行政院國家科學委員會專題研究計畫 成果報告
下肢肢體障礙人士及老人之室內載具整合輔助系統(2/2) 研究成果報告(完整版)
計 畫 類 別 : 整合型
計 畫 編 號 : NSC 99-2218-E-011-002-
執 行 期 間 : 99 年 11 月 01 日至 100 年 10 月 31 日 執 行 單 位 : 國立臺灣科技大學電機工程系
計 畫 主 持 人 : 郭重顯
共 同 主 持 人 : 蕭坤安、葉正桃、李維楨、陳建中、蘇順豐 項天瑞、鍾聖倫、林其禹、林紀穎、林燕慧 劉文瑜
計畫參與人員: 學士級-專任助理人員:凃雅文
碩士班研究生-兼任助理人員:莊瑋靖 碩士班研究生-兼任助理人員:藍偉綸 碩士班研究生-兼任助理人員:林敬舜 碩士班研究生-兼任助理人員:朱韻璇 碩士班研究生-兼任助理人員:郭曉峰 碩士班研究生-兼任助理人員:王佩如 碩士班研究生-兼任助理人員:黃敬航 碩士班研究生-兼任助理人員:蔡淙偉 碩士班研究生-兼任助理人員:王彥程 碩士班研究生-兼任助理人員:施怡瑛 碩士班研究生-兼任助理人員:曾曉平 碩士班研究生-兼任助理人員:潘佳佑 碩士班研究生-兼任助理人員:李承翰 碩士班研究生-兼任助理人員:林志隆 碩士班研究生-兼任助理人員:王薇穎 碩士班研究生-兼任助理人員:林貴彥 碩士班研究生-兼任助理人員:鄭文博 碩士班研究生-兼任助理人員:阮雄維 碩士班研究生-兼任助理人員:黃一桓 碩士班研究生-兼任助理人員:許朝昕
碩士班研究生-兼任助理人員:林新益 碩士班研究生-兼任助理人員:蔡生盡 碩士班研究生-兼任助理人員:俞玉智 大專生-兼任助理人員:關韻茹
大專生-兼任助理人員:黃馨緯 大專生-兼任助理人員:許家瑋
博士班研究生-兼任助理人員:陳廷碩 博士班研究生-兼任助理人員:陳俊孜 博士班研究生-兼任助理人員:賈博鈞 博士班研究生-兼任助理人員:劉岳翔 博士班研究生-兼任助理人員:游涵諺 博士班研究生-兼任助理人員:傅宇 博士班研究生-兼任助理人員:黃俊家 博士班研究生-兼任助理人員:黎德興 博士班研究生-兼任助理人員:伍巧馨 博士班研究生-兼任助理人員:黃維彬
報 告 附 件 : 國外研究心得報告
出席國際會議研究心得報告及發表論文
公 開 資 訊 : 本計畫涉及專利或其他智慧財產權,2 年後可公開查詢
中 華 民 國 101 年 01 月 20 日
中 文 摘 要 : 輪椅是下肢肢體障礙人士及老人在日常生活中最重要的行動 載具;目前市面上之輪椅(不包含戶外代步車)可分為手 動、電動與動力輔助等不同產品別。就外型而言,目前市面 上所販售輪椅外型所呈現出來的印象大同小異,但不變的是 傳達著『殘疾人士』使用輔具。基於『冰冷的外型』、『需 要被照護的表徵』、『無法融入居家環境(如裝潢、家具等 等)之突兀感』、『不舒適乘坐空間』等因素,使得許多銀 髮族排斥使用輪椅,此也導致當老人跌倒時因骨質條件不良 而造成嚴重之肢體殘障問題。因此,在設計輪椅時,除了考 量行動輔助功能之外,也同時考量使用者之『尊嚴』、『舒 適』、『安全』以及『環境融入性』,來提高使用者使用之 意願。除了上述考量外,本計畫也針對下肢肢體障礙人士及 老人之需求設計『創新式操控介面』來達到更『直覺』與
『容易』之操作方式;也同時考慮到『坐姿變換』以及『移 位輔助』功能,提供更長時間之乘坐舒適性、取物、如廁以 及上下床;提高使用者獨立生活之能力;同時設計全方位移 動機制,來提高載具於狹小空間移動性、穩定性以及移位輔 助時之載具接合性(提供平移自由度)。在另一方面,由於 使用者對於室內載具之高依賴性,因此本計畫也針對個人化 服務加以設計,透過 RF ID 模組,載具可針對不同使用者調 整控制參數;並可自動提供使用者周邊之家電、電燈、自動 門等電子設備資訊狀態,透過觸控面板輕易獲得上述資訊與 並加以控制,提高生活便利性;亦可透過前方隱藏式攝影機 來辨識前方人員、物體或標示,加以鎖定及影像放大來解決 老人視力衰退之問題。在使用者安全防護上,本載具透過
『創新式操控介面』上之電極來持續監控使用者心率(心電 圖),並使用載具上之微型攝影機來辨識使用者行為,達到 危險行為或昏眩之預警機制。同時,透過周邊障礙物偵測進 行『智慧型主動避障輔助』以及操作把手之力回饋提醒使用 者,增加操作安全性。此外,為了使此一室內載具可使用於 醫療照護機構,室內定位系統亦加以建構,透過路徑導引,
提供記憶力衰退之老人於照護機構中得以順利到達目的地,
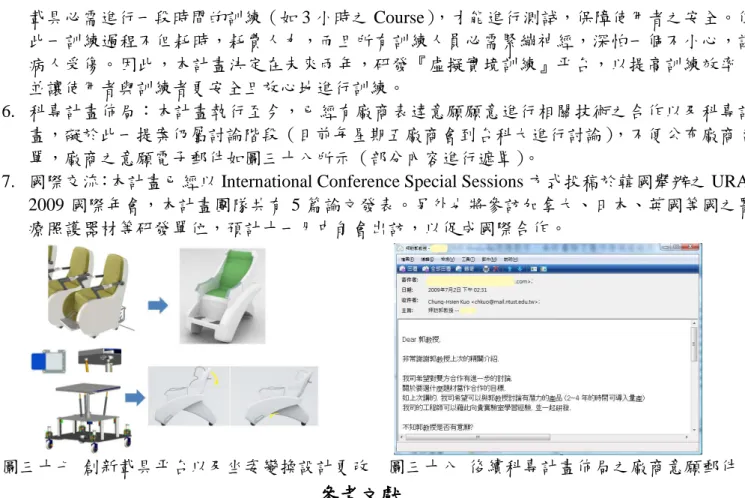
並可在使用者發生危險時回報載具所在位置。特別的是,一 般輪椅均設計為充電式;但考量載具輪椅使用率,本計畫也 研發自動換電池模組及電池交換站,透過影像伺服機械臂及 定位導航模組讓下肢障礙人士及老人得以輕鬆且快速地回復 電力供應。最後,本計畫也與醫院合作,進行相關臨床測試 與驗證,以期待本計畫之研究成果能落實到未來照護產業,
並造福更多下肢肢體障礙人士及老人。
中文關鍵詞: 創新式操控介面、坐姿變換、移位輔助、自動電池交換、定
位導航
英 文 摘 要 : This project develops an innovative manipulation interfaces for the users. Adjustable seat posture and user body transfer mechanism modules are developed to performs long time seating for preventing the
pressure sore as well as to change seat height, assist for toilet, and assist for bed transfer.
Meanwhile, the omni-moving platform is designed to move at narrow spaces as well as to provide more mobility when assisting for transfer. The mobile chair is capable of adjusting the control parameters for different users via RF ID techniques. More
conveniently, the statuses of appliances, lamps, automatic doors can be accessed and they can be further controlled through the touch panel on the mobile chair. In addition, a digital zoom based small size camera is used to recognize and enlarge the focused people, objects, and marks in front of the mobile chair to resolve the poor eyesight problems of elders. For the safety protection of users, the
mobile chair introduces electrode pairs on the innovative manipulation interfaces to continuously monitor the hart rates of mobile chair users in term of the electrocardiogram (ECG). Besides, another small camera is used to recognize the motion
behaviors of in danger or stupor for urgent warnings.
To improve the driving safety, obstacles surrounding the mobile chairs are detected for the active
collision prevention using perception based obstacle avoidance algorithm as well as for the force feedback on the innovative manipulation interfaces to notify the users. To apply the proposed mobile chair to caring organizations, indoor positioning system is constructed as path guidance systems for elders with memory problems. Besides, the call center in caring organizations may immediately locate correct position when the user is in danger. Especially, most of
wheelchairs use battery charge to restore the power.
In this work, a battery exchange module and station is developed based on the robotic arm and image servo tracking techniques. The battery exchanger performs
an easy and fast power recovery solution as well as improves the utilization of the mobile chair.
Finally, the outcomes of this project are planned to be clinically tested and evaluated in cooperated hospitals to verify their feasibility. Also, these outcomes can be physically applied to future caring industries and help lower extremity disabled people and elders.
英文關鍵詞: innovative manipulation interfaces, adjustable seat postures, user body transfer mechanism modules, automatic battery exchange system, localizations and navigations
行政院國家科學委員會補助專題研究計畫■ 成 果 報 告
□期中進度報告 下肢肢體障礙人士及老人之室內載具整合輔助系統
計畫類別:□ 個別型計畫 ■ 整合型計畫 計畫編號:NSC 99-2218-E-011-002-
執行期間:99 年 11 月 01 日至 100 年 10 月 31 日
計畫主持人:郭重顯
共同主持人:葉正桃、李維楨、陳建中、蘇順豐、項天瑞、鍾聖倫、
林其禹、林紀穎、蕭坤安、林燕慧、劉文瑜 計畫參與人員: 凃雅文、陳廷碩、賈博鈞等專/兼任助理
成果報告類型(依經費核定清單規定繳交):□精簡報告 ■完整報告
本成果報告包括以下應繳交之附件:
■赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
■出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
■涉及專利或其他智慧財產權,□一年■二年後可公開查詢
執行單位:國立臺灣科技大學 電機工程系
中 華 民 國 101 年 01 月 16 日
目錄
Ι. 第一年度-下肢肢體障礙人士及老人之室內載具整合輔助系統(I)………01
摘要………02
Abstract………02
前言………02
研究目的………03
文獻探討………04
研究方法………05
結果與討論………12
計畫成果自評………20
參考文獻………21
Π. 第二年度-下肢肢體障礙人士及老人之室內載具整合輔助系統(1/2)………22
摘要………23
Abstract………23
前言………24
研究目的………24
文獻探討………25
研究方法………26
結果與討論………29
計畫成果自評………32
參考文獻………33
III. 第三年度-下肢肢體障礙人士及老人之室內載具整合輔助系統(2/2)………35
摘要………36
Abstract………36
前言………37
研究目的………37
文獻探討………38
研究方法………40
結果與討論………50
計畫成果自評………53
參考文獻………57
IV. 可供推廣之研發成果資料表………59 V. 國際參訪報告(如附件)
VI. 國際會議報告(如附件)
行政院國家科學委員會補助專題研究計畫 行政院國家科學委員會補助專題研究計畫 行政院國家科學委員會補助專題研究計畫
行政院國家科學委員會補助專題研究計畫 □□□□ 成 果 報 告成 果 報 告成 果 報 告 成 果 報 告
■
■
■
■期中進度報告期中進度報告期中進度報告期中進度報告
下肢肢體障礙人士及老人之室內載具整合輔助系統(I)
計畫類別:□ 個別型計畫 ■ 整合型計畫 計畫編號:NSC 97-3114-E-011 -002 -
執行期間: 97 年 12 月 01 日至 98 年 11 月 30 日
計畫主持人:郭重顯
共同主持人:李維楨、林其禹、林紀穎、鍾聖倫、陳建中、蘇順豐、項天瑞 蕭坤安、連恒裕、林燕慧
計畫參與人員: 邱國維、凃雅文、蕭嘉文等專/兼任助理
成果報告類型(依經費核定清單規定繳交):□精簡報告 ■完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份(預計預計預計 10 月底出國預計 月底出國月底出國) 月底出國
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、列管計畫 及下列情形者外,得立即公開查詢
■涉及專利或其他智慧財產權,□一年■二年後可公開查詢
執行單位:國立臺灣科技大學 電機工程系
中 華 民 國 99 年 01 月 21 日
C012-1封面
表 C012-1 共 20 頁 第 1 頁
摘要 摘要摘要 摘要
本計畫之目的為針對『下肢肢體障礙人士』及『老人』等使用者族群提出一整合『智慧空間』與
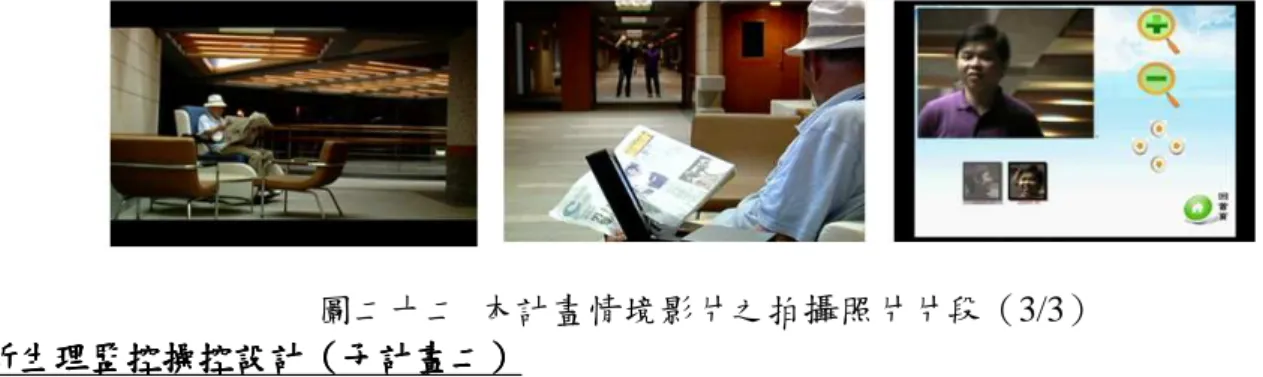
『智慧型室內載具』之整體解決方案。本計畫之最大特色在於以『創新』思考模式,針對『使用者需 求』來進行『高程度智慧化』與『實務應用導向』之系統及產品設計,使此一計畫之成果不但具有『產 業創新性』,也能『契合使用者需求』。本計畫之創新部分主要為『創新前瞻人因設計』、『創新輕量節 能室內載具移動平台設計』、『創新生理回饋操控介面設計』;另外,在『智慧化』主要是結合『人機 互動』與『智慧空間』來研發『即時心率感測』、『智慧型反應導航』、『環境資訊取得與控制』與『自 動電池交換器』。在產品驗證上,除了工程規範驗證外,本計畫也特別重視使用者之回饋,透過本計 畫所設計之『情境動畫與影片』與『臨床量表』,針對使用者與醫療從業人員進行問卷,問卷分析結 果將作為本計畫研發方針之擬定。因此,本計畫所研發之室內載具不但具有創新與前瞻之外型設計,
其簡易的人因操作介面也大幅降低老人操控上的困難度,最重要的是所有的功能都基於使用者的需求 加以設計與研發;以達到除了『行動與行為之無障礙』外,更能達成『心理無障礙』,帶給下肢肢體 障礙人士及老人更自主、獨立、自信與尊嚴的生活。最後本計畫今年度所達成工作包括:情境設計、
情境影片拍攝與製作(真人與實景)、載具人因設計、室內移動平台設計、生理回饋操控介面設計、
環境資訊取得與控制、室內載具定位、自動電池交換器設計以及載具臨床量表設計等等。
關鍵字關鍵字
關鍵字關鍵字::::室內行動載具、病患移位載具、個別化載具服務、室內定位與導航、自動電池交換
Abstract
This project is proposed based on the mobility and transfer requirements of elders and lower extremity disabled people to improve their daily of life. The proposed approaches represent a total solution that integrates the techniques of intelligent spaces and intelligent indoor vehicles. The most important feature of this project is the innovative design concept. Especially, the proposed solution is developed based on the user requirements to realize high-level intelligence systems and practical application oriented designs. Therefore, the outcomes of this project do not meet the user needs but also perform industry innovations. The innovations of this project consist of innovative and advanced human factor design, innovative light weight indoor vehicle movement platform, and innovative biopotential feedback based vehicle manipulation interface. At the same time, the intelligence is implemented via integrating the human machine interactions as well as the intelligent spaces to carry out the functions of real-time electrocardiography (ECG) monitoring without fixing ECG holders, intelligent vehicle navigations, environment information accessing and device control, and automatic battery exchange. In addition to the engineering and clinical verifications, this project also collect and analyze the user feedbacks via clinical questioners. The questioners are performed based on the developed scenario videos (in real-environment) and clinical evaluation form for users and caregivers.
Analyses of questioners are further used to guide the development team to improve the practical feasibility.
The proposed solution represents an innovative and advanced indoor vehicle concept. At the same time, the simple and straightforward operation interface also reduces the efforts of using this vehicle. More importantly, all functions are developed according to the user requirements. Consequently, the proposed vehicle achieves the barrier frees of mobility and mentality as well. Finally, the annual achievements of this project consist of scenario design, scenario movie production with real environments and users, vehicle human factor design, indoor vehicle movement platform, innovative vehicle manipulation interface with real time ECG feedback, environment information accessing and device control in intelligent spaces, indoor vehicle positioning and navigations, automatic battery exchange, and clinical function evaluations.
Keywords: indoor mobile chair; patient transfer facility; personalized service for mobile chair; indoor positioning and navigation; automatic battery exchange system.
一 一一
一、、、 、 前言前言 前言前言
根據內政部統計通報 96 年底列冊身心障礙者人數統計達 102 萬人,較 95 年底增加近 4 萬人(亦 即增加 4.1%),其中以肢體障礙者比例最高(39.5%)。此外,相較於 95 年底之身心障礙者年齡分佈,
65 歲以上族群比率增加最多(0.52%);在 65 歲以上之身心障礙者中又以肢體障礙者占 41.88%為最
多。同時,根據內政部截至九十六年之老年人口之統計資料,老年人口占總人口數的 10%,且老化指 數已達 56%以上,以每年至少 3%的速度增加,而且老年人口依賴比為 14%;此一統計數據顯示我國 老年照護問題的需求日益增加。一般來說,高齡人口普遍都有較高的失能率:65 歲以上失能比例為
表 C012-1 共 20 頁 第 2 頁 9.12%;65 歲以下失能比例為為 0.57%;也就是說失能率在高齡人口為非高齡人口的 16 倍。
在另一方面,依據民國 89 年行政院主計處辦理「戶口及住宅普查」報告顯示,台閩地區約有 33 萬 8 千餘人需要長期照顧,其中 53.9%屬 65 歲以上老人,約 18 萬 2,351 人,占全體老年人口 9.7%。
據推估,2007 年長期照顧服務需求人數有 24 萬 5,551 人(其中提早老化之人口數占老人人口數之 5
%),2010 年預計增為 27 萬餘人,2015 年為 32 萬 7 千餘人,2020 年為近 40 萬人。因此,改善下肢 肢體障礙人士及老人之行動輔助及生活品質將是未來十年內相當重要的課題。同時,在改善下肢肢體 障礙人士及老人之行動輔助及生活品質議題上,可以藉由新科技(如機器人與自動化)之導入,並配 合環境條件與生活型態演進,使下肢肢體障礙人士及老人有能力可以在較長時間來獨立生活,減緩照 護人力需求之壓力,並緩和人口高齡化對長期照護之衝擊。
下肢肢體障礙人士及老人對於室內載具而言,有著不可或缺之依賴性。但針對上述使用者來說,
輪椅似乎是目前唯一的選擇。然而,輪椅ㄧ直發展至今,其所帶給社會大眾的印象一直沒有改變過;
也就是說輪椅像是以『機械支架結構』以及『突兀之輪子』所構成的,同時也發現號稱愈豪華之輪椅,
其外型就顯得更複雜與不協調。我們無法否定這些輪椅在不同使用需求下對病患所提供的協助以及便 利性,但是當使用者必須在家中使用此類輪椅一整天,難道沒有更舒適與協調之解決方案嗎?此一念 頭也是本計畫最重要的動機。
二 二二
二、、、 、 研究目的研究目的 研究目的研究目的
本計畫將以『人人人人』為計畫研發之主要訴求,強調所開發室內移動載具之各項先進及創新技術能實 際落實到真正的使用族群;即『下肢肢體障礙人士及老人』。本計畫之研發主軸著重於『人機互動』
與『智慧型環境整合』,提升『外觀與環境融入性』、『乘坐舒適性』、『使用便利性』、『操作安全性與 穩定性』、『資訊取得性』、『感官強化性』、『長時間使用性』、『獨立使用性』、『臨床可行性』,以可增 加使用者自行操作之機會,降低對幫傭與家人依賴;相信必定可帶給下肢肢體障礙人士及老人更自主自主自主、自主 獨立
獨立 獨立
獨立、自信自信自信自信與尊嚴尊嚴尊嚴尊嚴的生活。因此,本計畫的目標在於針對下肢肢體障礙人士及老人等使用者族群,提 一出整合智慧空間與智慧型室內載具之整體解決方案;其最大的特色在於以創新的思考模式,來針對 使用者需求進行高程度智慧化與實務應用導向之系統及產品設計。所以,此一計畫的成果不但具有產 業創新性,也能契合到使用者的需求。
在計畫執行的主軸上,本計畫之優先考量順序依序為:『使用者樂於使用』、『生活品質提升』、『前 瞻、節能與智慧化』。由於,本計畫所開發之室內載具主要應用於『居家環境』以及『安養機構』,所 以本計畫第一個考量重點在於『使用者必須樂於使用』;在此一考量下,使用之安全性、人因設計、
產品功能以及產品外型等項目都在評估的範圍內。其次考量是『生活品質提升』,由於此一室內載具 不僅具有行動力的延伸,而且本計畫結合了『智慧空間』之『資訊系統與無線感測網路系統』以及『人 機互動平台介面』,透過這些介面設計,使用者便可以輕易地在載具上控制居家環境的電器用品、開 關門等等作業,以提升使用者之生活便利性。最後,計畫團隊所研發之成果也將能達成『智慧型輕量 載具計畫』之前瞻設計、節能以及智慧化等三大重要目標。
為了使本計畫之執行能夠契合到前述之主軸與目標,本計畫採用三層式計畫情境應用設計架構,
包括『核心層』、『延伸層』與『週邊層』,其乃以使用者之生活中心之設計方法,如圖一所示。在此 一架構中,核心層的部份研發重點為『行動與輔助』,這個部份由子計畫二負責,其負責的工作包含:
移動平台的設計、操控方法與使用者移載設計(包含了上下床以及坐姿變換等等);此一層次之目的 在於提升使用者獨立使用之能力,同時也能提升使用者之尊嚴。此外,此一層次也同時研發一創新與 前瞻之平台外型與人因操控設計,來達成滿足『使用者』以及『市場』之需求。
其次為『延伸層』,此一層架構是由子計畫三所負責,其執行內容包含:節能與安全。由於本計 畫導入了智慧空間的概念,使得本計畫所設計之載具具有無線通訊之能力,並以無線感測與控制之模 式來與居家的自動化設施互動(資訊取得與裝置控制)。如此一來,使用者便可以直接透過載具人機 互動介面直接遙控開關電燈與窗戶等等,來達到減少不必要的載具移動,並增加使用者之便利性。由 於減少載具的移動,因此馬達耗電減少,進而達成節能之目的;此外,由於減少了不必要的移動,因 此也大幅降低碰撞以及危險之情況,提高使用上的安全性。在另一方面,透過動態障礙物偵測與智慧 型導航系統,本載具之行動安全性也同時增加了。
本架構之最外層為『週邊層』,此一層架構之研發主軸為『監控』與『電力』兩大部分,其分別
表 C012-1 共 20 頁 第 3 頁 由子計畫四及子計畫五所執行。在『監控』這一部份使用了『定位』與『智慧型導航』之機制,針對 失意或者記憶退化老人,搭配使用者互動介面達到即時路徑導引之目的。另外,當老人或使用者產生 危險或者是昏迷的時候,監控系統也能快速的進行使用者之所在位置定位,並在第一時間派遣醫護或 保全人員到達事件地點,進行急難救助。
行動 行動 行動 行動////
輔助 輔助 輔助 輔助
(
((
(子二子二子二子二))))
(((
(子三子三子三子三)))) 節能與安全 節能與安全 節能與安全 節能與安全
監控監控監控 監控((((子四子四子四子四)))) 電力
電力 電力 電力(((子五(子五子五子五))))
人因設計 人因設計 人因設計 人因設計
((
((子一子一子一)子一)))
臨床評估 臨床評估 臨床評估 臨床評估
((
((子六子六子六子六))))
圖一 三層式計畫情境應用設計架構
在另一方面,對於移動載具而言,電力的持續是相當重要的。傳統的輪椅使用電池充電的方式來 達成電力的延續;然而,輪椅電池充電必須耗費相當的時間,這段時間電動輪椅也不能使用,使得輪 椅的電力持續性出現問題。因此,本計畫採用類似手機充電的方式,當電池沒電的時候則以電池更換 來達成。由於老人或下肢肢體障礙人士在更換載具下方之電池時並不方便(彎腰動作的困難度,以及 電池重量之體力負荷),所以本計畫特地開發了視覺導引之機器手臂,透過本計畫所建構之充電站內 的視覺導引機器手臂,辨識載具上電池的位置並自動加以更換,提高使用者之便利性。最後,子計畫 一與子計畫六之人因設計與臨床評估則橫跨核心層、延伸層及週邊層,以使本計畫工程團隊所研發之 系統能契合使用者需求,並達成臨床成效。
如前所述,本計畫之執行方針為『創新前瞻』、『節能』以及『智慧化』。在『創新前瞻』部份,本 計畫開發『創新前瞻人因設計室內載具平台』、『創新輕量節能室內載具移動平台設計』以及『創新生 理回饋操控介面設計』。在『節能』部份,本計畫針對室內載具平台驅動需求重新定義,定義出『小 型化』移動裝置之控制與驅動裝置。另外,透過環境資訊取得以及裝置控制來減少不必要之載具移動 並增加使用者之便利性與安全性。最後,在智慧化方面,本計畫結合了智慧空間,並整合智慧型感測 器與控制機制來達成本系統之智慧性。
三三三
三、、、 、 文獻探討文獻探討 文獻探討文獻探討
使用輔具除了能夠有效補償下肢肢障人士及高齡者在行動受限或身體機能老化外,也可保持獨立 自主的生活功能,進而能重建使用族群的自我控制感。對於老化與認知的一些研究結果顯示:高齡者 雖然生理上的認知能力開始退化,但是為了彌補生理上的不足,透過對於具有情感經驗對象上的情緒 選擇,高齡者可以更具效率的達到認知的目標 [1]。因此對於或高齡者或下肢肢障人士而言,一件具 有親切或引起正向情緒之產品意象成為必須重視之議題。高齡者對於事物的接受度與判斷時間較年輕 人緩慢,且訊息處理的過程(反應時間)隨著年紀的提升而有增加的趨勢。某些研究也發現:在記憶 上的喚起機制,具情感性的刺激物優於中立情感性的刺激物,而高齡者可能因為對於情感性刺激感知 的降低,因而造成高齡者在整體記憶上衰微的因素之ㄧ [2]。Norman 首先提出以使用者為中心的設計 (User-Centered Design, UCD)的概念,他的論點是:好的設計應該貼切地考量使用者的經驗,而不是僅 考量其機能上的效能 [3]。如此便可以拉近產品與使用者之間的溝通鴻溝,讓產品具有智慧卻有親人 性的特質。
透過使用情境模擬,我們可以設身處地以使用者的角度,模擬相關的人、時、地、物及使用過程,
以投射反應真實狀態的條件並加以思考及串連,可達到貼近使用者想法或可能遭遇之各種問題。在許 多發展消費性產品的設計小組工作中,情境的建立被證明對於傳統人因工程的方法是具有效的價值賦 予。此外,情境設計是一種有效的探究方法及原型製作、溝通工具,特別是在產品設計過程的初期[4]。
由相關文獻探討可以發現,現有輔具大部分是針對功能導向為主,較少針對室內及與居家環境進行設 計,因此這些產品放置在家中時,便與家中環境與傢俱格格不入,其功能上亦異於一般戶外形式設計
表 C012-1 共 20 頁 第 4 頁 之需求,這是設計研發上的機會缺口。
輪椅在近年來的發展,大多著重於智慧化以及移動平台之開發。MIT 提出一新型輪椅[5]其搭載 GPS 全球衛星電位系統與 Wi-Fi 無線網路進行自主定位導航。此外,該研究亦可透過語音辨識技術來 控制輪椅行動。Bourhis 等學者開發了 VAHM 導航輪椅 [6],其軟體控制架構分類為局部與全域控制 模式感測模組負責環境偵測、沿牆偵測與局部偵測。同時,導航控制器負責環境搜尋、方向跟隨、沿 牆、路徑規劃、避障等等;最後,通訊控制器負責人機介面與指令下達等。Lankenau 等學者開發了兼 具輔助駕駛與導航系統之 Rolland 輪椅[7]。Rolland 具有平穩速度控制、空地轉彎、路口轉彎、避障、
通過狹窄出入口;因此對於肢體殘障人士之移動機動性有很大的幫助。
在坐姿變換與調整之研究成果上,美國 iBot4000 輪椅 [8] 是一相當傑出的產品。其具備先進之感 測與平衡控制技術,因此能協助肢體障礙人士上下樓梯,並能提高輪椅高度,以協助拿取高處物品或 與人平視對話。但其價格過於昂貴,無法造福多數肢障人士。另外,在障礙物警示部份,日本豐田汽 車所發表之電動概念車 i-Real 則是具有流線外型與時尚感,其以椅座把手旁之手控搖桿控制車體移動,
並能在接近障礙物時,以震動和音響提醒駕駛員,以避免發生碰撞。
對老人而言,視覺退化是重要的問題。先進的視訊技術(如視訊追蹤)將可輔助老人在視覺上的 能力。在視訊追蹤的發展上,全景影像的廣闊視野常被拿來做為機器視覺對環境的感測器,即結合全 景相機及 PTZ 相機來發展機器人,並結合彩色模型和形狀分析技術找出臉部範圍,可以清楚觀察物體 臉部表情,進一步可應用與人互動的機器人上[9]。此部分自動分析臉部技術,可以輔助行動不便與老 弱人士在與人互動過程中,即時透過載具之攝影機與影像處理機制,辨識周圍人物。此外,隨著可攜 式產品應用需求的增加,低功率無線通訊系統的重要性日趨重要。近來 ZigBee 是個常被學界與業界 爭相探究的通訊系統。目前 ZigBee 通訊系統的應用主要以工業、家庭、醫學控制以及感測需要為目 標[10]。近年來也應用在智慧型空間中之健康照護上[11],其功能與特性可進一步開發,應用到行動不 便人士之情境熟悉與環境控制上。
即時定位系統是目前無線感測網路相當熱門的研究主題,其可應用於本計畫之載具訂位與監控系 統。在以 RFID 定位為基礎的情況下,可以大略簡單的分為四種模式。第一種模式[12][13]即為所追蹤 的物體是屬於發射器(例如︰主動式的 RFID 標籤)的種類,透過接收器(RFID Feader)接收的標籤資訊,
來進行追蹤物體的定位,但是在此模式當中,其可能在較小的環境中,深受 Multi-Path 影響以及標籤 數量過多產生彼此之間的訊號干擾;第二種模式[14]為在目標物體上放置接收器,且於物體移動的過 程當中,可以接收環境中標籤的資訊,藉此計算物體本身的所在位置;第三種模式[15]為在追蹤物體 上放置收發器,並且透過與其他物體交換資訊的方法,來作為自身的定位;第四種模式[16]為物體上 皆不放置發射器或者收發器,僅僅透過環境當中 RFID 標籤的 RSSI 值的特性,即訊號強弱的分佈或者 衰變程度來作為定位資訊。在此計畫當中,我們是採用第二種模式來搭配應用,即為載具上掛載 RFID 的接收器,並且隨時接收環境中的標籤的訊息封包,以此作為定位之用。
在另一方面,電力系統的延續是移動載具重要的議題。自動充電系統常應用於全自主機器人之電 力供應系統(如 Roomba 自動吸塵器機器人)。機器人自動充電站之設計可於充電站製作一個像擴音器 形狀的物件 [17],這樣設計的好處是可以引導載具的充電棒精確的插入充電站內進行充電。而國內研 究方面也有類似的設計,其在機器人充電槽附近的板子稍作傾斜,並在電池棒加入彈簧輔助機構進行 充電棒插入引導 [18]。然而,目前自動充電之方法對於載具之稼動率並不高,其原因是當載具進行充 電時,載具是無法使用的,因此,這也是本計畫提出『自動電池更換』方法的主要原因之一。
四四四
四、、、 、 研究方法研究方法 研究方法研究方法
本年度計畫之研究主要重點為建立本計畫所提出之室內載具之使用情境,並進行情境設計、模擬 及拍攝。其次為創新載具人因設計、載具平台及操縱設計、個人化人機互動介面設計、定位與導航系 統設計、自動電池更換手臂機構設計及實現、臨床評估量表設計及問卷等;其涵蓋總計畫及六子計畫 之工作。
4.1 情境設計與模擬情境設計與模擬情境設計與模擬(情境設計與模擬(((總計畫及所有子計畫協同合作總計畫及所有子計畫協同合作總計畫及所有子計畫協同合作總計畫及所有子計畫協同合作))))
生活情境之模擬是本計畫核心部份,其也是第一年執行之重點。本計畫生活情境設計考量是針對 感知退化、肌力退化及視覺退化的使用者或者老人,設計具有親和性之載具平台。為了陳述此一概念,
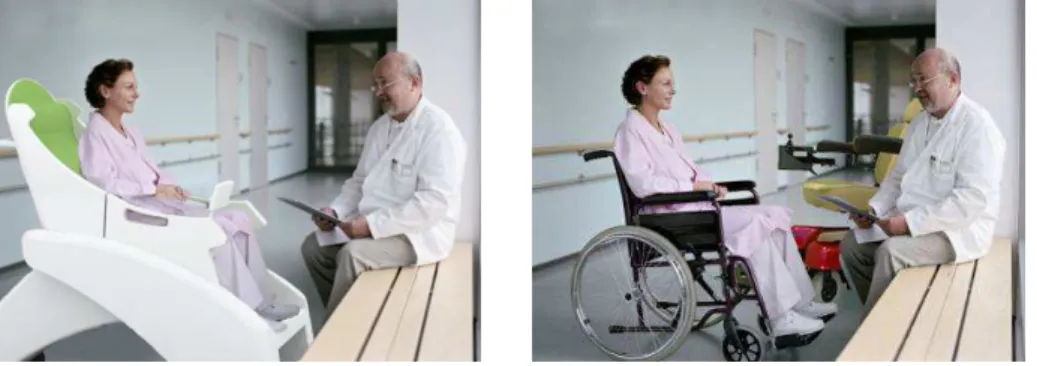
表 C012-1 共 20 頁 第 5 頁 本報告以圖二進行對比說明,此一圖可以明顯地區別出『傳統電動輪椅』、『手動輪椅』以及『本計畫 所提出創新前瞻室內載具』之兩位老人於長廊對話的情境上的差異。如果把傳統電動輪椅或手動輪椅 更換成本計畫所提出之創新載具後,其情境畫面將更為協調,其也更符合人因設計以及居家融入性。
圖二 本計畫所開發載具(上左)與市售輪椅(上右)情境合成圖片
為了能契合使用者需求與臨床效能,本計畫之情境針對五大主軸來加以設計,其分別為:
1. 居家融入:室內載具必需能融入於居家裝潢;圖三所示為本計畫所研發之載具客廳融入情 境合成圖片。因此,本載具可以打破使用輪椅使用者即是殘疾的表象。此外,本載具不但 不會破壞居家裝潢的擺設,而且讓使用者使用起來是覺得有尊嚴的。
2. 容易操作:設計直覺式載具操控介面,以簡化使用者操控上的困難度。
3. 生理監控:以不外加固定貼黏電極之即時心電圖監控功能。
4. 前瞻設計:設計創新前瞻又能讓老人接受且居家融入之外型,成為本計畫之重點。
5. 智慧嵌入:結合智慧空間、互動介面、定位系統、導航系統、自動家電控制、自動電池更 換等機制,提高載具之智慧性,並增加使用上的便利性及安全性。
圖三 本計畫所研發之載具客廳融入情境合成圖片
因此,針對上述情境設計需求,本載具所提出的解決方案整合了以下功能(產品需求):、新前 瞻之居家融入性設計與輕量化結構設計、多操控自由度設計,並考量載具穩定性、節能與低噪音、新 式輪椅操控介面與力回饋之安全操作、智慧性行駛輔助與生理監控、移位輔助與坐姿變換、個別化服 務及區域定位以及情報環境取得與生活協助、視覺輔助與鎖定以及載具及使用者動作行為分析與預警、
路徑導引、自主導航與管理與操控顯示介面與載具續航力與電池交換。
本計畫之計畫執行主軸,如前所述包含三個部份,首先為創新前瞻設計,其為本計畫第一年度相 當重要的主軸之一。為了讓本計畫所開發的產品能夠從發想階段進行凝聚,並在未來進行產品擴散,
我們提出了『沙漏式產品收斂與延伸模型』,此一模型如圖四所示。首先,藉由每週的定期會議中進 行產品概念與模型之發想,並討論產品的外型、功能及相關人因設計。之後在眾多發想的產品模型中,
經過一次又一次的會議討論後,使其逐漸加以收斂,並於最後得出一個能符合本計畫執行精神以及人 因需求的產品,因此,本計畫所設計之室內載具是基於『計畫執行的目的』與『使用者需求』所加以 收斂而成的。
在定義出此一整合產品的所有功能、概念與雛形之後,我們嘗試將本計畫的產品與所有相關的關 鍵技術進行計畫的延伸,且此一延伸希望能運用到不同而且更寬廣的產品運用,其包括:居家照護機 器人、電動輪椅及保全機器人等,並將相關核心技術拓展應用到室內載具驅動模組、室內載具定位模 組等等。此外,本計畫也正進行相關的科專以及技轉的溝通和協調工作,並且已有廠商表達意願,願
表 C012-1 共 20 頁 第 6 頁 意與本計畫進行後續之科專計畫的提出及技術移轉等相關工作。此一部份內容將於後面章節做一詳細 介紹。
圖四 沙漏式產品收斂與延伸模型 4.2 創新前瞻人因設計創新前瞻人因設計創新前瞻人因設計(創新前瞻人因設計(((子計畫一子計畫一子計畫一子計畫一))))
本計畫在第一年是針對『使用情境及居家生活產品意象人因設計與分析』為主題,以人因介面及 情境模擬上所要發展具親和、舒適之設計宗旨。以使用者為中心導向的設計是要能體現:好的設計應 該貼切地考量使用者的經驗,而不是僅考量其機能上的效能,如此便可以拉近產品與使用者之間的溝 通鴻溝,讓產品具有智慧卻有親人性的特質。
研究方法上是針對以下方法進行設計:
1. 使用情境設計及呈現:是針對應用情境模擬的方法,發覺目標使用者之潛在需求,並將這些 需求應用於創造出具居家生活意象之智慧型輔具。研究方法是透過行為觀察、使用者訪談、
情境模擬 workshop,進一步思考及尋找產品機會出口及可達到貼近使用者想法或可能遭遇之 各種問題。
2. 產品需求分析:針對輪椅載具本身、家具元素與居家環境進行機能需求上之調查與分析,以 了解產品真正需求。研究方法是透過相關載具產品資料蒐集分析、本研發團隊之科技與工程 技術掌握、載具與其他設備用品之互動關係了解,來對於現有產品及居家空間環境之了解。
3. 居家生活產品意象訂定:針對輪椅載具本身、家具元素與居家環境進行機能需求上之調查與 分析,以了解產品真正需求。研究方法是透過居家生活情境模擬、居家意象 Image board 製作、
居家載具意象 Image board 製作等來對於居家載具產品意象之定位及情境確定。
4. 基礎人因資料蒐集分析:研究方法上是對於輪椅載具相關產品人因規格蒐集、輪椅載具相關 產品操作界面規格蒐集、居家一般傢俱空間尺寸規範蒐集,讓本計劃確切了解及蒐集現有相 關居家中傢俱空間尺寸及規範有其必要性。
此外,產品收斂的過程則採用以下四階段之發想與收斂過程而得到最後的產品模型:
1. 第一階段(水平發展)針對使用者在從事居家活動所面臨到的問題與情況做發想,透過腦力 激盪來找出使用上的問題、相關情境與提出初步概念來解決,並搜集居家產品意象來做造型 上的發想,利用相關居家圖片來輔助設計、應用、情境引導與發想。
2. 第二階段(水平發展):針對腦力激盪後產出圖面做初步歸納整理,大約區分出居家產品的幾 個系列,如: 輕量型、輔助站立型、科技型、居家沙發型、事務型、搖椅型、包覆型、人體工 學型,來做第二階段發展。
3. 第三階段(垂直發展):從輕量型、輔助站立型、科技型、居家沙發型、事務型、搖椅型、包 覆型、人體工學型等系列中挑選出較為符合居家意象的幾個系列(居家沙發型、包覆型、輕量 型等)概念圖來做後續的第三階段垂直發展階段。第三階段主軸希望在居家意象為基礎中再加 入前瞻科技感來做發展,希望找出具有居家意象外又有前瞻概念之移動載具。
表 C012-1 共 20 頁 第 7 頁 4. 第四階段(垂直發展):在居家意象的前瞻式移動載具概念圖的檢討中尚未得到滿意與真正較
為前瞻式的呈現,於是第四階段再進行更深入與更清楚之產品呈現方式,並從這裡開始以居 家意象、包覆感、前瞻科技、輕量為基調,提出保守型、包覆型、前瞻型三個方向做最後發 展。
4.3 創新生理監控操控設計創新生理監控操控設計創新生理監控操控設計(創新生理監控操控設計(((子計畫二子計畫二子計畫二子計畫二))))
對於傳統的電動輪椅或手動輪椅而言,大輪子以及大馬達是一般大眾的刻板印象。且大部份的電 動輪椅也是此類設計,但大馬達應用於室內載具是否合適,是本計畫所提出來的思考模式。表一所示 為針對傳統輪椅的設計以及本計畫創新『小型化驅動輪』之設計來針對馬達的尺寸、電池、續航力及 居家融入來加以評估和比較。對傳統輪椅來說,由於使用大尺寸以及大重量的馬達,因此其需要更大 的啟動電流,並耗費更多的電力;也因為這樣子,電池容量、尺寸及重量的需求也加大了。然而由於 龐大馬達與電池之尺寸與重量,會導致電動輪椅在設計上的限制,使其設計出的外型會相當龐大;此 外,由於馬達及電池的重量也將影響到節能特性,因此傳統的電動輪椅是相當耗電的,而且對於續航 力的影響也是相當大的。在另一方面,移動型的輪子在室內是常見的產品,如圖五所示之 OA 椅都具 有小型的滑動輪,此類型的輪子在轉向上的自由度相當高,因此其可增加使用者移動上的便利性。
表一 傳統輪椅與本計畫創新『小型化驅動輪』之比較表 傳統設計
傳統設計
傳統設計傳統設計 評估項目評估項目 評估項目評估項目 創新思考創新思考創新思考創新思考
大 馬達尺寸與重量 小
大 電池尺寸與重量 小
差 節能特性 優
差 續航力 優
差 居家融入性 優
針對上述之思考方向,本計畫針對了室內的載具平台之需求進行情境設計。首先針對節能,我們 重新定義出居家室內平台載具的需求。居家室內載具平台不能與一般的輪椅或輪型機器人來考量,因 為居家室內的需求是低速度、高扭力、安靜、省電及穩定。對於居家室內輪椅而言,每秒三十公分的 速度,可說是相當快了;然而對電動輪椅來講,每秒可高達兩公尺。所以在這樣的需求考量之下,本 計畫所提出來的概念不採用傳統的大型馬達,而以較小型且安靜的馬達來進行設計,因此如表一所示,
本計畫所提出的小尺寸馬達,具有低耗電及輕啟動電流,故其所需要的電池尺寸也就相對的比較小。
小重量的馬達及電池就不需要耗費大量的電力,故在整體載具的總重量的降低上具有相當大的優勢,
並可同時達到節能特性與續航力。最後,由於小型驅動輪的設計,使得此一室內載具在居家融入性上 優於傳統大型輪子的設計,並達到噪音的抑制、安靜以及穩定的需求。此外,部分情境(如本計畫受 測者許女士所提出之廚房作菜情境),傳統輪椅之前進與旋轉的運動模式無法滿足移動特性之需求功 能,因此,此一驅動模組在不傷害到地板或地毯之條件下導入全方位移動模式。最後,也對於下肢癱 瘓病患之壓瘡問題,本計畫也提出了坐姿變換的需求。
圖五 室內載具之驅動輪情境比較圖
此外,本計畫也提出『創新生理回饋操控介面設計』,傳統的電動輪椅對於老人而言,在狹小的 室內操控空間是相當的不容易,其原因在於搖桿操作範圍不大以及老人肌肉運動功能退化所導致。此 外,一般市面上的輪椅無法在沒有黏貼固定電極於身上時量取心電圖及脈搏。以上為兩種目前輪椅發 展過程中無法被解決的問題。而本計畫之創新點在於提出一個完整的解決方案,同時解決『創新操控』
以及『心電監控』等兩大議題。本計畫所設計之創新式輪椅操控介面,並不以搖桿當作操控介面,而
表 C012-1 共 20 頁 第 8 頁 是提出以左右兩手同時操作之操控介面,如圖六所示。
另外坐姿變換之設計也因為載具平台進行重新設計而加以修正,其機構運作方式如圖七所示。另 外在載具的側扶手亦可作成一移位時之小平台(Stage),此一小平台可以直接跨接床和載具座墊,提 供使用者在床與載具間進行更穩定且安全之移位程序。另外,本計畫亦設計一『照護人員』使用之動 力輔助把手。當使用者在睡眠或者休息時,載具會因為有接觸到觸控把手而輪椅呈現煞車模式以確保 安全時,此時對照護人員要移動載具將產生一大困擾。因此,本計畫也設計一動力輔助把手,應用順 從式(Compliance)的控制技術,當照護人員把『動力輔助把手』拉下時(如圖八所示),照護人員便 能輕易的使用動力輔助把手來將載具進行前進、後退、轉彎的移動目的。
驅動輪位置 滑動推桿
操作介面
動態阻力器 電極 操作方向
紅外線位 置感知器
圖六 創新生理回饋操控介面設計 4.4 個人化互動介面設計個人化互動介面設計個人化互動介面設計(個人化互動介面設計(((子計畫三子計畫三子計畫三子計畫三))))
本子計畫研究下肢肢障人士運用輕型載具與生活環境互動之控制系統。藉由在輕型載具上裝設適 當的攝影機、感測網路控制器以及提供圖像式之簡易控制人機介面,提供使用者與環境互動的簡易控 制系統。相關研究方法包括:
圖七 載具坐姿變化與移位之概念設計
圖八 照護人員動力輔助把手設計
1. 個人化照護系統建置:運用 802.11a/b/g 建立無線區域網路,將載具觸控介面連上網路,伺服 端以 Microsoft SQL Server 建置參數資料庫,搭配無線網路技術做動態連結更新與管理(包括 使用者生理參數、用藥與就診資訊等),即可與載具系統達成資料同步更新。照護端監看資料 包括:載具使用者即時影像;歷史心跳血壓;用藥就診處方等資訊。
2. 無線控制家電系統:無線控制家電系統使用符合 IEEE 802.15.4 規範之無線感測模組(Zigbee),
整合繼電器電路設計,以控制檯燈及電扇之開關。無線感測器亦可整合控制電動窗簾管狀馬
表 C012-1 共 20 頁 第 9 頁 達以捲動窗簾。圖九(左)所示為無線感測功能說明;Coordinator 功能為發起一個網路,並 設定網路參數,分派網路位址並規範網路位址分發原則,Router 功能為加入與離開某個感測 網路,並對封包作安全性處理,達成繞送封包到目標節點,End Device 為終端節點,負責收集 資料並透過協定交換訊息。圖九(右)為實作說明;於介面系統連接感測器 Coordinator 發起 感測網路並發出控制訊號,經 Router 傳輸給 End Device,便可控制電器開關,達到遠端無線 控制之目的。
圖九 個人化人機介面之無線感測概念說明
3. 智慧型人機介面設計:使用 Microsoft Visual Studio 2008 平台開發智慧型人機介面,以人性化 操作為設計理念,採用觸碰式互動輸入技術,整合包含家電控制畫頁之無線控制模組、人物 追蹤畫頁之 PTZ 攝影機控制模組、與無線網路之遠端監控與連線技術,同時 Microsoft SQL Server 建置參數資料庫,搭配無線網路技術進行動態連結更新與管理,並使用電容式觸碰面板 作為實驗智慧型操控介面之技術工具。
4.5 定位與導航定位與導航定位與導航(定位與導航(((子計畫四子計畫四子計畫四子計畫四))))
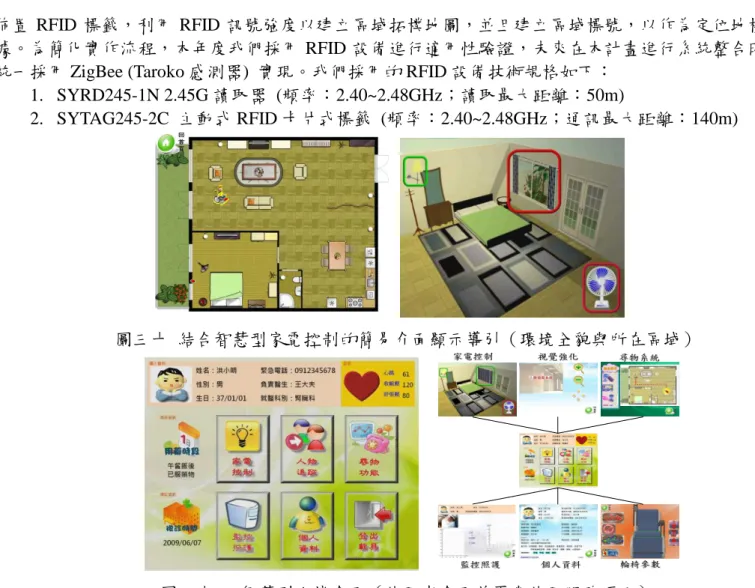
本子計畫第一年的技術重點在於定位環境之建置,並完成區域定位演算法以及其對應區域拓樸式 地圖的建立。我們於研究中採用了主動式的 RFID 標籤以及讀取器,讀取器即時接收標籤所發送出來 的封包資料,並且藉由封包獲得各個標籤的訊號強度(RSSI: Receive Signal Strength Indicator),利 用此訊號強弱值的特性來應用在區域的定位當中,並考慮訊號強弱值與距離間的反平方比例原則。然 而考量於實際的環境當中,標籤信號能量可能因為透過介質的傳遞或反射,導致當接收器與標籤之間 的距離改變時,有時無法完全匹配訊號與距離成平方反比的關係,因此於定位環境建置過程中,將 RFID 標籤加裝隔絕材料後佈置於環境中,以阻絕訊號能量透過牆壁傳遞,以降低訊號誤差。
在完成標籤佈置之後,觀察標籤的訊號強弱分佈程度,我們發現於固定區域中的訊號強度雖受 時間與環境影響,但標籤訊號的相對強弱排列仍符合一定序列,該順序於室內區域定位上足以作為區 域劃分之表示法。因讀取器具備即時接收環境中所有標籤的訊號強度的能力,系統於接收到標籤訊號 強度時,便即時依照強弱值進行排序,並且挑選訊號前三強的標籤標號作為一個區域的標示。有了區 域的編號以及訊號的強弱資訊,透過載具的移動,讀取器可以即時接收訊號,進行與環境中各個區域 的編號比對,便可以得知載具目前的所在區域,藉此以達到載具定位的效果。
基於上述相對無線訊號強度值與室內地圖之間的關係,因此我們使用高階 Voronoi Diagram 表示 法來代表實際的區域分佈情況,根據所挑選的訊號資訊作為區域劃分編號,並且以標籤的位置作為三 階 Voronoi Diagram 的資料點位置,由其對偶圖定義可以得到室內定位的拓樸地圖,以此拓樸地圖來 逼近現實訊號區域分布情形。
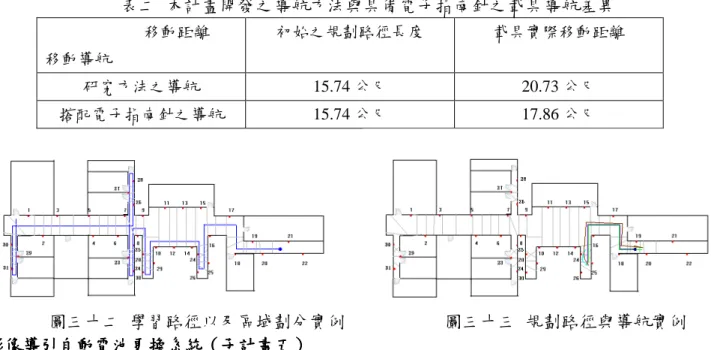
本年度我們亦完成初步的路徑規劃及導航部分,首先於路徑教導學習方面,在地標標籤佈建完成 後,我們首先指引輪椅於環境中收集定位區域資訊。載具透過掛載的讀取器在環境即時判斷其所在區 域,並且估計經過區域間的路徑長度,並建立各區域的代表點,完成路徑學習後的拓樸地圖包含了區 域代表點座標及區域間相鄰關係及相對距離。在路徑規劃導航部分,於使用者指定目的地後,智慧型 輪椅即規劃到目的地的最佳路徑,並以途中經過之區域做為導航依據。為考量輪椅移動之安全性,規 劃之移動路徑以地圖記憶之路徑為主,載具操作者接受導航指引而經過之實際路徑,則將列入以後規 劃路徑之參考。
4.6 影像導引自動電池更換系統影像導引自動電池更換系統影像導引自動電池更換系統(影像導引自動電池更換系統(((子計畫五子計畫五子計畫五子計畫五))))
本計畫第一年中我們設計一個輕巧靈活具有抽換電池能力之機器手臂,以及可不斷重複使用的電
表 C012-1 共 20 頁 第 10 頁 池交換機構模組,其設計流程如圖十所示,首先我們擬定手臂的機能如自由度、大小與負載進行功能 設定,之後參考現有的文獻蒐集相關資訊,設計初始手臂相關機構雛形,並藉由分析軟體檢視是否符 合需求,若符合則持續修改手臂相關細節並採購相關零件;實際採購零件的尺寸通常與設計有些不同,
因此進行第二次的修改細節,之後將進行手臂大型零件的發包與加工,經組裝與測試修改後完成手臂 硬體的架設。
圖十 自動電池更換手臂設計流程圖
為了使手臂末端點可以達到同方向平移運動,使得電池能夠順利抽換,手臂必須至少有三個自由 度才能完成,因此我們設計出一個平面式的肘節式機構(如圖十一),其特點是將一般二聯桿機構裡 控制第一聯桿的馬達與第二聯桿的馬達結合在同一軸上;其中一顆馬達是帶動整體手臂旋轉,另一顆 則是控制手臂內的角度,如此一來不但可以減少馬達對手臂所造成的彎矩負載,而且還能保有原本二 連桿機構的特性,而手臂上的關節除了使用徑向軸承固定軸之外,還使用止推軸承減少連桿間的摩擦 效應。動力來源則運用 RX-64 馬達,其特性具有體積小(40.2mm×61.1mm×41.0mm) 與最大輸出扭力大 (達 64kg-cm),可大幅縮小整體手臂佔用空間;抓取電池的方式係以真空吸取,採用直徑 40mm 之真 空吸盤吸取電池側面,藉此達到固定及抽換電池目的。在電池充電模組(如圖十二)設計方面,尺寸 設計為 230mm × 100mm 的長方形電池儲存盒以存放 7 顆磷酸鐵鋰電池,其優點為安全性高,壽命、
續航力長,充電速度快、環保…等等。電池模組外部設有孔洞,可放入彈片,使彈片露出與電池插槽 中的電刷接觸;內部彈片和電刷間的固定則是使用端子台來固定,並將電池線路焊接於電路洞洞板,
再將電路洞洞板固定於電池內;以這種獨立式的設計模組如果損壞可立即更換新品,更符合商品化的 特性。
圖十一 肘節式機構之機械手臂 圖十二 電池充電模組主要架構 4.7 臨床評估臨床評估臨床評估(臨床評估(((子計畫六子計畫六子計畫六子計畫六))))
本子計畫依據下肢肢體障礙人士及老人於室內生活的需求,建立室內載具實際操作之評估測試。
根據文獻資料常見於室內環境中評估輪椅使用情形,如電動輪椅室內駕駛評估、輪椅技巧測試 (wheelchair skills test, WST)、每日輪椅使用的功能性(Functioning Everyday with a Wheelchair;FEW)、 室內與戶外駕駛測試(Indoor and Outdoor Diving Trial)及魁北克科技輔具使用者評估量表(Quebec User Evaluation of Satisfaction with Assistive Technology tool;QUEST)。以下為本子計畫之研究方法:
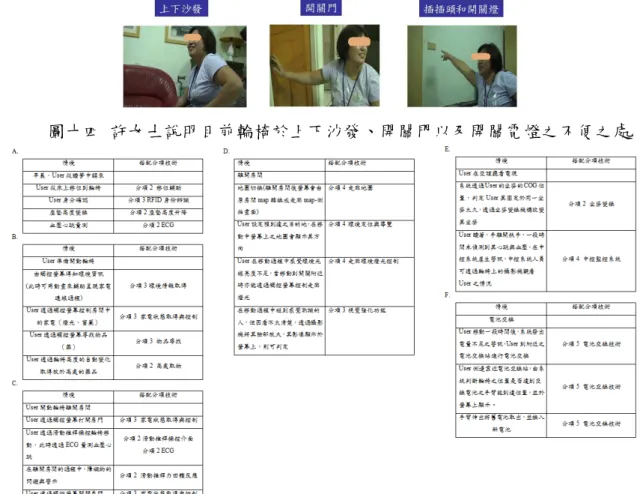
1. 以使用者(許小姐) 實際訪查其居家環境需求,了解其居家環境於操作輪椅之困難。
2. 實際記錄老人居家環境之困難。
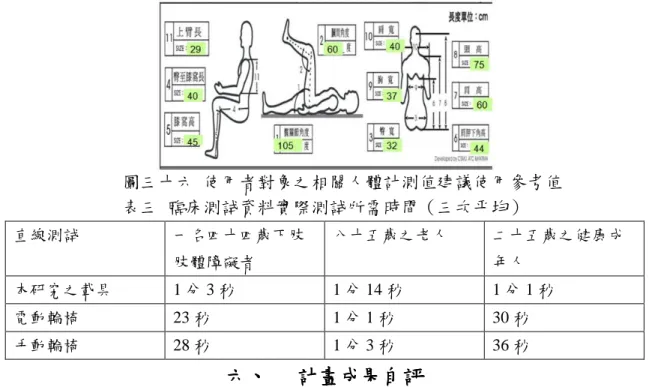
3. 人體計測值蒐集
4. 使用問卷及實際操作評估來觀察、探討及分析下肢肢體障礙、老人及健康成年人於實際操作之 情形,以便日後進一步之探討。問卷與實際操作之評估表
此外,驗證流程之相關步驟包括:
1. 填寫受試者同意書
2. 填寫問卷(個人使用輪椅之狀況及觀看影片後之評論) 3. 如合適者,進行實際操作輪椅,並使用量表進行評估
表 C012-1 共 20 頁 第 11 頁 4. 填寫實際操作後之問卷及意見
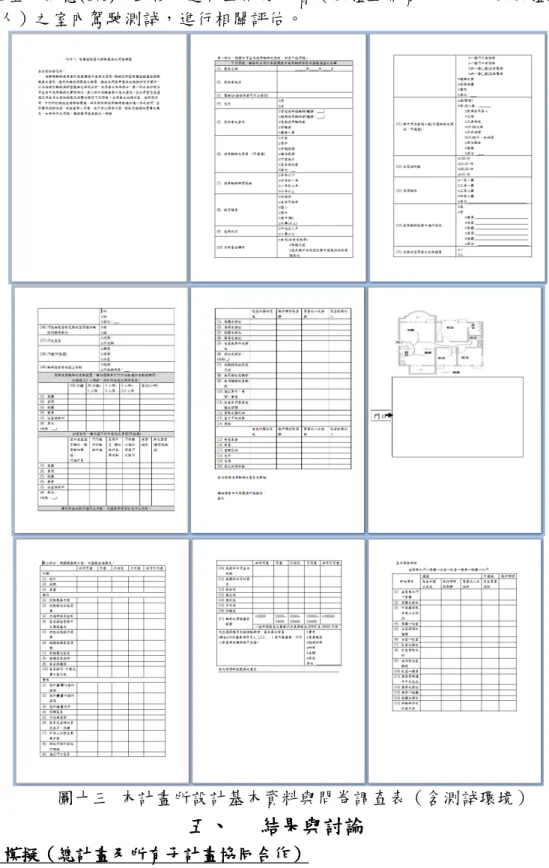
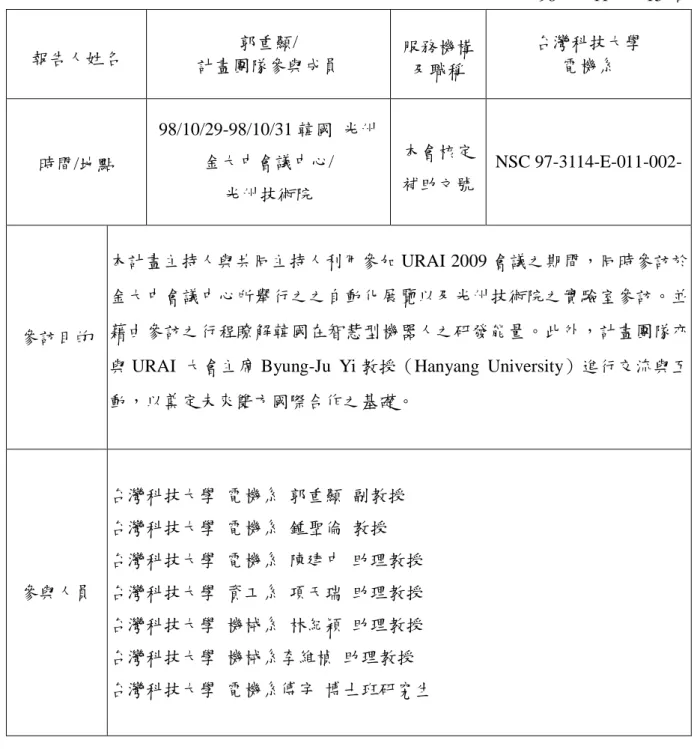
在評量記錄文件方面包括:基本資料與問卷調查表(如圖十三)以及每日輪椅使用的功能性(FEW),
其整合主觀使用的評量,使用問卷型式瞭解其於日常生活中居家使用輪椅之情形。以每日輪椅使用的 功能性,總共測試項目:10 項含穩定性、耐久性、獨立性、舒適性、健康需要、輪椅操作、伸手拿取 不同高度之物品、移位能力、個人照顧技巧、室內位移、戶外位移、個人/公共交通、評分方式為完全 同意(100%)至完全不同意(0%)。最後,進行三問使用者(肢體正常青年人、下肢肢體障礙壯年人、以 及健康 85 歲老人)之室內駕駛測試,進行相關評估。
圖十三 本計畫所設計基本資料與問卷調查表(含測試環境)
五五
五五、、、、 結果與討論結果與討論結果與討論結果與討論
5.1 情境設計與模擬情境設計與模擬情境設計與模擬(情境設計與模擬(((總計畫及所有子計畫協同合作總計畫及所有子計畫協同合作總計畫及所有子計畫協同合作總計畫及所有子計畫協同合作))))
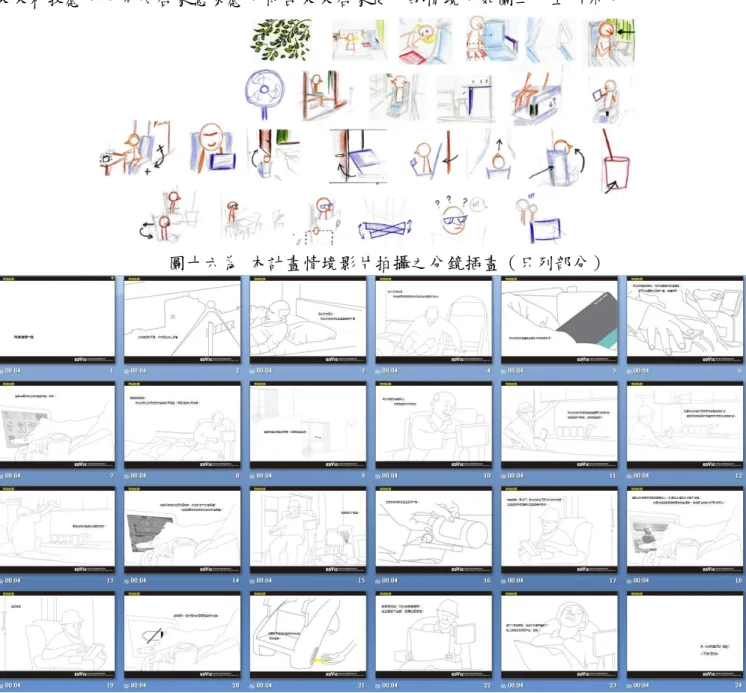
在情境模擬及製作上,本計畫分成四個部份來完成,包括『情境設計』、『分鏡處理』、『線稿描繪』、
『動畫繪製』。在『情境設計』上,為了定義出更精確的使用情境及產品需求,本計畫也針對了下肢 肢體障礙人士以及老人進行訪談。在下肢肢體障礙人士部分,我們兩度訪問了許女士(許女士現年 44 歲,是一位國小老師,她居住於一般公寓大樓,其病症為胸椎脊髓病變導致下肢截癱瘓),並請她進