國
立
交
通
大
學
運 輸 科 技 與 管 理 學 系 碩 士 班
碩 士 論 文
雷達微波偵測器交通參數校估演算法
The Calibration of Traffic Parameters for the
Rader Detector
研 究 生:劉至剛
指導教授:卓訓榮
雷達微波偵測器交通參數校估演算法
The Calibration of Traffic Parameters for the Rader
Detector
研 究 生:劉至剛
Student:Zhi-Gang Liu
指導教授:卓訓榮
Advisor:Hsun-Jung Cho
國 立 交 通 大 學
運 輸 科 技 與 管 理 學 系
碩 士 論 文
A ThesisSubmitted to Department of Transportation Technology and Management College of Management
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Transportation Technology and Management
July 2007
Hsinchu, Taiwan, Republic of China
雷達微波偵測器交通參數校估演算法
學生:劉至剛 指導教授:卓訓榮 博士國立交通大學運輸科技與管理學系碩士班
摘 要
近年來政府大力推動旅行者資訊系統(ATIS),雖然目前已有許多便民即時的系統 架設完成,但除國道、台北市重要道路以及部份零星地區可茲參考外,其他都市及郊 區資訊嚴重不足,使得推動 ATIS 過程舉步維艱。 應用儀器進行大範圍且長時間的交通資料蒐集,是目前最適當的解決方法,由於 偵測器應用數量相當龐大,因此鋪設與維護成本為重要選擇指標。具有可架設於路側, 同時進行多車道偵測之雷達微波偵測器,是為一個相當適合的解決方案;本研究依據 台灣第一部自行開發之雷達微波交通偵測器架構,開發專屬於此偵測器特有的交通參 數演算法,使得本偵測器具有偵測各車道交通參數資料之功能,如車輛數、佔有率、 車速、車種。 期望經由微波交通偵測器軟硬體規格的確立,引起國內更多學術研究或實務應 用,形成台灣自有的技術產業。 關鍵字:偵測器The Calibration of Traffic Parameters for the Rader Detector
Student:Zhi-Gang Liu Advisors:Dr. Hsun-Jung Cho
Department of Transportation Technology and Management
National Chiao Tung University
Abstract
Recently there are many convenient traffic facilities because the ATIS is impelled by the government in Taiwan. However, the traffic information is destitute except for the highway system and arteries in Taipei, so that the policy dispenses difficultly.
It is the applicable way to amassing the traffic information passim and persistently by detecting instruments. The microwave radar vehicle detector provides installing on the side back and detecting of multi lanes. This research develops the calibration for the first detector manufacturing in Taiwan. It provides the function of computing Traffic parameters to the detector.
This study believes that though the incitant of the hardware and software of radar-vehicle-detector establishing, and it could promote the research and application at this phase and become the proper tech instrument in Taiwan.
誌 謝
經過一段煎熬的時期,本論文於今日終於得以順利完成,首先要感謝恩師卓訓榮教授不辭辛勞 地在兩年的研究所生涯中諄諄教誨與悉心指導;更透過計畫的執行,學習到許多待人處事的道理與接受 不同於學校更多樣化人事物。老師的 T 字理論更是深植於學生的心中,放開心胸的追尋世界的廣博;以 及深入的探究方法與研究的根本,不僅僅是研究上所需要的圭臬,更可活用於待人接物,屏棄心中的成 見,接納各式各樣的批評與忠告,並努力探究工作或興趣上的極致;方可發揮納百川的氣度,往更遠大 的目標邁開扎實的步伐,進而成就自我。 論文撰寫期間,感謝本系許巧鶯老師與黃寬丞老師,對於論文疏漏之處予以指導,使得論文有謬誤 或不甚理想之處得以斧正;論文口試期間,承蒙台灣大學莊晴光教授與許添本教授撥冗審閱,並惠賜寶 貴的意見與指教,使得本論文更加臻備完善,在此致上最深之謝意。在校期間,感謝博士班的健綸學長、 昱光學長、黃恆學長、嘉駿學長、日錦學長給予鼓勵與建議;感謝同門的碩士班同學昱瑄與春馨一同度 過研究所的兩年;以及研一的學弟妹學榮、之音與宜珊,一同經歷許多漫漫長夜完成之報告與活動,彼 此分享歡笑與淚水。 另外感謝許多好友在生活休閒娛樂、課業與精神方面不吝給予支持與鼓勵,感謝我的球友家銘學長、 憲宏學長、祈延、博彥…等,得以兼顧學業與身體健康。並感謝大學好友思文學長、苡萩、志榮、彥仲、 政諺、潁萱、孙彤、格禎、詩敏與文誠…等,在這兩年的學習過程中伴隨著我一同成長與進步;另外特 別感謝實驗室參與過偵測器實測的人員,在烈日環境下進行實測資料的收集,若是沒有你們的幫忙,本 論文不可能完成,還有許多不勝列舉的好朋友們,因為有了你們的幫忙與陪伴,使得我具有無比耐心與 毅力。 最後,以此論文獻給我的父母、家人與親友們,感謝你們多年來無私地給予我經濟上、教育上與生 活上無悔的付出與支持,終於不負眾望順利拿到碩士學位,也達成人生階段中一個重要的舞台的演出, 在邁向下一個舞台之際,先將此小小的成就與大家共同分享。 至剛 謹誌 中華民國九十六年七月 于交大目錄
中文摘要 ... i 英文摘要 ... ii 誌 謝 ... iii 目錄 ... iv 圖目錄 ... v 表目錄 ... vi 第一章 緒論 ... 1 1.1 研究背景 ... 1 1.2 研究動機 ... 2 1.3 研究目的 ... 2 1.4 研究範圍 ... 2 第二章 文獻回顧 ... 3 2.1 雷達微波車輛偵測系統硬體 ... 3 2.2 雷達微波車輛偵測系統軟體 ... 5 2.3 單環形感應線圈偵測器演算法 ... 8 第三章 研究方法 ... 15 3.1 偵測器原理 ... 15 3.2 演算法架構 ... 17 3.3 雷達訊號參數計算 ... 22 第四章 實驗驗證 ... 23 4.1 雷達微波偵測器演算法實測 ... 23 4.2 車種辨識 ... 33 第五章 結論與建議 ... 37 參考文獻 ... 38 附錄一 傅立葉轉換 ... 39 簡 歷 ... 45圖目錄
圖 2.1-1 偵測器外觀 ... 3 圖 2.1-2 偵測器內部架構 ... 4 圖 2.1-3 偵測器運作架構圖 ... 5 圖 2.2-4 自動偵測車道技術架構圖 ... 6 圖 2.2-5 車輛反射波峰值紀錄圖 ... 7 圖 2.2-6 車輛通過相位變化圖 ... 7 圖 2.3-7 單迴圈感應線圈偵測器原理 ... 8 圖 2.3-8 車種分類流程圖 ... 12 圖 3.1-9 車輛通過偵測範圍前情形 ... 15 圖 3.1-10 車輛通過偵測範圍前訊號頻譜 ... 15 圖 3.1-11 車輛進入偵測範圍情形 ... 16 圖 3.1-12 車輛進入偵測範圍訊號頻譜 ... 16 圖 3.1-13 車輛離開偵測範圍情形 ... 16 圖 3.1-14 車輛離開偵測範圍訊號頻譜 ... 17 圖 3.1-15 某小型車自進入至離開偵測範圍峰值振幅變化圖 ... 17 圖 3.2-16 訊號取樣以及車輛瞬時反射能量強度 ... 20 圖 3.2-17 車輛辨識流程圖 ... 21 圖 3.3-18 簡易雷達參數關係圖 ... 22 圖 4.1-19 初代偵測器整體外形 ... 23 圖 4.1-20 初代偵測器應用演算法之架構 ... 24 圖 4.1-21 初代偵測器演算法運行畫面 ... 24 圖 4.1-22 偵測車輛壓佔連續圖一 ... 25 圖 4.1-23 偵測車輛壓佔連續圖二 ... 25 圖 4.1-24 偵測車輛壓佔連續圖三 ... 26 圖 4.1-25 連續車輛通過偵測範圍連續圖一 ... 26 圖 4.1-26 連續車輛通過偵測範圍連續圖二 ... 27 圖 4.1-27 連續車輛通過偵測範圍連續圖三 ... 27 圖 4.1-28 連續車輛通過偵測範圍連續圖四 ... 28 圖 4.1-29 連續車輛通過偵測範圍連續圖五 ... 28 圖 4.1-30 雷達微波偵測器實測位置示意圖 ... 29 圖 4.2.1-31 偵測器整體外形 ... 33表目錄
表 2.3-1 車種典型表徵圖分類表 ... 11 表 4.1-2 流量登記表(往新竹) ... 30 表 4.1-3 流量登記表(往竹北) ... 31 表 4.1-4 車速偵測比較表 ... 32 表 4.2.1-5 偵測器規格表 ... 34 表 4.2.2-6 實測車種辨識結果表 ... 35第一章 緒論
1.1 研究背景 國道公路是台灣地區最重要的交通動脈,大多數南來北往的車輛,都是仰賴國道公 路作為主要的運輸通道。但是近幾年來由於車輛的數目隨著經濟的發展而快速成長;因 此國道公路上也常常發生交通擁擠的狀況,讓駕駛人往往陷於動彈不得的困境之中。為 進行車流的改善與管制,交通部曾委任研究[1],進行於國道架設感測裝置的可行性分析, 研究中指出對於目前台灣國道車流狀況經常發生令人無法忍受的壅圔,如能即時進行監 控與處理,在此飽和狀態下,有一分的改善即有一分的效益,可大大降低影響的社會成 本。 近年來政府大力推動旅行者資訊系統(ATIS),雖然目前已有許多便民即時的系統 架設完成,但是研究報告[2]亦指出國內現階段的即時路況資訊,除國道、台北市重要道 路以及部份零星地區可茲參考外,其他都市及郊區資訊嚴重不足,使得推動 ATIS 過程 中,面臨資訊不足的困境。雖然國道資訊現階段屬於 ATIS 可提供充足資訊的部份,但 如遇年節、連續假日等,所有與國道相關之替代道路,其交通資訊卻相當匱乏;交通部 委任之研究[3],提及國內目前一般道路的路況資訊普遍不足,省道肩負著國道替代道路 的使命,但在國道發生壅圔時,用路者卻往往無法得知省道路況,而可能錯失其選擇最 佳路徑的機會,不但影響用路者行車品質,更影響整體道路的使用效率,並增加社會成 本。 交通參數資料為 ATIS 最根本的部份,蒐集各地大量交通參數資料,必頇仰賴大量 鋪設儀器進行各地交通資料的蒐集,但根據研究[4]指出,目前大量鋪設偵測器,如採用 舊式感應線圈偵測器,每車道將佈設一部,且需管制車流進行維護與安裝,其維護成本 與建構成本相當龐大,若應用新式雷達微波偵測器,由於架設於路測並可進行多車道偵 測,建構成本相較於舊式偵測器,成本應大幅下降,可供政府大量購置鋪設,但目前市 售雷達微波偵測器為國外廠商所販售,大量應用此種偵測器,技術以及維護皆把持於他 人,故為了台灣交通的 ATIS 能繼續提昇,進行台灣自製雷達微波偵測器之開發,即為 一條台灣交通界必定要走的路。1.2 研究動機 交通部運輸研究所之研究計畫:「國道替代道路路況資訊擴充之研究與實作」[3]以及 「自動化路況資訊偵測系統研發與示範(一)」[4]的進行,台灣將開發設計國內自有雷達 微波偵測器,硬體規格依據台灣既有技術與研究,提供偵測器開發需求之技術水準並不 困難,但軟體方面,由於以往偵測器多向國外購買與使用,適合台灣自製雷達微波偵測 器之演算法,產生迫切的需求。 1.3 研究目的 本研究之目的,基於交通部運輸研究所之計畫,所開發的雷達微波偵測器硬體架 構,依據相關文獻與原理,並應用此偵測器特性,開發專屬於此偵測器之交通參數校估 演算法。 1.4 研究範圍 本研究當中雷達微波車輛偵測器系統的相關技術研發,包括有雷達微波模組以及數 位訊號處理器(DSP)之軟硬體部分。雷達微波模組中包含有 RF 模組產生頻率調變連 續波訊號、經過 RF 天線發送,並接收目標區域之反射微波訊號,最後將其所產生之訊 號進行差頻,此部份硬體架構已藉由前述計畫的開發,具有一定成果的展現。 本研究將利用偵測器硬體於車輛通過偵測範圍時,產生之反射差頻訊號,經由所開 發之演算法進行交通參數的運算,找出車輛數、流量、佔有率、車種以及車速等交通參 數,完成偵測器欲收集路段上交通資料的使命。
第二章 文獻回顧
本研究文獻回顧,將透過專利文件,自目前市售車輛偵測器使用的理論技術進行回 顧,以便了解目前雷達微波車輛偵測器的能力範圍;以及進行單一環形偵測器演算法的 回顧。 2.1 雷達微波車輛偵測系統硬體 本小節將回顧市售偵測器 SmartSensor 於美國申請之專利文件[5],完整描述現有偵 測器運行之硬體架構與內部配置情形。下圖為該偵測器外觀構造,細長柱狀物為遠端聯 繫偵測器的天線,用途在於無線傳輸計算的交通參數以及調校偵測器部份參數;兩個半 圓形造型則為創造偵測器偵測天線所需要的空氣介質空間,使得內部平面天線的接收與 發送效果能達到最強的增益。 圖 2.1-1 偵測器外觀 資料來源:[5] 外部構造介紹完畢後,內部架構的構建以及選用設備,對於偵測器所展現的效能, 具有舉足輕重的影響力,由內部架構圖可以發現,偵測器內部共分為三個部份,第一部 份為嵌入式處理單元,此偵測器所應用的嵌入式系統架構為數位訊號處理器(DSP), 此種嵌入式系統具有相當強大的數學運算能力,常用於各種訊號偵測、國防科技…等方 面;第二部份則為無線電頻率發射模組(RF),透過各種不同的射頻技術產生雷達波透 過發送天線加以發射,並以接收天線接收反射波進行差頻,產生可用的中頻訊號送至 DSP 進行數位化、頻譜分析與後續計算應用,完成偵測過程。最後一部分則為吸收層, 採用特殊材質避免 DSP 與 RF 兩大部份產生干擾與雜訊;另外,接收與發送偵測車輛雷達波之平面天線,則裝至於 RF 模組部份的背面,透過外殼特殊設計的空氣介質空間進 行發送與接收,使得天線增益得以達到最佳狀態。 圖 2.1-2 偵測器內部架構 資料來源:[5] 至此,我們可以了解車輛偵測器即是,具有一組無線電發射機構與一組嵌入式系 統,兩者所構成的獨立運作單元。以下將進行偵測器整體運作架構解析,以期更了解偵 測器內部各部份運作的來龍去脈;如運作結構圖所示,虛線範圍為一般狹義的 RF 模組 部份,廣義部份則包含除收發天線、類比數位轉換器、偵測演算法以及交通參數以外的 所有部份;而類比數位轉換器、偵測演算法則屬於嵌入式系統所負責的範圍;因此,偵 測器亦可以區分為三個部份:天線、RF 模組與嵌入式單元三大部份。
圖 2.1-3 偵測器運作架構圖 資料來源:[5] RF 模組部份,此偵測器所採用的雷達波技術為調頻連續波調變技術(FMCW),虛 線部份連續產生不同的訊息頻率,並藉由混波器(Mixer)利用振盪器(Oscillator)所 產生的基頻 10.5GHz 進行訊息搭載,以便進行長距離傳遞;再透過濾波器(Filter)加 以過濾,將超高頻訊號加以濾除後,送入放大器(Amp)將強度放大,而後經由除頻器 (Divider)產生相同的兩組訊號,一組送至發射端供天線加以發射;另一組則送至混波 器作為參考訊號,對於接收訊號進行差頻產生中頻訊號。 中頻訊號則再經由過濾與放大等處理,以便類比數位轉換器加以轉換,在此進行的 訊號處理,除可透過電子元件進行處理;亦可先將訊號進行轉換至數位狀態,在 DSP 內部應用各種訊號處理演算法,將訊號純化降低雜訊的干擾,端看設計者的需求考量。 最後將中頻訊號數位化成為時域狀態的資料,再透過快速傅立葉演算法產生頻域資料, 以便後續交通參數演算法進行資訊的解析。 2.2 雷達微波車輛偵測系統軟體 前述部份為現有偵測器所應用之硬體架構,本章節將回顧偵測器軟體部份的專利文 件[6]。透過偵測器硬體產出中頻訊號,並經由一連串的訊號處理、類比數位轉換與快速 傅立葉轉換,解析出由頻域進行表示的訊號;透過此種表示方法,更容易了解訊號所代 表的訊息物理意義。 此類型車輛偵測器,由於應用 FM-CW 調頻連續波調變技術[7],透過接收訊號的頻 率與訊號強度的關係進行量測,即可找出偵測物體所在距離偵測器多遠的量測距離;此
篇專利文件即是透過此種關連,開發出自動化量測車道技術與自動建立判斷車輛有無門 檻值,方便使用者配合各地方環境進行偵測器架設。 圖 2.2-4 自動偵測車道技術架構圖 資料來源:[6] 透過流程圖可以發現,當偵測資料進入時,先經過一連串的分析與處理,如車輛偵 測的程序,此程序為透過偵測車輛通過偵測器範圍,會在頻譜上產生特定頻率的反射強 度;透過紀錄峰值(Peak)所存在的位置如同下圖,即可產生車輛分佈於對應偵測距離 的機率密度函數(PDF)。
圖 2.2-5 車輛反射波峰值紀錄圖 資料來源:[6] 依照累積圖紀錄數值,將各峰值定為各個車道的中心距離,而兩峰值間最低點則為 車道分隔距離;至此,將車道邊界學習完畢並紀錄各點能量變化狀態,作為判別有無車 輛的參考基準,完成基本的自動學習作業過程,產生出車道數與判別有無車輛通過之所 需門檻值。 圖 2.2-6 車輛通過相位變化圖 資料來源:[6]
經由自動學習完成上述參數計算,此篇專利要求偵測架設稍稍偏向一個角度,利用 車輛通過時的相位(Phase)變化判斷出車輛行進方向;如圖 2.2-5,車輛若由偵測器右 方進入偵測範圍而離去,則為右圖,反之則為左圖。以上為此偵測器完整學習過程,將 車道數、車道範圍、偵測車輛有無門檻值與車輛行進方向共四項參數產生,以利後續偵 測器演算法利用。 2.3 單環形感應線圈偵測器演算法 經由前述部份回顧可得知,目前應用市售偵測器除確定使用 FMCW 技術外,確定 可完成的測量為車道數、車道範圍、偵測車輛有無門檻值與車輛行進方向;但對於交通 參數的量測並未提出如何進行測量,因此本研究將回顧單一環形偵測器演算法,並作為 本偵測器演算法開發之基本原理。 偵測器計算原理之中各項交通參數,可分為經由觀測、估計,以及分類三種方式取 得,以下圖分別說明表示之。 圖 2.3-7 單迴圈感應線圈偵測器原理 資料來源:[8] (1) 觀測 a. 流量(Flow rate): 通常以設定之信號門檻決定是否為有車輛出現(present),當車輛通過 時所造成的信號變化大於門檻值,則計數為出現一次,經過累計得出於單 位時間內的車流量。
流量之計算方式如下: T n q (式 2.3-1) 其中 q :表示流量。 n:表示在時間區間T 中被偵測器偵測到車輛數。 T :表示某一特定時間區間。 b. 佔有率(Occupancy) 佔有率為在特定時間內,所有車輛停留時間所佔的百分比,其計算方 式如下:
n i i t T O 1 100 (式 2.3-2) 其中 n:表示在時間區間T 中被偵測器偵測到車輛數。 T :表示某一特定時間區間。 i t :第i 輛車在偵測器上的時間。 (2) 估計 a. 速度(Speed) 速度的算法是將有效車長加上偵測器長度,再除以離開偵測器時間減 掉進入偵測器時間的時間差。 1 2 ˆ t t D L v (式 2.3-3)其中 v:車輛通過偵測器之速度。 Lˆ:有效車長。 D :偵測器之感測器長度。 1 t :車輛進入偵測器之時間。 2 t :車輛離開偵測器之時間。 b. 平均速度(Average speed) 除了車輛單一速度外,在某一時間區間內之平均速度可由下列式子推 算而得: ) ( ˆ ) ( ) ( ) ( ˆ L j j O j q j v (式 2.3-4) 其中 j:時間區間數列。 ) ( ˆ j v :各個區間的平均測量速度。 ) ( j q :車流量。 ) ( j O :佔有率。 ) ( ˆ j L :推估之平均有效車長(MEVL)。 (3) 分類 c. 車長(Vehicle length) 由於車長與車種有著密切的關係,感應線圈偵測器可利用檢測各種車 輛通過的訊號表徵,將車種進行分類,進而推估出車長。
相關研究[9]指出,波峰數與車輛長度以及汽車底盤存在著一定的關 係,短軸距車輛產生一個波峰;而長軸距車輛則可能產生多個波峰,波峰 相對大小,則代表著車輛金屬部份距離偵測器變異情形。 但需要考量車輛並不一定行駛於車道正中央,而波峰相對位置則代表 車輛金屬部份在車長範圍內分佈狀況,但不同車速則會產生不同的影響。 一般典型車輛分類[10]方式,以五種典型訊號表徵代表五種車種如下圖。 表 2.3-1 車種典型表徵圖分類表 資料來源:[10] 其車種分類流程則如圖 2.3-7,因偵測器每隔一段時間偵測脈衝之有 無,故以脈衝數作為判定變數,感測到脈衝的樣本數則可用來代表時間。
n*=100n/(t1-t2) n*<22? n*>32? A=MAX*n/∑Si B=MIN*n/∑Si A<臨界值? B<臨界值? 車種1 車種2 車種3 車種4 車種5 是 否 否 是 否 是 否 是 MAX 抽樣所得最大靈敏值 MIN 抽樣所得最小靈敏值 N 樣本數 Si 所有樣本靈敏度總和 N* 標準化後樣本數 圖 2.3-8 車種分類流程圖 資料來源:[10] d. 有效車長(MEVL) 而另一個上述式子會用到的參數為有效車長,其推算方式如下: T j i n j i q(, ) (, ) (式 2.3-5)
) , ( 1 ) , ( j i K k k t T j i O (式 2.3-6)k k k v L t (式 2.3-7) 其中 ) , ( ji n :在第 i 個時間區間的第 j個T 中,偵測到的車輛數。 T :偵測器真實運作時間。 ) , ( ji K :在第 i 個時間區間的第 j個T 中,總車輛數的集合。 k t :車輛 k 壓過偵測器的時間。 k L :車輛 k 的有效車長。 又
J i j i O J i O , , 1 ) , ( 1 ) ( (式 2.3-8)
J i j i n JT i q , , 1 ) , ( 1 ) ( (式 2.3-9)
) ( () () 1 ) ( ) ( 1 ) ( i K k k K i k k k L i n i v i q v L JT i O (式 2.3-10)
) , ( (, ) (, ) 1 ) , ( ) , ( 1 ) , ( j i K k k Ki j k k k L j i n j i v j i q v L T j i O (式 2.3-11) 故可求得 MEVL:
) ( ) ( 1 ) ( ˆ i K k k L i n i L (式 2.3-12) 交通參數資料,如車輛數、佔有率、流量,可經由同樣的公式加以應用計算,但車 種與車長具有相當程度的相關性,又車速如採用有效車長加以計算,對於特定車輛偵測 車速,準確率不高;藉由分類找出車種,取得車種即可將假設平均車長進行分類,不再 是一個母體平均車長,進行車輛車速計算,透過經分類過之假設車長,則可使得即時車 輛車速偵測精準度提高;但車種分類流程可以發現,訊號表徵的波長同時受到車長以及車速的影響。即在小型車慢速行駛或大型車高速行駛通過偵測器時,很有可能產生誤 判,使得小車慢速行駛遭致錯誤分類為大車正常速度通過,或大車高速通過遭致誤判, 回傳錯誤偵測資料。 本研究將利用微波偵測器與單環形感應線圈偵測器不同的性質,利用微波偵測器屬 性,將車速與車長兩種變因其一加以固定,而後將偵測車輛進行車種的分類,提供更精 準的假設車長,以提高演算法車輛速率之準確率。
第三章 研究方法
本研究在此章節中,將說明如何應用單一環形偵測器演算法於雷達微波偵測器,而 後探索可應用於演算法中,屬於雷達微波偵測器,可代表車種之特定特徵值,藉此分析 車種之分類。 3.1 偵測器原理 本研究所應用之雷達微波偵測器,如同文獻回顧之偵測器採用 FMCW 技術,在距 離偵測器不同距離下,偵測有無物體對訊號產生雷達波反射面積;該車道偵測範圍為頻 譜中藍色方格區域,以下為車輛通過連續圖。 圖 3.1-9 車輛通過偵測範圍前情形 資料來源:[3] 圖 3.1-10 車輛通過偵測範圍前訊號頻譜 資料來源:[3] 車輛進入偵測範圍前,雷達波並沒有特殊變化,僅有背景物體與系統本身雜訊產生 的回波訊號以及雜波。圖 3.1-11 車輛進入偵測範圍情形 資料來源:[3] 圖 3.1-12 車輛進入偵測範圍訊號頻譜 資料來源:[3] 車輛進入偵測範圍後,偵測器訊號明顯提高,產生如同環形偵測器,因磁力變化而 產生,電力訊號強度高低變化的情形。 圖 3.1-13 車輛離開偵測範圍情形 資料來源:[3]
圖 3.1-14 車輛離開偵測範圍訊號頻譜 資料來源:[3] 峰值振幅 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59 61 63 65 67 69 71 峰值振幅 圖 3.1-15 某小型車自進入至離開偵測範圍峰值振幅變化圖 車輛離開偵測範圍後,訊號回復至車輛進入前的情形,車輛從進入到離開,峰值振 幅變化則如上圖,峰值振幅為每個時間點,該偵測範圍內頻譜振幅強度的最大值。 由此可知,變頻式雷達微波偵測器具有量測物理變量之延時的特性,可計算車輛進 入偵測範圍至離開之總時間,本研究根據此項關係,推論雷達微波調變技術亦可用於車 輛偵測器,並採用環形偵測器的交通參數資料演算法作為開發依據。 3.2 演算法架構 由文獻回顧之單一環形偵測器演算法,可得速度的算法是將有效車長加上偵測器長 度,再除以離開偵測器時間t 減掉進入偵測器時間l t 的時間差,又時間差為每個時間間e 隔 i 的總和,因偵測器運作根據 DSP 時脈固定時間完成每項程序,總時間間隔可應用平 均時間間隔i乘上個數取代,量測車長可視為一函數,受到車種K 以及與偵測器距離 Rvel 控制,而虛擬線圈長度為該偵測距離下雷達偵測範圍,會因為天線場性而有所不同,長 度亦是受到與偵測器距離控制,本研究中將 R 簡化,使用架設高度 H 、架設相距道路距
離 S 、車道數 L 、車道寬w取代之。
) , ( ) ( ) ( , ) , ( , , ) ( ) , ( ) , ( ˆ , ˆ ˆ 2 2 1 v K F v D K f i n Lane Fixed R g D v D Lane K f i n Const w S H w Lane S H R v D R K f i n R K f L i n i t v D L t t t D L v vel vel vel vel vel n k k e l
在固定車道下,資料長度的不同,代表著車輛存在雷達偵測範圍的時間,依據單一 環形偵測器原理計算,本研究認為主要受到兩項因素影響—車輛長度以及車輛速度,而 行駛於道路上的車輛,速度變化相當複雜,不易歸類作為分析判斷的依據,因此,本研 究將從車輛長度,這個相較於車輛速度變化較少的因素,找尋可辨認的特徵。 車輛長度的差別來自於車種的不同,而在雷達辨識領域中,不同辨識目標代表著不 同的雷達目標特徵值(Radar Cross Section,簡稱 RCS),偵測物體被雷達捕捉到的正面 投影面積之大小,即為一般概算的 RCS,使用的計算單位是平方公尺,偵測器接收自物 體反射訊號的強度,與機組本身特性、偵測物體相距偵測器距離以及物體本身的 RCS 有關。 雷達偵測器接收訊號振幅強度,可由公式導出:
a cw N L R G P S T 4 3 2 2 4 (式 3.2-13) 其中 S :訊號振幅強度。 cw P :偵測器訊號模組平均發射功率。 T G :偵測器天線增益比。:偵測器發射雷達波波長。 R :偵測器與測量物體距離。 L :機組系統損耗。 a N :特定軟體增益。 :雷達目標特徵值。
4 4 4 3 2 2 ) ( 4 R K C R S N L R G P S vel a cw T 在本研究中,由於偵測器機組固定使用一組,因此可將公式中,除 (RCS)與 R (測量物體距離)外的參數,其餘視為固定的常數,可得訊號強度與 RCS 成正比,以 及與測量距離成四次方反比,又 RCS 為偵測物體被雷達捕捉到的正面投影面積。由上 述可得,在極微小的時間間隔下,每個時間點的訊號振幅強度正比於該瞬間車輛的車種 所產生的 RCS 值,雖然車輛本身具有固定的 RCS,但偵測器感測範圍,也就是虛擬線 圈長度,並沒有辦法覆蓋完整車長,因此本研究在此應用車輛進入感測範圍長度(最大 不超過虛擬線圈長度)與車長的比例作為該時間點車輛被偵測的 RCS 比例,訊號強度 除正比於 RCS 外,並與車輛進入感測範圍長度之中心點,相對於偵測器距離成四次方 成反比。 因此,本研究假設在同一車道同一車種,以及通過偵測器範圍內均為恆定速度通過 的條件下,車輛以不同速度通過偵測器範圍,如圖 3.2-14,與訊號取樣應用類似的概念, 訊號取樣中,黑點取樣頻率即為紅點取樣頻率兩倍,車輛以較低速度通過為高取樣頻 率,可獲得較完整的資訊,而越高速通過則取樣頻率越低,所獲得資訊越趨貧乏。圖 3.2-16 訊號取樣以及車輛瞬時反射能量強度
偵測物體距離不同則因偵測器架設距離、方向均有固定限制,因此只需建立不同車 種在不同車道,低速通過偵測器範圍資料庫,即可包含大部分距離差異所造成的樣本差 異,並將其作為比較的基底樣本,依據偵測數據長度取樣基底樣本應用平均均方誤差進 行比對,差異最小的車種即為演算法所認定的車種,即完成車種辨識的過程。
欲辨識 資料 車種 資料庫 車輛通過 偵測器範圍 產生資訊 計算資料庫 取樣頻率 產生各車種 比對範本 決定 辨識車種 比對完畢 計算 車速、佔有 率、流量 完成偵測 應用平均均方誤差比對 找出最接近的 車輛範本 圖 3.2-17 車輛辨識流程圖 上圖即為車輛通過偵測器範圍完畢後,進行辨識的程序流程圖,其中車種資料庫則 是事先收集建構於偵測器內,供演算法因應需要而萃取不同時間長度的資訊,進行車種 比對辨識,完成車種辨識後,進而計算其他交通參數,如車速、佔有率、流量,完成偵 測器偵測流程。
3.3 雷達訊號參數計算 雷達基本參數的不同,代表著雷達不同的特性,但是計算參數的原理與方式都是相 同,要應用一支雷達所需要的最基本的參數有脈波重複頻率(PRF)、RF 調變頻寬 (bandwidth)、偵測距離、基頻,如要考慮都普勒效應影響,還需要最大物體偵測速度 (L.O.S. Velocity),取得以上參數後,即可以進行計算。 圖 3.3-18 簡易雷達參數關係圖 根據上圖,我們可以由 PRF 推得掃頻時間(sweep time)為 PRF 的倒數,由調變頻 寬可推得最低距離解析度(Down Range Resolution),即為每個脈波週期代表距離,由 於電磁波行進速度即為光速;因此計算方式為一秒鐘內,由於要發射與接收才能進行量 測的動作,因此可達距離為最大距離的一半,除以每秒幾個脈波週期,就可計算出每週 期所代表的偵測距離。 偵測距離除以每週期所代表的偵測距離,即為需要幾個週期的脈波,再乘以脈波重 複頻率,可得代表距離的完整頻寬;如要考量都普勒效應的影響,則在此時,依據不同 基頻,都普勒效應會有不同的常數,將最大偵測物體速度乘上常數,加入距離頻寬中, 則可避免因為都普勒效應,導致物體偵測頻率超過偵測範圍,形成不正確掃描。依據取 樣定理一個週期至少要取樣兩點,故將加入都普勒效應的完整頻寬乘上兩倍,即為最低 取樣頻率,取樣頻率乘上掃描時間,則可獲得最小離散傅立葉取樣點數,實際應用上, 則以 2 的 2 次方數並不低於最小取樣點數為原則,即為快速傅立葉演算法計算點數。
第四章 實驗驗證
本章節用以證明單一環型偵測器演算法,是否可以應用於雷達微波偵測器技術以及 對車種辨識方法進行驗證。 4.1 雷達微波偵測器演算法實測 本研究已於 2005 年參於交通部運輸研究所「國道替代道路路況資訊擴充之研究與 實作」[3],完成初代雷達微波偵測器的雛形,並進行實測完成計畫。 圖 4.1-19 初代偵測器整體外形 資料來源:[3] 初代偵測器外觀如圖,使用天線為錐形號角型天線,即前方如喇叭口的物體,本實 驗預設條件為虛擬環型線圈長度已知,假設固定車長以求得速度,用以實證理論應用於 雷達微波技術上確實可行。偵測器
Linux on PC Base
NI-DAQ
FFTw
演算法
擷取之訊號
數據
電腦螢幕
訊號
車流資訊
圖 4.1-20 初代偵測器應用演算法之架構 資料來源:[3] 初代偵測器演算法架構如上圖,將車輛通過偵測器所產生的進行實驗,實驗地點有 兩個一為校內運輸研究中心前進行實驗,中心二樓平台距離地面為四點七公尺,實驗狀 況設定為單車道,虛擬線圈長度已先行測量輸入演算法作為已知參數,並固定車長,以 求得車速、壓佔、佔有率等參數。 圖 4.1-21 初代偵測器演算法運行畫面 資料來源:[3] 以下將介紹各種車輛行駛狀況測量情形,用連續圖片表示實驗結果,有壓佔、車輛速度、佔有率、流量等狀況進行偵測實驗:
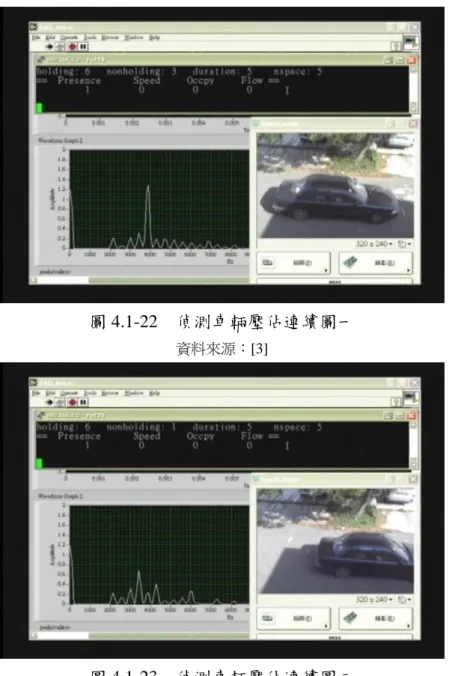
圖 4.1-22 偵測車輛壓佔連續圖一 資料來源:[3]
圖 4.1-23 偵測車輛壓佔連續圖二 資料來源:[3]
圖 4.1-24 偵測車輛壓佔連續圖三 資料來源:[3] 由以上三連續圖片可以發現,當車輛處於虛擬線圈範圍時,參數 Presence 持續為 1, 直到車輛行駛離開偵測器虛擬線圈感應範圍,隨即計算出車速、占有率、流量等交通參 數。 圖 4.1-25 連續車輛通過偵測範圍連續圖一 資料來源:[3]
圖 4.1-26 連續車輛通過偵測範圍連續圖二 資料來源:[3]
圖 4.1-27 連續車輛通過偵測範圍連續圖三 資料來源:[3]
圖 4.1-28 連續車輛通過偵測範圍連續圖四 資料來源:[3] 圖 4.1-29 連續車輛通過偵測範圍連續圖五 資料來源:[3] 以上五張連續圖片,則是模擬車輛連續通過情形,連續圖第一張為第一輛車通過 後,由演算法欄位可發現,偵測器已完成計算第一部車輛所產生的參數,而後經過連續 四張圖片,由最後一張可發現,偵測數據中,車速以及占有率已進行更新,流量亦增加 至 2。
圖 4.1-30 雷達微波偵測器實測位置示意圖 資料來源:[3]
第二實驗地點為新竹市慈雲路靠近公道五路口處,進行連續車流通過的偵測,實驗 環境如圖。實際觀測時間為 20 分鐘,流量準確率計算方式為每分鐘誤差數的總和取絕 對值之後再除以人工計數車輛總和。
表 4.1-2 流量登記表(往新竹) 測試地點 慈雲路靠近公道五路口 調查日期 時間 FMCW 人工 誤差 總誤差% 11:31 2 5 -3 -60% 11:32 7 7 0 0 11:33 8 8 0 0 11:34 6 7 -1 -14.29% 11:35 4 5 -1 -20% 11:36 2 3 -1 -33.33% 11:37 10 11 -1 -9.09% 11:38 6 6 0 0 11:39 3 3 0 0 11:40 7 7 0 0 11:41 7 7 0 0 11:42 7 8 -1 12.5% 11:43 6 5 1 20% 11:44 3 4 -1 -25% 11:45 8 6 2 33.33% 11:46 9 8 1 12.5% 11:47 10 8 2 25% 11:48 7 8 -1 -12.5% 11:49 5 6 -1 -16.67% 11:50 4 6 -2 -33.33% 11:51 4 4 0 0 11:52 4 7 -3 -42.86% 11:53 4 5 -1 -20% 11:54 3 5 -2 -40% 合計 136 149 -13 -8.72% 準確度 91.28% 資料來源:[3] 總體來看,誤差比率為-8.72%,準確度可以達到 91.28%,往新竹方向的流量計算準 確度具有一定水準。
表 4.1-3 流量登記表(往竹北) 測試地點 慈雲路靠近公道五路口 調查日期 時間 FMCW 人工 誤差 總誤差% 11:31 14 7 7 100% 11:32 18 10 8 80% 11:33 17 9 8 88.89% 11:34 13 13 0 0 11:35 13 6 7 116.67% 11:36 8 16 -8 -50% 11:37 19 11 8 72.73% 11:38 14 6 8 133.33% 11:39 13 7 6 85.71% 11:40 14 4 10 250% 11:41 16 7 9 128.57% 11:42 7 8 -1 -12.5% 11:43 13 12 1 8.33% 11:44 13 6 7 116.67% 11:45 15 12 3 25% 11:46 7 4 3 75% 11:47 13 10 3 30% 11:48 31 15 16 106.67% 11:49 12 5 7 140% 11:50 28 9 19 211.11% 11:51 13 12 1 8.33% 11:52 16 14 2 14.29% 11:53 12 6 6 100% 11:54 14 14 0 0 合計 353 223 130 58.30% 準確度 41.70% 資料來源:[3] 往竹北方向車道誤差則相對較大,此車道離偵測器較遠,能量相對較低,又受到其 他車道車輛通過的影響,快速傅立葉所計算出的頻譜,產生柵欄與洩漏效應,會導致在 此車道上,偵測器對於雜訊與確實車輛通過的信號,辨識能力大幅下降,因此流量產生 較多的誤判。
表 4.1-4 車速偵測比較表 測試地點 慈雲路靠近公道五路口 時間 94 年 11 月 18 日(五) 有效樣 本車序 偵測器 測速槍 準確率(%) 有效樣 本車序 偵測器 測速槍 準確率(%) 1 88.4 59 50.17% 16 38.85 44 88.30% 2 55.7 58 96.03% 17 41.28 45 91.73% 3 51.49 60 85.87% 18 36.53 54 67.65% 4 55.04 48 85.33% 19 51.8 49 94.29% 5 96.66 65 51.29% 20 58.92 52 86.69% 6 85.22 54 42.19% 21 56.2 40 59.5% 7 46.1 55 83.82% 22 61.9 61 98.52% 8 20.3 54 37.59% 23 88.06 81 91.28% 9 19.33 56 34.52% 24 51.8 66 78.48% 10 19.01 48 39.60% 25 61.92 57 91.37% 11 41.29 54 76.46% 26 56 64 87.5% 12 51.41 52 98.87% 27 23.6 62 38.06% 13 68.92 62 88.84% 28 76.9 81 94.94% 14 17.93 50 35.86% 29 86.15 64 65.39% 15 86.19 55 43.29% 30 68 56 78.57% 平均準確度 67.45% 資料來源:[3] 車速的計算方式,先將假設車長固定為四公尺放入演算法中求取車速,比較方式則 為同時間利用偵測器與測速槍進行偵測,有效樣本共為 30 筆,平均準確度為 67.45%, 如能利用微波技術的特性偵測車種,即可更精準找出車速,提高車速的偵測準確率。 由以上實驗可知,微波偵測器應用環形線圈演算法作為演算法基礎,進多車道流 量、車輛數、車速偵測為確實可行。分類車種的部份,則由下面章節進行車種辨識的實 驗與模擬,找出車輛低速通過偵測範圍,作為比較樣本之基底,去除速度影響,避免以 往車種辨識,先依據車輛通過時間,再進行特徵值判別,造成大車高速或小車低速,使 得分類過程產生辨識錯誤的影響。
4.2 車種辨識 由於前述實驗之雷達為初代偵測器,其性能無法完全滿足交通上應用,本研究將應 用計畫新開發之偵測器進行車種辨識的實驗與模擬,本章節將分別介紹雷達機組、實驗 結果、模擬軟體、模擬結果四大部份。
4.2.1 雷達機組
由於偵測器機組的更新,本研究所採用微波偵測器以非實驗之初代偵測器體積 更為縮小,重量更經過輕量化,整體外觀如下圖,內部包含 RF 模組、DSP 處理系 統、電源供應器以及平面洩漏波天線共四大部份機組,與個人電腦溝通界面則是採 用 RS-232 進行控制與溝通。 圖 4.2.1-31 偵測器整體外形 資料來源:[4] 以下為偵測器系統規格表,利用上述參數可計算中最佳取樣頻率與取樣點數, 經由快速傅立葉演算法,利用頻譜計算出偵測物體相距偵測器距離,進而辨識車輛 所在位置。表 4.2.1-5 偵測器規格表
脈波重複頻率
500Hz
三角波資料速率
2KHz
RF 頻寬
150MHz
最大範圍頻率
120KHz(60m)
脈波壓緒比
37500
距離解析度
1m
波長
0.0285m
最大偵測速率
200kph
視頻頻寬
250KHz
類比轉數位頻寬
500KHz
取樣點數
512 點
資料來源:[4]4.2.2 車種辨識實驗
本研究將應用 2007 年 5 月 9 日於竹北市高鐵六家站附近之水門實測紀錄資料, 資料內含通過車種、雷射測速槍測速兩項資料,依據本研究之假設,先行固定車道, 選擇同為第三車道的樣本,以及應用其樣本中,大小車種通過車速最慢的作為基底, 分別為時速 31 公里的小客車與時速 38 公里的大型車,利用均方誤差值加以分析比 較各個樣本。表 4.2.2-6 實測車種辨識結果表 編號 車種 實際 車速 小型車樣本均 方誤差值 大型車樣本 均方誤差值 辨識結果 測量車速 1 S 46 16.363 42.954 S 68.2 2 S 45 39.127 39.757 S 34.1 3 L 41 44.152 25.890 L 45.33 4 S 56 22.259 19.988 L 86.55 5 S 35 50.685 62.936 S 68.2 6 S 49 50.594 29.977 L 158.67 7 L 33 65.614 49.220 L 43.27 8 S 43 34.910 38.293 S 45.47 9 S 43 21.535 33.568 S 42.63 10 L 39 40.507 26.014 L 39.67 11 L 41 35.243 39.485 S 31 12 S 41 19.715 46.053 S 45.47 13 S 58 43.1527 15.910 L 158.67 14 S 48 20.210 45.501 S 40.12 15 S 47 26.962 51.570 S 85.25 16 S 36 20.937 37.016 S 45.47 17 S 52 7.584 47.97 S 75.78 18 S 52 38.031 5.778 L 136 19 S 53 32.317 21.575 L 86.55 20 S 55 56.225 24.901 L 86.55 21 S 38 7.924 46.146 S 62 22 S 36 17.978 28.735 S 62 23 S 48 16.710 40.167 S 27.28 24 S 57 19.480 31.185 S 62 25 S 45 49.214 50.142 S 29.65 26 S 48 22.644 52.384 S 45.47 27 S 36 9.237 37.659 S 42.63
28 L 43 34.535 34.418 L 39.67 29 L 39 44.906 43.496 L 35.26 30 S 38 26.296 45.092 S 40.12 由上表可知,共偵測 30 部車輛,24 輛小型車與 6 輛大型車輛,成功辨識 23 輛, 辨識成功率為 76.67%,小型車為辨識成功率為 75%,大型車樣本則為 83.33%的辨 識成功率。 成功辨識的車輛,其個別速度偵測準確率平均為 74.27%,其中包含 18 輛小型 車車速準確率為 66.37%與 5 輛大型車車速準確率 87.85%,相較於未辨識車種的個 別車速計算,尤其是大型車的車速測量,確實提高個別車速測量精準率。
第五章 結論與建議
微波偵測器雖然早有市售產品,但技術以及價格均受到國外廠商把持,自行研發生 產之雷達微波偵測器遂成為提昇台灣交通界一個重要目標,硬體方面,台灣既有技術以 及學術研究,絕對足以提供效能與價格達到世界水準的硬體模組,但軟體方面,相較於 硬體則處於起步階段,本研究應用台灣第一顆自行研發之雷達微波偵測器,開發屬於此 偵測器特有的交通參數演算法,向台灣自製雷達微波偵測器的目標邁進一步。 本研究透過文獻分析、偵測器特性歸納以及實地進行測試,確立單一環形偵測器演 算法可提供雷達微波偵測器,計算車輛數、流量、佔有率、車速偵測的可行性。並利用 如同感應線圈,對於不同車輛通過變化進行車種分類一般,雖然車輛通過偵測範圍使得 反射訊號具有不同強度變化以及時間延時,但透過 RCS 以及車輛相對於偵測器距離兩 項參數,在 RCS 固定下車輛通過偵測範圍其強度變化,車速的不同亦具有一定的規律, 確立依據不同的 RCS 將車種歸類實為可行,經由車種的歸類,假設平均車長較以往符 合代表群體,使得車輛速率的偵測精準度更為提高。 本研究雖證明透過 RCS 以及距離關係,訊號強度變化在 RCS 隨車輛固定條件下, 低速通過偵測範圍的基底樣本描述同一車輛其他速度通過偵測範圍訊號變化,但真實情 況下,同車種之不同車輛,具有不同的 RCS,希望能透過車種資料庫的資料量的提昇, 精確的找出各車型特定的 RCS,使得車種的分類,提昇為車輛的辨識,則假設平均車長, 不在只是一個群體代表性的車長,如小型車、大型車的假設車長,而是偵測車輛確切的 車長,將車輛速率偵測提昇至更精準的狀態。參考文獻
1. 謝正雄等,「台灣區高速公路車流感測裝置的可行性分析」,交通部運輸研究 所,1995。 2. 董啟崇等,「智慧型交通資訊蒐集、處理、傳播與旅行者行為系列之研究—號 誌化道路路況資訊偵測方法與格式訂定」,交通部,2003。 3. 卓訓榮等,「國道替代道路路況資訊擴充之研究與實作」,交通部運輸研究所, 2005。 4. 卓訓榮等,「自動化路況資訊偵測系統研發與示範(一)」,交通部運輸研究所, 2006。5. Arnold et al, “VEHICULAR TRAFFIC SENSOR”, United States Patent US 6,693,557 B2, 2004.
6. Waite et al, “SYSTEM AND METHOD FOR IDENTIFICATION OF TRAFFIC LANE POSITIONS”, United States Patent US 6,556,916 B2, 2003.
7. Chun, J.C., T. S. Kim, J.M. Kim, Z.S. Lim and W.S. Park, “Spectrum Correlation of Beat Signals in the FM-CW Radar Level Meter and Application for Precise Distance”, 2001.
8. Oh, Seri, Stephen G. Ritchie and Cheol Oh,” Real Time Traffic Measurement from Single Loop Inductive Signatures”, Institute of Transportation Studies, 2002. 9. Cheng, Leonard, John Schnablegger and Stan Teply, “Transit Priorities and
Development of A Passive Bus Detection System in Edmonton”, Traffic Engineering + Control, 1979, P.522~P.525.
10. Reijmers, J. T., “On-Line Vehicle Classification”, IEEE Transactions on Vehicular Technology, VOL. VT-29, No.2, May, 1980, P.151~P.161.
附錄一 傅立葉轉換
在本節將會概述本研究所使用到的傅立葉轉換原理,內容包含傅立葉轉換、離 散傅立葉轉換快速演算法。A1.1 傅立葉轉換概述
通訊系統分析原理(曾建誠等著, 2004)中,一個常用的週期信號可表示成如下 的複數信號: t Ae t x( ) j(0t ), 其特性可由三個參數表示:振幅 A,弳度表示的相位,及弳度/秒表示的角 頻率 0或 Hz 表示的頻率 f00/2,或又稱為相量信號。傅立葉級數和轉換的表 示式,則是將此雙重性引申的關鍵,因這二者將信號表示成複指數函數 j t e 的疊加。 時間通常是信號的獨立變數,可以是連續的或離散的加以表示,並沒有一定的 限制,連續時間信號是被定義在連續的時間變數上,如給定在一區間
t0,t0T
的連 續信號x
t ,若定義: 0 0 0 2 2 T f 則其傅立葉級數可定義為
t X e t t t T x n t jn n
0 0 , 0 其中
0 0 0 0 ) ( 1 0 T t t t jn n x t e dt T X 在區間
t0,t0T
上,除了在跳躍不連續點收斂至左、右極限的算術平均外,其 餘均收斂至x
t 。若x
t 為週期T 的週期性函數,則式 2.4.1-23 所代表的傅立葉級數0 在所有t上均為x
t 的正確表示(除不連續點外),此時式 2.4.1-24 可對任意週期積 分。 數位取樣後的信號,表示時間和大小的方式均是利用離散的方式,通常以數列來表示,序列所用的離散化傅立葉積分表示如下:
X e e d n x j j n 2 1 此處
j e X 為
n n j j e n x e X 上述兩式形成序列的傅立葉表示,式 2.4.1-26 為逆傅立葉轉換,亦是一合成公 式,也就是說,x
n 可被拆解成下列無限小的複數弦波的和
d e e X j j n 2 1 其中在一長度為2 的區間上;而 X
ej 決定了每個複數弦波成分的相對量, 雖然式 2.4.1-26 中的選在和 之間,但任意長度為2 的區間均可被使用。 方程式 2.4.1-27 是傅立葉轉換,一個從序列x
n 計算出
j e X 的式子,它可決定 序列x
n 在每個頻率成分所佔有的份量。傅立葉轉換是的複數值函數,如同頻率 響應。我們可把
j e X 亦可表成直角座標的形式:
j I j R j e jX e X e X 而或是極坐標的形式
j j j X ej e e X e X
j e X 和
j e X 是傅立葉轉換的強度和相位。 式 2.4.1-30 中的相角
j e X 並不是唯一標定,因為在任何處,我們可把
j e X 加上2 的整數倍,不會影響複數指數的結果,而將 X
ej 限定在和 之間,則以
j
e X ARG 來表示;若想要把相位函數在 0<<之間弄成連續 函數,則可利用
j
e X arg 加以表示。A1.2 離散傅立葉轉換快速演算法
在信號處理中(蒙以正, 2004),離散傅立葉轉換(Discrete Fourier Transform, 以下簡稱 DFT)能廣泛應用,因可找到高效率快速演算法—離散快速傅立葉轉換
(Fast Fourier Transform,以下簡稱 FFT)是計算 DFT 快速演算法的統稱。 有限長 N 點數列的 DFT 與 IDFT 分別定義為:
, 0,1,..., 1 1 0
N m W k x m X N k km N
1
, 0,1,..., 1 1 0
X mW k N N k x Nkm N m 如果直接計算 N 點數列x
1 的 DFT,對每一頻率分量X
m ,需計算 N 次複數乘 法,N1次複數加法。因此,計算 N 個不同頻率分量X
m ,共需 2 N 次複數乘法,
N1
N 次複數加法,隨著 N 的增大,DFT 和 IDFT 的運算量將急劇增加。雖然 DFT 在信號處理中有著重要的理論意義,但卻無法廣泛應用,原因就是其計算量太大而 無法實用。 直到 1965 年,Cooley 與 Tukey 在數學刊物上,提出了一種 DFT 的快速演算法, 統稱之為 FFT,才使 DFT 的快速運算,隨著電子技術的發展,而得到有效解決。該 法可將計算 N 點數列的 DFT 和 IDFT 複乘及複加次數,降低到約為(N/2)log2N。 而後 DFT 快速演算法類型較多,但其基本數學原理相似,以下將介紹基 2 (Radix 2)時間抽取 FFT 演算法原理作為代表。基 2 時間抽取(Decimation In Time, DIT)FFT 演算法原理,是利用旋轉因數 mk N W 的特性,在時域中,將數列逐次分解為一組子數列,然後利用子數列的 DFT,完成 整個數列的 DFT,從而提高 DFT 的運算效率。 旋轉因數定義如下: mk N j mk N e W 2 該因數具有下列三種特性。 1. 週期性: mk N N m N k N mk N W W W 2. 對稱性:
mk N mk N mk N N mk N W W W W * 23. 可約性: n mk n N mk N nmk nN mk N W W W W / / 假設一數列x
k 的長度為 M N 2 , M 為正整數,對長度為 N 的數列x
k 進行時 間抽取,即將其分解為兩個長度N2點的數列。兩個長度N2點的數列分別為
1 2 ,..., 1 , 0 , 1 2 1 2 ,.., 1 , 0 , 2 2 1 N k k x k x N k k x k x 其中,x1
k 是數列x
k 中,偶數點構成的數列,x2
k 是數列x
k 中,奇數點構 成的數列。將長數列分解為短數列,並利用短數列的 DFT,計算長數列的 DFT, N 點 DFT 的複乘次數為 2 N ,而將 N 點數列分解為兩個N2點的數列後,N2點數列 DFT 的複乘次數為
N2 2,再將兩個短數列 DFT 合成為原本相對應的長數列 DFT,而合 成所需要之巨大運算量,則利用在 DFT 運算中的旋轉因數 mk N W ,具有上述特點,大 幅度縮減。 以下將推導兩個短數列的 DFT,合成相應長數列 DFT 的關係式。由 DFT 的定 義可得:
1 2 0 2 2 1 2 0 2 1 1 2 0 ) 1 2 ( 1 2 0 2 1 ,... 3 , 1 1 ,... 2 , 0 1 0 ] [ ] [ ] 1 2 [ ] 2 [ ] [ ] [ ] [ ]} [ { ] [ N r rm N m N N r rm N N r m r N N r rm N N k km N N k km N N k km N W r x W W r x W r x W r x W k x W k x W k x k x DFT m X 由於旋轉因數具有可約性,即 rm N mr N j mr N j rm N e e W W 2 ) 2 ( 4 4 2 故上式可表示為] [ ] [ ] [ ] [ ] [ 1 2 1 2 0 2 2 1 2 0 2 1 rW W x rW X m W X m x m X Nm N r rm N m N N r rm N
其中的X1
m 和X2
m ,分別是X1
k 和X2
k 對應的N2點 DFT,即 1 2 ,..., 1 , 0 , ] 1 2 [ ] [ ] [ 1 2 ,..., 1 , 0 , ] 2 [ ] [ ] [ 1 2 0 2 1 2 0 2 2 2 1 2 0 2 1 2 0 2 1 1
N m W r x W r x m X N m W r x W r x m X N r rm N N r rm N N r rm N N r rm N 由於X1
m 和X2
m 都隱含有周期性,且周期為N2,即存在 1 2 ,..., 1 , 0 , ] [ ] 2 [ 1 2 ,..., 1 , 0 , ] [ ] 2 [ 2 2 1 1 N m m X N m X N m m X N m X 根據旋轉因數之對稱性 m N m N j N m N e W W W /2 因此 ] [ ] [ ] 2 [ ] 2 [ ] 2 [ 2 1 2 2 1 m X W m X N m X W N m X N m X m N N m N 故綜合上面幾式可得 N 點的X
m 為 1 2 N 0,1,..., m , [m] X ] [ ] 2 [ 1 2 N 0,1,..., m , [m] X ] [ ] [ 2 1 2 1 m N m N W m X N m X W m X m X 將數列x
k 按奇偶分解,得到兩個子數列x1
k 和x2
k,就可以由兩個子數列x1
k 和x2
k 對應的 DFT,表示數列x
k 的 DFT,其合成過程,只需進行N2次複乘 ] [ 2 m X WNmk 。由兩個短數列 DFT 合成對應的長數列 DFT 的過程,可用信號流程圖表 示,由於這個圖形呈蝶形,故稱為蝶形(Butterfly)計算結構,如下圖所示。執行一次蝶形運算之流程 計算一個 N 點數列的 DFT,共需 2 N 次複數乘法,直接計算N2點數列的 DFT, 需
![圖 2.1-3 偵測器運作架構圖 資料來源:[5] RF 模組部份,此偵測器所採用的雷達波技術為調頻連續波調變技術(FMCW) ,虛 線部份連續產生不同的訊息頻率,並藉由混波器(Mixer)利用振盪器(Oscillator)所 產生的基頻 10.5GHz 進行訊息搭載,以便進行長距離傳遞;再透過濾波器(Filter)加 以過濾,將超高頻訊號加以濾除後,送入放大器(Amp)將強度放大,而後經由除頻器 (Divider)產生相同的兩組訊號,一組送至發射端供天線加以發射;另一組則送至混波 器作為參考訊號,對](https://thumb-ap.123doks.com/thumbv2/9libinfo/8752969.206254/13.892.209.734.109.458/偵測器濾波Filter以過濾將超高頻訊號加以濾除後送入另一組則送號對.webp)
![圖 2.2-5 車輛反射波峰值紀錄圖 資料來源:[6] 依照累積圖紀錄數值,將各峰值定為各個車道的中心距離,而兩峰值間最低點則為 車道分隔距離;至此,將車道邊界學習完畢並紀錄各點能量變化狀態,作為判別有無車 輛的參考基準,完成基本的自動學習作業過程,產生出車道數與判別有無車輛通過之所 需門檻值。 圖 2.2-6 車輛通過相位變化圖 資料來源:[6]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8752969.206254/15.892.184.743.122.789/畢並紀錄各點能量變化狀態作為判別有無輛的完成過之所相位變化.webp)
![圖 3.1-11 車輛進入偵測範圍情形 資料來源:[3] 圖 3.1-12 車輛進入偵測範圍訊號頻譜 資料來源:[3] 車輛進入偵測範圍後,偵測器訊號明顯提高,產生如同環形偵測器,因磁力變化而 產生,電力訊號強度高低變化的情形。 圖 3.1-13 車輛離開偵測範圍情形 資料來源:[3]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8752969.206254/24.892.310.623.107.363/資料車輛進入偵測範圍後偵測器訊號明顯提高產生如同環形偵測器因.webp)
![圖 3.1-14 車輛離開偵測範圍訊號頻譜 資料來源:[3] 峰值振幅 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59 61 63 65 67 69 71 峰值振幅 圖 3.1-15 某小型車自進入至離開偵測範圍峰值振幅變化圖 車輛離開偵測範圍後,訊號回復至車輛進入前的情形,車輛從進入到離開,峰值振 幅變化則如上圖,峰值振幅為每個時間點,該偵測範圍內頻譜振幅強度的最大值。 由](https://thumb-ap.123doks.com/thumbv2/9libinfo/8752969.206254/25.892.189.761.107.704/峰值離開偵測範圍後訊號回復至車輛進入情形車輛從進入到離開幅變.webp)

![圖 4.1-24 偵測車輛壓佔連續圖三 資料來源:[3] 由以上三連續圖片可以發現,當車輛處於虛擬線圈範圍時,參數 Presence 持續為 1, 直到車輛行駛離開偵測器虛擬線圈感應範圍,隨即計算出車速、占有率、流量等交通參 數。 圖 4.1-25 連續車輛通過偵測範圍連續圖一 資料來源:[3]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8752969.206254/34.892.244.693.105.416/偵測車由以上持續直到車輛行駛離開偵測器虛擬線圈感連續車輛通.webp)

![圖 4.1-28 連續車輛通過偵測範圍連續圖四 資料來源:[3] 圖 4.1-29 連續車輛通過偵測範圍連續圖五 資料來源:[3] 以上五張連續圖片,則是模擬車輛連續通過情形,連續圖第一張為第一輛車通過 後,由演算法欄位可發現,偵測器已完成計算第一部車輛所產生的參數,而後經過連續 四張圖片,由最後一張可發現,偵測數據中,車速以及占有率已進行更新,流量亦增加 至 2。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8752969.206254/36.892.245.692.106.402/連續車連續車圖第一張為第一輛車通演算第一部車後一張可發現偵.webp)

