國 立 交 通 大 學
機械工程學系
碩 士 論 文
多晶矽電容式微加速規的研發
Development of a Polysilicon-based
Capacitive Micro Accelerometer
研 究 生:蔣鎧宇
指導教授:徐文祥
多晶矽電容式微加速規的研發
Development
of a Polysilicon-based
Capacitive Micro Accelerometer
研 究 生:蔣鎧宇 Student:Kai-Yu Jiang
指導教授:徐文祥 Advisor:Wensyang Hsu
國 立 交 通 大 學
機 械 工 程 學 系
碩 士 論 文
A ThesisSubmitted Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master in
Mechanical Engineering September 2009
Hsinchu, Taiwan, Republic of China
多晶矽電容式微加速規的研發
研究生:蔣鎧宇
指導教授:徐文祥
國立交通大學機械工程學系 碩士班
摘 要
本 論 文研究 重點在 於 以 多 晶矽(polysilicon) 為感測結構材料的開發中之 CMOS 製程,來建立起 CMOS-MEMS 電容式加速規相關的設計分析、製作與量 測技術,並整合微感測結構與電路,以達成批次生產為目標。 結構設計上,使用差動式電容來作電容的感測,以減少耦合的影響;且提出 新式的對稱懸吊結構,以解決製程尺寸誤差所造成之雙軸靈敏度不同的問題。並 將透過理論分析與有限元素分析軟體 ANSYS®執行特性模擬,包含懸吊系統、自 我測試致動器、操作頻寬與殘留應力的模擬與驗證。性能的最佳化則以限定晶片 面積內,可達到之最高靈敏度為原則,設計出的單、雙軸結構靈敏度可分別達到 0.85 fF/G 與 1.7 fF/G。製程上則利用退火製程成功地調整多晶矽的殘留應力,並 建立退火製程和殘留應力關係的資料庫。最後利用測試懸臂來建立起抗側向沾黏 及基底沾黏的設計規則,以解決嚴重的沾黏問題。 量測方面,結構尺寸部分的量測將用到本實驗室之電子顯微鏡及三維輪廓量 測儀。結構翹曲量部分則由國家晶片系統設計中心提供之白光干涉儀(white-light interferometer)來量測,而頻率響應部份則透過國家晶片系統設計中心的微機電系 統動態分析儀(MEMS Motion Analyzer, MMA)來量測。Development of a Polysilicon-based Capacitive
Micro Accelerometer
Student:Kai-Yu Jiang
Advisor:Wensyang Hsu
Department of Mechanical Engineering
National Chiao Tung University
Abstract
In this study, employing the polysilicon-based CMOS process, the related technique of design, fabrication, and measurement are built up to develop CMOS-MEMS capacitive accelerometer which integrate sensing circuit and MEMS structure to achieve batch fabrication.
For the design of micro accelerometer, differential-pair sensing finger with gap-closing type is used to reduce the coupling effect; and a novel symmetric layout of suspension is proposed to eliminate the mismatch of spring constants in X and Y axes resulted from size deviation during fabrication, which would simplify the sensing circuit design. Furthermore, through the commercial finite-element-analysis (FEA) software ANSYS®, performances of micro accelerometer including stiffness, residual stress, self-test micro-actuator, and operation bandwidth are simulated and discussed for further verification. In order to achieve high sensitivity of micro accelerometer in the constrained die-area, the sizes of sensing fingers are optimized, and the performance shows that sensitivities of micro accelerometers with single axis design and two axes design can reach to 0.85 fF/G and 1.7 fF/G, respectively.
For the fabrication of micro accelerometer, the residual stress of polysilicon structure that affects the deflection of sensing fingers is adjusted successfully by annealing process, and the database of the correlation between residual stress and annealing process is built up. Furthermore, an anti-stiction design rule is established successfully by finger test key to solve the severe stiction problem.
For the measurement of micro accelerometer, scanning electron microscope (SEM, NCTU) and 3D profiler (ET-4000, NCTU) are used to determine the practical geometric sizes of fabricated accelerometers. The optical profiler (white-light interferometer, CIC) and MEMS motion analyzer (MMA, CIC) are used to characterize the deflection of sensing fingers and the dynamic response of accelerometers, respectively.
誌 謝
「時光荏苒,韶光易逝」。真的好快,我的求學生涯,終於在這不算長但也 說不上短的兩年碩士班,要畫下了句點。說實在,要感謝的人真的是太多了,但 我絕對不會只有謝天,所以還是乖乖的把大家都列出來好好的謝一下吧! 首先我要感謝我的「老闆」-徐文祥老師,從老師的身上真的學到了很多, 也讓我做了很多不同於以往及不同面向的思考,我想我會懷念每個禮拜坐老師的 車去開會的日子。再來要感謝所有實驗室的夥伴:博班的小白哥、家聖、高手、 囧夫、謝一哥,在做研究的路上,從他們身上總是可以快速的學到非常多的東西, 並且讓我深刻的感受到博士班的威能、活課本的功力。已畢業的 HD、拉可、Smile, 也帶領我們歡樂的度過碩一時光(Wii 好好玩!),而拉可更是幫我太多太多,教 了我許多他所學,讓我可以很快的進入狀況,並且順利畢業。同窗的鐵乳、冏熊、 阿克頭博、小澤、溫大哥,一起奮鬥且做研究的日子真的很開心,我想在 CIC 與小姑逃和冏夫喇賽的日子以後我也會非常懷念。而現在實驗室的小朋友們,啾 希、法師、小鐘哥、熱狗、該邊、買客、芋頭,有你們也讓實驗室更熱鬧、更開 心,而碩二的後半段,有啾希這個就甘心翅膀硬的小跟班,讓我在研究之餘還可 以吃到不少以前沒吃過的新竹美食,真的是非常開心! 再來還要謝謝我從小到大的朋友們、文服認識的大家、冏家的小孩子們,你 們是我很大的快樂泉源,真的。最後當然要謝謝我所有親愛的家人,感謝你們永 遠是那樣的支持我與鼓勵我,總是放心的讓我自己去做我想做的事情,謝謝你們。 總而言之,這些我所感謝的人們,在我的生命裡,有「你」真好!謝謝! 鎧宇 予 風城交大目 錄
中文摘要 ... I 英文摘要 ... II 誌謝 ... III 目錄 ... IV 表目錄 ... VII 圖目錄 ... VII 第一章 緒論... 1 1.1 研究背景與動機 ... 1 1.2 文獻回顧 ... 4 1.2.1 加速規操作原理 ... 4 1.2.2 加速規感測方式 ... 5 1.2.3 電容式加速規的發展 ... 6 1.2.4 電容式加速規懸吊的比較 ... 10 1.3 研究目標 ... 14 第二章 含新式懸吊之電容式微加速規... 15 2.1 電容式差動對 ... 15 2.2 概念設計 ... 18 2.2.1 單軸加速規 ... 18 2.2.2 雙、三軸加速規 ... 19 2.3 設計流程 ... 19 2.4 結構設計 ... 20 2.4.1 感測質量塊 ... 20 2.4.2 懸吊設計 ... 212.4.3 系統頻寬 ... 27 2.5 懸臂設計 ... 28 2.5.1 靈敏度 ... 28 2.5.2 翹曲量 ... 29 2.5.3 感測懸臂尺寸及數目的決定 ... 31 2.6 致動器 ... 33 2.7 尺寸規劃 ... 34 第三章 製程與封裝... 37 3.1 製程規劃 ... 37 3.2 封裝 ... 39 第四章 製程與量測結果... 41 4.1 製程問題 ... 41 4.1.1 退火製程與結構殘留應力 ... 41 4.1.2 沾黏現象及抗沾黏設計 ... 43 4.2 抗沾黏規則 ... 46 4.2.1 抗側向沾黏規則 ... 47 4.2.2 抗基底沾黏規則-感測懸臂 ... 50 4.2.3 抗基底沾黏規則-感測質量塊 ... 52 4.3 製程結果 ... 53 4.3.1 補償殘留應力設計之結果 ... 54 4.3.2 實際製程尺寸 ... 55 4.4 量測結果 ... 56 4.4.1 結構靜態量測 ... 58 4.4.2 結構動態量測 ... 60
第五章 結論... 67 5.1 總結 ... 67 5.1.1 設計 ... 67 5.1.2 製程 ... 67 5.1.3 量測 ... 67 5.2 未來工作 ... 68 參考文獻 ... 69
表目錄
表 1 ADI, ADXL 系列加速規性能與價格... 3 表 2 加速規感測原理比較表... 6 表 3 同尺寸下,兩種彈簧設計的比較... 24 表 4 各產品應用頻寬... 27 表 5 Layout 設計尺寸與實際製程尺寸比較表 ... 56 表 6 各種尺寸下模擬結果,括號內為光罩設計尺寸... 65 表 7 各種尺寸下量測結果,括號內為光罩設計尺寸... 65 表 8 兩軸相差 K 值的模擬與量測比較,括號內為光罩設計尺寸 ... 66圖目錄
圖 1 2004-2009 MEMS 慣性感測器市場[1] ... 2 圖 2 慣性感測器專利分佈圓餅圖... 3 圖 3 質量塊運動系統... 4 圖 4 加速規感測流程... 5 圖 5 體型微加工電容式加速規及面型微加工電容式加速規... 7圖 6 SOI-MEMS Inertial Instrument ... 8
圖 7 CMOS-MEMS 單軸加速規 ... 9
圖 8 ADI, ADXL330... 10
圖 9 曲臂懸吊的設計... 11
圖 12 串聯蜿蜒式懸吊讓雙軸彈簧常數值相近... 13 圖 13 上下型差動對... 15 圖 14 左右型差動對... 15 圖 15 感測懸臂示意圖... 16 圖 16 左右型差動對無法正確判讀加速度值... 16 圖 17 差動對電容感測示意圖... 17 圖 18 單軸電容式加速規概念設計上視圖... 18 圖 19 雙、三軸電容式加速規概念設計上視圖... 19 圖 20 電容式加速規設計流程圖... 20 圖 21 ADXL150 ... 21 圖 22 ADXL330 ... 21 圖 23 蜿蜒式彈簧各尺寸符號標示... 23 圖 24 位移分析... 23 圖 25 模態分析... 24 圖 26 懸吊寬度與懸吊間距示意圖... 25 圖 27 彈簧摺數對 K 值的關係 ... 25 圖 28 彈簧 7 摺下,寬度對 K 值的關係 ... 26 圖 29 彈簧 7 摺下,間距對 K 值的關係 ... 26 圖 30 單軸頻率響應與雙軸頻率響應... 27 圖 31 加速規受 1G 加速度時示意圖 ... 29 圖 32 感測懸臂因結構釋放而翹曲... 29 圖 33 感測懸臂翹曲示意圖... 30 圖 34 將感測懸臂的固定端由外面改成裡面(靠近感測質量塊) ... 31 圖 35 受翹曲的影響下的感測面積... 31 圖 36 感測懸臂所佔面積符號示意... 32
圖 37 兩電容板示意圖... 33
圖 38 致動器與停止器的配置圖... 34
圖 39 單軸尺寸規劃圖... 34
圖 40 雙、三軸尺寸規劃圖... 35
圖 41 製程流程圖... 38
圖 42 日月光 Si Cap & Glass frit 封裝流程 ... 39
圖 43 採用此封裝頇預留 500um 的空間 ... 40 圖 44 未經退火,質量塊因殘留應力影響嚴重拱起。... 42 圖 45 固定退火製程溫度時,退火時間越久,應力也越來越大... 42 圖 46 退火製程時間不變下,退火溫度越高,應力也越來越大... 43 圖 47 質量塊與基底沾黏... 45 圖 48 加高抗沾黏凸起物到 6000A 使結構成功懸浮 ... 45 圖 49 鋸齒設計抗側向沾黏... 46 圖 50 兩端固定設計完全防止沾黏... 46 圖 51 側向沾黏測試懸臂梁及各尺寸標示... 47 圖 52 用 SEM 觀察側是懸臂側向沾黏情形 ... 48 圖 53 若有基底沾黏情形需排除在數據之外... 48 圖 54 每種尺寸不沾黏的機率圖... 49 圖 55 回復力對測試懸臂不沾黏機率的關係圖... 50 圖 56 懸臂梁 K 值對懸臂梁間距關係圖 ... 50 圖 57 基底沾黏測試懸臂梁及各尺寸標示... 51 圖 58 測試懸臂不沾黏的機率對回復力關係圖... 51 圖 59 懸臂寬度對懸臂長度的關係圖... 52 圖 60 尖狀凸起物示意圖... 53
圖 62 同樣退火製程下,4um 厚度的結構較帄坦,感測面積較大 ... 54
圖 63 製作出結構厚度 4um 之加速規,並成功釋放與懸浮 ... 54
圖 64 將固定點擺在靠近內部之感測懸臂,可有較大之重疊面積.... 55
圖 65 SEM 量測實際製程的尺寸 ... 56
圖 66 白光干涉儀(White Light Interference, WLI) ... 57
圖 67 微機電系統動態分析儀(MEMS Motion Analyzer, MMA) ... 57
圖 68 照白光干涉儀的結果與模擬相符,殘留應力呈同心圓分佈.... 58 圖 69 ANSYS 模擬懸吊位置與表面曲率的關係 ... 59 圖 70 白光干涉儀量測結果... 59 圖 71 全重疊的面積為 680um2,而翹曲後的重疊量則約為 600um2 . 60 圖 72 Y 方向(感測軸)頻率響應 ... 61 圖 73 X 方向(非感測軸)頻率響應 ... 61 圖 74 Y 方向頻率響應 ... 62 圖 75 X 方向頻率響應 ... 62 圖 76 線圈型對稱式(左)以及非對稱式(右)懸吊測試模型 ... 63 圖 77 固定懸吊寬度和間距下,對稱式及非對稱式懸吊 K 值比較 ... 63 圖 78 原始尺寸(沒有製程誤差) ... 64 圖 79 製程誤差 0.2um ... 64 圖 80 製程誤差對雙軸共振頻率差值關係圖... 66
第一章 緒論
1.1 研究背景與動機
微機電系統(Micro-Electro-Mechanical Systems, MEMS)在近年來是一個備受 矚目的研究領域,因其具有微小化之優勢、可批次化量產、可結合現有的積體電 路製程以及多樣性的應用範圍,使得這個領域有著無限可能的發展。此系統利用 了半導體製程的沉積、微影、蝕刻等方法來製造出各種可動或立體之奈微米結構, 而藉由微小化及批次量產的特性可以讓產品之生產成本大幅的下降,使得微機電 產品更具有市場發展的潛力。目前市面上已經可以看到許多利用微機電技術所製 作的產品,例如投影機裡的陣列微反射鏡、噴墨印表機的噴墨頭等;而現在許多 3C 產品,如手機、數位相框等,拜微機電系統的微小化以及低成本之賜,也加 入了微加速規來感測使用者的行為,使得冰冷的電子產品,好像有了與人們作互 動的能力!在現今越來越強調人機互動的社會中,微機電產品有了絕佳的發展機 會,而我們甚至可以預見不久的未來,各式各樣裝載著微機電感測器的機器人將 改變以後人類的生活。 慣性感測器如微加速規、微陀螺儀在微機電系統中,算是較早投入市場研發 的產品,早期的應用多在於軍事上的飛彈及太空探索用的導航、汽車安全氣囊或 是全球衛星定位系統(Global Positioning System, GPS)等,而近幾年來則因技術成 熟和成本下降,慢慢的投入到消費性電子產品上的應用。例如現在市面上任天堂 的當紅電視遊樂器 Wii,藉由慣性感測器的體感技術而改變了以往人們的遊戲方 式,打開了遊戲市場上的藍海,成為目前市場上的霸主。這些隨處可見的例子, 再再的表現出其市場應用面已經從早期的軍事國防或是昂貴的產品漸漸發展至
有越來越大的成長空間。從 Wicht Technologies Consulting (WTC) 2004 至 2009 年 MEMS 慣性感測器的市場評估報告[1]中我們可以發現,慣性感測器在市場上總 值超過 13 億美元如圖 1,且加速規在消費性電子市場這一環的年複合成長率達 到了 33%,廣大的慣性感測器市場也成了這次研究主要的動機。 圖 1 2004-2009 MEMS 慣性感測器市場[1] 慣性感測器算是發展許久的產品,其累積技術相當成熟,故為了投入市場競 爭,先了解市場上的情況是必要的。本實驗室針對慣性感測器這一領域,在美國 專利局作了搜尋,在大約 258 篇的相關專利中,美國 Analog Device Inc.(ADI)這 家公司佔了最多的專利篇數(約 38%)如圖 2,且其發展的慣性感測晶片在市場中 也具有相當低的價格,能將各型的加速規與陀螺儀單價壓至 10 元美金以下,並 維持相當好的性能,如加速規 ADXL103、323 系列皆有超過 1kHz 的工作頻寬、 與 300mV/G 以上的靈敏度如表 1[2],所以這次研究方向會以 ADI 公司的產品做 規格的依歸。
圖 2 慣性感測器專利分佈圓餅圖 表 1 ADI, ADXL 系列加速規性能與價格[2] 如前段文所述,ADI 公司之所以能夠成功地佔據慣性感測器大部分市場,乃 在於其公司能開發專屬的製程以整合 MEMS 結構體與 CMOS 感測電路,這需要 製程、電路、結構三分面相互的配合才能達到。在 1994 年以前,大部份的加速 規皆著重於性能的提升,藉由設計或製程上的改良來提升感測器的性能,當時的 觀念仍停留在微機電製程與電路製程分開進行且各自改進,待製作好元件後,再 將感測電路與微機電結構做結合,而往往也正因為結合的製程變異較大,感測器 的性能一直無法增進,成本也無法有效地降低。ADI 在 1994 年提出了整合性製 程 iMEMS(integrated MEMS)[3][4]的觀念,藉由電路製程與 MEMS 製程的交互 進行,成功地降低感測器的製作成本,也將原本兩個不同領域的製程(CMOS 和 MEMS)合併在一起,此整合性的觀念衝擊了市場,也為感測器的製作帶來革命
1.2 文獻回顧
1.2.1 加速規操作原理 圖 3 質量塊運動系統 如上圖 3 所示為一帶有阻尼的質量塊運動系統,當此質量塊受到一外在加 速度時,其運動式與質量、彈簧、阻尼有關,可表示如下式 1;其中 m 為質量塊 的質量(kg),b 為系統等效阻尼(N/ms-1),k 為懸吊系統的彈簧常數(N/m)。 externala
m
kx
x
c
x
m
. .. ... (式 1) 透過 Laplace Transform 將此運動式表示成: 2 0 0 2 1 ) ( ) ( Q s s s A s X ... (式 2) 其中系統共振頻率 m k 0 ,而品質因子(Quality Factor)與系統阻尼、質量 塊、共振頻率有關,當系統工作頻率遠小於共振頻率時可推得質量塊位移量 0 a x ,由此式可看出系統受到加速度時,與其造成的位移成正比的關係,藉由此位移變化造成的電容、電阻或溫度的改變,經由電性的輸出來判斷外在環境給 予加速度的大小,其感測流程如圖 4 所示,此加速度透過質量塊轉換成慣性力 (F=ma),再經由懸吊系統轉換成位移變化(Δx=F/k),此位移變化帶動其餘參數的 改變,最後藉由電路將此改變量讀出,完成加速規的感測。 圖 4 加速規感測流程 1.2.2 加速規感測方式 現今市面上加速規所使用的感測方法主要分為壓阻式、熱汽泡式及電容式三 種,其分別將不同的物理量轉換成可讀出的電子訊號。而電容式加速規是目前市 面上最為常見的感測方法,因其感測方式較不受外在環境因素的影響,且具有高 頻寬的優點。但由於電容式加速規是感測電容變化量來回推加速度,而此電容變 化量非常的小(femto 等級),所以往往需較複雜的感測電路,來做去雜訊和調變 解調的工作。因此設計與製作的複雜度也較其餘兩種感測方式來得高,三種感測 方式之比較如表 2。
表 2 加速規感測原理比較表 從上表可看出壓阻式與電容式相較於熱氣泡式的優勢,且此次研究基於低成 本的考量,考慮以 CMOS 相容性高的感測方式為主,而壓阻式與電容式都可以 有不錯的工作頻寬與靈敏度,但電容式加速規不像壓阻式有感測電阻的存在,所 以有一較大的優點:雜訊會大幅降低,而具有更好的解析度,故綜合上述的優點, 此次研究以電容式加速規為發展的主軸。 1.2.3 電容式加速規的發展 1. MEMS 電容式加速規: 最早製作電容式加速規是使用了 MEMS 的技術,其依製作的方式又可分成 體型微加工(Bulk Micromaching)或面型微加工(Surface Micromaching)兩種,製作 完感測結構後,再配合外加的電路作連接以完成製作,分別以下面兩例為代表; 1990 年 Rudolf 提出的單軸差動對電容加速規[5],由於追求較高的靈敏度(2fF/G), 其使用體型微加工的方式來蝕刻矽以製作出較大的感測質量塊如圖 5(a),並使 用 Pyrex Glass 此種與矽之熱膨脹係數較為接近的材質做為上下電極,利用陽極 接合後完成上下帄行電極板的製作。體型微加工配合陽極接合有成本過高的缺點, 有鑒於此,Crist 在 1995 年嘗試使用面型微加工的方式製作出雙軸的電容式加速 規如圖 5(b)[6],由於電容感測面積較小,且雙軸懸吊系統設計不易,靈敏度(約
1fF/G)無法提升至體型微加工的等級;因此,成本與性能的相互矛盾,讓 MEMS 技術所製作的電容加速規遇到了瓶頸,且最大關鍵在於外加電路至微機電結構需 另外的接線,其伴隨著極大的寄生電容,讓 MEMS 技術提高製作成本的同時, 並無法如預期的讓性能也有效的提升。 圖 5(a) 體型微加工電容式加速規 (b)面型微加工電容式加速規 2. CMOS-MEMS 電容式加速規 由於電容感測方式搭配電路是必要的,相較於 MEMS 製作的電容加速規, CMOS-MEMS 可將原本的電路合併在感測結構附近,此舉拉近了電路與結構體 的距離而大大地減少寄生電容,成本的優勢也因本來就已量產的 CMOS 電路更 加明顯,在量產能力與產品性能可同時提升的情況下,CMOS-MEMS 相對於 MEMS 的優勢是顯而易見的。但也因為結構設計遷就於 CMOS 製程,在各層材 料皆很薄(<1um)的情況下,電容感測面積減少,靈敏度也跟著下降,於是電容式 加速規轉為在 CMOS 製程帄台去做延伸發展,結合了 SOI-MEMS、UV-LIGA、 金屬電鍍(Metal Electroplating)等微機電製程的方式,來解決電容感測面積減少而 靈敏度也跟著下降的問題。以下為一 CMOS 結合 SOI-MEMS 的例子。
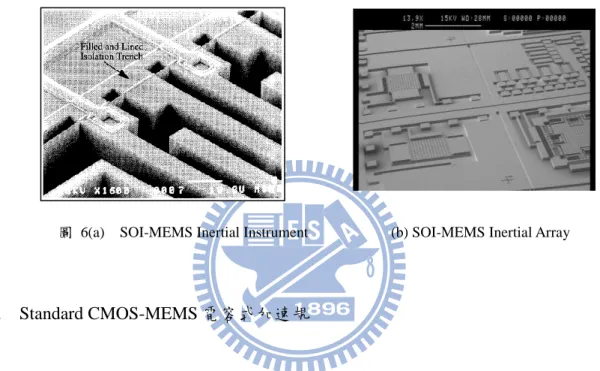
利用 SOI(Silicon On Insulator) Wafer 製作好 CMOS 電路,同時製作感測結構,由 於 SOI 本身的特色造成結構深達 45um,大大提升了電容的感測面積,也由於其 性能表現良好,一直到 2006 年仍有許多發展在 CMOS 帄台上的 SOI-MEMS 提 出改進的製程,如圖 6(b)所示,Hudson 也提出 SOI-MEMS 的慣性感測器[8], 並在 CMOS 帄台上作設計與整合。
圖 6(a) SOI-MEMS Inertial Instrument (b) SOI-MEMS Inertial Array
3. Standard CMOS-MEMS 電容式加速規 前述 CMOS-MEMS 電容式加速規結合其他特殊製程的方式,都是為了要增 加電容的感測面積,以改善 CMOS-MEMS 加速規中靈敏度不佳的特性(~0.5fF/G), 故必頇在原有的 CMOS 製程後再做特殊的後製程,而這些製程改變都會成為增 加成本的變因,於是 2002 年美國卡內基大學 Fedder 實驗室嘗試使用標準的 CMOS 製程製作單軸的電容式加速規如圖 7(a)[9],此設計只需簡單的兩道後製 程(乾蝕刻)以釋放感測結構,若以變動 CMOS 製程多寡來當作判斷標準,Fedder 實驗室此設計可以說是將電容式加速規的製作成本降至最低,其幾乎不去改變原 有的 CMOS 製程,單就設計遷就製程上表現不佳的地方,如圖 7(b)所示為其應 力補償外框設計(Curl Matching),透過此單固定端之應力補償外框的概念,成功 的補償了殘留應力對結構的影響,來得到較多的電容感測面積。
圖 7(a) CMOS-MEMS 單軸加速規 (b) 特殊設計補償電容覆蓋面積
4. 多晶矽 CMOS-MEMS 電容式加速規
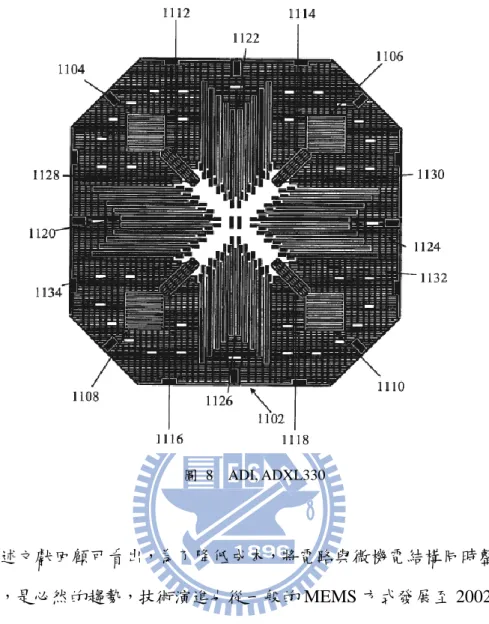
就如同上述的 Standard CMOS-MEMS 電容式加速規,在 CMOS-MEMS 寸土 寸金的觀念下,要在市場上發展產品只能回歸到原始的 CMOS 製程,盡量在設 計上去遷就現有的製程,但也因現在標準的 CMOS 製程如台積電(TSMC) 2P4M CMOS-MEMS,金屬層大多採用阻值較低的材料(Al),其與犧牲層(Oxide)的熱膨 脹係數(CTE)有很大的差異(25 與 0.4 (1/℃)),造成釋放結構後的殘留應力極大, 使得加速規的結構會嚴重翹曲,進而造成最重要的電容感測面積無法有效評估, 此瓶頸也讓電容式加速規的性能無法更進一步的提升。有鑒於此,ADI 公司於 2004 年直接從結構材料上作改善[10],採用多晶矽(polysilicon)來取代標準 CMOS 製程中的金屬(Al),自己開發出一套 Polysilicon-based CMOS-MEMS 製程來製作 加速規如圖 8,結構體厚度達 4um。並藉著多晶矽在材料上與犧牲層(Oxide)熱 膨脹係數接近的特性(2.5 與 0.4 (1/℃)),減少了殘留應力對結構的影響,也將 CMOS-MEMS 的加速規靈敏度提升至 1fF/G 以上。
圖 8 ADI, ADXL330
從前述文獻回顧可看出,為了降低成本,將電路與微機電結構同時整合製作 在晶片上,是必然的趨勢,技術演進也從一般的 MEMS 方式發展至 2002 年標準 CMOS-MEMS,到 2006 年 ADI 自我開發的 Polysilicon-based CMOS-MEMS,改 進也從結構設計回歸到製程的提昇,畢竟以微機電設計去遷就 CMOS 製程所能 提升的幅度有限,故製程開發便扮演了十分關鍵的角色,其穩定性及複雜度會影 響到產品的開發成本與良率,故規劃製程也成為之後非常重要的課題。 1.2.4 電容式加速規懸吊的比較 懸吊的設計在加速規裡一直是一個很重要的課題,因為懸吊決定了加速規主 要的性能:頻寬和靈敏度。並且在雙軸或三軸加速規中,將兩軸的彈簧常數設計 相同,在後期電路解決耦合效應的方便性將會大大的提升。
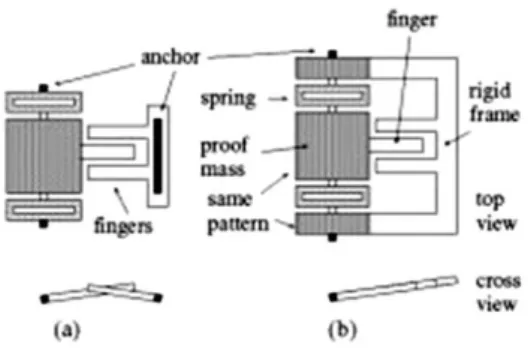
在單軸的設計裡,懸吊的設計相對來說比較簡單,只要考慮非感測軸的彈簧 常數值遠大於感測軸的彈簧常數值即可。在這個前提下,可減小感測軸的彈簧常 數值,來讓靈敏度做最大的提升。而雙軸和三軸的懸吊設計則與單軸相反,必頇 盡量兩軸的彈簧常數值相近甚至相等,以便後期電路解調後可以得到正確的感測 值。在這樣的要求下,如果懸吊在感測質量塊裡的配置為對稱的形式,則可以讓 雙軸彈簧常數完全相等;或是藉由彈簧串接或尺寸設計來盡量讓雙軸彈簧常數值 接近。 Haidar 在 1997 年提出了曲臂懸吊的設計[11]如圖 9,雖然懸吊非完全對稱, 但由於曲臂的尺寸相當,使得雙軸的彈簧常數相差不遠。但此種懸吊無法有效的 利用面積,且曲臂太長也容易受到殘留應力的影響。同年,Mark 則是發表了串 接彈簧的概念[12],做出完全對稱的設計如圖 10,讓雙軸的彈簧常數值完全相 等,但此種設計也有容易受到殘留應力的影響,且有應力集中之隱憂。 圖 9 曲臂懸吊的設計
圖 10 串接不同彈簧的設計
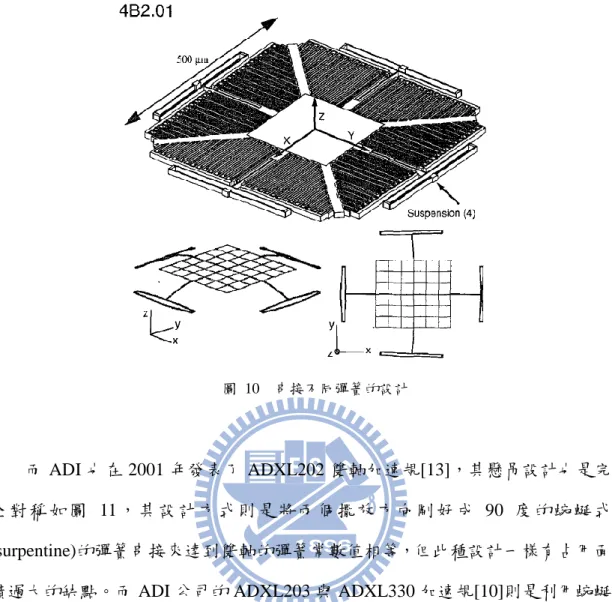
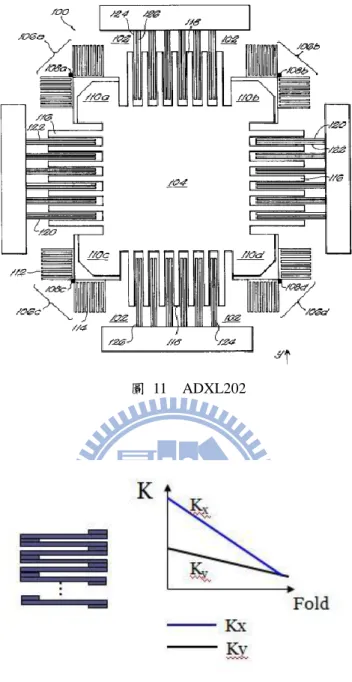
而 ADI 也在 2001 年發表了 ADXL202 雙軸加速規[13],其懸吊設計也是完 全對稱 如圖 11 , 其 設計方 式則 是將 兩個 擺放方 向剛 好成 90 度的蜿 蜒式 (surpentine)的彈簧串接來達到雙軸的彈簧常數值相等,但此種設計一樣有占用面 積過大的缺點。而 ADI 公司的 ADXL203 與 ADXL330 加速規[10]則是利用蜿蜒 彈簧的設計如圖 12,盡量讓雙軸的彈簧常數值接近,來改善 ADXL202 懸吊占 用面積過大的缺點。綜合以上來看,懸吊的設計是一門很重要的學問,所以這也 是這次研究一個主要的方向。
圖 11 ADXL202
1.3 研究目標
此次研究的目標是在開發以多晶矽(polysilicon)為結構,並含新式懸吊的微 加速規,也期望能整合既有的 CMOS 製程,來降低成本且提高量產的能力,並 進而提升加速規的性能。傳統的 CMOS 製程,採用導線層-鋁(Al)來當作結構, 但由於其熱膨脹係數(CTE)與氧化矽的差距很大,造成在製作 MEMS 結構體時, 會因為殘留應力的影響而使感測面積大幅降低,而不易達到我們所想要的規格標 準。於是此次研究在各種半導體材料中,選用了表現較好且低殘留應力的多晶矽 作為結構體材料,來製作出整合電路與結構的加速規感測晶片,並特別在雙、三 軸的微加速規導入新式的對稱線圈型懸吊,來讓雙軸的彈簧常數值相等,並且不 會受到製程誤差的影響。而此種懸吊在三軸加速規裡更是有 z 軸方向剛性更小的 好處(靈敏度更高)。謹條列出此次的研究目標: 1. 採用多晶矽當 MEMS 結構層,並整合 CMOS 製程。 2. 開發單軸加速規。 3. 開發含新式對稱線圈型懸吊之雙、三軸加速規。 而此次的開發規格以 ADI 公司市售的三軸加速規-ADXL330 作為要求的標 準,其靈敏度為 0.7 fF / G、可用頻寬達 1.6kHz、雜訊梯度則為 0.11mg/√Hz。第二章 含新式懸吊之電容式微加速規
2.1 電容式差動對
電容式差動對為最常見的電容式感測方法,由 Rudolf 在 1990 年提出[5],其 可以消除共模的訊號(Common Mode),減少外界環境如溫度、製程變異的影響, 也可提升訊號兩倍,大致可以分為兩種,上下型如圖 13 與左右型如圖 14。 圖 13 上下型差動對 圖 14 左右型差動對 而結構移動的距離(Δx)與電容的變化(ΔC)的關係式可以表示成下式 3 及式 4, 其中ε為空氣介電常數,A 為感測懸臂重疊面積,d 則為感測懸臂間距,t 為感圖 15 感測懸臂示意圖 上下型: 2 2 2 2 d2 x A x d x A C (當 Δx<<d) ... (式 3) 左右型: d x t C 2 ... (式 4) 由上兩式可看出左右型相較於上下型,有完全線性的優勢,且配置同樣的感 測懸臂數目下,左右型具有較多的等效感測對如圖 14。但在 CMOS-MEMS 電 容式加速規中,仍多採用上下型的差動對,主因為 CMOS 製程受限於各層材料 的不同,且熱膨脹係數差異過大,使得結構會嚴重翹曲,所以左右型無法使感測 面積與加速度有相關且正確的趨勢,無法從感測電容上作判讀,如圖 16。 圖 16 左右型差動對無法正確判讀加速度值 所以最後我們選用上下型的差動對,而其推導公式如下:假設忽略掉微弱的 邊緣效應(fringing effect),即電荷會在邊緣部份不均勻的分布現象,電容可表示
成 d A C ,而 C1與 C2為下圖 17 中的兩個相鄰電容。假設質量塊受一加速度 時,會產生一微小位移量 x ,則此微小位移量的變化將造成 x d A C 1 、 x d A C 2 ,則量測到的電容差 1 2 2 2 2 x d x A C C C ,可得: 0 2 2 2 C d
A x C x ... (式 5) 把較小的 2 x C 省略掉,可以得到: C A d x 2 2 ... (式 6) 故所量測到的加速度 a: C A m d k m x k m F a s s 2 2 ... (式 7) 其中 F 為假想力、m 為感測質量塊重量、ks為懸吊彈簧常數,此式可看出加 速度與電容變化的線性關係,藉由感測電路量測電容變化,來得到加速度的值。2.2 概念設計
此次研究目標為單軸及雙、三軸的電容式微加速規,並以 ADI 的 ADXL330 三軸加速規的靈敏度(0.7fF/G)、頻寬(1.6kHz)、解析度(280μg/√Hz)作為設計規 格。 2.2.1 單軸加速規 CMOS-MEMS 製程由於受限於半導體的材料,使得 MEMS 結構釋放完成後, 會有很大的殘留應力,此應力會造成懸吊系統的非線性,也減少了電容的感測面 積,雖然多晶矽比起鋁,殘留應力已經來的小。但殘留應力還是會影響到結構, 故設計上,我們將固定感測懸臂(fixed finger)的固定端(Anchor)放在靠近感測質量 塊中心的位置,觀念類似 Fedder 實驗室 2002 年提出的概念,讓所有固定端盡量 靠近,以避免電容感測面積因翹曲的減少,並配置停止器(Stopper)來防止感測質 量塊過度的位移而短路,而 MEMS 結構佔有面積以 ADI 公司之單軸加速規- ADXL50 為大致標準,在 550 x 550μm 內去作設計如圖 18。 圖 18 單軸電容式加速規概念設計上視圖2.2.2 雙、三軸加速規 如同單軸的設計,一樣把固定感測懸臂(fixed finger)的固定端(Anchor)放在靠 近感測質量塊中心的位置,且將感測懸臂盡量放到感測質量塊四邊上中間的位置, 以減少殘留應力的影響。而雙軸使用同一個感測質量塊,並帶有停止器(Stopper) 防止感測質量塊過度的位移而短路,以及自我測試用的致動器(Actuator)作為自 我校正與測試之用,且為了達到兩軸擁有同樣的靈敏度與頻寬,採用新式對稱線 圈型的懸吊設計,如圖 19,晶片面積則以 ADI 公司之三軸加速規-ADXL330 為標準,在 700 x 700μm 內去作設計。 圖 19 雙、三軸電容式加速規概念設計上視圖
2.3 設計流程
在設計加速規時,有四個最主要的結構:感測質量塊大小、懸吊系統、感測 懸臂及自我測試用的致動器。如圖 20 的設計流程所示,先決定整個結構的面積求之彈簧常數值相近的懸吊,並使用有限元素分析軟體 ANSYS[18]作模擬;接 著決定感測懸臂的尺寸,設計原則為「在最小的佔用面積裡獲得最高靈敏度」, 再針對此懸臂尺寸受殘留應力的影響去做調整,讓其感測出來的電容要能達到甚 至大於規格要求的靈敏度(0.7fF/G),若無法達成,再回去調整懸吊系統的 K 值; 最後則是自我測試用的致動器的設計,以能給予感測質量塊 10G 的加速度為目 標,最後再完成光罩的繪製。 圖 20 電容式加速規設計流程圖
2.4 結構設計
結構設計上大致分成兩個主體,感測質量塊和懸吊系統。 2.4.1 感測質量塊 單軸的感測質量塊,以 ADXL150 單軸加速規[6]0.22μg 的質量塊為參考如 圖 21,為求較大的靈敏度,單軸希望能放上較大的質量塊;雙、三軸則以 ADXL330 的 1.85μg[10]為參考如圖 22,計劃放上差不多大小的感測質量塊, 來做後續的設計。圖 21 ADXL150 圖 22 ADXL330 2.4.2 懸吊設計 懸吊系統的設計決定了加速規結構的剛性(彈簧常數 K 值),而剛性直接的影 響加速規的靈敏度,單軸方面由前述的感測質量塊與頻寬要求,我們可由式 8 決定懸吊系統所需要的 K 值: k
頻寬要求 1.6kHz,取 3 倍的頻寬當作結構所需共振頻率,單軸質量塊 1.59 μg,故單軸懸吊系統 K 值頇大於 1.45 (N/m);而雙軸質量塊 1.77μg,故雙軸懸 吊系統 K 值頇大於 1.94 (N/m)。這裡我們大概可以知道,只要不要將懸吊剛性弄 得 太 小 , 應 該 可 以 達 到 頻 寬 的 要 求 , 所 以 我 們 把 懸 吊 的 設 計 目 標 放 在 與 ADXL330[10]作為比較,其彈簧常數約為 2.1(N/m),所以我們希望在單、雙軸及 三軸的加速規懸吊設計可以較小或是與之相近的值來做為我們產品懸吊系統剛 性的最大要求。 1. 單軸懸吊設計: 此次研究在單軸上採用四個並聯的蜿蜒式(Serpentine)彈簧,其中彈簧常數值 以下列符號標示:K1x,單軸加速規在 x 方向(非感測軸)的彈簧常數;K1y,單 軸加速規在 y 方向(感測軸)的彈簧常數。如前述圖 18 的單軸設計概念,在感測 軸(Y 軸),其單一個彈簧在 y 方向的彈簧常數 K1y 由 Fedder 提出的公式(式 9)[14] 獲得,而各尺寸符號標示如圖 23: ] 3 ) 4 3 [( ) 1 ( ] ) [( 48 2 2 2 2 2 , 1 b n b b n b b n b I E K y z b ... (式 9)
上式 E 為楊氏係數,n 為彈簧的摺疊次數,Iz,b=twb3/12 ,Iz,a=twa3/12,α=Iz,b*a/Iz,a,
圖 23 蜿蜒式彈簧各尺寸符號標示 在盡量不串聯過多彈簧的情況下(串聯越多越佔晶片面積),四個 8 摺式的彈 簧、a=5μm、b=96μm、wa=4μm、寬 wb=2μm、厚度 t=4μm 帶入式 9, 可達成單軸懸吊系統在感測軸(Y 方向)有 K1y = 3.22 N/m 的彈簧常數。其後並以 ANSYS 有線元素分析軟體做驗證,分別以位移分析與模態分析獲得兩軸彈簧常 數模擬值如圖 24 與圖 25。其中位移分析是利用虎克定律( x F k )來獲得彈簧常 數值;而模態分析則是得到在各軸的共振頻率,再配合感測質量塊質量與 0.3714 倍的懸吊系統質量當作整個系統的等效質量[18],來得到彈簧常數( m k ),兩 個模擬感測軸彈簧常數的結果分別為 3.69 與 3.77 (N/m),和理論值 3.22 有約 15% 的誤差。
圖 25 模態分析得 K1y=3.77 N/m K1x=18.8 N/m 2. 雙、三軸懸吊設計: 此次研究在雙、三軸上,採用新型的對稱式線圈型(coil)彈簧,這種設計主 要的好處,在於讓結構對原點成 90 度的點對稱,而確保 X 向與 Y 向的彈簧常數 值可以完全相等,比起 ADXL330 的蜿蜒式彈簧的設計,在差不多的彈簧常數值 下,有著較小的面積以及雙軸的彈簧常數值完全相等的好處,表 3 為同尺寸下, 兩種設計的比較。 表 3 同尺寸下,兩種彈簧設計的比較 雙、三軸加速規的彈簧常數值以下列符號標示:Kx,雙、三軸加速規在 x
方向的彈簧常數;Ky,雙、三軸加速規在 y 方向的彈簧常數;Kz,三軸加速規 在 z 方向的彈簧常數。由於這種新式的懸吊尚沒有公式解,所以我們使用 ANSYS 有限元素分析模擬的方法,來得到我們的彈簧常數值,同樣也是以模態分析與位 移分析來模擬。而我們先模擬出懸吊寬度(width, w)、懸吊間距(gap, g)和懸吊折 數(folds, n)與彈簧常數值(K)的關係圖,各尺寸示意圖如圖 26,接著由這些關係 圖來找到最接近我們需求的設計參數(彈簧常數約為 2.1N/m),如圖 27、圖 28 及圖 29。 圖 26 懸吊寬度與懸吊間距示意圖 圖 27 彈簧摺數對 K 值的關係
圖 28 彈簧 7 摺下,寬度對 K 值的關係 圖 29 彈簧 7 摺下,間距對 K 值的關係 3. Z 軸塌陷: 在設計加速規時,為了達到比較高的靈敏度,我們會盡量將 Kx、Ky 降低, 而卻也可能同時降低了在 Z 方向的彈簧常數 Kz,在當結構受到重力或嚴重 Z 軸 加速度時,會造成結構與其下方的導線短路。故 Z 軸的塌陷希望維持在結構與 基底距離(2um)的 5%以內(100nm),則 Kz 需控制在 0.8 N/m 以上,才可確保在靜 態時,因重力的影響下,不會下陷超過 100nm,此部份亦由有線元素分析來達成。
2.4.3 系統頻寬 由前述我們知道,只要不要將懸吊剛性弄得太小,應該就可以達到頻寬的要 求。而頻寬代表著產品可應用的範圍如表 4[4],所以結構頻寬當然會希望越大來 使產品可應用範圍更廣。但頇注意的是若頻寬越大,則在同樣質量塊的重量下, K 值也會越大,而使得靈敏度下降。所以我們先大概模擬單、雙軸的共振頻率, 取其振福前面較帄的頻率(約為 1/3 處)為其頻寬,而為了達到比較高的靈敏度, 所以我們可以由圖 30(a)(b)看出目前結構頻寬比預設目標來的小。 表 4 各產品應用頻寬[4]
2.5 懸臂設計
在決定感測質量塊與懸吊的尺寸後,接著就是感測懸臂的設計,由於此部分 也是直接影響到靈敏度的大小,所以也算是設計的重點之一,以下會先討論靈敏 度的公式;接著考慮因殘留應力影響下,感測面積的改變;最後利用靈敏度的公 式關係,導出感測懸臂電容差動對的最佳數目,來得到最大的靈敏度。 2.5.1 靈敏度 當加速規受到外在 1G 的加速度時,會有位移量Δd,設此時之電容變化量 為ΔC,如下圖 31 所示,則我們可以得到: C1 改變: d d C C t L C 0 0 1 ... (式 10) C2 改變: d d C C t L C 0 0 2 ... (式 11) 其中ε為介電常數,L 為感測懸臂長度,d 為感測懸臂間距,t 為感測懸臂 厚度。所以我們可以得到靈敏度,即上兩式相減: Sensitivity= ) 2 ( ) 1 1 ( 2 0 0 2 2 2 1 d d d t L d d d d t L C C C ... (式 12)圖 31 加速規受 1G 加速度時示意圖 2.5.2 翹曲量 圖 32 感測懸臂因結構釋放而翹曲 由於受到殘留應力的影響,在釋放結構時,結構可能因此而翹曲,所以我們 必需估算翹曲量對於我們靈敏度的影響。首先我們假設殘留應力從結構下表面到 結構上表面為線性遞增如圖 32,並由 Senturia[4]提出的公式一如式 13,在藉由 公式二如式 14: 公式一: 1 ) 1 ( 2 1 E t ... (式 13)
公式二: 2 2 2 2 2 ] ) ( 1 [ ) ( 1 x z x z x z x ... (式 14) 來得到懸臂長度與翹曲量的關係式: 2 1 ) 1 ( x t E z ... (式 15) 由上式 15 可看出在同樣的殘留應力下,懸臂長度(x)越長,懸臂的翹曲量(z) 也會隨之增加,圖式如圖 33,其中ρ為曲率半徑、E 為楊氏系數、ν為浦松比、 t 為結構厚度、σ為殘留應力大小。 圖 33 感測懸臂翹曲示意圖 而為了減少殘留應力造成懸臂翹曲,使得我們感測面積受到影響而重疊面積 減少,如圖 34 所示,我們將感測懸臂的固定端由外面改成裡面(靠近感測質量塊), 讓整個加速規的固定端盡量靠近,這樣當受殘留應力的影響時,結構會往同樣的 方向翹曲,可以得到比較大的重疊面積。而當我們以這種設計時,考慮結構翹曲 量,因為感測質量塊的固定端與固定懸臂的固定端不是同一個,所以造成感測面 積還是會有些微的減少,而當 z << L 時,其感測面積如式 16 及圖 35 所示。
圖 34 將感測懸臂的固定端由外面改成裡面(靠近感測質量塊)
L
z
t
A
overlap L L s
(
)
... (式 16) 圖 35 受翹曲的影響下的感測面積 2.5.3 感測懸臂尺寸及數目的決定 我們將利用靈敏度與感測懸臂差動對的數目的公式關係,來決定感測懸臂差 動對的數目與最後質量塊的大小。首先靈敏度的公式如下,其中ε為介電常數、 N 為差動對數目、m 為質量塊重量、k 為彈簧常數、d 為感測懸臂間距、G為重 力加速度=9.8m/s2: A G m N y Sensitivit 2 而我們知道,當固定晶片的面積,感測懸臂差動對的數目增加可以增加靈敏 度,但也會減少質量塊的大小,其關係式如下:
) (Adie Asuspension Afinger t V m ... (式 18) 其中 Afinger 我們可以藉由下述公式計算,符號標示如圖 36,其中 w 為感 測懸臂寬度,N 為差動對數目,d 為感測懸臂間距:
N d N w
L Afinger2 sus 3( 1) (3 2) ... (式 19) 圖 36 感測懸臂所佔面積符號示意 最後將式 19 帶入式 18 再帶入式 17,我們可以得到感測懸臂差動對數目與 靈敏度的關係式如下: overlap sus suspension die A d k G w N d N L A A t N y Sensitivit 0 2 ]) ) 2 3 ( ) 1 ( 3 [ 2 ( ... (式 20)由式 20 我們可以看出感測懸臂差動對的數目與靈敏度為二次關係式,所以 我們將可以得到一個極值 N 來得到最大的靈敏度。
2.6 致動器
為了方便後期的校正與測試,我們設計了自我測試用的致動器在加速規的周 圍,利用靜電力來驅動我們的質量塊。兩電容板(圖 37)間的靜電力公式如下: 2 0 2 0 2 1 V d L t F ... (式 21) 圖 37 兩電容板示意圖 其中ε為介電係數、d 為兩板間距、L 為重疊長度、t 為結構厚度、V 為外 加電壓。在此外加電壓 3V 到致動器的作用下,我們希望可以提供感測質量塊 5G 的加速度,以便做校正與測試。而最大的致動力 Fmax 會出現在致動器與感測質 量塊的間距最小的時候,也就是致動器與質量塊的間隔和停止器與質量塊的間隔 相減的距離。而致動器與停止器的配置如圖 38。... (式 22)
圖 38 致動器與停止器的配置圖
2.7 尺寸規劃
1. 單軸加速規:
單軸的尺寸規劃如圖 39 所示,面積大小為 550umX550um,而蜿蜒式彈簧 的寬度為 2um,間距為 3um,長度為 100um;感測懸臂長度為 168um、寬度為 3um、間距為 1.5um,共 38 對;感測質量塊則是重 1.59ug;停止器間距 0.8um。
(1)懸吊 K1y(< 2N/m):理論解析 3.22N/m,ANSYS 位移分析為 3.69N/m、模 態分析為 3.77N/m,雖有誤差,但都有在規格內。 (2)頻寬(>1.6kHz):約為 800Hz。 (3)靈敏度(> 0.7fF/G):Sensitivity=0.85 fF/G,也有達到規格。 2. 雙、三軸加速規: 雙、三軸加速規的尺寸規劃如圖 40 所示,面積控制在 700umX700um 以內, 而對稱式線圈型彈簧的寬度為 2um、間距為 3um、最外圈長度約為 80um;感測 懸臂長度為 168um、寬度為 3um、間距為 1.7um、厚度為 4um,共 32 對;感測 質量塊則是重 1.77ug;致動器間距 1.2um、停止器間距 0.8um。
Kz=1.6N/m;模態分析得 Kx=Ky=2.21 N/m;Kz=1.6N/m,雖有誤差,但 也都有在規格內。
(2)頻寬(> 1.6kHz):約為 1kHz,為求高靈敏度而小於目標規格。
(3)靈敏度(> 0.7fF/G):X、Y 軸之 Sensitivity=1.7 fF/G,Z 軸=4.56 fF/G。
第三章 製程與封裝
3.1 製程規劃
此次研究的開發製程以多晶矽(polysilicon)當作結構體,如前面章節所述, 由於多晶矽的熱膨脹係數與氧化矽(犧牲層)相近-多晶矽為 2.5(1/℃)、氧化矽為 0.4(1/℃),故具有低殘留應力的特性。在製程上,為了降低成本而採用 HF 濕蝕 刻製程來釋放結構,且因為 HF 對多晶矽與氧化矽的選擇比高,所以結構不易被 攻擊,可成功實現低成本、高性能的電容式加速規。 主要結構共計有三層多晶矽層如圖 41,第一層當訊號線,第三層作為結構 層,第二層則是幫助結構站在基底上,且多此層可以做更多設計上的延伸變化(如 三軸以及導線)。晶片上分為 CMOS 電路與 MEMS 結構兩個區塊同時進行,兩 區 域 大 概 相 距 500um 以 方 便 後 端 封 裝 製 程 的 進 行 , 先 在 Si 晶 圓 上 實 行 STI(shallow trench isolation)來作絕緣,掏掉 0.5um 的基底並填滿氧化矽,以拉大 MEMS 結構與基底的距離,降低寄生電容(a),沉積 CMOS 電路所頇的 Gate Oxide(b),沉積並定義出電路所頇用的 Poly1,此 Poly1 負責將 MEMS 結構的訊 號送至 CMOS 電路裡(c),定義出第一層 Nitride 供 Poly2 站住的空間,並保護底 下 Poly1 導線(d),沉積並定義 Poly2(e),沉積氧化層並定義抗沾黏的突起物 (bumps)(f),定義 Contact 至 Poly1 或 Poly2(g),沉積 4um 厚的 Poly3 作為電容加 速規的結構體及感測懸臂(h),定義 CMOS 電路的 Contact(i),沉積金屬線(W 和 Al)以供打線及傳輸訊號(j),沉積 Oxide 與保護層 Nitride 並定義 MEMS 結構的區 域(k), HF 濕蝕刻以釋放機械可動結構(感測懸臂、質量塊)(l),最後以 RIE 打穿3.2 封裝
封裝是微加速規最難的課題,封裝的壓力大小影響加速規的性能甚巨,封裝 壓力越低,空氣造成的阻力越小。故製程規劃前頇事先知道封裝的需求以納入製 程的考量。此次封裝採用日月光(ASE)的 Si Cap 與 Glass Frit 如圖 42,其大致流 程如下:
(1)蝕刻 Silicon Cap (2)沉積 Glass Frit (3)與 MEMS 結構熔接
(4)晶片切割 (5)打線
而使用玻璃膠來作熔接的主要有以下幾項優點:表面粗度要求低,與多種不 同的表面皆相容;可直接在封蓋上做導線(Feed through);可在晶片切割前就作封 裝(wafer level bonding);封裝溫度中等 ( 350 ~ 450 ℃);密封性高 (對於 MEMS 結構特別重要)。但採用此玻璃膠黏合,從電路至結構頇預留約 500μm 的空間 如圖 43,此亦納入後續製程規劃的考量。
第四章 製程與量測結果
4.1 製程問題
在製作微加速規結構時,由於合作廠商之前也未曾製作這樣大尺寸且厚的 MEMS 結構,所以其實碰到許多問題,如多晶矽結構與 CMOS 製程整合性、PAD 的保護、殘留應力造成嚴重的結構翹曲、濕蝕刻釋放結構造成沾黏等。而在這些 問題之中,則屬殘留應力影響以及結構沾黏最為嚴重,且最難解決,所以將於接 下來的小節討論,希望能建立一個退火製程對殘留應力影響的資料庫以及訂出一 個可避開沾黏問題的設計規則。 4.1.1 退火製程與結構殘留應力 經由第三章所述之製程流程製作之加速規,若是沒有經過退火製程,則其殘 留應力會使感測質量塊及感測懸臂變形,呈現一極大的壓應力,使感測質量塊中 心會嚴重拱起,四個角落頂到基底如圖 44,而感測懸臂懸浮端則會頂到基底。 這樣製作出之加速規會嚴重變形且觸底,而完全無法作動。 所以希望藉由退火製程,期待可以使整個多晶矽結構的晶格重新排列,釋放 其殘留應力,盡量讓整個結構做到帄坦,而不會因受殘留應力影響而觸底或是嚴 重翹曲。 由於 2um 厚度的多晶矽結構製作較快,所以以此厚度做實驗來測試。
圖 44 未經退火,質量塊因殘留應力影響嚴重拱起。
由於我們希望在較短的時間內完成整個加速規的製作,所以退火製程使用快 速高溫退火(Rapid Thermal Annealing, RTA)的方式。而一開始,嘗試了先固定溫 度,然後改變退火的時間來做比較,即使用 1030 度的溫度,10 秒、15 秒和 20 秒的時間。我們可以發現在這樣的高溫之下,時間越久,殘留應力會由負轉正, 並繼續變大再趨於帄緩,如圖 45 所示。而其中,15 秒的時間做出來的應力最接 近於零,非常帄坦,呈現些微的張應力(tensile stress)。
接著,則嘗試了固定退火時間 20 秒,而改變退火的溫度來做比較。即使用 20 秒的時間,1030 度、1050 度和 1100 度的溫度。我們可以發現在同樣退火時 間之下,溫度越高,則應力也越來越大,如圖 46 所示。而其中溫度 1030 度是 做出來最接近零的,其他溫度則會使應力又過大。 圖 46 在退火製程時間不變下,退火溫度越高,則應力也越來越大 最後我們可以由前面不同時間和溫度的退火製程,來得到一些結論:在同樣 退火製程溫度下,退火時間越久則應力會越來越大;而同樣時間下,退火溫度越 高則應力也會越來越大。所以我們可以從這些溫度和時間再做不同的組合,並找 到一個最適合的溫度及時間,將殘留應力調整到最接近於零,來讓感測懸臂的重 疊面積達到最大。 4.1.2 沾黏現象及抗沾黏設計 由於我們釋放結構是使用 HF 溶液來蝕刻犧牲層-二氧化矽,後段還頇經由
成的沾黏現象。由於液體的表面張力在微觀的世界裡,變成是一個不可忽視的力, 而當我們釋放結構時,液體的表面張力大到足夠可以將兩個相鄰的感測懸臂拉在 一起,並且如果這個力道足以將其拉到一個非常小的距離,而使表面力開始作用, 則當液體乾掉時,黏在一起的懸臂還是無法回復,此現象我們稱為沾黏的現象。 而在加速規結構的沾黏裡又分為:感測質量塊與基底的沾黏、感測懸臂與基 底的沾黏和感測懸臂間的側向沾黏。抵抗沾黏的方法有許多種,其中較快速又適 合我們使用的製程方法,大概就是使用直接乾蝕刻來替代濕式蝕刻或用臨界點乾 燥機(CO2 Critical Dryer)來避開液體的表面張力;而在結構設計上抗沾黏的方法, 則會在表面上加一個抗沾黏凸起物(bump),讓兩個接觸面積變小,使表面張力變 小,而減少沾黏的力量。目前乾蝕刻較無法進行,臨界點乾燥機也沒有可使用來 量產的機台,故我們只能先從結構設計下手,加上抗沾黏凸起物。 為了防止感測質量塊與基底的沾黏,我們在感測質量塊的下方,加上了抗沾 黏凸起物的設計,其高度為 2500A,在這樣高度下,製作出的加速規還是會有基 底沾黏的現象,如圖 47。所以我們試著去加深凸起物的高度,讓感測質量塊與 基底的距離拉長,來減少沾黏的機會。於是嘗試了 6000A 和 10000A 高度的凸起 物,成功的抵抗感測質量塊與基底的沾黏,使其順利懸浮,如圖 48,而之後我 們將使用 6000A 的抗沾黏凸起物,為三軸加速規的製作保留感測質量塊與基底 的空間。
圖 47 質量塊與基底沾黏 圖 48 加高抗沾黏凸起物到 6000A 使結構成功懸浮 而為了防止側向沾黏,我們這邊也提出了兩個設計上的方法。首先是在懸臂 前方懸浮的地方,加上側向的凸出鋸齒,來抗側向沾黏,如圖 49 所示,其如同 對基底的抗沾黏凸起物一樣,藉由接觸面積的減小來降低沾黏力。而如果要完全 的防止側量沾黏的情況發生,我們可以使用感測懸臂兩端固定的設計,讓懸臂完 全定住而不會有沾黏的情況,如圖 50,唯這種設計懸臂一樣不能太長,否則沾 黏會發生在懸臂的中間。
圖 49 鋸齒設計抗側向沾黏 圖 50 兩端固定設計完全防止沾黏
4.2 抗沾黏規則
由於前述的設計方法我們只能盡量的減少沾黏的情況,而為了可以找到一個 準則來避免沾黏的現象,我們希望可以找到一個設計規則。 這裡我們設計了許多組測試的懸臂梁,想知道在不同尺寸下,懸臂梁沾黏的 情形。這之中又分為側向沾黏以及基底沾黏,將這些測試懸臂梁的到的資料庫來 整理出一個設計規則,而希望若是照著這個設計規則來製作產品,就可盡量的避免結構的沾黏,這樣以後設計有一準則,設計起來也可有個參考。 4.2.1 抗側向沾黏規則 側向沾黏部分,我們藉由不同尺寸的測試懸臂來建立一資料庫,我們知道會 造成感測懸臂沾黏的主因,為懸臂本身剛性所提供的回復力無法克服沾黏力,而 此回復力主要有三個變數,即懸臂的長度(length)、寬度(width)及間距(gap),如 下圖 51 所示。若長度越短、寬度越寬,則其感測懸臂的剛性越高(彈簧常數 K 值大),應較不易沾黏;而間隙越大,懸臂沾黏時的形變量就越多,則相對來說 產生的回復力就較大,越不易沾黏。 圖 51 側向沾黏測試懸臂梁及各尺寸標示 在經過濕蝕刻釋放結構後,我們利用 SEM 觀察每根測試懸臂側向沾黏的情 形如圖 52,每種尺寸下有 10 根。其中若是有基底沾黏則必頇排除在數據之外, 確保樣本數正確,如圖 53。
圖 52 用 SEM 觀察側是懸臂側向沾黏情形 圖 53 若有基底沾黏情形需排除在數據之外 經過 SEM 觀察並記錄結果後,我們將每種尺寸不沾黏的機率,製成如下圖 54,X軸為懸臂長度、Y 軸為不沾黏的機率,而其中機率為 1 就代表完全沒沾黏, 而懸臂寬度則由不同顏色的線來表示,並用懸臂間距分為 1.4um、1.8 um、2.2 um 及 2.6 um。由此圖可以看出,懸臂長度(Length)越長,則沾黏機率越大;寬度(Width) 越短,沾黏機率越小;間隙(Space)越小,則沾黏機率也越大。
圖 54 每種尺寸不沾黏的機率圖 而將所有不同尺寸的測試懸臂參數,藉由 ( ) 4 3 3 gap space L w t E F ,我們可 全部換算成回復力,其中 E 為楊氏係數、t 結構厚度、w 為懸臂寬度、L 為懸臂 長度、space 則為間距,即可得到下圖 55,即回復力對不沾黏機率的關係圖,圖 中每一個點都代表一個尺寸換算的回復力。而由此圖我們可以在完全沒有沾黏的 組合裡,找出一最小的回復力,這就是我們抗側向沾黏的最佳設計規則。 而我們從此資料裡面找出之最小回復力為 2.23uN,將此訂為我們側向抗沾 黏的設計規則後。由於懸臂間距影響靈敏度最大,所以我們可利用懸臂梁彈簧常 數值對懸臂間距做圖,如圖 56,可得到 2.23uN 這個回復力的曲線,故我們可以 先固定一個間距(訂出想要的靈敏度範圍),並設計懸臂梁的彈簧常數值尺寸落在 此曲線之上,即可達到不會有沾黏的現象。
圖 55 回復力對測試懸臂不沾黏機率的關係圖 圖 56 懸臂梁 K 值對懸臂梁間距關係圖 4.2.2 抗基底沾黏規則-感測懸臂 基底沾黏部分,同樣我們利用不同的測試懸臂來建立其設計規則:改變懸臂 的長度(length)及寬度(width)。與抗側向沾黏不同的是由於懸臂梁與基底的距離(d) 是固定的(2.2um),所以沒有懸臂間距(space)這項變數,而我們設計之抗沾黏凸起 物的尺寸為 1.4um*1.4um,如下圖 57 所示。同樣將這些不同尺寸的測試懸臂換 算成回復力,其中沒有沾黏的最小回復力,就是抗基底沾黏的最佳設計規則。
圖 57 基底沾黏測試懸臂梁及各尺寸標示 同樣經 SEM 觀察並記錄結果,將每種尺寸不沾黏的機率對回復力做圖,如 圖 58 所示,找出最小回復力為 2.63uN,將此定為我們基底抗沾黏的設計規則。 圖 58 測試懸臂不沾黏的機率對回復力關係圖 由於懸臂梁至基底的高度(d)為定值,故利用前述找到之最小回復力,再除 以此高度,即可得到抗基底沾黏所需之最小彈簧常數(Ksubstrate),就可以藉由下式 23 找到懸臂長度及寬度的關係,所以在抗基底沾黏的設計裡,每種懸臂寬度都 可以有一相對應的長度:
3 substrate 3 3 3 substrate 4 4 E t K L w L t w E K ... (式 23) 其中 E 為楊式係數、w 為懸臂寬度、t 為懸臂厚度、L 為懸臂長度。再由上 式關係可做出懸臂寬度對懸臂長度的關係圖,如圖 59,一樣只要尺寸做在此關 係線之上,就可避免基底沾黏。 圖 59 懸臂寬度對懸臂長度的關係圖 4.2.3 抗基底沾黏規則-感測質量塊 我們知道,沾黏的力量最後為兩接觸的表面力所作用,而此表面力則與接觸 面積有關,則我們可以藉由前述的資料找出單位面積下的沾黏力,如下式 24:
Force per area:
6 2 1.3418 10 ) 4 . 1 ( 63 . 2 um uN area force ... (式 24) 藉由此式子的結果,我們可以計算所有抗沾黏凸起物所產生的沾黏力,只要 讓感測質量塊Z方向懸吊的回復力大於此沾黏力,即可達到感測質量塊抗沾黏的
效果。所以這裡可以歸納幾個可以減少表面力的方法:首先是凸起物與基底接觸 面積減小,這部分又可分為兩種方法,一種是將尺寸做的更小,另一種則是藉由 製程將凸起物底端做為尖狀,讓接觸面積減到最小,如圖 60;再來是放大凸起 物之間的距離,這部分頇考慮也不能距離太遠,不然沾黏將發生在兩個凸起物之 間;最後則是將質量塊與基底的距離再拉大。 圖 60 尖狀凸起物示意圖
4.3 製程結果
藉由前述規劃的製程來製作加速規,若未經退火製程則其殘留應力會非常大, 而經過適當溫度及時間的退火製程後,我們可看到殘留應力由非常大的壓應力釋 放而成些微的張應力,如下圖 61 所示。而在結構厚度方面,也嘗試製作 2um 以及 4um 厚度的結構,但在同樣的退 火溫度和時間下,4um 比起 2um 可以有更帄坦的結果,如圖 62,這可以讓感測 面積較不受殘留應力的影響;且 4um 對於 2um 的感測面積可以更大,靈敏度可 以更容易提升,所以最後還是選用了 4um 的製程。而最後也成功的製作出結構 厚度 4um 之結構,並成功釋放並懸浮結構如圖 63。 圖 62 同樣的退火製程下,4um 厚度的結構會較帄坦,且感測面積也較大 圖 63 製作出結構厚度 4um 之加速規,並成功釋放與懸浮 4.3.1 補償殘留應力設計之結果 從製作的結果可看出,將感測懸臂的固定點放在感測質量塊的內側(靠近感 測質量塊的固定點),的確可以補償一些因為殘留應力所造成之感測面積的損失,
讓可動感測懸臂與固定感測懸臂一起往同一方向翹曲,達到最大的感測面積,如 下圖 64 所示,左圖固定端放在靠近外側,右圖則是放在靠近內側。 圖 64 將固定點擺在靠近內部之感測懸臂,可有較大之重疊面積 4.3.2 實際製程尺寸 由於製程上的誤差,所以可能實際製程尺寸會與光罩設計的尺寸會有些不同, 而此些微的不同,可能就會影響加速規甚鉅,例如在懸吊的部分,可能改變一些, 就會造成設計的尺寸跑掉,而讓實際靈敏度與設計不同;又在沾黏部分,可能因 為與設計尺寸不同,使得原本設計可以達到不沾黏的感測懸臂,會有沾黏的現象。 而我們找了五個點,使用 SEM 量測實際製程的尺寸如圖 65,並與原來設計尺寸 做比較,可以發現帄均大概小了 0.22um,如下表 5 所示。
圖 65 SEM 量測實際製程的尺寸
表 5 Layout 設計尺寸與實際製程尺寸比較表 (μm)
4.4 量測結果
結構量測至國家晶片中心(CIC)[16]量測,並分為靜態以及動態的量測。靜態 的部分使用白光干涉儀(White Light Interference, WLI)如圖 66,其是利用干涉條 紋來量測結構出帄面(out-of-plane)的位移量,且是一種非接觸的量測,不會破壞 到試片。而量測此物理量的目的,如前述主要建立此製程中結構與感測懸臂尺寸 其翹曲量的資料庫,並從翹曲量判斷殘留應力的大小。
圖 66 白光干涉儀(White Light Interference, WLI)
動態量測的部分則是使用微機電系統動態分析儀(MEMS Motion Analyzer, MMA)如圖 67,其藉由一壓電致動器來激振試片,再用 CCD 做影像擷取,並由 電腦計算出其影像位移量,來跑出結構之頻率響應。而藉由頻率響應的表現,我 們進而可以推算懸吊系統的彈簧常數值,並與理論做驗證。
4.4.1 結構靜態量測 藉由國家晶片中心(CIC)的白光干涉儀,我們可以使用非接觸式的量測結構 表面的曲率或結構的翹曲量。而將量測加速規感測質量塊的白光 3D 圖與之前使 用 ANSYS 模擬做比較,可以發現殘留應力為一同心圓的分佈,如下圖 68 所示。 圖 68 照白光干涉儀的結果與模擬相符,殘留應力呈同心圓分佈 而接著則要討論懸吊的擺放位置離整個感測質量塊中心的遠近,是否會影響 殘留應力而造成表面的曲率不同,我們先用 ANSYS 模擬下手,做出彈簧固定點 距離中心 100um、150um、200um 以及 250um 的位置,我們發現改變彈簧固定 點的位置並無法影響表面的曲率,但會影響整個表面的高度,也就是表面都會是 同一個曲率,但固定點越外面,則高度會越低,如圖 69。而由白光干涉儀量測 出來的結果也是大致符合,但因為實際上感測質量塊與基底是固定的間隔,所以 當感測質量塊太低時會撞到基底,所以高度會變成一樣,如圖 70。
圖 69 ANSYS 模擬懸吊位置與表面曲率的關係
圖 70 白光干涉儀量測結果
而量測感測懸臂翹曲的情形,可以用來估算感測懸臂的有效重疊面積。我們 由白光干涉儀量測的結果,若殘留應力在 10MPa 時,重疊面積大概可以到原本 全部的 88%左右如圖 71,故殘留應力小於 10MPa 都在我們可接受的範圍內。
圖 71 全重疊的面積為 680um2,而翹曲後的重疊量則約為 600um2
4.4.2 結構動態量測
這 邊 主 要 藉 由 國 家 晶 片 中 心 (CIC) 的 微 機 電 動 態 分 析 儀 (MEMS Motion Analyzer, MMA)來量測加速規結構的模態響應,進而換算成彈簧常數來跟模擬作 比較,並且在雙軸加速規部分,來驗證對稱式懸吊的雙軸共振頻率相等。 而在機台參數設定的部分,我們使用 10 倍的鏡頭,並給予壓電致動器 30V 的正弦波訊號,取 15 個 phase 作量測。 單軸加速規部分,Y 方向(感測軸)量測到之共振頻率為 5500Hz,如圖 72 所 示,而 ANSYS 模擬之值為 7800Hz;而 X 方向(非感測軸)量測到之共振頻率為 13000Hz,如圖 73 所示,模擬之值則為 17300Hz。由於單軸加速規希望盡量減 低耦合效應,所以會將感測軸與非感測軸之共振頻率拉大,而感測軸方向之彈簧 常數值會比較小,其共振頻率也較小。而實際量測與模擬有段差距,則是推測可 能有如下誤差:模擬材料參數設定(楊式係數、浦松比、密度等)、製程誤差、殘 留應力、模擬模型等。
圖 72 Y 方向(感測軸)頻率響應
圖 73 X 方向(非感測軸)頻率響應
雙軸加速規部分,這邊由於雙軸加速規使用線圈型對稱式懸吊,所以預期雙 軸之彈簧常數值會相等,即共振頻率也會相等。而量測結果,Y 方向為 3700Hz
Y 方向也一樣為 5200Hz。所以證明使用對稱式懸吊時,雙軸之共振頻率可以完 全相等,即彈簧常數值應為一樣。唯實驗結果與模擬還是有誤差存在。
圖 74 Y 方向頻率響應
4.4.3 對稱式懸吊與非對稱懸吊比較 為了更進一步驗證線圈型對稱式懸吊,我們設計了懸吊的測試模型,其都採 用了線圈型的設計,但藉由擺放方式的不同而分為對稱式以及非對稱式,如圖 76, 對稱式懸吊因為其對整個質量塊的中心為一 90 度的點對稱,故雙軸的彈簧常數 會永遠相等,且不會因為製程因素而有改變。而在尺寸設計上,因其為幾何上的 對稱,所以任何尺寸設計都可以達到雙軸相等;但在非對稱式的部分,其雙軸的 彈簧常數則必頇靠尺寸上的設計來讓雙軸相等,例如必頇在一個固定的懸吊寬度 和間距之下,找到一特定的摺疊數來得到雙軸相等的數目,但這很容易因為製程 因素而跑掉使得雙軸彈簧常數值又有差異,如圖 77。 圖 76 線圈型對稱式(左)以及非對稱式(右)懸吊測試模型 圖 77 在固定一懸吊寬度和間距下,對稱式及非對稱式懸吊 K 值比較
懸吊的測試模型部份,我們規劃了寬度 2um、間距為 3um 並且纏繞 7 圈的 懸吊,來定義為原始沒有經過製程誤差的值如圖 78,而另外畫了差距 0.2um 以 及 0.4um 的光罩來當作經過製程誤差的值。這邊所謂製程誤差 0.2um 代表寬度變 成 2.2um,但間距變成了 2.8um,如圖 79 所示。 圖 78 原始尺寸(沒有製程誤差) 圖 79 製程誤差 0.2um 我們預期對稱式懸吊雙軸的共振頻率將會相等,且不會受製程誤差的影響; 而非對稱式懸吊則不會完全相等,且會因製程誤差影響而有差距。並使用 ANSYS 分別做各種尺寸的模擬,這裡並考慮到實際製程誤差:用 SEM 量測過每個懸吊
![圖 2 慣性感測器專利分佈圓餅圖 表 1 ADI, ADXL 系列加速規性能與價格[2] 如前段文所述,ADI 公司之所以能夠成功地佔據慣性感測器大部分市場,乃 在於其公司能開發專屬的製程以整合 MEMS 結構體與 CMOS 感測電路,這需要 製程、電路、結構三分面相互的配合才能達到。在 1994 年以前,大部份的加速 規皆著重於性能的提升,藉由設計或製程上的改良來提升感測器的性能,當時的 觀念仍停留在微機電製程與電路製程分開進行且各自改進,待製作好元件後,再 將感測電路與微機電結構做結](https://thumb-ap.123doks.com/thumbv2/9libinfo/8400516.179199/15.892.223.676.138.351/以整合互的配合才能達到年以前大部份加速進行且各自改進待製作.webp)