定速變旋角風能發電系統在多種風速下的動態分析
蔡明宏1、陳盟仁1、吳有基2、張志明1、劉國才1 1國立高雄應用科技大學電機工程系 2國立聯合大學電機系 E-mail : [email protected]摘 要
本論文主要在探討定速變旋角風能發電系統在多種風速下的動態特性。研究架構主要包括風力機、感 應發電機、以及其他組件。研究範圍除了系統組件的數學模型推導外,也包含了相對應的SimPowerSystems 模組開發以及進一步的動態特性模擬與分析。研究結果顯示此系統在幾種風速下系統變數變動情形都合乎 技術要點的要求。本研究最大的價值是可做為此類型系統規劃、運轉、以及擴充的重要參考。 關鍵詞:風能發電系統、定速、變旋角、SimPowerSystems1. 前 言
2011 年 3 月 11 日日本發生地震及海嘯使得福島核電廠受損造成全球性核能災害,反核聲浪再起,民眾 要求廢除核能電廠,以再生能源取代核能,再生能源勢必成為未來能源之主流。根據統計,全球再生能源 發電的方式中,以風能發電的潛力非凡。根據 GWEC 的統計,至 2010 年底,全球風能發電裝置容量約為 194GW,並且以接近 22.5%的速度在成長,將成為全球各國未來之重要電力來源之一[1]。 在有關風能發電系統的研究方面,文獻[2,3]均提出利用物件導向軟體建構風能發電系統並且進行模擬 的方法並分別模擬了由5 台與 10 台風力機所組成的系統的特性。文獻[4,5]探討了風能發電系統的發電機特 性。文獻[6-8]探討了風能發電系統提出各種控制方法。 本論文主要在探討定速變旋角風能發電系統在定風速、隨機風速、以及陣風情形下的動態特性。本研 究最大的價值是可做為此類型系統規劃、運轉、以及擴充的重要參考。2. 系統架構與模組開發
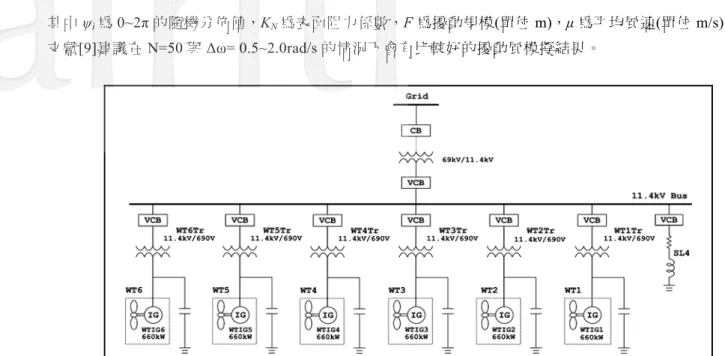
2.1 定速變旋角風能發電系統架構 圖1 為一個實際的定速變旋角風能發電系統架構。此系統的組件包括風力機(Wind Turbine)、感應電 機(Induction Machine)、變壓器(Power Transformer)、功因補償電容器組(PF Compensation Capacitor Bank)、 以及集總的靜態負載(Lumped Static Load)。2.2 風速模型
為了詳細模擬風的動態行為,必須考慮實際的陣風及風速突然變化的情形,本文使用四種風的模型包 括基本風(VWB)、陣風(VWG)、斜坡風(VWR)、隨機風(VWN)[9]。合併風模型可表示成
wind WB WG WR WN
v
=
V
+
V
+
V
+
V
(1)基本風可表示成 WB B
V
=
K
(2) 式中KB為基本風之常數。 陣風之成份可由下面的方程式表示 g cos g g g0
0
s WG s s G s Gt T
V
V
T
t T
T
t T
T
⎧
<
⎪
=
⎨
< <
⎪
>
+
⎩
+
(3) 式中 cos(
/ 2){1 cos 2 [( /
G) (
sg/
G)]}
V
=
MAXG
−
π
t T
−
T
T
(4) 其中TG為陣風週期時間(單位:s),Tsg為陣風開始時間(單位:s),MAXG 為陣風峰值(單位:m/s)。 斜坡風之成份可由下面的方程式表示0
0
sr WR ramp sr er ert T
V
V
T
t T
t T
⎧
<
⎪
=
⎨
<
⎪
>
⎩
<
(5) 式中[1 (
) /(
)]
ramp er sr erV
=
MAXR
− −
t T
T
−
T
(6) 其中MAXR 為斜坡風峰值(單位:m/s),Tsr為斜坡風開始時間(單位:s),Ter為斜坡風結束時間(單位:s)。 隨機風之成份可由下面的方程式表示 1/ 2 12
[ ( )
] cos(
)
N WN V i i i iV
S
ω ω
ω
t
==
∑
Δ
+
φ
(7) 式中( 1/ 2)
ii
ω
= −
Δ
ω
(8) 2 2 22
( )
[1 (
/
) ]
N i V i iK F
S
F
ω
ω
π
ω μπ
=
+
4 / 3 (9)其中ψi為0~2π 的隨機分佈值,KN為表面阻力係數,F 為擾動規模(單位 m),μ 為平均風速(單位 m/s)。參考 文獻[9]建議在 N=50 與 Δω= 0.5~2.0rad/s 的情況下會有比較好的擾動風模擬結果。 圖1 定速變旋角風能發電系統架構圖 2.3 風力機模型 空氣流動會產生風壓推動風力機的葉片,使得葉片旋轉,經由傳動系統將機械功率傳送給發電機。因 此,風能轉換的順序是將風的動能轉換成機械能再轉換成電能。 根據空氣動力學,風力機輸出功率可表示成 3
( , )
2
m p winA
P
=
c
λ β
ρ
v
d (10)其中cp是功率係數(Power Coefficient),λ 是尖端速度比,β 是葉片旋角,ρ 是空氣密度,A 是葉片掃過的面
積,vwind是風速。圖2 為 cp-λ 特性圖[10]。
此外,定速型風力機葉片旋角控制原理是由風力機的實功率與參考功率比較,輸入至葉片旋角增益並 限制其值上下限,來控制風力機葉片旋角角度。參考功率可由風力機輸出功率-轉速特性曲線圖來決定。
2.4 三相感應發電機模型 感應發電機的電壓方程式參考到靜止軸後可表示成 qs s ss m qs ds s ss m ds qr m r m r rr r rr qr dr r m m r rr r rr dr
v
r
pL
0
pL
0
i
v
0
r
pL
0
pL
v
pL
L
r
pL
L
v
L
pL
L
r
pL
i
ω
ω
ω
ω
+
⎡ ⎤ ⎡
⎤ ⎡ ⎤
⎢ ⎥ ⎢
+
⎥ ⎢ ⎥
⎢ ⎥ ⎢
=
⎥ ⎢ ⎥
⎢ ⎥ ⎢
−
+
−
⎥ ⎢ ⎥
⎢ ⎥ ⎢
+
⎥ ⎢ ⎥
⎢ ⎥ ⎢
⎥ ⎢ ⎥
⎣ ⎦ ⎣
⎦ ⎣ ⎦
i
i
(11) 其中vqs及iqs分別是q 軸定子電壓電流,vds及ids 分別是 d 軸定子電壓電流,vdr、idr是d 軸轉子電壓及電流, vqr、iqr 是 q 軸轉子電壓及電流,rs、rr是定子電阻及轉子電阻,Lss、Lrr是定子電感及轉子電感,Lm是磁化 電感,p 是微分運算子。此外,感應發電機的電磁轉矩可表示成 e m qs dr ds qr3
T
nL ( i i
i i )
2
=
−
(12) 其中n 是極對的數目[11,12]。 2.5 三相變壓器模型 三相變壓器的電壓方程式參考到靜止軸後可表示成式(7)。其中 vd1及id1是d 軸一次側電壓及電流,vq1 及iq1是q 軸一次側電壓及電流,vd2及id2是d 軸二次側電壓及電流,vq2及iq2是q 軸二次側電壓及電流,r1 及 r2是一次側電阻及二次側電阻,L11及L22是一次側自感及二次側自感,Lm是磁化電感,p 是微分運算子 [11,12]。 q1 1 11 m q1 d 1 1 11 m d 1 q2 m 2 22 q2 d 2 m 2 22 d 2v
r
pL
0
pL
0
i
v
0
r
pL
0
pL
v
pL
0
r
pL
0
i
v
0
pL
0
r
pL
i
+
⎡
⎤ ⎡
⎤ ⎡ ⎤
⎢
⎥ ⎢
+
⎥ ⎢ ⎥
⎢
⎥ ⎢
=
⎥ ⎢ ⎥
⎢
⎥ ⎢
+
⎥ ⎢ ⎥
⎢
⎥ ⎢
+
⎥ ⎢ ⎥
⎢
⎥ ⎢
⎥ ⎢ ⎥
⎣
⎦ ⎣
⎦ ⎣ ⎦
i
i
(13) 2.6 靜態負載模型 集總的靜態負載可考慮成包含電阻性和電感性負載,其電壓方程式可表示成0
0
qk sk sk qk dk sk sk dkv
r
pL
i
v
r
pL
+
⎡ ⎤ ⎡
⎤ ⎡ ⎤
=
⎢ ⎥ ⎢
+
⎥ ⎢ ⎥
⎣ ⎦ ⎣
⎦ ⎣ ⎦
(14) 其中vdk及idk是d 軸電壓及電流,vqk及iqk是q 軸電壓及電流,rsk及Lsk是電阻及電感,p 是微分運算子[7,8]。3. 動態特性模擬
3.1 SimPowerSystems 模組架構 圖3 為使用 SimPowerSystems 開發的模組[13],主要包括三部分-A 部分為 11.4kV 市電,B 部分為靜 態負載,C 部份為定速變旋角風能發電系統。 圖3 SimPowerSystems 架構圖 3.2 模擬項目 本研究模擬了風力機在五種不同風速下的動態特性。模擬一為低於標稱風速14m/s 時定風速 10m/s,模 擬二為低於標稱風速時隨機風速,模擬三為高於標稱風速時定風速18m/s,模擬四為高於標稱風速時隨機風 速,模擬五為高於標稱風速的陣風。 3.3 模擬結果 圖4~8 分別為模擬一~五系統變數變動的情形,所有的變數都以個別組件的容量為標么基底表示。 圖 4 為模擬一的結果。圖 4(a)顯示風速固定在 10m/s。圖 4(b)顯示由於風速低於風力機的標稱風速 14m/s,因此旋角控制器不會動作,葉片旋角為 0。圖 4(c)顯示風力機的轉速維持在同步速度以上而且轉速 隨著風速的增減而增減。圖 4(d)顯示感應電機的轉矩為負值這意味著它處於發電機狀態,而且轉矩大小也 會隨著風速變化。圖4(e)、4(f)顯示市電供應的實功率會隨著風力機的加入而降低,虛功率則沒有太大的變 化。圖4(g)顯示風力機端電壓幾乎維持在定值。圖 4(h)、4(i)顯示風力機側的變壓器輸出實功率及虛功率, 因為有電容器改善功率因數使得虛功率接近於0。 圖5 為模擬二的結果,除了圖 5(a)的風速不同外,其它系統變數的情形與模擬一相似。 圖 6 為模擬三的結果。圖 6(a)顯示風速固定在 18m/s。圖 6(b)顯示由於風速高於風力機的標稱風速 14m/s,因此旋角控制器會動作。圖 6(c)顯示風力機的轉速維持在同步速度之上,但會隨著葉片旋角而改變, 旋角愈大轉速變慢。圖 6(d)顯示感應電機的轉矩為負值這意味著它處於發電機狀態,而且轉矩大小受到旋 角變化的影響。圖6(e)、6(f)顯示市電供應的實功率會隨著風力機的加入而降低,虛功率則沒有太大的變化。 圖6(g)顯示風力機端電壓幾乎維持在定值。圖 6(h)、6(i)顯示風力機側的變壓器輸出實功率及虛功率,因為 有電容器改善功率因數使得虛功率接近於0。 圖7 為模擬四的結果,除了圖 7(a)的風速不同外,其它系統變數的情形與模擬三相似。 圖8 為模擬五的結果,除了圖 8(a)的風速不同外,其它系統變數的情形與模擬三相似。4. 結 論
本論文主要在探討一個實際的定速變旋角風能發電系統在定風速、隨機風速、以及陣風情形下的動態 特性。模擬結果顯示此類型風力機的轉速均略高於同步速度,當風速高於標稱風速時,風力機的旋角控制 器會動作使得風力機的輸出功率維持在定值。整體而言,此系統在這幾種風速下系統變數變動情形都合乎 技術要點的要求。本研究最大的價值是可做為風力站規劃、運轉、以及擴充的重要參考。參考文獻
[1] 世界風能協會 ,http://www.gwec.net[2] R. Chedid, N. Lawhite, and M. Llic, “Simulating Dynamic Interactions of Grid-Linked Wind Turbine,” IEEE Computer
Applications in Power Systems, Vol. 7, No. 4, pp.46-49, 1994
[3] Tapia Arantxa, T. Gerardo, O. Xabier, and M. Julian, “Digital Simulation Performance of a Wind Farm,” IEEE
Mediterranean Electrotechnical Conference, 2000, pp.1153-1156
[4] Rajib Datta, V. T. Ranganathan, “Variable-Speed Wind Power Generation Using Doubly Fed Wound Rotor Induction Machine- A Comparison with Alternative Schemes, ” IEEE Transaction on Energy Conversion, Vol. 17, pp.414 -421, Sep. 2002
[5] Janaka B. Ekanayake, Lee Holdsworth, XueGuang Wu, Nicholas Jenkins, “Dynamic Modeling of Doubly Fed Induction Generator Wind Turbines,” IEEE Transaction on Power Systems, Vol. 18, pp.803 -809, May 2003
[6] Hua Geng, Geng Yang, “Output Power Control for Variable-Speed Variable-Pitch Wind Generation Systems, ” IEEE
Transactions on Energy Conversion, Vol. 25, pp.494-503, June 2010
[7] A. Tabesh, R. Iravani, “Small-Signal Model and Dynamic Analysis of Variable Speed Induction Machine Wind Farms, ”
IET Renewable Power Generation, Vol. 2, pp.215-227, 2008
[8] S. M. Muyeen, Rion Takahashi, Toshiaki Murata, and Junji Tamura, “A Variable Speed Wind Turbine Control Strategy to Meet Wind Farm Grid Code Requirements,” IEEE Transactions on Power Systems, Vol. 25, pp.331-340, Feb. 2010 [9] P. M. Anderson and A. Bose, “Stability Simulation of Wind Turbine Systems,” IEEE Transactions on Power Apparatus
and Systems, Vol. 102, No. 12, pp.3791-3795, Dec. 1983
[10] S. Heier, Grid Integration of Wind Energy Conversion Systems, 2nd Ed, John Wiley & Sons Ltd., June 2006
[11] P. C. Krause, Analysis of Electric Machinery and Drive System, 2nd Ed, McGRAW-Hill Book Co., USA, March 2002 [12] C. M. Ong, Dynamic Simulation of Electric Machinery using MATLAB/Simulink, McGRAW- Hill Book Co., USA, 1998 [13] SimPowerSystems User’s Guide, Hydro- Quebec TransEnergie International, 2005
(a) 風速 (d) WTIG1 轉矩 (g) WT1Tr 二次側電壓
(b) WT1 的旋角 (e) 11.4kV 市電實功率 (h) WT1Tr 一次側實功率
(c) WTIG1 轉速 (f) 11.4kV 市電虛功率 (i) WT1Tr 一次側虛功率
(a) 風速 (d) WTIG1 轉矩 (g) WT1Tr 二次側平均電壓
(b) WT1 的旋角 (e) 11.4kV 市電實功率 (h) WT1Tr 一次側實功率
(c) WTIG1 轉速 (f) 11.4kV 市電虛功率 (i) WT1Tr 一次側虛功率
(a) 風速 (d)WTIG1 轉矩 (g) WT1Tr 二次側平均電壓
(b) WT1 的旋角 (e) 11.4kV 市電實功率 (h) WT1Tr 一次側實功率
(c) WTIG1 轉速 (f) 11.4kV 市電虛功率 (i) WT1Tr 一次側虛功率
(a) 風速 (d) WTIG1 轉矩 (g) WT1Tr 二次側平均電壓
(b) WT1 的旋角 (e) 11.4kV 市電實功率 (h) WT1Tr 一次側實功率
(c) WTIG1 轉速 (f) 11.4kV 市電虛功率 (i) WT1Tr 一次側虛功率
(a) 風速 (d) WTIG1 轉矩 (g) WT1Tr 二次側平均電壓
(b) WT1 的旋角 (e) 11.4kV 市電實功率 (h) WT1Tr 一次側實功率
(c) WTIG1 轉速 (f) 11.4kV 市電虛功率 (i) WT1Tr 一次側虛功率