國 立 交 通 大 學
機 械 工 程 學 系
碩
士
論
文
幾何形狀對微混合現象影響之研究
Experimental Investigation of Geometrical
Effects on Micro Mixing
研 究 生:黃柏誠
指導教授:吳宗信 博士
幾何形狀對微混合現象影響之研究
Experimental Investigation of Geometrical
Effects on Micro Mixing
學生:黃柏誠
Student:Po-Cheng Huang
指導教授 : 吳宗信 博士
Advisor:Dr.Chong-Sin Wu
國立交通大學 機械工程學系 碩士論文 A ThesisSubmitted to Department of Mechanical Engineering College of Engineering National Chiao Tung University
In Partial Fulfillment of the Requirements For the Degree of
Master of Science In
Mechanical Engineering July 2004
Hsinchu, Taiwan, Republic of China
幾何形狀對微混合現象影響之研究
學生:黃柏誠 指導教授 : 吳宗信 博士
國立交通大學機械工程學系
摘要
本研究著重於被動式微混合器在微混合現象之探討,利用微機電技術與 PDMS 高分子材料為結構,設計出有別於其他文獻上之微混合器,並改變其各項 參數,找出在極低雷諾數下即能產生良好混合效果的設計。我們在 Re=1000Pe 的原則下,首先,我們設計出三種長度、深度、寬度均相同的蛇狀流道,90 度 轉角、60 度轉角以及半圓形流道,在 Re=0.01 到 Re=10 的情況下來做比較,結 果發現,60 度轉角的蛇狀流道比起其他兩者有著明顯的擴散效果,而此擴散效 果在雷諾數越低的情況下越明顯,接下來我們再設計出兩種不同的流道來做比 較,分別是方形與三角形流道,在相同的條件下來進行拍攝,其結果顯示也是三 角形流道會有較良好的擴散效果,最後,我們選擇以三角形流道為基礎,做出了 3D 流道,分別在 Re=0.01,0.1,1 下來做觀察,發現兩流體在流道出口處均有 相當好的混合效果。 本文除了提出了此種新型微混合器的設計方法原則,同時建立了完整的實驗 方法與設備,更進一步說明了此微混合器的可行性。將來可運用在積體電路或其 他為流體元件,將其整合於晶片上,成為低成本的微機電流體系統。致謝
在念交大的兩年碩士生涯中,首先,先要感謝的是吳宗信老師的指導跟訓 練,讓我在實驗上遇到困難時適時的給予方向與協助,讓我能夠在這求學的兩年 順利的完成學業。 感謝卲雲龍學長的悉心指導,帶領我進入半導體實驗的這塊領域,由於他的 專業能力非常的足夠,使得我在學習時能夠事半功倍,很快的就進入狀況,而在 平時,不論是在課業或是待人處事,都給我相當大的幫助與建議,可以說是一位 亦師亦友的學長,能夠在就讀碩士班的這段期間遇到學長,我只能說是一件非常 幸運的事,而我能夠順利的畢業,絕大部分的功勞均要歸於紹雲龍學長。 此外,還要感謝奈米所的蕭文宏同學,感謝他能夠陪著我在南科實驗時,一 起熬過每個做實驗的夜晚,沒有我們互相的激勵對方,相互的幫助,我想要我一 個人在無塵室內,穿著難過的無塵衣,要熬過做實驗的日子,想必是難上加難的。 接下來要感謝的是中正大學的王少君老師以及佳瑜的幫助,沒有他們提供我 實驗所需要的儀器,我想,實驗的成品未必能夠順利的完成,真的非常感謝她們。 而在碩班的這兩年,當然要謝謝陪著我度過這段求學過程的好同學們,東 霖、立軒以及姝吟,沒有你們的陪伴,碩一時的每次考試,以及在準備口試時的 挑燈夜戰,要靠我自己一個人獨撐下去,不知道會是什麼結果,此外,實驗室的 其他學長姐們,祐霖、坤樟、國賢、又永、允民、欣芸、哲維等,謝謝你們在這 段時間內帶給我的歡樂與幫助,真的非常感謝你們。 最後,要感謝爸爸媽媽,謝謝你們以我為榮,謝謝你們能夠做我最後一道的 後盾,能夠讓我沒有後顧之憂,讓我可以全心全力的致力於課業上,順順利利的 從交大畢業,謝謝你們!目錄
摘要... II 致謝...III 目錄...IV 圖目錄... V 1. 序論...1 1.1 研究動機與目的...1 1.2 文獻回顧...3 1.2.1 主動式微混合器(active mixing) ...3 1.2.2 被動式微混合器(passive mixing)...4 2. 製程及實驗方法...6 2.1 實驗設備...6 2.1.1 光學桌...6 2.1.2 銑床位移平台...6 2.1.3 x-y-z位移平台 ...6 2.1.4 注射幫浦(KDS250)...6 2.1.5 相機...7 2.1.6 轉接環...7 2.1.7 顯微物鏡組...7 2.1.8 µ-PIV...7 2.2 流道設計...8 2.3 製程...10 2.3.1 底片式光罩繪製及製作...10 2.3.2 Wafer與載波片之清潔 ...10 2.3.3 微影技術... 11 2.3.4 PDMS微混合器製作方式...12 2.3.5 接合技術...13 2.4 實驗方法與步驟...14 3. 實驗結果及討論...15 3.1 2D微混合器混合結果比較...15 3.1.1 相同轉折數下之灰階值比較...15 3.1.2 相同距離下之灰階值比較...16 3.1.3 以μ-PIV拍攝之結果與討論...18 3.2 3D微混合器混合情形...19 4.結論...21 5.未來展望...22 參考文獻...23圖目錄
圖 1-1,Miyake等人設計之混合器。 ...24 圖 1-2,Vibbu Vivek等人設計出一聲波混合器。 ...24 圖 1-3,Oddy M. H.等人所設計之微混合器。...25 圖 1-4,Lee等人所設計之微混合器。 ...26 圖 1-5,Suzuki和Ho等人所設計之微混合器。 ...26 圖 1-6,Hao Chen等人提出之微混合器。 ...27 圖 1-7,Liu等人設計之微混合器。...27 圖 1-8,Bertsch等人設計之微混合器結構圖。 ...28 圖 1-9,Abraham D. Stroock等人設計之微混合器結構上視圖。 ...28 圖 1-10,Re與Pe之關係圖。...29 圖 1-11,實驗所設計流道之Re與Pe關係圖。 ...30 圖 2-1,製作完成之光罩圖。 ...31 圖 2-2,濕式蝕刻清洗系統(Wet bench)。...31 圖 2-3,旋乾機。 ...32 圖 2-4,自動化光阻塗佈及顯影系統(Track)。 ...32 圖 2-5,光罩對準曝光系統(Mask aligner)。...33 圖 2-6,曝光顯影示意圖。 ...33 圖 2-7,反應式離子蝕刻系統(STS-RIE)。...34 圖 2-8a,PDMS打氧電漿之前,接觸角為 91.2 度。...35 圖 2-8b,PDMS打氧電漿之後,接觸角為 1.5 度。 ...35 圖 2-9a,載波片打氧電漿之前,接觸角為 81.5 度。 ...36 圖 2-9b,載波片打氧電漿之後,接觸角為 20 度。 ...36 圖 2-10,流場拍攝儀器。 ...37 圖 3-1a,90 度轉角微混合器。 ...37 圖 3-1b,60 度轉角微混合器。 ...38 圖 3-1c,半圓形微混合器。 ...38 圖 3-2a,90 度轉角微混合器Re=0.01。 ...39 圖 3-2b,90 度轉角微混合器Re=0. 1。...40 圖 3-2c,90 度轉角微混合器Re=1。 ...41 圖 3-2d,90 度轉角微混合器Re=10。...42 圖 3-3a,60 度轉角微混合器Re=0.01。 ...43 圖 3-3b,60 度轉角微混合器Re=0.1。...44 圖 3-3c,60 度轉角微混合器Re=1。 ...45 圖 3-3d,60 度轉角微混合器Re=10。...46 圖 3-4a,半圓形微混合器Re=0.01。 ...47圖 3-4b,半圓形微混合器Re=0.1。...48 圖 3-4c,半圓形微混合器Re=1。 ...49 圖 3-4d,半圓形微混合器Re=10。...50 圖 3-5a,90 度轉角微流道,Re=0.01,於各個不同轉角處之灰階值比較圖。...51 圖 3-5a,90 度轉角微流道,Re=1,於各個不同轉角處之灰階值比較圖。...52 圖 3-6a,60 度轉角微流道,Re=0.01,於各個不同轉角處之灰階值比較圖。...53 圖 3-6b,60 度轉角流道,Re=1,於各個不同轉角處之灰階值比較圖。...54 圖 3-7a,半圓形流道,Re=0.01 於各個不同轉角處之灰階值比較圖。...55 圖 3-7b,半圓形流道,Re=1 於各個不同轉角處之灰階值比較圖。...56 圖 3-8a,90 度轉角流道,Re=0.01 於各個不同距離之灰階值比較圖。...57 圖 3-8b,90 度轉角流道,Re=1 於各個不同距離之灰階值比較圖。...58 圖 3-9a,60 度轉角流道,Re=0.01 於各個不同距離之灰階值比較圖。...59 圖 3-9b,60 度轉角流道,Re=1 於各個不同距離之灰階值比較圖。...60 圖 3-10a,半圓形流道,Re=0.01 於各個不同距離之灰階值比較圖。...61 圖 3-10b,半圓形流道,Re=1 於各個不同距離之灰階值比較圖。...62 圖 3-11a,三角形微混合器,Re=0.01。...63 圖 3-11b,三角形微混合器,Re=0.1。...63 圖 3-11c,三角形微混合器,Re=1。...64 圖 3-11d,三角形微混合器,Re=10。...64 圖 3-12a,方形微混合器,Re=0.01。...65 圖 3-12b,方形微混合器,Re=0.1。...66 圖 3-12c,方形微混合器,Re=1。...67 圖 3-12d,方形微混合器,Re=10。...68 圖 3-13a,三角形微混合器在不同雷諾數下之灰階值比較圖。 ...69 圖 3-13b,方形微混合器在不同雷諾數下之灰階值比較圖。 ...70 圖 3-14a,方形微混合器,Re=1,以CFDRC模擬轉角處之情形。...70 圖 3-14b,方形微混合器,Re=1,以CFDRC模擬內部之情形。 ...71 圖 3-14c,方形微混合器,Re=1,以CFDRC模擬出口處之情形。...72 圖 3-15a,3D流道示意圖。...73 圖 3-15b,以CO2雷射打穿蓋玻片後之圖片。 ...74 圖 3-15b,以ArF雷射打穿蓋玻片後之圖片。...74 圖 3-16a,60 度轉角流道示意圖。 ...75 圖 3-16b,60 度轉角流道的μ-PIV分析結果。 ...75 圖 3-16c,60 度轉角流道示意圖。 ...76 圖 3-16d,三角形流道的μ-PIV分析結果。 ...76 圖 3-16e,方形流道示意圖。 ...77 圖 3-16f,方形流道的μ-PIV分析結果。 ...77 圖 3-17a,Re=0.01,L=5950µm ,3D流道於各個三角形所拍攝的圖形。...79
圖 3-17b,Re=0.01,L=5950µm ,3D流道於各個三角形之灰階值比較。...79 圖 3-18a,Re=0.1,L=5950µm ,3D流道於各個三角形所拍攝的圖形。...81 圖 3-18b,Re=0.1,L=5950µm ,3D流道於各個三角形之灰階值比較。...81 圖 3-19a,Re=1,L=5950µm ,3D流道於各個三角形所拍攝的圖形。...83 圖 3-19b,Re=1,L=5950µm ,3D流道於各個三角形之灰階值比較。...83 圖 3-20a,Re=0.01,L=19250µm,3D流道於各個三角形所拍攝的圖形。...85 圖 3-20b,Re=0.01,L=19250µm ,3D流道於各個三角形之灰階值比較。...85 圖 3-21a,Re=0.1,L=19250µm,3D流道於各個三角形所拍攝的圖形。...87 圖 3-21b,Re=0.1,L=19250µm ,3D流道於各個三角形之灰階值比較。...87 圖 3-22a,Re=1,L=19250µm,3D流道於各個三角形所拍攝的圖形。...89 圖 3-22b,Re=1,L=19250µm ,3D流道於各個三角形之灰階值比較。...89
1. 序論
1.1 研究動機與目的
微機電系統(MEMS ,Micro-Electro-Mechanical-Systems) 是一個跨領域的技 術整合系統,因此必須結合機械、電子、材料、控制、物理、生醫、化學、光學 等多重技術整合的研發領域,其特色為兼具微小化、可量產之新製造技術,不僅 可有效協助製造業改善製程,使產品提高品質、性能與可靠度,進而提高附加價 值,同時可降低製造成本及能源消耗,而其可應用的產業範圍十分廣泛,諸如生 醫保健、資訊、通訊、消費性電子、工業生產、航空工程、國防工業、環保工安…… 等,因而成為目前科技界人士公認為最具未來發展潛力及前瞻性的研究領域。 而微流體系統為其中極重要的一環。在實際應用上如:可攜式生物醫學檢 測、病理分析、藥效評估、化學分析檢測、DNA 分析……等。在微流體系統中, 許多的流體物理特性和機械性質也與巨觀的世界不同。由於微小化的特性帶來了 許多已知與未知的優點,所以預期微流體系統在未來也將不斷的成長與進步,最 終的目標將是整合所有功能於一的實驗室晶片 (lab on a chip, LOC) 或微全分析 系統 (micro total analysis system, µTAS)。就以混合來說,混合在巨觀(macro-scale flow)尺度的流場中要達成此一目的 相當容易,一般而言,兩種或多種不同液體的混合是藉由在流場中加入一些擾 動,使得流場產生紊流,增加不同液面的接觸面積,進而達成混合。但是在微尺 度下就並非如此。最主要的原因在於微尺度下要產生紊流是非常困難的一件事。 以水當作例子,當水流入一微流系統,若其特徵長度為 200μm,流速為 10mm/sec,換算後 Re 約為 2,由流體力學可知,在管流中,紊流發生約在 Re 大於 2000 的情況下。而在微尺度下 Re 會遠小於 2000,因此,會以層流的現象 表現在流道中。所以在微尺度下要達成混合,便完全只能由分子間的擴散來達 成,而分子間的擴散取決於接觸面積的多寡,因此,要如何利用不同幾何形狀去
增加兩液體之間的接觸面積,或是利用外加的能量來加速分子間的擴散皆為當前 極為重要的課題。 本實驗是以 Liu 等人的 2D 蛇狀為出發點,在改變不同的角度,以及不同的 雷諾數下,利用實驗室既有設備,如μ-PIV,來對我們所設計的流道來做流場的 觀察,再將所拍攝的圖形用灰階值來做比較,目的在於設計出在低的雷諾數下, 並在短距離以及短時間內達到混合效果的流道。
1.2 文獻回顧
現今發展出來的微混合器,依據產生混合的方式,可將混合器的種類分為二 種:主動式的微混合器(active mixer)與被動式的微混合器(passive mixer)。簡單來 說,主動式混合器基本是上是由外部輸入的能量來產生混合;而被動式混合器是 單純利用幾何形狀或者是流體的特性來產生效果。
1.2.1 主動式微混合器(active mixing)
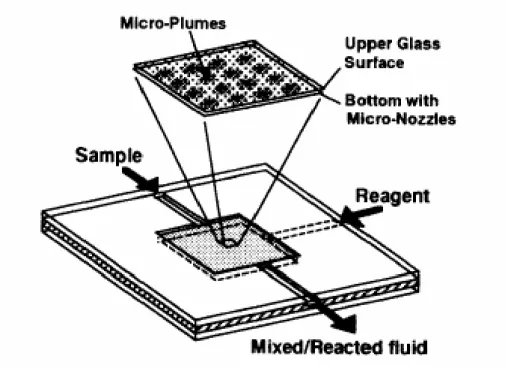
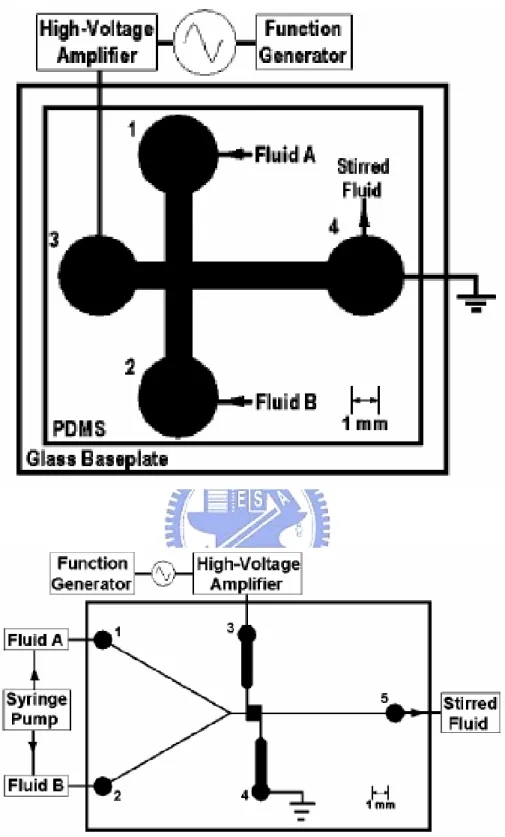
主動式微混合器可以藉由流場中加入一些可移動的機制(moving parts),給予 外加能量,例如:聲波、熱、磁場……等,用來增加液體間的接觸面積。 在 1993 年,由 Miyake 等人[1],首先將一種液體佈滿在混合區內,然後再 將另一種液體經由 400 個 15μm × 15μm 的微噴嘴(Micro-Nozzle)注入混合區 內,如圖 1-1,經由這些微噴嘴,增加兩種液體的接觸面積,達到快速混合的效 果。 在 2000 年,Vibbu Vivek 等人[2],利用壓電材料設計出一聲波混合器,來混 合工作流體,如圖 1-2,此結構為依環狀扇形之聲波震動器(fresnel annular sector actuator,FASA),利用此聲波致動器於工作流體中產生強大的側向聲波推力,可 使流體分子不斷碰撞移動,已達成混合。 2001 年,Oddy M. H.等人[3],在工作流體流動方向兩側給予電場進而產生 磁力,利用磁力影響流體的橫向速度達到混合的效果,其結構圖如圖 1-3。 2001 年,Lee 等人[4],提出的微混合器,是利用流場中產生脈衝流,給予 不同的時序,造成流場中壓力的擾動,以達到混合的效果,其結構如圖 1-4。 2002 年,Suzuki 和 Ho[5],提出的微混合器中,如圖 1-5,先將導線嵌入底 材中並且置於微流道的下方,在導線上施有依時序變化的電流,進而可以改變微 流道中的磁場,當流道中的流體為帶有磁性的生醫流體,施加電流時,這些磁性 粒子會受到磁場的作用而被吸引或是排斥,藉由磁性粒子的移動,來幫助流場之混合,當混合結束後,這些磁性粒子在藉由外加強力的磁場將之分開。
2004 年,Hao Chen 與 Jens-Christian Meiners 採用拓樸混合(Topologic mixing) 的方式[6],利用液體多次交叉流動,並由擴散來增加濃度梯度以得到快速且有 效的混合。基本上流體的流動係在一螺旋狀的流道內進行,如圖 1-6 所示。流體 藉由在流道內不斷的產生分離、旋轉、再結合的流動狀態下來達到混合之目的。
1.2.2 被動式微混合器(passive mixing)
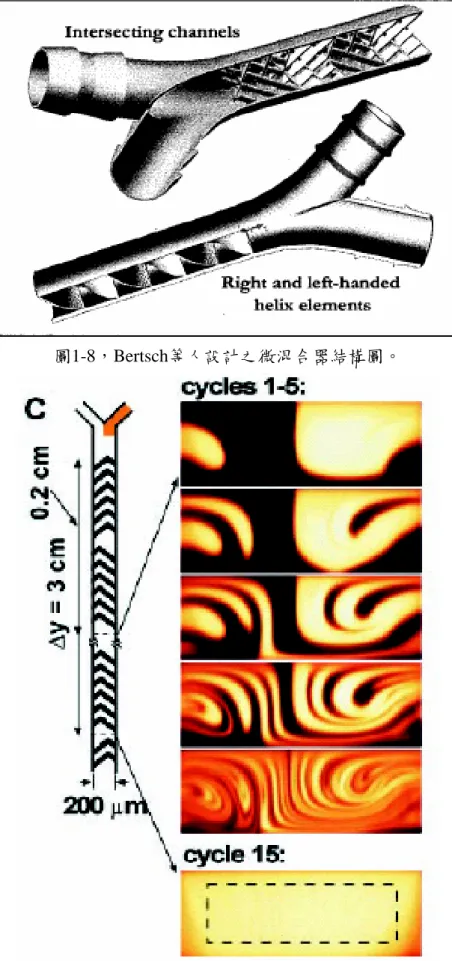
2000 年,Liu 等人[7]利用微機電技術,在微管道中製作一連串彎曲如蛇形的 結構,如圖 1-7 所示,當流體流經此蛇狀結構時,流體會因為此蛇狀的結構而不 斷的改變流動的方向,經由此結構可使工作流體的接觸面積不斷的增加,而達到 混合的目的。此篇文獻也提到雷諾數的增加對蛇狀 3D 結構會有較高的效率,但 對 2D 蛇狀結構而言,反而會有相反的結果,隨著雷諾數的增加,其混合的效果 反而降低,那是因為雷諾數增加,相對的流速也隨之增加,而 2D 結構的混合方 式是單純只靠兩流體間的分子擴散作用,因此當流速越快時,兩流體間分子的擴 散還來不及作用,如此一來雷諾數彽的反而會有較佳的混合效能。 2001 年,Bertsh 等人[8],提出了兩種新的微混合器:第一種微混合器是由 交叉的渠道所構成,將流道分離、重整與結合。第二種則是利用包函左、右螺旋 的立體結構來產生混合的效果。而這兩種結構的觀念都是將流體切割成許多更小 的流體,如此一來其流體間的介面就會增加,也就可以達到混合的效果,如圖 1-8。 2002年,Abraham D. Stroock等人[9],在一寬200µm,深70µm,長3cm的流 道下,又蝕刻了一個類似魚鰭的凹槽,如圖1-9,讓六個魚鰭為一組,在每一組 後讓魚鰭長短相互顛倒,此為個一週期,共15個週期,如此一來,當流體經過每 一個週期後,流體會以左旋以及右旋的方式混合,而到最後一個週期時,可以看 見兩流體混合的效果非常好。由文獻可以知道,主動式的微混合器,最主要是利用聲波、壓力梯度、電場、 或是可移動的機構給予流場一外加的能量或是力,進而促使分子間的擴散速度增 加。而被動式的微混合器單純只靠結構的設計,其結構的設計有蛇形、螺旋、甚 至是凹槽的設計,這些設計都是為了增加流體間的接觸面積以達成有效混合。而 綜觀主動式和被動式混合器,兩者之間各有其優缺點,就主動式混合器來說,其 所造成的混合時間較短且效果較好,但是其製造過程往往都過於複雜與困難,且 耐用性可能較低,相對的其所花費也較高;而被動式混合器,其製程較容易達成, 成本也較便宜,但是其混合的效果不如主動式的微混合器佳,且混合的時間較 長,也因此目前大量的文獻都在研究如何設計出高效能的被動式混合器。
2. 製程及實驗方法
2.1 實驗設備
2.1.1 光學桌
本研究所有實驗設備均架設在 6 英呎×2 英呎的光學桌上,其上的陣列螺絲 孔,孔與孔之間的距離皆為一英吋。2.1.2 銑床位移平台
利用銑床之 x-y-z 位移平台,來作為整個系統的基座,雖然無須使用其具有 x-y-z 微調位移的功能,不過此位移平台具有 300kg~400kg 的重量,可以抑制自 外界而來的震動,使系統不易受外界震動動所影響。2.1.3 x-y-z 位移平台
自行加工製作一平台於 x,y,z 位移平台上,並以千分表(精度可至 1µm)校 正平台與位移軸的水平度。此位移平台之 x、y、z 方向總位移皆為 15mm,而其 最小刻度值在 x 與 y 軸都是 10µm,z 軸經換裝較高精度之分厘卡頭後其最高精 度可以達到 0.5µm,如此便可以利用此位移平台來改變微混合器之位置,量測分 析平面的景深厚度,進而改變觀測區域以及觀測之平面位置,以達到實驗之需求。2.1.4 注射幫浦(KDS250)
微流場的壓力來源,用以驅動流體前進。其推進之最小流量為 0.001 µl/hr; 最大流量為 21 ml/min;可固定注射筒尺寸 10μl–10 ml,可以配合實驗做適當流 量的調整。2.1.5 相機
拍攝流場的主要儀器,使用 Nikon D1H 可換式鏡頭的單眼反射式數位相機, 有效相素為 5 百 33 萬相素(4,204×1,324 相素)。2.1.6 轉接環
為了將顯微物鏡與相機之間做一連接,因此自行設計製造一轉接環與一套環 來連接顯微物鏡與相機,之所以設計另一套環,是因為在實驗初期相機是接以蛇 腹來作為對焦之用,但次蛇腹過於笨重,且不易操作,因此多設計此一套環接於 轉接環之下,連接顯微物鏡,取代蛇腹,作為對焦之用。2.1.7 顯微物鏡組
在本實驗選用 Mitutoyo 之顯微物鏡,依照實驗裝置的大小來選用 5 倍或 10 倍之顯微物鏡,來做流場觀察。2.1.8 μ-PIV
利用學長先前所架設好之μ-PIV 來對我們所製作的流道來做流場分析,以 便知道流體在各種不同流道下,速度場分佈的情形。2.2 流道設計
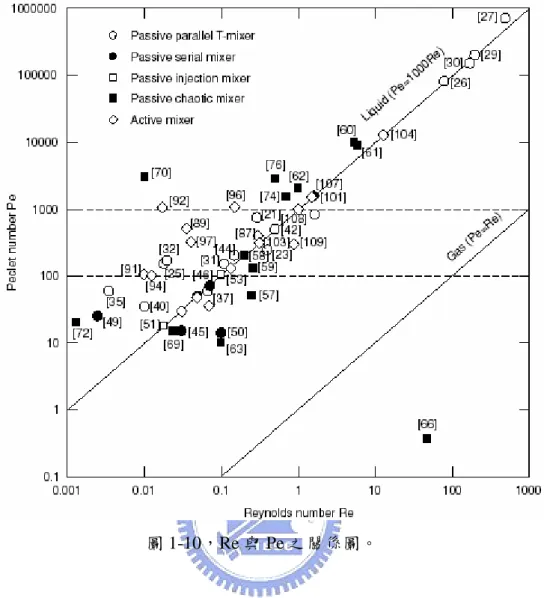
在微流系統中,因為典型的流體都只有較低的雷諾數,及代表流體間的黏滯 力大逾期慣性力,因此會將流動產生的擾動減弱,所以要達到完全的混合則僅靠 分子之間的擴散行為。由 Fick 定律可知。 x y DA J ∂ ∂ − = 其中 J 微質量通量,D 為擴散係數,A 為接觸面積,y 為濃度,x 為幾何長度。 由此可知,接觸面積的增加可以增大擴散的質量通量。 在 2004 年,Nam-Trung 與 Zhigang 等人[10],將 Re 與 Pe 作進一步的比較, 得到下列式子: D D L Pe D UL Pe UD h h ν ν = ⇒ = = , Re Re (1)其中 為水力半徑(hydraulic diameter),U 為流速,ν為運動黏度(kinematic
viscosity),D 為擴散係數(diffusion coefficient),L 在此篇文獻中對於 2D 的流道
均泛指流道寬度。因此, 與 L 通常位於相同的 order 之下,如此可以假設成: h D h D 1 /Dh ≈ L (2) 而在液體中運動黏度與擴散係數的 order 分別為: 1 2 6 10− − = m s ν ,D=10−9m2s−1 (3) 將(2)式與(3)式代入(1)式及可得出:
Re 1000 ≈ Pe 而在 Pe 與 Re 之關係圖中 剛好為一條直線,如圖 1-10。而 Nam-Trung 與 Zhigang 等人將各種微混合器中 Pe 與 Re 之關係均繪製於此關係圖中,由此圖 可以發現,不論是主動或被動式微混合器,絕大部分都落在低 Pe 與低 Re 的範圍 之中,這也就成為本實驗設計流道的重要依據之一。 Re 1000 ≈ Pe 而在流體力學上還有另外一種機制幫助混合,即為二次流動(Second flow)。 所謂二次流動是指當流道並非直線狀,因此流動並非單指向 X 軸。因此,流體 流經一彎曲流道,會對其產生水平力和垂直力,故會有一壓差,而在管內有可能 因為摩擦力,加上彎管所產生的離心效應而造成能量的損失,此種橫向流動會對 流道外側有衝擊作用,這對混合有極大的幫助。 因此,綜合以上的理論,在實驗初期設計出各種不同形式以及不同長度的微 混合器,其結構深度從 20μm 到 100μm,寬度從 20μm 到 200μm,而在兩流 體進入混合器起算的流道長從 3mm 到 30mm。本實驗中所使用的工作流體為去 離子水(D.I. Water)以及墨水,而流體的流量約為 0.01μl~40μl,雷諾數約在 0.01 到 10 之間。而換算後,50μm 寬度之流道,其 Pe=100~10000;200μm 寬 度之流道,其 Pe=250~25000,皆位在 Pe=1000Re 此條線附近。 最後我們在尺寸的考量下選擇了以寬度為 50μm,深度為 50μm,長度為 2000μm,來製作我們的流道,選用的流體方面,不論是水或是用各個比例的甘 油,其均落在 Pe=1000Re 的直線附近的範圍內,如圖 1-11。
2.3 製程
本實驗除了繪製光罩於本身的電腦完成之外,其餘從 Wafer 之清潔到 PDMS 與載波片接合,完全是於台南國家奈米元件實驗室(NDL)完成。2.3.1 底片式光罩繪製及製作
本實驗所設計之光罩,是由 AutoCAD 2004 此軟體所繪製的圖檔,再將此圖 檔送至光罩底片公司,將本實驗所需要的微混合器的圖形繪製於底片上,作為在 微影(photolithography)製程中曝光時所用的光罩,而因為我們使用的光阻為 SU-8,此一為一種負光阻,其特性為曝光後的光阻會留在 Wafer 上,其餘的皆會 隨顯影液流失,因此在做出底片式光罩後,可發現所設計的圖案皆成為透明的型 態,而本實驗所送的製作光罩之公司,其最小線寬可達 10μm,足以滿足本實驗 之要求。而該公司所作出之光罩,如圖 2-1,左右兩邊為注入口,下方為出口。2.3.2 Wafer 與載波片之清潔
對 Wafer 進行 RCA clean,主要是將 Wafer 表面處理乾淨,此步驟極為重要, 若 Wafer 上任何有機物或污染,則會造成稍後在塗佈光阻時,塗佈不均勻,甚至 破壞微混合器的結構。而對 Wafer 進行 RCA clean 是使用 NDL 內濕式蝕刻清洗 系統(Wet bench),如圖 2-2,其使用藥劑及目的如下所示:
1. H2SO4:H2O2 = 3:1 去除有機物
2. 沖 D.I. water 5 分鐘
3. HF:H2O = 1:100 去除 native oxide
4. 沖 D.I. water 5 分鐘
6. 沖 D.I. water 5 分鐘 7. HCl:H2O2:H2O = 1:1:6 去金屬離子 8. 沖 D.I. water 5 分鐘 9. HF:H2O = 1:100 去除 native oxide 10. 沖 D.I. water 5 分鐘 最後再將 Wafer 放入旋乾機內,如圖 2-3,將殘留在 wafer 內之水珠旋乾並 通以熱氮氣將水氣蒸發掉,最後將處理過後之 Wafer 裝入 Wafer 盒內,並在外部 以保鮮膜覆蓋,以免 Wafer 再次受到污染。 而清潔載波片的目的除了在清除表面的汙染外,其另一作用是接下來與 PDMS 為混合器做接合時,能確保兩者接合的效果良好,其清潔的步驟如下: 1. 載波片放入丙酮, 加上超音波震盪 5min
2. D.I. water 沖 5min
3. H2SO4: H2O2=3:1, 10min 4. D.I. Water 沖 10min
5. NH4OH:H2O2: DI water=1:1:2, 加熱至 75 ℃, 10 分鐘 6. D.I. Water + 超音波震盪 5min
7. 以氮氣吹乾
將處理完之載波片以載波片盒裝好後,同樣的,也用保鮮膜覆蓋住,防止其 受到污染。
2.3.3 微影技術
將做完 RCA clean 的 Wafer 放入無塵室中之自動化光阻塗佈及顯影系統 (Tracker)內,如圖 2-4,按照所需微混合器的深度 20μm、50μm 或 100μm 來
點選參數,選擇完後,接下來由機械手臂將 Wafer 送入機台內開始塗佈 SU-8 光 阻,塗佈完後經過軟烤、硬烤,再經由機械手臂放入載台內,依所塗佈的厚度的 不同,一片 Wafer 塗佈 SU-8 負光阻的時間約為 30 分鐘至 90 分鐘不等。
將塗佈完 SU-8 負光阻之 Wafer 放入光罩對準曝光系統(Mask aligner)內,如 圖 2-5,將製作好之光罩黏貼於 4 吋×4 吋的玻璃上,置於機台光罩載台內,進行 曝光的動作,待曝完光後再放入光阻塗佈機內,進行顯影的動作,首先將曝完光 之光阻進行曝後烤,接下來塗以顯影液,由於 SU-8 屬於負光阻,因此在坡晥 r 上僅會留下被曝完光之光阻,即為實驗所設計之微混合器之圖案,如此 PDMS 的母模就已完成,示意圖如圖 2-6。
2.3.4 PDMS 微混合器製作方式
之所以選用 PDMS(polydimethylsiloxane,聚二甲基矽氧烷)作為微混合器材料, 是因 PDMS 在微米尺度元件的製作在近幾年來成為極重要的材料,如:微幫浦(Micro-pump)、微混合器(Micro-mixer)、微通道(Micro-channel)等,最主要
的原因在於其材質具有堅韌、透明、符合光學檢測技術需求,並且其製造過程簡 單,元件可以再複製,且非極性及具有防水性,使其可應用於水容易或生物樣品 的實驗或檢測。其製程如下: 1. 將 PDMS 的 A 劑與 B 劑(固化劑)以 10:1 的比例混合,並加以充分 攪拌。 2. 將攪拌均勻後的 PDMS 放入真空幫浦內抽氣,直至 PDMS 內之氣泡消 失為止。 3. 將母模放在加熱板(Hot plane)上,以 100℃加熱,淋上 PDMS,約 90 分 鐘後,將凝固之 PDMS 撕下。 以上即為整個 PDMS 微流道之製造過程。
2.3.5 接合技術
將 清 洗 好 之 載 波 片 與 做 好 之 PDMS 微 流 道 送 入 反 應 式 離 子 蝕 刻 系 統 (STS-RIE)內打氧電漿(Oxygen Plasma),如圖 2-7,其目的是要將原本疏水性質的 PDMS 和載波片之表面,在打完氧電漿後使其表面變為親水,之所以要將其變為 親水性是因在微小尺寸下的流體,表面張力及黏滯力的作用遠大於重力效應 (body force)。而影響表面張力最主要的物體表面特性為親水性或疏水性。親水性 或疏水性的區分主要在於流體與固體表面的接觸角。當接觸角小於 90∘時稱為 親水性,當接觸角大於 90∘時則稱為疏水性。圖 2-8a 為 PDMS 在打氧電漿前水 珠與其表面之接觸角之情形,此時其接觸角約為 91.3 度;而將 PDMS 打完氧電 漿後其接觸角變為 1.5 度,如圖 2-8b;圖 2-9a 為載波片打氧電漿前水珠與其表面 之接觸角之情形,此時接觸角為 2.6 度;而在打完電漿後其接觸角變為 20 度, 如圖 2-9b。此部分之結果是利用成大生物醫學應用實驗室內之 CCD 與 matrox inspector 攝影軟體所拍攝而成。 將打完氧電漿之載波片與 PDMS 之表面淋上 D.I. Water 作為緩衝,再將兩者 接和在一起,置於加熱板上,以 50℃~70℃烘烤,直到流道上的水氣消失為止。 如此,整個微混合器製作大致完成。2.4 實驗方法與步驟
將做好之裝置,於入口與出口處各上插入 22 號針頭,首先用 silicon 膠將裝 置與針頭接合,其目的在於防止流體再注入時從接合處溢出,待其乾時再與 AB 膠黏著,以固定整個裝置,接下來,在針頭頂端,用以內徑 0.58mm,外徑 0.96mm 之 PE 管與注射幫浦的注射針頭做連接,而實驗所使用的注射針筒為 Hamilton 1ml 以及 25μl 之針筒,接下來依照雷諾數的不同來定義我們的流量範圍,從 15μ l~0.015μl。利用先前所介紹之 Nikon D1H 數位相機連接轉接環及 Mitutoyo 之顯 微物鏡,先使用轉接環底部之套環對鏡頭進行粗調,再用 x-y-z 位移平台將整個 視窗調製最清楚的狀態,接下來將數位相機透過 1394 傳輸線與電腦做連接,再 利用相機所附贈之 Nikon Capture2.0 軟體,來操控相機拍攝之動作,如此一來可 避免手動拍攝時所造成的晃動,將拍攝的效果達到最好,如圖 2-10。3. 實驗結果及討論
3.1 2D 微混合器混合結果比較
在 2D 微混合器方面,製作了三組不同類型的流道,分別為轉角 90 度、 60 度以及半圓形等蛇狀的流道,來做相互的比較,如圖 3-1a~3-1c,是以 AutoCad 軟體所繪出之光罩檔案,在每經過 10 個轉角或經過 5000μm 後,加以標駐,作 為接下來拍攝的依據,每個流道總長為 2cm,寬度和深度均為 50μm,每段轉折 處的長度為 500μm,所拍攝的範圍是下在不同的雷諾數 0.01~10,當流體經過一 定轉折處以及流經相同距離後來拍攝,再經由灰階處理後之結果來做比較與討 論。3.1.1 相同轉折數下之灰階值比較
如圖 3-2a~3-2d,為轉角 90 度流道於 Re=0.01、0.1、1、10,在流體每經過 10 個轉角後拍攝的情形,我們可以發現在 Re=0.01 時,在經過越多的轉角數後, 發現其有明顯的擴散效果但隨著雷諾數越來越大,其擴散的效果反而越來越差, 這在其他蛇狀的流道也可發現這樣的情形,這種情形將在稍後有所說明;圖 3-3a~3-3d 與圖 3-4a~3-4d,為轉角 60 度流道與半圓形流道以相同的方式所拍攝 的圖形。我們將所拍攝的圖形,分別取流體經過的轉角數為 1、20、40 下的圖形 來做灰階值的比較。 首先我們先由 Re=0.01,在經過越來越多的轉角數後兩流體的擴散情形來說 明,圖 3-5a 為 90 度轉角流道在上述三處轉角數後取灰階值後產生的比較圖,在 流體流經第一個轉角處時,由先前所拍攝的圖形來看,尚未有明顯的擴散效果產 生,而在灰階的圖形中,所呈現的是較陡峭的曲線,而在經過 20、40 個轉角後, 我們可以發現,曲線有漸漸平緩的的趨勢,而在所拍攝的圖片來看也有一定的擴 散效果產生。圖 3-5b 為 Re=1 的情況下所分析出來的灰階比較圖,也有如同在Re=0.01 下所產生的情形發生,但是不論是從拍攝的圖形或是以灰階曲線來看 Re=0.01 比起 Re=1 所產生的擴散效果要好出許多。 圖 3-6a 為 60 度轉角流道於 Re=0.01 下,在三個轉角處取灰階值後所產生的 圖形,其所呈現的曲線趨勢也如同 90 度轉角流道的情形一樣,在經過越來越多 的轉角後,其所呈現的曲線會越趨平緩,圖 3-6b 為相同流道於 Re=1 時分析出來 的灰階值比較圖,同樣的,隨著轉角數越多會越趨平緩,而將兩個不同雷諾數來 比較,很明顯的,也可發現較低的雷諾數有較好的擴散效果。圖 3-7a 與圖 3-7b 為半圓形流道於 Re=0.01 與 Re=1 下所分析出來之灰階值比較圖,一樣也有相同 的情況發生,因此,我們發現轉角數越多會對兩流體的擴散造成一定的影響。 接下來我們於不同的流道取相同的雷諾數(Re=0.01)來比較,可以發現轉角 60 度的流道再經過 40 處的轉角後,曲線的平緩度比起 90 度轉角與半圓形流道 要平緩許多,而在 Re=1 的情況下來作比較我們也可以發現相同的情形。
3.1.2 相同距離下之灰階值比較
接下來我們取流體流經 0mm、5mm、15mm、20mm 後兩流體擴散的情形來 做灰階值的比較,如圖 3-8a 與圖 3-8b 分別是在 Re=0.01 與 Re=1 在轉角 90 度的 流道下在流經上述所說之距離得出的結果,我們可以發現在一開始時,灰階值的 差距相當的明顯,而在經過 5mm、15mm、20mm 後,所呈現的曲線會越來越趨 平緩,此即代表距離對流體的擴散會有一定的幫助,而我們在以相同的流道做不 同雷諾數的比較,可以發現雷諾數越低其曲線平緩的程度會遠比高雷諾數所呈現 的曲線要好很多,而在不同的流道下,圖 3-9a 與圖 3-9b 分別是在 Re=0.01 與 Re=1,60 度轉角流道灰階值的比較圖,圖 3-10a 與圖 3-10b 分別是在 Re=0.01 與 Re=1,半圓形流道灰階值的比較圖,我們也可以發現相同的情形。接下來我們以不同的流道來做比較,在相同雷諾數下,我們可以發現 60 度 轉角的流道,其平緩的程度要比其他蛇狀流道要好,依據相同的轉折數與相同距
離下的比較我們可以得到一個結論,那就是 60 度轉角流道所造成兩流體擴散的 程度要比 90 度轉角與半圓形流道要高出許多,因此接下來我們所設計的流道均 以三 60 度轉角的流道為主。 由上述得到的結果,我們將蛇狀 60 度以及 90 度的流道為基礎來做變化,如 圖 3-11a 到圖 3-11d,為三角形流道在注入流體後於雷諾數 0.01 到 10 所拍攝的流 場情形,圖 3-12a 到圖 3-12d,為方形流道在注入流體後於雷諾數 0.01 到 10 所拍 攝的流場情形,此兩流道的設計為,總長度均為 31200μm,所流經的轉角數均 為 24,流動方向先從右側的流道以順時鐘方式流至內部,再以逆時鐘方式流至 外部,圖 3-13a 與圖 3-13b 為三角與方形流道在不同雷諾數下內部兩流體擴散取 灰階後情形,我們也可發現在雷諾數 0.01 下,流經相同距離與轉角後,三角形 的曲線也比方形的曲線要平緩許多,代表著三角形的擴散效果要比方形要好,但 是我們亦可由原本的圖形來看,不論是三角形還是方形的流道在內部時有著良好 的擴散效果後,由內部逆時針道外部後兩流體出現漸漸分離的狀況,而針對此種 現象,我們以 CFDRC 商業套裝軟體模擬後可得到答案。 圖 3-14a,是針對方形流道在 Re=1 下於轉角處所模擬出來的結果,我們可 以發現,在兩流體流經轉角處後,其內部流體會因為速度較大而擠壓到外側的流 體,而在經過其他的轉角,如圖 3-14b,一直到最內部後此擠壓的效果會越來越 明顯,圖 3-14c,但兩流體若在此時未達到完全混合的狀態後在經過相反方向道 外部,此擠壓的效果會因此而倒轉過來如圖 3-14d,由外部的流體擠壓內部的流 體,圖 3-14e 為在出口處所模擬的情形,雖然兩流體混合的區域明顯變大,但是 仍未達到完全混合的狀態,而這就是為何我們由上往下觀察兩種流體在內部有看 似的混合效果,而在外部後卻會分開的原因,而這種現象會根據實驗的觀察會隨 著雷諾數的增加會越來越明顯,但不可否認的是,在流體經由相同方向的轉角下 會產生一定的混合效果,而為了解決流體不由逆時針方向流出的問題,我們發展 出一種 3D 的流道,讓流體均由同一方向流至內部,圖 3-15a 為我們所製造 3D 流道的示意圖,在流體流至第一個三角形內部後不以逆時針方向流出而是向下流
動流至下一個三角形,接下來均以此方式流至外部,如此一來流體均可以相同的 方向流至外部,而其混合情形將在 3.2 節加以討論。 而在 3D流道製造過程方面,與前面章節介紹的方式大致相同,唯一不同的 是在兩片PDMS之中加入一蓋玻片,起先,我們利用中正大學王少君老師實驗室 的CO2雷射來打穿我們的蓋玻片,雖然能夠打穿但是其打穿孔的的尺寸大約是在 200μm到 300μm之間,如圖 3-15b,如此一來會使得我們所設計流道的內部尺 寸一開始就必須大於 300μm,如此一來會使得我們整個流道的尺寸過大,流體 流經的距離過長,不符我們設計的原則,因此我們再經由國家衛生研究院陳景欣 博士的協助下,利用ArF雷射,將整個孔洞縮小至 75μm以下,如圖 3-15c,再 將蓋玻片與PDMS來做結合,完成我們的裝置。
3.1.3 以μ-PIV 拍攝之結果與討論
接下來我們取三種不同的流道,60 度轉角蛇狀流道、方形和三角形流道, 利用我們實驗室所擁有的μ-PIV,來對流場流速作分析,而有關μ-PIV 的驗證, 先前學長已有做完整的說明,可以證明所拍攝出來的資料有一定的準確性,因此 在這不多做說明,以下就針對三種不同的微流道來做拍攝,其流道寬度深度均為 50μm,以注射幫浦控制流量為 1.5μl/min,換算之後其 Re=1。 首先針對 60 度轉角流道所拍攝的圖形來做說明,流道簡圖如圖 3-16a 所示, 圖 3-16b 為μ-PIV 分析結果,我們可以發現在靠近 60 度轉角部分具有較高的流 速,換算之後其最高流速約為 5mm/s。 圖 3-16c 為三角形流道分析處的簡圖,圖 3-16d 為μ-PIV 分析結果,同樣的 在流體經過轉角後會產生較高的流速,換算之後其最高流速約為 2.5mm/s。 圖 3-16e 為方形流道分析處的簡圖,圖 3-16f 為μ-PIV 分析結果,同樣的在 流體經過 90 度轉角後會產生較高的流速,換算之後其最高流速約為 9mm/s 就先前的結果來看流速越大會造成的擴散效果會越來越差,而三角形的流道 會比方形的流道擴散效果要好,經由μ-PIV 拍攝可以說明,在方形的流道內速度遠比三角形的流速要高出很多,這也間接說明了為何三角形流道會有較好的擴 散效果的原因。
3.2 3D 微混合器混合情形
以 3.1.1 和 3.1.2 的結論,三角形比起方形的流道要有較好的擴散效果,因此 我們以三角形流道為基礎製作了兩組 3D 微混合器的裝置,此兩組的流道寬度與 深度均為 50μm,而尺寸較小的流道,其每一個三角形的長度為 5950μm,共有 8 個三角形組成,使得整個裝置的總長度約為 4.8cm,而較大的裝置其每一個三 角形的長度為 19250μm,總長約為 16cm。 首先我們先由較小的裝置來看,圖 3-17a,是在 Re=0.01 下所拍攝流場的狀 況,我們可以發現流體經過第一個三角形後,在第 2 與第三個的流道內已產生相 當好的擴散效果,而再流經過第 4 個三角形後,所產生混合的效果可說是非常的 良好,接下來我們取三角形的內部的擴散情形來做灰階值的比較,如圖 3-17b, 其所分析出來的狀況跟所拍攝的情形是一樣的,在第三個三角形後,所呈現灰階 值的曲線跟初始值的曲線來比較很明顯的平緩許多,而在換算之後,我們所設計 的流道,在 Re=0.01 下,流經過 2.4cm 後即可達到良好的混合效果。圖 3-18a,是在相同裝置下以 Re=0.1 所拍攝的圖形;圖 3-19a,是 Re=1 以 所拍攝的圖形;在 Re=0.1 下,我們也可以發現其也會有產生良好的混合效果, 但是所發生的位置明顯的偏後,我們由他的灰階值即可發現,圖 3-18b,在第 5 個三角形後才會有良好的混合效果產生;而在 Re=1 下,其產生較好的混合效果 是在流經第七個三角形後才呈現比較緩和的曲線,如圖 3-19b。 而在大的三角形下的情形,如圖 3-20a,是以 Re=0.01 下所拍攝流場的狀態, 可以發現在第 2 個三角形流道下,已產生相當良好的混合效果,在灰階值的圖形 下亦可以發現相同的情形,如圖 3-20b,此時流體流經的兩個三角形的距離為 4cm。
圖 3-21a,是在相同裝置下以 Re=0.1 所拍攝的圖形;圖 3-22a,是 Re=1 以 所拍攝的圖形;在 Re=0.1 的圖形中,在第 3 個三角形下,才有比較穩定的混合 效果,如圖 3-21b;而在 Re=1 的灰階值下,如圖 3-22b,在第 4 個三角形後,才 產生良好的混合效果。
那就是雷諾數越大的情況下其所產生的混合效果會比低雷諾數下所產生的混合 效果要差,其原因就是因為當雷諾數越大,流速也會隨之變大,而在其他條件均 相同的情形下,由先前的 Pe- Number 的定義可以知道,流速越大,代表流體之 間的混合是靠速度所造成的對流效應大於流體分子間自身造成的擴散,而若要看 對流效應對流場混合的影響勢必要增加流道的長度,但由於我們所設計的流道目 的是在於縮短兩流體混合的距離,因此當流速越大時,對流效應還沒產生效用反 而會使得分子間來不及擴散,因此才會早成雷諾數越大混合效果卻較差的原因。
4.結論
根據我們實驗的結果可知道,在相同的流道下,當 Re=0.01 時其混合的效果 會比 Re=0.1,Re=1 還要好,也就是說混合的距離會隨著雷諾數的降低而越來越 短,而在不同的蛇狀設計下,根據我們所拍攝的圖形以及灰階值來看,60 度轉 角的流道會比 90 度轉角以及半圓形流道混合效果要好。 而在 3D 流道方面,我們所設計的流道在 Re=0.01 時於第四個三角形已經達 到相當良好的混合效果,而混合的距離也僅有 2.4cm,比起 Abraham D. Stroock 等人的凹槽設計於 3cm 下才達到混合的效果短了 6mm,足可說明我們所設計的 流道有較好的混合效果。5.未來展望
目前我們所設計之 3D 微混合器其混合的效果非常好,但是目前仍有幾個地 方需要去克服,第一是在製作 3D PDMS 遇到技術上的問題為流道與流道之間對 準的問題,目前使用的方式是在上下兩層的流道旁設計一組對準的圖形,然後將 整個裝置放在顯微鏡下以手動的方式來對準,很容易因為個人的因素使得先前所 作好的流道因為對準的問題而使得整個裝置沒辦法使用,因此要如何將兩層 PDMS 對準做出良好的 3D 結構,也是接下來解決的問題。 另外,PDMS 的親水性會因為時間的關係慢慢的變為疏水性,如此兩流體要 達到混合的效果將更為困難,因此,要如何延長 PDMS 親水性的時效也是接下 來研究的課題之一。參考文獻
1. R. Miyake, T.S.J Lammerink, M. Elwenspoek, J.H.J. Fluitman, “Micro Mixer with Fast Diffusion,” Micro Electro Mechanical Systems, 1993, Proceedings An
Investigation of Micro Structures, Sensors, Actuators, Machines and Systems,
IEEE, 1993.
2. V.Y. Vibhu and E. Zeng, and K. Sok, “Novel acoustic- wave Micromixer,”
MEMS, pp. 668-673, 2000.
3. M.H. Oddy, J.G. Santiago, and J.C. Mikkelsen, “Electrokinetic Instability Micromixing,” Analytical Chemistry, Vol. 73, No. 24, December 15, 2001.
4. Y.K Lee, J. Deval, P. Tabeling, and C.M. Ho, “Chaotic mixing in electrokinetically and pressure driven micro flows,” The 14th IEEE Workshop on
MEMS Interlaken, Switzerland, 2001.
5. H. Suzuki, and C.M. Ho, “A Magnetic Force Driven Chaotic Micro-Mixer,”
Proceedings of the IEEE 15th Annual Workshop of MEMS, 2002, U.S.A, pp.40,
2002.
6. Hao C., and Jens-Christian M., “Topologic mixing on a microfluidic chip,”
APPLIED PHYSICS LETTERS, Volume 84, pp.2193-2195, 2004.
7. R.H. Liu, M.A. Stremler, K.V. Sharp, M.G. Olsen, J.G. Santiago, R. J. Adrian, H. Aref, and D.J. Beebe, “Passive Mixing in a Three-Dimensional Serpentine Microchannel, ”Journal of Microelectromechanical Systems, Vol. 9, No. 2, 2000.
8. A. Bertsch, S. Heimgartner, P. Coussean, P. Renaud, “3D Micromixers- Downscaling Large Scale Industrial Static Mixers,” IEEE, 2001.
9. A.D. Stroock, S.K.W. Dertinger, A. Ajdari, I. Mezic, H.A. Stone, G.M. Whitesides, “Chaotic Mixer for Microchannels, ” Science, Vol. 295, January 25, 2002.
10. Nam-Trung Nguyen and Zhigang Wu, “Micromixer—a review, ” Journal of
Micromechanics and Microengineering, February 2005, vol. 15, no. 2, pp.
R1-R16(1)
11. 吳志輝, “μ-PIV 技術的發展及其在微流體研究上的應用”, 交通大學機械工 程學系碩士論文, 2004.
12. 吳國賢, “矽膠材質被動式微混合器之研發”,台灣大學應用力學研究所碩士 論文, 2003.
圖 1-1,Miyake 等人設計之混合器。
圖 1-4,Lee 等人所設計之微混合器。
圖 1-6,Hao Chen 等人提出之微混合器。
圖1-7,Liu等人設計之微混合器。
圖1-8,Bertsch等人設計之微混合器結構圖。
圖 2-1,製作完成之光罩圖。
圖 2-3,旋乾機。
圖 2-5,光罩對準曝光系統(Mask aligner)。
圖 2-8a,PDMS 打氧電漿之前,接觸角為 91.2 度。
圖 2-9a,載波片打氧電漿之前,接觸角為 81.5 度。
圖 2-10,流場拍攝儀器。
圖 3-1b,60 度轉角微混合器。
圖 3-11a,三角形微混合器,Re=0.01。
圖 3-11c,三角形微混合器,Re=1。
圖 3-13b,方形微混合器在不同雷諾數下之灰階值比較圖。
圖 3-14b,方形微混合器,Re=1,以 CFDRC 模擬第 5 個轉角處之情形。
圖 3-14d,方形微混合器,Re=1,以 CFDRC 模擬距離出口第 3 個轉角處之情形。
Inlet
Outlet
圖 3-15b,以CO2雷射打穿蓋玻片後之圖片。
圖 3-16a,60 度轉角流道示意圖。
圖 3-16c,60 度轉角流道示意圖。
圖 3-16e,方形流道示意圖。
圖 3-17a,Re=0.01,L=5950μm ,3D 流道於各個三角形所拍攝的圖形。
圖 3-18a,Re=0.1,L=5950μm ,3D 流道於各個三角形所拍攝的圖形。
圖 3-19a,Re=1,L=5950μm ,3D 流道於各個三角形所拍攝的圖形。
圖 3-20a,Re=0.01,L=19250μm,3D 流道於各個三角形所拍攝的圖形。
圖 3-21a,Re=0.1,L=19250μm,3D 流道於各個三角形所拍攝的圖形。
圖 3-22a,Re=1,L=19250μm,3D 流道於各個三角形所拍攝的圖形。