,讓我在這兩年多的研究生活可以無後顧之憂的完成學業,總 在背後默默的付出,讓我在人生的這段重要時期過得更為順利,謝謝。目錄
目錄
目錄
目錄
摘要 摘要 摘要 摘要 ... I Abstract ...II 誌謝 誌謝 誌謝 誌謝 ... III 目錄 目錄 目錄 目錄 ... IV 圖目錄 圖目錄 圖目錄 圖目錄 ...VII 表目錄 表目錄 表目錄 表目錄 ... VIII 第一章 第一章 第一章 第一章 緒論緒論緒論緒論 ...1 1.1 研究背景與發展現況 ...1 1.2 數位座標旋轉演算法 ...2 1.3 無位置感測電流控制 ...2 1.4 論文架構 ...3 第二章 第二章 第二章 第二章 數位座標旋轉演算法數位座標旋轉演算法數位座標旋轉演算法數位座標旋轉演算法 ...4 2.1 座標軸旋轉 ...4 2.2 特定旋轉角度 ...5 2.3 CORDIC 演算法 ...7 第三章 第三章 第三章 第三章 無位置感測弦波電流控制無位置感測弦波電流控制無位置感測弦波電流控制無位置感測弦波電流控制 ...11 3.1 擴展感應電壓(Extended EMF) ...11 3.2 馬達中電感和電壓參數推導 ...13 3.4 同步旋轉軸參考座標 d-q 軸 ...16 3.5 假想同步參考座標 dc-qc 軸 ...18 3.6 CORDIC-Based 無感測控制 ...22 3.7 位置感測器信號量測與分析 ...23 3.7.1 位置感測編碼器...24 3.7.2 差動放大訊號電路 AM26LS32...25 3.7.3 實際量測信號...26 第 第 第 第四章四章四章四章 無感測控制模擬無感測控制模擬無感測控制模擬無感測控制模擬 ...29 4.1 啟動策略 ...30 4.2 穩態模擬波形 ...32 4.3 運轉變化模擬波形 ...34 4.4 CORDIC-Based 反正切函數模擬 ...36 第五章 第五章 第五章 第五章 實作結果實作結果實作結果實作結果 ...39 5.1 光編碼器位置對位 ...39 5.2 有位置感測下之開迴路測試 ...43 5.3 有位置感測下之閉迴路測試 ...47 5.3.1 電流回授...475.4 有感測下角度誤差估測器之比對 ...54 5.5 無位置感測控制之閉迴路測試 ...59 5.5.1 穩態運轉實作波形...59 5.5.2 轉速變化實作波形...61 5.5.3 無感測之啟動實作波形...63 第六章 第六章 第六章 第六章 結論結論結論結論 ...65 參考資料 參考資料 參考資料 參考資料 ...66
圖目錄
圖目錄
圖目錄
圖目錄
圖 2.1 座標軸旋轉示意圖 ...5 圖 2.2 座標旋轉軸運算示意圖 ...5 圖 2.3 座標軸旋轉示意圖 ...6 圖 2.4 經 5 次疊代後之樹枝狀 CORDIC 角度分布圖 ...8 圖 2.5 八次疊代之 CORDIC 運作方式 ...9 圖 3.1 同步參考座標 dc-qc 軸與 d-q 軸之相對關係 ...12 圖 3.2 二極三相的直流無刷馬達 ...13 圖 3.3 無感測弦波電流控制架構 ...22 圖 3.4 無感測弦波電流控制架構 ...23 圖 3.5 編碼器的外觀以及輸出訊號 ...24 圖 3.6 AM26LS32IC 輸出腳位圖 ...25 圖 3.7 信號經 AM26LS32IC 輸入和輸出示意圖 ...25 圖 3.8 三相等效圖 ...26 圖 3.9 量測接線圖 ...26 圖 3.10 馬達(8 極) ...27 圖 3.11 馬達(4 極) ...27 圖 4.1 所研擬無感測弦波電流控制之模擬電路 ...29 圖 4.2 所研擬啟動策略模擬波形 ...30 圖 4.3 速度與位置估測迴路 ...32 圖 4.4 無感測控制在 1000rpm 穩態模擬結果...33 圖 4.5 無感測控制在 2000rpm 穩態模擬結果...33 圖 4.6 無感測控制在 3000rpm 穩態模擬結果...34 圖 4.7 無感測控制在 1000rpm~3000rpm 暫態模擬結果 ...35 圖 4.8 CORDIC-Based 反正切函數模擬...36 圖 4.9 不同疊代次數下反正切函數理想值與 CORDIC 演算值之比較 (a) 5 次;(b)8 次;(c)10 次;(d)12 次 ...38 圖 5.1 直流無刷馬達開迴路的光電編碼器位置硬體配置圖 ...40
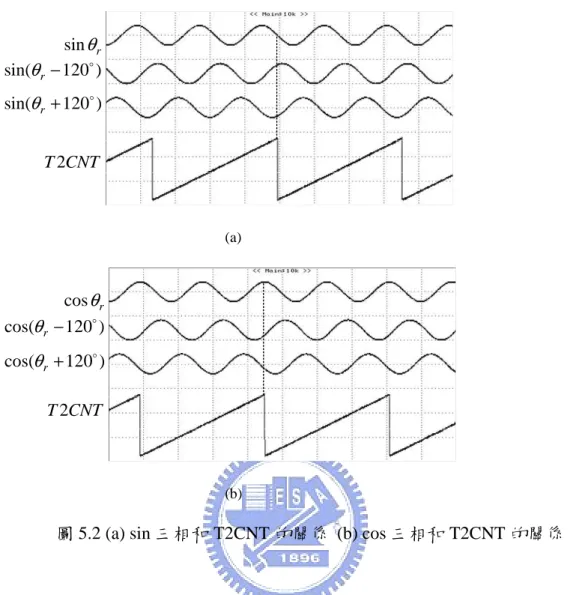
圖 5.2 (a) sin 三相和 T2CNT 的關係 (b) cos 三相和 T2CNT 的關係 ...41
圖 5.3 VcontA 和馬達 A 相之電動勢(Vq* =7FFF,Vd* =0)... 41
圖5.4 Z軸訊號和T2CNT ... 42
圖5.5 電壓控制訊號VcontA與A相上下臂PWM開關訊號關係圖 (a)VcontA正最大值時 ;(b)VcontA為零時 ;(c) VcontA為負最大值時... 44
圖5.6 DSP程式執行配合變頻器送電的主要流程圖... 45
圖 5.9 給予Iq*電流命令由 1A 提升到 2A,Id* =0 (RL =40Ω)...48 圖 5.10 速度閉迴路控制示意圖(有感測) ...49 圖 5.11 1000rpm 和 3000rpm 轉速切換實作結果圖(RL =100Ω) ...50 圖 5.12 有感測穩態運轉實作波形(RL =100Ω) (a)1000rpm;(b)2000rpm;(c)3000rpm ...51 圖 5.13 有感測穩態運轉實作波形(RL =40Ω) (a)1000rpm;(b)2000rpm;(c)3000rpm ...52 圖 5.14 整體直流無刷馬達控制(有感測)流程圖 ...53 圖 5.16 Z 軸對準預設誤差值之示意圖 (a)0 度 (b)-9 度(c)9 度...54 圖 5.16 Z 軸對準誤差值為 9 度之實作波形(RL =100Ω) (a)1000rpm;(b)2000rpm;(c)3000rpm ...55 圖 5.17 Z 軸對準誤差值為 9 度之實作波形(RL =40Ω) (a)1000rpm;(b)2000rpm;(c)3000rpm ...56 圖 5.18 Z 軸對準誤差值為-9 度之實作波形(RL =100Ω) (a)1000rpm;(b)2000rpm;(c)3000rpm ...57 圖 5.19 Z 軸對準誤差值為-9 度之實作波形(RL =40Ω) (a)1000rpm;(b)2000rpm;(c)3000rpm ...58 圖 5.20 無感測穩態運轉實作波形(RL =100Ω) (a)1000rpm;(b)2000rpm;(c)3000rpm ...60 圖 5.21 無感測穩態運轉實作波形(RL =40Ω) (a)1000rpm;(b)2000rpm;(c)3000rpm ...61 圖 5.22 無感測之轉速切換實作 1000rpm~3000rpm (RL =100Ω) ...61 圖 5.23 整體直流無刷馬達控制(無感測)流程圖 ...62 圖 5.24 直流無刷馬達控制無感測啟動波形 (a)定電流模式;(b)定頻模式;(c)鎖相模式...64
表目錄
表目錄
表目錄
表目錄
表 2.1 特定旋轉角度 ...6 表 4.1 相關馬達模擬參數 ...35 表 4.1 樹枝狀 CORDIC 角度分佈 ...37 表 5.1 有感測跟無感測之功率比較(100Ω) ... 63 表5.2 有感測跟無感測之功率比較(40Ω)... 63第
第
第
第一
一
一
一章
章
章
章
緒論
緒論
緒論
緒論
1.1
研究背景與發展現況
研究背景與發展現況
研究背景與發展現況
研究背景與發展現況
在過去,直流馬達廣泛的被應用在各種場合上。直流馬達的優點在於控制容易,僅 改變電樞電壓就可改變轉速,而且馬達的轉矩都可維持定值在不同的轉速下。但直流馬 達最大的缺點在電樞位於轉子,須使用換向片與定子的碳刷接觸作為電流換向,故當馬 達旋轉時,兩者間的摩擦容易產生火花,此現象使得直流馬達不適用於某些場合,如在 於充滿粉塵的場所下,會有引發塵爆的可能。而且因摩擦造成的損壞,也使得碳刷須經 常維護或更換。近年來,一種名為直流無刷馬達(Brushless DC motor, BDCM)具有交流馬 達結構簡單、不需維護及沒有火花產生之優點,並且不具像感應馬達有滑差(slip)的缺 點,而效率也較感應馬達高,但最大的缺點在於控制較為複雜。但因隨著磁場導向控制(Field-Oriented Control, FOC)與微處理器的進步,也使得直流無刷馬達的實際應用逐漸
成熟。 在磁場導向控制中,由於電流在向量中分為磁場電流與轉矩電流兩分量因此參考轉 子磁場的方向,故轉子的位置是需要的。轉子位置可使外接的硬體裝置直接偵測,如光 編碼器,還有就是利用馬達參數、直流鏈電壓、電流訊號做無感測轉子角度估測。使用 光編碼器直接偵測的好處就是方便與簡單,但轉子偵測裝置除了有體積的增加和可靠性 的問題,解析度愈高的轉子角度偵測裝置所需的成本也愈高,還有就是對於環境容忍性 的不好而易損壞。而使用無感測的方式雖然需要比較複雜的演算法,但好的無感測控制 也是可提升直流無刷馬達系統,使得直流無刷馬達的應用更為廣範。 在歐美和日本的市場已出現不少此無感測控制IC作為馬達控制換向之技術基礎,如 日本TOSHIBA公司IC-TB6582FG為控制三相弦波型馬達直流無刷馬達風扇所設計、美國 IR公司所設計的IRMCK203為一高性能之直流無刷馬達無感測單晶片控制IC,近年來也 也推出IC-IRMCF341可跟微處理器8051集成一系統控制器的高效態晶片、MICROCHIP 公司的AN1078為一微控器可以控制ACIM、BDC、BLDC和PMSM等多穩馬達,而且它
其中的估測器運算也運用到CORDIC的方法,更可印証我們所使用的演算法可靠性提 升。雖然無感測IC的研發日益進步,也發展了不少產品,但台灣在這方面的研發仍究不 足,廠商所使用之馬達控制IC都是由日本或歐美所提供的,如此可知我國在這方面的研 究仍有很大的努力空間。
1.2
數位座標旋轉演算法
數位座標旋轉演算法
數位座標旋轉演算法
數位座標旋轉演算法
數位座標旋轉演算法(CORDIC),最早是應用在導航系統上,有了此演算法,使得 向量的旋轉和定運算無需作三角函數的查表、乘法、開平方和反三角函數一連串複雜的 運算,僅僅需要乘法、加法即建立少量的特定數值表即可達到所求。在直流無刷馬達控 制上,像 FOC 這類需要牽涉到向量和角度的控制,本來在實際上的應用是比較困難的, 但近年來因 FPGA 和 DSP 這類的即時運算數位控制器的成熟,使得此控制方法的實際 應用變得可行進而得以發展,而其中的向量控制也應用到了 CODIC 演算法。本篇論文 中馬達無感測控制中,在使用馬達的參數運算得來的轉子估測誤差值,便為一反三角函 數值,若直接使用其中之函數運算會耗費大量的時間,故使用數位座標旋轉演算法來作 式子的運算。
1.3 無位置感測電流控制
無位置感測電流控制
無位置感測電流控制
無位置感測電流控制
參考文獻[14]-[15]整理目前所使用之無感測控制方法大致上可以分為三大類,第一 類是量測定子之反抗電動勢。因為反抗電動勢與轉子的位置有關係,可以去偵測反抗電 動勢來推得到轉子的位置。但是此類的方法大多是只能用在電流不連續之直流無刷馬達 上,並不合適在弦波電流控制之直流無刷馬達。第二類之無感測方式是以直流無刷馬達 的數學模型為出發點,以內部之參數如端電壓、電流、電感和內部電阻等,設計一觀察 器和卡曼濾波器,或者是以直接計算估測方式來得到轉子位罝。這類方法通常是需要大 量的運算或者需特殊之演算法來輔助運算,其性能方面跟參數和訊號之量測的準確性有 很大的關聯。而最後一類是為只適用於凸極式直流無刷馬達的方法,利用凸極式直流無線圈中,再使用外部電路處理所偵測到之高頻訊號來得到轉子位置,此類方法有會有因 高頻訊號而有轉矩鏈波之產生。
1.4 論文架構
論文架構
論文架構
論文架構
說明本篇論文之組織架構 第一章為研究背景、現況發展和研究目的 第二章為介紹無感測控制器所使用之數位轉換座標演算法(CORDIC) 第三章為介紹馬達模型分析和控制,及本論文所使用之無感測控制架構。 第四章為本論文之所有電路模擬。 第五章為本論文之所有電路實作。 第六章為本論文之結論、如何進一步改善之建議和未來研究方向。第二章
數位座標旋轉演算法
本篇論文於位置誤差角度計算,是所應用無位置感測弦波電流控制之關鍵部份。但 由於牽涉到反正切函數(arctan)之計算,在數位系統上不易實現。直覺方式先使用除法 後,再根據結果查表得到,但一來除法相當耗時間,又有誤差;二來又需耗用相當記憶 體空間儲存反正切函數的表,因此不易實現。本論文擬採用 CORDIC (Coordinate Rotation Digital Computer, 稱為座標旋轉數位演 算法)計算該反正切函數的結果。該方法是一個適用於數位系統上實現的演算法,可以 根據輸入向量之xy座標,僅使用加法器、位移暫存器與特定角度之建表,即可經由有 限次數的遞迴運算(即有限次數的座標軸旋轉後),使初始輸入之xy向量與最終座標軸之 x 軸接近。隨後計算疊代過程中之所有旋轉角度總和,即可獲得該反正切函數對應之角 度大小。
2.1 座標軸旋轉
座標軸旋轉
座標軸旋轉
座標軸旋轉
圖 2.1 為座標軸旋轉示意圖,在 xy 座標軸下,該點座標為(x ,0 y );當0 xy座標軸 順時間旋轉α 角度成為x' y'座標軸,該點座標之標示變為( ' 0 x ,y ),則(0' x0, y0)與 ( ' 0 x ,y )之關係為 0'
−
=
−
=
0 0 0 0 ' 0 ' 01
tan
tan
1
cos
cos
sin
sin
cos
y
x
y
x
y
x
α
α
α
α
α
α
α
(2.1) 由上面的矩陣關係式,我們可以發現是每個向量的旋轉是由四個乘法器和兩個加法 器所構乘的數位運算,如圖2.2所示。x y ' x ' y ) , (x0 y0 ) , (x0' y0' α 圖 2.1 座標軸旋轉示意圖 圖 2.2 座標旋轉軸運算示意圖 2.2 特定旋轉角度特定旋轉角度特定旋轉角度特定旋轉角度 在某些特定旋轉角度,其正切函數之值恰為 2 之負整數次方,如 1, 1/2, 1/4…等等, 如表 2.1 所示。正切函數值為 0.5 時,該角度約為 26.565 度,比 45/2 度來得大。當座標 軸旋轉角度為這些特定角度,因此將(2.1)式改寫為
+
−
=
−
=
=
− − 0 0 0 0 0 0 ' 0 ' 0 '' 0 '' 02
2
1
tan
tan
1
cos
x
y
y
x
y
x
y
x
y
x
n nα
α
α
(2.2) 關注這些角度有一個好處,就是當座標軸旋轉角度為這些特定角度時,在數位實現 上可以使用簡單的加法與右移(Right Shift)指令,即可以得到新的座標結果,而不需要使 用耗資源之乘法器或乘法指令即可得到結果。 其示意圖如圖 2.3 所示,雖然經過此簡單計算所得到之座標( '' 0 x , y )與原座標0'' (x ,0 y )不是同一點,向量長度增加為0(cos
α
)
−1倍,但其對應之向量角度而言,並沒有改變;也就是說,對於反正切函數(arctan)或是其他三角函數之計算而言,當座標軸旋轉 角度為這些特定角度時,並不會使計算結果改變。 x y ' x ' y ) , (x0 y0 α ) , (x0'' y0'' 圖2.3 座標軸旋轉示意圖 表2.1特定旋轉角度 i i i − =2 ) tan(α αi (in degree) i α (in Q15) ∏= i n 0 n ) cos( 1 α 0 ±1 ±45∘ ±8192 1.4142 1 ±1/2 ±26.565∘ ±4836 1.5811 2 ±1/4 ±14.036∘ ±2555 1.6298 3 ±1/8 ±7.1250∘ ±1297 1.6425 4 ±1/16 ±3.5763∘ ±651.051 1.6457 5 ±1/32 ±1.7899∘ ±325.843 1.6465 6 ±1/64 ±0.8953∘ ±162.961 1.6467 7 ±1/128 ±0.4476∘ ±81.4857 1.6467 8 ±1/256 ±0.2238∘ ±40.7435 1.6468 9 ±1/512 ±0.1119∘ ±20.3718 1.6468 10 ±1/1024 ±0.0560∘ ±10.1859 1.6468
2.3 CORDIC 演算法
演算法
演算法
演算法
首先,根據原座標(x ,0 y )之0 x0 y 乘積之正負值,決定接下來之座標軸旋轉角度為0 +45 度,或是-45 度。以圖 2.1 為例,由於x 、0 y 皆為正,因此第一次座標軸旋轉角度0 為+45 度。旋轉完後之新座標(x ,1 y ) 1
+
−
=
+
−
=
− − 0 0 0 0 0 0 0 0 0 0 1 12
2
y
x
y
x
y
x
y
x
y
x
(2.3) 接下來,根據新座標(x ,1 y )之1 x1 y 乘積之正負值,決定接下來之座標軸旋轉角度1 為+26.565 度,或是-26.565 度。以圖 2.1 為例,由於x1 y 乘積為負,因此第二次座標軸1 旋轉角度為-26.565 度。旋轉完後之新座標(x ,2 y ) 2
+
−
=
− − 1 1 1 1 1 1 2 22
2
y
x
y
x
y
x
(2.4) CORDIC 演算法在 N 次疊代設定下,依照上述這些步驟進行疊代,
<
+
>
−
=
0
1
0
,
1
i i i i iy
x
when
y
x
when
d
(2.5)
+
−
=
− − − − − − − − − − 1 1 1 ) 1 ( 1 1 ) 1 ( 12
2
i i i i i i i i i iy
x
d
y
d
x
y
x
(2.6) 最終,原座標(x ,0 y )對應之角度0 θ,可近似為 1 1 0 1 0...
− − ==
±
±
±
±
∑
−
≈
N N i i id
α
α
α
α
θ
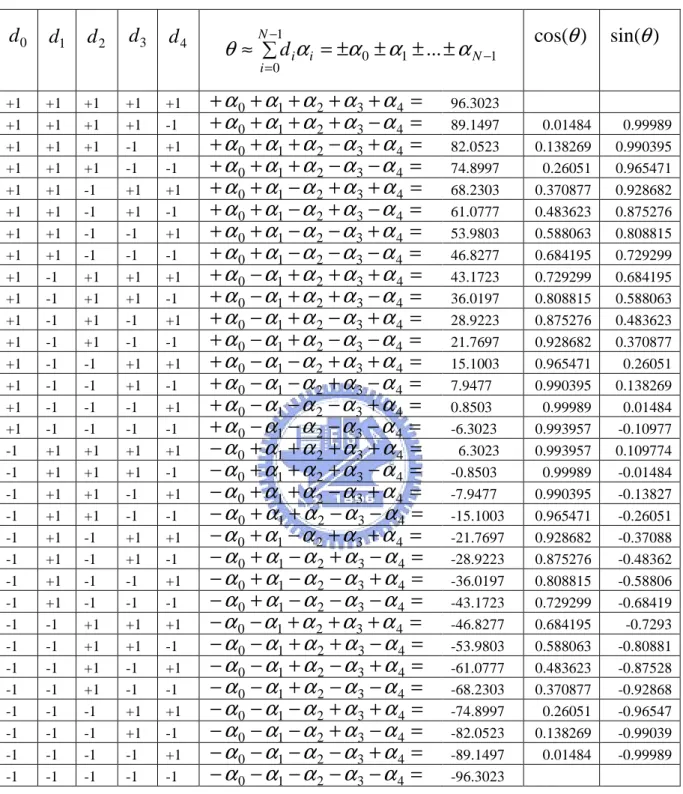
(2.7) 圖 2.4 為經過 N=5 次後之角度分布圖,很明顯地,由於這些特定旋轉角度並沒有經 過平均分配,因此,在某些區間發生重疊現象(Overlapping Branches)[16]。圖 2.4 經 5 次疊代後之樹枝狀 CORDIC 角度分布圖[16] 表 2.2 列出了經過 N=5 次後,共
2
5=32 種可能之 CORDIC 角度分布與其對應之正 餘弦函數。除了某些區間發生重疊現象(Overlapping Branches)[16]值得注意以外,其某 些角度會超過±90 度之範圍以外,因此實際有效 CORDIC 角度不到 32 種。 此外,經過這些演算,y
N會趨近 0,x
N會趨近原來座標(x ,0 y )長度0 x02+ y02 之 1.6465 倍[74](約 3/5 倍)。因此,在取x ,0 y 數值時,應考慮此現象,不要以 0x7FFFH 為0 基值,最少應以 0.6 倍為基值,必免演算後,x
N出現溢位現象,影響計算值。舉一例子,作八次的 CODIC 的運算,說明其過程。取角度 60 度作運算: ° =60 θ θ=15° ° − = 11.56 θ ° =2.47 θ ° − = 1.0737 θ ° =0.7162 θ ° − = 0.17897 θ ° − = 4.65 θ 圖 2.5 八次疊代之 CORDIC 運作方式 圖 2.5(a)~(h)的運算式子為以下表示(利用式子 2.5 和 2.6): (a): 866 . 0 5 . 0 0 0 = = y x ⇒ d0 =−1,θ0 =45° (b): 366 . 0 5 . 0 * ) 2 1 ( * ) 1 ( 866 . 0 366 . 1 866 . 0 * ) 2 1 ( * ) 1 ( 5 . 0 1 1 1 1 1 1 = − + = = − − = − − y x ⇒ d1 =−1,θ1=26.565° (c): 317 . 0 366 . 1 * ) 2 1 ( * ) 1 ( 366 . 0 549 . 1 366 . 0 * ) 2 1 ( * ) 1 ( 366 . 1 2 1 2 2 1 2 − = − + = = − − = − − y x ⇒ d2 =1,θ2 =14.036°
(d): 07025 . 0 549 . 1 * ) 2 1 ( * ) 1 ( 317 . 0 62825 . 1 ) 317 . 0 ( * ) 2 1 ( * ) 1 ( 549 . 1 3 1 3 3 1 3 = + − = = − − = − − y x ⇒ d3 =−1,θ3 =7.125° (e): 1332 . 0 62825 . 1 * ) 2 1 ( * ) 1 ( 07025 . 0 637 . 1 07025 . 0 * ) 2 1 ( * ) 1 ( 62825 . 1 4 1 4 4 1 4 − = − + = = − − = − − y x ⇒ d4 =1,θ4 =3.5763° (f): 03088 . 0 637 . 1 * ) 2 1 ( * ) 1 ( 1332 . 0 645325 . 1 ) 1332 . 0 ( * ) 2 1 ( * ) 1 ( 637 . 1 5 1 5 5 1 5 − = + − = = − − = − − y x ⇒ d5 =1,θ5 =1.79° (g): 02054 . 0 645325 . 1 * ) 2 1 ( * ) 1 ( 03088 . 0 64629 . 1 ) 03088 . 0 ( * ) 2 1 ( * ) 1 ( 645325 . 1 6 1 6 6 1 6 = + − = = − − = − − y x ⇒ d6 =−1,θ6 =0.8951° (h): 007678 . 0 64629 . 1 * ) 2 1 ( * ) 1 ( 02054 . 0 64645 . 1 ) 02054 . 0 ( * ) 2 1 ( * ) 1 ( 64629 . 1 7 1 7 7 1 7 = − + = = − − = − − y x ⇒ d7 =−1,θ7 =0.4476° 最後把(a)~(h)的式子結果d 和i θi全代入2.7式,此時可以得到: ° = ° − ° − ° + ° + ° − ° + ° − ° − − = 63 . 60 ) 4476 . 0 89517 . 0 79 . 1 5763 . 3 125 . 7 036 . 14 565 . 26 45 ( θ 其最終θ 的值跟我們所預設的60°相當接近,誤差不超過1°也足夠實作所需之精 度,當然隨著疊代的增加,我們所達到的精度也會提高,但也要考慮其運算量也會跟著 增加,使處理器的資源耗費也提高,兩者的平衡也是要去考慮的。
第
第
第
第三
三
三
三章
章
章
章
無位置感測
無位置感測
無位置感測
無位置感測弦波
弦波
弦波
弦波電流控制
電流控制
電流控制
電流控制
根據文獻資料[1-13]評估,雖然有為數眾多之弦波電流控制技術被提出來,但是考 慮控制架構實現之簡單度與必須適用性,決定選擇文獻資料中[6]所提出之〝擴展感應電 壓(Extended Electromotive Force, EEMF)〞作為接下來本篇文章之控制架構。並介紹馬達 的模型與控制架構。 3.1 擴展感應電壓擴展感應電壓擴展感應電壓擴展感應電壓(Extended EMF) 有關直流無刷馬達之模型推導,當採用同步參考座標軸,且此參考座標 d 軸固定 於轉子最大磁通處時,如圖 3.1 所示,故此直流無刷馬達的主導電壓方程式為(3.1)式:
+
⋅
⋅
−
+
⋅
⋅
+
=
00
E
i
L
i
L
i
L
i
L
p
i
i
r
V
V
d d q q r q q d d q d q dω
(3.1) 其中 Ld、Lq分別為 d-q 軸的電感;Vd、Vq表為 d-q 軸的電壓;i
d、i
q表為 d-q 軸的電流;r 是定子繞組;p 是微分符號;
E
0是實際感應電壓(Electromotive Force, EMF)在 q 軸的 大小,實際感應電壓在 d 軸的電壓大小為零。ωr為轉子磁場角速度,亦為此同步參考 座標軸之旋轉角速度,單位為 rads/sec。若馬達極數為 P,則馬達實際轉速應為 P r m ω ω =120 (rpm) (3.2) 若馬達無凸極效應,即無所謂 Ld、Lq電感之分別,亦即L=Ld =Lq。此時(3.1)式 可簡化為
+
−
+
+
=
00
E
i
i
L
i
i
pL
i
i
r
V
V
d q r q d q d q dω
(3.3)qc q dc d 1 ω θˆ ∆ θˆ ∆ 圖 3.1 同步參考座標 dc-qc 軸與 d-q 軸之相對關係 經由加減項,而不改變等式間的關係。電壓方程式(3.1)可以另外整理為 ⋅ − + ⋅ − + + − + + = d q d r q d q d q q r q d d q d q d i L L i L L p E i i L i i pL i i r V V ) ( ) ( 0 0 ω ω (3.4) 對照(3.3)與(3.4)式,發現十分類似;其中(3.4)式第四項可視為感應電動勢項,但包 含實際感應電動勢
E
0和凸極效應項(Salient pole)p
(
L
q−
L
d)
⋅
i
q+
ω
r(
L
d−
L
q)
⋅
i
d 的 總和,參考資料[64-71]中稱為擴展感應電壓(Extended EMF)E
0x,其等式為: d q d r q d q xE
p
L
L
i
L
L
i
E
0=
0+
(
−
)
⋅
+
ω
(
−
)
⋅
(3.5)3.2 馬達中
馬達中
馬達中
馬達中電感和電壓
電感和電壓
電感和電壓
電感和電壓參數推導
參數推導
參數推導
參數推導
圖 3.2 的馬達模型中,每相的電感和電壓值方程式如下一一介紹: 定子中的相磁交鏈可以表示為(2.1)式: a r s a ls a rl i N i L cos2 ) 2 ( 2 2 1 0 2 θ α α πµ λ − + = (3.6) 其中: α1、α2:馬達氣隙長度常數(當 1 2 1 ) (α −α − 時為最長, 1 2 1 ) (α +α − 為最短) l:矽鋼片疊積厚度 r:馬達氣隙位置半徑 µ0:導磁係數 Lls:漏磁電感 圖3.2 二極三相的直流無刷馬達每相的自感可以表示為(3.7)式: cos2 ) 2 ( 2 2 1 0 2 r s ls aa rl N L L πµ α −α θ + = (3.7) 而每相的互感可以表示為(3.8)式: )) 3 ( 2 cos 2 ( 2 2 1 0 2 π θ α α πµ + − − = r s ab rl N L (3.8) 由上面的(3.6)到(3.8)這三個式子,我們可以把一些值作替換: 0 1 2 2 πµ rlα N LA s = (3.9) 0 2 2 2 2 1 πµ α rl N LB s = (3.10) 永磁式同步馬達三相磁交鏈方程式如式子(3.11)所示: λa =Laaia +Labib +Lacic +λam λb =Lbaia +Lbbib +Lbcic +λbm (3.11) λc =Lcaia +Lcbib +Lccic +λcm 永磁式同步馬達磁交鏈方程式用矩陣形式(3.12)表示:
其中: + − + + − − + − − + − − − − + − − − + − − − − − − + = ) 3 2 ( 2 cos ) ( 2 cos 2 1 ) 3 ( 2 cos 2 1 ) ( 2 cos 2 1 ) 3 2 ( 2 cos ) 3 ( 2 cos 2 1 ) 3 ( 2 cos 2 1 ) 3 ( 2 cos 2 1 2 cos π θ π θ π θ π θ π θ π θ π θ π θ θ r B A ls r B A r B A r B A r B A ls r B A r B A r B A r B A ls s L L L L L L L L L L L L L L L L L L L L L L + − = = ) 3 2 sin( ) 3 2 sin( sin π θ π θ θ λ λ λ λ λ r r r m cm bm am abcf ∫ + =t r r r d 0 ) 0 ( ) (τ τ θ ω θ 介紹直流無刷馬達三相電壓方程式如式子(3.13)所示: va =r⋅ia + pλa vb =r⋅ib + pλb (3.13) vc =r⋅ic + pλc
3.4 同步
同步
同步
同步旋轉
旋轉
旋轉
旋轉軸參考座標
軸參考座標
軸參考座標
軸參考座標 d-q 軸
軸
軸
軸
同步旋轉軸參考座標下將三軸轉換成兩軸的數學表示式為(3.14): abc s dq K f f 0 = (3.14) 式中[
]
T o d q qd f f f f 0 =[
]
T c b a abc f f f f = 轉換矩陣 r s K 為: + − + − = 2 1 2 1 2 1 ) 3 2 sin( ) 3 2 sin( sin ) 3 2 cos( ) 3 2 cos( cos 3 2 θ θ π θ π π θ π θ θ r r r r r r r s K 反轉換矩陣Ksr−1為: + + − − = − 1 ) 3 2 sin( ) 3 2 cos( 1 ) 3 2 sin( ) 3 2 cos( 1 sin cos ) ( 1 π θ π θ π θ π θ θ θ r r r r r r r s K 在 同 步 旋 轉 座 標 下 的 直 流 無 刷 馬 達 電 壓 方 程 式 為 (3.15) :[
]
[
]
0 0 0 0 1 0 0 1 0 0 1 0 1 0 1 ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( d q qd r qd d q r s qd r s r s q d r s r s qd qd r s qd r s qd r s p ri p K K p K i K r K v K p i K r v K λ λ ω λ λ λ + + = + + = ⇒ + = − − − − − (3.15) 其中: λqd0 =[
λd −λq 0]
d-q軸上電壓方程式為(3.16): vqd0 =riqd0 +ωrλqd0+ pλqd0 (3.16)af qd r s s qd r s af abc s abc i K L K i L λ λ λ λ + + ⇒ + = − − 0 1 0 1 ) ( ) ( (3.17) + = + = ⇒ − 0 1 0 0 0 0 0 0 0 ) ( 0 1 0 d af q ls d q af r s r s s r s qd i i i L L L K K L K λ λ λ 其中: ) ( 2 3 ) ( 2 3 B A ls d B A ls q L L L L L L L L + + = − + = q-d軸電壓方程式展開: 0 0 0 λ λ λ ω λ λ ω p ri v p ri v p ri v d q r d d q d r q q + = + − = + + = q-d軸磁交鏈方程式展開: 0 0 L i i L i L ls m d d d q q q = ′ + = = λ λ λ λ 最後把q-d軸電壓方程式整理得出為(3.18): + + + − + = 0 0 0 0 0 0 0 0 af r d q ls d q r d r q d q i i i pL r pL r L L pL r v v v ω λ ω ω (3.18) 直流無刷馬達電壓方程式經過轉換後,其中v0軸表為零相序的量,當系統平衡時為零, 其方程式可表整示為(3.19): + + − + = af r q d q d r q r d q d i i pL r L L pL r v v λ ω ω ω 0 (3.19) 此時直流無刷馬達的轉矩Te為(3.20):
[
d q q d af q]
d q q d e L L i i i P i i P T = 3 (λ −λ )=3 ( − ) +λ (3.20)其中: d q v v、 :為同步旋轉座標軸的定子電壓 d q i i、 :為同步旋轉座標軸的定子電流 d q L L、 :為同步旋轉座標軸的電感值 p:為 dt d P :為極數
3.5 假想同步參考座標
假想同步參考座標
假想同步參考座標
假想同步參考座標 dc-qc 軸
軸
軸
軸
在無位置感測控制中,轉子角度位置和角速度ωr是不可直接量測的。故研究方法 是先假想同步參考座標 dc-qc 軸,作為公式推導的開始。此同步參考座標 dc-qc 軸與同 步參考座標 d-q 軸之間角度誤差∆θ 為 d dc θ θ θ = − ∆ (3.21) 其中,θdc表示從固定座標軸的α 軸到同步參考座標 dc 軸的角度;θd表示從固定座標 軸的α 軸到同步參考座標 d 軸的角度。假設此同步參考座標 dc-qc 軸之旋轉角速度ω1, 且同步參考座標 d-q 軸之旋轉角速度ωr,則角度差∆θ 之一次微分等於兩同步參考座標 旋轉角速度之差 r dt d∆θ =ω −ω 1 (3.22) 使用軸角度誤差∆θ 之關係,同步參考座標 d-q 軸推導之電壓方程式(3.1),可表示 為(3.23)式:
∆
∆
+
−
+
−
−
+
=
θ
θ
ω
cos
sin
0 1E
i
i
L
L
L
L
i
i
L
L
L
L
p
i
i
r
V
V
dc qc dc dqc dqc qc qc dc qc dqc dqc dc qc dc qc dc (3.23) 其中Ldc,Lqc和Ldqc 不是固定值,而會隨參考軸角度誤差∆θ 改變,其關係為:(
) (
)
[
]
(
) (
)
[
]
(
)
sin2 . 2 1 2 cos 2 1 2 cos 2 1θ
θ
θ
∆ − = ∆ − − + = ∆ − + + = q d dqc q d q d qc q d q d dc L L L L L L L L L L L L L (3.24) 根據圖 3.1,在同步參考座標 d-q 軸中計算所得之量[
Fd Fq]
T 與在同步參考座標 dc-qc 軸中計算所得之量[
Fdc Fqc]
T具有以下之線性關係
∆
∆
∆
−
∆
=
=
qc dc qc dc q dF
F
F
F
M
F
F
θ
θ
θ
θ
cos
sin
sin
cos
(3.25) 因此
−
∆
∆
∆
−
∆
=
−
=
−
dc qc dc qc d qF
F
F
F
M
F
F
θ
θ
θ
θ
cos
sin
sin
cos
(3.26) 且關係矩陣M
之一次微分為dt
d
dt
d
T
dt
dM
θ
θ
θ
θ
θ
θ
∆
∆
−
∆
∆
−
∆
−
=
∆
=
sin
cos
cos
sin
(3.27) 其中
−
=
−0
1
1
0
1T
M
(3.28)利用(3.27)-(3.28)之轉換關係,d-q 軸之電壓關係(3.4)式,可以轉換到以 dc-qc 軸的 電壓方程式:
+
−
+
+
∆
+
=
+
−
+
+
+
=
+
−
+
+
=
x dc qc q r qc dc d qc dc d qc dc x dc qc q r qc dc d qc dc d qc dc x dc qc q r qc dc d qc dc qc dcE
i
i
M
L
I
I
Mp
L
I
I
dt
d
T
L
I
I
rM
E
i
i
M
L
I
I
Mp
L
I
I
dt
dM
L
I
I
rM
E
i
i
M
L
I
I
M
pL
I
I
rM
V
V
M
0 0 00
)
(
0
)
(
0
)
(
ω
θ
ω
ω
(3.29) (3.29)等式左右各乘上M
−1項,(3.29)可以變為
+
−
+
+
∆
+
=
− − − − − − x dc qc q r qc dc d qc dc d qc dc qc dcE
M
i
i
M
M
L
I
I
Mp
M
L
I
I
dt
d
T
M
L
I
I
M
rM
V
V
M
M
0 1 1 1 1 1 10
ω
θ
(3.30) (3.30)可以進一步簡化為
−
−
∆
+
∆
∆
+
−
+
+
=
−
∆
+
−
−
−
∆
∆
+
−
+
+
=
∆
∆
+
−
+
+
∆
−
+
=
dc qc q d x x dc qc q qc dc d qc dc dc qc d dc qc q r x x dc qc q qc dc d qc dc x x dc qc q r qc dc d qc dc d qc dc qc dcI
I
L
L
dt
d
E
E
I
I
L
I
I
pL
I
I
r
I
I
dt
d
L
I
I
L
E
E
I
I
L
I
I
pL
I
I
r
E
E
I
I
L
I
I
pL
dt
d
I
I
L
I
I
r
V
V
)
(
cos
sin
)
(
cos
sin
cos
sin
0
1
1
0
0 0 1 1 0 0 1 0 0θ
θ
θ
ω
θ
ω
ω
θ
θ
ω
θ
θ
ω
θ
(3.31) 因此表示有關擴展感應電壓項E
0x,可整理為:
−
−
∆
−
−
−
−
=
∆
∆
⋅
dc qc q d dc qc q qc dc d qc dc qc dc xi
i
L
L
dt
d
i
i
L
i
i
pL
i
i
r
V
V
E
)
(
cos
sin
1 0θ
ω
θ
θ
(3.32) 由於無感測控制中,假想座標軸位置θ
dc可以知道,但需估計 d-q 軸之位置θ
d, 即轉子位置;換言之,根據(3.21)式,亦即估計正確之軸角度誤差∆
θ
即可,而不需要 確實計算延伸電動勢(EEMF)的估算值。因此我們可以利用正切函數(tangent function)關 係作方程式轉換, dc q d q qc d qc qc q d q dc d dci
dt
d
L
L
L
i
pL
r
V
i
dt
d
L
L
L
i
pL
r
V
⋅
∆
−
+
−
⋅
+
−
⋅
∆
−
+
+
⋅
+
−
=
∆
θ
ω
θ
ω
θ
)
(
)
(
)
(
)
(
tan
1 1 (3.33) 最後,位置誤差∆θ 之估計值為:
⋅
∆
−
+
−
⋅
+
−
⋅
∆
−
+
+
⋅
+
−
=
∆
− dc q d q qc d qc qc q d q dc d dci
dt
d
L
L
L
i
pL
r
V
i
dt
d
L
L
L
i
pL
r
V
θ
ω
θ
ω
θ
)
(
)
(
)
(
)
(
tan
1 1 1 (3.34) 在方程式(3.34)中,位置誤差∆θ與感應電動勢(EMF)的值無關。這也表示感應電動 勢 的 變 化 , 不 會 影 響 到 位 置 誤 差∆θ 的 變 化 。 另 外 , 在 無 凸 極 直 流 無 刷 馬 達 中 L L Ld = q = ;因此方程式(3.34)可簡化為
−
⋅
+
−
+
⋅
+
−
=
∆
− dc qc qc qc dc dcLi
i
pL
r
V
Li
i
pL
r
V
1 1 1)
(
)
(
tan
ω
ω
θ
(3.35) 如上述所提到的,位置誤差方程式(3.34)中是沒有任何的近似假設獲得而來的。然 而此方程式是無法應用在實際的微處理器控制上,因為方程式(3.34)中包含太多的微分 運算。一般而言,我們不會去牽涉到微分運算會比較好的原因是控制系統這樣才不會有不穩定的現象,如此一來感應器也不會得到雜訊成份。藉由忽略方程式(3.34)之微分項, 一個實際可用的位置誤差估計計算是便可獲得如下:
⋅
−
⋅
−
⋅
+
⋅
−
=
∆
− dc q qc qc qc q dc dci
L
i
r
V
i
L
i
r
V
1 1 1tan
ˆ
ω
ω
θ
(3.36) θˆ ∆ 是估測的位置誤差,明顯地,位置誤差在穩態下僅僅只用了兩個馬達參數r和 q L 就可以計算而得到。因此估測下一時刻之轉子位置為
⋅
−
⋅
−
⋅
+
⋅
−
+
−
=
− dc q qc qc qc q dc dc dc dci
L
i
r
V
i
L
i
r
V
k
k
1 1 1tan
)
1
(
)
(
ω
ω
θ
θ
(3.37)3.6
CORDIC-Based 無感測控制
無感測控制
無感測控制
無感測控制
目前所研擬之無感測弦波電流控制架構如圖 3.2 所示。根據(3.21),估算出參考軸與 實際馬達模型參考軸之誤差以後,先利用鎖相迴路(PLL)之原理,即時調整座標軸角頻 率ω
1,一方面加以積分,產生轉子位置θ
dc;另一方面,座標軸角頻率ω
1經過馬達極 數之調整倍數以後,可以作為目前轉速ωre估測使用。 Speed Controller d- axis Current Controller q- axis Current Controller 0 3 d-q Position Estimation PLL Calculation φ P 2 s 1 Ramp function dc 2 P b e c e Z M o to r a e b e ec L T e T G en era to r g R Z Z Z Z Z g R Rg a e θˆ ∆ a i b i 1 ω qc i dc i * dc I * qc I re ω * r ω * * r ω dc V qc V SPWM在無感測控制中,馬達如何從靜止到運轉也是一個課題,在這裡我們也配合位置 估測式加上 CORDIC 演算出來的角度誤差結果作啟動策略。在這個啟動策略裡,包含三 個主要的模式:定電流模式、定頻模式與鎖相模式。在定電流模式中,我們先給一定值 的定子電流,讓定子磁場去吸引轉子磁場帶起轉動,此時馬達中的位置訊號也是給一定 值的。而定頻模式中馬達的位置訊號,仍是維持前模式之定值,不同的是此時我們把定 子電流遞減,使定子磁場跟轉子磁場漸漸分離,然後此時就利用角度誤差來作檢查是否 要切換至鎖相模式,在角度誤差接近五度時我們會進入鎖相模式。進入鎖相模式後,此 時我們的位置訊號將由鎖相迴路控制器來給予,而電流之命令也將由速度和電流控制器 去作決定,其整個啟動之示意圖由圖 3.4 所示。 θˆ _ ,檢查∆ 減少Iq ref ∆θˆ <5° start r , ω ref q I _ 圖3.4 無感測弦波電流控制架構
3.7 位置感測器信
位置感測器信
位置感測器信號量測與分析
位置感測器信
號量測與分析
號量測與分析
號量測與分析
本篇文章雖然是無感測,在轉子位置偵測方面並無需外接硬體電路,但要了解馬達的 特性,還是要先從有感測作起,故我們還是要了解光編碼器是如何運作的,藉由馬達本身 的輸出各種訊號,可以了解馬達運作的狀態。一般的直流無刷馬達擁有三相接線,分別是 U、V、W以及中性線,以處理過的入電訊號即可控制馬達的轉速以及轉向。除了本身UVW 三相的接線之外,為了精準的測得馬達的位置,多會在傳動軸後附上感測的編碼器,方便 使用者從其訊號中分析目前的位置以及相關電流訊號。但由於馬達轉動的本身是電場跟磁場交互作用而形成的,難免會有不可預期的訊號產生,對於訊號傳送會造成干擾,因此除 了編碼器之外,訊號的隔絕也是需要探討的議題之ㄧ。
3.7.1 位置感測編碼器
位置感測編碼器
位置感測編碼器
位置感測編碼器
就一般的編碼器而言,會在馬達運轉時輸出規律的 high low 訊號,總共會有 A、B、
Z 三組的訊號輸出,Z 相訊號在馬達轉一圈時候才會出現一次,主要是用於定位,另外 兩組則是依據規格上的解析度輸出額定的數量。每一組的訊號皆會接上反向邏輯電路, 輸出相反的訊號,便於使用者以外接的差動放大電路來將馬達運轉時產生的雜訊濾除。 如同圖 3.5 所示,編碼器上通常有類似柵欄的結構,主用於對光訊號的控制,與馬 達傳動軸為同軸連結,可以確切的紀錄馬達軸心的運作情況。在馬達運轉的同時,可以 預期的狀況是如同圖 3.5 右側的訊號一般(沒有顯示反向的訊號),規律的輸出類似 PWM 的訊號。藉由每個方波之間的頻率變化以及 Z 軸的輸出,可以隨時測知馬達當前轉速的 變化以及位置,表 3.1 為此節所用編碼器腳位列表。 圖 3.5 編碼器的外觀以及輸出訊號 表 3.1 編碼器腳位列表 編碼器引線顏色對照表 引線顏色 綠 白綠 灰 白灰 黃 白黃 紅 黑 信號名稱 A /A B /B Z /Z + 5v 0v
3.7.2 差動放大訊號電路
差動放大訊號電路
差動放大訊號電路
差動放大訊號電路 AM26LS32
由上一節可以得知,訊號本身對於觀測者而言相當的重要,因此雜訊的阻絕是個值 得研究的方向。AM26LS32 是一顆差動放大器,故它具有可濾除雜訊之功用,本段即是 對這顆 IC 以及編碼器訊號的連結做一個探討。 如圖 3.6 所示,A、B 為一組相互反向的輸入訊號,以圖表 3.1 之訊號為例,1A 接 A(綠線)、1B 接/A(白綠線)。經過 3.6 的邏輯電路後,會將背景雜訊給清除。而 G 以及/G 是決定輸出訊號是否為反相,在此章節內之訊號 G 設定為+5v,而/G 設定為 GND。如下 圖 3.7 所示:將左邊的 A 與/A 坐相減後,因為訊號是經由同樣的傳輸路線,所以接收到 的背景雜訊也是相同的,在相減之後則會將這些雜訊給去掉,而輸出很單純的 0 或 1 兩 種訊號。 圖 3.6 AM26LS32IC 輸出腳位圖 圖 3.7 信號經 AM26LS32IC 輸入和輸出示意圖3.7.3 實際量測信
實際量測信
實際量測信
實際量測信號
號
號
號
上面兩段介紹了馬達編碼器的輸出與相對應的電路,接下來則是對另外一組接腳 U(A 相)、V(B 相)、W(C 相),我們進一步將他等效為一組固定 NS 磁極,而入電端相位 的改變對照此磁極作旋轉,就如同圖 3.8 一般。馬達軸心轉動的方向與三相入電的相序 有關,以不接電的方式轉動馬達,以馬達當成發電機來觀測輸出相序。將 U、V、W 以 Y 接的型態接上負載,探棒則皆在其中一項以及中性線兩點,可以觀測到馬達輸出的波 形,如圖 3.9。 圖 3.8 三相等效圖 圖 3.9 量測接線圖實際量測出來的訊號,會呈現出類似弦波的波形,波形與轉動時的速度與穩定度有 關。將三個輸出都接上探棒觀測,可以發現雖然呈現一樣的波形,但是彼此之間會有相 序上的差別,藉由三個波形彼此的相位差,便可判定其相序。馬達的極數可以從一圈裡 面的應電勢裡得知:兩極可以形成一個週期的弦波,計算轉一圈馬達可以得到多少個弦 波,再乘上 2 就是這顆馬達的極數了,圖 3.10 以及圖 3.11 為兩種不同極數的直流無刷馬 達所測得的波形。 圖 3.10 馬達(8 極) 圖 3.11 馬達(4 極)
從上面三段可以明白,欲控制一組馬達,可以從其應電勢找到三入電相位的相序差。 再藉由每圈一個突波的編碼器 z 軸訊號定位,得到當前馬達的位置、另外兩組編碼器則 可以確切的得知馬達的運轉狀況。
![圖 2.4 經 5 次疊代後之樹枝狀 CORDIC 角度分布圖[16] 表 2.2 列出了經過 N=5 次後,共 2 5 =32 種可能之 CORDIC 角度分布與其對應之正 餘弦函數。除了某些區間發生重疊現象(Overlapping Branches)[16]值得注意以外,其某 些角度會超過±90 度之範圍以外,因此實際有效 CORDIC 角度不到 32 種。 此外,經過這些演算, y N 會趨近 0, x N 會趨近原來座標( x , 0 y )長度0 x 0 2 + y 0 2 之 1.646](https://thumb-ap.123doks.com/thumbv2/9libinfo/8118847.165812/18.892.331.606.117.527/次後共之正餘弦函數除了某些區間發生重疊現象OverlappingBranches意以不到會趨.webp)