中華民國一○六年三月 DOI: 10.6574/JPRS
Journal of Photogrammetrty and Remote Sensing
Volume 22 No.1 March 2017
Published by Chinese Society of Photogrammetrt and Remote Sensing
國家太空中心遙測衛星(Ⅲ)專刊
航 測 及 遙 測 學 刊
Journal of Photogrammetry and Remote Sensing
發行人:史天元
出版者:中華民國航空測量及遙感探測學會 地址:台北市文山區羅斯福路五段 113 號三樓 電子信件:[email protected]
網址:http://www.csprs.org.tw
PUBLISHER: Peter Tian-Yuan Shih
PUBLISHED BY: Chinese Society of Photogrammetry and Remote Sensing
Address: 3F, No.113, Sec.5, Roosevelt Road, Taipei, Taiwan E-mail: [email protected]
Web Site: http://www.csprs.org.tw 總編輯:楊明德 EDITOR-IN-CHIEF:Ming-Der Yang
國立中興大學土木工程學系 Department of Civil Engineering, National Chung Hsing University 電 話:886-4-2285-2168 Tel: 886-4-2285-2168
電子信件:[email protected] E-Mail: [email protected]
編輯委員(依中文姓氏筆劃排列) EDITORIAL BOARD
王素芬 (國立彰化師範大) S. F. Wang (National Changhua University of Education) 王聖鐸 (國立臺灣師範大學) S. D. Wang (National Taiwan Normal University) 江凱偉 (國立成功大學) K. W. Chiang (National Cheng Kung University) 何宗儒 (國立臺灣海洋大學) C. R. Ho (National Taiwan Ocean University) 吳治達 (國立嘉義大學) C. D. Wu (National Chiayi University)
周天穎 (逢甲大學) T. Y. Chou (Feng Chia University)
林士淵 (國立政治大學) S. Y. Lin (National Chengchi University) 林老生 (國立政治大學) L. S. Lin (National Chengchi University) 林昭宏 (國立成功大學) C. H. Lin (National Cheng Kung University) 林唐煌 (國立中央大學) T. H. Lin (National Central University) 邱式鴻 (國立政治大學) S. H. Chio (National Chengchi University) 洪榮宏 (國立成功大學) J. H. Hong (National Cheng Kung University) 徐百輝 (國立臺灣大學) P. H. Hsu (National Taiwan University) 張中白 (國立中央大學) C. P. Chang (National Central University) 張智安 (國立交通大學) T. A. Teo (National Chiao Tung University)
莊永忠 (逢甲大學) Y. C. Chuang (Feng Chia University)
郭俊麟 (國立東華大學) C. L. Kuo (National Dong Hwa University)
陳朝圳 (國立屏東科技大學) C. T. Chen (National Pingtung University of Science and Technology) 曾義星 (國立成功大學) Y. H. Tseng (National Cheng Kung University)
黃金聰 (國立臺北大學) J. T. Hwang (National Taipei University) 詹進發 (國立政治大學) J. F. Jan (National Chengchi University)
雷祖強 (逢甲大學) T. C. Lei (Feng Chia University)
趙鍵哲 (國立臺灣大學) J. J. Jaw (National Taiwan University) 蔡富安 (國立中央大學) F. H. Tsai (National Central University) 蔡榮得 (國立中興大學) J. D. Tsai (National Chung Hsing University)
封面照片說明 About the Cover
福爾摩沙衛星五號是台灣第一顆自主發展的光學遙測衛星,其軌道為高度 720 公里之太陽同步軌道,再 訪週期為 2 天。福衛五號兼具遙測與科學兩大任務,所搭載之光學遙測酬載為台灣首次自行研發的五光波段 複合 CMOS 影像感測器,其影像解析度為黑白 2 米和彩色 4 米,具有立體對拍攝、同一軌道多次平行同步取 像及非同步取像等能力。此外,科學任務則搭載自行研製的先進電離層探測儀,進行電離層物理特性之量 測,了解太空氣象及通訊的影響。
遙測衛星Ⅲ 張桂祥
國家實驗研究院國家太空中心
西元1972年美國發射世界上第一顆民用遙測衛星「地球資源技術衛星」,
後改稱「大地衛星」(Landsat),開啟衛星遙測影像非軍事領域的用途。西元 1986年法國發射SPOT-1衛星,1990年發射SPOT-2 衛星,SPOT-1與SPOT-2衛星 可提供10米黑白與20米彩色遙測影像。SPOT衛星影像在1986年俄羅斯車若比事 件與1991年沙漠風暴行動中聲名大噪,讓全世界更多人瞭解到衛星遙測影像對 人類的應用。
衛星遙測影像具有高度的軍事價值,在冷戰其間,僅有少數政府單位在使 用,冷戰結束後,美國開始逐步鬆綁對遙測衛星使用的限制,帶動了商用遙測 衛星的發展。美國商用遙測衛星歷經數次發射失敗,終於在1999年Ikonos-2衛星 成功發射,從此高解析度遙測衛星開始快速的蓬勃發展。
根據國家太空中心所作的統計,截至2014年底止,已有26顆GSD小於1米的 超高解析度遙測衛星在運作、24顆GSD介於1米到4米的高解析度遙測衛星在飛 行,若以擁有這些衛星的國家數來看,擁有超高解析度遙測衛星共有12個國家
,而擁有高解析度遙測衛星的國家則有20個國家。然而在這些擁有高解析度或 是超高解析度遙測衛星的國家當中,台灣是除了美國、俄羅斯、英國、法國、
德國、日本、印度、南韓、中國、以色列等,少數幾個具備製造高解析度遙測 衛星研製能力的國家。
國家太空中心很高興再次受到中華民國航空測量及遙感探測學會的邀請,
發行遙測衛星專刊,介紹台灣在遙測衛星領域技術的最新發展。首先與遙測影 像儀研製及特性相關的論文有四篇,分別是「福衛五號遙測酬載之熱分析模型 校驗」、「福衛五號光學遙測酬載結構體精密組裝」、「福衛五號遙測取像儀 性能評估與校正」以及「福衛五號遙測儀之全球增益值研究與開發」,與衛星 本體相關的有「福衛五號姿態與軌道系統硬體之極性驗證與測試」以及「福衛 五號電磁自相容測試」兩篇,最後則是與任務分析及操作有關的「福爾摩沙衛 星五號初始任務軌道調整分析與策略」。
我們期待經由這份遙測專刊的出版,能夠讓國內學術界瞭解台灣在遙測衛 星相關技術的發展現況,並希望未來能有更多人能夠投入太空科技的發展行列
,為台灣建立永續發展的太空產業奠定厚實的基礎。
專刊引言
1 1-11 106 3 1 Journal of Photogrammetry and Remote Sensing
Volume 22, No.1, 2017, pp. 1-11 DOI 10.6574/JPRS.2017.22(1).1
1國家實驗研究院國家太空中心 副研究員 收到日期:民國 105 年 09 月 06 日
2國家實驗研究院國家太空中心 正工程師 修改日期:民國 105 年 12 月 27 日
* 通訊作者, E-mail: [email protected] 接受日期:民國 106 年 02 月 03 日
福爾摩沙衛星五號初始任務軌道調整分析與策略
薛創維
1*黃楓台
2摘要
國家太空中心(以下簡稱太空中心)已完成整合測試的福衛五號預計在 2017 年發射,其任務軌道為 720 公里高的太陽同步軌道,這種軌道特性具有地面軌跡兩天再訪,在衛星轉動視角(Field of Regard,簡稱 FOR)45 度的條件下可以達成兩天全球覆蓋。然而日月的吸引力導致福衛五號軌道傾角些微的變化,2 到 3 年後升交點赤經累積的差異量將會非常顯著而導致降交點地方時漂移離開原任務所定的區間。本文提出 三種不同模擬情境以描述福衛五號的初始軌道條件並利用商用軌道分析軟體 AGI Systems Tool Kit (STK) 進行模擬、分析並說明不同初始軌道的長期變化對於福衛五號後續軌道維護的影響性。最後提出任務軌 道調整分析與策略,藉由在適當的降交點地方時正確的加入偏差值於初始理想軌道將可減少軌道維護的 次數與燃料的使用,亦可延長衛星的任務周期與壽命。
關鍵字:福衛五號、軌道分析、傾角調整、STK 模擬
1. 前言
福爾摩沙衛星五號(以下簡稱福衛五號)是台 灣第一顆自主研製的高解析度遙測衛星,其主酬載 是一個可提供黑白 2 米與彩色 4 米解析度影像的遙 測影像儀與一個科學酬載(先進電離層探測儀)。太 空中心透過福衛五號的研製計畫,除了要建立本土 小型衛星本體與遙測酬載的技術能量外,主要是要 接續 2016 年除役的福衛二號遙測衛星,持續提供 國內外使用者所需的衛星影像資料。福衛二號可每 日對台灣取像,但在衛星轉動視角(FOR) 45 度的 條件下無法對全球取像,太空中心為了達成縮短對 台灣取像週期並能全球覆蓋,於是福衛五號的軌道 選擇 720 公里、傾角為 98.27°的太陽同步軌道,該 軌道具有地面軌跡兩天重複的特性,在衛星轉動視 角 45 度的條件下,可以對全球主要陸地區域取 像。
福衛五號配備推進系統以作為初始軌道調整 以及後續軌道維護的用途,但由於該推進系統是以 冷 氣 體 (Cold gas) 為 燃 料 , 其 推 進 效 率 較 低
( = 65 sec),且所攜帶燃料有限,大約可產生速 度改變量(∆ )43 m/s。因此,太空中心必須事先完 成軌道分析與模擬,擬定初始軌道調整與後續軌道 維護策略,使得推進燃料可以做最有效率的運用,
以延長福衛五號的在軌壽命。
軌道的調整與維護對於衛星任務而言是一個 很普遍的行為(Common practice)。關於軌道調整與 維護的理論研究有很多(張國雲等,2014;楊維蓮,
2008),而在實務上則有韓國 KOMPSAT 的實例(Lee, 1999)。
利用地球質量分佈不均勻而產生軌道面進動,
且進動速率與地球繞太陽公轉速率相同的太陽同 步軌道可使軌道面與太陽保持相對固定的角度,但 由於軌道傾角受到第三體(Third Body)的影響,會 有長期變化(Secular variation),因而導致衛星降交 點地方時(Local Time of Descending Node,簡稱 LTDN)會隨時間而改變。為了讓福衛五號降交點地 方 時 (LTDN) 的變 化維 持在 一定 的範 圍 內(10:30 A.M.至 11:15 A.M.),在發射後進行適當的傾角調 整,將可使得福衛五號在五年設計壽命週期內
LTDN 滿足任務的需求。
本文主要是介紹福衛五號發射後的初始任務 軌道調整分析及其策略,全文共分四節,除了第一 節為前言外,第二節介紹太陽同步軌道原理及相關 數學理論,第三節為理論與模擬結果分析比較,第 四節則是結論。
2. 太陽同步軌道原理及相 關數學理論
一般而言,遙測衛星的軌道種類有三種,一是 非太陽同步的橢圓軌道,二是低傾角軌道,三是太 陽同步軌道。 福衛五號為圓形太陽同步軌道衛星,
因此,本文僅針對太陽同步軌道的相關理論進行說 明。
2.1 太陽同步軌道原理
地球外型為南北極較扁,赤道較寬的近橢球體,
地球外一點的重力位能可以用一個無窮級數來表 示,若僅考慮 項的影響,圓形衛星軌道的升交 點赤經 Ω(Right Ascension of Ascending Node,簡稱 RAAN)進動速率(Wertz & Larson, 1992 ; Capderou, 2006),可表示為
Ω̇ = − ⨁
⨁ cos ... (1) 其中 ⨁為地球半徑,ℎ為圓形軌道高度,i 為 軌道傾角,而 為平均運動則可表示為
=
⨁
... (2)
其中 為重力參數。所謂太陽同步軌道是指衛 星軌道面升交點赤經進動的速率與地球繞太陽公 轉一圈的平均速率相同,方向相同,所以我們有
Ω̇ = − ⨁
⨁ cos = ∘
. .... (3) 由式(3)可以得到圓形太陽同步軌道,軌道傾 角 與軌道高度ℎ的關係式。
以福衛五號選擇 720 公里高的圓型太陽同步 軌道為例,其軌道傾角 和平均運動 分別為 98.27°
和每天繞行 5226°。
2.2 衛星軌道擾動
衛星在軌道上運行,除了會受到地球非完美球 體的影響外,也會受到大氣阻力、第三體引力、太 陽幅射、地球潮汐等外在因素的擾動,進而改變原 來的軌道,也就是說軌道參數會隨時間而變化。本 文主要考慮大氣阻力與第三體引力對軌道的影 響。
2.2.1 大氣阻力
大氣阻力是影響福衛五號軌道高度最重要的 因素,由於大氣阻力是一個非保守力,它會造成衛 星軌道高度逐漸降低,如果衛星沒有進行軌道維護,
提升其軌道高度,最終衛星將會進入大氣層掉落地 球或是燒毀。
大氣阻力所產生的加速度
a
D,可表示為= − ... (4) 其中 為大氣密度, 為阻力係數, 為衛星 飛行方向截面積, 為衛星重量, 為衛星相對於 大氣的速率(Wertz & Larson, 1992)。
要精確計算大氣阻力是一件不容易的事情,除 了衛星方向截面積會隨衛星不同姿態會有所改變 外,最主要是高空大氣密度難以準確獲得。一般而 言,大氣密度模型,可以分為靜態模型與時變模型,
大 氣 靜 態 模 型 包 含 大 家 所 熟 知 的 指 數 模 型 與 Harris-Priester 密 度 模 型 , 而 時 變 模 型 則 有 Jacchia-Roberts 密度模型等(Dowd & Tapley, 1979)。
影響高空大氣密度的原因有很多,例如:日變化(地 球自轉)、27 日太陽自轉週期、11 年太陽活動週期、
半年與季節變化、旋轉大氣、地磁活動等。
要做長期軌道的預測,11 年太陽活動週期變 化是一個很重要的考量因素,而其中太陽 F10.7 指 數是一個重要的指標。依據美國國家航空太空總署 (NASA)馬歇爾太空飛行中心所提供的太陽 F10.7 指數預測圖(NASA, 2016b),如圖 1 所示,以及軌
3
道碎片計畫辦公室(Orbital Debris Program Office,
簡稱 ODPO)和美國網站 CelesTrak 對於太陽 F10.7 指數預測值(Celestrak, 2016 ; NASA, 2016a),可以 看出 2017 年以後太陽 F10.7 指數逐漸減弱到 2020 年極小值後再逐步增加,這意味著福衛五號任務初 期所受到的大氣阻力相對較小,軌道高度降低的速 度將會較慢,而後期軌道所受到的大氣阻力則是逐 步增加,後期軌道的預測與調整均需依據當時預測 的 F10.7 指數再進行估算。
圖 1 太陽 F10.7 指數預測
2.2.2 第三體擾動
日月引力是影響福衛五號軌道傾角變化的主 要原因,其中月球引力將造成軌道傾角長周期 (Long period)的變化,而太陽引力會造成軌道傾角 的長期變化(Secular variation)。在不考慮短周期和 長周期擾動的情形下,軌道傾角長期變化率為
= ∙ ... (5)
而 = ⨀ ⨀
⨀ sin
,
= 1 + cos ⨀− ⨀ sin 2(Ω − ⨀)
。
其中 ⨀為太陽的升交點赤經, ⨀為太陽的平 均運動, ⨀⁄⨀為地球繞太陽的軌道半長軸與軌道 半徑的比,⨀為黃道面傾角(Chao, 2005)。若設地 球繞太陽為一近圓軌道,式(5)可以進一步化簡為
= ⨀ sin (1 + cos ⨀) sin 2(Ω − ⨀) ... (6)
式(5)或(6)中,Ω − ⨀可視為升交點地方時 (LTAN)或降交點地方時(LTDN),因此太陽同步軌 道衛星在不同升交點赤經的軌道上運轉,會有不同 的軌道傾角長期變化率。舉例來說,正中午 12 點 時夾角 Ω − ⨀= 0°,下午 6 點時Ω − ⨀= 90°, 也就是說升交點地方時為 0 點、6 點、12 點與 18 點時,軌道傾角長期變化率等於 0,而升交點地方 時為 3 點、9 點、15 點與 21 點時傾角長期變化率 最大。
福衛五號的降交點地方時(LTDN)的範圍是從 10:30 A.M.到 11:15 A.M.,在此時間區間的傾角長 期變化率小於 0,換句話說,福衛五號的軌道傾角 會隨著時間越來越小。720 公里太陽同步軌道在不 同降交點地方時,軌道傾角長期變化率,如圖 2 所示。
圖 2 720 公里圓型太陽同步軌道,不同降交點地 方時(LTDN)軌道傾角的變化率
簡單來講,同樣高度的太陽同步軌道,但是不 同的降交點地方時(LTDN)則傾角長期變化率就不 一樣,傾角長期變化影響升交點赤經進動速率Ω̇和 升交點赤經Ω的位置,進而影響降交點地方時的時 間改變方向和時間改變速度。
2.3 衛星軌道調整方式與燃料 損耗
本節介紹三種不同軌道轉換方式,一是由一個 圓形軌道轉換到另一個圓形軌道,二是由一個橢圓 軌道轉換到另一個圓形軌道,三是由一個圓形軌道 轉變傾角到另一個圓形軌道。
2.3.1 軌道高度與傾角變換
圓形軌道轉換到圓形軌道
霍曼轉換(Hohmann Transfer)是衛星在兩個半 徑比例相差不大(約 11.9 倍以下)的同平面圓形軌 道間,進行轉換最省燃料的方式(Curtis, 2005)。衛 星首先沿圓形軌道切線方向,進行第一次脈衝推進,
進入橢圓轉移軌道,而後衛星在目標圓形軌道與橢 圓轉移軌道處,進行第二次脈衝推進,使得衛星進 入目標圓形軌道。
設初始與目標圓形軌道半徑分別是 和 ,橢 圓轉移軌道半長軸為 = ( + ) 2⁄ ,而霍 曼轉換所需速度改變量
∆ = √ ( + ) ... (7)
其中 = − / − / ,
= − / − / 。
橢圓軌道轉換到圓形軌道
設橢圓軌道近地點位置低於圓形軌道高度,而 遠地點位置高於圓形軌道高度,則衛星如同霍曼轉 換一般,可以透過兩次脈衝推進由此一橢圓軌道轉 換到圓形軌道。設衛星在橢圓軌道近地點處進行第 一次脈衝推進使衛星進入橢圓轉換軌道,當衛星運 行到橢圓轉換軌道與目標圓形軌道處進行第二次 脈衝推進,而後衛星進入目標圓形軌道。
設初始橢圓軌道的近地點與遠地點位置分別 為 和 , 則 初 始 橢 圓 軌 道 的 半 長 軸 為 = + ⁄ ,若目標圓形軌道半徑為 2 ,則橢圓 轉移軌道半長軸為 = + ⁄ ,而霍曼2 轉換所需速度改變量
∆ = √ ( + ) ... (8)
其中 = −
/
− −
/
,
= − / − / 。
軌道傾角轉換
由一個圓形軌道進行傾角變換到另一個圓形 軌道,所需速度改變量,可表示為
∆ = 2 sin∆ ... (9) 其中 為軌道改變前的圓形軌道速度,∆ 為軌 道傾角改變量。
2.3.2 火箭燃料損耗
衛星可以利用本身的推進系統進行軌道調整,
其所耗燃料是速度改變量∆ 、燃料推進效率 的 函數,可以用數學表示如下
= 1 −
∆
... (10)
其中 是速度改變前衛星的重量, 是燃料 消耗的重量, 為海平面的重力加速度。
3. 福衛五號初始軌道分析
3.1 初始軌道傾角調整理論分 析
由式(1),我們知道太陽同步軌道的升交點赤 經時變率是軌道半長軸以及軌道傾角的函數,若對 其取微分,我們有
Ω̇ = ̇∆ + ̇∆ ... (11)
升交點赤經時變率的變化和軌道半長軸以及 軌道傾角的偏差有關,假設其偏差來自初始線性偏 差與擾動變化(張國雲等,2014;楊維蓮,2008;
Lee, 1999),我們可以將這些偏差表示為
∆ = ∆ + ... (12) 以及
∆ = ∆ + ... (13) 其中∆ 和∆ 分別為初始軌道半長軸偏差與
5
初始軌道傾角偏差,將式(12)與式(13)代入式(11),
並對其積分可得
Ω = + ... (14)
其中 = ̇Δ + ̇∆ ,
= ̇ + ̇
,
而
̇ = ⨁ sin = − ̇⨀tan ... (15)
̇ = − ̇⨀ ... .(16)
值得一提的是在 Ω̇⁄ 項中,已經使用太陽同 步軌道的定義,升交點赤經的進動速率等於地球繞 太陽的公轉速率 Ω̇ = ̇⨀。
若忽略軌道半長軸變化對升交點赤經改變的 影響,且以年為單位來表示,式(14)可以進一步化 簡為
Ω = −2π tan ∆ + ... (17) 由於太陽同步軌道傾角 > 90°,由式(1)可知 Ω̇ > 0 , 又 因 為 福衛 五 號 軌道 傾 角 長期 變 化率
< 0,所以 Ω是一個開口向下時間 的函數。
升交點(降交點)赤經變化1°等於地方時變化 4 分鐘,所以式(17)可進一步表示為地方時的變化
= −8π tan ∆ + ... (18) 其中升交點赤經的單位是度,而地方時單位為 分鐘。
由式(17)或式(18)可以得知,若沒有初始傾角 偏差∆ ,以福衛五號軌道為例,降交點地方時會 一直往前方向飄移不會回頭,也就是說降交點地方 時會越來越早。如圖 3 所示。
圖 3 720 公里圓型太陽同步軌道,不同降交點地 方時(LTDN)5 年飄移情形
為了避免此一現象發生,衛星可以透過調整傾 角的方式來解決。若 < 0,則可選擇一個大於 0 初始傾角偏差。反之,若 > 0,則可選擇一個小 於 0 的初始傾角偏差。雖然初始軌道傾角偏差的選 擇可以任意,但以下兩種調整方式,可以使得降交 點(或升交點)地方時獲得特定的效果。以傾角長期 變化率小於 0 的情形來討論。
傾角調整方式一:選擇初始傾角偏差,使得衛 星在任務生命週期內降交點(或升交點)地方時飄 移量最小。
式(17)為時間的二次函數,其最大值發生在
= − ⁄ ... (19)
而最大值為
δΩ = ⁄∆ ... (20)
如果任務壽命週期 內,要使得升交點赤經 維持在上述的 Ω ,也就是說| Ω| ≤ Ω ,則 最佳初始軌道偏差值為
Δ = 1 − √2 ... (21) 傾角調整方式二:選擇初始傾角偏差,使得衛 星在任務生命週期內降交點(或升交點)地方時間 僅朝某一方向飄移,而後回到初始降交點(或升交 點)地方時
設 Ω( ) = 0,代入式(17),可以得到將軌道
的升交點赤經在任務生命週期內升交點(或降交點) 地方時在某一固定方向漂移,而後回到初始升交點 (或降交點)地方時的最佳初始軌道偏差值
Δ = − ... (22) 依據上述兩種傾角調整方式,福衛五號軌道,
以 11:00A.M.為基準,理論上的降交點地方時變化,
如圖 4 與圖 5 所示。
圖 4 軌道傾角調整方式一
圖 5 軌道傾角調整方式二
在此必須一提的是,本節中的計算,已假設軌 道傾角 與軌道傾角的長期變化率 ⁄ 是常 數,一般是取初始的軌道傾角與初始降交點地方時 所對應的軌道傾角變化率。然而事實上此二值會隨 時間不斷的變化,為了更精準描述軌道降交點地方 時的變化,必須借助數值模擬的結果。
3.2 初始軌道調整數值模擬
本研究使用美國 Analytical Graphics 公司(簡稱 AGI)所發展的系統工具箱 (Systems Tool Kit,簡稱 STK)軟體進行福衛五號軌道模擬,以了解其軌道 傾角變化對降交點地方時的影響,由這些理論與數 值結果,可以讓太空中心進一步擬定初始軌道調整
的策略。
使用 STK 軟體當中高精度軌道積分器(High Precision Orbit Propagator,簡稱 HPOP)模組,並利 用 Lagrange 7 階內插函數進行模擬,其模擬條件與 假設,如表 1 所列,其中太陽 F10.7 指數分別使用 固定值 65 和使用美國網站 CelesTrak 所提供的預測 值(Celestrak, 2016)進行模擬。
表 1 數值模擬條件與假設(NSPO, 2016) 福衛五號衛星與任務規格 1 衛星重量 430 公斤 (含燃料)
2 衛星尺寸
八角柱形 高約 2.8 公尺 外徑約 1.6 公尺。
3 推進器燃料 冷氣體 = 65 sec 4 軌道種類 720 公里圓形太陽同步軌道 5 降交點地方時 10:30A.M.~11:15 A.M.
6 任務壽命 5 年
衛星擾動模型
1 重力模型 80 階 EGM2008 模型。
2 大氣密度模型 Jacchia-Roberts 時變模型 3 F10.7 指數 (1) 65 (2)預測值 4 地磁 Kp 指數 3
5 太陽光壓系數
Cr 1
6 大氣阻力系數
Cd 2.2
7 第三體擾動 日、月
3.2.1 模擬情境
本研究模擬福衛五號位於兩個不同降交點地 方時(LTDN)的軌道變化。
情境一是降交點地方時為 11:15 A.M.,且無初 始軌道傾角偏差的情形,主要是驗證在此一情境下,
降交點地方時是否會飄移早於 10:30 A.M.。
情境二是降交點地方時為 10:30 A.M.,且有初 始軌道傾角偏差的情形。對於初始軌道傾角偏差,
首先選擇與傾角調整方式二理論計算相同的偏差 量,作為初始的模擬條件,以了解理論計算與數值 模擬的差異,理論計算的軌道傾角為 0.082°的偏差,
在此初始偏差量下,理論上福衛五號衛星在 5 年的
7
任務生命壽命內降交點地方時往先往中午方向飄 移,而後回到初始降交點地方時 10:30 A.M.。
情境三則是利用試誤法選擇一個初始軌道傾 角偏差作為初始的模擬條件,以得到一組近似於理 論計算降交點地方時變化的趨勢,這個透過試誤法 得到初始軌道傾角偏差可做為未來福衛五號初始 軌道調整時的重要參考數值。
三種模擬情境,所選取的軌道參數,如表 2 所列,而初始降交點地方時及其所選擇的初始軌道 傾角偏差,如表 3 所列。
表 2 克普勒軌道參數 (Epoch 1 Jan 2017 10:30:00 UTCG) 軌道參數 情境 1 情境 2 情境 3 軌道半長軸
(km) 7093.832 7099.675 7099.675
偏心率(deg) 0 0 0
軌道傾角
(deg) 98.273 98.3522 98.36422
近地點幅角 0 0 0
升交點赤經 90.017 78.769861 78.76986 真近點角 235.53 220 220
表 3 初始條件偏差值與降交點地方時 情境 LTDN 傾角偏差 (deg)
1 11:15 A.M. 0 2 10:30 A.M. +0.082 3 10:30 A.M. +0.0935 情境一:
初始條件,
(1) 降交點地方時為 11:15 A.M.
(2) 平均軌道傾角為 98.27°
(3) 無初始軌道傾角偏差
依據式(5),軌道傾角長期變化的初始值約 −0.1776°⁄year,在無初始軌道傾角偏差的情形下,
福衛五號衛星在 5 年的任務壽命內降交點地方時 持續往更早的方向飄移,福衛五號若是不做軌道傾 角的調整,則降交點地方時(LTDN)將會飄移到早 於 10:30 A.M.,如圖 6 所示,STK 模擬的降交點地 方時變化值大於理論值。值得一提的是,情境一初
始的軌道傾角長期變化量最小,而 5 年後傾角的改 變量也是最小,但是最後降交點地方時改變量卻是 最大的。
圖 6 降交點地方時(LTDN)的變化(情境 1) 情境二:
初始條件,
(1) 降交點地方時為 10:30 A.M.
(2) 平均軌道傾角為 98.27°
(3) 初始軌道傾角偏差 0.082°(調整方式二理論計 算得到)
降交點地方時為 10:30 A.M.的軌道傾角長期 變化的初始值約−0.0328°⁄year ,若有初始軌道傾 角偏差 0.082°,則由 STK 模擬所獲得情境二降交 點地方時變化,如圖 7 所示。
由圖 7 可以觀察出,雖然有一與理論值相同的 初始軌道傾角偏差,但透過數值模擬顯示衛星在第 48 個月就回到初始降交點地方時 10:30 A.M.,到了 第 60 個月的降交點地方時為 10:17 A.M.。這表示 在實際上所選取的初始軌道傾角偏差必須大於理 想的初始軌道傾角偏差,才能使降交點地方時的漂 移不會早於 10:30 A.M.。
圖 7 降交點地方時(LTDN)的變化(情境 2)
情境三:
初始條件,
(1) 降交點地方時為 10:30 A.M.
(2) 平均軌道傾角 98.27°
(3) 初始軌道傾角偏差 0.0935°
情境三所選擇的初始軌道傾角偏差,比情境二 大 0.0115°,將此偏差量為做為初始模擬條件,利 用 STK 進行模擬,結果顯示福衛五號在 5 年的任 務生命週期內降交點地方時一開始會往中午方向 飄移,而後又回到初始降交點地方時 10:30 A.M.,
如圖 8 所示。
圖 8 降交點地方時(LTDN)的變化(情境 3) 與理論計算結果相比,數值模擬計算得到最大 降交點地方時改變量約 14 分 49 秒,小於理論計算 的 17 分 43 秒。
以上各情境經過 5 年的模擬,平均軌道高度與 傾角 5 年的變化值,如表 4 所示,以情境一為例,
其平均軌道高度與傾角的模擬結果,如圖 9 與圖 10 所示,而其降交點的經度變化,如圖 11 所示。
F10.7 指數對於降交點地方時(LTDN)與傾角 變化的影響極微,但是對於平均軌道高度和降交點 的經度變化的影響較為明顯,因 F10.7 指數越大相 對應的大氣阻力也就越大,平均軌道高度下降(軌 道周期縮短)的速度越快,相對應的降交點的經度 變化速度也就越快(地面軌跡向東飄移)。
圖 9 軌道半長軸的變化(情境 1)
圖 10 軌道傾角的變化(情境 1)
圖 11 降交點的經度變化 表 4 5 年後的軌道平均變化值
情境 傾角變化 高度變化
(F10.7 固定)
高度變化 (F10.7 預測值) 1 -0.126。 -0.647 km -0.85km 2 -0.155。 -0.607 km -0.82km 3 -0.146。 -0.607 km -0.82km
若考慮衛星入軌精度,可以估算初始軌道調整,
包括傾角與高度,所需燃料。依據福衛五號發射服 務商的資料顯示(Space, 2015),傾角誤差為±0.1°,
9
近地點與遠地點高度誤差分別為±10公里與±15 公里。
若降交點地方時為 10:30 A.M.,最壞情況下,
入軌傾角為 98.17 (=98.27- 0.1) 度,則初始軌道傾 角調整為 98.3635 (=98.17+0.1935) 度,使得降交點 地方時維持在 10:30 A.M.至 11:15 A.M.間,而軌道 高度調整有三種情況,一是 730 公里圓形軌道轉換 到 720 公里圓形軌道,二是 710 公里圓形軌道轉換 到 720 公里圓形軌道,三是 710 × 735 公里橢圓軌 道轉換到 720 公里圓形軌道。
若降交點地方時為 11:15 A.M.,最壞情況下,
入軌傾角為 98.37 (=98.27+0.1) 度,則初始軌道傾 角調整為 98.27 (=98.37-0.1) 度,使得降交點地方 時一開始維持在 10:30 A.M.至 11:15 A.M.間,然而 後續仍須做傾角調整,否則降交點地方時將會提前 早於 10:30 A.M. (見情境一模擬結果) 。 而軌道高 度調整有三種情況,同 10:30 A.M.情形。所需燃料 如表 5 所列。
表 5 發射後初始軌道調整所需燃料 LTDN 傾角調整 高度調整 所需總燃料
10:30 A.M.
98.17。 98.3635。
730 km
720 km 21.647 kg 710 km
720 km 21.667 kg 710× 735 km
720 km 22.545 kg
11:15 A.M.
98.37。 98.27。
730 km
720 km 12.997 kg 710 km
720 km 13.011 kg 710 ×735 km
720 km 13.889 kg
3.3 軌道調整策略
福衛五號降交點地方時的變化必須維持在一 定的範圍內(10:30 A.M.至 11:15 A.M.) 。福衛五號 發射後的軌道傾角調整策略主要依衛星的起始降 交點地方時(LTDN)而定:
(1)
任務壽命範圍內維持福衛五號的降交點地方時,越靠近中午則軌道傾角的變化率越小則越節省 後續軌道維持所需燃料。
(2)
若起始降交點地方時位於 10:30 A.M.則至少增 加傾角偏差略大於+0.0935,由分析可得 5 年後 降交點地方時將回到 10:30 A.M.。(3)
若起始降交點地方時位於 11:15 A.M.則維持初 始傾角略小於或等於 98.27 度。(4)
若起始降交點地方時位於範圍內(10:30 A.M.至 11:15 A.M.),軌道傾角的調整方案,建議如下:a. 若初始傾角偏差大於零時,也就是說初始傾 角大於 98.27 度,視實際情況決定是否要執 行傾角調整,越靠近 11:15 A.M.,調整的軌 道傾角總量可以越小。
b. 若初始傾角偏差小於等於零時,也就是說初 始傾角小於等於 98.27 度,建議於早期執行 傾角調整,越靠近 10:30 A.M.,調整的軌道 傾角總量可以越大。
(5)
軌道高度依據地面軌跡位置與限定區域進行調 整,以確保地面軌跡能維持在台灣附近,基本 上軌道高度約高於 719.96 公里則地面軌跡會往 西飄,反之則往東飄。(6)
軌道高度調整量必須考慮當時的 F10.7 指數,地球的磁場指數,與軌道傾角等等參數進行估 算,依據模擬與分析,福衛五號任務週期內調 整軌道高度相較於調整軌道傾角所需耗的燃料 小很多。
4. 結論
本文分析福衛五號在不同的初始軌道接受各 種擾動的影響下,對於降交點地方時(LTDN)與地 面軌跡的變化的情況,由於不同軌道高度、傾角,
和軌道面與太陽間的不同夾角,所造成影響彼此相 依,雖然軌道傾角的變化不大,但在軌道傾角的調 整維護中卻是相當耗費燃料,而且經過長時間的誤 差累積,會導致降交點地方時遠離任務需求的範 圍。
由本文所提供的理論與模擬分析結果,可依據 任務所需提出適當的軌道傾角偏差值,搭配適當的
軌道高度偏差值,於適當的發射時間執行任務,將 可以大量節省燃料消耗和軌道維護的次數,並延長 衛星的任務壽命,並使得福衛五號降交點地方時的 變 化 維持 在一 定的 範 圍內 (10:30 A.M. 至 11:15 A.M.)。
參考文獻
張國雲、蔡立鋒、黃曉峰、楊釗,2014。近圓太陽 同步衛星軌道傾角偏差的影響和調整,上海航 天,31(2):37–41。[Zhang, G.Y., Cai, L.F., Huang X.F., and Yang, Z., 2014. Impact analysis and adjustment of nearly round sun-synchronous orbit satellite injection inclination deviation, Aerospace Shanghai, 31(2): 37-41.(in Chinese)]
楊維蓮,2008。太陽同步回歸軌道的長期演變與控 制,航天器工程,17(2):26–30。[Yang, W., 2008. Long-term evolution and control for sunsynchronous and recursive orbit, Spacecraft Engineering, 17(2): 26-30.(in Chinese)]
Capderou, M., 2006. Satellites: Orbits and Missions, translated from French by Stephen Lyle, Springer.
Celestrak. Space Weather Data, Available at:
http://celestrak.com/SpaceData/ , Accessed December 15, 2016.
Chao, C.C., 2005. Applied Orbit Perturbation and Maintenance, Aerospace Press, El Segundo, California.
Curtis, H.D., 2005. Orbital Mechanics for
Engineering Students, Butterworth Heinemann, p.265.
Dowd, L.D., and Tapley, B.D., 1979. Density models for the upper atmosphere, Celestial Mechanics, 20(3): 271-295.
Lee, B.S., 1999. Variations of the local time of ascending node for the initial inclinations of the KOMPSAT, Journal of Astronomy and Space Sciences, 16(2): 167-176.
NASA.,2016a. Debris assessment software, Orbital Debris Program Office, Available at:
https://www.orbitaldebris.jsc.nasa.gov/mitigatio n/das.html/ , Accessed December 15, 2016.
NASA.,2016b. Solar cycle prediction, Marshall Space Flight Center, Available at:
https://solarscience.msfc.nasa.gov/predict.shtml/
, Accessed December 15, 2016.
NSPO., 2016. Program description, Available at:
http://www.nspo.narl.org.tw/2011/tw/projects/F ORMOSAT-5/satellite.html/ , Accessed December 15, 2016.
Space, X., 2015. Falcon 9 launch vehicle payload user’s guide rev 2, Available at:
http://www.spacex.com/sites/spacex/files/falcon _9_users_guide_rev_2.0.pdf/ , Accessed December 15, 2016.
Wertz, J.R., and Larson, W.J., 1992. Space Mission Analysis and Design (Third edition), Microcosm.
11
1 Associate Researcher, National Applied Research Laboratories, NSPO Received Date: Sep. 06, 2016
2 Senior Engineer, National Applied Research Laboratories, NSPO Revised Date: Dec. 27, 2016
* Corresponding Author, E-mail: [email protected] Accepted Date: Feb. 03, 2017
Initial Orbit Adjustment Analysis and Strategy for FORMOSAT-5 Mission
Chuang-Wei Hsueh 1* Feng-Tai Hwang 2
Abstract
FORMOSAT-5 is the fifth space program initiated by National Space Organization (NSPO) of National Applied Research Laboratories (NARL), the Republic of China (ROC). FORMOSAT-5 will be operated in a sun-synchronous orbit at altitude of 720 km. Operating in this orbit, FORMOSAT-5 can have two-day revisit property, and can reach the goal of two-day global coverage with FOR of 45 degrees. However, the lunisolar attraction causes a slight variation in the satellite inclination, the accumulated deviation in Right Ascension of Ascending Node (RAAN) can be significant after 2 to 3 years, and the Local Time of Descending Node (LTDN) will drift out of the range of mission–required value.
Three different scenarios for different initial orbits are proposed. For each scenario, the initial orbit and the long-term evolution of FOMOSAT-5 are simulated through STK simulation. Finally, initial orbit adjustment analysis and strategy are proposed, and adding some proper inclination in the ideal orbit at the appropriate LTDN will reduce fuel use and will extend the life cycle of a satellite mission.
Keywords: FORMOSAT-5, Orbit adjustment, Orbit analysis, STK simulation
Volume 22, No.1, 2017, pp. 13-21 DOI 10.6574/JPRS.2017.22(1).2
1國家太空中心 研究員 收到日期:民國 105 年 06 月 07 日
2國立中央大學大氣物理研究所 碩士生 修改日期:民國 105 年 07 月 22 日
3國立中央大學太空科學研究所 碩士生 接受日期:民國 105 年 09 月 01 日
4國立中央大學太空遙測研究中心 副教授
5國立中央大學太空遙測研究中心 教授
* 通訊作者, 電話: 03-4227151 轉 57633, E-mail: [email protected]
福衛五號遙測儀之全球增益數研究與開發
許國賢
1林孟岳
2曾聖凱
3林唐煌
4*劉振榮
5摘要
福爾摩沙衛星二號(以下簡稱福衛二號)為我國第一枚自主作業的遙測與科學用途之高空間解析度衛 星,其搭載之遙測光學酬載為遙測照相儀(Remote Sensing Instrument, RSI),具有 8 米的高空間解析和 8 位元之輻射解析度。福爾摩沙衛星五號(以下簡稱福衛五號)擁有與福衛二號相似之多頻譜波段的遙測照相 儀且具較高之 12 位元輻射解析度,為接續福衛二號之觀測任務。與一般高解析光學感測器不同,遙測照 像儀擁有調整輻射動態範圍之功能,以提升高反射及低反射地區整合觀測之能力,即根據地表的反射特 性調整動態量程(Dynamic Range)之增益數(Gain Factor),以避免高反射率地區出現灰階值飽和情形,並可 加強低射率地區的訊噪比。因此,本文根據 MODIS(Moderate-Resolution Imaging Spectroradiometer)所提 供之全球地表反射率產品(MOD09),結合太陽之幾何參數與福衛二號及福衛五號之光學特性,應用輻射 傳送模式 6S(Second Simulation of a Satellite Signal in the Solar Spectrum)分別計算福衛二號及福衛五號在 大氣層頂所觀測的輻射率,配合 RSI 儀器之輻射轉換模式,建構福衛二號及福衛五號之全球增益數分布 圖,以提供動態量程選用之參考依據。以福衛二號 RSI 的驗證結果顯示,本文所建構之全球增益數分布 與現行之增益數分布,於陸地部分及部分頻段之海洋區域具有相近趨勢,顯示此方法具可行性。而在福 衛五號之全球增益數反演結果方面,海洋、陸地和極區分別為四、二、一,與實際地表反射狀態相當穩 合,顯示此法將可有效地提供未來福衛五號全球增益數之設置與選用參考,進而提升取像之成功率。
關鍵字:福衛二號、福衛五號、遙測照相儀、動態量程、增益數、全球地表反射率
1. 前言
對於搭載光學感測器之遙測衛星而言,空間、
光譜與輻射解析度為其重要規格指標。空間解析度 定義為該感測器對目標進行空間上取樣之最小單 位;光譜解析度則是指其所使用之光譜頻道數量與 對應之頻寬;而輻射解析度表示該感測器或是影像 於量化輻射能量之能力。然而此三項不同面向之解 析度難以兼得,以具高空間解析度者為例,為追求 極大之訊噪比,需使用較寬之頻寬;且需極大空間 儲存空間上之資訊,故其能使用之灰階值相當有限,
造成以高空間解析為主要目的者,得於其它解析度
上進行妥協。為突破此一限制,增進對不同反射率 目標取像成功率,部份衛星感測器採用動態量程,
如美國國家航空暨太空總署(National Aeronautics and Space Administration, NASA) 之 Landsat-7 所 搭載之 ETM+(Enhanced Thematic Mapper Plus)感 測器,具備高低兩種增益,可針對不同地表區域進 行切換,以最大化其 8 位元之輻射解析度。
福衛二號所搭載之光學遙測酬載為遙測照相 儀,於全色態頻道具兩公尺空間解析;於多光譜頻 道則為八公尺空間解析。而其產品具 8 位元輻射解 析度。為增進其應用領域,該光學遙測酬載具備十 種不同之增益數(Gain Number)供選用(整數一至
14
十),以利高反射及低反射地區之整合觀測。福衛 五號,其所搭載之遙測照相儀於多光譜頻道特性與 福衛二號相近,但空間解析度提升為四公尺;全色 態頻道頻寬較福衛二號窄,空間解析度仍為兩公尺。
其輻射解析度為 12 位元,具備三種不同增益數(一、
二、四)。
增益數的設置除了避免影像飽和之情形,亦可 最大化感測器上輻射解析度之應用,提升該感測器 在分辨細微反射率變化之能力。在高反射率地區,
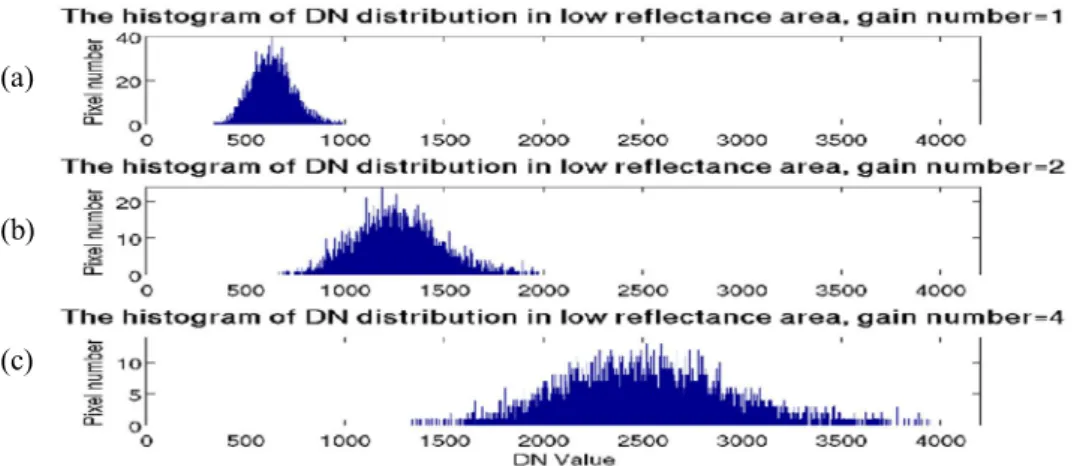
為避免輸出之灰階值達到飽和,需設置較低之增益 數(如圖 1);低反射率地區,可選取較高之增益數 (如圖 2),以便最大化感測器之輻射解析度應用,
提升分辨低反射率地區之間些微反射率變化之能 力。如無配合欲觀測地區設置不同之增益數,則會 限制資料之使用性及應用。如過去福爾摩沙衛星一 號 搭 載 之 海 洋 水 色 照 相 儀 (Ocean Color Image, OLI),其主要任務為提供海洋各相關領域之量測資 料,因此在未搭配動態量程之情形下,於高反射率 地區觀測時,如極區地區,出現影像灰階值飽和之 現象,因而限制了影像資料之應用範圍。
所以,對於較低輻射解析度之衛星,如福衛二 號及福衛五號搭載之遙測照相儀,如能建構其全球 增益值分布,則可增加其影像於全球之適用性。然 而,增益值之建構,於前人之研究相當稀少。如 Landsat-7 使用者手冊(Irish, 2000)指出,Landsat-7 所使用之增益主要取決於欲觀測地區之地表物種 類及太陽照射幾何,並以灰階飽和值之 95%為標準,
進行增益數選取。
因此,本研究嘗試透過輻射傳送模式(Second Simulation of a Satellite Signal in the Solar Spectrum, 6S)模擬全球大氣層頂輻射率,並考量 Landsat-7 使 用者手冊提及之兩個參數:地表反射率及太陽照射 幾何。全球之地表反射率分布,使用 MODIS 地表 反射率產品,因 MODIS 感測器每日再臨同一地區 之特性,適合用以獲得大範圍且大量之可用反射率 資料,且考慮太陽照射幾何對於大氣層頂輻射率之 影響。
輻 射 傳 送 模 式 6S 為 Vermote 等 人 基 於 Laboratoire d’Optique Atmosphérique 所開發的 5S (Simulation of a Satellite Signal in the Solar Spectrum, 5S)輻射傳送模式,在 1997 年發展出的 新版本模式(Vermote et al., 1997; Vermote et al., 2006),為國際上較為通用的大氣校正模式,亦被 用於計算 MODIS 大氣校正演算法所需要之查找表 (Look-up Table)。其可計算的頻譜範圍介於可見光 及近紅外頻段(0.25-4.0μm),頻譜解析度為 2.5nm,
且能透過輸入大氣參數、環境參數、觀測幾何參數 及感測器之光學特性,模擬大氣層頂之儀器觀測輻 射率,或進行大氣校正反演地表反射率。
本文藉由全球大氣層頂輻射率的模擬,推算適 合福衛二號之全球增益數分布,並與現行使用之全 球增益數分佈進行比較,以驗證此方法之可行性,
並提供福衛五號升空後全球增益數分布之設置建 構,期望提升影像品質,增進相關產品與資料之應 用。
圖 1 六月高反射地區之福衛二號藍光頻道模擬灰階值分布 (a)增益數=1 (b)增益數=2 (c)增益數=4 (a)
(b)
(c)
圖 2 六月低反射地區之福衛二號藍光頻道模擬灰階值分布 (a) 增益數=1 (b) 增益數=2 (c) 增益數=4
2. 資料來源及處理
輻射傳送模式可模擬各月份之模擬福衛二號 及福衛五號全球大氣層頂輻射率,參考 Landsat-7 使用手冊 (Irish, 2000)增益數設置提及之參數,需 考量遙測照相儀各頻道下之地表反射率及全球各 緯度下之太陽照射幾何參數,且假設無氣膠散射之 影響及地表情況皆為蘭氏面,即忽略 MODIS 感測 器與遙測照相儀觀測角度差異造成之影響。並以現 行福衛二號所使用之全球增益數考慮之衛星觀測 幾何皆為垂直觀衛測為參考,本研究考量之福衛二 號及福衛五號衛星觀測幾何為垂直觀測。
2.1 太陽照射幾何
大氣層頂輻射率受太陽照射強度影響,即受太 陽照射幾何變化影響。本研究嘗試透過美國大氣暨 海 洋 總 署 (National Oceanic and Atmospheric Administration) 下 地 球 系 統 研 究 實 驗 室 (Earth System Research Laboratory)所開發之太陽位置計 算機,進行各緯度下,衛星經過時之各個月份的太 陽照射幾何計算(如圖 3 及圖 4),其中包含太陽之 天頂角與方位角。
圖 3 太陽方位角隨緯度之變化。其中綠線顯示為 春天;紅線顯示為夏天;橘線顯示為秋天;
藍線顯示為冬天
圖 4 太陽天頂角隨緯度之變化。其中綠線顯示為 春天;紅線顯示為夏天;橘線顯示為秋天;
藍線顯示為冬天 (a)
(b)
(c)
16
2.2 MODIS 地表反射率產品
MODIS 為裝載在 Terra 及 Aqua 之感測器,由 於其每日再臨同一地區之特性,且其地表反射率產 品為已經過大氣校正後之產品,適合用以獲取全球 之地表反射率。本研究收集 2014 年各月份之藍、
綠、紅與近紅外頻道之每日全球地表反射率產品 MOD09CMG,並取其月平均(如圖 5 所示),及修 補因雲造成之缺漏值,獲得各月份之全球平均地表 反射率。
3. 研究方法
本研究使用月平均並填補缺漏值之每月地表 反射率加上對應太陽幾何參數,透過輻射傳送模式,
可模擬福衛二號與五號於大氣層頂所觀測之輻射 率(如圖 6)。
(a) (b)
(c) (d)
圖 5 2014 年之 MODIS藍光頻道全球地表反射率,
顏色對應為反射率 (a) 三月 (b) 六月 (c) 九月 (d) 十二月
(a) (b)
(c) (d)
圖 6 2014 年之福衛二號藍光頻道大氣層頂輻射率,
顏色對應為輻射率,單位為W
(a) 三月 (b) 六月 (c) 九月 (d) 十二月
而福衛二號之輻射轉換模式如下式 (1) (Lin et al., 2009):
( ) = ( ) × + + (0) ... (1)
其中 ( )為感測器觀測之輻射率所對應之輸 出灰階值; 為輻射轉換係數; 為動態增益。
為 感 測 器 觀 測 頻 段 下 之 大 氣 層 頂 輻 射 率 (w- - - ; 為儀器中,各感測器元素間 等化係數; 為雜訊; (0)為觀測儀器自身暗電流 對於輸出灰階值之貢獻量。
假設福衛五號之輻射轉換模式與福衛二號相 似,其唯一之差別在於兩者之動態增益。福衛二號 之動態增益由其十個增益數(一至十之整數)決定 十種不同之增益;而福衛五號之動態增益僅為三個 值(一、二、四)。透過轉換模式之推導,可得到福 衛二號之增益數與福衛五號動態增益之定義如下 式(2)及式(3):
2 ( )
∗ + 1 ≥ ... (2)
( )
∗ ≥ j ... (3)
式(2)為福衛二號之增益數計算方程式,式(3) 為福衛五號之增益數計算方程式。將前述所推算出 之大氣層頂輻射率與 95%之飽和灰階值代入,即可 換算出全球對應最大之增益數(圖 7)。
圖 7 全球各月份增益數之建構流程圖
4. 結果與討論
驗證結果(圖 8 至圖 11)顯示各頻道下大部分陸 地反演結果與現行使用之全球增益具相同趨勢,但 部分增益數仍可差達二。極區部分之增益數差值較 大,差值可達五,即反演結果皆遠小於現行使用之 增益數,如三月之南北極區域、六月之北極區域、
九月及十二月之南極區域。藍光及綠光頻段之海洋 區域之增益數,相對而言有較好之結果,大部分區 域之增益數介於正負一,然而紅光及近紅外光頻段 之增益數反演結果皆大於現行使用之增益數,差值
可達負三。此外,於南緯二十度之海洋區域,福衛 二號現行之增益數設定為一或二,亦即此區域有極 高之反射率,與 MODIS 感測器觀測之較低地表反 射率不同,因此造成此區域有也有較大之差異,差 值可達負五,此部分差異原因,尚待釐清。
整體而言,相對於現行使用之增益數,反演之 增益數在極高及極低反射率地區皆有較大的增益 數差異,如極區及海洋區域。其餘區域,如陸地及 部分海洋區域,則有相近之結果。
應用此方法於福衛五號全球增益數分布之反 演,結果如圖 12 至圖 15 顯示,大部分之反演結果 於海洋地區為四;陸地區域大部分為二;極區為一。
然而福衛五號九月及十二月之全球增益數分布,於 北半球之分佈值設置為四;少部分高反射率地區,
如極區、北非沙漠區域及中東乾燥區域設置為二;
南半球之分佈,部分低反射率地區,如海洋區域,
增益數設置為二。
整體而言,福衛五號全球增益數分布反演結果,
符合高反射區域使用低增益數;低反射區域使用高 增益數之特性。
(a) (b)
(c) (d)
圖 8 福衛二號藍光頻道之全球增益數差值,此差 值為現行使用之增益數減去反演增益數 (a) 三月 (b) 六月 (c) 九月 (d) 十二月
18
(a) (b)
(c) (d)
圖 9 福衛二號綠光頻道之全球增益數差值,此差 值為現行使用之增益數減去反演增益數 (a) 三月 (b) 六月 (c) 九月 (d) 十二月
(a) (b)
(c) (d)
圖 10 福衛二號紅光頻道之全球增益數差值,此差 值為現行使用之增益數減去反演增益數 (a) 三月 (b) 六月 (c) 九月 (d) 十二月
(a) (b)
(c) (d)
圖 11 福衛二號近紅外頻道之全球增益數差值,此 差值為現行使用之增益數減去反演增益數 (a) 三月 (b) 六月 (c) 九月 (d) 十二月
(a) (b)
(c) (d)
圖 12 福衛五號藍光頻道之全球增益數分佈。其模 擬之衛星觀測幾何為垂直觀測 (a) 三月 (b) 六月 (c) 九月 (d) 十二月
(a) (b)
(c) (d)
圖 13 福衛五號綠光頻道之全球增益數分佈。其模 擬之衛星觀測幾何為垂直觀測 (a) 三月 (b) 六月 (c) 九月 (d) 十二月
(a) (b)
(c) (d)
圖 14 福衛五號紅光頻道之全球增益數分佈。其模 擬之衛星觀測幾何為垂直觀測 (a) 三月 (b) 六月 (c) 九月 (d) 十二月
(a) (b)
(c) (d)
圖 15 福衛五號近紅外頻道之全球增益數分佈。其 模擬之衛星觀測幾何為垂直觀測 (a) 三月 (b) 六月 (c) 九月 (d) 十二月
5. 結論
本研究發現,以 MODIS 地表反射率配合對應 太陽幾何,透過 6S 所模擬出之福衛二號全球增益 與現行使用之增益數相當接近,代表本方法在大部 分陸地區域及藍光與綠光頻段之海洋區域具極高 之可行性。然而,部分陸地地區及極地地區之差值 有偏高之現象,其可能由於兩者使用之地表反射率 資料之差異造成,可藉由定期的資料更新獲得解 決。
福衛五號部分,由於考慮不同月份太陽幾何變 化之影響,於九月及十二月時,北半球為斜射,南 半球為直射。因此,福衛五號九月及十二月之全球 增益數分布,於北半球之分佈值設置為 4;少部分 高反射率地區才設置為 2;南半球之分佈,部分低 反射率地區,增益數設置為 2。
整體而言,福衛五號全球增益數分布反演結果 於海洋地區為四;陸地區域大部分為二;極區為一,
符合高反射區域使用低增益數;低反射區域使用高 增益數之特性。
未來,將應用此方法於福衛五號之全球增益數 之設置建議,以提升取像成功率,除可克服地表高
20
低反射差異之限制,亦將增進後續衛星影像應用之 層級。
參考文獻
Irish, R. R., 2000. Landsat 7 science data user's handbook, Report 430-15-01-003-0, National Aeronautics and Space Administration.
Lin, T.H., and Liu, G.R., 2009. In-orbit radiometric calibration of the FORMOSAT-2 RSI, Terrestrial Atmospheric and Oceanic Science, 20(6):833-838.
Vermote, E.F., Tanré, D., Deuze, J.L., Herman, M., and Morcette, J.J., 1997. Second simulation of the satellite signal in the solar spectrum, 6S: An overview, IEEE Transactions on Geoscience and Remote Sensing, 35(3):675-686.
Vermote, E., Tanré, D., Deuzé, J.L., Herman, M., Morcrette, J.J., and Kotchenova, S.Y., 2006.
Second simulation of a satellite signal in the solar spectrum-vector (6SV), 6S User Guide Version 3, November 2006, pp.1-55.
1 Research Fellow, National Applied Research Laboratories, NSPO Received Date: Jun. 07, 2016
2 Master Student, Dept. of Atmospheric Sciences, National Central University Revised Date: Jul. 22, 2016
3 Master Student, Graduate Institute of Space Science, National Central University Accepted Date: Sep. 01, 2016
4 Associate Professor, Center for Space and Remote Sensing Research, National Central University
5 Professor, Center for Space and Remote Sensing Research, National Central University
* Corresponding Author, Tel: 886-3-4227151 ext. 57633, E-mail: [email protected]
Global Gain Map Generation For Formosat-5 RSI Observations
Kuo-Hsien Hsu 1 Meng-Yue Lin 2 Sheng-Kai Zeng 3 Tang-Huang Lin 4* Gin-Rong Liu5
Abstract
FORMOSAT-2 (FS-2) is the first operational remote sensing satellite of the National Space Organization (NSPO) for science in Taiwan. The Remote Sensing Instrument (RSI), with high spatial resolution (8m) and 8-bits radiometric resolution, is the primary payload of FS-2. FORMOSAT-5 (FS-5) RSI has the similar spectral bands and bandwidths to FS-2 RSI but better radiometric resolution (12-bits) and spatial resolution in multispectral bands (4m). To fit the large fluctuation of surface reflectivity, an option of selecting gain factor is designed for the proper dynamic range of radiometric signal. When observing a high reflectivity region, the lower gain number should be selected to avoid the possible saturation of output signal, while a larger gain number would be favorable for a low reflectance region to enhance the signal to noise ratio (S/N Ratio).
Therefore, the objective of present research is to generate global gain number of each spectral band for RSI FS-2/FS-5. For this topic, the Moderate-Resolution Imaging Spectroradiometer (MODIS) global surface reflectance product (MOD09) associated with solar geometry and Second Simulation of a Satellite Signal in the Solar Spectrum, (6S, a radiative transfer code) are employed to derive the reflected radiance in each spectral band at the top of atmosphere. With the radiometric coefficients of RSI, the maps of global gain number can be constructed accordingly. The generated gain number maps of FS-2 RSI agree with the operational maps of National Space Organization (NSPO) in most land areas and some marine areas. The results of FS-5 RSI also conform well to the criteria of gain setting in the areas of land, ocean and polar region in terms of surface reflectivity. The overall result suggests that the global gain maps generated in this study can competently offer the setting of FS-5 RSI gain number for the global observation after launched.
Keywords: Formosat-5, Formosat-2, Dynamic range, Gain factor, RSI, Global surface reflectance
1 23-31 106 3 23 Journal of Photogrammetry and Remote Sensing
Volume 22, No.1, 2017, pp. 23-31 DOI 10.6574/JPRS.2017.22(1).3
1國家實驗研究院 國家太空中心飛行控制組 副研究員 收到日期:民國 104 年 12 月 15 日
2國家實驗研究院 國家太空中心飛行控制組 研究員 修改日期:民國 105 年 05 月 03 日
* 通訊作者, E-mail: [email protected] 接受日期:民國 105 年 05 月 18 日
福衛五號姿態與軌道系統硬體之極性驗證與測試
魏瑋廷
1*葉明宇
1詹英文
2摘要
衛星的姿態與軌道控制系統(AOCS)用於保持姿態軸的穩定、控制衛星本體的轉向以及軌道的調整,
是衛星中最複雜的系統,需要使用許多不同功能的感測器(Sensor)來判定姿態,透過複雜的演算法與大量 的計算,經由致動器(Actuator)輸出以控制姿態。
如前述,AOCS 是如此高度整合機械、電氣與控制的複雜系統,其中硬體極性錯誤常常是造成衛星 失去控制,甚至最終導致任務失敗的原因,所以在每一環節確保極性正確格外顯得重要。本篇文章主要 簡介福衛五號(FS-5) AOCS 硬體極性驗證測試,針對不同元件的特性進行適當的規劃與測試設計,並敘述 最終測試與分析結果。
關鍵字:極性、姿態控制、衛星整合測試
1. 簡介
福爾摩沙五號衛星(FORMOSAT-5, FS-5)為一 顆將運行在太陽同步軌道上的遙測衛星,而其姿 態與軌道控制次系統(AOCS)設計為一個相當精巧 與複雜的三軸穩定控制系統,主要目的為維持衛 星在軌道上以穩定的姿態運行以及精準控制衛星 本體的轉向以達任務操作需求。
為應付 FS-5 任務中各個階段不同的需求,
AOCS 配備了許多不同功能之感測器(Sensor)用以 判定姿態,其中包含量測地球磁場向量資料的磁 力計(Magnetometer, MAG)、提供太陽方向的全方 位太陽感測器(Omni-directional Sun Sensor, OSS)、
提供衛星姿態資料的追星儀(Star Tracker, STR)、
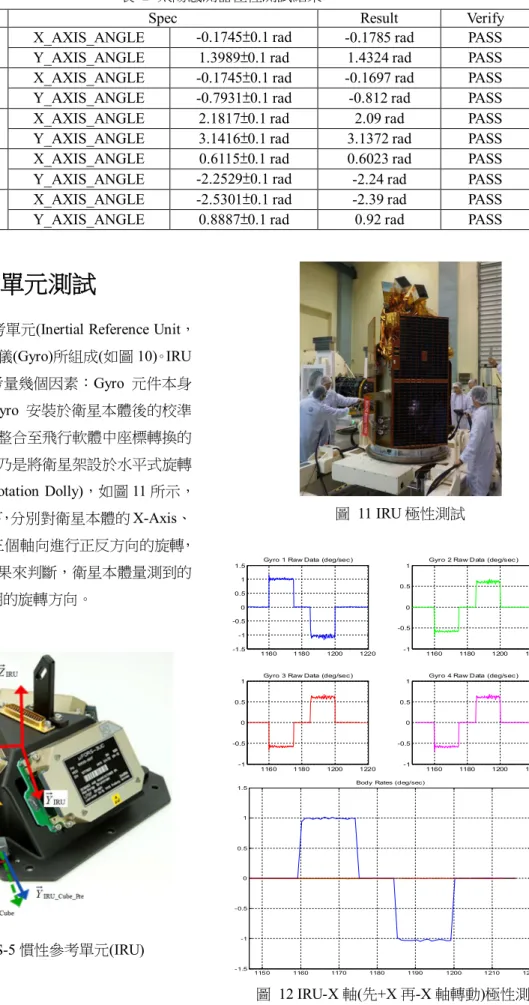
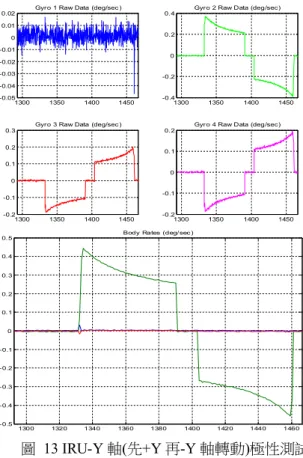
提供衛星位置、速度與時間等資料的全球定位接 收機(GPS Receiver, GPSR)以及提供衛星角速度的 陀螺儀(Gyro)。AOCS 也裝設不同功用之致動器 (Actuator),採用了以反應輪(Reaction Wheel, RW) 為主,再加上磁力棒(Magnetic Torquer, MTQ)為輔 的姿態控制致動器,而在軌道推進控制上則採用
四根推進器來提供轉換軌道所需的推力。
如前文所述,AOCS 於衛星系統中佔有非重 要的地位,若發生錯誤,往往對於衛星造成重大 的傷害,甚至會失去整顆衛星,故 AOCS 的硬體 系統驗證格外不可輕忽。一般 AOCS 硬體系統驗 證包含功能、性能以及極性等三種測試(Casasco et al., 2014)。在衛星整合測試階段,功能測試主要 目的為驗證硬體功能是否如預期,例如測試反應 輪運作是否能達到正常操作轉數、太陽感測器是 否能對光能量有反應……等等,為確認 AOCS 硬 體健康狀態最有效率的方式。性能測試則是進一 步測試並分析硬體系統的特性,例如反應輪轉數 與摩擦力的關係、太陽感測器對光能量反應的靈 敏度等等,目的為驗證 AOCS 硬體效能。而極性 測試主要目的為驗證硬體輸出的訊號與控制系統 所預期的指向(正負值、座標方位)是否一致,以 確保控制運算的正確性 (Stone, 1996)。
2. 極性驗證策略與分析
硬體極性是 AOCS 硬體系統驗證中最基本也 是最不可或缺的一環,因硬體極性錯誤常常被忽
略,而往往是造成衛星失去控制的主要原因,例 如 美 國 NASA 於 2001 年 發 射 的 TIMED (Thermosphere, Ionosphere, Mesosphere, Energetics and Dynamics)衛星,在發射後出現衛星角動量異 常持續增加之錯誤警告,經除錯後確認為控制器 中極性正負號錯誤造成,事後檢討是因在地面測 試時未做完整的極性驗證而導致此錯誤未被及早 發現(Dennehy et al., 2008)。
FS-5 AOCS 硬體極性驗證策略可劃分為三大 類型(如圖 1),第一種為硬體安裝檢視,在衛星整 合測試階段,飛行硬體安裝於衛星後,AOCS 工 程師依據硬體規格書以及衛星設計圖,審查並確 認硬體元件安裝的位置和軸向與設計相符。例如 RW 需特別注意原廠轉向標示以及轉子軸向是否 與設計相符(如圖 2);太陽感測器安裝方位是否與 設計一致(如圖 3);GPSR 天線方位確認(如圖 4) 的主要目的在於確認,在 GPS 天線安裝完成後,
其天線的指向相對於衛星本體座標是否指向到正 確方面,以致於隨著衛星姿態的變換還能接收得 到 GPS 信號等。此階段工作看似簡單,卻是極性 驗證工作中最基本也是最容易被忽略的部分,在 FS-5 硬體極性安裝審查即發現過 MTQ 正負軸安裝 相反之問題,此問題若無法及早發現修正,必定 造成後續衛星整合測試失敗,同時增加除錯之困 難度。
圖 1 FS-5 AOCS 硬體極性驗證策略架構
圖 2 FS-5 反應輪安裝檢視分析
圖 3 FS-5 太陽感測器安裝方位審查分析
圖 4 FS-5 導航接收機天線方位驗證分析
第二種為硬體元件的單元功能極性驗證。在 硬體安裝於衛星之前,於 NSPO 實驗室內執行硬 體單元的功能測試,直接量測硬體的訊號,確認 其極性表現與元件規格相符。除此之外,於飛行 硬體完成安裝於衛星後也必須執行硬體元件的功 能測試,透過衛星遙測資料(Telemetry data, TM)來 確認,此階段測試架構增加了飛行軟體(FSW)層,
可驗證經過 FSW 處理(如座標轉換)後之極性是否 符合預期。最後一種為硬體端對端(End to End)極 性功能驗證,由感測器端量測訊號,經過 FSW 後
25
產生控制指令由致動器輸出,驗證整體控制路徑 極性是否與設計一致。以下將介紹 FS-5 AOCS 幾 個具代表性硬體的單元與 End to End 功能極性驗 證測試。
3. 極性驗證測試設計與結 果
3.1 反應輪極性測試
反應輪為姿態控制最主要的驅動元件,NSPO 於福衛二號衛星整合測試階段時,曾經發現反應 輪極性安裝錯誤之問題(林辰宗,2010),幸而及 早發現而更改控制參數於以補救,避免發射後衛 星完全無法控制而導致衛星失效的致命災難。為 避免元件組裝後才發現極性問題時,僅能使用更改 控制方式去解決,FS-5 反應輪(RW)於元件單元測 試時,即設計一低摩擦力之旋轉平台(如圖 5),利 用轉動慣量守恆原理來驗證 RW 之極性。如表 1 所示,當控制 RW 控制(RW Cmds)轉子方向為順時 針(CW)時,轉動平台(Platform)則如預期產生反時 針(CCW)的轉動勢,反之亦然,測試結果符合預 期。
圖 5 反應輪極性驗證平台
表 1 反應輪極性測試結果 RW
Cmds
Platform Physical
Rotation Verify
CW CCW PASS
CCW CW PASS
3.2 磁力計極性測試
針對磁力計的極性測試,一般皆使用量測地 球磁場的方式來驗證(Anderson et al., 2007)。於 FS-5 磁力計元件單元功能測試時,我們使用一校 正過的精密磁力計,其軸向完全對準於 FS-5 磁力 計(MAG),經測試比對後確認兩者量測地球磁場 一致以驗證 MAG 本體極性正確。
圖 6 磁力計極性單元測試
因 FS-5 MAG 安裝於衛星側板上,其軸向並 未對準衛星本體座標,故需經由飛行軟體(FSW) 進行座標轉換為本體座標方位後方能予控制器使 用。而衛星整合測試階段的 MAG 極性驗證同樣也 是使用精密磁力計架設於 MAG 安裝位置的背板處,
其軸向也完全對準 FS-5 MAG,其量測值轉換為 衛星本體座標後與 FSW 的 MAG 讀值做比對,如 此可同時驗證 FSW 中轉換座標是否正確,如圖 7 所示,此測試結果驗證 FS-5 MAG 的極性與座標 轉換結果符合預期。
圖 7 磁力計極性測試於衛星整合階段
3.3 太陽感測器極性測試
FS-5 太 陽 感 測 器 (OSS) 由 六 組 太 陽 能 晶 片 (Solar Cell)所組成,其擺放方位如圖 8 所示,OSS1 至 OSS4 沿著衛星本體 X 軸傾斜 10 度,而 OSS5 與 OSS6 為正對 X 軸擺放設置。
FS-5 OSS 主要提供太陽方向予控制器計算出 衛星太陽能板方位與太陽方向之誤差角(αx、αy, 如圖 8 所示),而控制器會依此誤差角去做控制判
斷。在 FS-5 OSS 極性測試策略上,我們使用模擬 太陽光的鹵素燈,輪流從五個不同方向照射衛星本 體,模擬五個不同方位的太陽光源(如圖 9 所示),
之後檢驗 FSW 控制器所計算出的αx、αy方向角 是否如預期,如此可驗證從 OSS 感測器端量測至 終端 FSW 控制器路徑上之極性、座標轉換是否與 設計相符。如表 2 所示,FS-5 OSS 極性測試結果 皆符合預期。
圖 8 太陽誤差角分析
圖 9 模擬太陽光源之方向分析