國
立
交
通
大
學
電機學院 電機與控制學程
碩
士
論
文
無橋式功因校正昇壓型整流器
之無電流感測控制
Current Sensorless Control for
Bridgeless PFC Boost Rectifier
研 究 生:鍾肇強
指 導 教 授:陳 鴻 祺 博士
無橋式功因校正昇壓型整流器
之無電流感測控制
Current Sensorless Control for Bridgeless PFC Boost Rectifier
研 究 生:鍾肇強 Student:Chao-Chiang Chung
指導教授:陳鴻祺 Advisor:Hung-Chi Chen
國 立 交 通 大 學
電機學院 電機與控制學程
碩 士 論 文
A ThesisSubmitted to College of Electrical and Computer Engineering National Chiao Tung University
in partial Fulfillment of the Requirements for the Degree of
Master of Science in
Electrical and Control Engineering July 2012
.
Hsinchu, Taiwan, Republic of China
無橋式功因校正昇壓型整流器
之無電流感測控制
學生:鍾肇強
指導教授:陳鴻祺
博士
國 立 交 通 大 學 電 機 學 院 電 機 與 控 制 學 程 碩 士 班
摘 要
本篇論文是採用無橋式功率校正昇壓型整流器,實現無電流感測迴路架構。在控制 方法上,不同於傳統多迴路電流感測控制必須偵測輸入電壓、輸出電壓以及電感電流, 本論文提出一只感測輸入電壓及輸出電壓的控制,在不迴授輸入電流下,可以不用考慮 電流取樣及偵測,減少控制架構的複雜度,並利用演算的方式控制輸入電流使其達到功 因校正且在直流鏈亦能維持一穩定直流的電壓,並仍能達到國際間對電流諧波的所設立 的規範。 無電流感測控制架構控制的目的為控制電感電流為弦波函數,達到輸入電流為弦波 且同相,且當輸入電壓高達 400Hz,依然可以達到功率因素校正的效果。Current Sensorless Control for Bridgeless PFC Boost Rectifier
Student:Chao-Chiang Chung Advisor:Hung-Chi Chen
Degree Program of Electrical and Computer Engineering
National Chiao Tung University
Abstract
The conventional multi-loop control senses the input voltage, the output voltage and the inductor current, in order to yield in-phase sinusoidal current and regulate the output voltage. In this paper, the current sensorless control for bridgeless PFC boost rectifier is proposed where only the input voltage and the output voltage are sensed. The current sensorless control has one voltage loop, which simplies the control structure, and reduce the number of sensors.
In this thesis, the input current waveform are analyzed and the circuit behavior is modeled with consideration of both the inductor resistance and the switch conduction voltage. From the simulation and experiment results, the measured sinusoidal current is in-phase with the input voltage evenwhen the line frequency is high to 400 Hz.
誌 謝
本論文得以順利完成首先感謝我的指導教授陳鴻棋老師,在撰寫本論文中,經常給 予我方向和細心的指導,讓我能夠順利的進行研究和論文的修改,在此對老師獻上由衷 的感謝。再者,感謝口試委員胡竹生博士和廖益宏博士給我論文提出寶貴的意見,使論 文更加的完整。 在專班研究所修課及實驗時,每當來實驗室做實驗時都是戰戰兢兢,但實驗室裡的氣氛 相當的融洽與和諧,讓我的緊張的心情得到了紓緩,感謝學姊如璇,同學任浩、暐舜等, 給我於修課上面問題得以討論和解答:也感謝學弟宏和、威諭、振宇、智豪、文仁等等, 在實驗上面的方向指導和幫助。再者,感謝我專班生活認識的同學和朋友,總是給予熱 情得鼓勵和打氣。 最後感謝家人的支持,不論我做任何決定都給予鼓勵,並讓我專班研究所的生活可 以無後顧之憂的完成學業。目錄
摘 要 ... I Abstract ... II 誌 謝 ... III 第一章 緒論 ... 1 1.1 研究動機 ... 1 1.2 諧波電流 ... 2 1.3 諧波規範 ... 3 1.4 本文架構 ... 5 第二章 無橋式 PFC 電路 ... 6 2.1 無橋式 PFC 電路介紹 ... 6 2.2 無橋式 PFC 的工作原理及特點 ... 7 2.3 傳統昇壓型 PFC 和無橋式 PFC 效率簡析 ... 8 2.4 無橋式 PFC 電路的變化型 ... 10 第三章 無橋式 PFC 之無電流感測控制模型 ... 11 3.1 電路模型假設 ... 11 3.2 開關訊號產生方式 ... 12 3.3 電路推導 ... 13 3.3.1 輸入電壓正半週期時(sign(vs)>0) ... 13 3.3.2 輸入電壓負半週期時(sign(vs)<0) ... 14 3.3.3 等效模型 ... 15 3.4 無電流感測控制架構 ... 16 3.5 無橋式 PFC 電路之無電流感測控制推導 ... 18 3.6 無電流感測控制的實現 ... 19 第四章 模擬驗證 ... 20 4.1 模擬電路及元件參數 ... 21 4.2 無電流感測控制之模擬 ... 22 4.2.1 穩態模擬 ... 234.2.2 暫態模擬 ... 34
第五章 電路實作 ... 36
5.1 現場可規劃邏輯陣列 ... 36
5.2 實作電路組成 ... 38
5.2.1 數位類比轉換電路(A/D Circuit & D/A Circuit) ... 40
5.2.2 開關驅動電路(Gate Driving Circuit) ... 41
5.3 控制器合成... 42 5.4 無電流感測之實作 ... 43 5.4.1 頻率 60Hz 輸入電壓下之穩態實作 ... 44 5.4.2 頻率 400Hz 輸入電壓下之穩態實作 ... 46 5.4.3 頻率 60Hz 輸入電壓下之暫態實作 ... 48 5.4.4 頻率 400Hz 輸入電壓下之暫態實作 ... 49 5.5 諧波規範比較 ... 50 5.6 實驗改善方向 ... 57 第六章 結論 ... 58 參考文獻 ... 59
圖目錄
圖 1.1 傳統橋式整流的轉換器和帶有 PFC 的變換器比較 ... 1 (a)傳統橋式整流的轉換器 (b)帶有 PFC 的轉換器 ... 1 圖 1.2 電流失真 ... 2 圖 2.1 PFC 電路圖 ... 7 (a)傳統昇壓型 PFC 電路圖 (b) 無橋式 PFC 電路圖 ... 7 (c)全橋式 PFC 電路圖 (d) Totem-Pole PFC 電路圖 ... 7 圖 2.2 無橋式 PFC 電路動作狀態 ... 8 (a)輸入電壓正半週期 (b)輸入電壓負半週期 ... 8 圖 2.3 正半週期內二種電路架構之電流路徑 ... 9 (a)傳統昇壓型 PFC (b)無橋式 PFC ... 9 圖 2.4 增加二個二極體之無橋式 PFC 電路 ... 10 圖 3.1 無橋式 PFC 主要電路及控制方塊圖 ... 11 圖 3.2 開關訊號邏輯圖 ... 12 圖 3.3 輸入電壓為正半週期時電路示意圖 ... 13(a)PWM 訊號 d(t)為 High (b) PWM 訊號 d(t)為 Low ... 13
圖 3.4 輸入電壓為負半週期時電路示意圖 ... 14
(a)PWM 訊號 d(t)為 High (b) PWM 訊號 d(t)為 Low ... 14
圖 3.5 等效電路圖... 15 圖 3.6 無電流感測控制電路方塊圖 ... 16 圖 3.7 控制迴路參考波型 ... 17 圖 4.1 PSIM 功能模組概要圖 ... 20 圖 4.2 PSIM 內無橋式 PFC 無電流感測電路模擬圖 ... 22 圖 4.3 60Hz 輸入電壓下穩態響應及控制器內部訊號 ... 24 圖 4.4 400Hz 輸入電壓下穩態響應及控制器內部訊號 ... 25 圖 4.5 200W 輸出 60Hz 模擬輸入電壓及輸入電流波形 ... 26 圖 4.6 400W 輸出 60Hz 模擬輸入電壓及輸入電流波形 ... 26 圖 4.7 600W 輸出 60Hz 模擬輸入電壓及輸入電流波形 ... 26
圖 4.8 200W 輸出 400Hz 模擬輸入電壓及輸入電流波形... 30 圖 4.9 400W 輸出 400Hz 模擬輸入電壓及輸入電流波形... 30 圖 4.10 600W 輸出 400Hz 模擬輸入電壓及輸入電流波形 ... 30 圖 4.11 60Hz 模擬輸入電壓下暫態響應 ... 34 圖 4.12 400Hz 模擬輸入電壓下暫態響應 ... 35 圖 5.1 FPGA 元件基本結構 ... 37 圖 5.2 實作電路組成架構圖 ... 38 圖 5.3 實作電路照片 ... 39 圖 5.4 A/D 轉換電路 ... 40 圖 5.5 D/A 轉換電路 ... 41 圖 5.6 開關驅動電路 ... 41 圖 5.7 無電流感測控制模組時序圖 ... 42 圖 5.8 200W 輸出 60Hz 實作輸入電壓及電流波形 ... 45 圖 5.9 400W 輸出 60Hz 實作輸入電壓及電流波形 ... 45 圖 5.10 600W 輸出 60Hz 實作輸入電壓及電流波形 ... 45 圖 5.11 200W 輸出 400Hz 實作輸入電壓及電流波形 ... 47 圖 5.12 400W 輸出 400Hz 實作輸入電壓及電流波形 ... 47 圖 5.13 600W 輸出 400Hz 實作輸入電壓及電流波形 ... 47 圖 5.14 60Hz 實作輸入電壓及電流之暫態響應 ... 48 圖 5.15 400Hz 實作輸入電壓及電流之暫態響應 ... 49
表目錄
表 1.1 諧波規範 IEC 61000-3-2 之各種設備之分類... 4 表 1.2 IEC 61000-3-2 之諧波電流規範 ... 4 表 1.3 DO-160 諧波電流限制 ... 5 表 2.1 二種 PFC 電路的電流路徑表... 9 表 3.1 開關訊號真值表 ... 12 表 4.1 無電流感測模擬參數 ... 21 表 4.2 200W 輸出 60Hz 模擬輸入電流諧波規範 ... 27 表 4.3 400W 輸出 60Hz 模擬輸入電流諧波規範 ... 28 表 4.4 600W 輸出 60Hz 模擬輸入電流諧波規範 ... 29 表 5.1 各種架構下之 FPGA 使用率 ... 43 表 5.2 60Hz 實作輸入電壓下各次諧波及其 THDi ... 44 表 5.3 400Hz 實作輸入電壓下各次諧波及其 THDi ... 46 表 5.4 200W 輸出 60Hz 實作輸入電流與諧波規範 ... 51 表 5.5 400W 輸出 60Hz 實作輸入電流與諧波規範 ... 52 表 5.6 600W 輸出 60Hz 實作輸入電流與諧波規範 ... 53 表 5.7 200W 輸出 400Hz 實作輸入電流與諧波規範 ... 54 表 5.8 400W 輸出 400Hz 實作輸入電流與諧波規範 ... 55 表 5.9 600W 輸出 400Hz 實作輸入電流與諧波規範 ... 56第一章
緒論
1.1 研究動機
隨著科技的進步,各類電器從電網汲取的電能越來越多,且國際組織對於電 力品質的要求越來越嚴格,功率因數校正(Power Factor Correction, PFC),已成為電 力電子產業中的重點。圖 1.1 分別繪出了傳統橋式整流和使用 PFC 電路的電流輸 入波形,在圖 1.1(a)中,僅使用大電容濾波,將輸入電壓頻率 50/60Hz 的交流電壓 濾波成直流電壓再給後級直流/直流變換器使用,此種方式的輸入電流是非正弦 的,隱含的諧波含量甚大。而帶有功率因數校正的開關電源,如圖 1.1(b),其輸入 電流和輸入電壓波形相同,並且相位一致。這樣就可減少從電源中取得的無效功 率降低,減少輸送電能的損失,更加有效的使用電能。 DC/DC 控制器 + -EMI 濾波器 橋式整流 DC/DC變換器 dDC/DC VO DC/DC 控制器 + -EMI 濾波器 橋式整流 DC/DC變換器 dDC/DC PFC 控制器 dPFC PFC變換器 電容電壓 輸入電壓 輸入電流 PFC電容電壓 輸入電流 輸入電壓 VO 圖 1.1 傳統橋式整流的轉換器和帶有 PFC 的變換器比較 (a)傳統橋式整流的轉換器 (b)帶有 PFC 的轉換器
1.2 諧波電流
在上一小節中,描述了一理想電壓源加至一非線性負載,如圖 1.1(a)中之 橋式整流電路等等,其輸入電流則不再是弦波,而電流的失真將帶有諧波的 成分,同時也會造成公用點(PCC)線電壓的失真,由於電壓的失真通常都很 小,故為了簡化分析,假設輸入電壓vs =VSPsin( )
ωt 為無失真之理想輸入電 壓,其中 VSP為理想輸入電壓之峰值,如下圖 1.2 所示。 vs is is1 idis ωt ψ1 圖 1.2 電流失真 輸入電流is( )
t 可以由下式表示,其中is1( )
t 表示輸入電流之基本波,ish( )
t 表示 輸入電流之第 h 次諧波。idis為基本波以外之電流成分。 i( )
t i( )
t i( )
t is( )
t idis( )
t h sh s s = + ∑ = + ∞ =2 1 1 (1.1) 由於輸入電流is( )
t 為週期性波形,故可進一步採傅立葉級數展開為:( )
=(
−)
+ ∑∞(
−)
=2 1 1 1 1 sin sin h shp h p s s t I t I h t i ω φ ω φ (1.2) 其中φ1為輸入電壓和輸入電流基本波之相位差,φh則為輸入電壓與輸入電流 各次諧波之相位差。Is1p及Ishp分別代表輸入電流之基本波峰值及諧波峰值大小。 因此定義另一項用來計量一波形之非弦波性質之名詞,亦即總電流諧波失真。總 電流諧波失真為所有非基本波頻率有效值總和與基本波頻率有效值之比值: % 100% 2 , 1 2 2 , × ∑ = ∞ = rms s h shrms i I I THD (1.3) 上式亦可改寫為:% 2 100% , 1 2 , 2 × − = rms s rms sh rms i I I I THD (1.4)
1.3 諧波規範
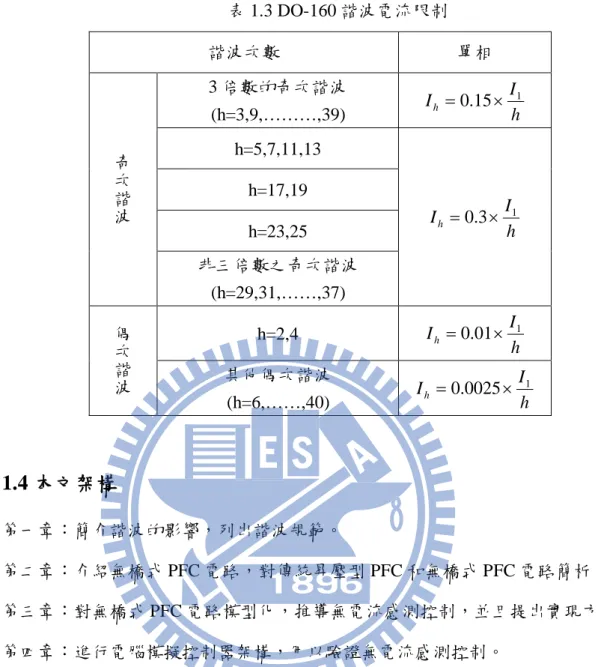
根據前述的討論我們可以知道,電力系統中之電流諧波對整個系統的影 響非常巨大,因此許多國家及國際組織皆定有類似的諧波規範。例如 IEC 61000-3-2、IEEE 519 等。 以 IEC 61000-3-2 而言,此規範的使用範圍為,當一設備之單相輸入電流 小於 16 安培時,則均符合 IEC 61000-3-2 之諧波規範。其中 IEC 61000-3-2 又 將各種設備作 A 至 D 之分類。其分類之定義如下表所示,接著根據表 1.1 中 之分類可以得到表 1.2 之各類諧波之限制值。 A 類的規範為單純定義各諧波之大小限制,B 類則為 A 類各諧波限制值 之 1.5 倍。C 類的各諧波限制值定義為基本波頻率下之電流的百分比,其中λ 代表線路之功率因數。對於 D 類,各次諧波電流之限制是依據額定功率來決 定的,輸入電流的各次諧波應不超過 D 類表推算出來之值。 然而對於高頻率航空用的諧波限制更是嚴苛,如 DO-160D 其諧波限制比 起 IEC 61000-3-2 標準更加嚴峻,當輸入 400Hz 時,需要比 50/60Hz 更大的頻 寬來控制來達到相同的電流諧波失真,表 1.3 列出了 DO-160 的諧波限制範圍。表 1.1 諧波規範 IEC 61000-3-2 之各種設備之分類 A 類 平衡之三相系統 家用設備,不包含 D 類中之設備 白幟燈調光器 音響設備 工具,但不包含手持工具 任何不為 B 類、C 類、D 類中之設備 B 類 手持工具 非專業之焊接設備 C 類 照明設備 D 類 個人電腦及螢幕 電視接受器 註:此類設備瓦數限制範圍為,大於 75 瓦特但不超過 600 瓦特 表 1.2 IEC 61000-3-2 之諧波電流規範 諧波次數 A 類 (安培) B 類 (安培) C 類 (% is1) D 類 (mA/W) 奇次諧波 3 2.30 3.45 30×λ 3.4 5 1.14 1.71 10 1.9 7 0.77 1.155 7 1.0 9 0.40 0.60 5 0.5 11 0.33 0.495 3 0.35 13 0.21 0.315 3 0.296 15≦n≦39 0.15× n 15 0.225× n 15 3 n 3.85 偶次諧波 2 1.08 1.62 2 4 0.43 0.645 6 0.30 0.45 8≦n≦40 0.23× n 8 0.345× n 8
表 1.3 DO-160 諧波電流限制 諧波次數 單相 奇次諧波 3 倍數的奇次諧波 (h=3,9,………,39) h I Ih =0.15× 1 h=5,7,11,13 h I Ih =0.3× 1 h=17,19 h=23,25 非三倍數之奇次諧波 (h=29,31,……,37) 偶次諧波 h=2,4 h I Ih =0.01× 1 其他偶次諧波 (h=6,……,40) h I Ih =0.0025× 1
1.4 本文架構
第一章:簡介諧波的影響,列出諧波規範。 第二章:介紹無橋式 PFC 電路,對傳統昇壓型 PFC 和無橋式 PFC 電路簡析。 第三章:對無橋式 PFC 電路模型化,推導無電流感測控制,並且提出實現方法。 第四章:進行電腦模擬控制器架構,用以驗證無電流感測控制。 第五章:介紹實作電路組成並實作驗證。 第六章:總結本論文之研究成果以及主要貢獻。第二章
無橋式 PFC 電路
2.1 無橋式 PFC 電路介紹
在功因校正(PFC)電路中最常使用的就是昇壓型切換式整流器(Boost-type switching-mode rectifiers,後稱之為傳統昇壓型 PFC 電路),如圖 2.1(a),該架構簡 單控制方便,為一橋式整流器加上一昇壓型轉換器而成,且此種電路架構的 PFC 改善方式已經相當成熟,但由於傳統昇壓型 PFC 的前端的橋式整流器導通損失較 為嚴重,導致此種架構的效率受到一定程度的影響。但隨著半導體技術不斷的發 展,具有低導通電阻的 MOSFET 等開關元件,及幾乎無反相回復特性的二極體, 大幅度降低了 PFC 電路開關元件的損耗。但整流器造成的損耗卻一直無法得到根 本的抑制,為了降低整流器所帶來的導通損耗,而電源工程師提出了一些不需要 輸入整流器的新電路架構。在這些新的電路架構中,一種稱之為無橋式 PFC(Bridgeless PFC)電路架構,如圖 2.1(b),為無橋式 PFC 電路由於此架構也相當 簡單、開關電路驅動方便,省略了輸入的橋式整流器,比起傳統昇壓型 PFC 電路, 效率可提高一些,若在大功率應用下效果更加明顯。 而無橋式 PFC 電路中本是全橋式 PFC 電路衍生出來,如圖 2.1(c),全橋式 PFC 電路架構是由四個開關元件來代替橋式整流器的功能,並加以適當的開關驅 動訊號來控制開關的導通與截止以實現功率因數校正的功能,但四個開關的驅動 電路成本較高,控制電路也很複雜。而由全橋式 PFC 衍生出其他的電路架構,如 圖 2.1(d)的 Totem-Pole PFC 架構,這些電路架構均屬廣義的無橋式 PFC 的範圍, 此二種電路的區別僅僅是開關元件取代整流器或二極體和開關元件擺放的位置不 同,從驅動電路上來無橋式 PFC 的二個開關元件的源極均接在同一點,驅動電路 較為簡單。而 Totem-Pole PFC 電路架構中的開關元件,因擺放在同一臂中的上下 橋,則需要隔離驅動:從控制上來說無橋式 PFC 的二個開關元件可以同步控制,
閘極驅動信號是一樣的,由輸入電壓的極性來選擇某個開關元件動作。而 Totem-Pole 的驅動也比無橋式 PFC 要複雜許多,另工作中的 Totem-Pole PFC 電路 會遇到開關元件本身二極體(Body Diode)反相恢復的問題,而無橋式 PFC 電路中的 二極體僅實現續流的功用,就不存在此種困擾。 D1 D2 D3 D4 LB vs TA CB RL VO + − + − D2 D1 D2 LB vs CB TA RL VO + − + DA DB TB − (a) (b) LB vs CB TA-RL VO + − + DA- DB-TB- − DB+ DA+ TA+ TB+ LB vs CB TA-RL VO + − + DA- DB-− DB+ DA+ TA+ (c) (d) 圖 2.1 PFC 電路圖 (a)傳統昇壓型 PFC 電路圖 (b) 無橋式 PFC 電路圖 (c)全橋式 PFC 電路圖 (d) Totem-Pole PFC 電路圖
2.2 無橋式 PFC 的工作原理及特點
無橋式 PFC 電路的工作流程如傳統的昇壓型 PFC 電路類似,其工作狀態依照 輸入電壓的方向可以分為二個階段。第一階段如圖 2.2(a)所示當輸入電壓為正半週 期,D1和 TA動作如同昇壓型轉換器(Boost-Type Converter)般,當 TA導通時流過電 感 L 的電流增加(電流方向如圖所示),流過 TA本身及 TB的本體二極體(Body Diode),此時電感電流增加電感儲能。當 TA截止時電感電流通過 D1向電容儲能及負載提供能量,電流再透過 TB的本體二極體續流,電感電流減少。第二階段如圖 2.2(b)所示,當輸入電壓轉為負半週期時,改由 TB和 D2工作也如昇壓型轉換器, 而電流透過 TA的本體二極體續流。二個階段交替出現,所以無橋式 PFC 的電感電 流方向是周期性變換的,不像圖 2.1(a)中傳統昇壓型 PFC 的電感電流感測是單相性 的,比起一般 PFC 控制所需的電感電流檢測較為困難。 D1 D2 LB vs C B TA RL VO + − + DA DB TB − vs D1 D2 LB vs C B TA RL VO + − + DA DB TB − vs 圖 2.2 無橋式 PFC 電路動作狀態 (a)輸入電壓正半週期 (b)輸入電壓負半週期 由上述可知基本的無橋式 PFC 工作狀態如二個昇壓型轉換器,故有另一名稱 為 Dual Boost PFC,由於電路在輸入電壓的正負半週期內,自動切換所工作的昇壓 型轉換器,二個昇壓型轉換器的開關元件驅動電路是可同步的,所以無橋式 PFC 電路的開關元件控制方式與傳統昇壓型 PFC 差異無多,使得在設計驅動電路上較 為方便。
2.3 傳統昇壓型 PFC 和無橋式 PFC 效率簡析
本小節分析傳統昇壓型 PFC 和無橋式 PFC 電路的效率參數,闡述了無橋式 PFC 架構在效率上的優勢。首先須做幾點假設: 1. 不考慮輸入端 EMI 濾波器引起的損失。 2. 只對基本電路架構進行效率分析,不包含控制電路和驅動電路的損失。 3. 假設傳統昇壓型 PFC 和無橋式 PFC 的電感損耗相當。 而因輸入的電壓有周期對稱性,損耗分析僅對半個週期計算。假設圖 2.3(a)為輸入電壓為正半週期,圖中標示出了此半週期內的電流方向,由此分析二種電 路架構在導通損耗上的區別。而根據圖 2.3(b)所示之電流路徑,損失分析可歸納為 下表。 D1 D2 D3 D4 LB vs TS CB RL VO + − + − DS D1 D2 LB vs C B TA RL VO + − + DA DB TB − vs vs 圖 2.3 正半週期內二種電路架構之電流路徑 (a)傳統昇壓型 PFC (b)無橋式 PFC 表 2.1 二種 PFC 電路的電流路徑表 傳統昇壓型 PFC 無橋式 PFC 整流二極體 2 個/D1+D4 無 PFC 昇壓二極體 1 個/DS 1 個/D1 處於開關狀態的開關元件 1 個/TS 1 個/TA 處於續流的開關元件 無 1 個/DB 開關導通時電流全路徑 D1+TS+D4 TA+DB 開關截止時電流全路徑 D1+DS+D4 D1+DB 由表 2.1 可知,從電流流通的路徑上來看無橋式 PFC 電路,每個時段都比傳 統昇壓型 PFC 電路少一個造成導通損失的元件。圖 2.3(a)中的 LB、TS、DS可看成 一個昇壓型轉換器。同理圖 2.3(b)中的 LB、TA、D1也組成了一個昇壓型轉換器, 其損失在理論上是一樣的。但無橋式 PFC 電路相對於傳統昇壓型 PFC 電路效率的 提昇就在續流的開關元件和後者整流器二極體的造成的損失差別。
2.4 無橋式 PFC 電路的變化型
在上小節中,得知了無橋式 PFC 比起傳統昇壓型 PFC 導通損失上雖較為降 低,在效率上稍作提昇,但也有其缺點,在參考文獻[4]中有說明,和傳統昇壓型 PFC 電路相較,其 EMI 中的共模干擾有顯著的影響,觀察圖 2.1(a)傳統昇壓型 PFC 的電路架構,電路在工作時無論任何時間下,其電流都有透過橋式整流器將輸入 電源和輸出電壓的負端相連接;反觀圖 2.1(b) 無橋式 PFC 所示,僅僅在輸入電壓 正半週期時,電流有透過開關元件 TB之本體二極體將輸入電源和輸出電壓的負端 相連,但在輸入電壓為負半週期時則沒有,而輸出電壓的負端和輸入電源間猶如 加上一個振幅相當為輸出電壓的高頻脈衝訊號,這高頻的電壓脈衝訊號透過輸入 電源和輸出電壓的負端之間的寄生電容充電和放電,造成令人堪憂的共模干擾。 而為了減少此一缺點,在電路中將原先的電感拆成二個感值相等的電感,並增加 了二個二極體 D3和 D4,如圖 2.4,使之更像二個直流/直流昇壓型切換式轉換器電 路(Boost-Type Converter),在輸入電壓為正半週期時,電流透過 D4將輸入電源與 輸出電壓之負端相連接;同理,在輸入電壓負半週期時,電流透過 D3將輸入電源 的與輸出電壓之正端相連接,來減少二端寄生電容造成的共模干擾。雖然增加了 二個二極體但導通損失如同圖 2.3(b)未加二極體的無橋式 PFC 電路相當,減少了 EMI 影響對電路的影響,而本篇文章將以此電路作為主電路架構。 D1 D2 LB1 vs C B TA RL VO + − + DA DB TB − LB2 D3 D4 圖 2.4 增加二個二極體之無橋式 PFC 電路第三章
無橋式 PFC 之無電流感測控制模型
本章將先對無橋式 PFC 電路做分析,如圖 3.1 所示,輸入電源正負端透過電 感後連接上臂皆為二極體,下臂則為 IGBT 背接二極體所構成之無橋式 PFC 電路, 下臂透過高頻開關的切換,使輸出電壓 VO能夠穩定為一固定電壓值,並且使輸入 電流 is維持弦波,並與輸入電壓同相為此電路的主要目的。在此圖中可以看見僅 有二個電壓感測器,並不存在電流感測器,而詳細控制的方法,在後面章節加以 推導,以達成無電流感測控制。 Current Sensorless Control VO* GA GB D1 D2 LB1 vs C B TA RL VO + − + DA DB TB − LB2 D3 D4 圖 3.1 無橋式 PFC 主要電路及控制方塊圖3.1 電路模型假設
(i) 假設開關之切換頻率 fs相當高,遠高於輸入電壓 vs之頻率,也就是在開關在 切換週期 TS內可視為一定值。 (ii) 因電路中任何情況下皆有二個半導體元件導通,在此先假設之二極體及開關 之導通壓降平均為 VFT。 (iii) 電路中二電感等效為一理想電感 L 加上電感本身之等效串連電阻 rL。 (iv) 在輸出之直流系統上,忽略輸出電壓之漣波值。因此在電路穩態響應中,直 流輸出電壓 VO等於輸出電壓命令值VO*(
VO ≈VO*)
。3.2 開關訊號產生方式
在 2.2 小節中,我們已經介紹了無橋式 PFC 電路開關動作、電流方向,然後 再寫下各個開關導通時所形成的各種狀態之數學式,再利用狀態平均法推出一個 可以表示系統的通式,首先依照輸入電壓的正負週期、開關是否導通動作,寫出 四種狀態,再對此四種狀態做推導並設計控制器。其開關分配的方式可參照表 3.1 及圖 3.2。 其中先導入一 sign(x)函數,為符號運算元。{
1, 0 0 , 1 ) ( = − when x≥< x when x sign (3.1) 表 3.1 開關訊號真值表 sign(vs) d(t) GA GB 對應等效電路圖 1 H On Off 圖 3.3(a) 1 L Off Off 圖 3.3(b) -1 H Off On 圖 3.4(a) --1 L Off Off 圖 3.4(b) d(t) sign(vs) GA GB 圖 3.2 開關訊號邏輯圖 需要的開關訊號邏輯方程式如下:( )
t d v sign GA = ( s)⋅ (3.2)( ) ( )
v d t sign GB = s ⋅ (3.3)3.3 電路推導
3.3.1 輸入電壓正半週期時(sign(vs)>0)
於輸入電壓正半週期時(sign(vs)>0),且 PWM 訊號 d(t)為 High 時,GA為 High,
而 GB為 Low,其等效電路如圖 3.3(a)所示,且定義輸入電源正端流出之電流為正 及電感極性(如圖標示),此時輸入電流和定義方向相同流過電感 L、開關元件 TA, 再透過二極體 D4形成一封閉迴路,此時對電感儲能,在此狀態下電感電流的斜率 為正,此時輸入電流 is上升,可寫出下式: Fd FS s L s L v r i V V v = − − - (3.4) 當 PWM 訊號為 Low 時,GA和 GB皆為 Low,其等效電路如圖 3.3(b)所示,進 入此狀態時,電路瞬間加入了一定電壓源 VO,電路形成一交流電壓源、一電感及 一直流電壓源串聯,而輸出的直流端電壓峰值大於交流電壓峰值,此時電感電流 的斜率為負,此時輸入電流 is下降,可寫出下式: * O Fd s L s L v r i 2V V v = − − − (3.5) D1 D2 LB vs CB TA RL VO + − + DA DB TB − LB D3 D4 vs is is>0 vL r L rL (a) D1 D2 L vs C B TA RL VO + − + DA DB TB − L D3 D4 vs is is>0 vL rL rL (b) 圖 3.3 輸入電壓為正半週期時電路示意圖 (a)PWM 訊號 d(t)為 High (b) PWM 訊號 d(t)為 Low
3.3.2 輸入電壓負半週期時(sign(vs)<0)
於輸入電壓負半週期時(sign(vs)<0),且 PWM 訊號 d(t)為 High 時,GB為 High,
而 GA為 Low,其等效電路如圖 3.4(a)所示,輸入電流由輸入電壓負端流出,也形 成一封閉迴路,在此狀態下電感電流的斜率為負,此時輸入電流 is下降,可寫出 下式: FS Fd s L s L v r i V V v = − + + (3.6) 當 PWM 訊號為 Low 時,GA和 GB皆為 Low,其等效電路如圖 3.4(b)所示,進 入此狀態時,圖中可以看到此時輸出電壓兩端交叉接到電感端以及輸入電壓交流 端,因輸出的直流電壓峰值大於交流電壓峰值,此時電感電流的斜率為正,此時 輸入電流 is將上昇,可寫出下式: * 2 Fd O s L s L v r i V V v = − − − (3.7) D1 D2 L vs C B TA RL VO + − + DA DB TB − L D3 D4 vs is is>0 vL rL rL (a) D1 D2 L vs C B TA RL VO + − + DA DB TB − L D3 D4 vs is is>0 vL rL rL (b) 圖 3.4 輸入電壓為負半週期時電路示意圖 (a)PWM 訊號 d(t)為 High (b) PWM 訊號 d(t)為 Low
3.3.3 等效模型 式 3.1 至 3.4 中之(VFS+VFD)或 2VF,我們在 3.1 小節第(ii)項中,將所有半導體 元件的導通壓降平均為 VFT以簡化,再將式中 PWM 訊號同為 High 的狀態合併, 觀察方程式(3.4)、(3.6)中,僅剩 VFT的符號不同,因此加入符號運算子 sign(vs)後可 以合併為通式(3.8):
( )
s FT L s s L v signv V r i v = − − (3.8) 同理可將 PWM 訊號同為 Low 的狀態合併,方程式(3.5)、(3.7)加入符號運算子 sign(vs) 後可以合併為通式(3.9):( )
( )
* O s s L FT s s L v sign v V r i sign v V v = − − − (3.9) 式(3.8)、(3.9)即為狀態的通式,經過等效電路模型化可見圖 3.5 所示。 L rL sign(vs)VFT sign(vs)VO* vs d(t)=Low d(t)=High 圖 3.5 等效電路圖 根據等效電路,引入狀態平均法的觀念,當責任週期 d(t)為 High 的時候,系 統狀態為式(3.8),當 d(t)為 Low 時,系統狀態為式(3.9),若我們設定一個開關週期 長度為 TS,而在此時間內 d(t)為 High 的時間為d TS,反之 d(t)為 Low 的時間為( )
1−d TS,則我們可利用平均狀態法將(3.8)、(3.9)乘上對應時間, 並將式(3.9)之 vL標示為v′ 以示和式(3.8)區別,得下式所示: L(
)
[
vL×dTS +vL′ ×1−dTS]
/TS (3.10) =>vL =vs −sign( )
vs VFT −rLis −( )
1−d sign( )
vs VO*其中d 及
( )
1−d 為 0 到 1 之間的純量與變數 d(t)不同,經由狀態平均法後之電 感電壓vL亦加以上標以表示平均一開關週期內電感電壓,式(3.10)為此架構最終的 狀態方程式。3.4 無電流感測控制架構
下圖 3.6 為本論文所提及之無橋式 PFC 電路無電流感測器控制方塊圖,此方 塊圖為一閉迴路系統,僅回授二個訊號,一為輸入電壓 vs,一為輸出電壓 VO。輸 出二項訊號,各為輸入電壓符號函數 sign(vs)以及開關導通訊號 d(t),此二項訊號 將做為開關分配及各導通時間的依據。 1/VO* Σ Σ VFT Σ VoltageControl Σ Looking Up Table VO* VO rL /ωL ZCP Detector ABS sign(.) vS sign(vS ) vtri vcont + + + + + -1 0 CLK L V - d(t) + S1 S2 + -圖 3.6 無電流感測控制電路方塊-圖 回授輸出電壓 VO與命令電壓V 相減取得誤差訊號,再經過電壓控制器計算出O* 估測電感電壓峰值VˆL。另一方面回授輸入電壓 vs經過零交越點偵測電路,如圖 3.7 所示,若是 ZCP 訊號打入,則系統內的時間軸立刻校正,此時間軸經過三角函數 表,分別產生 s1、s2訊號,其中s1 =sign(vs)cos( )
ωt 、s2 = cos( )
ωt ,此訊號各自帶有正弦、餘弦函數,將產出 s2乘以 L rL
開關元件的導通電壓補償,輸入電壓經過絕對值運算扣掉上述總和,再除以直流 側的命令電壓 * O V 得到控制電壓 vcont。 t ω t ω t ω ) ( t vs ω 0 0 0 t ω 0 t ω 0 ZCP CLK s2(ωt) s1(ωt) 圖 3.7 控制迴路參考波型 將 vcont置於比較器之負端,將以固定三角波 vtri放置於正端,一般來說開關的 頻率取決於此三角波的頻率,在現有的 IGBT 開關元件實現當中均可高達數十 kHz。當控制訊號 vcont小於三角波 vtri時,d(t)輸出為 1;反之當控制訊號波形 vcont
大於或等於三角波型 vtri時,d(t)輸出為 0,也如式(3.11)表示。 ≥ < = cont tri tri cont v v when v v when t d 0 , , 1 ) ( (3.11) 因此可以得到無橋式 PFC 電路在無電流感測控制下,平均責任週期d 與控制 週期所產生控制信號 vcont之間的關係式: + − − − = − = ωL r S S V V v V 1 1 v 1 d * s FT L 1 2 L O cont (3.12)
3.5 無橋式 PFC 電路之無電流感測控制推導
依據前章 2.3 節所推導之無橋式 PFC 電路系統個狀態所得到之通式為:( )
( )
( )
* 1 s O s L FT s s L v signv V r i d sign v V v = − − − − (3.13) 並將(3.12)式代入式(3.13)中可得( )
− − − = s s FT L s L v signv V r i v( ) ( )
( )
( )
* * 1 O s L s L FT s O V v sign ωt sin ωL r ωt cos v sign V V v V + − − ( )
sin( )
ωt ωL r V ωt cos V i r L L L s L + + − = (3.14) 為了使輸入電流為弦波且同步於輸入電壓,我們希望電感電壓及電感電流為 下(3.15)、(3.16)式:( )
ωt cos V vL = L (3.15)( )
ωt sin ωL V iL L = (3.16) 根據我們需要的電感電壓及電感電流,假設(3.15)和(3.16)式,若是將此二式中 任一式代入(3.14)式均可得到另外一式,合乎所設定假設,因此設計控制信號為:( )
( ) ( )
( )
+ − − = = − sinωt ωL r ωt cos v sign V V v V v d s FT L s L O cont * 1 1 (3.17) 在式(3.17)中sin( )
ωt 項為式(3.14)式所產生,即希望的輸入電流,在設計的假設裡, 輸入電流的相位必須與輸入電壓 vs同相,故sign(vs)sin( )
ωt 可改寫為 sin( )
ωt 。為了方便後續的實現,我們將控制命令分為兩個部分,控制命令 S1、S2,此二 訊號的相位必須與輸入電壓角度相同,將此二式代入則可將(3.15)式改寫為:
( )
+ − − = = − ωL r S S V V v V 1 v d 1 * s FT L 1 2 L O cont (3.18) 依據此推導之結果,設計控制訊號,實現方塊圖、模擬、實作均依照此推導基礎來建立。
3.6 無電流感測控制的實現
此控制法運作方式如 3.4 節詳述,本節將針對實現此控制法必須注意之事項逐 一說明: 1. 控制信號必須注意 s1、s2訊號必須經過鎖相使之與輸入電壓 vs角度相同,才符 合前小節推導過程,若沒有對準相位則很難控制輸入電壓及輸入電流達到預設 的要求。 2. s2必須乘上 L rL ω ,用以補償電感的內阻,其中ω為輸入電壓的角頻率,rL為電感 之內阻、L 電感值均可由 LCR 計量測,寫入模擬或實作參數中,若輸入電壓頻 率固定,則此值為一常數值。 3. 在做輸入電壓 vs、輸出電壓 VO取樣時,通常必須先做降壓,但在圖 3.6 中產生 vcont之前必須乘上 * O V 1 ,因此降壓的比例換算以及在控制器內數位轉換必須要精 準,否則難以使輸出電壓追上命令電壓。第四章
模擬驗證
在此利用來模擬的軟體為 PSIM,這套軟體廣泛的使用在電力電子領域的研究 中。由於其簡單的操作介面,以及模擬快速的特性,使得使用者更利於在繁複的 驗證中更快速的取得需要的資訊。 另外 PSIM 廣受電力電子領域研究所使用的原因,莫過於其內部的馬達驅動零 件庫相當豐富,以及很強的控制系統模擬能力,在頻率響應的分析方便,另外它 可以和 C/C++程式做連結也是其中一個相當重要的原因。以下簡單介紹 PSIM 這套 軟體。 在 PSIM 中有提供五種功能模組供使用者使用,分別為供給馬達驅動系統使用 的馬達驅動模組、設計數位控制系統的數位控制模組、提供 Matlab/Simulink 共同 模擬的 Simulink 耦合模組、提供 MagCoupler 共同模擬的 JMAG 耦合模組及計算 功率開關熱損失與溫度變化的熱分析模組,可以利用圖 4.1 簡單描述此五種功能模 組。 圖 4.1 PSIM 功能模組概要圖 在馬達驅動模組中,由於電動機模型與控制迴路相當複雜,因此對於馬達驅 動系統設計與分析工作具有高度的挑戰性,利用 PSIM 的馬達驅動模組中的電動機 模型與負載模型可以使複雜的分析工作簡化,此外豐富的零件庫可以使馬達驅動 的模擬系統迅速的建立。在 PSIM 中馬達驅動模組包括:直流電動機、三相鼠籠式與轉子繞線式感應電動機、永磁與外激是同步電動機、無刷直流電動機、切換式 磁組電動機、定力矩、定功率及一般常用機械負載、速率與力矩感測器及換速齒 輪箱。在數位控制模組中,不同於類比控制器,數位控制器的設計上,取樣頻率 的影響、取樣延遲、量化誤差以及類比數位轉換上的誤差都必須考慮,因此利用 數位控制模組,可以確認控制器的效能跟穩定度、研究取樣頻率對於系統效能的 影響以及類比決定數位轉換器的解析度需求,對於數位控制器的設計有很大的幫 助。在 PSIM 中數位控制模組包括:零階維持、單位延遲、Z 域轉移函數方塊、數 位 FIR 與 IIR 濾波器、量化方塊、數位積分與微分控制器及環型緩衝器。 PSIM 正因為強大的計算能力以及豐富的資料庫內容,對於本論文在電路以及 控制器驗證上有很大的幫助,以下的模擬也將大量的使用 PSIM 來做各種情況的模 擬。
4.1 模擬電路及元件參數
表 4.1 無電流感測模擬參數 輸入電壓(峰值) vˆs =155(110Vrms) 輸出電壓命令 VO* =200V 負載電阻 R=200、100、66.7Ω 開關切換頻率 ftri=40kHz 輸入電壓頻率 f=60Hz、400Hz 電感 L=2.6mH 電感等效內阻 rL=0.3Ω 電容 CO=1410μF 二極體導通壓降 VF=1.4V 開關飽和電壓 Vsat=1.8V 模擬補償電壓 VFT=1.6V模擬電路圖如 4.2 圖所示,其中包含了無橋式 PFC 主電路、第三章所提及之 無電流感測控制電路、開關分配訊號以及開關飽和電壓和二極體導通壓降的補償 電路。 圖 4.2 PSIM 內無橋式 PFC 無電流感測電路模擬圖
4.2 無電流感測控制之模擬
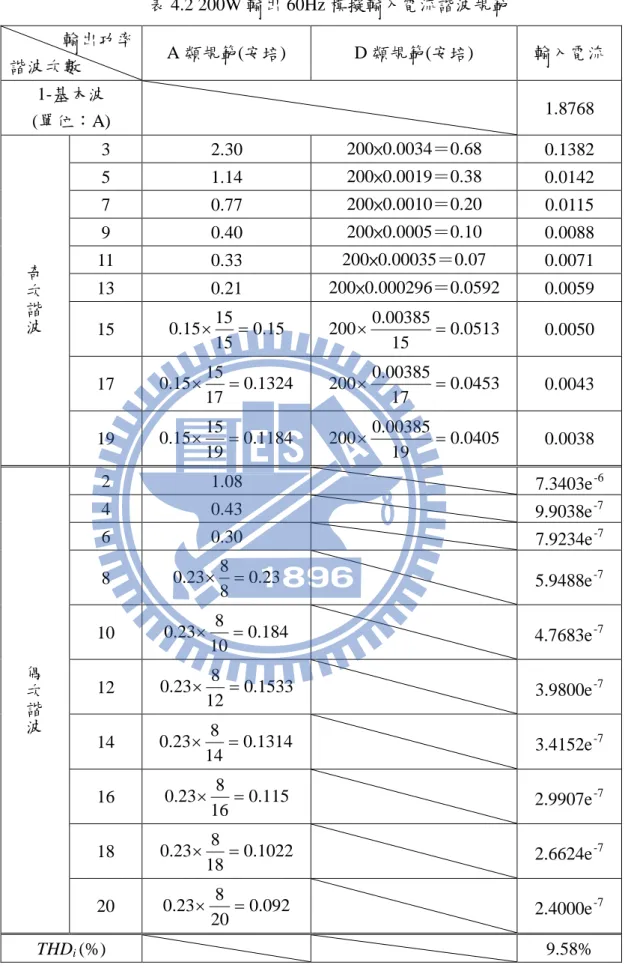
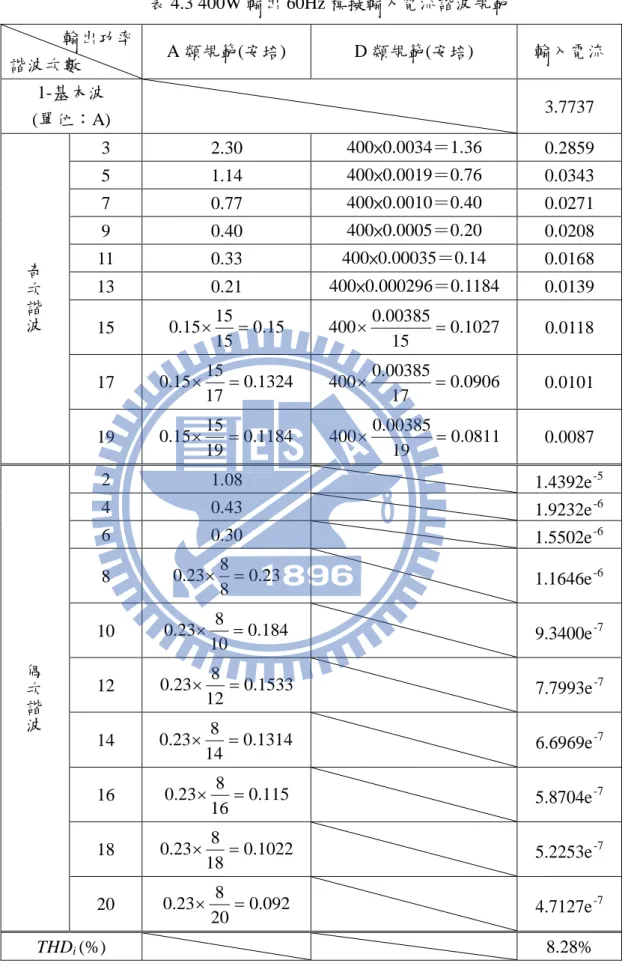
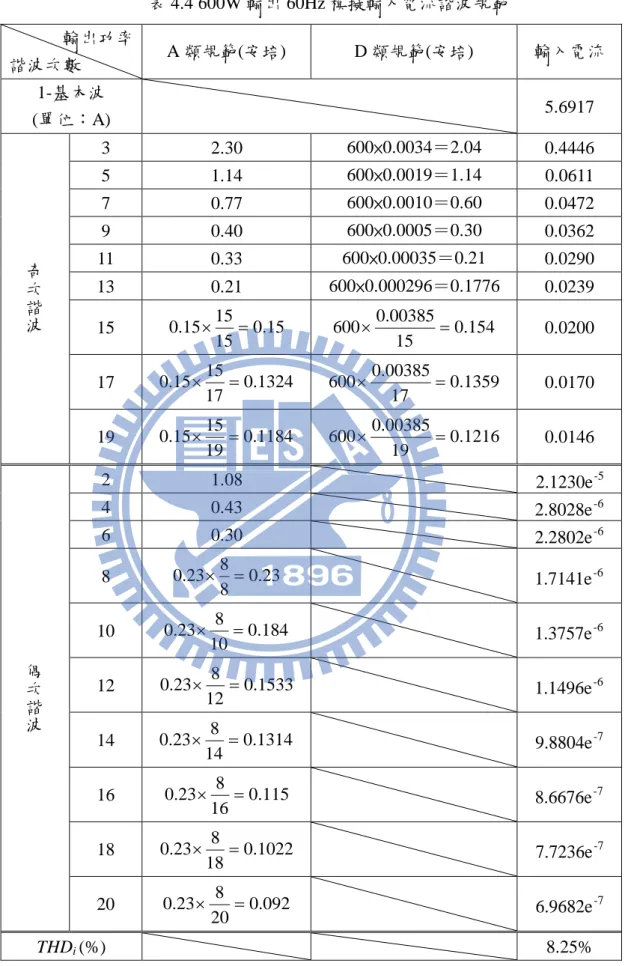
此節利用電腦模擬軟體 PSIM 來驗證無電流感測控制下,是否能在無橋式 PFC 電路達到輸入電流波形規劃和輸出電壓調節的兩種特性。分別針對在 60Hz 和 400Hz 理想輸入電壓下做不同瓦數輸出的模擬。模擬會分為二部份分別為穩態模擬 和暫態模擬,穩態模擬主要觀察其輸入電流波形是否為弦波且與輸入電壓是否同 相,並計算輸入電流諧波失真 THDi,模擬輸出功率為 200W、400W 及 600W,其 中將額定功率 PO為 400W 的控制器內部訊號繪出作為觀察。暫態模擬會將輸出功率變動為 400W 至 600W,觀察輸出電壓是否穩定於輸出電壓的參考命令 200V VO* = 。 4.2.1 穩態模擬 將表 4.1 參數代入圖 4.2 無電流感測控制模擬圖進行模擬,然後觀察其內部訊 號如VˆL、s1、s2、vcont的觀測,若能得知在相對應時間下,各訊號彼此間的關係, 對於實作電路上有一定程度的幫助,可從中發現實作電路中訊號是否正確。下圖 4.3 繪出在 60Hz 理想輸入電壓下輸出功率 400W 下控制器內部訊號的波形,圖 4.4 繪出在頻率 400Hz 理想輸入電壓下輸出功率 400W 下控制器內部訊號的波形。並 對輸出 200W、400W 及 600W 下作穩態輸入電壓及輸入電流波形之模擬,如圖 4.5 至圖 4.10,並記錄其各次輸入電流諧波,和總諧波失真率並整理成下表 4.2 至表 4.7。
圖 4.3 為輸出 400W 時,在 60Hz 理想輸入電壓下,所進行的穩態模擬,控制 輸出直流鏈電壓為 200V,可以觀察到輸入電流 is保持與輸入電壓同相位,其 8.28% THDi = ,而 s1、s2如同推導與輸入電壓時間軸同步,可依據此訊號作為實 作時的參考。 0 -5A -10A -15A 60V 120V 180V THDi=8.28% is vs VO 200V 190V 210V 5ms s1 s2 vcont 0 -0.5 -1.0 0.5 1.0 GA GB 圖 4.3 60Hz 輸入電壓下穩態響應及控制器內部訊號
同時,亦模擬將輸入電壓頻率改為 400Hz,再觀察其控制器內部訊號,仍維持 良好的正弦波形,其電流諧波失真THDi =9.37%。 200V 190V 210V VO 0 -5A -10A -15A 60V 120V 180V THDi=9.37% is vs 0 -0.5 -1.0 0.5 1.0 s1 s2 vcont 500μs GA GB 圖 4.4 400Hz 輸入電壓下穩態響應及控制器內部訊號
vs is VO 0 -5A -10A -15A 60V 120V 180V 5ms THDi=9.58% 圖 4.5 200W 輸出 60Hz 模擬輸入電壓及輸入電流波形 vs is VO 0 -5A -10A -15A 60V 120V 180V 5ms THDi=8.28% 圖 4.6 400W 輸出 60Hz 模擬輸入電壓及輸入電流波形 vs is VO 0 -5A -10A -15A 60V 120V 180V 5ms THDi=8.25% 圖 4.7 600W 輸出 60Hz 模擬輸入電壓及輸入電流波形
表 4.2 200W 輸出 60Hz 模擬輸入電流諧波規範 輸出功率 諧波次數 A 類規範(安培) D 類規範(安培) 輸入電流 1-基本波 (單位:A) 1.8768 奇次諧波 3 2.30 200×0.0034=0.68 0.1382 5 1.14 200×0.0019=0.38 0.0142 7 0.77 200×0.0010=0.20 0.0115 9 0.40 200×0.0005=0.10 0.0088 11 0.33 200×0.00035=0.07 0.0071 13 0.21 200×0.000296=0.0592 0.0059 15 0.15 15 15 0.15× = 0.0513 15 0.00385 200× = 0.0050 17 0.1324 17 15 0.15× = 0.0453 17 0.00385 200× = 0.0043 19 0.1184 19 15 0.15× = 0.0405 19 0.00385 200× = 0.0038 偶次諧波 2 1.08 -6 7.3403e 4 0.43 -7 9.9038e 6 0.30 -7 7.9234e 8 0.23 8 8 0.23× = -7 5.9488e 10 0.184 10 8 0.23× = -7 4.7683e 12 0.1533 12 8 0.23× = -7 3.9800e 14 0.1314 14 8 0.23× = -7 3.4152e 16 0.115 16 8 0.23× = -7 2.9907e 18 0.1022 18 8 0.23× = -7 2.6624e 20 0.092 20 8 0.23× = -7 2.4000e THDi (%) 9.58%
表 4.3 400W 輸出 60Hz 模擬輸入電流諧波規範 輸出功率 諧波次數 A 類規範(安培) D 類規範(安培) 輸入電流 1-基本波 (單位:A) 3.7737 奇次諧波 3 2.30 400×0.0034=1.36 0.2859 5 1.14 400×0.0019=0.76 0.0343 7 0.77 400×0.0010=0.40 0.0271 9 0.40 400×0.0005=0.20 0.0208 11 0.33 400×0.00035=0.14 0.0168 13 0.21 400×0.000296=0.1184 0.0139 15 0.15 15 15 0.15× = 0.1027 15 0.00385 400× = 0.0118 17 0.1324 17 15 0.15× = 0.0906 17 0.00385 400× = 0.0101 19 0.1184 19 15 0.15× = 0.0811 19 0.00385 400× = 0.0087 偶次諧波 2 1.08 -5 1.4392e 4 0.43 -6 1.9232e 6 0.30 -6 1.5502e 8 0.23 8 8 0.23× = -6 1.1646e 10 0.184 10 8 0.23× = -7 9.3400e 12 0.1533 12 8 0.23× = -7 7.7993e 14 0.1314 14 8 0.23× = -7 6.6969e 16 0.115 16 8 0.23× = -7 5.8704e 18 0.1022 18 8 0.23× = -7 5.2253e 20 0.092 20 8 0.23× = -7 4.7127e THDi (%) 8.28%
表 4.4 600W 輸出 60Hz 模擬輸入電流諧波規範 輸出功率 諧波次數 A 類規範(安培) D 類規範(安培) 輸入電流 1-基本波 (單位:A) 5.6917 奇次諧波 3 2.30 600×0.0034=2.04 0.4446 5 1.14 600×0.0019=1.14 0.0611 7 0.77 600×0.0010=0.60 0.0472 9 0.40 600×0.0005=0.30 0.0362 11 0.33 600×0.00035=0.21 0.0290 13 0.21 600×0.000296=0.1776 0.0239 15 0.15 15 15 0.15× = 0.154 15 0.00385 600× = 0.0200 17 0.1324 17 15 0.15× = 0.1359 17 0.00385 600× = 0.0170 19 0.1184 19 15 0.15× = 0.1216 19 0.00385 600× = 0.0146 偶次諧波 2 1.08 -5 2.1230e 4 0.43 -6 2.8028e 6 0.30 -6 2.2802e 8 0.23 8 8 0.23× = -6 1.7141e 10 0.184 10 8 0.23× = -6 1.3757e 12 0.1533 12 8 0.23× = -6 1.1496e 14 0.1314 14 8 0.23× = -7 9.8804e 16 0.115 16 8 0.23× = -7 8.6676e 18 0.1022 18 8 0.23× = -7 7.7236e 20 0.092 20 8 0.23× = -7 6.9682e THDi (%) 8.25%
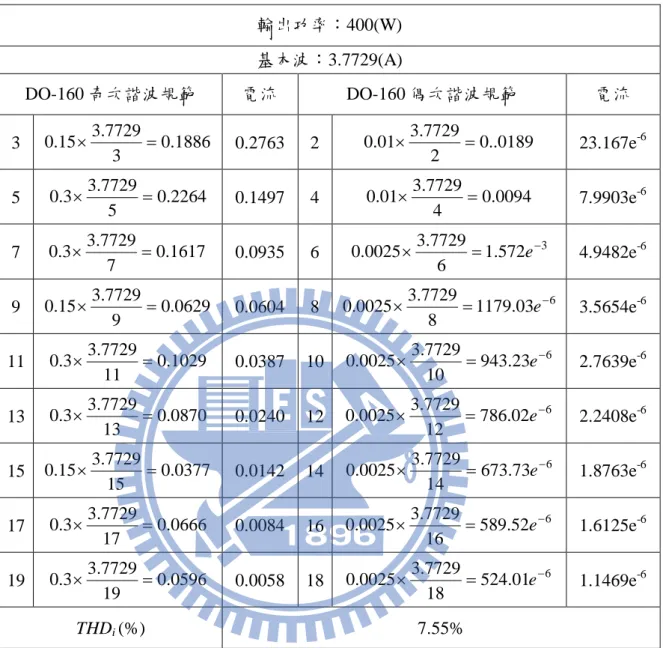
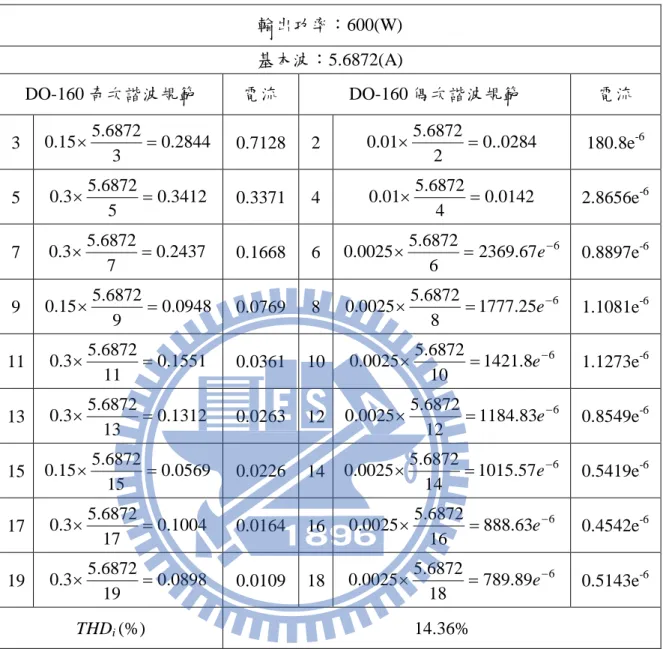
vs is VO 0 -5A -10A -15A 60V 120V 180V 500μs THDi=7.55% 圖 4.8 200W 輸出 400Hz 模擬輸入電壓及輸入電流波形 vs is VO 0 -5A -10A -15A 60V 120V 180V 500μs THDi=9.37% 圖 4.9 400W 輸出 400Hz 模擬輸入電壓及輸入電流波形 vs is VO 0 -5A -10A -15A 60V 120V 180V 500μs THDi=14.36% 圖 4.10 600W 輸出 400Hz 模擬輸入電壓及輸入電流波形
表 4.5 200W 輸出 400Hz 模擬輸入電流諧波規範 輸出功率:200(W) 基本波:1.8576(A) DO-160 奇次諧波規範 電流 DO-160 偶次諧波規範 電流 3 0.0929 3 8576 . 1 15 . 0 × = 0.0671 2 0.0093 2 8576 . 1 01 . 0 × = 23.167e-6 5 0.1115 5 8576 . 1 3 . 0 × = 0.0381 4 0.0046 4 8576 . 1 01 . 0 × = 7.9903e-6 7 0.0796 7 8576 . 1 3 . 0 × = 0.0262 6 774 6 6 8576 . 1 0025 . 0 × = e− 4.9482e-6 9 0.0309 9 8576 . 1 15 . 0 × = 0.0194 8 580.5 6 8 8576 . 1 0025 . 0 × = e− 3.5654e-6 11 0.0507 11 8576 . 1 3 . 0 × = 0.0149 10 464.4 6 10 8576 . 1 0025 . 0 × = e− 2.7639e-6 13 0.0429 13 8576 . 1 3 . 0 × = 0.0117 12 387 6 12 8576 . 1 0025 . 0 × = e− 2.2408e-6 15 0.0186 15 8576 . 1 15 . 0 × = 0.0092 14 331.71 6 14 8576 . 1 0025 . 0 × = e− 1.8763e-6 17 0.0328 17 8576 . 1 3 . 0 × = 0.0073 16 290.25 6 16 8576 . 1 0025 . 0 × = e− 1.6125e-6 19 0.0293 9 1 8576 . 1 3 . 0 × = 0.0058 18 258 6 18 8576 . 1 0025 . 0 × = e− 1.1469e-6 THDi (%) 7.55%
表 4.6 400W 輸出 400Hz 模擬輸入電流諧波規範 輸出功率:400(W) 基本波:3.7729(A) DO-160 奇次諧波規範 電流 DO-160 偶次諧波規範 電流 3 0.1886 3 3.7729 0.15× = 0.2763 2 0..0189 2 3.7729 01 . 0 × = 23.167e-6 5 0.2264 5 3.7729 0.3× = 0.1497 4 0.0094 4 3.7729 01 . 0 × = 7.9903e-6 7 0.1617 7 3.7729 0.3× = 0.0935 6 1.572 3 6 3.7729 0025 . 0 × = e− 4.9482e-6 9 0.0629 9 3.7729 0.15× = 0.0604 8 1179.03 6 8 3.7729 0025 . 0 × = e− 3.5654e-6 11 0.1029 11 3.7729 0.3× = 0.0387 10 943.23 6 10 3.7729 0025 . 0 × = e− 2.7639e-6 13 0.0870 13 3.7729 0.3× = 0.0240 12 786.02 6 12 3.7729 0025 . 0 × = e− 2.2408e-6 15 0.0377 15 3.7729 0.15× = 0.0142 14 673.73 6 14 3.7729 0025 . 0 × = e− 1.8763e-6 17 0.0666 17 3.7729 0.3× = 0.0084 16 589.52 6 16 3.7729 0025 . 0 × = e− 1.6125e-6 19 0.0596 19 3.7729 0.3× = 0.0058 18 524.01 6 18 3.7729 0025 . 0 × = e− 1.1469e-6 THDi (%) 7.55%
表 4.7 600W 輸出 400Hz 模擬輸入電流諧波規範 輸出功率:600(W) 基本波:5.6872(A) DO-160 奇次諧波規範 電流 DO-160 偶次諧波規範 電流 3 0.2844 3 5.6872 0.15× = 0.7128 2 0..0284 2 5.6872 01 . 0 × = 180.8e-6 5 0.3412 5 5.6872 0.3× = 0.3371 4 0.0142 4 5.6872 01 . 0 × = 2.8656e-6 7 0.2437 7 5.6872 0.3× = 0.1668 6 2369.67 6 6 5.6872 0025 . 0 × = e− 0.8897e-6 9 0.0948 9 5.6872 0.15× = 0.0769 8 1777.25 6 8 5.6872 0025 . 0 × = e− 1.1081e-6 11 0.1551 11 5.6872 0.3× = 0.0361 10 1421.8 6 10 5.6872 0025 . 0 × = e− 1.1273e-6 13 0.1312 13 5.6872 0.3× = 0.0263 12 1184.83 6 12 5.6872 0025 . 0 × = e− 0.8549e-6 15 0.0569 15 5.6872 0.15× = 0.0226 14 1015.57 6 14 5.6872 0025 . 0 × = e− 0.5419e-6 17 0.1004 17 5.6872 0.3× = 0.0164 16 888.63 6 16 5.6872 0025 . 0 × = e− 0.4542e-6 19 0.0898 19 5.6872 0.3× = 0.0109 18 789.89 6 18 5.6872 0025 . 0 × = e− 0.5143e-6 THDi (%) 14.36%
4.2.2 暫態模擬 除了考慮電路穩態下輸入電流的波形,同時也必須關注的是暫態響應,當負 載突然變化的時候,由輕載變重載或由重載變輕載時,檢視其控制器是否能穩定 的控制,直流鏈輸出電壓是否能儘快的調節,輸入電流波形是否仍保持正弦並和 輸入電壓同相。同樣的,頻率 400Hz 輸入電壓下,再觀察其變化是否符合預期。 如圖 4.11,在此模擬負載由 400W 升至 600W 之暫態響應,可看出 VO受到擾動約 7V,輸入電流 is峰值由 6A 上升至 10A,其安定時間大約在 50ms。 200V 205V 195V VO 25ms 0 60V 120V 180V -5A -10A -15A is vs 圖 4.11 60Hz 模擬輸入電壓下暫態響應
同樣地,改由頻率 400Hz 輸入電壓,如圖 4.12,觀察其波形可看出,大致和 60Hz 輸入電壓差距無幾,VO受到擾動約 8V,輸入電流 is峰值由 5A 上升至 10A, 其安定時間大約 200ms。 200V 205V 195V VO 25ms 0 60V 120V 180V -5A -10A -15A is vs 圖 4.12 400Hz 模擬輸入電壓下暫態響應
第五章
電路實作
5.1 現場可規劃邏輯陣列
現場可規劃邏輯閘陣列(Field Programmable Gate Array,FPGA)是一種可規劃 邏輯陣列 IC,它提供了「邏輯閘陣列」(Gate Array,GA)元件的特性與「可程式陣 列邏輯」(Programmable Array Logic,PAL)元件的規劃彈性,具有以下幾個特點: 一、使用者可以任意規劃邏輯電路;二、FPGA 元件可以重複使用燒錄;三、可以 快速合成使用者的電路;四、具有完善的軟體可以配合使用。 利用 FPGA 來實現控制系統有著不少優勢在,除了有較高的運算時脈外,其 平行運算的能力也相當高。除此之外,利用 FPGA 實現的控制器,其行為也非常 接近等效之類比控制器,而且不但能保留其優點,如無計算上的延遲(No Calaulation Delay)、更高的頻寬(Higher Bandwidth)等;更能將其缺點排除,如參數飄移
(Parameter Drifting)、較低的積分層級(Poor Level of Integration)[ ]。除此之外,與其 類似功能之 CPLD 做比較亦存在不少優點,在編程上 FPGA 比 CPLD 具有更大的 靈活性,且 FPGA 非常適合複雜邏輯結構,這些優勢也讓 FPGA 更適合使用在控 制系統上。
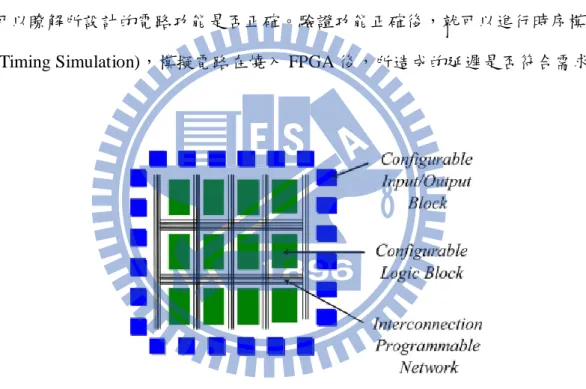
FPGA 元件內部主要包含了三大部分,數百個到數千個標準的可程式邏輯單元 (Configurable Logic Blocks,CLBs),排列形成 M × N 的電路矩陣;每個邏輯單元 均連接至縱向網路及橫向網路,外部在圍繞一圈輸入輸出單元,如圖 5.1 所示,當 電路完成設計後,便可以把產生之電路架構編譯檔下載至 FPGA 中進行連線規劃, 成為一顆具有特定功能之 IC。這樣不但縮短了研發時間,同時又擁有多次燒錄等 功能,而且也大大增加設計方法上之彈性。
接下來將介紹 FPGA 的設計流程。首先 FPGA 的設計方法有二種,分別為圖 形化流程(Schematic Flow)以及硬體描述語言編輯(HDL Editor),然而近年來電路設
計的規模日益龐大複雜,若使用圖形化的設計方法相當的費時且容易發生錯誤, 因此利用硬體描述語言的設計方法成為主流,一般常見的硬體描述語言有 VHDL、 Verilog 等,而本論文所使用的為 Verilog,由於接近 C 語言的語法撰寫,使得較 VHDL 來的容易上手,而撰寫硬體描述語言最重要的就是電路的觀念,以及訊號 實續的正確性,因此在程式撰寫的概念上有別於 C 語言與 MATLAB 等逐行編譯的 程式語言。 將所希望設計的電路利用圖形化流程或是硬體描述語言完成後,接下來則可 以做行為模擬(Behavior Simulation)及合成後的函數模擬(Function Simulation),藉此 可以瞭解所設計的電路功能是否正確。驗證功能正確後,就可以進行時序模擬 (Timing Simulation),模擬電路在燒入 FPGA 後,所造成的延遲是否符合需求。
圖 5.1 FPGA 元件基本結構 本實驗所使用之現場可規劃邏輯閘陣列發展板,型號為
UBD-Spartan3E-ST3E。其核心為 Xilinx 公司研製,型號為 Spartan-3E XC3S250E, 並配合 Xilinx ISE 8.2i 之軟體進行電路撰寫及模擬。此核心內含 4896 個 4 輸入 LUT(Look-Up Table)及 D 型正反器(D-Type Flip-Flop),封裝為 PQFP 208 隻腳位, 其中供使用者使用的腳位有 158 隻。此外,還包含了有 12 個 18K-bits 的 Block RAMs,12 個 18 乘 18 的硬體乘法器。實驗板上則提供 8 個指撥開關及 LED 介面 及 40MHz 之石英震盪器等。
5.2 實作電路組成
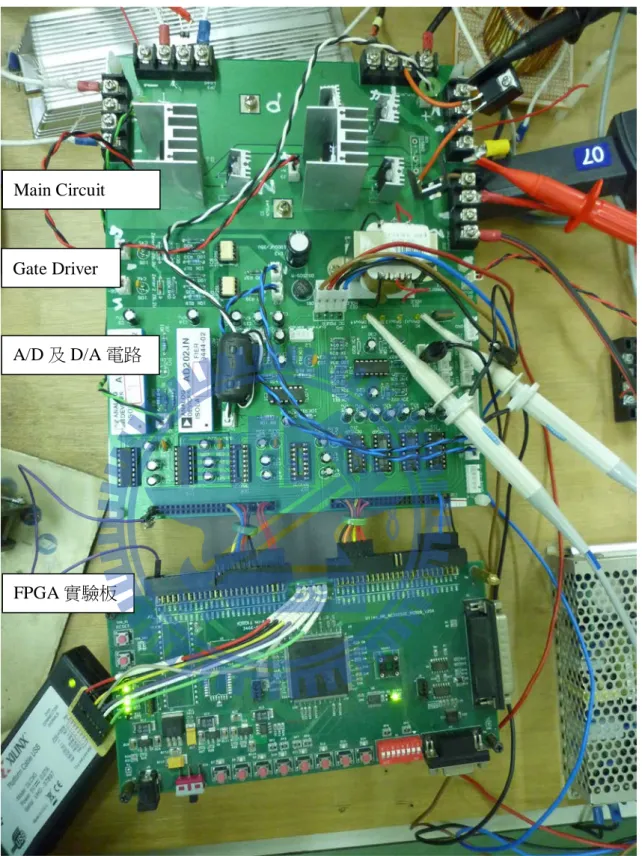
無橋式昇壓型 PFC 電路之無電流感測控制實作,利用 FPGA 做為實現無電流 感測實作之平台,並有數位類比轉換電路及開關驅動電路,當作主電路和 FPGA 之間的媒介。大致上其架構如圖 5.2 所示。
數位類比轉換電路分別為 A/D 轉換電路及 D/A 轉換電路,A/D 轉換電路是迴 授輸出電壓及輸入電壓,D/A 轉換電路是對 FPGA 內部訊號進行觀察,雖 D/A 轉 換電路並非無電流感測控制所必須,其目的為確保數位訊號的正確性。 開關驅動電路從 FPGA 接受 PWM 訊號,進行隔離放大以驅動無橋式昇壓型 PFC 中的主動元件 IGBT 開關。實際電路由圖 5.3 呈現。 Gate Driving Circuit D/A Circuit GND PWM CLK2 EN DATA FPGA XC3S250E Isolation amplifier A/D Circuit CLK1 SDATA CONVST SFRM A0 A1 A2 + -Vo + -s v s i s v L r A T TB C − + o V L + − A D B D dc I G at eA G at eB S o u rc eB AC Power Source S o u rc eA L r L 1 D D2 3 D D4 圖 5.2 實作電路組成架構圖
圖 5.3 實作電路照片 A/D 及 D/A 電路
Gate Driver
FPGA 實驗板 Main Circuit
5.2.1 數位類比轉換電路(A/D Circuit & D/A Circuit)
實作中,完整 A/D 轉換電路組成如圖 5.4,整個電路實作需回授輸出電壓v 及o 輸入電壓v 。由於所使用 ADC 為 IC MAX121,其輸入取樣電壓為在±5V 之間,故s
先藉由電阻分壓使其控制在±5V 之間。電阻分壓後再用隔離放大器 IC AD202,使 輸出電壓和輸入電壓二者與取樣電路隔離,避免輸出電壓與輸入電壓直接進入取 樣電路對其造成損傷。再藉由 FPGA A/D 模組與 MAX121 兩者做溝通,即完成 A/D 轉換。
D/A 轉換器電路組成就如同圖 5.5 所示,首先由 FPGA 內部的 D/A 模組給予 由數位轉類比 IC PCM56P 有特殊含意的訊號,再經過一個反相放大器將 PCM56P 輸出的±3V 放大到±10V 給予示波器觀測。而 D/A 轉換器在系統中同樣對於驗證 FPGA 程式有相當大的助益。 38 3 1 2 19 18 20 22 Ω k 10 Ω k 10 15V Ω k 10 + -Ω k 10 TL074 F µ 01 . 0 AD202 Ω k 910 − + o V 38 3 1 2 19 18 20 22 Ω k 10 Ω k 10 15V AD202 Ω k 470 − + s v Ω k 10 + -Ω k 10 TL074 F µ 01 . 0 3 2 6 7 16 4 5 1 15 14 11 13 9 8 F µ 22 0.1µF 5V MAX121 -15V FPGA XC3S250E S F R M 1 C O N V S T 1 S D A T A 1 C L K S F R M 2 C O N V S T 2 S D A T A 2 C L K 3 2 6 7 16 4 5 1 15 14 11 13 9 8 F µ 22 0.1µF 5V MAX121 -15V 圖 5.4 A/D 轉換電路
1 PCM56P V 5 − V 5 CLK2 EN DATA FPGA XC3S250E TL074 Ω k 10 Ω k 23 Ω 100 8 3 16 5 6 7 13 11 12 9 10 2 圖 5.5 D/A 轉換電路
5.2.2 開關驅動電路(Gate Driving Circuit)
如圖 5.6 所示,從 FPGA 取得 PWM 開關訊號進入開關驅動電路,在產生足夠 大的電壓以驅動主電路中 IGBT 開關。從 PWM 訊號首先由光耦合 IC TLP250 進行 隔離,當 PWM 為高電位時,TLP250 中腳位 6、8 會導通,經由後級電路可得 Gate 端與 Source 端產生約 16V 的電壓使得開關 IGBT 導通;反之 PWM 為低電位時, TLP250 中腳位 5、6 會導通,經由後級電路可得 Gate 端與 Source 端產生約-8V 的 電壓使得開關 IGBT 截止。 2 3 8 5 TLP250 6 Ω 330 DS2505-M V mF 35 1 Zener 8.2V 1µF Ω k 10 Ω 50 Ω k 100 18V/110V PWM Gate Source 圖 5.6 開關驅動電路
5.3 控制器合成
在合成實作硬體電路後,接下來就需要在 FPGA 電路板中完成無電流感測控 制架構之電路合成。在 FPGA 中所包含模組,主要有無電流感測控制模組,另外 還有除頻模組、A/D 模組、D/A 模組、查表模組、以及 PWM 模組。而無電流感測 控制模組的合成可用圖 5.7 無電流感測控制模組時序圖做解釋。 S#0 S#1 S#2 S#3 S#4 S#5 S#6 S#7 o v * o V P K I K D A/D 12bit 92 1 s v 48 1 L Vˆ ∑ × × ∑ ∑ ABS vs + − + + + + s v Table S#8 S#10 S#11 S#12 S#13 S#14 S#15 Table F V + − − L Vˆ ∑ × × L rL ω ∑ s v + + ) ( 2 t s ω ) ( 1 t s ω Gate Signal Generater ) (vs sign S#9 GA GB d s v PLL Timer 圖 5.7 無電流感測控制模組時序圖 S#1 到 S#7 為電壓迴路,其中包含 A/D 模組和一個電壓控制器。首先將回授 的輸出電壓和輸入電壓經過 A/D 模組轉換成 12 位元的資料,最高位元為正負位 元。電壓控制器是由一個 PI 控制器所構成,由 A/D 模組產生輸出電壓的數位訊號與參考電壓 *V 相減後所得誤差,進入 S#3 到 S#6 的 PI 控制器產生出電感電壓命o 令VˆL。 S#9 到 S#17 為開關訊號產生迴路,S#8 將輸入電壓 vs鎖相,並抓取其零交越 點,然後在 S#9 以週期(1/60)及(1/400)秒設定一計時器以用來查表,S#10、S#11 中 內建 2 個表分別為 s1(ωt)和 s2(ωt),考慮在每一次開關週期查表一次,亦即查表的 時間間隔為 25μs。而 S#10 到 S#11 為將此查表位置累加,而進入 S#12、S#13 再 乘上估測電感電壓VˆL。而後 S#14 加上開關及二極體不理想因素的補償,產生出 控制訊號 d。S#15 為 PWM 的模組,利用 S#14 所產生的控制訊號 d,經過開關分 配而得到二組開關訊號輸出。整個控制迴路利用 25μs 完成。其餘在 FPGA 所實 現的模組還有除頻模組和 D/A 模組。除頻模組是將 FPGA 基頻 40MHz 分別產生 20MHz、10MHz、4MHz、40kHz 和 20kHz 等時脈,來當作觸發其餘模組所用。 D/A 模組雖非無電流感測控制器所必須,但可藉由此模組觀察 FPGA 內部訊號, 對於 FPGA 的合成有很大的幫助。表 5.1 為此架構下之 FPGA 使用率。 表 5.1 各種架構下之 FPGA 使用率 可使用 已使用(使用率) 4 Input LUTs 4896 1394(28%) D-type Flip-Flops 4896 377(7%) IOBs 158 23(14%) MULT 18×18s 12 5(41%)
5.4 無電流感測之實作
在本節中將以 FPGA 實作理想輸入電壓下 60Hz 及 400Hz 頻率下,輸出 200W、 400W、600W 輸出,並記錄其各次輸入電壓及電流諧波值,並與 A 類及 D 類規範或 DO-160 規範做比較,驗證其控制法則的可行性。 5.4.1 頻率 60Hz 輸入電壓下之穩態實作 在下列的穩態實作中,將輸入定為 60Hz 理想電壓 110Vrms,此時輸出端負載 接電阻 200Ω、100Ω及 66.67Ω使輸出分別為 200W、400W 及 600W,此時利用示 波器量測輸入電壓及輸入電流,如圖 5.8 至圖 5.10,並透過功率計記錄各次電流諧 波的大小值,並整理成下表 5.2。 表 5.2 60Hz 實作輸入電壓下各次諧波及其 THDi 輸出功率 諧波次數 200W 400W 600W 1-基本波 (單位:A) 1.7616 3.4403 5.2297 奇次諧波 3 0.1575 0.2844 0.5743 5 0.0551 0.0389 0.0844 7 0.0147 0.0368 0.0520 9 0.0145 0.0258 0.0338 11 0.0162 0.0251 0.0235 13 0.0169 0.0190 0.0158 15 0.0195 0.0209 0.0139 17 0.0185 0.0157 0.0111 19 0.0136 0.0133 0.0085 偶次諧波 2 0.0718 0.0460 0.1069 4 0.0420 0.0253 0.0284 6 0.0380 0.0353 0.0238 8 0.0214 0.0243 0.0177 10 0.0166 0.0183 0.0138 12 0.0093 0.0086 0.0125 14 0.0099 0.0112 0.0070 16 0.0040 0.0021 0.0057 18 0.0027 0.0035 0.0040 20 0.0029 0.0012 0.0029 THDi (%) 11.27% 8.80% 11.41%
vs is 0 -5A 60V Vo 5ms -10A -15A 120V 180V THDi=11.27% 圖 5.8 200W 輸出 60Hz 實作輸入電壓及電流波形 vs is 0 -5A 60V Vo 5ms -10A -15A 120V 180V THDi=8.8% 圖 5.9 400W 輸出 60Hz 實作輸入電壓及電流波形 vs is 0 -5A 60V Vo 5ms -10A -15A 120V 180V THDi=8.8% 圖 5.10 600W 輸出 60Hz 實作輸入電壓及電流波形
5.4.2 頻率 400Hz 輸入電壓下之穩態實作 此時輸入電源改為 400Hz 理想電壓 110Vrms,輸出端負載接電阻 200Ω、100 Ω及 66.67Ω使輸出分別為 200W、400W 及 600W,此時利用示波器量測輸入電壓 及輸入電流,如圖 5.11 至圖 5.13,並透過功率計記錄各次電流諧波的大小值,並 整理成下表 5.3。 表 5.3 400Hz 實作輸入電壓下各次諧波及其 THDi 輸出功率 諧波次數 200W 400W 600W 1-基本波 (單位:A) 1.8428 3.6783 5.6295 奇次諧波 3 0.1790 0.2531 0.4722 5 0.0680 0.0924 0.1016 7 0.0426 0.0606 0.0795 9 0.0196 0.0399 0.0568 11 0.0178 0.0331 0.0521 13 0.0118 0.0252 0.0396 15 0.0058 0.0179 0.0319 17 0.0070 0.0142 0.0225 19 0.0053 0.0105 0.0193 偶次諧波 2 0.0183 0.0332 0.0409 4 0.0322 0.0370 0.0329 6 0.0166 0.0241 0.0198 8 0.0115 0.0179 0.0113 10 0.0046 0.0125 0.0088 12 0.0023 0.0107 0.0042 14 0.0011 0.0087 0.0031 16 0.0005 0.0070 0.0027 18 0.0009 0.0056 0.0014 20 0.0002 0.0064 0.0027 THDi (%) 11.15% 8.00% 8.95%
vs is 0 -5A 60V Vo 500μs -10A -15A 120V 180V THDi=11.15% 圖 5.11 200W 輸出 400Hz 實作輸入電壓及電流波形 vs is 0 -5A 60V Vo 500μs -10A -15A 120V 180V THDi=8.0% 圖 5.12 400W 輸出 400Hz 實作輸入電壓及電流波形 vs is 0 -5A 60V Vo 500μs -10A -15A 120V 180V THDi=8.95% 圖 5.13 600W 輸出 400Hz 實作輸入電壓及電流波形
5.4.3 頻率 60Hz 輸入電壓下之暫態實作 在原來輸出 400W 下切載至 600W,利用示波器觀察輸入電流及輸出電壓的變 化,其切換負載大至在 100ms 內,輸入電流可以平穩的變化,而輸出電壓僅漣波 電壓稍微增加,如下圖 5.14。 vs is 0 -5A 60V Vo 20ms 200V 190V 210V 120V 180V -10A -15A 圖 5.14 60Hz 實作輸入電壓及電流之暫態響應
5.4.4 頻率 400Hz 輸入電壓下之暫態實作 如同上一小節,將輸入改為 400Hz 理想輸入電壓,輸出 400W 下切載至 600W, 利用示波器觀察輸入電流及輸出電壓的變化,其切換負載大致仍在 100ms 內,如 下圖 5.15。 0 -5A 60V Vo 200V 190V 210V vs is 10ms 120V 180V -10A -15A 圖 5.15 400Hz 實作輸入電壓及電流之暫態響應
5.5 諧波規範比較
在下表 5.4 至 5.6 中,分列出在頻率 60Hz 理想輸入電壓下,各輸出功率下所 得電流諧波成分與 IEC 61000-3-2 之 A、D 類規範做比較,均有符合此規範。而在 表 5.7 中,列出了在頻率 400Hz 理想輸入電壓下,各輸出功率下所得電流諧波成分 與 DO-160 規範,在偶次諧波尚未達到標準,而奇次諧波僅 3 次諧波尚未符合規範。
表 5.4 200W 輸出 60Hz 實作輸入電流與諧波規範 輸出功率 諧波次數 A 類規範(安培) D 類規範 (安培) 輸入電流 1-基本波 (單位:A) 1.7676 奇次諧波 3 2.30 200×0.0034=0.68 0.1575 5 1.14 200×0.0019=0.38 0.0551 7 0.77 200×0.0010=0.20 0.0147 9 0.40 200×0.0005=0.10 0.0145 11 0.33 200×0.00035=0.07 0.0162 13 0.21 200×0.000296=0.0592 0.0169 15 0.15 15 15 0.15× = 0.0513 15 0.00385 200× = 0.0195 17 0.1324 17 15 0.15× = 0.0453 17 0.00385 200× = 0.0185 19 0.1184 19 15 0.15× = 0.0405 19 0.00385 200× = 0.0136 偶次諧波 2 1.08 0.0718 4 0.43 0.0420 6 0.30 0.0380 8 0.23 8 8 0.23× = 0.0214 10 0.184 10 8 0.23× = 0.0166 12 0.1533 12 8 0.23× = 0.0093 14 0.1314 14 8 0.23× = 0.0099 16 0.115 16 8 0.23× = 0.0040 18 0.1022 18 8 0.23× = 0.0027 20 0.092 20 8 0.23× = 0.0029 THDi (%) 11.27%