國
立
交
通
大
學
資訊科學與工程研究所
博 士 論 文
模糊邏輯控制於語者調適及
音訊事件偵測之參數調適
On the Use of Fuzzy Logic Control in Adaptive Parameter
Tuning for Speaker Adaptation and Audio Event Detection
研 究 生:丁英智
指導教授:林正中 教授
模糊邏輯控制於語者調適及音訊事件偵測之參數調適
On the Use of Fuzzy Logic Control in Adaptive Parameter
Tuning for Speaker Adaptation and Audio Event Detection
研 究 生:丁英智 Student:Ing-Jr Ding
指導教授:林正中 Advisor:Cheng-Chung Lin
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
博 士 論 文
A ThesisSubmitted to Institute of Computer Science and Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Doctor of Philosophy
in
Computer Science and Engineering
December 2008
Hsinchu, Taiwan, Republic of China
模糊邏輯控制於語者調適及音訊事件偵測之參數調適
學生:丁英智 指導教授:林正中 博士
國立交通大學 資訊科學與工程研究所
摘
要
本篇論文在語者調適(speaker adaptation, SA)領域及音訊事件偵測(audio event
detection)領域中導入了模糊邏輯控制(fuzzy logic control, FLC)機制以強化調適品 質,從而改善自動語音辨識(automatic speech recognition, ASR)系統及音訊事件辨 認(audio event recognition)系統的辨識性能。個人提出了數個結合模糊邏輯控制器 的方法以有效地掌控辨識系統中的不定參數,進而使系統在處於極為不利的辨識 情況時仍能保持令人滿意之辨識結果。對於語者調適領域,個人針對兩個廣為流 傳的調適技術範疇:貝氏調適(Bayesian-based)及轉換調適(transformation-based) 置入 FLC 調控機制。最大後機率(maximum a posteriori, MAP)估測調適是一種貝 氏調適的典型方法。根據 MAP 方法,個人提出了結合一適當的模糊控制器的
FCMAP 方法。所發展之 FCMAP 可以藉由所設計的模糊控制器依據調適語料量 之多寡有效地糾正隱藏式馬可夫模型(hidden Markov model, HMM)參數。然而,
MAP 僅針對調適語料所涉及的 HMM 參數進行調適的改善,對於絕大部份沒有 調適語料的 HMM 參數並無法提供有效的助益;FCMAP 亦承繼此一弱點。由於 向量場平滑化方法(vector field smoothing, VFS)可以填補 MAP 方法的此項弱點, 因此,個人延續 FCMAP 的設計概念而提出了在 VFS 調適程序中整合一個模糊 邏輯控制器的 FLC-VFS 調適方法以對較多無調適語料的 HMM 參數在調適上提 供有效的改善。目前廣為使用之最大可能性線性迴歸(maximum likelihood linear
個 FLC-MLLR 調適方法以確保傳統 MLLR 在遭遇調適語料稀少時的強健性。 FLC-MLLR 調適程序乃先建構一種像 MAP 方法的模型結合調適方式,而後再利 用所設計的 FLC 依據調適語料量之多寡以決定需參考語 者不相關(speaker independent, SI)模型之程度。再者,對於特定音訊事件的偵測,個人也提出了一 個在 FLC 的架構之下實現可變動長度之決定視窗的辨識方法。實驗結果顯示在 本篇論文中所提出各個整合 FLC 調控機制的方法之辨識精確度皆明顯優於傳統 的方法。
On the Use of Fuzzy Logic Control in Adaptive Parameter
Tuning for Speaker Adaptation and Audio Event Detection
–––––––––––––––––––––––––––––––––––––––––student:Ing-Jr Ding Advisors:Dr. Cheng-Chung Lin
Institute of Computer Science and Engineering
National Chiao Tung University
ABSTRACT
In this dissertation, the exploitation of fuzzy logic control (FLC) mechanism in the
fields of speaker adaptation (SA) and audio event detection is thoroughly investigated,
specifically in the reliable determination of HMM acoustic parameters and in decision
window regulation for enhancing the system recognition performance, given ordinary
or adverse conditions in both training and operating stages.
For speaker adaptation against data scarcity, the author managed to engineer the
FLC mechanism into the MAP and VFS estimate of HMM parameters for
Bayesian-based adaptation; also into the MLLR estimate for transformation-based
adaptation.
For the detection of singular audio event detection, the author developed an
efficacious measure by varying the length of the decision window (DW) under the
framework of FLC operation such that, depending on audio-tension in the context, the
rate of decision making would adapt accordingly.
acoustic parameters for speaker adaptation and audio event detection has been rarely
attempted. Experiment results showed that the adaptation with the support of FLC do
have several edges on those without.
(1) better performance in ordinary case,
(2) robustness against the scarcity of training data,
(3) less computation in parameter estimation as compared to other propositions on
MLLR-enhancement.
And the detection with FLC support also demonstrates the capacity of self-adjustment in DW size depending on the context while achieving better recognition performance as compared to those running with fixed DW whose sizes are inappropriately selected.
Acknowledgement
I would like to express my sincere thanks to my advisor, Prof. Cheng-Chung Lin.
Without his supervision and perspicacious advice, I can not complete this dissertation.
Special thanks to my committee members, Prof. Hsiao-Chuan Wang, Prof. Hsin-Min
Wang, Prof. Ching-Kuen Lee, and Prof. Berlin Chen for their valuable comments.
I also express my appreciation to all the faculty, staff and colleagues in the
Department of Computer Science and Information Engineering, NCTU.
Finally, I am grateful to my family, my father, mother, brother and friends for their
Contents
Abstract in Chinese.………..…...………..……..……...i Abstract in English………..…………...…..………..……..…….iii Acknowledgement………..………..v Contents………..………...………..………..….vi List of Figures…………..………...………..….viii List of Tables………....………...………...…....x 1. Introduction…………..….………...………..…….……...11.1 Scope of the Dissertation…...…………...………..…….……..2
1.2 Speaker Adaptation………...………...………...……3
1.3 Audio Event Detection………….….………...……….8
2. Overview on Speech Recognition and Audio Event Detection....…....…...…..12
2.1 HMM Speech Modeling ……..………..……..……….14
2.1.1 HMM and Mandarin Syllable Modeling……..…..………..……..14
2.1.2 Estimation and Decoding of HMM……….….…………...16
2.2 Speaker Adaptation………..……….………..….………….18
2.2.1 Bayesian-based Adaptation……..……...………...……….20
2.2.2 Transformation-based Adaptation………….…..….….……...………...23
2.2.3 Speaker-clustering-based Adaptation……..…………...………...……..27
2.3 Audio Event Detection………..……….……….. …………..….….28
2.3.1 GMM Models and Classifiers……...……...………..……..30
2.3.1.1 GMMs Establishment…..….…....……....………..……..30
2.3.1.2 GMM Classifier……..…...…....………….………..……..32
2.3.2 Decision Window of the Classifier ……..…..……….……..……….33
3. Fuzzy Set Theory and Logic Control..…...…...….…...…..……...………..35
3.1 Fuzzy Schemes and Speech Recognition..………..….………...37
3.2 Fuzzy Logic Controller (FLC)…..……….………..….………….41
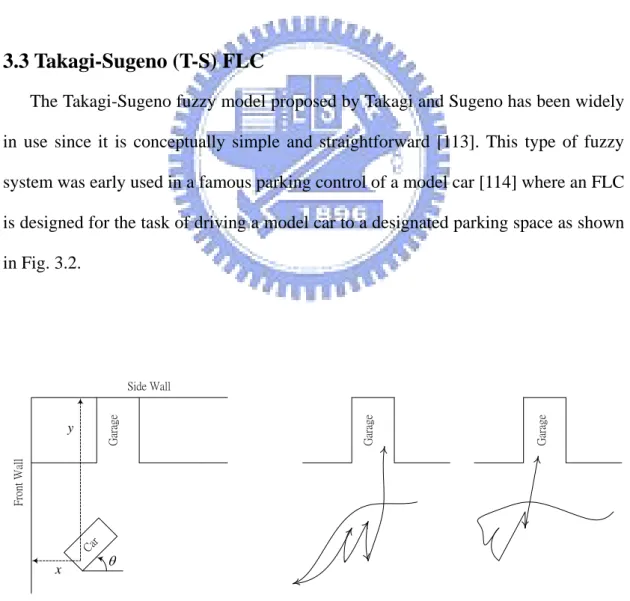
3.3 Takagi-Sugeno (T-S) FLC……....…..………...……….44
4. Speaker Adaptation Based on MAP Using a Fuzzy Controller..……...……...49
4.1 FCMAP Adaptation…………..…………..….………...……….51
4.2 Experiments…………..….………...………..…….……55
4.2.1 Database and Experiment Design………...….………...………55
4.2.2 Experiment Results………….….…..…………...………...58
5.1 FLC-VFS Adaptation.….………...………..…….……69
5.2 Experiments…………..….………...………..…….……73
5.2.1 Database and Experiment Design………….….………...………73
5.2.2 Experimental Results…………..………...………...75
6. Incremental MLLR Speaker Adaptation by Fuzzy Logic Control………...79
6.1 Incremental MLLR Adaptation (MAP-Like Adaptation)………....………….80
6.2 FLC-MLLR Adaptation (FCMAP-Like in Form)...………...85
6.3 Experiments…………..….………...………..…….…....90
6.3.1 Database and Experiment Design………...……....90
6.3.2 Experimental Results…………..….………..………...94
6.4 Fuzzy Mechanisms for the Context of Multiple Regression Classes…..……..98
7. Audio Event Detection Using Variable-Length Decision Windows…...…...100
7.1 Concepts of Short Timeslot Likelihood Difference (STLD)..……… .…....…101
7.2 Decision Windows Governed by an STLD-Driven FLC……..….….……….102
7.3 Experiments…………..….………...………..…….…..107
7.3.1 Experiment Designs…….…………..………..…………...………..107
7.3.2 Experiment Results…………....…..………...……….107
8. Conclusions and Future Works…..….……..……...………113
8.1 HMM Speaker Adaptation with FLC………..…………..…….…..113
8.2 DW and GMM Adaptation with FLC………..………..…….….115
8.3 Future Developments……..……….………..…….….115
List of Figures
Fig. 1.1 Speech/Audio information processing represented by a myriad
of branches……….………....3
Fig. 1.2 The operating structure of a typical speech recognition system………...4
Fig. 1.3 Three categories of speaker adaptation techniques in speech recognition……5
Fig. 1.4 Eigenvoice-based adaptation………..…...7
Fig. 1.5 Speaker adaptation scheme………...8
Fig. 2.1 The front-end processing procedure in preparation of subsequent audio analysis………..………..………..13
Fig. 2.2 3-state HMM model for the initial sub-syllable…………..……….………...16
Fig. 2.3 6-state HMM model for the final sub-syllable (i = 1 ~ 6)……..……...…….16
Fig. 2.4 Audio event detection system……….29
Fig. 2.5 The conventional fixed-length decision window (DW)………..33
Fig. 3.1 Architecture of a typical FLC……..………...41
Fig. 3.2 Sugeno’s FLC for car parking….……..……….………44
Fig. 3.3 Designs of Takagi-Sugeno (T-S) fuzzy model………..………..…...…46
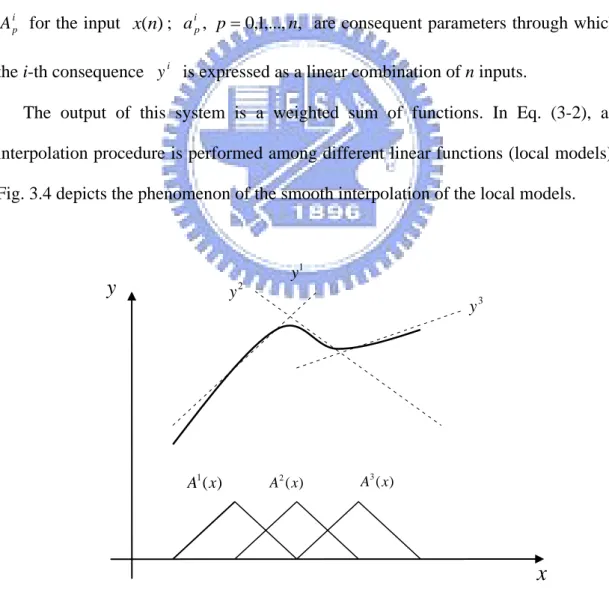
Fig. 3.4 System output of T-S fuzzy model in an interpolation form...…….……..47
Fig. 4.1 Membership functions of fuzzy controllers for FCMAP adaptation…..……52
Fig. 4.2 Average recognition rates by 5 speakers using MAP with/without a fuzzy controller, using identical adaptation and testing data…..……..……...62
Fig. 4.3 Average recognition rates by 5 speakers using MAP with/without a fuzzy controller, using different adaptation and testing data…..……..……...62
Fig. 4.4 The number of adaptation utterances = 2 (MAP testing experiments)…...…63
Fig. 4.5 The number of adaptation utterances = 30 (MAP testing experiments)...…..64
Fig. 5.1 Rationale behind VFS adaptation………..……….67
Fig. 5.2 Membership functions of the FLC for FLC-VFS adaptation…….….…...69
Fig. 5.3 Average recognition rates of MAP, MAP-VFS and MAP-FLCVFS with f 20 for VFS and 30 for MAP………..76
Fig. 5.4 Numbers of adaptation utterances = 10 (VFS testing experiments)………...77
Fig. 5.5 Numbers of adaptation utterances = 100 (VFS testing experiments)……….78
Fig. 6.1 MLLR-adaptation under incremental control (MAP-like adaptation)….82 Fig. 6.2 An investigating procedure on the role of in incremental MLLR adaptation given a specific amount of adaptation data…….………...83
Fig. 6.3 required for holding back Ws transformation effect under various numbers of adaptation utterances………...84
Fig. 6.4 Moving toward s or Wss? And for how much?………..……….85
Fig. 6.5 Membership functions of the FLC for FLC-MLLR adaptation…..………...87
Fig. 6.6 The curve of the training values of in FLC-MLLR adaptation…………95
Fig. 6.7 The performance curves of FLC-MLLR, MAPLR and conventional MLLR in the recognition testing experiments of the different amount of adaptation data...96
Fig. 6.8 Numbers of adaptation utterances = 2 (MLLR testing experiments)……....97
Fig. 6.9 Numbers of adaptation utterances = 10 (MLLR testing experiments)....…..97
Fig. 7.1 DW with fixed-length, each covering the same number of audio frames, n, over the time span..………..…………..………100
Fig. 7.2 DWs with variable length governed by STLD (Short Timeslot Likelihood Difference) indices………...102
Fig. 7.3 Membership functions of the STLD-driven FLC………..…………...104
Fig. 7.4 Living room audio event detection………..….111
Fig. 7.5 Parking lot audio event detection………..…112
List of Tables
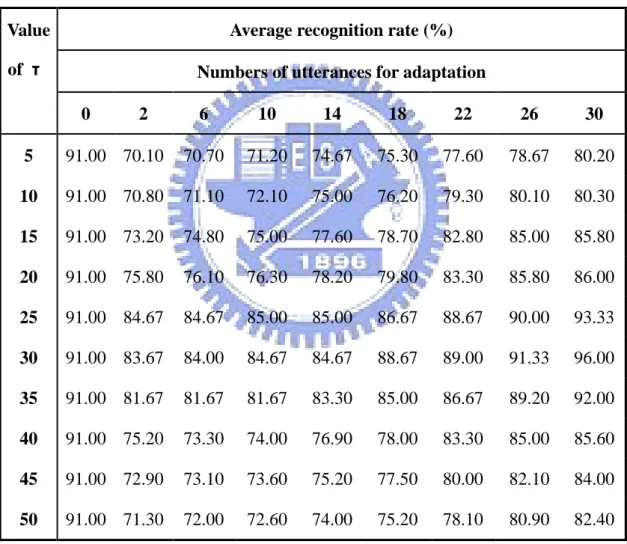
Table 1.1 A comparison between audio and visual media..……….………...2 Table 4.1 Average recognition rates (%) of the conventional MAP with
various τ ..………..60 Table 4.2 Recognition rates (%) of FCMAP and MAP (with a fixed τ
of 25 or 30)………....61 Table 5.1 Average recognition rates (%) by conventional MAP-VFS adaptation
with various f………..………..75 Table 6.1 inclination w.r.t. the variation in the quantity of adaptation data
in pursuit of recognition rate above baseline………..…….……..…………82 Table 7.1 Event detection by an FLC-regulated DW, using only LPC feature…..…109 Table 7.2 Event detection by fixed-length DW, using only LPC feature….……….109 Table 7.3 Event detection by an FLC-regulated DW, using only LPCC feature...110 Table 7.4 Event detection by fixed-length DW, using only LPCC feature..….…….110 Table 7.5 Event detection by an FLC-regulated DW, using only MFCC feature.….110 Table 7.6 Event detection by fixed-length DW, using only MFCC feature……..….111
Chapter 1
Introduction
Intelligent human-machine interaction stresses the use of vocal and visual
information as the communicating media such that the machines could interact with
people just the same as people do with one another. For the visual part, the
information process is afferent and the machine needs such device as CCD camera for
taking pictures or video sequences as the visual input from which the configuration of
the surroundings and even the status/situation reflected by the context have to be
figured out such that the machine is claimed to be able to SEE. Computer vision is the
discipline taking care of this portion of the job [1, 2].
However, the process of auditory information is both afferent and efferent. The
machine would require the microphone and recorder as the input devices for
collecting audio streams on which analysis is to be performed so that speech can be
recognized, speaker can be identified and types of audio events can be categorized,
etc; the machine also needs the synthesizer and speaker as the output devices for vocal
reactions to the people. Interestingly enough, as a counterpart of computer vision,
there is no such discipline as of “computer audition” in the realm of audio processing.
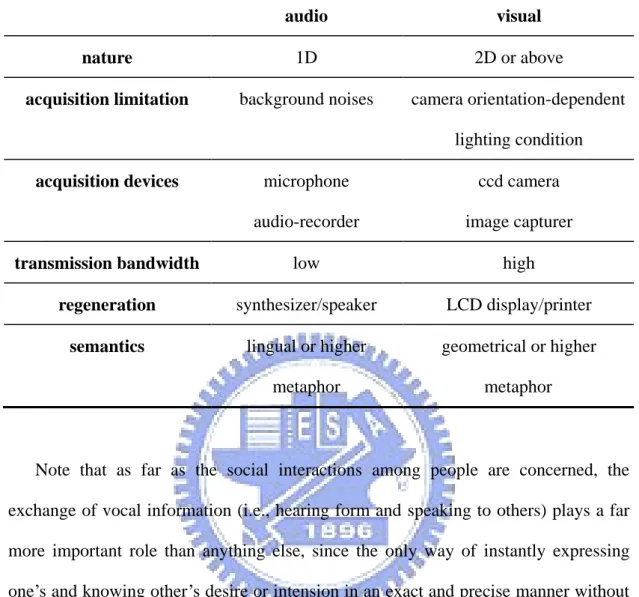
From the standpoint of signal processing, a comparison between the two media is
Table 1.1. A comparison between audio and visual media.
audio visual
nature 1D 2D or above
acquisition limitation background noises camera orientation-dependent lighting condition
acquisition devices microphone audio-recorder
ccd camera
image capturer
transmission bandwidth low high
regeneration synthesizer/speaker LCD display/printer
semantics lingual or higher
metaphor
geometrical or higher
metaphor
Note that as far as the social interactions among people are concerned, the
exchange of vocal information (i.e., hearing form and speaking to others) plays a far
more important role than anything else, since the only way of instantly expressing
one’s and knowing other’s desire or intension in an exact and precise manner without
ambiguity is through the exercise of conversation. This is true for the kids in the
preschool, as well as for various professionals in their serious careers.
The subjects in this dissertation concerns the computing techniques involved in
the process of vocal information rather than visual one, specifically speaker
adaptation schemes associated with MAP, VFS and MLLR, and audio event detection
with variable decision window, which are to be briefed in the following sections.
1.1 Scope of the Dissertation
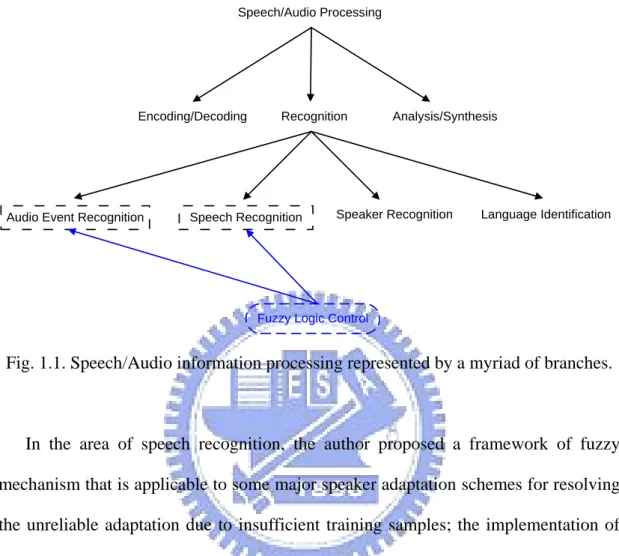
branches including, but not limited to, those shown in Fig. 1.1.
Fuzzy Logic Control Speech/Audio Processing
Encoding/Decoding Recognition Analysis/Synthesis
Speech Recognition Speaker Recognition Language Identification Audio Event Recognition
Fig. 1.1. Speech/Audio information processing represented by a myriad of branches.
In the area of speech recognition, the author proposed a framework of fuzzy
mechanism that is applicable to some major speaker adaptation schemes for resolving
the unreliable adaptation due to insufficient training samples; the implementation of
which, a series of fuzzy logic controllers embedded in MAP, VFS and MLLR
adaptations, has proven themselves by achieving far superior recognition rate at
extreme adverse conditions.
The same framework is also applied to the detection of female screaming against
different degree of background interferences, where the width of decision window
scanning through the input audio stream was adjusted by a context-driven fuzzy logic
controller.
1.2 Speaker Adaptation
and, with the ever growing maturity, have found more and more applications in
current daily life [4]. Nevertheless, the recognition performance of all speech
recognition systems ever built is undeniably inferior to a human listener as already
pointed out in [5].
Fig. 1.2. The operating structure of a typical speech recognition system.
Fig. 1.2 depicts the operating structure of a typical speech recognition system for
capturing specific short phrases or primitive statements only. Note that during the
operation any disturbances causing a mismatch between the pre-established reference
templates and the testing template would compromise the recognition performance
and the sources of disturbances may include
speech from speakers strange to the system
speech from speaker known to the system, only in poor “vocal shape” various interferences in the background
channel distortion induced in the acquisition process and so forth.
Countermeasures can be taken in two aspects:
Pre-processing -Framing -Pre-emphasis -Hamming window Signal input Feature extraction Reference templates Testing template Training Template matching Recognized result
(1) Signal filtering and normalization are deployed so that the operating condition is
in as much alignment with the referential condition as could be done.
(2) Internal tuning of the referential settings is undertaken so that the system adapts
toward the actual operating environment when new speakers appear.
Techniques in the first category work at the level of signal processing, and are
referred to as speech enhancement or feature-based adaptation through which noises
adhered to the signals are removed to make the speech signals as clean and thus
resemble to reference templates as possible. The cepstral mean normalization (CMN,
or cepstral mean subtraction CMS) [6] and signal bias removal (SBR) [7] fall into this
category too and are popular for their simplicity and effectiveness.
Approaches in the second category use sample utterances collected from the new
speaker (the end-user of the system) for adapting the system internal parameter
settings of the pre-established speech model. Consequently, they are referred to as
model-based adaptation or speaker adaptation.
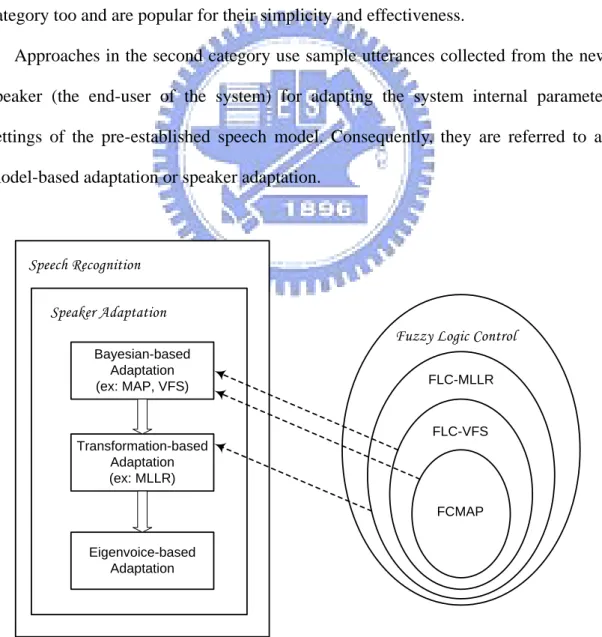
Speech Recognition Speaker Adaptation Bayesian-based Adaptation (ex: MAP, VFS) Transformation-based Adaptation (ex: MLLR) Eigenvoice-based Adaptation
Fuzzy Logic Control
FLC-VFS
FCMAP FLC-MLLR
Fig. 1.3 reveals the chronological development of the three major speaker
adaptation schemes. MAP adaptation, appearing around 1991 and the representative
of Bayesian-based adaptation, works better than the ML (maximum likelihood)
estimate of the adaptation by taking into account the information of prior means of the
model. By the nature of MAP computation, in the speech model only the portions
associated with the adaptation samples get updated, for which case VFS scheme came
into the play as a supplement to MAP by extending the coverage of adaptation in the
model space. The MAP-VFS adaptation in general offers more satisfaction in
recognition performance than MAP alone given the same adaptation data. MLLR
adaptation first appeared in 1995 and became the representative of
transformation-based adaptation, where linear regression was employed to derive the
transformation matrix using ML-estimate. Note that through the transformation by
matrix multiplication, the entire model space is adapted at one time despite the fact
that the sample utterances might convey very limited information for adaptation. In a
sense, MLLR adaptation provides with an overall but somewhat coarser speech model
adaptation, in contrast to MAP adaptation which brings about a local and yet specific
effects of adaptation, given the same adaptation samples.
One thing that is common to both MAP and MLLR is that the quality of
adaptation depends on the amount and adequacy of the adaptation samples: the more
the samples, the better the adaptation quality which in turn determines the recognition
performance. When the adaptation utterances from a new speaker are insufficient, the
effects of either MAP or MLLR adaptation would be questionable: the recognition
rate of which would fall below the baseline, i.e., worse than no adaptation at all as
shown by the author’s experiments [8, 9].
Eigenvoice-based adaptation [10-20] is a relatively young member in the speaker
speaker-clustering-based adaptation where a speaker dependent (SD) speech model is
established for every member in a group of speakers, from which feature vectors
called as eigenvoices are extracted through PCA for building the eigenvoice speech
model. The adaptation to the speech model (an eigenvoice vector space) then can be
undertaken when adaptation data is available, as shown in Fig. 1.4.
. . . . . . . . . . . . . . PCA .. . ML Estimate . . . Adaptation Data . . . S pe ak er 1 S pe ak er N Speaker Adapted Model SD models SA model unused weights 11 11 12 12 13 13 1 N N1 2 N N2 3 N N3 1 2 3
To summarize, speaker adaptation is a process that turn speaker-independent (SI)
speech models into speaker-adapted (SA) ones, as is clearly seen in Fig. 1.5.
SI models speech recognition system
SI models
speech recognition system
SA models shipping
from manufacturer to end user
adaptation data from end users
adaptation process
Fig. 1.5. Speaker adaptation scheme.
To ensure the quality of the adaptation at the scarcity of adaptation samples, the
author proposes a general framework for enhancing MAP, VFS and MLLR adaptation,
and the resultant implementations are named as FCMAP, FLC-VFS and FLC-MLLR
respectively where FLC stands for fuzzy logic control, indicating the underlying fuzzy
mechanism incorporated in the general system architecture.
1.3 Audio Event Detection
Conventional security, surveillance or remote homecare systems rely heavily, if
not exclusively, on the visual information (i.e. data captured by video camera) for
detecting specific events in considerations [21-24] through the use of motion tracking-
analysis techniques. The similar development is also seen in the field of multimedia
retrieval and indexing applications, where video information is the major concern and
detecting certain specific shot in a video sequence [25-27]. Depending solely on
visual data as the basis for capturing status/situation development in the context
inevitably would be confronted by the limitations inherent in the image acquiring
process:
Video camera is an oriented-sighting device and views lying beyond the camera’s visual angle are therefore “unseen”.
When the scene is in the darkness or over exposure, activities taking place wherein would become “unseen”.
The scenario like two gangsters threatening of killing each other right in front of the video camera, both with smiling on the faces, is in fact “unaware of” through
“clearly seen”.
Note that in all these circumstances, acoustic data can act as a complementary source
of information for reflecting the auditory aspect of the reality in the context. A further
thought in that almost all living creatures that move around in their habitats are
equipped with organs for both visual and aural perception would remind us that any
security, surveillance or remote homecare system dismissing the use of audio
information is effectively a crippled one. And in fact species that can “hear” much
better that they can “see” are more than one would have expected; scotopic animals,
oceanic mammals and, of course, the moles are only a small group of examples of all.
As a result, audio event detection has been getting a lot more attentions in recent years,
and fundamental issues include
(1) Categorization of various kinds of sounds that are to be encountered in daily life,
of which the sources may be
artificial: gun shots [28], door opening/closing and glass breaking [29].
human activities: coughing [30], voices under different emotions [31], crying, talking, walking and running [32], female screaming to be addressed in this
dissertation (Chap. 7).
nature: wildlife activities [33] and ordinary or catastrophic phenomena [34]. Note that the entities of the categorization are not limited to the above three and in
each category good and interesting subjects to be explored are virtually unlimited;
“detecting a tiny mouse blowing wind one mile away”, for instance, borrowing from the dialog in an old movie in the early 80’s “Blue Thunder” is just one if the
author is allowed.
(2) Internal representation and modeling of a designated type of sound, in order to be
differentiated from other sounds and the background acoustics as were done in [32]
and [28], where multi-level or hierarchical tree are utilized for more elaborated
audio representation of several human activities and different types of gunshots,
respectively.
(3) Representation and modeling of the background acoustics against which the
compasison can be done for audio event detection, as was done in [35] for
background noise analysis, and in [36] for online adaptation in background
modeling where the idea of acoustic background modeling is translated from a
precedent counterpart in video background modeling [37].
A typical audio event detection process starts with receiving a stream of audio
frames coming in the system at regular time intervals, on which analysis is to be
performed every time a fixed number of frames are collected (or equivalently an
elapse of a pre-determined time span called decision window, DW) so as to decide if
the designated audio event has occurred or not. The author proposes a variable-length
decision window of which the window length is governed by a fuzzy mechanism for
eliminating the deficiency suffered by the fixed-length DW approaches, as to be
detailed in Chap. 7.
automatic speech recognition based on hidden Markov models for Mandarin is given,
together with the mathematic backgrounds for the two speaker adaptation techniques
in popular use: MAP-VFS composite and MLLR. Also described in Chap. 2 is audio
event detection based on Gaussian mixture models. In Chap. 3, a general framework
of fuzzy logic control is described, where the problem formulation by fuzzification,
the establishment of fuzzy rule base and inference mechanism, and the defuzzification
for final quantitative outputs are provided.
The main theme of this dissertation concerns the enhancement of extant speaker
adaptation schemes by additional tuning according to the availability of adaptation
data and of audio event detection by scanning the audio stream with a variable-sized
decision window, both being govern by a general fuzzy mechanism; the formulation
and implementations of which are explained respectively in chapters 4, 5, 6 and 7.
Chapter 2
Overview on Speech Recognition and Audio
Event Detection
In the realm of man-machine interactions, audio processing no doubt receives far
less attention than it deserves when compared to the resources/efforts invested in its
counterpart of video processing. It has been so for over decades despite the fact that
for thousands of years in human history instant and precise communications among
individuals were mostly realized via the auditory channels: speak and listen (imagine
the age before the creation of characters in ancient civilization).
Though the ability to understand what others are talking about is indispensable in
social interactions, the auditory perceptual skill of differentiating one kind of sound
from others that may be heard in one’s living surroundings is far more important and
crucial; for instance, being able to tell other’s “HELLO” from the noises due to a
vehicle’s hard break, a gunshot from an explosion, a duck’s quack from a goose’s
honk and the Spanish from the Italian without really understanding both languages etc.
could be live-saving or at least useful or even amusing in one’s daily life.
Paradoxically enough, the development in audio process evolved in the opposite order:
speech recognition was addressed far ahead of audio event detection which was not
until recent years did it become visible on the stage.
Before the analysis on the audio information could commence, a pre-processing
on the input audio signals is generally required for extracting acoustic features in
preparation of any particular application under consideration, and in the case of this
several major steps in the front-end processing is briefly explained as follows [38,
39]:
Analog to digital conversion (A/D conversion)
Pre-emphasis Feature extraction
Framing processing Speech signals input Hamming windowing Feature vector output
Fig. 2.1. The front-end processing procedure in preparation of subsequent audio
analysis.
(1) A/D conversion:
The analog input data is converted into digital forms by sampling and A/D
conversion.
(2) Pre-emphasis:
Components in the high-frequency band are enhanced.
(3) Framing:
Samples of audio data are divided into frames, each consisting of a
pre-determined and same number of samples.
(4) Hamming windowing:
(5) Feature extraction:
From each frame, various parameters are extracted and a feature vector
representing acoustic characteristics of the audio input in the associated time
period is thus derived.
For the purpose of speech recognition and human voice related application, linear
predictive coefficient (LPC) parameters, LPC cepstrum (LPCC) parameters and mel
frequency cepstral coefficient (MFCC) parameters are the three most frequently seen
in practice, and are employed in the author’s research.
In this chapter, theoretical backgrounds for two fundamental technical issues in
speech recognition, namely HMM speech modeling and speaker adaptation, will be
given; also given in the final are certain primary issues pertaining to audio event
detection.
2.1 HMM Speech Modeling
The modeling of speech patterns can be implemented in the form of neural
networks (NN, [40-42]), by using support vector machine (SVM, [43, 44]) or by using
hidden Markov models (HMM) which to the author’s knowledge is by far the most
popular and widely used one.
2.1.1 HMM and Mandarin Syllable Modeling
HMM is basically a stochastic process operating on an underlying Markov chain
of a finite number of states and the same number of random functions: at any given
instance of time, the process stays at a certain state and the random function
associated with the current state determines what the next state will be. Such issues as
how an HMM is to be cast into a model for certain specific applications and how the
probability transition matrix is used to describe the probability of going from one state
to the other states, which in effect defines the Markov chain at work. The applications
of HMM to speech recognition can be found in many references. [48-51] are some of
the examples. The work by C. H. Lin et al. [50] is particularly note worthy, where a
framework for the recognition of syllables was established and later became a widely
accepted standard in the modeling of Mandarin syllables with tones. According to
which each Mandarin syllable consists of an initial part and a final ending part, each
being called as a sub-syllable. The HMM modeling of Mandarin syllables assumes
that the initial part is right dependent on the beginning phone of the following final
part and the final part is context independent. A Mandarin utterance may contain one
to several syllables; the HMM of an utterance thus includes HMMs of the constituent
syllables. In the actual implementation of the author’s work, the HMM of a syllable
consists of an HMM of 3 states for the initial part and an HMM of 6 states for the
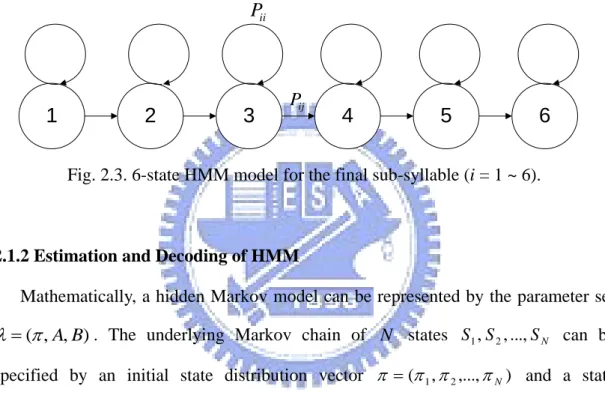
final part, and in total there are 440 states for all Mandarin sub-syllables. The HMM
modeling of the initial sub-syllable in 3 states and the final sub-syllable in 6 states are
respectively depicted in Fig. 2.2 and Fig. 2.3, where each circle represents a state and
ij
P represents the probability density function concerning the transition from state i to
state j. The HMM model employed in the author’s research is referred to as
left-to-right model since only left-to-right transitions are allowed; i.e. the transition
from each state is limited to only two alternatives: either moving toward the
1
2
3
11 P 12 P 22 P 23 P 33 PFig. 2.2. 3-state HMM model for the initial sub-syllable.
5
4
1
2
3
6
ii P ij PFig. 2.3. 6-state HMM model for the final sub-syllable (i = 1 ~ 6).
2.1.2 Estimation and Decoding of HMM
Mathematically, a hidden Markov model can be represented by the parameter set
) , , ( A B
. The underlying Markov chain of N states S1,S2,...,SN can be
specified by an initial state distribution vector (1,2,...,N) and a state
transition probability matrix A
aij |1i,jN
, in which i is the probability of iS at time t 0 and a is the state transition probability of going from state ij Si
to state S . Moreover, if the observations composed of j M discrete symbols
M o o
o1, 2,..., are considered, the finite set of probability distributions
b q j N q M
B j( )|1 ,1 with bj(q) being the probability of observing o q
given the state S , represents the random processes associated with the states. j
number of observation symbols M also should be taken into account besides
specifying the parameters , A and B.
In order to acquire an efficient estimation of HMM model during the training
phase and an optimal decoding procedure of the estimated HMM model during the
recognition phase, three problems need to be taken care of [51]:
(1) If the observation sequence O
o1,o2,...,oT
is given, how the probability) | (O
p is to be evaluated then?
(2) If an HMM model and an observation sequence are known, how the optimal (the
most likely) state sequence in the model that produces the observation is to be
decide?
(3) If a model and a set of observations are given, how the model parameter set
) , , ( A B
to maximize p(O|) is to be estimated?
For the first problem, some methods such as the forward recursive algorithm and
backward recursive algorithm have been proven to be efficient [52]. For the third
problem, the Baum-Welch method [45-47] is proposed to offer a local maximum
solution although the computation for an explicit solution of the model is difficult.
For the second problem, the Viterbi algorithm proposed in [53] has been proven to
be an effective one for acquiring an optimal state sequence. The score function t(i)
is defined as in Eq. (2-1), given the observation sequence O
o1,o2,...,oT
) | ,..., , , ,..., , ( max ) ( 1 2 1 2 ,..., ,2 1 t i T s s s t i P s s s S o o o t , (2-1)
where t(i) has the largest probability at time t and at state Si.
) (
1 i
t
is computed as follows using t(i) by induction,
) ( ] ) ( max [ ) ( 1 1 t ij j t i t j i a b o . (2-2) This iterative procedure is essentially a dynamic programming and the state sequence
that has the maximum likelihood of generating the given observation sequence will be
searched if one keep track of all the states which maximize Eq. (2-1). An array t( j)
is used to store the predecessor state of the state j at t . The steps of the Viterbi
algorithm are as follows
(1) Initialization , 1 ), ( ) ( 1 1 i ibi o iN (2-3) , 1 , 0 ) ( 1 j j N (2-4) (2) Recursion , 1 ), ( ] ) ( [ max ) ( 1 1 i a b o j N j t ij j t N i t (2-5) , 1 ], ) ( [ arg ) ( 1 1 N j a i j t ij N i t (2-6) (3) End )], ( [ max 1 * i p T N i (2-7) )], ( [ arg 1 * i s T N i T (2-8) (4) Back-tracing 1 ,..., 2 , 1 ), ( *1 * t T T s st t t . (2-9) During the recursive step of this algorithm, the optimal sequence of states is obtained
eventually.
2.2 Speaker Adaptation
Automatic speech recognition systems generally can be classified either as
speaker-independent type (SI) or speaker-dependent type (SD), depending on how
speech samples are colleted during system construction. An SI system typically
collects speech samples from an as large population of speakers as possible, whereas a
speaker. In general, a well-trained SD model achieves better performance than an SI
model on recognizing the speech of a specific speaker. However, when the amount of
training data available to acquire the SD model is not sufficient, such superiority
would no longer exist. This is where speaker-adaptive techniques (SA), sometimes
referred to as model-based adaptation techniques, get in to play, which would adapt a
full SI model into an SD one and achieves SD-like performance, requiring only a
small fraction of the speaker-specific training data. When a new speaker uses such an
adaptive system, the parameters of the HMMs are updated by speech data obtained
from this speaker. By speaker adaptation, the recognition performance can be
significantly improved for outlier speakers such as non-native speakers or others not
well represented in the SI training set.
Generally speaking, the operation for speaker adaptation can be carried out in
either supervised mode or in unsupervised mode respectively, depending on if the
transcription of the speaker-specific adaptation data has been known or not before
performing the adaptation procedure [54]; the speaker adaptation is said to operate in
batch mode if all adaptation data acquired from a new speaker is fed into the system
before the final adapted system is produced and then put to work, or incremental
mode if the adaptation data is continually fed for adaptation while the system is
already at work [54].
Currently there mainly three categories of speaker adaptation techniques:
(1) Maximum a posteriori (MAP) adaptation, representative of Bayesian-based
adaptation.
(2) Maximum likelihood linear regression (MLLR) adaptation, representative of
transformation-based adaptation.
(3) Eigenvoice adaptation.
are the most commonly used techniques for speaker adaptation, and practically are
still seen working in almost all speech recognition systems nowadays. The
schemes of the three speaker adaptation will be described in the following
subsections.
2.2.1 Bayesian-based Adaptation
In early 90s, Lee, Lin and Juang reported speaker adaptation for an HMM with
parameters of continuous density (CDHMM) [55], in which the parameter estimation
was accomplished by segmental k-means algorithm which was developed in their
earlier researches for HMM parameter estimation/training [56, 57]. In these works,
speaker adaptation of CDHMM parameters is formulated as a Bayesian learning
procedure, where prior information were involved in the computation of Bayes
theorem P(|O) where is the model parameters and O is the sequence of observations. On this basis, Gauvain and Lee then released in 94 the MAP adaptation
by maximum a posteriori estimate of the HMM parameters [58]. MAP adaptation is
thus Bayesian-based and offers a framework of incorporating newly acquired
speaker-specific data into the existing models.
Assume that the CDHMM parameters are characterized by the parameter vector
wik ik ik
, ,
, where wik, ik and ik are the mixture gain, mean vector and
covariance matrix of the k-th mixture component from the i-th state, respectively. The
parameter vector is a random vector. A prior knowledge about the random vector is available and characterized by a prior probability density function p() where is to be determined as the input sequence is observed. Let Y (y1,...,yT) be a given set of T observations. The MAP estimate for is defined as
)]. | ( [ max arg p Y MAP (2-10)
Then the MAP estimate for is obtained by solving . 0 ) ,..., , | ( 1 2 T y y y p (2-11) By using Bayes theorem,
. ) , . . . , , ( ) ( ) | , . . . , , ( ) , . . . , , | ( ) | ( 2 1 2 1 2 1 T T T y y y p p y y y p y y y p Y p (2-12)
Then Eq. (2-10) can be rewritten as follows:
a r gm a x[ ( |) () ] .
p Y p
M A P (2-13)
To accomplish the estimation of the model parameter vector , the well-established segmental k-means algorithm can be used, and the execution is done in an iterative
process as follows:
(1) Obtain the optimal state segmentation of a given observation sequence Y, based on
a given model, i.e.,
) ( ) | , ( max arg ˆ P Y s P s s , (2-14) where s(s0,s1,...,st,...,sT)is a state sequence.
(2) Based on the optimal state sequence sˆ , find the MAP estimate
a r gm a x ( ,ˆ|) ()
P Y s P
. (2-15) (3) Iterates from (1) until some predefined equilibrium is reached.
Assume that the mean is random with a prior distribution P0() and the variance 2 is known and fixed, then the conjugate prior [59, 60] for is also a Gaussian distribution with mean and variance ~2, as already shown in [61]. And if the conjugate prior for the mean is substituted into Eq. (2-13), the MAP estimate for the adapted parameter as derived in [61] would appear as a weighted average of the prior mean and the mean of the adaptation observation data yk:
ˆ 2 ~2~2 2 2 ~2 k k k k k N y N N , (2-16)
where Nk is the total number of training samples observed for the corresponding
recognition unit with the k-th Gaussian and yk is the sample mean with the k-th
Gaussian.
Let 2/~2 and the prior mean be replaced by the mean parameter of the initial model with the k-th Gaussian, k, Eq. (2-16) could be reformed as
k k k k k k N y N N ˆ , (2-17) where is a parameter which gives the bias between the maximum likelihood estimate of the mean from the data and the prior mean. That is, is a prior density parameter that controls the balance between the prior knowledge and the adaptation
data.
Note that, however, the data available for adaptation is often quite limited and
most likely could cover a small portion of speech patterns in HMMs, which implies
that many HMM parameters will not be adjusted by the nature of Bayesian-based
adaptation. As a result, vector field smoothing (VFS) was proposed as a supplement
for broadening the extent of adaptation in the HMM parameter vector space [62-65].
The rationale behind VFS adaptation is that, by exploiting the spatial coherence of
vector distributions in HMM, the unadapted HMM parameter vector might be
“purposely” adjusted in accordance with the MAP adapted vectors nearby.
To be specific, consider an unadjusted parameter vector j and k of MAP adapted vectors ˆk’s with initial counterparts k’s lying in the vicinity of j in the
HMM vector space. The amount of MAP adaptation to k is referred to as the
transfer vector k,
k k
k
ˆ . (2-18) Given the adapted vectors around, how much adaptation to j should be
expected? A weighted average of k’s as shown in Eq. (2-19) would be a quite natural choice. j j N k k j j N k k k j j
) ( , ) ( , ~ , f djk k j , , exp , (2-19) where ~ is the estimate of the untrained mean vector with the j-th Gaussian j j;) ( j
N indicates the set of K-nearest neighbor mean vectors, k’s, to j; k
j,
represents the weighting coefficient determined by the distance dj,k
between j and k, and
f denotes the weight control parameter.
A typical VFS adaptation thus comprises three steps:
(1) transfer vectors calculation for all MAP adapted parameter vectors by Eq. (2-18),
(2) interpolation of transfer vectors for adapting the unadjusted vector by Eq. (2-19),
(3) smoothing.
The composite of MAP-VFS adaptation has been proven to be more robust than
MAP adaptation in recognition performance when given the same limited amount of
adaptation data. Still there are rooms for MAP-VFS enhancement when the quality of
MAP adaptation is in question, which is an issue to be addressed in Chap. 5.
2.2.2 Transformation-based Adaptation
In the transformation-based model adaptation, certain appropriate transformations
have to be derived from a set of adaptation utterances acquired from a new speaker
cepstral bias for model adaptation is the simplest form of transformation, which is
easy to estimate and perform, as was done in [66]. Usually, adding a bias alone could
not take care of the variations in test environments or among different speakers. An
affine transformation (linear transformation) over HMM parameters in general offers
a more appropriate model and there have been numerous adaptation schemes using
affine transformations. In the work by Leggetter et al. [67], MLLR adaptation was
firstly proposed under the framework of affine transformation, which has become
quite popular and successful for its rapid adaptation. However, it is necessary to have
sufficient adaptation data to ensure the estimate of the MLLR transformation, and
various solutions have been suggested for further reinforcement. For instance, instead
of using the maximum likelihood (ML) estimate in the MLLR scheme, the maximum
a posteriori estimate is used to estimate the transformation parameters by maximizing
the posterior density [68, 69]. In addition, it is suggested in [70, 71] that a prior
distribution for calculating the mean transformation matrix parameters is used, which
is generally dubbed as the MAPLR technique. Besides using the estimate of MAP
style for acquiring transformation parameters, an alternative using a variant of the
Expectation-Maximization (E-M) algorithm [72] to optimize a discounted likelihood
criterion, the so-called discounted likelihood estimation, was proposed in [73].
Theoretical formulations of classic transformation-based adaptation schemes, MLLR
and MAPLR, are briefly described as follows.
Under the framework of the transformation-based speaker adaptation, it generally
starts with a set of SI HMMs, to which certain transformation F with
parameters derived from adaptation data, Y, of a new speaker is to be applied such that the transformed model F() would recognize the incoming speech better than
usually assumed to be fixed and then be estimated via statistical measures under
specific criteria such as ML or MAP, as were done in [67] and [70] respectively.
MLLR makes use of the simplicity of ML criterion, which states that the
transformed model ˆML should maximize the likelihood of the adaptation data
) , | (Y p , i.e. ˆ a r gm a x ( | ,) p Y ML . (2-20)
Consider the Gaussian mean vector of the model at state s, s, and the associated
affine transformation action as follows
, ˆs As s bs
(2-21) which sometimes is written as
, ˆs Ws s
(2-22) and s is the extended mean vector in the form
, ]' , , , [ 1 sn s s (2-23) where is the offset term of the regression, usually being set as 1.
The transformation matrix Ws is to be estimated such that the likelihood of the
adaptation data is maximized, for which a closed form solution is available in [67] by
solving the following equation,
, ) ( ) ( 1 1 ' 1 1 1 ' 1
T t R r s s s s s T t R r s t s sr t r o r r t rW r r (2-24) where (t) r s is the total occupation probability for the state s at time r t given the
observation vectors of adaptation data ot at time t;
1
sr is the covariance matrix of the output probability distribution, and
R is the number of states.
Apart from MLLR, Chesta et al. [70] suggests that the prior density can be taken
maximum a posteriori criterion: ), , | ( max arg ˆMAP p Y (2-25)
which is proportional to argmax ( |, ) ().
p Y p According to this criterion, the
maximum a posterior linear regression (MAPLR) technique for adaptation is thus
derived, where the transformation matrix Ws appears in the form of p(p1) linear equations as follows [70]
, 1 1 1 2 1 2 1 ) ( ) , ( 2 1 2 1 ) , ( , 1 1 1 1 1 1 1 1 1 1 1 1
p j p i m m r t o m n r m n w p k p l N n M m lj kl ik jl kl ki j ik T t k t N n M m lj ik jl ki j l ik T t t p k p l kl (2-26) where wkl Ws, ik Rnm, mij M, ij, ij ; ) , (n m t is the probability of the mixture m in state n at time t, given the observation o(t), and
i
is the i component of the mean vectorth nm.
Note that Rnm is the precision matrix and M , and are hyperparameter
matrices associated with the prior density. Solving the system of equations in Eq.
(2-26) for Ws is obviously much more time-consuming than standard MLLR due to
the use of additional hyperparameters
M,,
of the prior distribution. Details for the estimation of
M,,
can be found in [74].A fuzzy control mechanism reinforced MLLR, called FLC-MLLR, will be
presented in this dissertation to perform at a much lower computing cost than
MAPLR and still be able to ensure the quality of MLLR adaptation when
2.2.3 Speaker-clustering-based Adaptation
The basic idea of the speaker-clustering-based adaptation is that a number of
speaker clusters can be built up in advance, and the model of the current speaker is
then represented as an interpolated form of the weighted sum of the speaker clusters.
Such a speaker-clustering-based adaptation is also called as speaker-space-based
adaptation. Mathematically, the estimated parameters of the sets of cluster models
form the axes of speaker spaces and by estimating an appropriate point for the speaker
in the speaker space, the mean vectors for the speaker is then determined. The
eigenvoice approach can be regarded as the generalization of speaker-clustering
adaptation techniques.
R. Kuhn, et al. [10] firstly proposed the eigenvoice adaptation where a priori
knowledge concerning the variations among all training speakers was represented as
the set of SD model parameters in the form of eigenvectors named eigenvoices; a new
speaker model was then expressed as the linear combination of the set of eigenvoices.
By the eigenvoice approach, the number of parameters required to be estimated would
be reduced greatly but still capable of retaining the overall system characteristics to
capture the variance between speakers.
Typically, the eigenvoice approach needs to take care of two things, namely
eigenvoice construction and coefficient estimation. In the eigenvoice construction
phase, referring to Fig. 1.4, a set of N well-trained SD models must be established
first. Then, the model parameters of each SD model are “vectorized”, forming a set of
N “supervectors”. Space dimension reduction techniques, such as principal
components analysis (PCA), are then applied to the set of N supervectors to obtain N
eigenvectors with dimension D, also called as “eigenvoices”. In general, only the first
K eigenvoices are kept which are significant as they possess most information from
Finally, by these K eigenvoices, an accurate speaker space “K-space” will be spanned
and acquired. In the coefficient estimation phase, adaptation is then performed using
the maximum likelihood eigen-decomposition (MLED) algorithm proposed in [10],
which estimates a set of weights to find a weighted combination of eigenvoices.
Following the eigenvoice representation, the eigenvoice-versioned MLLR and
MAPLR adaptation have been reported in [11] and [12] respectively where effective
hybrids of MLLR-/MAPLR-eigenvoice adaptation are conceived. For the time being,
the eigenvoice-based approach has received intensive attentions and various
extensions of eigenvoice adaptation have been developed [13-20].
2.3 Audio Event Detection
The audio event detection system is designed for picking up a designated acoustic
phenomenon when it appears in a certain acoustic background, and consequently the
operations basically involve the comparison of the input audio signals against two
acoustic models (the singular and the normal) and the decision about whether an
audio event has occurred or not. Fig. 2.4 shows the architecture of a typical audio
event detection system associated with two sound models where the input audio
stream is segmented into the frame sequence, from which acoustic features are to be
extracted for estimating the likelihood scores of both the normal and the singular
situation via the classifier operation. When collecting the likelihood estimates to the
Feature Extraction
Likelihood scores for the normal class Frame 1
Likelihood scores for the singular class
Feature Extraction
Likelihood scores for the normal class Frame 2
Likelihood scores for the singular class
Feature Extraction
Likelihood scores for the normal class Frame n
Likelihood scores for the singular class
Input audio frames
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Classification by information collected within the decision window (DW) Singular event happening?GMM classifiers (Event models)
Pre-established database for the normal class
Database for the singular class DW: covering n feature vectors
Fig. 2.4. Audio event detection system.
For constructing such a system as in Fig. 2.4, several issues have to be resolved. acoustic features to be extracted:
LPC, LPCC and MFCC, for example, are good candidates to be considered. acoustic/sound models:
In what kind of representations and how the model parameters are to be
determined are the primary concerns. For the representation, alternatives like GMM
[75], HMM [76] or Bayesian network [77] are available. GMM is in relatively
density distributions [78]; GMM is also frequently seen employed in the field of
speaker identification for its capacity in categorizing voice patterns. the criteria for decision making:
How the likelihood estimates are to be calculated and accumulated, how
frequently the decision should be made, and the possibility of making decision not
at regular time intervals but being situation driven are all interesting subjects to be
explored.
2.3.1 GMM Models and Classifiers
In this dissertation, GMM models are adopted in the development of an audio
event detection system for female screaming in the contexts of office space, parking
lot and living room. The setting up of models during the training phase and the
operation of the GMM classifier during the recognition phase are described in the
following.
2.3.1.1 GMMs Establishment
Mathematically, a GMM is a weighted sum of M Gaussians, denoted as
wi, i,i
, i1,2,...,M , 1 1
M i i w , (2-27) where wi is the weight, i is the mean and i is the covariance.To determine the GMM model parameters for a certain sound class, the E-M
algorithm as suggested in [72] is readily applicable. It is noted that before running the
E-M algorithm, a crucial job is to initialize the model first, i.e., to assign starting
values to the parameters, which can be realized by a binary splitting vector
quantization algorithm [79]. With the initial model parameter settings, the E-M
adjusting the initial model parameters; specifically, the expectation and the
maximization steps in the E-M process are repeated so that the parameter set
wi, i,i
, i1,2,...,M
of the GMM converges to an equilibrium state. The
E-M algorithm implemented in the system to establish a GMM model, given a set of
acoustic feature vectors {xn |n1,2,...,N}, is detailed below:
(1) initialization is performed by a binary splitting vector quantization algorithm [79]; i is in diagonal form for computational consideration; M is determined by the Bayesian Information Criterion as suggested in [80].
(2) The computation for GMM parameters is, as suggested by the name E-M,
basically an iterative process through which GMM parameters are progressively
updated for maximizing the expectation value of the acoustic data.
REPEAT {Expectation computation:
M k n k k n i i n x b w x b w x i f 1 ) ( ) ( ) , | ( , (2-28) where ) ( ) ( ) ( 2 1 exp ) 2 ( 1 ) ( 1/2 1 2 / s n s T s n s D n i x x x b . (2-29)-update for f() maximization:
1 ( | , ) 1