崩塌災害評估儀器與預警系統技術發展
Development of Assessment Instrument and Early Warning System of Collapse Disaster prevention
主管單位:國家實驗研究院儀器科技研究中心 廖泰杉
1 陳佑杰1 黃泰綸1 陳銘福1Liao, Tai-Shan Chen, Yu-Chieh Chen, Ming-Fu
陳怡如1 李皇辰2 詹鈞評3
Chen, Yi-Ju
Lee , Huang-Chen
Jan, Jyun-Ping
1財團法人國家實驗研究院儀器科技研究中心
2中正大學通信工程研究所
3成功大學空間與資訊研究所
摘要
台灣地區山地為全島三分之二,坡地崩塌災害預警與災區復建往往會是防災減 災一個重要課題,本計劃就是透過國家實驗研究院儀器科技研究中心能量與學界合 作搭配共同為台灣崩塌災害評估儀器與預警系統技術發展。預期這些技術開發後,
未來可對於國內坡地網路感測節點通信傳輸,快速取像系統與坡地崩塌區之定點近 景觀測系統技術,提供更有效的資訊,降低災害預警之成本與時效性,並培育國內 防災預警儀器相關需求技術能量。
關鍵詞:災害預警儀器、近景觀測系統技術
Abstract
Since the mountain area is around two-third of Taiwan territory, the disaster rehabilitation and hazard warning of slope collapse are always be the major task of disaster prevention. In this project, Instrument Technology Research Center (ITRC) tries to co-work with academic researchers for instrument and technology development in landslide hazard assessment and early warning systems. The major research topic is on sensing network communication capability, of rapid image capturing performance and real-time close-range monitoring technology for slope collapse area monitor. These techniques will improve the quality and efficiency of collected data and lower the cost of disaster warning system.
Mean-while, this project will also cohesion the R&D energy of disaster warning instrument development.
Keywords:Disaster warning instruments, close-range monitoring technology.
一、前言
儀科中心配合災防科技中心執行「大規模崩塌災害防治技術與風險地 圖建置計畫」共同發展坡地崩塌災害監測技術與預警機制。儀科中心以「整 合與應用國內儀器相關技術研究相關能量,並發展坡地潛勢崩塌區域之預 警網路系統技術與快速取像判識系統評估技術之災防支援團隊」為目標,
並積極配合國內防災評估與預警儀器相關技術需求,以支援政府之災害評 估與預警之準確性。102 年之技術發展研發工作於:(1)坡地多點感測器模 組與通信架構系統技術可行性評估;(2)坡地崩塌區域之快速取像判識系統 建置;(3)坡地崩塌區之定點近景即時監測,其目的為來提供保護人民生命 財產與災前預警安全撤離儀器技術開發研究。
二、研究方法
2.1
坡地多點感測器模組與通信架構系統技術原理可行性評估崩塌災害評估儀器與系統技術發展中坡地多點感測器模組與通信架構系統技術 可行性評估提出一種無線感測網路封包傳輸節點裝置及其控制方法,節點裝置統計 時間內記錄單次未接收到測試回傳封包以及連續N次未接收到測試回傳封包為記錄 資料以生成上限值、下限值以及多個門檻值以設定多個傳輸層級並設定每一個傳輸 層級對應的傳輸設定,再判斷資料回傳封包的接收狀況以累加或遞減狀態值以找出 對應的傳輸層級並取得對應的傳輸設定,提供下次資料封包的傳輸設定,藉此可以 達成提升無線感測網路室外應用封包傳輸成功率且節能省電的技術功效。
圖 1 為無線感測網路封包傳輸節點裝置方塊圖。本研究的無線感測網路封包傳輸 節點裝置 10,其包含:測試封包傳輸模組 11、記錄模組 12、統計模組 13、資料封 包傳輸模組 14、狀態累計模組 15、層級設定模組 16 以及層級判斷模組 17。
圖 1 無線感測網路封包傳輸節點裝置示意方塊圖
首先由節點裝置 10 的測試封包傳輸模組 11 廣播測試封包,並於回傳時間 之內等待接收其他的節點裝置對測試封包進行回應的測試回傳封包,當節點裝 置 10 的測試封包傳輸模組 11 於回傳時間之內自其他的節點裝置接收測試回傳
封包時,則等待回傳時間到時,再次由節點裝置 10 的測試封包傳輸模組 11 廣 播測試封包,而當節點裝置 10 的測試封包傳輸模組 11 於回傳時間之內無法自 其他的節點裝置接收測試回傳封包時,會再次由節點裝置 10 的測試封包傳輸模 組 11 廣播測試封包,亦即節點裝置 10 的測試封包傳輸模組 11 會每隔回傳時間 廣播測試封包,直到第一節點裝置 10 的測試封包傳輸模組 11 停止廣播測試封 包為止。上述的測試封包包含節點裝置 10 所收到其他節點裝置的接收信號强度 指示(Received signal strength indication,RSSI)以及其他節點裝置所收 到節點裝置 10 的接收信號强度指示,且測試回傳封包包含其他節點裝置所收到 節點裝置 10 的接收信號强度指示以及節點裝置 10 所收到其他節點裝置的接收 信號强度指示。在此同時,節點裝置 10 的記錄模組 12 於統計時間內進行未接 收到測試回傳封包的記錄,未接收到測試回傳封包又分為單次未接收到測試回 傳封包以及連續 N 次(N 為大於 2 的整數)未接收到測試回傳封包,亦即節點 裝置 10 的記錄模組 12 會於統計時間內分別記錄單次未接收到測試回傳封包的 次數、連續 2 次未接收到測試回傳封包的次數、連續 3 次未接收到測試回傳封 包的次數…等,在此僅為舉例說明之,並不以此侷限本發明的應用範疇,而節 點裝置 10 的記錄模組 12 即會於統計時間內記錄單次未接收到測試回傳封包以 及連續 N 次未接收到測試回傳封包為記錄資料,上述的統計時間可為一小時、
一天、一星期、一個月…等,在此僅為舉例說明之。節點裝置 10 的統計模組 13 會依據記錄資料以機率統計計算以生成上限值、下限值以及多個門檻值,假 設記錄資料中單次未接收到測試回傳封包的次數為“80 次”,連續 2 次未接收 到測試回傳封包的次數為“15 次”,連續 4 次未接收到測試回傳封包的次數為
“5 次”,依據機率統計計算以生成上限值為“2”、下限值為“-4”以及門檻 值分別為“0”、“-1”、“-2”以及“-3”,在此僅為舉例說明之,並不以此 侷限,由上述可知上限值、下限值以及門檻值為整數,且上限值會大於下限值。
接著,在初次由節點裝置 10 的資料封包傳輸模組 14 廣播資料封包時,此時節 點裝置 10 預設的狀態值為“1”,即會直接由節點裝置 10 的資料封包傳輸模組 14 進行資料封包的廣播,並於回傳時間之內等待接收其他節點裝置對資料封包 進行回應的資料回傳封包。當節點裝置 10 的資料封包傳輸模組 14 接收到與資 料封包對應的資料回傳封包時,即可由節點裝置 10 的狀態累計模組 15 將狀態
值累加 1,亦即狀態值會由“1”累加至“2”,而當節點裝置 10 的資料封包傳 輸模組 14 未接收到與資料封包對應的資料回傳封包時,即可由節點裝置 10 的 狀態累計模組 15 將狀態值遞減 1,亦即狀態值會由“1”遞減至“0”,值得注 意的是,當狀態值會由“2”累加至“3”時,由於狀態值為“3”已超過上限值 為“2”,此時節點裝置 10 的狀態累計模組 15 即會將狀態值設定為上限值,即 狀態值會被設定為“2”,當狀態值會由“-4”遞減至“-5”時,由於狀態值為
“-5”已超過下限值為“-4”,此時節點裝置 10 的狀態累計模組 15 即會將狀 態值設定為下限值,即狀態值會被設定為“-4”,由上述可知狀態值為整數,
且狀態值分別介於上限值以及下限值之間。在節點裝置 10 的統計模組 13 計算 以生成上限值、下限值以及多個門檻值之後,節點裝置 10 的層級設定模組 16 即可依據上限值、下限值以及多個門檻值設定多個傳輸層級,並設定每一個傳 輸層級對應的傳輸設定,上述的傳輸設定包含直接廣播所述資料封包以及延遲 M 次(M 為大於 1 的整數)資料封包廣播時間後廣播所述資料封包。承上述舉例 來說,節點裝置 10 的統計模組 13 計算以生成的上限值為“2”、下限值為“-4”
以及門檻值分別為“0”、“-1”、“-2”以及“-3”。節點裝置 10 的層級設 定模組 16 即可將數值“2”以及“1”設定為“第一傳輸層級”,且第一傳輸層 級對應的傳輸設定為“直接廣播資料封包”。節點裝置 10 的層級設定模組 16 即可將數值“0”設定為“第二傳輸層級”,且第二傳輸層級對應的傳輸設定為
“延遲 1 次資料封包廣播時間後廣播資料封包”。節點裝置 10 的層級設定模組 16 即可將數值“-1”設定為“第三傳輸層級”,且第三傳輸層級對應的傳輸設 定為“延遲 2 次資料封包廣播時間後廣播資料封包”。節點裝置 10 的層級設定 模組 16 即可將數值“-2”設定為“第四傳輸層級”,且第四傳輸層級對應的傳 輸設定為“延遲 3 次資料封包廣播時間後廣播資料封包”。節點裝置 10 的層級 設定模組 16 即可將數值“-3”設定為“第五傳輸層級”,且第五傳輸層級對應 的傳輸設定為“延遲 4 次資料封包廣播時間後廣播資料封包”。節點裝置 10 的層級設定模組 16 即可將數值“-4”設定為“第六傳輸層級”,且第六傳輸層 級對應的傳輸設定為“延遲 5 次資料封包廣播時間後廣播資料封包”。另外節 點裝置 10 的層級判斷模組 17 即會對節點裝置 10 的狀態累計模組 15 所累計或 是遞減後的狀態值進行對應的傳輸層級的判斷,以取得對應的傳輸設定。承上
述舉例,假設節點裝置 10 的狀態累計模組 15 所累計的狀態值為“2”,此時狀 態值為“2”與上限值為“2”相同,此時對應的傳輸層級為“第一傳輸層級”,
且取得與第一傳輸層級對應的傳輸設定為“直接廣播資料封包”。而節點裝置 10 的資料封包傳輸模組 14 即可依據傳輸設定為“直接廣播資料封包”直接廣 播資料封包。假設節點裝置 10 的狀態累計模組 15 所遞減的狀態值為“-2”,
此時狀態值為“-2”與門檻值為“-2”相同,此時對應的傳輸層級為“第四傳 輸層級”,且取得與第四傳輸層級對應的傳輸設定為“延遲 3 次資料封包廣播 時間後廣播資料封包”。而節點裝置 10 的資料封包傳輸模組 14 即可依據傳輸 設定為“延遲 3 次資料封包廣播時間後廣播資料封包” 延遲 3 次資料封包廣播 時間後再廣播資料封包。透過上述節點裝置,可有效的提供無線感測網路封包 傳輸具有極佳的功耗比的技術功效。接著,以下將以一個實施例來解說本研究 的運作方式及流程,圖 2 為無線感測網路封包傳輸控制方法流程圖。圖 3 為無 線感測節點系統佈置示意圖。
圖 2 無線感測網路封包傳輸控制方法流程圖
圖 3 無線感測節點系統佈置示意圖
首先由第一節點裝置 21 的測試封包傳輸模組 11 廣播測試封包,並於回傳 時間之內等待接收第二節點裝置 22 對測試封包進行回應的測試回傳封包(步驟 101),當第一節點裝置 21 的測試封包傳輸模組 11 於回傳時間之內自第二節點 裝置 22 接收測試回傳封包時,則等待回傳時間到時,再次由第一節點裝置 21 的測試封包傳輸模組 11 廣播測試封包,而當第一節點裝置 21 的測試封包傳輸 模組 11 於回傳時間之內無法自第二節點裝置 22 接收測試回傳封包時,會再次 由第一節點裝置 21 的測試封包傳輸模組 11 廣播測試封包,亦即第一節點裝置 21 的測試封包傳輸模組 11 會每隔回傳時間廣播測試封包,直到第一節點裝置 21 的測試封包傳輸模組 11 停止廣播測試封包為止,在實施例中,是以第一節 點裝置 21 以及第二節點裝置 22 作為舉例說明,事實上會有很多個第二節點裝 置 22,在此僅為舉例說明之。
2.2 坡地崩塌區域之快速取像判識系統建置
台灣地理水文特殊,處於地震帶與颱風侵襲區域,天然災害多樣化且風險 高,再加上傳統重工業與新進高科技產業快速發展,全球暖化日趨嚴重,造
成氣候變遷,天然災害更頻繁,每次災害損失更劇烈。台灣地區每年都會發生 颱風與地震,颱風隨時都會帶來巨大水流及砂石土塊沖刷橋梁,造成橋梁墩柱 斷裂,或是橋面被洪水沖走;地震與暴雨則是房屋震毀與大面積崩山巨大災情,
第一時間觀測災情與災後重建之估算都必須依靠人造衛星與飛機空拍所須高解 析度影像酬載系統;很不幸颱風災後第一時間往往還是多雲之天氣不利於衛星 與載人航空飛機之空拍;另一方面,鑑於台灣 88 風災黃金時間基於飛安考量無 法派遣有人飛行器進入災區航拍取像,意識到建置以無人飛行載具(UAV)搭配輕 量化儀器進行勘災,用於提供及時大面積影像或災害可能熱區災情辨識,以補 足有人載具無法進入取像的空窗期之重要性。無人飛行載具則是此時最好之選 擇,固定翼雖然可以載重大與航程遠,但是使用彈性還是很有限制; 旋翼無人飛 行載具於相對於地高度 500 公尺,直徑 5 公里區域災區觀測就有很大彈性,經濟 性與機動性,因此本文著重於建立一組 4 波段取像模組適用於旋翼無人飛行載 具之系統。圖 4 相機模組為 NIKON 公司之 D700 單眼數位照相機,其中感測器有 1200 畫素高解析度相機模組,ㄧ組為 RGB 彩色像機,另外ㄧ組為具 830nm-980nm
濾波片之短波紅外(SWIR)像機,兩個像機以些許傾角相使影像互對地重疊,以 使 RGB 影像與近紅外影像能重合一起;因為植物之於近紅外有很強反射光譜,
有別於 RGB 影像,可快速分辨災區範圍;因使用 1200 畫素之高解析度面型影像 模組,其在 1000 米高度對地約有優於 100 公分之解析度鑑別力;單眼數位照相 機其光感測器為典型的 CCD 感測器或 CMOS 感測器,光譜響應曲線約 400nm 至 1000nm;可見光的波長在 380nm - 780nm 之間; 光譜響應曲線大於 780nm 低於 1200nm 是 CCD 或 CMOS 感測器 可應用的近紅外光範圍;每一光譜區段隨這光譜 不同其光靈敏度是不同,如圖 5 所示;RGB 不同光靈敏度於 400nm 至 1000nm 中反 應情形,雖然 RCB 光於進紅外區還會有貢獻,但是貢獻比例比可見光區;但是不 管如何,現在的數位相機上 CCD 或 CMOS 感測器都可以接收感應到紅外線,但是 多數的數位相機在出廠時,為了增加色彩的鮮豔度以及降低雜訊,都會在 CCD 感測器或 CMOS 感測器前加裝紅外去除濾波器(IR-Cut Filter),因此要從現在 單眼數位相機變成進紅外相機,則只需透過改裝將紅外光學濾波器置換掉外去 除濾波器後,單眼數位照相機即可得到近紅外影像。
圖 4 具有 4 波段取像模組之弦翼無人飛行載台控制系統
圖 5 Nikon D700 光感測器光譜響應圖
實驗飛行測試採用 AS_4 型弦翼無人遙控直升機,此型飛行載具酬載重量約 5 公
斤,飛行時間最長 40 分鐘,飛行高度最高 3000 公尺; 碳纖維製作 4 波段取像模 組鏡架如圖 5 所示。
圖 5 4 波段取像模組工程模組
2.3 坡地崩塌區之定點近景即時監測
崩塌即時監測系統主要由兩部份構成:(1)崩塌監測站,(2)崩塌監控管理 系統。坡地崩塌即時監測系統由安裝於不同監測點的多個崩塌監測站,及一個位於 監控中心之崩塌監控管理系統構成,崩塌監控管理系統可連結多個崩塌監測站,成 為一個分散式架構(Distributed Architecture)的系統,系統具有擴增彈性大及節省成本、
即時坡地崩塌之自動化監測及快速災情掌握等特性及優點,監測系統之操作場景與 架構如圖 6 所示。
嵌入式崩塌監測系統
· 嵌入式系統 (ARM, Linux)
· 影像擷取與前處理
· 崩塌偵測與評估
· 資料儲存
· 網路傳輸
· 電源供應: 台電/太陽能
監測顯示幕
· 監測站
· 監測站系統狀態
· 崩塌區狀態 - 崩塌區影像 - 崩塌範圍
- 崩塌概估面積與土方量
監測管理系統
· PC Server
· 監控管理軟體
· 地理資訊系統(GIS)
· 崩塌警示
· 資料儲存
…
崩塌監控管理系統 崩塌
監測站#1 崩塌
監測站#2
崩塌 監測站#N
SysConfig, DetectReport
崩塌監測站
IP Cam Ethernet / Wireless
images
圖 6、 崩塌監測系統之操作場景與系統架構示意圖
崩塌監測站主要由嵌入式系統平台、網路攝影機、影像擷取與前處理模組、崩 塌偵測與評估模組、資料儲存模組、網路傳輸模組及電源供應模組等裝置或模組所 構成,可對崩塌潛勢區進行即時崩塌偵測。影像擷取與前處理模組以固定頻率從攝 影機擷取立體影像對,經修正處理以產生校正影像;崩塌偵測與評估模組接收校正
影像,經數值表面模型(Digital Surface Model, DSM)解算與崩塌評估分析產生崩塌偵 測結果,再將崩塌偵測結果儲存至記憶模組,及即時傳送至崩塌監控管理系統。影 像擷取與前處理模組包含影像資料擷取單元、雲雨偵測單元及影像幾何修正處理單 元。擷取之影像經雲雨偵測之後為清晰影像時,即以相機內方位參數進行幾何校正 處理,而得到校正之立體像對。崩塌偵測與評估模組包含 DSM 解算單元、崩塌區 變易評估單元、崩塌標定與估算單元。依校正立體像對可解算得到崩塌偵測區之數 值表面模型,再將 DSM 與先前儲存的參考 DSM 進行比對與評估,若其變易超過崩 塌門檻值,則進行崩塌結果參數估算及崩塌區標示,並將崩塌偵測結果儲存至資料 儲存模組,及即時傳送至崩塌監控管理系統。資料儲存模組可包含硬碟或快閃記憶 體(Flash)/安全數位卡(SD Card),以儲存監測站之系統參數及崩塌偵測結果等資料。
網路傳輸模組包含有線與無線網際網路通訊單元,以進行監測站之監測資料傳輸及 系統設定與更新操作。102 年主要目標是完成 PC-based 崩塌即時監測系統原型的設 計,及崩塌監測站的影像擷取與前處理模組與崩塌偵測與評估模組之製作與測試,
以及崩塌監測實驗站的評估與建置等工作。
崩塌監測站依 2 個相機所擷取之立體像對,先進行雲雨偵測之影像判識,以取 得可進行崩塌偵測之清晰影像,再以預先量測解算得到的相機內方位參數進行影像 幾何校正處理,然後以核幾何(Epipolar Geometry)解算技術並透過密集影像匹配,得 到監測區數值表面模型,然後再利用先前儲存的參考 DSM 進行崩塌偵測,若崩塌 範圍大於監測門檻,則在監測影像上標出崩塌區塊與堆積區塊之範圍,及估算崩塌 之面積與土方量,並將新的監測區 DSM 設定為參考 DSM,以作為後續的崩塌偵測 基本資料。監測區 DSM 為以兩部相機同步取得之兩幅影像,透過相對方位求解相 機之相對關係,並採核幾何(Epipolar Geometry)結合密集匹配演算法獲得。崩塌監測 評估參數主要以崩塌面積為基準,包含崩塌區與堆積區之範圍,為以解算得之監測 區 DSM 與參考 DSM 進行相對應位置之高程差計算,再依高程差之正負值分佈,以 連通(connected component)法得到崩塌區與堆積區,並計算其面積,若崩塌區/堆積 區面積大於某設定門檻值,則進行崩塌土方量估算。坡地崩塌監測方法之流程示意
圖如圖 7。
攝影機(2)
影像擷取與 雲雨偵測
影像幾何校正
清晰影像?
是 否
告知繼續 擷取影像
數值表面模型
解算 崩塌變易評估
崩塌面積>
門檻值?
崩塌範圍標定
是 否
崩塌量估算
告知繼續 擷取影像
偵測結果 輸出
圖 7 坡地崩塌監測方法之流程示意圖
數值表面模型之演算法流程如圖 8 所表示, 先由兩相機同時獲取立體對影像,
並萃取影像特徵點以建立相機間之相對方位,其中相機之內方位參數已由室內率定 場率定而得。然而要將相對的尺度轉換只絕對尺度量,以進行面積、體積的估算,
相機之位置則由 eGPS 量測而得。接著立體對影像經核影像轉換,及 SGM 密集匹配 視差圖,再透過前方交會即可得到崩塌地的三維表面模型。
單相機率定
相對方位求解 (SURF匹配共軛點)
立體對核影像糾正
SGM 密匹配 eGPS 測量相機座標
崩塌三維表面模型 (DSM) IPCam 立體對影像
圖 8 數值表面模型之演算法流程圖 監測實驗點之選取條件設定如下:
(1) 目標點與相機之距離在 500 公尺~1000 公尺間;
(2) 監測地點已有明顯崩塌跡象或在可預期的未來仍有機率發生崩塌;
(3) 監測點需村落鄰近,並能提供電力與網路以進行即時資料傳輸;
(4) 兩台相機的架設須有 50~100 公尺長的基線距離。
高雄市甲仙區小林國小附近符合上述條件選為測試實驗點,圖 9 為小林國小 附近山坡(崩塌地)。
圖 9 小林國小附近山坡(崩塌地)
三、研究成果
3.1 無線感測網路封包傳輸節點裝置及其控制方法實驗結果
利用上述無線感測網路封包傳輸節點裝置及其控制系統方法,以一天統計 之每一小時所實際統計封包傳輸成功率實際比較測試,如圖 10 所示
圖 10 一天統計之
每一小時所實際統計封包傳輸成功率的結果
圖 10 中的橫軸為每小時,縱軸為封包傳輸成功率,經由實際的封包傳輸成 功率數據知,可以得到使用本方法之無線感測網路封包傳輸控制封包傳輸成功 率數據(橘線)都會高於或等於未使用本方法無線感測網路封包傳輸控制封包傳
輸成功率數據(藍線)。
3.2 坡地崩塌區域之快速取像判識系統建置實驗結果
具有 4 波段取像模組之弦翼無人飛行載台於相對於地高度 500 公尺,直徑 5 公 里區域災區觀測就有很大彈性,經濟性與機動性,雲林坪頂山坡崩塌潛勢區為測試 區,座標為 X 坐標(97_259289.18; Y 坐標 97_2628873.47),影像資訊長長 10 公里,
寬 0.9 公里, 解析度:14 cm/pix;圖 11 為 空拍雲林坪頂山坡崩塌潛勢區之 RGB 正 射影像彩色照, 圖 12 為雲林坪頂山坡崩塌潛勢區之近紅外正射影像照片; 圖 13 為 RGB 與近紅外正射影像合成圖。
圖 11 、空拍雲林坪頂山坡崩塌潛勢區之 RGB 正射影像彩色照
圖 12、 雲林坪頂山坡崩塌潛勢區之近紅外正射影像照片
圖 13、雲林坪頂山坡崩塌潛勢區之 RGB 與近紅外正射影像合成圖 由於空拍影像資料量龐大,為提升後製處理速度,並避免影像重疊率太高。我 們開發一套挑圖程式,做影像前處理,將重疊幅度太大之影像移除,有效降低資料 量,且符合影像鑲嵌的重疊率要求,以提高影像處理的效率。之後再利用 Agisoft
photoscan 軟體進行影像數據處理,並生成數值地形模型(Digital Terrain Model, DTM)
和正射影像圖(Digital Orthophoto Map, DOM),並輸出符合 Google Earth 格式之 kmz 檔,如下圖 14 所示:
圖 14、影像拼接與整合流程 3.3 坡地崩塌區之定點近景即時監測系統實驗
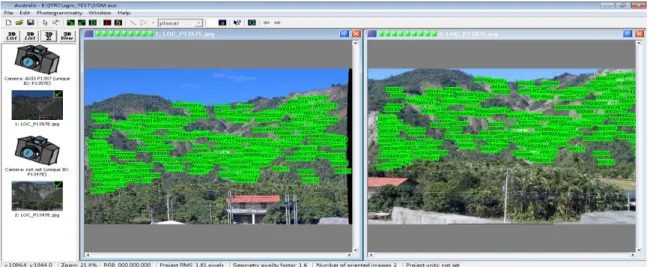
圖 15 為從兩支 IP Camera 所取得之偵測用影像,左影像為相機 P1357E,右像 則為相機 P1347E 之影像。從影像可觀察到因兩台相機架設位置不同而產生的影像 內容差異,同時因相機不同,色彩空間的呈現也有些微的差異。利用 SURF 法進行 立體對影像之特徵匹配的成果如圖 16 所示,所偵測的特徵點可均勻分布於影像上,
且在雜草叢生的地表面也能有足夠的匹配點進行影像相對方位解算。
圖 15、 左右相機擷取之偵測用影像
圖 16 以 SURF 法進行立體對影像特徵匹配之成果
為減少匹配的搜尋空間及增加匹配之效率,在進行密集匹配以求取數值表面模 型(DSM)時,需透過相對方位之解算成果,先將原始影像轉換至核影像空間,以重 建立體視覺。圖 17 所示及經轉換後的核影像立體對,可觀察共軛點位置不具 Y 視 差,僅存在左右偏移的 X 視差。
圖 17 由原始影像轉換至核影像空間之左右核影像
依左右核影像經 SGM 密集影像匹配後,可以獲取共軛點的視差值,而匹配的 視差圖如圖 18 所示。其灰度值偏亮的地方表示物體離相機距離較近,反之較暗的地 方表示距離較遠,透過視差圖已經能表示距離的變化。然而因影像前景與背景差,
可以發現山峰遮蔽區無視差值,且均調區因不具豐富的紋理資訊,亦無法正確匹配 而獲得視差資訊。為了驗證視差的匹配成果,將右核影像的灰度值,結合視差資訊,
便能轉換到與左核影像相同的影像空間。由視差轉換的成果如圖 19 所示,藉由色彩 的觀察可發現右核影像轉換的成果相當接近左核影像,同時在遮蔽區域因無數值而 呈現黑色區塊。
圖 18、 視差圖
圖 19 以右影像(左圖)之像素值套於左核影像之匹配驗證影像(右圖)
經密集匹配共軛點後,可經前方交會得到三維的點雲資訊,如圖 20,其側視圖 (左圖)顯示了物體與相機的距離,然而因遮蔽問題,導致上視圖(右圖)出現陰影區塊,
同時因為物體景深距離長,故上視圖也可以看出拉伸現象。由於監測地點目前仍無 明顯崩塌現象,因此目前仍未有該地區的崩塌土方量偵測。而為了驗證程序,未來 將建立室內模擬場,藉由些微的移動以模擬崩塌現象。
圖 20、 崩塌地三維點雲側視圖(左圖) 崩塌地三維點雲上視圖(右圖)
四、結論與建議
(1) 坡地多點感測器模組與通信架構系統技術可行性評估提出一種無線感 測網路封包傳輸節點裝置及其控制方法,未來可根據地區事件歷史經驗,訂定資料傳 遞規則,由本方法可以清楚得知,應用此事件累計與階層分類方法更可以有效率的提 高傳送的成功率,並且降低封包的傳送數量,尤其是時間愈長跡象愈明顯,進而降低 干擾其他節點的機率以節省電池電力之耗損。對野外災害感測器資料傳輸之長效運 轉是有明顯加乘作用。
(2) 坡地崩塌區域之快速取像判識系統建置之具有 4 波段取像模組之弦翼無人 飛行載台,是由兩高畫素 CMOS 全片幅單眼照相機組成的輕量影像酬載系統,其單一 長效益鋰電池可供拍攝 1000 次,約航拍 2 至 3 小時時數,大幅減低 EMI 干擾問題外。
透過設計的定時快門同步觸發系統,利用機身機械快門可使用來作兩組相機進行同 步拍攝,每台相機 32GB(視需求可擴充至 64GB)記憶體容量滿足可拍攝災區至少兩 小時以上滯空時間,實際應用與遙控直升機滯空能力相配合; 具有 4 波段取像模組 之弦翼無人飛行載台於相對於地高度 500 公尺,直徑 5 公里區域災區觀測就有很大彈 性,經濟性與機動性,搭配 1200 萬畫素高解析度影像模組可進行 (1)生活環境安全 監控與天然災害範圍評估; (2)生態多樣化及變遷與本土原生物種保育監測等特定 用途。
(3) 坡地崩塌區之定點近景即時監測技術所開發建置實驗系統,未來可於多個 被監測坡地架設,當發生崩塌災害時,提供防救災單位最快速的坡地崩塌災害資訊,
可大幅提高各潛藏崩塌之坡地的災情掌控度及救災效能。目前已完成包括實驗地點 選定、相機率定程序、相機架設安裝與調校、核影像糾正程序、密集匹配方法等工
作,已經可以網際網路由遠端即時監控與取像,然後在 PC 上以監測軟體進行坡地 崩塌的即時解算與監測,將要繼續對崩塌區演算法進行不同方式驗證,以驗證系統可 行性。
四、 參考文獻
1. 「動態調整狀態參數增強無線感測網路訊號傳送正確率裝置」民生電子科技 研討會,2013
2. 「無線感測網路封包傳輸節點裝置及其控制方法」中華民國發明專利申請 102129103 號
3. 「無線感測網路封包傳輸節點裝置及其控制方法技術報告」儀器科技研究中 心研究報告,2013
4. 「坡地多點感測器模組與通信架構系統技術可行性評估 protocol 的研發與 實作」儀器科技研究中心技術報告,2013
5. 「IMU 感測器整合於四波段同步雙相機取像系統設計」儀器科技研究中心技 術報告,2013
6. 「四波段同步雙相機取像系統」第六屆 電子工程技術研討會,2013 7. 「災害評估快速取像系統」第二十二屆國防科技研討會,2013
8. 「具有 4 波段取像模組之旋翼無人飛行載台」民生電子科技研討會,2013 9. 「高解析度四波段同步雙相機取像系統」儀器科技研究中心技術報告,2013 10. 「空拍正射影像數值地形模型製作與 google earth 整合」儀器科技研究中心
技術報告,2013
11. 「具有四波段取像模組之旋翼無人飛行載台」儀器科技研究中心研究報 告,2013
12. 「坡地崩塌即時監測系統及其方法」民生電子科技研討會,2013
13. 「坡地崩塌即時監測系統及其方法」中華民國發明專利申請 102122191 號 14. 「坡地崩塌區之定點即時監測之技術與實驗系統雛型研究報告」儀器科技研
究中心研究報告,2013
15. 「坡地崩塌偵測系統技術開發及研究」儀器科技研究中心技術報告,2013