Volume 22, No.4, 2017, pp. 291-301 DOI 10.6574/JPRS.2017.22(4).5
1逢甲大學航太與系統工程學系 助理教授 收到日期:民國 104 年 12 月 29 日
2中山科學研究院 研究員 修改日期:民國 106 年 05 月 11 日
3中山科學研究院 研究助理 接受日期:民國 106 年 05 月 23 日
* 通訊作者, 電話: 04-24517250 轉 3956, E-mail: [email protected]
無人飛行載具編隊飛行模擬平台開發與測試
賴盈誌
1*丁繹仁
2王婷
3摘要
本研究的目的是開發無人飛行載具(Unmanned Aerial Vehicle, UAV)之編隊飛行模擬平台,目標是開 發出多智能體硬體迴路模擬系統。主要的研究內容包含編隊飛行導航與控制、編隊飛行演算法開發、硬 體迴路系統設計以及模擬與驗證等項目,目標是做到使用模擬平台來進行固定翼載具與旋翼機的編隊飛 行控制與編隊演算法開發。本研究成功使用所開發的編隊模擬平台來驗證編隊控制器與編隊演算法。模 擬的結果顯示,所開發的模擬平台可用於兩種不同構型的載具,包含固定翼載具與旋翼機上,同時驗證 軟體迴路與硬體迴路模擬皆可以達到 UAV 編隊控制器與編隊演算法的驗證。
關鍵詞:無人飛行載具、固定翼載具、旋翼機、硬體迴路模擬
1. 前言
近年來隨著開源(Open-Source)系統與硬體的 普及,無人飛行載具(Unmanned Aerial Vehicles, UAV)的發展相當迅速,從原先的軍事用途、研究 實驗到目前的許多民間用途都可以看到 UAV 的身 影(Hein and Bento, 2008;楊宗岳等,2009),應用 的範圍與領域也越來越廣泛,尤其是在地理資訊、
國土監測、救災與勘災上,因此 UAV 已成為政府 與私人企業積極投入的重點研發項目。無人飛行 載具可以分為固定翼飛機(Fixed-wing aircraft,圖 1)、 旋翼機 (Rotorcraft, 圖 2) 與拍撲翼 (Flapping wing)三類,旋翼機擁有許多固定翼飛機所沒有的 特點,舉例如下:旋翼機可以朝任意方向移動,
而固定翼只能朝單一方向;旋翼機可以使用任何 速度移動也可以定點停懸,固定翼要以大於失速 速 度 飛 行 ; 旋 翼 機 可 以 做 到 垂 直 起 降 (Vertical Take-Off and Landing, VTOL),固定翼則是要在跑 道上起降。固定翼飛機的優點是可以做到長時間 與大範圍作業,而旋翼機的優點是適合在空間有 限的區域操作,並且可以執行定點搜救與監視的 任務。
隨著微機電系統(MEMS)與微處理器(MCU)的 發展突飛猛進,許多 MEMS 感測元件的尺寸已可 以微型化,耗電量也可以做到低電壓與低功耗,
四旋翼(Quad-rotor)的發展剛好搭上這一波潮流(圖 3),短短不到十年就已經引起廣大的重視,發展 出各式各樣的四旋翼或多旋翼(Multi-rotor)載具,
也成為許多從事 UAV 研究的學校與研究單位的新 研究方向(Lim et al., 2012)。四旋翼比固定翼擁有 更高的機動性與靈活性,可以在狹小與受限制的 空間內穿梭,加上擁有停懸能力,可以做到仔細 偵查與定點監視。相較於旋翼機,其機構較傳統 的直升機簡單,不需要自動傾斜盤(Swashplate),
可以省去斜盤故障與維修的麻煩,而且比拍撲翼 擁有更好的穩定度與操控性。
圖 1 固定翼 UAV 圖 2 旋翼 UAV
圖 3 四旋翼的外型與構造
多智能體(Multi-agent)的概念即是多架 UAV 一起合作執行相同目標的任務,每一架 UAV 都是 可以控制的獨立個體,但是透過一個主要決策系 統讓獨立個體進行分工合作,多智能體的優點是 可以提高工作效率、縮短作業時間、增加任務達 成率、降低使用單一個體的開發成本與難度……
等,多智能體可以將一個非常繁雜的任務分解成 許多簡單的小任務,再由多個獨立個體一起達成。
在自然界中多智能體的例子隨處可見,例如蜜蜂、
螞蟻以及鳥群等,集合群體的力量可以做到單一 個體所無法達到的目標。開發多智能體的條件是 個別主體具有一定的感測與控制能力,再加上快 速穩定的通訊系統,透過決策系統來統籌所有個 體的動作。多智能體比複雜的單獨個體擁有更高 的效率及強健性,尤其是在複雜的城市街道、交 通設施與建築物內操作,應用的範圍包含測繪、
偵查、搜索、定位、追蹤、運輸、投遞、火災與 自然災害救援……等,例如高樓火災現場勘災與 救援(Robuffo Giordano, 2012)。
目前國外以 UAV 進行多智能體的研究已如火 如荼的展開,特別是使用四旋翼作為載台,但是 開發的環境大多侷限在室內,感測與定位系統的 架構以高精度光學量測系統為主,最常見的架構 是使用動作捕捉系統 Vicon (Michael et al., 2010;
Cui and Inanc, 2012)。Vicon 系統包含多攝影機、
控制主機與分析軟體、貼在被追蹤物體上標記 (Marker),使用前需要將攝影機架設在物體動作範 圍的四周圍,並將標記依照特定的規則貼附在追 蹤物體的表面,接著將追蹤物體的虛擬骨架建置 在軟體上,再透過一連串的校正程序後才能做到
高速與精確的 3D 定位。使用 Vicon 開發四旋翼多 智能體的研究單位如美國賓州大學 GRASP 實驗室 (Kushleyev et al., 2013),該實驗室已經做到多智 能體的編隊飛行與隊形變換(如圖 4),Vicon 系統 負責提供所有四旋翼的姿態與位置,由桌上型控 制站負責接收 Vicon 系統的資料、計算個體的控 制命令、以高速傳輸介面與個體進行通訊,此架 構需要非常高的運算量與通訊速度,因此當群體 過於龐大時,採用分散式的架構,由不同的控制 節點負責部分群體的控制。
圖 4 GRASP 實驗室使用 Vicon 進行 20 架四旋翼編
隊(Kushleyev et al., 2013)
本研究將同時使用固定翼載具與旋翼機來做 為多智能體的載台,固定翼飛機選用小型的馬達 動力飛機,旋翼機則是採用四旋翼,開發無人飛 行載具多智能體的實驗平台(Waslander et al., 2005;
Nathan et al., 2011) 。 將 以 硬 體 迴 路 模 擬 (Hardware-In-the-Loop, HIL)來開發 UAV 編隊飛行 模擬平台,硬體迴路模擬為一種結合真實硬體的 模擬方法,用於嵌入式系統的開發和測試的技術,
經由硬體迴路模擬我們可以測試並運算各種動態 系統。硬體迴路中嵌入式系統與飛行模擬彼此相 互作用,硬體迴路模擬使用虛擬的環境與載具來 取代感測器與致動器,嵌入式系統取得虛擬的感 測資訊後進行計算,並輸出虛擬的控制輸入到模 擬的載具上進行控制。在許多情況下是得將嵌入 式系統於真實飛機上測試的,但是在其他的情況 下硬體迴路模擬是更為有效率的方法,不但能節 省成本與時間,也能提高測試質量、縮短開發日 程、具有安全性與減少人為因素的損失問題。研 究的方向主要為編隊飛行演算法、導航與控制系 統、姿態穩定與控制器之設計及開發,採用的編
隊 演 算 法 為 虛 擬 長 機 與 動 態 導 航 點 (Dynamic Waypoint)的架構(Guerrero et al., 2010;Davidi et al., 2011),並且使用軟體模擬與硬體迴路模擬的方式 驗證編隊飛行演算法與控制器。
2. 編隊飛行演算法與控制 器設計
2.1 固定翼編隊架構與演算法
固定翼飛機與旋翼機的飛行動態有著極大的 差異,最主要的差異在於固定翼飛機需要保持一 定的飛行速度以產生足夠的空速,如此才能提供 足夠的升力來維持穩定飛行;而旋翼機則沒有此 限制,可以做到完全停懸與任意方向的移動,包 含垂直與水平移動。因此對於固定翼的編隊架構 而言,速度與航向的控制對於編隊的結果有關鍵 的影響。圖 5 為本研究採用的固定翼飛機編隊架 構,先設定好長機(Leader)與僚機(Follower)的預 定偏移距離 D 與方位角θ ,透過下列方程式計算 出僚機所要追隨的動態導航點為(X , Y )。
sin cos
follower leader d leader
follower leader d leader
X X
Y D Y ... (1)
圖 5 固定翼飛機編隊架構
2.2 導航點追蹤
透過導航點(WayPoint, WP)追蹤可以讓長機與 僚機同時追隨預定的軌跡,對於長機而言,所追 隨的導航點可以設置通過半徑,讓長機可以依照
規劃的導航點執行任務,對於僚機而言,導航點 將不具有通過半徑,如此可以確保僚機永遠追隨 預定的導航點與軌跡。導航點追蹤的示意圖如圖 6 所示,當載具進入到通過半徑的範圍時,即判 定通過導航點,並朝下一個導航點飛行。
圖 6 導航點追蹤示意圖
2.3 固定翼編隊控制器設計
本研究採用的控制器設計是先模擬出長機的 動態,再由長機的位置產生相對的動態導航點,
讓僚機追隨此相對的動態導航點。圖 7 為編隊控 制器架構,由左邊方塊圖的長機所產生的位置、
速度與姿態資訊開始,僚機的控制器設計分為內 迴圈的姿態控制與外迴圈的相對位置編隊控制,
外迴圈的相對位置導航系統接收來自長機的位置、
速度與姿態資訊號,透過相對位置與相對速度的 計算,經由縱向、橫向與垂直編隊控制器產生目 標 姿 態 , 所 採 用 的 編 隊 控 制 器 為 模 糊 控 制 器 (Fuzzy Logic Controller, FLC)。內迴圈姿態控制在 取得目標姿態後,透過所設計的姿態估測器回授 載具的姿態與角速度等資訊,計算出姿態誤差後,
再由所設計的姿態控制器操控載具,朝向目標的 位置靠近。相對位置、相對速度與目標姿態的計 算如下列方程式所示:
,2 1 2 cos 2 1 2 sin 2
xr y y x x
,2 1 2 sin 2 1 2 cos 2
yr y y x x ... (2)
,2 1 2
zr z z
,2 ,1cos 2 1 2 ,2 ,2
r h r h
x v y v
,2 ,1sin 2 1 2 ,2
r h r
y v x ... (3)
,2 ,1 ,2
r U U
z v v
,2 ,2 ,2,
xr r r desired
e x x
,2 ,2 ,2,
yr r r desired
e y y ... (4)
,2 ,2 ,2,
zr r r desired
e z z
其中 , 、 , 、 , 、 ̇ , 、 ̇ , 與 ̇, 分別為 三軸的相對位置與相對速度, 、 、 、 、 與 分別為長機與僚機在 ENU 座標上的位置,
, , 、 , , 與 , , 為僚機的目標 位置, , 、 , 與 是僚機的位置誤差。圖 8 為 採用的編隊控制器架構,舉橫向控制為例,FLC 的輸入為橫向位置誤差與僚機的目標速度,透過 FLC 計算出目標的滾轉角,將輸出的滾轉角減去 估算的滾轉角即為目標的滾轉角。內迴圈姿態控 制在接收到目標姿態角後,透過內迴圈姿態控制 器將載具控制到目標姿態,即可讓僚機朝目標的 動態導航點前進,達到編隊的效果。
圖 7 固定翼載具編隊控制器架構
圖 8 縱向、橫向與垂直位置編隊控制
2.4 旋翼機編隊控制
本研究旋翼機的編隊演算法與固定翼一樣,
都是採用虛擬長機的架構(Guerrero et al., 2010;
Davidi et al., 2011),虛擬長機最主要的優點是長 機不存在,因此不會有長機失效而造成編隊失敗 的情形發生,所有僚機才是編隊飛行的主體,而 且僚機的相對位置可以任意置換。虛擬長機主要 的目的是產生平滑的參考軌跡,僚機再依照虛擬 長機的位置透過編隊演算法將各自的目標相對位 置計算出來,由個別的飛行控制器將載具控制在 預定的路徑上。本研究預計將虛擬長機的飛行動 態與控制器結合到地面站的程式之中,虛擬長機 的動態與路徑計算將符合實際四旋翼的運動模型 與飛行控制,虛擬長機的位置將採用全部僚機的 虛擬質心(Virtual Center of Mass)(圖 9),虛擬長機 也會依照僚機實際的相對位置來調整飛行狀態,
以免發生僚機因環境干擾或其他不確定因素而脫 離編隊之隊形。
圖 9 以僚機虛擬質心作為虛擬長機
2.5 旋翼機編隊控制器設計
由先前提到旋翼機的運動方式與固定翼載具 不同,主要的差異在於速度控制的部分,就懸翼 機而言,控制器架構可以不用考慮引擎速度控制,
因為橫向與縱向的編隊控制均可使用姿態控制來 完成。四旋翼的全機運動模型如方程式(5)與(6)所 示,方程式(5)為四旋翼的線性運動方程式,為載
具各方向受力與馬達推力之關係式,控制輸入為 馬達所產生的推力 u,由方程式(5)可以得知四旋 翼的水平位置(x,y)與垂直高度(z)是受推力 u 與三 個尤拉角(ϕ, θ, ψ)所決定,因此本研究的四旋翼的 自主飛行控制設計將分為水平位置控制與垂直高 度控制兩個部分。方程式(6)為四旋翼之旋轉運動 方程式,控制輸入為三個尤拉角的力矩輸出 ̃ 、
̃ 、 ̃ ,其中 ̃表示由對稱位置的馬達因轉速不同 所產生的旋轉力矩,在控制上可將此三個尤拉角 的力矩獨立出來,因此三個尤拉角的姿態控制可 獨立運作。
) sin sin cos sin 1 (cos
u x m
) cos sin sin sin 1 (cos
u y m
... (5)
g mu
z
1 coscoscos
~
~
... (6)
~
2.5.1 姿態控制
在姿態控制器設計方面,採用的姿態控制架 構如圖 10 所示,內迴圈將使用增穩系統(SAS)來 提高系統的穩定度,外迴圈位置控制的設計將使 用 PID 控制器為主,未來將設計其他控制器來評 估適用於旋翼機編隊的控制設計,內迴圈的角速 度與外迴圈的姿態迴授為 HIL 模擬主機回傳之姿 態資訊。
圖 10 姿態控制方塊圖
2.5.2 水平位置控制
由方程式(5)得知,控制水平位置的輸入包含 推力與三個尤拉角,本研究將固定航向角 = 0,
也就是說讓四旋翼的機頭(Heading)永遠指向正北 方。四旋翼的水平位置控制將使用內外迴圈的控 制設計,外迴圈為位置控制、內迴圈為姿態控制。
當 = 0時方程式(5)中的 x 與 y 可以簡化為方程式 (7)與(8),此時位置控制可以再簡化為 x 與 y 方向 兩個位置控制器,可由 yd方向控制器決定 後,
再由 x 方向控制器算出 ,如此可以簡化位置控 制的複雜度,將位置控制器簡化為前進與側移兩 個方向來控制,簡化後的水平位置控器方塊圖如 圖 11 所示。
) sin 1 (cos
mu x
...
(7) 1 sin m u y
...
(8)圖 11 水平位置控制方塊圖
2.5.3 垂直高度控制
由方程式(5)中可以得知,垂直高度 z 方向的 控制與水平位置控制不同,除了推力與尤拉角以 外,還受到重力的影響,因此無法只透過姿態控 制來達到高度控制,還要透過推力控制才有辦法 做到,而且當姿態傾斜愈大時所需要的推力就越 大。本研究的高度控制方塊圖如圖 12 所示,外迴 圈為高度控制、內迴圈為馬達推力控制,外迴圈 由目標高度與感測高度計算出高度誤差後,透過 高度控制器輸出目標的四旋翼垂直速度,再由內
迴圈的速度控制器計算出要增加或減少的推力,
如此便可以達到高度控制的目標。
圖 12 垂直高度控制方塊圖
3. 硬體迴路模擬系統建置
3.1 硬體迴路模擬系統建置
本研究的目標是開發 UAV 的編隊飛行模擬平 台,將使用硬體迴路模擬系統來建置此平台,以 驗證 UAV 多智能體的自主飛行與編隊飛行能力。
硬 體迴 路模 擬採用 的飛 行模 擬軟體 為 X-Plane Flight Simulator(圖 13),並使用 C++ builder 開發出 具有 UI(User Interface)介面的地面控制站(Ground Control Station, GCS)(圖 14),GCS 透過使用者資 料包通訊協定(User Datagram Protocol, UDP)與 X-Plane 進行資料溝通,再透過 RS-232 介面與機 載電腦(On-Board Computer, OBC)進行資料溝通,
編隊飛行控制的計算是在 OBC 上完成,OBC 將計 算好的控制命令傳送到 GCS 上,透過 GCS 再傳給 X-Plane 進行載具的控制。固定翼載具的硬體迴路 架 構 如 圖 15 所 示 , X-Plane 透 過 UDP 將 IMU(Inertial Measurement Unit) 、 GPS(Global Positioning System)與 Air Data Sensor 的感測器模 擬資料傳送到 GCS 進行處理,固定翼載具使用的 OBC 為 ARM 嵌入式系統,ARM 使用上述的感測 器資料進行編隊飛行控,再將計算完的控制命令 透過 Actuator 方塊,傳到 X-Plane 進行飛行控制。
圖 13 X-Plane Flight Simulator
圖 14 UI 介面的地面控制站(GCS)
圖 15 固定翼載具的硬體迴路架構
3.2 旋翼機硬體迴路架構
旋翼機的硬體迴路模擬系統與固定翼載具類 似,最大差別在於 OBC 的部分,本研究的四旋翼 的飛控電腦是採用 ArduPilot Mega(APM),因為 APM 採用的資料傳輸格式是使用 MAVLink 函式
庫(Meier et al., 2013),因此在 GCS 裡面同樣使用 MAVLink 函式庫來進行資料溝通。本研究分為兩 個部分,第一個部分是虛擬長機與單僚機的編隊 (圖 16),第二個部分為虛擬長機與多僚機的編隊 (圖 17),因為每台僚機都要使用獨立的載具的模 擬環境,因此為了分散電腦的運算量並且模擬出 實際使用的情境,將使用獨立的電腦來模擬每一 架 僚 機 , 僚 機 之 間 的 通 訊 使 用 美 國 Digi International 的 XBee®通訊網路來溝通。本研究將 先進行單台僚機模擬,完成之後再行多台僚機的 模擬,導航點排程與編隊演算法將在 GCS 上進 行。
圖 16 單台僚機硬體迴路模擬
圖 17 多台僚機硬體迴路模擬
4. 模擬與結果討論
在進行硬體迴路模擬之前,先以軟體迴路模 擬進行導航點追蹤與編隊演算法的驗證,軟體迴 路模擬與硬體迴路模擬的差別在於軟體迴路不使 用 OBC,直接使用 GCS 來執行導航點追蹤與編隊 控制器。
4.1 固定翼載具模擬
4.1.1 軟體迴路模擬
軟體迴路模擬是一個比較理想的模擬,因此 適合用於編隊控制器與編隊演算法的驗證上。在 固定翼載具的軟體模擬上,採用 X-Plane 內建的 PT-60 模型飛機進行模擬,模擬所使用的預定偏移 距離 D 為 50 m,目標方位角 為±150°,模擬的 結果如表 1 所示。圖 18 為模擬的軌跡,圖 19 為模 擬的垂直高度變化,由這兩張圖可以得知,所採 用的編隊控制器與編隊演算法皆有相當不錯的表 現,水平距離誤差在 10 m 以內,垂直距離在 1 m 以內。
表 1 軟體迴路模擬結果(D與 ) mean Standard deviation D(Follower 1) 43.17m 2.26m
d
(Follower 1) -150.36° 2.70°
D(Follower 2) 42.17m 2.49m
d
(Follower 2) 149.67° 2.87°
圖 18 軟體迴路模擬之二維軌跡
圖 19 軟體迴路模擬之垂直高度變化
4.1.2 硬體迴路模擬
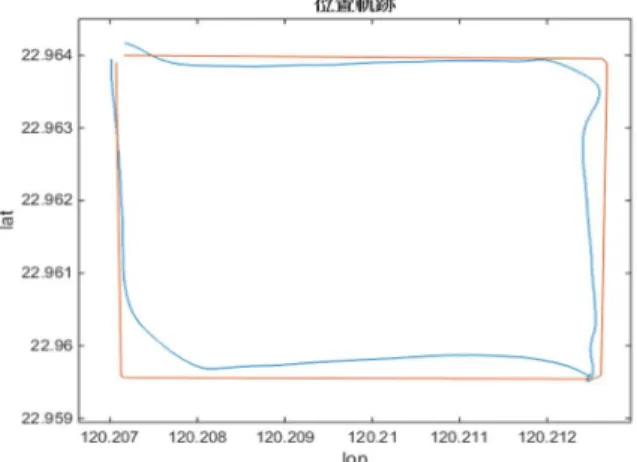
在硬體迴路模擬中,為了讓模擬的載具接近 實際開發的載具,在 X-Plane 中採用的載具是自行 建立的模型 SW-X3。模擬的路徑如圖 20 所示,導 航點為 WP1 與 WP2,實線為預訂的飛行路徑,藍 色為模擬的載具飛行路徑。圖 21 為所模擬的誤差 結果,結果顯示載具在切換到自主飛行模式後,
快速將橫向距離誤差 dy 降到 2 m 以內,航向誤差 在抵達 WP2 前也降到 5°以內,高度誤差則是在 2 m 左右,模擬的結果顯示導航點追蹤與編隊演算 法可以達到預期目標。
圖 20 硬體迴路模擬之飛行軌跡
圖 21 硬體迴路模擬之外迴圈控制結果
4.2 旋翼機模擬
4.2.1 軟體迴路模擬
旋翼機的軟體迴路模擬架構與固定翼載具相 同,皆是透過 GCS 來執行編隊控制器與編隊演算
法。採用的 GCS 如圖 22 所示,此介面可以設定僚 機的數量與預定偏移距離,也可以設定載具的最 大移動速度與最大轉彎角速度。圖 22 中綠色載具 為虛擬長機,外圍為三台紅色載具為僚機,圖中 黃點是由虛擬長機所計算出來的動態導航點,這 些點即是僚機所要追隨的目標,並且依照編隊演 算法與僚機數量去產生,動態導航點的移動速度 與角速度依據虛擬長機的動態去設定。模擬的結 果如圖 23 與圖 24 所示,圖 23 中紅叉為自行設定 之長機導航點,藍線為僚機一導航點路徑,橘線 為僚機二導航點路徑,黃線為僚機三導航點路徑。
圖 24 中藍線為虛擬長機軌跡,紅線僚機一動態導 航點軌跡,黃線為所模擬的飛行軌跡,結果顯示 僚機皆可追隨動態導航點的軌跡,即使是在導航 點變換時,動態導航點因轉彎而產生快速移動圓 曲線軌跡,僚機都可以迅速跟隨到動態導航點的 位置。
圖 22 旋翼機三台僚機編隊模擬
圖 23 長機導航點與三台僚機之模擬路徑(藍色、
紅色與黃色)
230 235 240 245 250
Time(sec) -50
0 50
100 dy v.s. Time
230 235 240 245 250
Time(sec) -40
-20 0 20
40 Heading Error v.s. Time
230 235 240 245 250
Time(sec) -5
0 Altitude Error v.s. Time
圖 24 虛擬長機軌跡(藍色)與僚機一動態導航點 軌跡(紅色)及模擬路徑(黃色)
4.2.2 使用 X-Plane 進行軟體迴路模 擬
在此模擬中使用的載具為 X-Plane 的四旋翼模 型(圖 25),以軟體迴路的方式進行載具的內迴圈 與外迴圈控制器之驗證。於 GCS 上先設置 4 個導 航點,再由虛擬長機的動態去產生僚機的動態導 航點。模擬的結果如圖 26 與圖 27 所示,圖 26 為 水平位置控制的模擬結果,圖上紅色為虛擬長機 的軌跡,藍色為僚機的模擬軌跡。圖 27 上為垂直 高度控制模擬結果,載具從地面起飛後,經由垂 直高度控制器將載具維持在預定的高度,就算是 載具在轉彎的過程中造成誤差增加,控制器仍然 可以快速將載具的高度維持在預定高度。
圖 25 旋翼機在 X-Plane 中的模擬結果
圖 26 水平位置控制的模擬結果
圖 27 垂直高度控制模擬結果
5. 結論
本研究成功開發出無人飛行載具(UAV)之編 隊飛行模擬平台,模擬平台包含軟體迴路模擬與 硬體迴路模擬(HIL)系統,採用的 UAV 載具分為 固定翼載具與旋翼機,在此選用四旋翼作為旋翼 機之測試載具。成功使用所開發的編隊模擬平台 來驗證編隊控制器與編隊演算法。模擬的結果顯 示,所開發的模擬平台可用於兩種不同構型的載 具,包含固定翼載具與旋翼機上,同時驗證軟體 迴路與硬體迴路模擬皆可以達到 UAV 編隊控制器 與編隊演算法的驗證。本研究模擬的條件並未考 慮載具之間的傳輸延遲、通訊頻寬與系統延遲等 問題,這些問題將會影響多台載具在編隊控制時 的準確度與響應速度,進而增加編隊的姿態與位 置誤差,因此將來在實作上需要提高載具姿態與 位置控制之安全裕度,以避免因系統不確定性造
成編隊無法達到預期目標。除此之外,未來也應 將感測器的雜訊加到模擬平台中,如此可讓平台 更接近真實系統,同時可計算出雜訊所產生誤差 大小,並且設計出具有強健性之控制器來減低雜 訊之影響。未來將使用此平台來驗證多智能體系 統,讓所有載具可以進行編隊也可以分工合作來 完成複雜的任務,例如在大範圍面積進行目標搜 索,藉由路徑規劃與多機協調的功能來降低搜索 的時間。未來也將使用實際飛行載具來驗證所開 發的編隊控制器與編隊演算法,完成實機驗證,
加速未來實際應用的實現。
誌謝
本研究之計畫經費由科技部補助,計畫編號 MOST 103-2221-E-035-067- 及 MOST 103-2632-E-035-001-MY3,特此致謝。
參考文獻
楊宗岳、羅國峯、林永仁、黃勤財,2009。應用無 人飛機於公路防、救災之可行性探討,臺灣公 路工程,35(12):2-9。[Yang, T.Y., Luo, G.F., Lee, Y.R., and Huang, C.T., 2009. Feasibility study of the application of unmanned aerial vehicles to highway disaster relief, Taiwan Highway Engineering, 35(12):2-9.(in Chinese)]
Cui, Y.N., and Inanc, T., 2012. Multiple air robotics indoor testbed, Control and Decision Conference (CCDC), 2012 24th Chinese.
Davidi, A., Nadav B., and Shai A., 2011. Formation flight using multiple integral backstepping controllers, Cybernetics and Intelligent Systems (CIS), 2011 IEEE 5th International Conference on.
Guerrero, J.A., Isabelle F., Sergio S., and Rogelio L., 2010. Flight formation of multiple mini rotorcraft via coordination control, Robotics and
Automation (ICRA), 2010 IEEE International Conference on.
Hein, G., and M de F Bento, 2008. Unmanned air vehicles an overview, Inside GNSS magazine 3 (1).
Kushleyev, A., Daniel M., Caitlin P., and Vijay K., 2013. Towards a swarm of agile micro quadrotors, Autonomous Robots 35 (4):287-300.
Lim, H., Jaemann P., Daewon L., and H J.K., 2012.
Build your own quadrotor: Open-source projects on unmanned aerial vehicles, Robotics &
Automation Magazine, IEEE 19 (3):33-45.
Meier, L., Camacho, J., Godbolt, B., Goppert, J., Heng, L., and Lizarraga, M., 2013. Mavlink:
Micro air vehicle communication protocol, Available at: http://qgroundcontrol.
org/mavlink/start, Accessed May 23, 2017.
Michael, N., Daniel M., Quentin L., and Vijay K., 2010. The GRASP multiple micro-UAV testbed, Robotics & Automation Magazine, IEEE 17 (3):56-65.
Nathan, Premeela T., Haider A.F. Almurib, and T Nandha K., 2011. A review of autonomous multi-agent quad-rotor control techniques and applications, Mechatronics (ICOM), 2011 4th International Conference On.
Robuffo Giordano, P., 2012. Multi-UAV bilateral shared control and decentralization, summer school airobots: Aerial Service Robotics, Eidgenössische Technische Hochschule.
Waslander, Steven L., Gabriel M.H., Jung S.J., and Claire J.T., 2005. Multi-agent quadrotor testbed control design: integral sliding mode vs.
reinforcement learning, Intelligent Robots and Systems, 2005.(IROS 2005). 2005 IEEE/RSJ International Conference on.
1 Assistant Professor, Feng Chia University, Department of Aerospace and Systems Received Date: Dec. 29, 2015
Engineering Revised Date: May. 11, 2017
2 Researcher, National Chung-Shan Institute of Science & Technology Accepted Date: May. 23, 2017
3 Research Assistant, National Chung-Shan Institute of Science & Technology
* Corresponding Author, Tel: 886-4-24517250 ext.3956, E-mail: [email protected]
Development and Testing of a Formation Flight Simulator for Unmanned Aerial Vehicles
Ying-Chih Lai1* Yi-Ren Ding2 Ting Wang3
ABSTRACT
The goal of this study is to develop a formation flight simulation platform for Unmanned Aerial Vehicles (UAVs). By using the developed platform, the formation flight control for multi-agent system can be designed and simulated. The multi-agent system comprises of more than one physically independent agent while having a common goal. The main tasks in this study contain formation flight navigation and control and navigation, formation scheme and algorithm development, Hardware-In-the-Loop (HIL) system setup, and flight simulation and verification. The adopted UAVs include fixed-wing and rotorcraft types. The quad-rotor UAV was selected to be the target aircraft for rotorcraft. This study successfully performed the formation flight controller and algorithm on the developed HIL platform. The results show that both the fixed-wing UAV and rotorcraft can be simulated on this platform.
Keywords: Unmanned Aerial Vehicle (UAV), Fixed-wing Aircraft, Rotorcraft, Hardware-In-the-Loop (HIL)