Volume 22, No.1, 2017, pp. 23-31 DOI 10.6574/JPRS.2017.22(1).3
1國家實驗研究院 國家太空中心飛行控制組 副研究員 收到日期:民國 104 年 12 月 15 日
2國家實驗研究院 國家太空中心飛行控制組 研究員 修改日期:民國 105 年 05 月 03 日
* 通訊作者, E-mail: [email protected] 接受日期:民國 105 年 05 月 18 日
福衛五號姿態與軌道系統硬體之極性驗證與測試
魏瑋廷
1*葉明宇
1詹英文
2摘要
衛星的姿態與軌道控制系統(AOCS)用於保持姿態軸的穩定、控制衛星本體的轉向以及軌道的調整,
是衛星中最複雜的系統,需要使用許多不同功能的感測器(Sensor)來判定姿態,透過複雜的演算法與大量 的計算,經由致動器(Actuator)輸出以控制姿態。
如前述,AOCS 是如此高度整合機械、電氣與控制的複雜系統,其中硬體極性錯誤常常是造成衛星 失去控制,甚至最終導致任務失敗的原因,所以在每一環節確保極性正確格外顯得重要。本篇文章主要 簡介福衛五號(FS-5) AOCS 硬體極性驗證測試,針對不同元件的特性進行適當的規劃與測試設計,並敘述 最終測試與分析結果。
關鍵字:極性、姿態控制、衛星整合測試
1. 簡介
福爾摩沙五號衛星(FORMOSAT-5, FS-5)為一 顆將運行在太陽同步軌道上的遙測衛星,而其姿 態與軌道控制次系統(AOCS)設計為一個相當精巧 與複雜的三軸穩定控制系統,主要目的為維持衛 星在軌道上以穩定的姿態運行以及精準控制衛星 本體的轉向以達任務操作需求。
為應付 FS-5 任務中各個階段不同的需求,
AOCS 配備了許多不同功能之感測器(Sensor)用以 判定姿態,其中包含量測地球磁場向量資料的磁 力計(Magnetometer, MAG)、提供太陽方向的全方 位太陽感測器(Omni-directional Sun Sensor, OSS)、
提供衛星姿態資料的追星儀(Star Tracker, STR)、
提供衛星位置、速度與時間等資料的全球定位接 收機(GPS Receiver, GPSR)以及提供衛星角速度的 陀螺儀(Gyro)。AOCS 也裝設不同功用之致動器 (Actuator),採用了以反應輪(Reaction Wheel, RW) 為主,再加上磁力棒(Magnetic Torquer, MTQ)為輔 的姿態控制致動器,而在軌道推進控制上則採用
四根推進器來提供轉換軌道所需的推力。
如前文所述,AOCS 於衛星系統中佔有非重 要的地位,若發生錯誤,往往對於衛星造成重大 的傷害,甚至會失去整顆衛星,故 AOCS 的硬體 系統驗證格外不可輕忽。一般 AOCS 硬體系統驗 證包含功能、性能以及極性等三種測試(Casasco et al., 2014)。在衛星整合測試階段,功能測試主要 目的為驗證硬體功能是否如預期,例如測試反應 輪運作是否能達到正常操作轉數、太陽感測器是 否能對光能量有反應……等等,為確認 AOCS 硬 體健康狀態最有效率的方式。性能測試則是進一 步測試並分析硬體系統的特性,例如反應輪轉數 與摩擦力的關係、太陽感測器對光能量反應的靈 敏度等等,目的為驗證 AOCS 硬體效能。而極性 測試主要目的為驗證硬體輸出的訊號與控制系統 所預期的指向(正負值、座標方位)是否一致,以 確保控制運算的正確性 (Stone, 1996)。
2. 極性驗證策略與分析
硬體極性是 AOCS 硬體系統驗證中最基本也 是最不可或缺的一環,因硬體極性錯誤常常被忽
略,而往往是造成衛星失去控制的主要原因,例 如 美 國 NASA 於 2001 年 發 射 的 TIMED (Thermosphere, Ionosphere, Mesosphere, Energetics and Dynamics)衛星,在發射後出現衛星角動量異 常持續增加之錯誤警告,經除錯後確認為控制器 中極性正負號錯誤造成,事後檢討是因在地面測 試時未做完整的極性驗證而導致此錯誤未被及早 發現(Dennehy et al., 2008)。
FS-5 AOCS 硬體極性驗證策略可劃分為三大 類型(如圖 1),第一種為硬體安裝檢視,在衛星整 合測試階段,飛行硬體安裝於衛星後,AOCS 工 程師依據硬體規格書以及衛星設計圖,審查並確 認硬體元件安裝的位置和軸向與設計相符。例如 RW 需特別注意原廠轉向標示以及轉子軸向是否 與設計相符(如圖 2);太陽感測器安裝方位是否與 設計一致(如圖 3);GPSR 天線方位確認(如圖 4) 的主要目的在於確認,在 GPS 天線安裝完成後,
其天線的指向相對於衛星本體座標是否指向到正 確方面,以致於隨著衛星姿態的變換還能接收得 到 GPS 信號等。此階段工作看似簡單,卻是極性 驗證工作中最基本也是最容易被忽略的部分,在 FS-5 硬體極性安裝審查即發現過 MTQ 正負軸安裝 相反之問題,此問題若無法及早發現修正,必定 造成後續衛星整合測試失敗,同時增加除錯之困 難度。
圖 1 FS-5 AOCS 硬體極性驗證策略架構
圖 2 FS-5 反應輪安裝檢視分析
圖 3 FS-5 太陽感測器安裝方位審查分析
圖 4 FS-5 導航接收機天線方位驗證分析
第二種為硬體元件的單元功能極性驗證。在 硬體安裝於衛星之前,於 NSPO 實驗室內執行硬 體單元的功能測試,直接量測硬體的訊號,確認 其極性表現與元件規格相符。除此之外,於飛行 硬體完成安裝於衛星後也必須執行硬體元件的功 能測試,透過衛星遙測資料(Telemetry data, TM)來 確認,此階段測試架構增加了飛行軟體(FSW)層,
可驗證經過 FSW 處理(如座標轉換)後之極性是否 符合預期。最後一種為硬體端對端(End to End)極 性功能驗證,由感測器端量測訊號,經過 FSW 後
產生控制指令由致動器輸出,驗證整體控制路徑 極性是否與設計一致。以下將介紹 FS-5 AOCS 幾 個具代表性硬體的單元與 End to End 功能極性驗 證測試。
3. 極性驗證測試設計與結 果
3.1 反應輪極性測試
反應輪為姿態控制最主要的驅動元件,NSPO 於福衛二號衛星整合測試階段時,曾經發現反應 輪極性安裝錯誤之問題(林辰宗,2010),幸而及 早發現而更改控制參數於以補救,避免發射後衛 星完全無法控制而導致衛星失效的致命災難。為 避免元件組裝後才發現極性問題時,僅能使用更改 控制方式去解決,FS-5 反應輪(RW)於元件單元測 試時,即設計一低摩擦力之旋轉平台(如圖 5),利 用轉動慣量守恆原理來驗證 RW 之極性。如表 1 所示,當控制 RW 控制(RW Cmds)轉子方向為順時 針(CW)時,轉動平台(Platform)則如預期產生反時 針(CCW)的轉動勢,反之亦然,測試結果符合預 期。
圖 5 反應輪極性驗證平台
表 1 反應輪極性測試結果 RW
Cmds
Platform Physical
Rotation Verify
CW CCW PASS
CCW CW PASS
3.2 磁力計極性測試
針對磁力計的極性測試,一般皆使用量測地 球磁場的方式來驗證(Anderson et al., 2007)。於 FS-5 磁力計元件單元功能測試時,我們使用一校 正過的精密磁力計,其軸向完全對準於 FS-5 磁力 計(MAG),經測試比對後確認兩者量測地球磁場 一致以驗證 MAG 本體極性正確。
圖 6 磁力計極性單元測試
因 FS-5 MAG 安裝於衛星側板上,其軸向並 未對準衛星本體座標,故需經由飛行軟體(FSW) 進行座標轉換為本體座標方位後方能予控制器使 用。而衛星整合測試階段的 MAG 極性驗證同樣也 是使用精密磁力計架設於 MAG 安裝位置的背板處,
其軸向也完全對準 FS-5 MAG,其量測值轉換為 衛星本體座標後與 FSW 的 MAG 讀值做比對,如 此可同時驗證 FSW 中轉換座標是否正確,如圖 7 所示,此測試結果驗證 FS-5 MAG 的極性與座標 轉換結果符合預期。
圖 7 磁力計極性測試於衛星整合階段
3.3 太陽感測器極性測試
FS-5 太 陽 感 測 器 (OSS) 由 六 組 太 陽 能 晶 片 (Solar Cell)所組成,其擺放方位如圖 8 所示,OSS1 至 OSS4 沿著衛星本體 X 軸傾斜 10 度,而 OSS5 與 OSS6 為正對 X 軸擺放設置。
FS-5 OSS 主要提供太陽方向予控制器計算出 衛星太陽能板方位與太陽方向之誤差角(αx、αy, 如圖 8 所示),而控制器會依此誤差角去做控制判
斷。在 FS-5 OSS 極性測試策略上,我們使用模擬 太陽光的鹵素燈,輪流從五個不同方向照射衛星本 體,模擬五個不同方位的太陽光源(如圖 9 所示),
之後檢驗 FSW 控制器所計算出的αx、αy方向角 是否如預期,如此可驗證從 OSS 感測器端量測至 終端 FSW 控制器路徑上之極性、座標轉換是否與 設計相符。如表 2 所示,FS-5 OSS 極性測試結果 皆符合預期。
圖 8 太陽誤差角分析
圖 9 模擬太陽光源之方向分析
表 2 太陽感測器極性測試結果
Case Spec Result Verify
C1+C6 X_AXIS_ANGLE -0.1745±0.1 rad -0.1785 rad PASS Y_AXIS_ANGLE 1.3989±0.1 rad 1.4324 rad PASS C2+C5 X_AXIS_ANGLE -0.1745±0.1 rad -0.1697 rad PASS Y_AXIS_ANGLE -0.7931±0.1 rad -0.812 rad PASS C3+C4 X_AXIS_ANGLE 2.1817±0.1 rad 2.09 rad PASS Y_AXIS_ANGLE 3.1416±0.1 rad 3.1372 rad PASS C1+C4+C5 X_AXIS_ANGLE 0.6115±0.1 rad 0.6023 rad PASS Y_AXIS_ANGLE -2.2529±0.1 rad -2.24 rad PASS C2+C3+C6 X_AXIS_ANGLE -2.5301±0.1 rad -2.39 rad PASS Y_AXIS_ANGLE 0.8887±0.1 rad 0.92 rad PASS
3.4 慣性參考單元測試
FS-5 的慣性參考單元(Inertial Reference Unit,
IRU),是由四顆陀螺儀(Gyro)所組成(如圖 10)。IRU 的極性測試要全面考量幾個因素:Gyro 元件本身 的校準量測結果、Gyro 安裝於衛星本體後的校準 量測結果,以及最後整合至飛行軟體中座標轉換的 計算。測試的方法,乃是將衛星架設於水平式旋轉 平台上(Horizontal Rotation Dolly),如圖 11 所示,
在衛星通電的情況下,分別對衛星本體的 X-Axis、
Y-Axis 以及 Z-Axis 三個軸向進行正反方向的旋轉,
透過 FSW 計算的結果來判斷,衛星本體量測到的 角速度是否符合預期的旋轉方向。
圖 10 FS-5 慣性參考單元(IRU)
圖 11 IRU 極性測試
圖 12 IRU-X 軸(先+X 再-X 軸轉動)極性測試 結果
1160 1180 1200 1220
-1.5 -1 -0.5 0 0.5 1 1.5
Gyro 1 Raw Data (deg/sec )
1160 1180 1200 1220
-1 -0.5 0 0.5 1
Gyro 2 Raw Data (deg/sec )
1160 1180 1200 1220
-1 -0.5 0 0.5 1
Gyro 3 Raw Data (deg/sec )
1160 1180 1200 1220
-1 -0.5 0 0.5 1
Gyro 4 Raw Data (deg/sec )
1150 1160 1170 1180 1190 1200 1210 1220
- 1.5 -1 - 0.5 0 0.5 1
1.5 Body Rates (deg/sec)
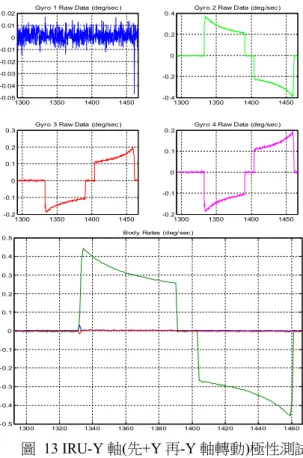
圖 13 IRU-Y 軸(先+Y 再-Y 軸轉動)極性測試 結果
圖 14 IRU-Z 軸(先-Z 再+Z 軸轉動)極性測試結果
圖 12 至 14 顯示分別對衛星本體的三個軸向各 別旋轉的測試結果,不論是在本體座標上的角速 度極性(Body Rates)、還是在四顆 Gyro各自讀值的 極性,皆符合預期,順利完成 NSPO 首次透過旋 轉平台來執行的 IRU 極性測試。
3.5 星像儀極性測試
星像儀(STR)的極性測試,也是要考量三個星 像儀鏡頭(Camera Head Unit, CHU)本身的校準量 測結果,鏡頭安裝後的衛星本體(如圖 15)的校準 量測結果,以及最後整合至飛行軟體中三個鏡頭 座標轉換的計算,其驗證方法主要是透過分析的 方式來達成。設計上會有三組理想鏡頭座標至衛 星本體座標的轉換關係如圖 16 所示,最後透過安 裝後的校準結果與設計來比較,特別是衛星的鏡 頭光軸(Z-Axis)上的誤差。
圖 15 星象儀鏡頭架設
圖 16 星象儀鏡頭擺放分析
1300 1350 1400 1450
-0.05 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02
Gyro 1 Raw Data (deg/sec )
1300 1350 1400 1450
-0.4 -0.2 0 0.2 0.4
Gyro 2 Raw Data (deg/sec)
1300 1350 1400 1450
-0.2 -0.1 0 0.1 0.2 0.3
Gyro 3 Raw Data (deg/sec )
1300 1350 1400 1450
-0.2 -0.1 0 0.1 0.2
Gyro 4 Raw Data (deg/sec)
1300 1320 1340 1360 1380 1400 1420 1440 1460
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4
0.5 Body Rates (deg/sec )
1800 1850 1900
-0.06 -0.04 -0.02 0 0.02 0.04
Gyro 1 Raw Data (deg/sec)
1800 1850 1900
-0.02 0 0.02 0.04 0.06 0.08
Gyro 2 Raw Data (deg/sec)
1800 1850 1900
-0.4 -0.2 0 0.2 0.4
Gyro 3 Raw Data (deg/sec)
1800 1850 1900
-0.4 -0.2 0 0.2 0.4
Gyro 4 Raw Data (deg/sec)
1760 1780 1800 1820 1840 1860 1880 1900
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
Body Rates (deg/sec)
表 3 結果顯示經過誤差分析後的在每個鏡頭光 軸上的誤差結果皆小於 0.5 度的規格,順利完成驗 正。
表 3 星象儀極性驗證分析結果 Error
(deg) CHU 1 CHU 2 CHU 3 Verify Z 軸 0.321 0.287 0.406 PASS
3.6 端至端測試
相對於元件單元測試,端至端(End-to-End)測 試為一種最能對整體控制迴路進行完整的驗證方 式。標準的控制迴路端至端極性驗證架構如圖 17 上方所示,訊號由感測器(Sensor)量測,經過 FSW 座標轉換後透過控制器(Control Algorithm)產生相 對應的控制指令,再由致動器(Actuator)輸出,如 此能完整地驗證整條控制迴路。我們依據 FS-5 的 衛星本體元件方位以及測試環境架構進行等效的 轉換設計,如圖 17 下方所示,從控制端手動下指 令使致動器 MTQ 產生磁場,經 MAG 量測後由 FSW 之讀值驗證極性是否正確。
圖 17 傳統端至端測試(上)與 FS-5 MAG-MTQ 端 至端極性測試架構(下)比較圖
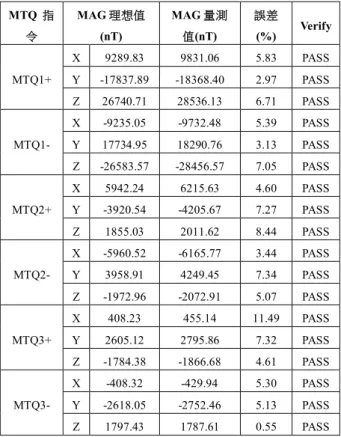
本測試的關鍵在如何確認 MAG 感測 MTQ 所 產生磁場的合理值範圍,如圖 18 所例,確認 MTQ 與 MAG 之相對位置後,可依據磁力棒產生偶極矩 公式(Lee, et al., 2002)求得 MAG 理想的量測值,
但在初次進行測試後,發現 MAG 感測 MTQ 所產 生的磁場,受到路徑上其他磁性元件以及環境干 擾的影響比想像中還大。最終將環境磁場量測結 果納入測試期望值後,如表 4 所示,MAG 量測值 已經相當接近預期,誤差皆小於規範值(15%)。
圖 18 FS-5 MAG-MTQ 相對位置與 MAG 量測理論 值分析
表 4 MAG-MTQ 端至端極性測試結果
MTQ 指 令
MAG 理想值 (nT)
MAG 量測 值(nT)
誤差
(%) Verify
MTQ1+
X 9289.83 9831.06 5.83 PASS
Y -17837.89 -18368.40 2.97 PASS
Z 26740.71 28536.13 6.71 PASS
MTQ1-
X -9235.05 -9732.48 5.39 PASS Y 17734.95 18290.76 3.13 PASS Z -26583.57 -28456.57 7.05 PASS
MTQ2+
X 5942.24 6215.63 4.60 PASS
Y -3920.54 -4205.67 7.27 PASS
Z 1855.03 2011.62 8.44 PASS
MTQ2-
X -5960.52 -6165.77 3.44 PASS
Y 3958.91 4249.45 7.34 PASS
Z -1972.96 -2072.91 5.07 PASS
MTQ3+
X 408.23 455.14 11.49 PASS
Y 2605.12 2795.86 7.32 PASS
Z -1784.38 -1866.68 4.61 PASS
MTQ3-
X -408.32 -429.94 5.30 PASS
Y -2618.05 -2752.46 5.13 PASS
Z 1797.43 1787.61 0.55 PASS
4. 結語
本文介紹 FS-5 姿態控制系統硬體極性驗證的 策略規劃與測試設計,包含最基本的元件極性安裝 審查,並以 OSS、STR 與 GPSR 等元件安裝配置 檢驗分析舉例。在分為衛星組裝前與後兩階段的硬 體單元功能極性測試部分,搭配 MAG、RW、
IRU……等數個 AOCS 重要的硬體元件的極性功 能測試來舉例。最終以 MAG-MTQ 的 End-to-End 極性驗證測試,來說明從感測器經過控制器到致動 器整條完整路徑之極性驗證。
此為 NSPO 有史以來首次針對 AOCS 硬體系 統進行通盤完整的極性驗證,從無到有,克服測試 環境以及技術等種種困難,研發出一套為 FS-5 量 身訂做之測試驗證技術與系統。目前已完成所有 FS-5 AOCS 硬體極性測試與分析報告,確認 AOCS 硬體安裝以及 FSW 中之轉換矩陣與之正確性,並 利用測試以及分析驗證整條迴路之控制極性與設 計相符。本項測試可以說是 AOCS 設計驗證的最 後一道關卡,有了這項成功的測試結果,更加穩固 了 AOCS 設計的可靠性與正確性,再加上軟體模 擬與硬體迴路測試,我們可以很有信心將 FS-5 衛 星送上火箭發射。相信未來在初期軌道的飛行姿態,
必能如預期般的順利運行,並展現 NSPO 姿態控制 自主發展的技術能量。
參考文獻
林辰宗,2010。福衛二號衛星延壽與操控技術之提 昇,2010 年國研院傑出科技貢獻報告。[Lin, C.T., 2010. The life-span method and flight operation improvement for FORMOSAT-2 satellite, 2010 Outstanding Research Award, National Applied Research Laboratories (NARL). (in Chinese)]
Anderson, B.J., Acuña, M.H., Lohr, D.A., Scheifele, J., Raval, A., Korth, H., and Slavin, J.A., 2007.
The magnetometer instrument on MESSENGER, Space Science Reviews, 131: 417-450, doi:10.1007/s11214-007-9246-7.
Casasco, M., Girouart, B., and Benoit, A., 2014. GNC and AOCS functional chains engineering and verification, 8th ESA Workshop on Avionics, Data, Control and Software Systems - ADCSS 2014.
Denneh, N., Lebsock, K., and West, J., 2008.
Guidance, navigation and control (GN&C) best practices for human-rated spacecraft systems, NASA Program Management Challenge 2008 Lee, J., Ng, A., Jobanputra, R., 2002. On determining
dipole moments of a magnetic torquer rod- experiments and discussions, Journal of Canadian Aeronautics and Space, 48(1): 61-67.
Stone, L., 1996. ADCS Polarity Testing, TRW internal document, ROCSAT-1-96-321-039.
1 Associate Researcher, Flight Control Division, National Space Organization, Received Date: Dec. 15, 2015 National Applied Research Laboratories. Revised Date: May. 03, 2016
2 Research Fellow, Flight Control Division, National Space Organization, Accepted Date: May. 18, 2016 National Applied Research Laboratories.
* Corresponding Author, E-mail: [email protected]
Polarity Validation and Testing of the FORMOSAT-5 Attitude and Orbit Control System Hardware
Wei-Ting Wei 1* Ming-Yu Yeh 1 Ying-Wen Jan 2
Abstract
Attitude and Orbit Control Subsystem (AOCS) is the very vital one and usually one of the most complicated subsystems. It is in charge of maintaining the satellite on its orbit and controlling the pointing in the required range to achieve the expected performances. It is also designed to be a highly sophisticated system that not only contains various pieces of actuator and sensor hardware but also equips many exquisite software algorithms for control, guidance, and navigation purposes etc. in order to support different mission requirements.
The Polarity validation plays an extremely important role in the verification of AOCS because any failure due to the polarity problem of AOCS hardware may make the satellite cannot fulfill its mission or lead to the worst—complete loss of the satellite. Therefore, in this paper, we introduce test strategies and demonstrate the test results for the FORMOSAT-5 (FS-5) AOCS Polarity Tests.
Keywords: Polarity, AOCS, AIT