行政院國家科學委員會專題研究計畫 成果報告
總計畫及子計畫一:多模車機整合技術暨先進安全駕駛輔助
系統(I)
計畫類別: 整合型計畫 計畫編號: NSC93-2218-E-002-113- 執行期間: 93 年 08 月 01 日至 94 年 07 月 31 日 執行單位: 國立臺灣大學土木工程學系暨研究所 計畫主持人: 張堂賢 計畫參與人員: 楊瓅凱 曾依蘋 陳怡如等 報告類型: 精簡報告 處理方式: 本計畫可公開查詢中 華 民 國 94 年 9 月 19 日
PDFCMD Trial Version
www.zeon.com.tw
行政院國家科學委員會專題研究計畫成果報告
先進安全智慧車—[總計劃暨子計畫ㄧ]多模車機整合技術暨先進
安全駕駛輔助系統(I)
計 畫 編 號 :
NSC
93-2218-E-002-113-執 行 時 程 :
93 年 8 月 1 日至 94 年 7 月 31 日
計 畫 主持人:
張堂賢
國立台灣大學土木系 教授
共 同 主持人:
陳俊杉 王富正 連豊力 江簡富 曹壽民 許添本
計畫參與人員:
楊瓅凱 曾依蘋 陳怡如 鄭其政 劉宜傑等
(一)計畫摘要
研發課題分項如下: (1) 先進安全智慧車--多模車機整合技術暨先進駕駛輔助系統—結合車輛撞擊的警告與 避免裝置,以支援安全駕車,建立不正常駕駛或危險狀況警告系統、自動巡航自動 跟車控制系統等。並整合下述各功能車上單元機。<總計畫暨子計畫一> (2) 車身感應安全裝置--安全車身安全防護之主被動智慧材料裝置研發與應用。<子計畫 二> (3) 車體穩定控制系統--車體內部安全設施,針對車體內部不同結構及安全性,設置不同 形式偵防設施。例如懸吊控制,其涉及汽車動力系統錯誤自動診斷系統或主動式懸 吊系統控制晶片等。<子計畫三> (4) 交通應用之無線短距通訊技術--車對車、車對路邊交通資訊設施(標誌、號誌、施工 區或事故區等危險緊告無線設施)之無線短距通訊技術。<子計畫四> (5) 車載即時交通資訊平台--車輛全球定位、GPS/GIS 技術整合、長距通訊、即時交通路 況、緊急事故通報系統、停車資訊顯示。並進行週遭車流的微觀即時模擬預估塞車 等級、路徑規劃、旅行時間預估、資料庫系統等作業軟體工具箱等整合之。<子計畫 五、六>PDFCMD Trial Version
www.zeon.com.tw
(二)各子計畫關聯
本計畫重點研究車輛自主式安全偵測系統有研究壓電陶瓷材料與元件作為偵測車 輛側邊撞擊的感應元件<子計畫二>,研究懸吊動力以增加車行平穩性<子計畫三>;另外 研究分析以 DSRC(特定短距通訊)方式取得數公里內特殊或意外交通資訊,例如事故或 危險道路現場或交通號誌裝置主動信號發射機等<子計畫四>。以 GPS/GIS 技術整合長 距通訊取得即時交通路況、緊急事故通報資訊與停車資訊<子計畫五>,並做車流模擬< 子計畫六>、路徑規劃及旅行時間預估等<子計畫五>;最後研究分析車輛不正常行駛或 危險狀況決策模式、自動跟車控制模式系統等<總計劃暨總計畫一>,並結合前面多種偵 測技術,完成多模車機規劃與製作<總計劃暨總計畫一>,其與各子計畫之關聯如(圖 2.1) 所示。 圖 2.1 本計畫與各子計畫之關聯示意圖 <子計畫二>壓電陶瓷 元件應用於側方來車 偵測之研究 <子計畫三>慣質之研究及 汽車懸吊系統之控制應用 <子計畫四>以整合 無線通訊技術與車 行安全資訊為基礎 之智慧型駕駛資訊 通訊協定之研究 <子計畫五>車載 即時交通資訊作 業資料庫建立 <總計畫暨子計畫一>多模 車機整合技術暨先進安全 駕駛輔助系統 <子計畫六>汽車週遭環 境安全及車流績效之即 時模擬預測元件之開發PDFCMD Trial Version
www.zeon.com.tw
(三)計畫年度報告
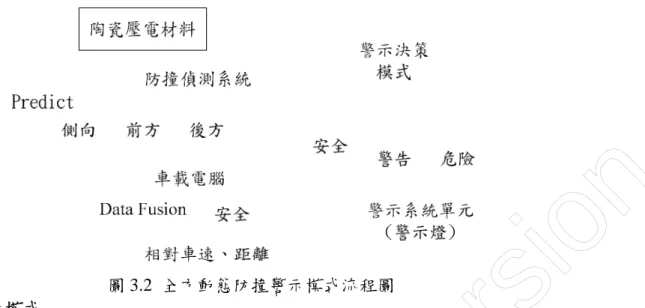
@ 總計畫暨子計畫一:多模車機整合技術暨先進安全駕駛輔助系統 在眾多的肇事原因中,人為因素佔了相當高的比例,大部分都會導致相似的外在車 輛行為,例如「與前車距離過近」與「偏離所在車道」。本計畫將製作模式即時研判行 車狀況是否具有潛在危險,必要的情況下發出適當的警示,並研發主動式車行控制之機 制。如(圖 3.1)所示,當車道偏離與車輛追撞警告暨防止機制控制之系統主要將由<子計 畫一>車載之 CCD 攝影機拍攝車道與前導車影像,透過車載電腦準系統之即時影像處理 之後,取得對於車道線的側向相對速度(U )與相對間距(r Y )r ;以及對於前導車的縱 向相對速度(V )與相對間距(r X )。輸入本警告系統之決策模式自動判斷目前行車狀況之r 危險等級。若達臨界範圍,便啟動駕駛者警示系統,達到防止意外事故之目的。決策邏 輯判定係利用模糊類神經網路的學習演算。其演算結果將車輛之跟路行為由淺至深分為 「非偏離車道」、「趨近車道線」、「即將偏離車道」,並在得到「即將偏離車道」之時, 提出適當警示。 基本上,汽車的防撞系統有兩類,第一類為主動式(active type)汽車防撞系統,該系 統在意外發生前,自動控制車子行進方向以防止意外產生。第二類為被動式(passive type) 汽車防撞系統,該系統於意外發生前,發出警訊,以便由駕駛者控制車輛行進方向。被 動式汽車防撞系統為主動式汽車防撞系統之基礎,因此本研究先由被動式汽車防撞系統 執行。而本計畫之後續目標為建構出一個實際可行的汽車安全輔助駕駛系統,因此,本 研究將以實用為導向。 臨界值 臨界值 側 向 間 距 車道偏離或變換車道 相對穩定 絕對穩定 時間T 0 Y w/2 w/2 圖 3.1 車輛行進軌跡示意圖之一 @ 第一年研究已完成工作: 1. 全方位動態防撞警示模式建立 全方動態防撞警示模式包含側向防撞模式及預估碰撞模式,其流程如(圖 3.2)。PDFCMD Trial Version
www.zeon.com.tw
圖 3.2 全方動態防撞警示模式流程圖 (1) 側向防撞模式 車輛在直線行進中,可能因為駕駛者駕駛習慣、駕駛目的、身心狀況或車輛本身駕 駛系統等等因素,而影響車輛行進方向不能完全筆直前進,造成車輛行進方向有些偏 離,使得原縱向行進方向速度減少,而車輛偏離車道的側向速度增加,如(圖 7)所示。 此時,當車輛偏離某一方向時,在此方向上的警示範圍亦需擴大,以確保駕駛者行車安 全,如(圖 3.3)右側放大圖示,藍色標圈及紅色標圈所示。 圖 3.3 車輛行進方向速度影響全方位動態警示區域概念圖 橘色車輛行進方向有偏向,故有一側向速度 1.4m hr,縱向速度為 59.8km hr,而黄色 車輛行進方向無偏離,因此縱向速度仍保持 60km hr,而側向速度為零。 偵測側向來車的方法,是利用壓電式材料,如(圖 3.4) <子計畫二>,通電後發射出超音 波感測,其感測角範圍為 0 至 120 度,距離為 1 至 5 公尺。由於感測範圍受角度與距離 之限制,無法將所定義之側向位置範圍內面積全部測得,以長度 4m 的車輛、感測距離 1m 之壓電材料為例,其應測得理想面積為 4m*1m=4m2,如(圖 3.5)所示。但受壓電材料 為扇形幾何之限制,使其應量測範圍內產生盲點面積(圖 3.6),本研究將此盲點面積分為 白色區塊以及紅色區塊,白色區塊為距裝載車 0.5m 內之盲點面積;紅色區塊即為其餘 盲點面積。在相同壓電材料單元數目下,無論其感測距離為多少,白色區塊盲點面積皆 相同;而紅色區塊盲點面積則因材料數目有所改變。
PDFCMD Trial Version
www.zeon.com.tw
Onboard equipment (OBE) 陶瓷壓電材料 Onboard equipment (OBE) 陶瓷壓電材料 Onboard equipment (OBE) Onboard equipment (OBE) 陶瓷壓電材料 圖 3.4 硬體設備概念圖 圖 3.5 理想壓電材料感測範圍 圖 3.6 受限壓電材料產生之盲點面積 壓電材料單元數目、佈設位置與盲點面積大小有密不可分的關係。(圖 3.6)中,兩個 壓電材料單元無論如何配置,最小白色區塊盲點面積皆為 1.134 m2;最小紅色區塊盲點 面積皆為 0.772 m2。在(圖 3.7(a)、(b))中,放置三個壓電材料單元於不同位置,(圖 3.7(a)) 分別設置於車頭、車身中央及車尾;(圖 3.7(b))設置於車身中央,其餘兩個與之相接,(圖 3.7(b))之白色區塊盲點面積為 0.907 m2;紅色區塊盲點面積為 0.762 m2,且由圖中觀察 可知,(圖 3.7(b))白色、紅色區塊盲點面積皆小於(圖 3.7(a))。
PDFCMD Trial Version
www.zeon.com.tw
(a) 佈設位置 a (2 3, 0) (2, 0) (2 3, 0)
x
y
(2 3, 1) (b) 佈設位置 b 圖 3.7 三個壓電材料單元與其佈設位置 (圖 3.8)中,佈設四個壓電材料單元於不同位置,左圖放置在車頭、車尾兩處,其餘 兩個等分放置於車身中;右圖四個等分放置於車身中。計算結果可知:左圖白色區塊盲 點面積為 0.770 m2,紅色區塊盲點面積為 0.321 m2;右圖白色區塊盲點面積為 0.647 m2, 紅色區塊盲點面積為 0.262 m2。 由以上結果觀察分析可知:當壓電材料單元數目越多時,白色、紅色區塊盲點面積 將越小,換句話說,當車身佈設無限多個壓電材料單元時,白色、紅色區塊盲點面積將 為零,其所能偵測範圍即為定義之側向位置範圍內所有面積。 圖 3.8 四個壓電材料單元與其佈設位置圖 利用超音波方式來感測側車,從中獲得與側向來車關係之資訊,為裝載車與被感測 之側向車之間的相對距離(Dr)。然而建立側向警示區域,尚需裝載車與被感測之側向車 之間的相對速度(Vr),再配合駕駛者反應時間(預設 1、2、3 秒),來建構動態側向防撞模 式。對於相對速度(Vr)資料的取得,理論上,是利用單位時間內所擷取相對距離的資料 筆數,來推求單位時間內的相對速度。由於車禍往往發生於駕駛者 1 秒間的疏忽或精神 不集中而造成,因此對於相對速度所得的時間間隔,亦不能超過 1 秒以上,此外,受制 於硬體設備計算量之限制及負載程度,在此對於資料擷取筆數,定為 10 筆/每秒(暫定, 往後還需實車測試,以求得最佳化之資料擷取筆數),而相對速度之計算量測間隔即為 十分之一秒。 警示區域的等級,最大範圍之推估,主要是依據相對速度與駕駛者反應時間相乘積PDFCMD Trial Version
www.zeon.com.tw
所得,如(圖 3.9)測得水平方向上的相對速度、(圖 3.10)構成的警示範圍所示。 圖 3.9 感測與側車之相對速度示意圖 圖 3.10 反應時間建立警示等級區域示意圖 而非最大範圍之警示區域建構,非最大範圍警示區域,意指非感測與側車最近 的位置,如(圖 3.11)所示。 圖 3.11 警示範圍—最大(主要)警示位置與非最大(次要)警示範圍示意圖 深藍色水平方向的立體箭頭位置,意指側車最靠近裝載車之處,為主要警示位置; 淺藍色垂直方向的立體箭頭範圍,指裝載車側向其他警示範圍,為次要警示範圍。 (圖 3.11)中警示範圍之構建原理,是依照一對一,二階方程式推求所得。主要是利 用側車最接近裝載車之距離及位置推求,首先,已知側車於裝載車平行方向及垂直方向 上的位置,如(圖 3.12)所示,再以平行方向上,最接近裝載車位置,建立最大警示距離, 其最大警示距離為測得之相對速度與駕駛者反應時間乘積所得,依據反應時間的寬裕程 度,建構警示等級與寬裕程度成反比的警示範圍,即反應時間越寬裕,其警示等級越小, 而警示範圍會越大,如(圖 3.10)所示,依照警示等級分類,紅色為第三級(危險),黃色 為第二級(警告),綠色為第一級(注意),無色則為第四級(安全);各等級所含蓋警示區域 大小,為無色>綠色>黃色>紅色,危險等級程度則為紅色>黃色>綠色>無色。
PDFCMD Trial Version
www.zeon.com.tw
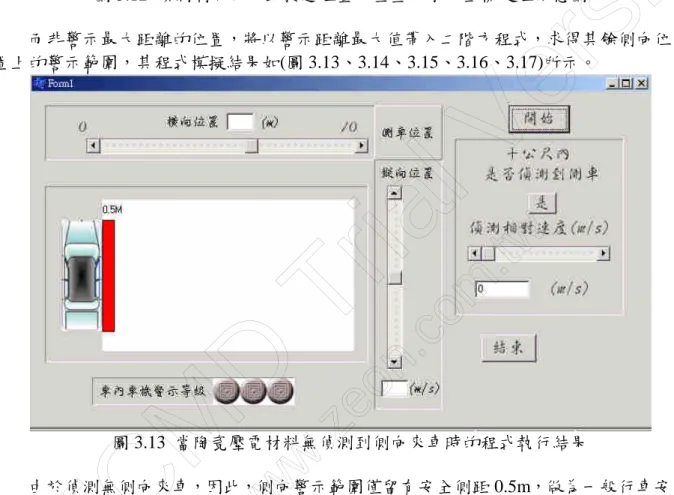
圖 3.12 偵測側向來車最接近位置,垂直及水平坐標定位示意圖 而非警示最大距離的位置,將以警示距離最大值帶入二階方程式,求得其餘側向位 置上的警示範圍,其程式模擬結果如(圖 3.13、3.14、3.15、3.16、3.17)所示。 圖 3.13 當陶瓷壓電材料無偵測到側向來車時的程式執行結果 由於偵測無側向來車,因此,側向警示範圍僅留有安全側距 0.5m,做為一般行車安 全之基礎,用以避免側向來車或障礙物與裝載車等速,而無法偵測相對速度,來提醒駕 駛者需保持警覺心,以預防事故之發生。
PDFCMD Trial Version
www.zeon.com.tw
圖 3.14 當陶瓷壓電材料偵測到側向來車時的程式執行結果一 當陶瓷壓電材料測得側向車時,即側車於陶瓷壓電材料感測 10m 範圍內,將依據當 時擷取資料所估算之相對速度,建構警示區域,若側車水平坐標位置位於所有警示區位 置外時,則警示等級將成為無色,亦即為安全狀況。計算警示程度: 水平坐標(橫向位置)=6m>相對速度 1.5 反應時間 3 秒=4.5m,故為安全等級。 圖 3.15 當陶瓷壓電材料偵測到側向來車時的程式執行結果二 當偵測側車水平坐標(橫向位置),位於所構建之警示綠色區域範圍內時,將發佈車 內車機警示等級為綠燈,亦即為注意狀況。計算警示程度: 相對速度 1.5 反應時間 3 秒=4.5m > 水平坐標(橫向位置)=4m > 相對速度 1.5 反 應時間 2 秒=3.0m,故為注意等級。
PDFCMD Trial Version
www.zeon.com.tw
圖 3.16 當陶瓷壓電材料偵測到側向來車時的程式執行結果三 當偵測側車水平坐標(橫向位置),位於所構建之警示黃色區域範圍內時,將發佈車 內車機警示等級為黃燈,亦即為警告狀況。計算警示程度: 相對速度 2.5反應時間 2 秒=5m > 水平坐標(橫向位置)=3 m > 相對速度 2.5 反應時間 1 秒=2.5m,故為警告等級。 圖 3.17 當陶瓷壓電材料偵測到側向來車時的程式執行結果三 當偵測側車水平坐標(橫向位置),位於所構建之警示黃色區域範圍內時,將發佈車 內車機警示等級為黃燈,亦即為警告狀況。計算警示程度: 相對速度 1.5 反應時間 1 秒=1.5m > 水平坐標(橫向位置)=1 m,故為危險等級。 以上程式計算,皆以側向車最接近裝載車之垂直坐標(縱向位置),做為側車是否有 過於接近或接近速度過快之指標,並不影響計算警示區域大小,僅影響最大警示範圍的 位置,如(圖 3.16)與(圖 3.17)所示,緃向位置之不同,僅影響最大值位置。 以上各圖所用參數及二階程式如下所示:
PDFCMD Trial Version
www.zeon.com.tw
裝載車車身長:4m 警示區域模擬,像素大小比例與實際大小比例:30pexil::1m 二階程式: 2 0 1(Y Dv) C C X 式中 X:計算警示區域對應之水平坐標 Y:計算警示區域對應之垂直坐標 Dv:側車垂直坐標(縱向位置) 1 C :警示曲線參數,在程中所使用之值為 -3 0 C :警示區域參數,為駕駛者反應時間(1、2、3 秒)裝載車與側車相對速度(Vr)
目前警示模式模擬已從 Borland C++ Builder 平台轉移至 Borland JBuilder 2005 平 台,如(圖 3.18)所示。此模擬平台可視不同駕駛行為及狀況,設定不同之側車行為參數, 以增加模擬可信度,此外,此平台為動態模擬,可在模擬中觀察程式缺失立即反應改善。 圖中橘色方塊代表裝載車;紅色方塊代表臨界範圍;黑方塊色為靠近裝載車之側車;灰 色塊表示警示燈,依不同警示程度亮綠、黃及紅色燈。 圖 3.18 Borland JBuilder 2005 模擬平台 (2) 預估碰撞模式 在建立完整全方動態防撞警示模式,需架構一套動態防撞警示系統做為發布警告之 基礎,在此對於側向動態防撞警示系統模式已有初步構建,硬體量測設備方面係為利用 <子計劃二>陶瓷壓電材料做為感測裝置,量測與周遭物體間之距離,而單位時間內電壓 變化值,即為與物體間之相對速度關係。在已架構好之動態防撞警示系統中,僅利用相 對位置及速度,做為判斷警示程度之決定參數,然而此一決策模式對於現實生活中之駕 駛行為及車流實況,並不足以確保行車安全與否,原因在於駕駛者稍不留意,則禍不旋 踵,亦或警示系統發布時間點過晚,與達前事警告之目的背道而馳。此外,由於周遭車 流狀況瞬息萬變,各車輛行駛之行為盡不相同,對於原先動態警示系統分析構架而言, 雖能測得即時的危險程度,但卻不能藉由感測周遭車與裝載車間的歷史軌跡,來判斷整 體行駛狀況的危險程度。 因此,為了彌補動態防撞系統模式中所缺少之分析元件,以增加模式實用性及提升 其安全性之績效,本系統利用卡曼濾波器之 α-β-γ濾波器,來分析比較其預測周遭側向 物體移動方向及位置之精確度,其系統流程圖如(圖 3.19):
PDFCMD Trial Version
www.zeon.com.tw
壓電材料 側向 Data Fusion 卡曼濾波器 預測 防撞偵測系統 推估預測系統 相對車速、距離 下一時刻車速、距離 相對車速、加速度 圖 3.19 預測模式流程圖 本模式中以 JAVA 平台模擬 α-β-γ濾波器之演算法,如(圖 3.20)所示。模擬結果 可知 R 值大小設定影響增益方程以及濾波值的改善,而未來應擴充程式模擬並考量駕駛 人反應機制,使之符合實際的可能情形。 圖 3.20 卡曼模擬圖 (圖 3.20)中紅色曲線代表量測值;綠色曲線代表預測值;藍色曲線代表濾波值 2. 不當車道偏離偵防模式 本項偵防模式擬採用「模糊、類神經網路」進行推演。經由車載之 CCD 攝影機與 即時影像處理所得的資料,加以自我學習演算,目的在於判定演算結果是否顯示車輛即 將偏離車道,並依需要提出適當的警示。 假設在一般正常的駕駛情況下,駕駛人可以將行進中的車輛中心保持在車道中心線 的位置,如(圖 3.21)所示。至於車輛行進軌跡,在理想狀態下應保持「絕對穩定」,使得 車輛與車道線間距為一固定常數;但是由於車道線形、鋪面狀況、車流現象、天候狀況、 駕駛人習慣、以及其他各種外在因素,一般的車輛行進狀態會呈現「相對穩定」,如(圖 5)與(圖 3.22)。以車道中心線為基準,上下各取 1/2 車身寬度(W/2),假設為車輛行進 軌跡曲線之振幅的臨界值,做為判斷是否偏離車道的參考依據。
PDFCMD Trial Version
www.zeon.com.tw
車道線 車輛暨車道中心線 Y w/2 車輛行進方向 W W:車輛寬度 Y:車輛與車道之側向間距 圖 3.21 車輛與車道位置示意圖 T2 T1 車道偏離 臨界值 臨界值 側 向 間 距 變換車道 相對穩定 時間T 0 Y w/2 w/2 圖 3.22 車輛行進軌跡示意圖之二 在經由即時影像之前端處理之後,可得到車輛與車道線之側向間距及速度,以此作 為主要參數,進行決策邏輯判定之後端處理;利用模糊類神經網路的學習演算,以完成 判斷車輛是否產生車道偏離的決策模式。而在尚未裝車進行系統實作之時,本研究之模 擬將採用「逕向基機率網路」(RBPN,Radial Basis Probability Network),如(圖 3.23)所 示,類神經網路經由歷史資料建構出車道偏離之分類區域,其演算結果將車輛之跟路行 為由淺至深分類為「非偏離車道」、「趨近車道線」、「即將偏離車道」,並在得到「即將 偏離車道」之時,提出適當警示(如圖中藍色星號處)。 圖 3.23 決策模式演算之車道偏離分類區域
PDFCMD Trial Version
www.zeon.com.tw
然而,「車道偏離」與「變換車道」都有可能發生偏離穩定或跨越車道(超越臨界 值)的情形,如(圖 3.22)所示。本研究的決策模式中,以設定方向燈是否啟動作為判定 基準,即使是正常變換車道,駕駛若未打方向燈,即視為危險之車道偏離而予以警示。 不當車道偏離偵防決策模式初步流程圖例,如(圖 3.24)所示。 圖 3.24 不當車道偏離偵防決策模式流程圖 3. 追撞偵防模式 為推算出偵防追撞之正確警告時間,將透過車載之CCD,取得與前導車之相關參數 如,輸入於類神經網路中,利用追撞距離及追撞時間演算法,求得警告程度之門檻值 (WT),此外,由於行駛環境因素影響,以致駕駛者安全條件不相同,因此尚需輸入前方 車輛數(VN)及氣候之環境參數(Cr),輸入至模糊架構函數,以調整獲得適當警告之門檻 值。 當裝載車啟動前方安全防撞自動控制模式系統時,裝載車若以車道線內中之前方車 輛為跟車目標時,安全跟車間距是須要的。從最極端的例子來考量,假設前方車輛突然 的緊急煞車,來計算所裝載車與前方車輛所需的最短車間距,以避免與前方車輛碰撞, 因此須考量一連串的反應及煞車機制,來計算最小跟車間距。在反應及煞車機制中,有 四種狀況須考量,第一,當車機在感知異狀期間車輛所行走的距離;第二,判斷與行動 延遲時間內車輛所行走的距離;第三,車輛從初始減速能力到最大減速能力,直至停止 時所行走的距離;第四,前車以最大減速能力停止時所行走之距離。所組成安全車距之 公式如下所示:(Fenton, 1979) S V V D J D J V D J D V D opt 0 max max max max max max max l max 2 ( ) ( ) ' 0 3 2 0 2 2 2 1 6 2 2 式中 V :為裝載車車速(m sec)
PDFCMD Trial Version
www.zeon.com.tw
:所有機械機制延遲時間,包括車機感測延遲、控制及煞車決策的時間延遲(sec) Dmax:裝載車最大減速能力( sec2) m Jmax:裝載車最大顛簸率(m sec3) Vl:前車車速(m sec) Dmax' :前車最大減速能力(m sec2)
若裝載車在良好的天氣情況下,、 Dmax及 Jmax分別為 0.245(sec)、7.85( sec ) 2 m 及 76.2(m sec3),則上式中的安全車距可簡化如下: (D ) ' J V V D V D max max 0 max l max 2 0 2 2 2 若前方車輛以安裝於裝載車後照鏡位置的攝影機,做為前方安全防撞的主要元件, 以影像處理辨識裝載車前方車輛時(Chang,1993; Chang,1994),此外裝載車也可利用雷射 偵測前方車輛車速及減速狀況,假如前方車有裝載相同設備系統時,則上式的最小跟車 間距可轉化如下: Srel 0 35. V00 0637. (V02Vl2) 然而,假如前方車輛若無裝載,則表示前方車輛行為是無法預知的,在無法預測的 情況下,假如因為跟隨的車,是手控或無裝載設備之車輛時,經由裝載車考量任意跟車 狀況時,而跟車距離較短時,只要有乘客在裝載車內,駕駛者就會有一定的心理壓力。 根據加洲法規規定,緊隨在前方車輛的車間距,應保持於每增加 10 公里的時速時,就 須多加一輛車車長的間距,為了是能使駕駛者有足夠的反應時間面對狀況發生,而車間 距即為0 225. L Vv 0(Ioannou, Chien and Hauser, 1992),其中L 為車身長單位為公尺,V0 0為車
速單位為m sec。國內也以依照此法,因此,若前車無裝載設備時,其裝載車最小跟車 間距應為: Sabs0 225. L Vv 00 0637. (V02 Vl2) 考量國內平均車身長,將上式簡化為: ) ( 0637 . 0 0125 . 1 0 02 l2 abs V V V S 對於追撞距離而言,為避免過度予以警告造成駕駛者分心,因此警告需在不造成駕 駛者負擔情況下,依適當或必要時間點上予以,另外煞車程度也需保持駕駛者及乘客在 可接受之舒適範圍內,因此亦需藉由追撞距離演算定義警告門檻值,持續分析車輛在公 路上的安全狀況,決定是否予以警告,其分析決策流程圖如(圖 3.25) 所示。
PDFCMD Trial Version
www.zeon.com.tw
圖3.25 車輛追撞決策模式流程圖 4. 電腦視覺眼部偵測為基礎之駕駛疲勞警示系統 本研究目的在建立一套可偵測駕駛疲勞的系統,包含以下目標:首先,此套系統為 非侵入式,在完全不妨礙駕駛人行車的狀況下進行偵測;第二,即時的運算以確保及時 的行車安全;第三,此系統能同時在白天與夜晚環境下正常運作。本研究採用 Borland C++ Builder 軟體撰寫,整體系統概念如(圖 3.26)所示。 圖 3.26 整體系統架構包含車上單元與服務中心單元
PDFCMD Trial Version
www.zeon.com.tw
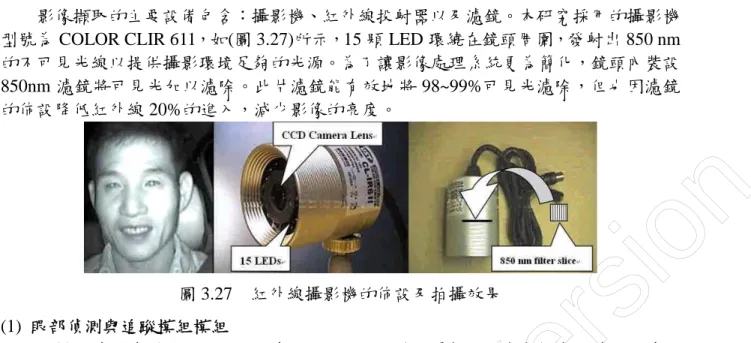
影像擷取的主要設備包含:攝影機、紅外線投射器以及濾鏡。本研究採用的攝影機 型號為 COLOR CLIR 611,如(圖 3.27)所示,15 顆 LED 環繞在鏡頭周圍,發射出 850 nm 的不可見光線以提供攝影環境足夠的光源。為了讓影像處理系統更為簡化,鏡頭內裝設 850nm 濾鏡將可見光加以濾除。此片濾鏡能有效地將 98~99%可見光濾除,但也因濾鏡 的佈設降低紅外線 20%的進入,減少影像的亮度。 圖 3.27 紅外線攝影機的佈設及拍攝效果 (1) 眼部偵測與追蹤模組模組 此模組透過偵測臉部位置、眼睛位置以及眼部追蹤邏輯,逐步分析出正確的眼睛目 標。眼部偵測與追蹤模組的輸出結果可進一步計算駕駛的端疲勞程度。 臉部範圍偵測邏輯 在光源充足的環境下利用橢圓形樣板匹配演算法決定駕駛者臉部的範圍,因為 人 臉具有很重要的幾何特性:長寬比為定值且具有對稱性。影像在經邊緣處理後,逐一與 不同半徑、座標的橢圓形比對,當橢圓型圓周畫素得到最大的匹配值即決定最優化的人 臉目標。
N i i S s N g s 1 | | 1 max arg * 上式中,gi為在圓周畫素 i 的梯度、Nσ為圓周畫素的總個數。在光線不足的狀況下, 適性門檻值將原始影像加以二值化,因為攝影機架設在儀表板上方,駕駛者的臉部及脖 子約佔據整個畫面的八分之一,因此適性門檻的數值由全部畫素中的第八分之一亮度累 積統計值決定。再藉由 Connected Component Labeling 將影像中的所有前景逐一標記, 前景面積最大值即決定最優化的人臉目標,眼部偵測結果顯示於(圖 3.28)、(圖 3.29)中。圖 3.28 利用 Connected Component Labeling 決定人臉位置
PDFCMD Trial Version
圖 3.29 光線充足與不充足下成功的人臉偵測結果 眼睛位置偵測 利用物理運動特性作為眼睛位置偵測的初步分析,當車輛行進時會產生振動同 時駕駛者也會輕微晃動自己的身體,因此這些瞬間位移可由兩張連續影像的相減而獲 得,即可以判斷出影像中所有移動的物體(圖 3.30),尤其眼睛睜閉時的變化最為明顯。 兩張 ti與 tj影像相減後的結果可定義為如下: 0 255 ) , (x y dij otherwise | ) , , ( ) , , ( | f x y t f x y t T if i j 圖 3.30 連續兩張影像相減後留下會動的目標物
在進一步的偵測分析中必須針對臉部區域進行邊緣偵測,Horizontal Sobel Edge Detector 可用以偵測臉部影像中水平方向的強度變化。再透過投影法獲得的數個峰值包 含眉毛、眼睛及嘴巴的區域,並利用五官的幾何關係即可判斷最優化的眼睛目標,偵測 結果如(圖 3.31)所示。 圖 3.31 眼部偵測結果
PDFCMD Trial Version
www.zeon.com.tw
眼睛位置追蹤 透過好的追蹤技術可彌補因不良環境狀下造成的偵測失誤。在此模組的前兩道步 驟:臉部偵測與眼部偵測必須處理整個影像,勢必降低系統的運算速度,因此本研究透 過α-β濾波先預測下一張影像目標物出現位置,再針對可能的位置進行擴大搜索即可迅 速獲得新目標物的位置以有效提升系統運算速度。 另因為人眼的尺寸會隨著不同駕駛者的五官及與攝影機的距離而變化,因此一個更 強健的方法是利用動態搜尋視窗自動決定搜尋範圍的大小,其是由前一張影像的眼睛大 小、平均的眼睛尺寸及眼睛座標而決定的。本研究中,α-β濾波的 α = 0.7 and β = 0.3。 (2) 駕駛疲勞警告模組 眼睛運動參數 眼睛運動的狀況是判斷駕駛者疲勞程度的重要特徵値之一。藉由影像處理方法判定 駕駛者的眼睛開合度,即可決定駕駛者疲勞的程度。在本研究中,採用兩個眼睛參數: PERCLOS 及 AECS,PERCLOS 的定義是在 30 秒鐘內,總閉眼程度超過 80%以上延時 比率;AECS 則定義為 30 秒鐘內平均的閉眼及睜眼速度。在(圖 3.32)中,閉眼延時是指 t2~ t3耗費的時間,AECS 則為 t1~t2及 t3~t4兩段的平均時間。 圖 3.32 PERCLOS 與 AECS 的定義 疲勞程度的判定 前述的眼睛運動參數只能獲得駕駛者個人的生理特徵,但每位駕駛者正常清醒時的 眼睛運動特徵不盡相同,設定固定的門檻值反而會造成誤判,因此本研究利用倒傳遞類 神經網路學習駕駛者在清醒狀況下的眼睛運動模式,只要後續眼睛運動狀態不符合清醒 狀況下的模式,即可判定已有不正常的駕駛行為產生。所以本系統的警覺程度的判定具 有自我學習的能力,透過範本的學習以調整路網的權重值,有 N 位駕駛者就有 N 組倒 傳遞類神經模型。此模型如(圖 3.33)所示,由六條路網所鏈結,神經網路的通式如下所 示:
n i i ix w g x y 0 ) (上式中,x 為 PERCLOS 與 AECS 參數的輸入神經元,y 為警覺程度的輸出神經元,w 為權重,g 為活化函數可將輸入神經元指向特定的輸出神經元。 為找出駕駛者個人的眨眼特性,本系統先假定駕駛者在啟動車輛後的前兩分鐘注意 力非常集中,利用這段影像作為個人的類神經網路學習範本,再逐一調整權重至網路收 斂。在每秒處理三十張影像的速度下,扣除前三十秒 PERCLOS、AECS 的資料尚未蒐 集完畢,共產生 2700 筆學習範本。開始的權重初始值設定為 w13=1.0, w23=-1.0, w14=-1.0, w24=1.0, w35=1.0 以及 w45=1.0,實際上,初始權重並不會影響最後權重的學習效率。在 學習階段收斂完畢即進入執行階段,針對後續傳入的 PERCLOS 及 AECS 進行警覺程度 的判讀,如果倒傳遞類神經模型輸出值為 1 代表駕駛者昏昏欲睡,輸出值為 0 代表注意 力集中。
PDFCMD Trial Version
www.zeon.com.tw
5 4 3 1 2 W24 W23 W13 W45 W35 AECS PERCLOS Vigilance Levels BPNN Model Trainining Phase Phase Execution Phase BPNN Model: adjust weights Conver gence? N BPNN Model
Input(PERCLOS, AECS)
Output (Vigilance Levels) Record Execution Phase Y 圖 3.33 倒傳遞類神經網路的設計與應用 警告門檻值的設定 道路駕駛時有很多因素會影響行車安全,所以疲勞警告門檻值應隨著不同駕駛個人 反應程度而有不同的權重,因此本研究採用模糊隸屬函數作為疲勞門檻值決策判斷的方 法。梯型與三角形隸屬函數所組合成的輸入值分別為:車速 (V)、警覺程度(vigilance
levels, Lv),輸出值為警示程度(warning levels, Lw)。在(圖 3.34)中,車速的隸屬函數由{slow,
medium, and fast}所組合,警覺程度的隸屬函數包含{attention, inattention, and drowsy}, 而警示程度在本研究中被設定成{safety, caution, and danger}三個等級。
因為車速、警覺程度及警示程度各有三個等級,依序產生了九項規則 3 x 3 = 9,這 些規則以模糊化的架構 If (…)then (…)顯示,本研究所採用的九項規則如下列表所示:
Rule1. If (V is slow) and (Lvis attention) then (Lwis safety)
Rule2. If (V is medium) and (Lvis attention) then (Lwis safety)
Rule3. If (V is fast) and (Lvis attention) then (Lwis caution)
Rule4. If (V is slow) and (Lvis inattention) then (Lwis safety)
Rule5. If (V is medium) and (Lvis inattention) then (Lwis caution)
Rule6. If (V is fast) and (Lvis inattention) then (Lwis danger)
Rule7. If (V is slow) and (Lvis drowsy) then (Lwis caution)
Rule8. If (V is medium) and (Lvis drowsy) then (Lwis danger)
Rule9. If (V is fast) and (Lvis drowsy) then (Lwis danger)
透過上述規則與各隸屬函數值域的設定,產生出的 3D 模糊決策面如(圖 3.34)所示。
PDFCMD Trial Version
圖 3.34 各組模糊隸屬函數結構與疲勞警示程度決策面 (3) 實測結果 眼部偵測與追蹤模組的試驗成果 在眼部偵測與追蹤模組中共有四個試驗者,透過預先錄影好的影片輸入至模組程式 中進行測試,採用的影像寬度為 320 畫素,影像座標原點落在影像中的左下角。(圖 3.35) 左邊的曲線圖代表駕駛者兩眼的絕對座標,縱軸為影像寬度,橫軸為時間單位(1/30 秒), 上面曲線為右眼出現位置,下面曲線代表左眼位置。 圖 3.35 眼部偵測與追蹤模組的試驗結果 第一個試驗者於第 140~170 張影像的偵測視窗尺寸變化快速,不易框出正確的 眼 睛位置,原因在於駕駛者眼鏡上的反光會影響偵測結果的準確度,尤其靠近車窗的左眼 受到外在光源影響較大導致結果不盡理想,相對來說,受光源影響程度較小的右眼偵測
PDFCMD Trial Version
www.zeon.com.tw
結果較佳。第二位試驗者的曲線變化幅度很平順,即便在白天的環境下,因為無眼鏡反 光的干擾,偵測結果很佳。第三位受試者為夜間環境,在第 90~105 張影像中,兩條曲 線非常靠近的原因是駕駛者恰巧轉頭,透過兩眼相對位置的變化,能歸納出駕駛者的行 車習慣。第四位試驗者的兩眼位置曲線變動頻繁,代表此駕駛者平時開車會習慣性的注 意周圍環境並保持警覺。表 4 為測試的環境及偵測失敗率結果,有戴眼鏡的狀況下成功 率為 84.83%;無戴眼鏡的狀況下平均成功率為 97.78%。 表 3.1 受試者的試驗環境及測試結果描述 受 試者 環 境 戴 眼鏡 總 張數 右眼失 敗率 左眼失 敗率 平均失 敗率 1 白 天 Yes 300 10.33% 20.00% 15.17% 2 白 天 No 300 4.00% 1.33% 3 夜 晚 No 300 1.00% 0.67% 4 夜 晚 No 300 4.33% 2.00% 2.22% 駕駛疲勞警示模組的試驗成果 警示程度的產生是由兩組輸入值決定:警覺程度與車速,假設其一輸入值為定值而 另一輸入值為變數的狀況下所產生相對應的警示程度。第一組測試駕駛者的警覺程度在 Lv=0.8 時,駕駛昏昏欲睡,反應能力降低,在車速由 20kph 提升至 70kph,警示程度也
從 Safety 等級進入 Very Danger 等級。第二組假設車輛速度維持在 60kph,當警覺程度 為 0 代表駕駛者非常清醒,所以屬於 Safety 等級,但在警覺程度降低至 0.5 時代表駕駛 者不專心,警示程度也迅速上升至 Danger 等級。故車速高的狀況下,警示程度的上升 速度較快,而在車速低的情況下,警示程度的上升速度也相對較遲緩。 圖 3.36 駕駛疲勞警示模組的試驗結果
PDFCMD Trial Version
www.zeon.com.tw
@ 子計畫二:壓電陶瓷元件應用於側方來車偵測研究 以無所不在的感測技術,提供汽車駕駛者無遠弗屆的安全與舒適是智慧型運輸系統 未來發展的重要願景圖像。在勾勒此願景時,由於如何正確的偵測短距離來車或物體所 需的感測技術對人身安全提供相當重要的防護,因此扮演舉足輕重的角色。短距離感測 所需的偵測標準隨應用的需求不同而有相當大的差異,(圖 3.43)展示一些具代表性的短 距離感測應用,包括目前已經相當普及的倒車雷達與技術發展仍待進一步突破的防測撞 感測技術。(表 3.2)將(圖 3.43)中部分情境應用的感測需求做進一步整理,其中偵測距離 因其應用不同需涵蓋 0-20 m 的距離,所需的解析度包括 5 cm-20 cm 不等的範圍,偵測 更新率在防測撞應用需達到 20 ms 的標準等。本研究以研發短距離防測撞技術為應用主 軸,以壓電陶瓷為研究主題,開發透過此材料特性所構裝而成的感應元件,進而建立此 材料與元件應用於行車駕駛安全中偵測短距離側方來車所需的感測技術。透過本研究, 我們將掌握 PZT 與非鉛成分壓電陶瓷的核心製程與元件設計技術,擴展此智慧材料與系 統於智慧型運輸系統中的應用。 圖 3.43 一些具代表性的短距離感測應用 表 3.2 部分短距離感測應用的感測需求
Blind Spot Parking Aid Stop & Go Simple Pre-Crash Max. Detection Range(m) 4-8 2-5 20 7-10 Required Range Resolution(m) 0.1-0.2 0.05-0.2 0.2-0.5 0.1-0.2 Max. Relative Velocity(m/s) 15-25 3-5 8-12 40-60
PDFCMD Trial Version
www.zeon.com.tw
Acquisition
Time(ms) 200 500 300 50
Update Rate(ms) 50 50 40 20
Minimum Object
Size Bicycle 3”PVC Pole Bicycle Metal Post
@ 第一年研究已完成工作: 本計畫以壓電陶瓷為研究主題,開發透過此材料特性所構裝而成的感應元件與相關 電路,進而建立此材料與元件應用於行車駕駛安全中偵測短距離側方來車所需的感測技 術。壓電陶瓷具有連接機械能與電能的功能,其感應原理是透過電能激發機械性的諧 振,由此產生超音波來進行感測。以壓電陶瓷製作的超音波感應元件相對於一般電磁波 感應元件(如毫米雷達、紅外線感應器等)的優勢為小尺寸、高可靠性與低電能或機械 能即可產生高品質的超音波。相對於其他材料,壓電陶瓷的優點為易於製造、可大量生 產、成本低、不受尺寸與形狀的限制、可在任意方向進行極化、可通過調整材料組成大 幅改進壓電功能、耐熱耐濕防蝕、化學穩定性佳等。 本計畫選擇以壓電陶瓷超音波感應元件為研發主題,除了因為上述的優點外,亦是 有鑑於歐、美、日等國家的研發機構已掌握大部分應用於智慧型運輸系統之電磁波感應 元件的核心技術與專利(如日本 Mitsubishi Electric Corporation 所掌握的毫米雷達技
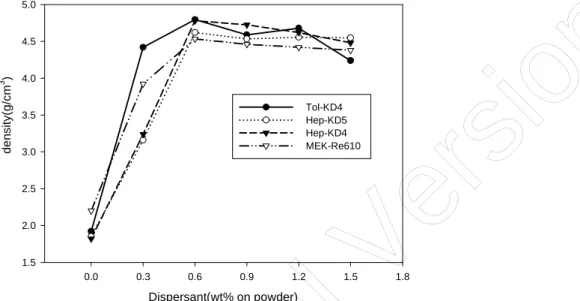
術)。台灣在起步較晚的情形下,較難在電磁波感應元件的核心技術上與這些國家競爭。 相對而言,壓電陶瓷感應元件目前雖然已被成功的應用於醫療超音波斷層診斷、深海魚 群探測、噴墨印表機噴頭等,但在汽車駕駛安全的應用上則仍有待突破與整合。因此如 果我們可以掌握相關的核心技術,如最佳材料選擇、製程、元件設計與相關微機電技術、 電子電路設計、車機整合等,配合台灣在電子與製造產業所居的優勢,本研究成功的研 發,應可促進台灣在此方面技術的創新與落實,厚植智慧型運輸系統感應技術的發展。 壓電超音波感應元件的效率良劣主要取決於材料的壓電性質與元件結構體的設 計。在壓電材料選擇方面,本研究以應用最廣的鋯酸鉛-鈦酸鉛合成物或俗稱 PZT 的壓 電材料與以目前廣受產學界重視的非鉛成分壓電材料為基礎,瞭解晶相與微結構對壓電 材料性質的影響。再配合精密陶瓷製程與計算模擬所提供的預測能力,協助我們由近千 多種材料與添加物中,尋找出具有最佳壓電性質的非鉛成分壓電陶瓷。在元件設計方 面,我們考慮元件工作頻率對量測距離與準確度的影響與此感應元件指向性與保護層在 智慧車上的最佳設計。這方面以有限元素配合微觀與巨觀的材料性質,輔助元件設計與 功能分析。 本研究為三年期的研究,我們目前已於本年度實作出應用最廣的 PZT 超音波元件, 並初步測試發展與整合設計所需的計算方法與軟體平台。完成的工作項目包括濺鍍靶材 製作、薄殼狀 PZT 元件製作、自製壓電材料微結構性質分析、小面積濺鍍法製備 PZT 薄膜、無鉛壓電材料系統的初步開發、自製壓電元件材料係數量測與壓電元件的初步計 算模擬。以下針對研究方法與成果做一簡述與討論。 1. 濺鍍靶材製作 靶材製作方法採用陶瓷膠粒製程,因 PZT 中所含的鉛在水溶液中會以離子態溶出, 所以分散基使用有機溶劑。有機溶劑選擇方向除了使用一般常用之二丁酮外,另選擇非 極性之正庚烷及甲苯作為分散基。而所加入分散劑則先與上述三種分散基進行溶解度測 試後,篩選出 23 種配方再進行沉降實驗。透過離心(3000g)或靜置試驗(一星期), 進一步選出 KD4-甲苯,RE-610-二丁酮,KD4-正庚烷,KD5-正庚烷這四種較佳的組合。
PDFCMD Trial Version
www.zeon.com.tw
接著進行生胚密度與燒結密度分析,取得最佳之配方及燒結溫度。(圖 3.44)所示為不同 分散劑所得到之離心沉降生胚密度,其中以 KD4-甲苯系列具有較佳之生胚密度。將此 系統進行燒結溫度測試。(圖 3.45)為 KD4-甲苯系列之燒結密度曲線,其中以 0.9-KD4-甲苯有較佳之密度。以此配方作為壓濾法製作靶材以及塊狀樣品的配方,目前已可以獲 得高密度無裂痕之靶材。 Dispersant(wt% on powder) 0.0 0.3 0.6 0.9 1.2 1.5 1.8 d e n s it y (g /c m 3 ) 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 Tol-KD4 Hep-KD5 Hep-KD4 MEK-Re610
圖 3.44 Green density plotted against amount of added dispersant in : KD4-toluene system, : KD5 in Heptane system, ▼: KD4 in heptane, ▽: Re610 in 2-butanone (methyl ethyl ketone) solution.
Sintering temp.(oC) 950 1000 1050 1100 1150 1200 1250 D e n s it y (g /c m 3 ) 7.0 7.2 7.4 7.6 7.8 8.0 Tol-0.6KD4 Tol-0.9KD4 Tol-1.2KD4
圖 3.45 Sintered density of PZT material sintered at different temperature. The starting slurry is prepared by: 0.6wt%,:0.9wt%, ▼: 1.2wt% KD4 based on the mass of PZT powder in toluene. 2. 薄殼狀 PZT 元件製作 薄殼狀 PZT 元件利用低壓射出成形而得,利用塑料混練時扭矩的變化,黏度大小及 重量損失分析,得到較佳之 PZT 混練成射出胚料後,以 Peltsman 低壓射出機製成薄殼 狀 PZT 生胚,再利用 Friedman 及 Ozawa 之動力方程式分析推導出塑料高分子的分解動
PDFCMD Trial Version
www.zeon.com.tw
力能和反應級數得到脫脂曲線後,進一步以熱重分析儀得到脫脂最佳條件,完成脫脂進 行燒結得到薄殼狀 PZT 元件見(圖 3.46)及(圖 3.47)。
圖 3.46 The green body of thin-shell-type PZT cup.
圖 3.47 The thin-shell type PZT cup after sintering.
3. 自製壓電材料微結構性質分析 微結構分析主要針對晶粒大小進行分析,較大之晶粒雖然具有較多之電域壁,容易 經由極化後的得到較高機電耦合因素,但 PZT 機械品質因素則因浪費較多的動能在電域 壁之摩擦上而不易提升。目前 PZT 微結構分析主要是利用 SEM 觀測不同燒結溫度下 PZT 晶粒大小之變化,針對燒結密度較高之 KD4-甲苯系列之 PZT 試片,完成如(圖 3.48)的 金相分析,由圖中可以觀測出 PZT 晶粒隨著燒結溫度而上升,密度較低時孔洞數量也較 多,後續之微結構觀察將會再針對塊材內部以及電極介面之缺陷存在與否進行觀測。
PDFCMD Trial Version
www.zeon.com.tw
(a) (b) sintering temperature(oC) 950 1000 1050 1100 1150 1200 1250 g ra in s iz e ( m ) 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6 2.8 (c) (d)
圖 3.48 SEM micrographs of PZT sintered at (a) 1000℃, (b) 1100℃, (c) 1200℃ for 1h and (d) average grain size.
4. 小面積濺鍍法製備 PZT 薄膜 PZT 薄膜方法為將離子打薄機之試片載台改裝後,令靶材及基板都可以在試片載台 上,再利用離子鎗發射高能氬離子將靶材中原子打出後,令其隨機沉積在兩種基板上, 一是氧化鋁,一是矽晶片。 濺鍍薄膜之厚度及表面型態利用 SEM 觀察,結晶相以及優選位向使用 XRD 觀測。 目前使用之製程所使用之靶材為 PZT 單一靶材,其組成為鋯鈦比 52/48 之鈣鈦礦相 PZT 靶材。(圖 3.49)是一系列 X 光繞射鑑定薄膜晶相之結果,以離子濺鍍(IBSD)方式將 PZT/PNZT(PZT 加入少量的 Nb)靶材濺鍍到含有白金及鈦薄膜之矽晶片(Pt/Ti/Si),隨 後在 600 及 700 o C 熱處理,結果顯示除了位在 39.94o 的繞射峰是屬於 Pt (111)晶面, 其 他 均 屬 於 鈣 鈦 礦 相 (perovskite) 及 非 常 少 量 的 焦 綠 石 相 (pyrochlore, 成 份 Pb2(Zr, Ti)2O7-x)。由前述分析結果可知,不論是 PZT 或 PNZT 有必要在 700oC 熱處理,才能的 到純淨的鈣鈦礦晶相。
PDFCMD Trial Version
www.zeon.com.tw
圖 3.49 經由不同熱處理之 PZT 及 PZT(不含及含 5% Nb2O3) 之塊材或鍍膜之 X 光繞射圖譜。
5. 無鉛壓電材料系統的初步開發
由文獻資料探討,我們認為Ba(TiyZr1-y)O3將會是個不錯的非鉛材料系統,希望藉由
Barium Titanate(BaTiO3)和Zirconia(ZrO2)的混合製程技術,以獲得壓電常數d33高的
非鉛壓電陶瓷塊材。本研究分別以一般乾壓及膠粒製程的方式製備非鉛材料系統,流程 如(圖3.50)所示,在BaTiO3中添加不同比例的ZrO2(0、5、8、13 wt%),乾壓部分選用直 徑為兩公分的圓形模具,施加壓力為90 MPa。膠粒製程的溶劑為去離子水,選用的分散 劑為PMAAE。試片經拋光、1140℃下thermal etching後做SEM觀察。
PDFCMD Trial Version
www.zeon.com.tw
圖3.50 乾壓與膠粒製程流程示意圖。
磁滯曲線分析(Hysteresis D-E loop)
無論是乾壓或膠粒製程,磁滯曲線的圖型都隨著ZrO2含量的增加而縮小,殘留
極化值(Pr)也如文獻所示隨ZrO2量的增加而減小。(表3.3)為利用量測C-V curve所得
到的室溫介電係數(dielectric constant, K)與介電損失(tanδ)。
SEM微結構觀察 此次兩組實驗在沒有binder的添加之下,密度與緻密性表現不佳,孔洞的情形 嚴重,尤其是乾壓製程(圖3.51(b)、(c))。在乾壓方面,pure BaTiO3發現有異常成長 的現象(圖3.52),5%及8%的孔洞過多,而13%則是出現針葉狀的第二相。在膠粒製 程方面(圖3.53),孔洞情形較為輕微;pure BaTiO3的晶粒相當粗大,約50μm左右, 5%已經有雪花狀第二相出現,8%的第二相變小分布更均勻,13%的第二相粗大且 孔洞密佈。值得一提的是,在顯微結構呈現孔洞大量分佈的情形時(乾壓5%及8%、 膠粒製程13%),其磁滯曲線表現有類似之處,當電場加至 3 MV/m時,極化值(D) 呈約略上升,明顯的有leakage情況,故孔洞會造成漏電現象。 由本次實驗知道緻密性對電性有著深鉅的影響,故在製程方面,之後將會尋找 適當的binder減少孔洞的發生。在電性量測方面,我們目前已添購 displacement gauges來測量壓電常數d33,屆時會有更完整的數據資料。在顯微結構方面,第二相 晶體結構的定性分析是下一步要做的,並會準備TEM試片來做進一步鑑定。在壓電 性質方面,系統中將加入第四款元素如Ca、Nb、或Sr以調整其介電性質。 ◆ Dry pressing ◆ Colloid BaTiO3 ZrO2 Alcohol Ball milling 24Hrs Drying
Oven drying 100 mesh
Die pressing Sinter 1340℃ 1Hr BaTiO3 ZrO2 Water PMAAE Ball milling 24Hrs Pressing Sinter 1340℃ 1Hr Air drying Rotary evaporator
PDFCMD Trial Version
www.zeon.com.tw
表 3.3 Ba(TiyZr1-y)O3室溫介電係數(dielectric constant, K)與介電損失(tanδ) Dielectric constant K (25℃) Dielectricloss(tanδ)
Pure BT 4500 0.52 5% 1500 0.33 8% 1300 0.23 乾壓 13% / 0.20 Pure BT 4000 0.52 5% 1700 0.4 8% 1600 0.14 膠粒製程 13% ~1000 0.12
圖 3.51 乾壓製程 Ba(TiyZr1-y)O3ceramics 的磁滯曲線
圖 3.52 膠粒製程 Ba(TiyZr1-y)O3ceramics 的磁滯曲線 -25 -20 -15 -10 -5 0 5 10 15 20 25 -4 -3 -2 -1 0 1 2 3 4 E (MV/m) D (μC/㎝2) Pure 5% 8% 13%
PDFCMD Trial Version
www.zeon.com.tw
0.1mm
(a) (b)
(c) (d)
圖 3.53 乾壓 SEM: (a) pure、(b) 5%、(c) 8%、(d) 13%
圖 3.54 乾壓 pure BaTiO3異常晶粒
PDFCMD Trial Version
(a) (b)
(c) (d)
圖 3.55 膠粒製程 SEM: (a) pure、(b) 5%、(c) 8%、(d) 13%
6. 自製壓電元件材料係數量測
在利用有限元素計算模擬之前,必須先知道壓電材料的各項係數,亦即壓電材料組 成 律 中 的 各 項 係 數 , 其 中 包 括 彈 性 係 數 ( elastic constants )、 壓 電 應 力 電 荷 常 數 (piezoelectric stress constant)與介電常數(dielectric constant)等係數,方能透過商用 套裝軟體(如ABAQUS等)進行分析。就本計畫所使用的PZT材料而言,由於PZT材料 在晶體的結構上為6mm點群,利用晶體結構的對稱性可將材料常數簡化成10個獨立變 數,可以下列矩陣形式表達: 3 2 1 6 5 4 3 2 1 33 33 31 31 11 15 11 15 66 15 55 15 55 33 33 13 13 31 13 11 12 31 13 12 11 3 2 1 6 5 4 3 2 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 E E E T T T T T T d d d d d s d s d s d s s s d s s s d s s s D D D S S S S S S T T T E E E E E E E E E E E E (1)
上式中S為應變、D為電位移、T為應力、E為電場。spq為柔度係數(compliance constant)、
上標E代表固定電場;dij為壓電應變電荷常數(piezoelectric strain constant)、ij為介電
常數(dielectric constant),上標T代表固定應力。對於此10個材料係數,傳統上是利用IEEE Standard中所制定的方法,針對幾種特殊幾何形狀的壓電元件利用實驗方式進行量測,
PDFCMD Trial Version
透過元件的反應反算材料係數。然而此種方法有其侷限之處:(1)實驗本身有其困難之 處。舉例而言,欲量測壓電材料的介電係數(dielectric)時,必須將電流頻率設定在小 於最低共振頻率下量測平板的介電(permittivity),一般實驗儀器並不容易做到。(2)IEEE Standard中只規範材料係數為實數(real)的量測方式,而非複數型態的量測,此種量測 方式忽略了機電耦合過程中的能量損失。 為克服上述缺陷,本計畫利用阻抗分析儀(HP4294A)以及文獻上的迭代方法,利 用四種特定的壓電元件幾何形式來求得PZT材料的10個獨立變數。以下為四種元件幾何 形式與量測物理量的說明: 一、極化及振盪皆在縱方向的圓柱體:此種元件的幾何形狀如(圖3.56(a))所示, 此種元件的阻抗(impedance)可寫成如下形式:
2 2 33 33 33 2 2 33 33 33 33 1 tan 2 2 D T D D D g g L Z i i L f s f A s A f s s (2) 上式中 L 為圓柱體元件的長度,A 為圓柱截面積,為元件密度,f 為頻率。此外還包 括了 33D s 、g 與33 三個材料參數,值得注意的是此式只適用於圓柱幾何形狀滿足 L/ l >1033T 之條件下,其中 l 為截面直徑。 二、極化在橫方向且厚度振盪的薄板:元件的幾何形狀如(圖3.56(b))所示,元件 的阻抗(impedance)可寫成如下形式: 2 15 2 2 11 55 55 55 1 tan 2 2 S D D D h t Z i i f t f A c Af c c (3) 上式中t為元件厚度,w為元件寬度。此外並包括了 55D c 、h 與15 11 S 三個材料參數。值 得注意的是,此式只適用於元件形式在L/t >10及w/t >10之條件下。 三、極化及振盪方向皆在厚度方向的薄圓板:元件的幾何形狀如(圖3.56(c))所示, 元件的阻抗(impedance)可寫成如下形式: D D D S c t f c c Af h i A f t i Z 33 33 33 2 2 2 33 33 tan 2 1 2 (4) 上式中t為元件厚度,a為斷面半徑。此外並包括 33D c 、h 與33 三個材料參數。值得33S 注意的是,此式只適用於元件形式在2a/t > 10之條件下。 四、極化在厚度方向,振盪在徑度方向的薄圓板:元件的幾何形狀如(圖3.56(c)) 所示,元件的導納(admittance)可寫成如下形式: P P P T c a f c d t a f i Y 1 1 2 2 1 2 2 11 1 11 2 31 33 2 2 (5)PDFCMD Trial Version
www.zeon.com.tw
上式中包括 11 P c 、d 與31 33 T 三個參數組成。值得注意的是,此式只適用於元件形式在 2a/t>16之條件下,因此若滿足此條件,可以與第三種壓電元件共同使用。方程式(5)中的 P 、 11 P c 與之定義如下:1 EE P s s 11 12 ;
2 12 2 11 11 11 E E E P s s s c ; ) ( ) ( ) ( 1 0 1 z J z zJ z (6) 上式中 J0與 J1分別代表零階與一階之貝索方程式(Bessel function)。 (a) (b) (c) 圖 3.56 壓電材料係數量測之元件幾何示意圖 理論上透過阻抗分析儀 HP4294A,針對上述四種壓電元件量測不同頻率下的阻抗 值,即可算出我們所欲知道的材料係數。以第一個元件為例,方程式(2)只包含三個未知 的材料係數,故只需要量測三組頻率-阻抗值即可求解。然而由於式(2)乃一高度非線性 方程式,並不容易直接求解。在此我們利用迭代方式計算材料係數。其步驟簡述如下: 1. 首先利用組抗分析儀求得壓電元件之共振頻率 fr與反共振頻率 fa。 2. 在反共振頻率附近對應最大與最小電抗(reactance,即阻抗的虛數部分)之頻率 訂為初始之 f1及 f2,其與共振頻率 fa之關係為 2,1 a a f f f (7) 3. 利用半反共振帶寬,計算相對應之 33 D s 初始猜測值為 33 2 2 1 1 ( ) 4 D a a a f s i L f f (8) 4. 利用阻抗分析儀量測對應 f1及 f2頻率之阻抗值,並將 33 D s 代入方程式(2),此時 方程式為g 與33 的線性方程式,透過求解兩線性方程式即可得到33T g 與33 。33T 5. 利用反共振頻率 fa 所對應之阻抗值,並將前步驟的g 與33 33 T 代回方程式(2), 求解此一超越函數,得到更新後的 33D s 6. 判斷s33D是否收斂,若收斂則進行下一步驟;若尚未收斂則將更新後的 33D s 重新代 回到步驟 4。 7. 計算壓電耦合係數 k33。 1 33 33 2 0 33 33 (1 ) D T s k g (9) 8. 重新計算最大與最小電抗頻率 f1及 f2。 1,2 33 1 a f f k (10) 9. 判斷電抗頻率 f1及 f2是否收斂,若收斂則結束迭代過程;若尚未收斂則用上述 的電抗頻率重回步驟 2。PDFCMD Trial Version
www.zeon.com.tw
利用類似的方法可以求出其他三個元件的參數,即可得到所有必要的材 料係 數,再以壓電基本力學的轉換公式,可求得 PZT 材料所需的 10 個材料係數。 7. 壓電元件計算模擬與初步成果 傳統上對於壓電元件的設計是透過試誤法來研發產品,然而此法不但耗時而且昂 貴。本計畫利用數值模擬的方法來分析與設計壓電元件,可事先預測壓電元件之特性, 瞭解壓電元件超音波波傳與輻射情形,甚至進一步對其進行最佳化設計,或作為發展新 材質的依據。 本計畫目前已利用商用有限元素分析軟體(ABAQUS及ANSYS)完成壓電元件自 然振動(free vibration)特性所需的計算模擬。透過有限元素分析,可針對各種不同幾 何形狀與邊界條件之壓電元件進行振動特性計算與模擬。若欲利用有限元素法進行壓電 元件之自然振動特性分析,可假設機械邊界條件(mechanical boundary condition)為無 應力束縛狀態(traction free);同時假設元件某一表面電位為零,而另一表面電位不加 以束制。此時壓電元件可視為開放式迴路(open-circuited),若利用有限元素特徵值分 析(eigenvalue analysis)可得到壓電元件之反共振頻率(anti-resonance frequency)。另 一 方 面 , 若 假 設 壓 電 元 件 表 面 電 位 均 為 零 , 此 時 壓 電 元 件 可 視 為 封 閉 式 迴 路 (close-circuited),若利用有限元素特徵值分析(eigenvalue analysis)可得到壓電元件 之共振頻率(resonance frequency),另一方面,使用ANSYS的頻率域分析(harmonic analysis),可得到電流對頻率之曲線,經過轉換,即得阻抗頻率響應圖。 以(圖3.57)所示之壓電換能器(transducer)為例,換能器主要是由我們自行製作的 PZT材料, PZT4(6mm晶體結構)之各項材料係數如(表3.4)所列。在此利用20節點六 面體元素進行模擬,所得之壓電元件之反共振模態(mode shape)如(圖3.58)所示,及阻 抗頻率響應圖,如(圖3.59)所示,而對應之反共振頻率與實驗所得之結果列於(表3.5), 由此表可知:利用有限元素分析所得之共振與反共振頻率與實驗結果皆在3%以內。 除上述之壓電元件自然振頻分析外,利用有限元素商業軟體ABAQUS亦可進行壓電 元件之動力分析,實際模擬壓電元件受電壓驅動後之振動歷時行為,用以反推壓電陶瓷 元件需要多少電壓方能產生超音波。這些資料可用以提供設計壓電感應器形狀與尺寸之 用,此部分相關的數值模擬目前正在積極進行中。 Length= 8.100E-03 m Diameter= 8.500E-04 m Thickness= 5.100E-04 m Diameter= 8.400E-03 m 圖3.57 壓電換能器之幾何形狀(左為圓柱體,右為圓盤)
PDFCMD Trial Version
www.zeon.com.tw
圖3.58 壓電換能器之自然振動模態(左為圓柱體,右為圓盤) 圖3.59 阻抗(impedance)對頻率之響應(左為圓柱體,右為圓盤) 表3.4壓電換能器之材料係數 Material coefficients Elasticity matrix 371 . 35 0 0 0 0 0 0 1938 . 26 0 0 0 0 0 0 1938 . 26 0 0 0 0 0 0 629 . 73 344 . 0 344 . 0 0 0 0 344 . 0 8 . 91 118 . 21 0 0 0 344 . 0 118 . 21 8 . 91 GPa Piezoelectric strain constants
10
12 0 0 0 0 0 7 . 261 0 7 . 261 0 345 . 95 0 0 434 . 91 0 0 434 . 91 0 0 Volt/m Dielectric matrix10
9 29.536 0 0 0 7.6081 0 0 0 7.6081 Farad/mPDFCMD Trial Version
www.zeon.com.tw
表3.5 壓電換能器的共振與反共振頻率
HP4294 量出 FEM 模擬 頻率誤差
BAR fr 1.89111E+05 1.89283E+05 -0.09095% BAR fa 1.90864E+05 1.90911E+05 -0.02462% RADIUS fr 2.59512E+05 2.58820E+05 0.26665% RADIUS fa 2.92053E+05 2.83473E+05 2.93782%
本研究為三年期的研究,在第一年我們已實作出應用最廣的 PZT 超音波元件雛形, 並初步測試發展與整合設計所需的計算方法與軟體平台。完成的工作項目包括濺鍍靶材 製作、薄殼狀 PZT 元件製作、自製壓電材料微結構性質分析、小面積濺鍍法製備 PZT 薄膜、無鉛壓電材料系統的初步開發、自製壓電元件材料係數量測與壓電元件的初步計 算模擬。
PDFCMD Trial Version
www.zeon.com.tw
@ 子計畫三:慣質之研究及汽車懸吊系統之控制應用 如眾所皆知,機械及電子網路系統之間存在著兩種對應關係,即”力-電壓”及”力-電流”的對應。近代越來越多人使用”力-電流的對應關係,因為力和電流同樣被視為網路 元件中的穿越變數 (through variable) ,即在元件兩端的作用力 (電流) 是一樣的。” 力-電流”的對應關係如(表 3.6)所示。 表 3.6 傳統機械/電子網路對應(“力-電流”對應) 然而由(表 3.6)我們可以發現在這看似完美的對應關係中,存在一個瑕疵,即機械系 統中的質量 (mass) 並非完整的兩端點元件,必須有一端接地。然而對應的電子網路系 統 (電容) 卻是一個完整的兩端點元件。因為這一個不完美的對稱關係,限制了被動式 機械系統所能達到的性能。 慣質的發明,即是針對這個不完美的對應關係所提出的一項解決方式。慣質和彈 簧、阻尼一樣,是一個兩端點元件。藉由此元件,可彌補原本機械/電子系統之間的不完 美對應關係。慣質之運動方程式表示如下: 2 2 d x dt F b a b 其中 F 為慣質兩端受力,b 為慣質係數 (Inertance) ,a 為兩端點間的相對加速度, x 為兩端點的相對位移。由於慣質是一個兩端點元件,所以取代原來的質量 m 而形成一項 新的對應,如(表 3.7)所示。 表 3.7 新的機械/電子網路對應關係(“力-電流”對應) @ 第一年研究已完成工作: 1. 汽車懸吊系統 汽車懸吊系統的設計已行之有年。一般來說,一個好的懸吊設計,應該在有限的避
PDFCMD Trial Version
www.zeon.com.tw
震器運動空間內,達到以下的性能要求:(1)提供乘客舒適性;(2)提升車輛操作性能。 汽車在行駛中,懸吊控制所要處理的外界干擾主要有兩個,分別為路面顛簸及加諸車身 之作用力。略而言之,傳統的懸吊系統設計所要達到的目標,一方面是採用“軟式”懸吊 來隔絕路面的顛簸,另一方面則需採用“硬式”懸吊來隔絕車身作用力的干擾;因而最終 的懸吊設計,必須是在這兩個目標間採取的折衷設計。 被動式懸吊控制:傳統被動式懸吊系統採用彈簧、阻尼等被動式元件;從能量的觀 點來看,這些元件至可以儲存及消耗能量。雖然彈簧、阻尼可以有無限多種的組合,但 絕大部分被動式懸 吊 系統可以視作一組 平 行的彈簧 、 阻尼搭 配 (通常稱之為 一個 “柱”(strut)),所以傳統懸吊系統可以視作在每個車輪與車體之間各有一個柱支撐。傳統 懸吊系統還搭配一些額外的元件及幾何設計,來改善局部的性能。前者常見的例子是抗 轉彈簧 (anti-roll bar)的使用以增加轉動的剛度,後者最常見的例子則為支撐桿 (trailing arms)的設計以改善車輛加減速時的後座及前蹲現象 (anti-squat and anti-dive)。
主動式懸吊控制:一般依照其控制架構,可以再區分為半主動以及全主動式控制。 前者是搭配被動式元件,通常是利用彈簧支撐車身重量,而使用主動式驅動器來改善車 輛性能從;後者則是完全使用主動式驅動器來支撐車身重量及改善車輛性能。相較於被 動式元件只能儲存及消耗能量,主動式元件可以提供能量,因而主動式懸吊控制即是以 額外的能量輸入來改善車輛性能;尤其是全主動式懸吊控制因為使用驅動器來支撐車身 重量,因此能量消耗極大。因為能量的限制,使得目前只有極高價的車輛採用主動式控 制。 在本計畫中,我們將慣質的概念引入汽車懸吊系統。利用慣質與傳統懸吊元件 (彈 簧、阻尼) 作各種方式的結合,從性能最佳化的比較,討論慣質所帶來的性能增益。本 計畫以五種不同的被動式懸吊系統來分析,包含傳統懸吊系統以及四種搭配慣質的新懸 吊系統,其組合如(表 3.8)所示。 表 3.8 各種懸吊系統示意圖 S1 (傳統) S2 S3 S4 S5 我們以 4 種常用的性能參數來做為分析的指標。分別是: a、乘客舒適度: 1 2 2 r s z z J V sT b、輪胎抓地力: 1 3 2 s zr k zt(u zr) 2 J V T c、懸吊承重能力: 5 s s F z J T
PDFCMD Trial Version
www.zeon.com.tw
d、Damping ratio: ζ 其中 V 是車子的行進速度,κ是路面粗糙參數。 2. 四分之一車性能最佳化分析 我們以五種不同的懸吊系統,將其套用在四分之一車上,分析其 J1、J3、J5、ζ。一 個四分之一車模型如(圖 3.60)所示。Fs、zr為輸入訊號,各代表車體對懸吊系統的施力、 路面垂直位移;zs、zu 為輸出訊號,各代表車體及輪胎的垂直位移。以下的分析,將車 子行進速度 V 設為 25 m/s,路面粗糙參數 κ為 5e-7 m3 cycle-1,ms=250 kg,mu=35 kg,kt=150 kN/m。其中 Q 為懸吊系統。 圖 3.60 四分之一車模型 為了文章簡潔易讀,以(表 3.9)符號代表之後會常出現的文字。 表 3.9 各種符號定義 符號 意義 Kst 整個懸吊系統 Q(s)的彈性係數 (不包含 kt) J1opt 最佳化 J1,同理 J3opt表最佳化 J3,J5opt表最佳化 J5 k Q(s)中彈簧的彈性係數,Q(s)中 可能不只一條彈簧,以 k1、k2表 示 kopt Q(s)中最佳化的 k,若 Q(s)中有 k1,則 k1opt表最佳化的 k1 c Q(s)中阻尼係數 copt 最佳化阻尼係數 b Q(s)中慣質係數 bopt 最佳化慣質係數 ζ Q(s)中的 damping ratio ζopt 最佳化 damping ratio
ms mu Q zs zu Fs zr ms mu Q zs zu Fs zr
PDFCMD Trial Version
www.zeon.com.tw
接下來我們針對各個性能指標作最佳化。我們作最佳化的方式,是在各個靜態剛性 (static stiffness, Kst) 保持一定的狀況之下,藉由調整慣質係數 b 及阻尼係數 c 來達到各 個性能的最佳化;所以在各項分析當中,我們會分別顯示其最佳性能參數 Jiopt,性能增 進百分比,最佳阻尼係數 copt,及最佳慣質係數 bopt。 J1的分析結果如(圖 3.61)所示,我們發現加入慣質後,S2~S5 均能有效提升其性能, 特別是當彈簧越硬時 (彈性係數越大) ,提升越多。其中 S2 所需的 bopt與 copt最小,但 性能提升較少;而 S5 的性能提升最多。 圖 3.61 四分之一車 J1最佳化 J3的分析結果如(圖 3.62)所示,其表現與 J1類似。性能提升以 S5 表現最佳;而 S2 雖然性能提升較少,但所需的 bopt與 copt也較小。另外,當彈簧的彈性係數 (Kst) 小於 75 kN/m 時,bopt=0,即此時 S2 等同於 S1。 圖 3.62 四分之一車 J3最佳化 J5的分析結果如(圖 3.63)所示,由圖可知 S3、S4、S5 的最佳表現一樣。而 S2 的性 能最好,且其所需的 copt、bopt最小。當彈簧的彈性係數 (Kst) 小於 75 kN/m 時,發現各 種懸吊系統的 J5都相等,表示不需慣質即可達到最佳效能,此時 copt值會圍成一個區域, 表示在此區域中的 copt值都可使 J5達到最佳化。