國立臺灣大學工學院機械工程學研究所 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
四軸整車轉向幾何與轉向機構之最佳化設計 Optimum Design of Steering Mechanism and Steering
Geometry for Four-Axle Whole Vehicle
莊崇賢
Chung-Hsien Chuang
指導教授:劉 霆 博士 Advisor: Tyng Liu, Ph.D.
中華民國 107 年 7 月
July 2018
ii
誌謝
兩年的時間轉眼即逝,隨著論文的完成,求學生涯也在此告一段落。在這兩 年間,最感謝的人即是我的恩師 劉霆老師,不論是在研究上和生活上,老師都 給予了我許多的指導與教誨。在研究上,老師給予我很大的發展空間,不只能讓 我學習規劃自己的研究進度,也培養我獨立思考問題以及尋找解決方法的能力。
當我遇到難題時,老師又總是能耐心地指引我適當的方向,以循循善誘的方式讓 我經歷整個思考的過程,以及找尋思考的重點。研究之外,當我在生活或事務處 理上遭遇困難時,老師也很樂於給予協助與建議,真的非常感謝老師一路上的支 持與教導。
感謝鄭榮和教授與尤正吉教授抽空審閱我的碩士論文,並指出我論文中不完 整之處,提供寶貴的意見,使我的論文更加完善。
感謝所有MMT 實驗室的夥伴們。感謝羿名、博仁、彥菘、先予、昱帆學長 等人在實驗室事務、生活與學術上總是熱心地給予指點與建議,讓我的研究過程 更加順利。感謝上一屆碩班學長禹軒、仁正、資峻、柏安在我碩一修課時,提供 許多課業上的幫助。感謝同屆的同學承楷和宏昇,有你們一同為這兩年的種種事 情奮鬥,使我的碩士生活充滿多采多姿的回憶。感謝世宗、貽淂和怡如,在我們 忙碌於論文時,幫我們處理實驗室的大小事務。另外也感謝工研院的允睿學長在 我研究過程提供了許多的想法和建議,並分享過來人的經驗和心得,讓我對於未 來職場生活有進一步的認識。
最後感謝我的家人在研究過程中給我的鼓勵與支持,讓我得以無後顧之憂地 專心於學業和研究上,順利地完成碩士論文,謹以此文向你們致上最高的謝意。
iv
四軸整車轉向幾何與轉向機構之最佳化設計
莊崇賢
摘要
本研究之目的在於以理想轉向幾何為基準,設計四軸車輛之新型轉向幾何,並 探討此轉向幾何以實際轉向機構實現之可行性,此外,也進一步討論轉向機構模組 化設計之可能性。首先以運動學與牛頓力學建立包含簡化懸吊模型和 Magic Formula 輪胎模型之三自由度四軸車輛穩態轉向模型,再以 Newton-Raphson 數值 方法求得穩態力平衡方程式之解,作為後續分析穩態轉向特性之用。接著根據現行 車輛轉向機構與實車參數,建立最佳化設計方法,以粒子群演算法進行阿克曼轉向 幾何之前雙軸轉向與一二四軸轉向機構設計,證明阿克曼轉向幾何由實際轉向機 構實現之可行性。然後以此為基準,提出雙平行和三平行轉向幾何,將其與阿克曼 轉向幾何比較,推論出可提高四軸車輛機動性且維持良好輪胎磨耗特性的新型轉 向幾何,再以新型轉向幾何為設計目標進行轉向機構設計,並利用四軸車輛穩態轉 向模型分析最佳化結果之穩態轉向特性,以及與現行轉向機構進行比較。最後同樣 以新型轉向幾何為設計目標,進行轉向機構之模組化設計,分析模組化後所能產生 之轉向特性。利用本研究提出之新型轉向幾何與轉向機構之最佳化結果,可對四軸 車輛或是其他多軸車輛的轉向特性與轉向機構改良提供一參考基準。
關鍵字:四軸車輛、轉向機構、多軸轉向、阿克曼轉向幾何、側滑角、粒子群演算 法、最佳化設計
Optimum Design of Steering Mechanism and Steering Geometry for Four-Axle Whole Vehicle
Chung-Hsien Chuang
Abstract
The purpose of this work is to design a new steering geometry of four-axle vehicle based on ideal steering geometry, and study the feasibility to realize the new steering geometry on real steering mechanisms. Besides, this work discusses the possibility of modular design of steering mechanism. First, based on kinematics and Newtonian mechanics, 3-DOF steady-state cornering vehicle models, including the simplified suspension model and Magic Formula tire model, are presented. Then, Newton-Raphson Method is applied to find the numerical solutions of the simultaneous equations of motion.
Afterwards, according to the steering mechanisms and the parameters of existing vehicles, this study constructs an optimization problem and uses particle swarm optimization to design Ackermann front-two steering and 1,2,4th steering mechanisms. The results prove the feasibility of applying Ackermann steering geometry on real steering mechanisms.
After that, the double parallel and triple parallel steering geometry are proposed and compared with Ackermann steering geometry. Based on the comparison, a new steering geometry which can enhance the mobility of four-axle vehicle and maintain well tire wear is proposed. This work takes the new steering geometry as the optimization objective to design steering mechanism, and use the vehicle models to analyze the cornering characteristics of results. Finally, this work also takes the new steering geometry as the optimization objective to design modular steering mechanisms. The results in this research may serve as development and further research of steering mechanisms.
Keywords:Four-axle vehicle, steering mechanism, multi-axle steering, Ackermann
steering geometry, slip angle, particle swarm optimization, optimum designvi
目錄
誌謝 ... iii
摘要 ... iv
Abstract ... v
目錄 ... vi
圖目錄 ... ix
表目錄 ... xiii
符號定義 ... xiv
第一章 緒論 ... 1
1-1 前言 ... 1
1-2 文獻回顧 ... 2
1-3 研究動機與目的 ... 4
1-4 研究方法與步驟 ... 5
1-5 論文架構 ... 6
第二章 理論基礎 ... 7
2-1 車輛座標系定義 ... 7
2-2 輪胎模型 ... 8
2-2-1 輪胎座標系定義 ... 8
2-2-2 輪胎力學 ... 8
2-2-3 轉向力與側滑角 ... 9
2-3 車輛轉向幾何 ... 11
2-4 自行車轉向模型 ... 13
2-5 四軸車輛穩態轉向模型 ... 17
2-5-1 基本假設 ... 17
2-5-2 Magic Formula 輪胎模型 ... 18
2-5-3 簡化懸吊模型 ... 23
2-5-4 車輛運動模型 ... 29
2-5-5 穩態力平衡方程式 ... 32
2-6 四連桿組運動方程式 ... 34
2-6-1 4R 平面四連桿 ... 35
2-6-2 RSSR 空間四連桿 ... 37
2-7 最佳化演算法 ... 39
2-7-1 粒子群演算法 ... 39
2-7-2 改良之粒子群演算法 ... 43
第三章 理想阿克曼轉向幾何之整車轉向機構設計 ... 45
3-1 車輛穩態轉向模型與參數 ... 45
3-2 轉向機構原型 ... 47
3-2-1 一二軸轉向連桿機構 ... 48
3-2-2 一二軸轉向機輸出比 ... 50
3-2-3 設計變數 ... 50
3-3 最佳化設計方法 ... 53
3-3-1 設計目標與最佳化目標函數 ... 53
3-3-2 設計條件與限制 ... 56
3-3-3 演算法參數與設計步驟 ... 57
3-4 前雙軸轉向之轉向機構設計 ... 59
3-4-1 阿克曼轉向幾何設定 ... 59
3-4-2 穩態轉向特性分析與比較 ... 62
3-4-3 最佳化設計結果 ... 68
3-5 一二四軸轉向之轉向機構設計 ... 70
3-5-1 阿克曼轉向幾何設定 ... 71
3-5-2 穩態轉向特性分析與比較 ... 72
3-5-3 第四軸轉向機構原型與設計變數 ... 76
3-5-4 最佳化設計結果 ... 78
3-6 小結 ... 82
第四章 新型多軸轉向幾何與整車轉向機構設計 ... 83
4-1 前雙軸轉向幾何設計 ... 83
4-1-1 雙平行轉向幾何設定 ... 83
4-1-2 雙平行與阿克曼之穩態轉向特性比較 ... 85
4-1-3 雙軸轉向幾何設計 ... 89
4-2 前雙軸轉向之轉向機構設計 ... 90
4-2-1 設計目標修改 ... 90
4-2-2 最佳化設計結果 ... 91
4-2-3 迴轉半徑與偏擺率分析 ... 94
4-2-4 側滑角分析 ... 96
4-3 轉向幾何目標調整 ... 99
4-3-1 新型轉向幾何調整 ... 99
4-3-2 最佳化結果驗證 ... 102
4-4 一二四軸轉向幾何設計 ... 108
4-4-1 三平行轉向幾何設定 ... 108
4-4-2 三平行與阿克曼之穩態轉向特性比較 ... 109
4-4-3 一二四軸轉向幾何設計 ... 113
4-5 一二四軸轉向之轉向機構設計 ... 114
4-5-1 設計目標修改 ... 114
4-5-2 最佳化設計結果 ... 117
viii
4-5-3 迴轉半徑與偏擺率分析 ... 120
4-5-4 側滑角分析 ... 122
4-6 小結 ... 125
第五章 整車轉向機構之模組化設計 ... 129
5-1 轉向機構原型設定與設計變數 ... 129
5-2 前雙軸轉向機構之模組化設計 ... 130
5-2-1 最佳化設計結果 ... 131
5-2-2 迴轉半徑分析 ... 132
5-2-3 側滑角分析 ... 133
5-3 一二四軸轉向機構之模組化設計 ... 136
5-3-1 最佳化設計結果 ... 136
5-3-2 迴轉半徑分析 ... 139
5-3-3 側滑角分析 ... 139
5-4 小結 ... 142
第六章 結論 ... 143
6-1 結論 ... 143
6-2 未來展望 ... 145
參考文獻 ... 146
附件 各最佳化搜尋中適應值最小之 5 組解 ... 150
附錄一 轉向機構最佳化設計程式碼 ... 157
附錄二 四軸車輛穩態轉向模型程式碼 ... 168
圖目錄
圖2.1 SAE 車輛座標系統[2] ... 7
圖2.2 輪胎受力與力矩[3]... 8
圖2.3 輪胎受側向力之 (a) 前視圖 (b) 上視圖[3] ... 10
圖2.4 交叉線層與輻射線層胎之轉向力對側滑角關係[3] ... 11
圖2.5 阿克曼轉向幾何[20]... 12
圖2.6 二軸車輛轉向幾何分類[36] ... 13
圖2.7 不同轉向幾何之內外側輪轉向角關係[3] ... 13
圖2.8 無驅動力之自由體圖[4] ... 14
圖2.9 角度關係[20] ... 15
圖2.10 不同轉向特性之車輛在定圓迴轉時其轉向角與車速之關係[3] ... 16
圖2.11 不同轉向特性之車輛在固定轉向角下迴轉半徑隨車速增加之變化[3] ... 17
圖2.12 MF 曲線[40] ... 19
圖2.13 ISO 輪胎座標系統[42] ... 20
圖2.14 重型卡車輪胎之側向力與側滑角關係圖 ... 21
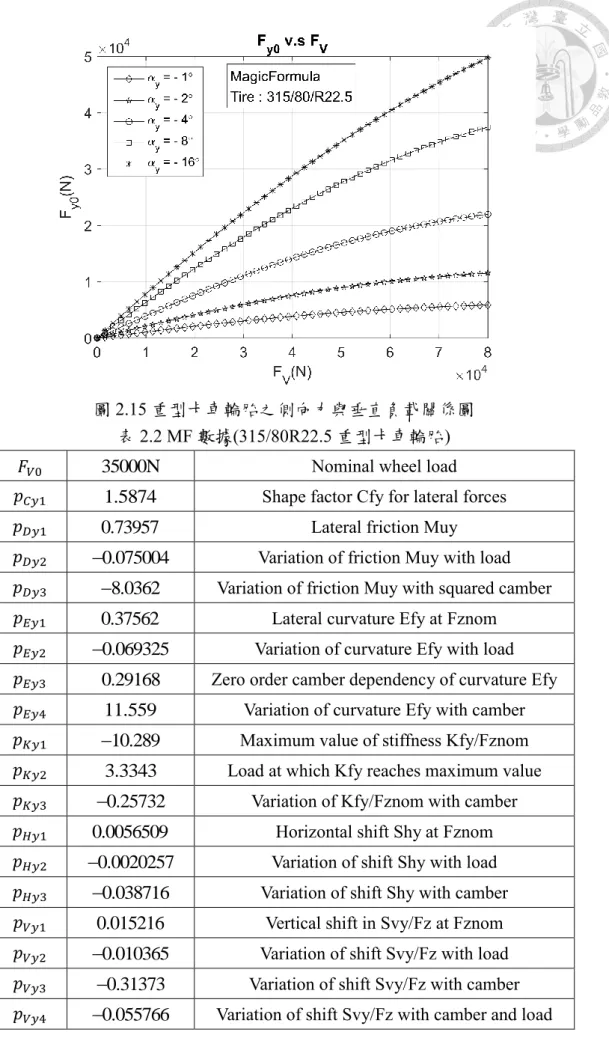
圖2.15 重型卡車輪胎之側向力與垂直負載關係圖 ... 22
圖2.16 懸吊彈簧與車身關係[21] ... 23
圖2.17 位置座標圖[21] ... 24
圖2.18 靜態平衡時車身右視圖[21] ... 25
圖2.19 靜態平衡時車身中心位移[21] ... 25
圖2.20 靜態平衡時車身受力右視圖[21] ... 26
圖2.21 準靜態時之車身中心位移 (a) X 分向 (b)Y 分量 [21] ... 28
圖2.22 準靜態時車身受力圖[21] ... 28
圖2.23 四軸車輛運動模型 (𝑛𝑤ℎ𝑒𝑒𝑙 = 8) [21] ... 30
圖2.24 穩態轉向車速小於正切車速之車身姿態[10] ... 31
圖2.25 穩態轉向車速大於正切車速之車身姿態[10] ... 31
圖2.26 輪胎受力[21] ... 32
圖2.27 輪胎受力對整車之力與力矩(𝑛𝑤ℎ𝑒𝑒𝑙 = 8)[21] ... 33
圖2.28 整車自由體圖 (𝑛𝑤ℎ𝑒𝑒𝑙 = 8)[21] ... 34
圖2.29 四連桿向量圖[45]... 35
圖2.30 RSSR 四連桿座標系與參數[45] ... 37
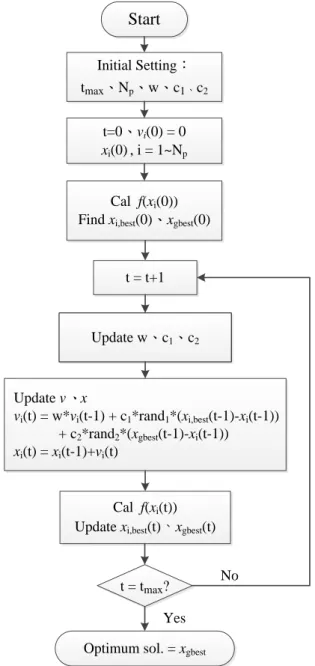
圖2.31 PSO 運算流程圖 ... 42
圖2.32 PSO-TVAC 運算流程圖 ... 44
圖3.1 四軸車輛車身規格標示 ... 46
圖3.2 懸吊彈簧形變量與彈力關係 ... 47
圖3.3 四軸車輛輪胎編號 ... 47
圖3.4 第一軸轉向機構簡化圖 ... 48
x
圖3.5 第二軸轉向機構簡化圖 ... 48
圖3.6 第一軸轉向機構桿件命名 ... 49
圖3.7 第二軸轉向機構桿件命名 ... 49
圖3.8 第一軸轉向機構設計變數 ... 51
圖3.9 第二軸轉向機構設計變數 ... 51
圖3.10 阿克曼轉向幾何交於第 3 軸之第二、第三和第四輪轉向角 ... 54
圖3.11 任意轉向幾何與阿克曼轉向幾何之誤差表示 ... 55
圖3.12 本研究使用之 PSO-TVAC 演算流程 ... 58
圖3.13 前雙軸轉向之阿克曼交於第 3 軸 ... 60
圖3.14 前雙軸轉向之阿克曼交於第 3.5 軸 ... 60
圖3.15 前雙軸轉向之阿克曼交於第 4 軸 ... 61
圖3.16 輪軸線交於不同軸之前雙軸轉向四軸車輛定速迴轉半徑 ... 62
圖3.17 輪軸線交於不同軸之迴轉半徑隨車速增加的變化(𝑅𝐼 = 9𝑚) ... 63
圖3.18 輪軸線交於不同軸之前雙軸轉向四軸車輛之第二輪迴轉半徑比較 ... 64
圖3.19 輪軸線交於不同軸之各輪側滑角隨第一輪轉向角增加之變化(V=10kph) . 65 圖3.20 輪軸線交於不同軸之側滑角絕對值平均之變化 ... 66
圖3.21 輪軸線交於不同軸之側滑角變異係數隨車速增加之變化 ... 67
圖3.22 前雙軸阿克曼之轉向機構 ... 69
圖3.23 前雙軸轉向機構最佳化結果之轉向幾何與阿克曼轉向幾何比較 ... 70
圖3.24 一二四軸轉向之阿克曼交於第 3 軸 ... 71
圖3.25 阿克曼轉向幾何交於第 3 軸之第七和第八輪轉向角 ... 72
圖3.26 阿克曼轉向幾何下前雙軸與一二四軸轉向之迴轉半徑比較 ... 73
圖3.27 前雙軸與一二四軸轉向之各輪側滑角變化(V=10kph) ... 74
圖3.28 前雙軸與一二四軸轉向之側滑角絕對值平均之變化(V=10kph) ... 75
圖3.29 前雙軸與一二四軸轉向之側滑角絕對值平均隨車速增加之變化(𝑅𝐼 = 20𝑚) ... 75
圖3.30 前雙軸與一二四軸轉向之側滑角變異係數隨車速增加之變化(𝑅𝐼 = 20𝑚) 76 圖3.31 第四軸轉向機構桿件命名與設計變數 ... 77
圖3.32 一二四軸阿克曼之轉向機構 ... 80
圖3.33 一二四軸轉向機構最佳化結果之轉向幾何與阿克曼轉向幾何比較 ... 81
圖4.1 前雙軸轉向之雙平行交於第 3.5 軸 ... 84
圖4.2 雙平行轉向幾何交於第 3.5 軸之第二、第三和第四輪轉向角 ... 84
圖4.3 阿克曼與雙平行轉向幾何下前雙軸轉向四軸車輛之定速迴轉半徑 ... 85
圖4.4 阿克曼與雙平行轉向幾何下迴轉半徑隨車速增加之變化(𝑅𝐼 = 9𝑚) ... 86
圖4.5 阿克曼與雙平行轉向幾何之各輪側滑角變化(V=10kph) ... 87
圖4.6 阿克曼與雙平行轉向幾何之側滑角絕對值平均之變化 ... 88
圖4.7 阿克曼與雙平行轉向幾何之側滑角變異係數變化(V=10kph) ... 89
圖4.8 阿克曼與雙平行轉向幾何之側滑角變異係數隨車速增加之變化 ... 89
圖4.9 新型轉向幾何之轉向角目標 ... 91
圖4.10 前雙軸新型轉向幾何之轉向機構 ... 92
圖4.11 以新型轉向幾何為目標所設計的前雙軸轉向機構之各輪轉向角 ... 93
圖4.12 前雙軸轉向機構最佳化結果之迴轉半徑 ... 94
圖4.13 前雙軸轉向機構最佳化結果之偏擺率隨方向盤轉角增加之變化(V=10kph) ... 95
圖4.14 前雙軸轉向機構最佳化結果之單位偏擺率變化量隨方向盤轉角增加之變 化(V=10kph) ... 95
圖4.15 前雙軸轉向機構最佳化結果之各輪側滑角變化(V=10kph) ... 97
圖4.16 前雙軸轉向機構最佳化結果之側滑角絕對值平均之變化(V=10kph) ... 98
圖4.17 前雙軸轉向機構最佳化結果之側滑角變異係數之變化(V=10kph) ... 98
圖4.18 大轉向角時線性變化之新型轉向幾何的第二輪轉向角目標 ... 100
圖4.19 轉向角之三個取點 ... 101
圖4.20 大轉向角時二次函數變化之新型轉向幾何的第二輪轉向角目標 ... 102
圖4.21 以兩種變化為目標所設計的前雙軸轉向機構之第二輪轉向角 ... 104
圖4.22 以兩種變化為目標所設計的前雙軸轉向機構之第三輪轉向角 ... 105
圖4.23 以兩種變化為目標所設計的前雙軸轉向機構之第四輪轉向角 ... 106
圖4.24 兩種幾何調整與 4-2 節之最佳化結果的迴轉半徑比較(V=10kph) ... 107
圖4.25 兩種幾何調整與 4-2 節之最佳化結果的側滑角絕對值平均比較(V=10kph) ... 107
圖4.26 一二四軸轉向之三平行交於第 3 軸 ... 108
圖4.27 三平行轉向幾何交於第 3 軸之第二、第三、第四、第七和第八輪轉向角 ... 109
圖4.28 阿克曼與三平行轉向幾何下四軸車輛之迴轉半徑比較(V=10kph) ... 110
圖4.29 阿克曼與三平行轉向幾何下四軸車輛之各輪側滑角比較(V=10kph) ... 111
圖4.30 阿克曼與三平行轉向幾何下四軸車輛之側滑角絕對值平均比較 ... 112
圖4.31 阿克曼與三平行轉向幾何下四軸車輛之側滑角變異係數比較(V=10kph)112 圖4.32 阿克曼與三平行轉向幾何之側滑角變異係數隨車速增加之變化(𝑅𝐼=20m) ... 113
圖4.33 相同第一輪轉向角下兩種轉向幾何之角度差值示意圖 ... 115
圖4.34 一二四軸新型轉向幾何之轉向角目標 ... 116
圖4.35 一二四軸新型轉向幾何之轉向機構 ... 118
圖4.36 一二四軸轉向機構最佳化結果之轉向幾何與設計目標比較 ... 119
圖4.37 一二四軸轉向機構最佳化結果之迴轉半徑(V=10kph) ... 120
圖4.38 一二四軸轉向機構最佳化結果之偏擺率隨方向盤轉角增加之變化 (V=10kph) ... 121
圖4.39 一二四軸轉向機構最佳化結果之單位偏擺率變化隨方向盤轉角增加之變 化(V=10kph) ... 121
xii
圖4.40 一二四軸轉向機構最佳化結果之各輪側滑角變化(V=10kph) ... 123
圖4.41 一二四軸轉向機構最佳化結果之側滑角絕對值平均之變化 ... 124
圖4.42 一二四軸轉向機構最佳化結果之側滑角變異係數之變化 ... 124
圖4.43 現行轉向機構下四軸車輛之迴轉半徑 ... 125
圖4.44 現行轉向機構下四軸車輛之側滑角絕對值平均 ... 126
圖4.45 現行轉向機構下四軸車輛之側滑角變異係數 ... 126
圖5.1 前雙軸模組化設計之轉向機構 ... 131
圖5.2 前雙軸轉向機構模組化設計結果之轉向幾何與設計目標比較 ... 132
圖5.3 前雙軸轉向機構模組化設計結果之迴轉半徑變化(V=10kph) ... 133
圖5.4 前雙軸轉向機構模組化設計結果之各輪側滑角變化(V=10kph) ... 134
圖5.5 前雙軸轉向機構模組化設計結果之側滑角絕對值平均之變化(V=10kph) 135 圖5.6 前雙軸轉向機構模組化設計結果之側滑角變異係數之變化(V=10kph) .... 135
圖5.7 一二四軸模組化設計之轉向機構 ... 137
圖5.8 一二四軸轉向機構模組化設計之轉向幾何與設計目標比較 ... 138
圖5.9 一二四軸轉向機構模組化設計結果之迴轉半徑變化(V=10kph) ... 139
圖5.10 一二四軸轉向機構模組化設計結果之各輪側滑角變化(V=10kph) ... 140
圖5.11 一二四軸轉向機構模組化設計結果之側滑角絕對值平均之變化(V=10kph) ... 141
圖5.12 一二四軸轉向機構模組化設計結果之側滑角變異係數之變化(V=10kph) ... 141
表目錄
表2.1MF 之參數定義[40] ... 19
表2.2MF 數據(315/80R22.5 重型卡車輪胎) ... 22
表3.1 四軸車輛車身規格參數 ... 46
表3.2 實車轉向機構參數 ... 51
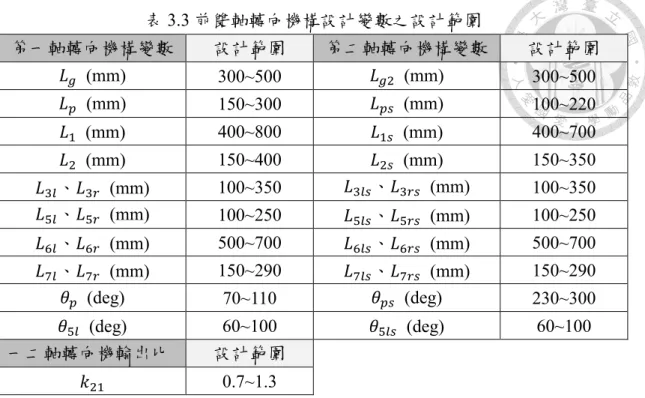
表3.3 前雙軸轉向機構設計變數之設計範圍 ... 52
表3.4 一二軸接地點座標定義 ... 52
表3.5PSO-TVAC 演算法參數 ... 57
表3.6 阿克曼轉向幾何之前雙軸轉向機構最佳化結果 ... 69
表3.7 第四軸接地點座標定義 ... 77
表3.8 第四軸轉向機構設計變數之設計範圍 ... 77
表3.9 阿克曼轉向幾何之一二四軸轉向機構最佳化結果 ... 79
表4.1 新型轉向幾何之前雙軸轉向機構最佳化結果 ... 92
表4.2 大轉向角時線性變化之前雙軸轉向機構最佳化結果 ... 102
表4.3 大轉向角時二次函數變化之前雙軸轉向機構最佳化結果 ... 103
表4.4 一二四軸新型轉向幾何之一二四軸轉向機構最佳化結果 ... 117
表5.1 前雙軸轉向機構模組化設計之設計變數範圍 ... 130
表5.2 一二四軸轉向機構模組化設計之設計變數範圍 ... 130
表5.3 前雙軸轉向機構模組化設計之最佳化結果 ... 131
表5.4 一二四軸轉向機構模組化設計之最佳化結果 ... 137
xiv
符號定義
(𝑥, 𝑦, 𝑧) 車輛座標系 (𝑥′, 𝑦′, 𝑧′) 輪胎座標系 (X, Y, Z) 車軸座標系 (𝑡, 𝑛) 車輛運動座標系 (𝑥𝐺, 𝑦𝐺) 重心座標
(𝑥𝐶, 𝑦𝐶) 瞬心座標 (𝑥𝑂, 𝑦𝑂) 車身中心座標 (𝑥𝑖, 𝑦𝑖) 第𝑖輪中心座標 𝑎𝑥 車身縱向加速度 𝑎𝑦 車身側向加速度
𝐵 輪距
𝑐1 個體性加速係數 𝑐2 社會性加速係數
𝑐𝑣 輪胎側滑角量值變異係數
𝐶𝐹 合力中心
𝐶𝐺 車身重心
𝐶𝑇 車輛轉向運動之理想轉向中心
𝐶𝑂 車身中心
𝐶𝛼 輪胎轉向剛性
𝐶𝛼𝑓 前輪轉向剛性 𝐶𝛼𝑟 後輪轉向剛性
𝑑 彈簧接點和身中心垂直距離
𝑑𝑖
⃑⃑⃑ 第𝑖輪中心相對於重心之位置向量
𝑑𝑓 輪胎偏移
𝑓𝑟𝑡 重型卡車輻射線層胎之滾阻係數 𝐹𝑉𝑖 第𝑖輪垂直力 (正向負載)
𝐹𝑥′ 輪胎縱向力 𝐹𝑥′𝑓 前輪驅動力 𝐹𝑥′𝑖 第𝑖輪驅動力 𝐹𝑥′𝑟 後輪驅動力 𝐹𝑦′ 輪胎側向力 𝐹𝑦′𝑓 前輪側向力 𝐹𝑦′𝑖 第𝑖輪側向力 𝐹𝑦′𝑟 後輪側向力 𝐹𝑦′𝛼 輪胎轉向力 𝐹𝑦′𝛾 輪胎側傾力 𝐹𝑧′ 輪胎正向力 𝐹𝑧′𝑖 第𝑖輪正向力 𝐹𝑑 拖滯力 𝐹𝑛 向心力
𝐹𝑟 輪胎滾動阻力
𝐹𝑠 側向力
∑ 𝐹
整車合力𝑔 重力加速度
ℎ 車身重心離地高度
ℎ𝐺 車身重心離車軸平面高度 ℎ(𝛿) 懲罰函數
𝐼𝐶 車輛轉向運動之瞬時中心
𝑘 彈簧剛性
xvi
𝑘𝑖 第𝑖軸轉向機輸出比 𝑘𝑗𝑘 𝑘𝑗軸轉向機輸出比 𝐾𝑢𝑠 轉向不足係數
𝐿 軸距
𝐿𝑓 前軸至重心距離 𝐿𝑗𝑘 第
j
軸與第k
軸距離 𝐿𝑟 後軸至重心距離𝐿𝑠 彈簧原長
𝑚 車身質量
𝑀𝑥′ 傾覆力矩
𝑀𝐺 繞重心之偏擺合力矩 𝑀𝑦′ 滾動摩擦力矩
𝑀𝑧′ 回正力矩
𝑛𝑤ℎ𝑒𝑒𝑙 輪胎數目
𝑂 車軸平面中心
𝑂′ 輪胎座標系原點 𝑃𝑖 第
i
輪中心𝐑 旋轉矩陣
𝑅𝐺 重心迴轉半徑
𝑅𝐼 理想迴轉半徑
𝑅𝑂 真實迴轉半徑
𝑡𝑝 氣胎曳距
𝑇𝐼 內側輪軸心延伸線交點 𝑇𝑂 外側輪軸心延伸線交點 𝑣𝑖 第𝑖個粒子的移動速度
𝑉 車速
𝑉𝑡 正切車速
𝑤 慣性權重
𝑊 車身重量
𝑊𝑓 前輪靜態正向負載 𝑊𝑟 後輪靜態正向負載
𝛼 輪胎側滑角
𝛼𝑓 前輪側滑角 𝛼𝑖 第
i
輪側滑角 𝛼𝑟 後輪側滑角𝛽 車身側滑角
𝛾 輪胎外傾角
𝛿𝑓 前輪轉向角 𝛿𝑖 第𝑖輪轉向角
𝛿𝐼 內側輪轉向角
𝛿𝑂 外側輪轉向角
𝛿𝑝 畢特門臂轉角
𝛿𝑠 方向盤轉角
𝜃𝑖 第𝑖輪運動方向與車身縱向夾角
𝜇 輪胎側滑角量值平均
𝜎 輪胎側滑角量值標準差
𝜙 車身側傾角
𝜑 車身俯仰角
Ω 偏擺率
1
第一章 緒論 1-1 前言
車輛的所有元件中唯一與地面接觸的元件為輪胎,其與路面的接觸力扮演著 使車輛在行駛中能夠改變方向的重要角色。當駕駛者轉動方向盤,帶動轉向機構,
進而將運動傳遞到車輪,使得車輪與車身縱向形成夾角,此時車輪與路面間產生之 側向力將提供車輛轉彎所需之向心力,並使得車身也隨著車輛前進而偏離原行進 方向,達到轉向的目的。
一般常見之雙軸車輛多為前軸轉向,只有少數車輛同時具有後軸輔助轉向的 功能,稱為四輪轉向[1]。多軸車輛的話,如大型貨車、吊車和軍用載具等等,其轉 向軸數則有較多之變化,包含雙軸轉向、三軸轉向、四軸轉向等等,依據不同的軸 數和行駛需求會有相異的轉向設計。在軍用載具方面,由於高機動性、輕量化與操 控便利性的需求,再加上現代戰場環境涵蓋許多舖設柏油路面之地區,輪型車輛因 此逐漸成為各國之主流研發項目,四軸裝甲車即是其中一種。四軸裝甲車之尺寸與 重量大於一般車輛,為了達到較好之轉向特性,一般會有數量大於一軸的轉向軸,
常見的設計包括前雙軸轉向、四軸轉向,以及前雙軸搭配第四軸輔助轉向。
不論是雙軸還是多軸車輛,其轉向機構之設計大多依循阿克曼轉向幾何 (Ackerman steering geometry)。在此轉向幾何下,車輛轉向時的各輪胎轉向角關係 是以輪軸中心延伸線交於一點來設定,應能使輪胎磨耗降到最低。然而,對於軍用 四軸車輛來說,受限於車身尺寸和轉向軸數等因素,其各輪轉向角未必能遵循阿克 曼轉向幾何,而且,即使能遵循阿克曼轉向幾何,也未必能提高機動性,因此,對 於探討多軸轉向幾何對車輛轉向特性之影響,以及將轉向幾何應用於實際轉向機 構之研究即有其需要。本研究即是藉由分析四軸車輛在不同轉向幾何下之轉向特 性,推論出可以符合實際需求之轉向幾何,並且以現行車輛上的轉向機構為原型,
進行轉向機構之設計,探討阿克曼與新型轉向幾何在實際應用上的可行性。
1-2 文獻回顧
根據車輛相關書籍[2-4]可以得知,在研究車輛轉向行為時,常會以簡化的二自 由度自行車轉向模型來分析。其分析方法大致可分為兩類:Gillespie[2]、Wong[3]、
Dixon[4]以穩態力平衡的觀點來推導側向力之數學式,並且代入輪胎轉向角與側滑 角的幾何關係,建立車輛穩態轉向之統御方程式。藉由此方程式進一步分析歸納出 車輛穩態轉向特性;Milliken[5]與 Abe[6]則根據牛頓力學理論建立車輛轉向運動之 微分方程式,藉此得到車輛暫態響應,同時也探討加入驅動力與剎車力後響應的變 化情況。
除了上述之外,對於二軸車輛轉向行為之探討也已有許多相關研究,Nalecz 與 Bindemann[7, 8]考量懸吊幾何變化(suspension kinematics)與側向負載轉移(lateral weight transfer)等效應之影響,以三自由度之四輪車輛模型探討 4WS 車輛在高速行 駛的動態響應與穩定性。Itoh 與 Oida[9]使用三自由度之四輪車輛模型分析4 × 4 × 4農用曳引機在一般路面的轉向行為,探討車速、輪胎轉向角、車重配置與路面摩 擦係數對車身側滑角和偏擺率之影響。簡志鴻[10]考量各輪胎側滑角,利用數值方 法建立具有驅動力和無驅動力的三自由度4WS 車輛模型,並以此模型分析不同轉 向設定下之穩態轉向行為。陳昱達[11]參考簡志鴻[10]之車輛模型,進一步考量正 向負載轉移效應,探討單後輪與雙後輪轉向對於 4WS 車輛穩態轉向行為之影響。
關於多軸車輛轉向行為之研究,Ellie[12]在小轉向角之假設下,以幾何關係發 展二軸與三軸車輛的穩態轉向模型,並且探討輪胎的磨耗現象與能量耗損的關係。
Winkler 與 Aurell[13, 14] 以簡化自行車模型分析多軸車輛之穩態轉 向特性。
Watanabe 等人[15]採用 brush 輪胎模型計算側向力,以牛頓力學建立多軸車輛穩態 轉向模型,輔以實車測試作驗證,探討多軸車輛之轉向設定與驅動輪扭力分配之關 係。Silva 等人[16]使用簡化自行車模型發展前雙軸轉向之四軸車輛穩態轉向模型,
並推導量化公式來分析輪胎磨耗。Nell[17]同樣以簡化自行車模型發展全輪轉向之 三軸車輛穩態轉向模型,考量真實轉向機構中轉向軸之間的比率,建立標準實驗流
3
程來進行全輪轉向原理與效果之驗證。蔡榮暉[18]建立等效四輪車數學模型來模擬 八輪甲車之穩態轉向特性,並且利用ADAMS 建立車輛模型進行驗證。黃昱儒[19]
使用 Winkler[14]研究中的輪胎模型計算側向力,並且簡化正向負載轉移之計算,
建立四軸車輛轉向模型以分析阿克曼轉向幾何下車輛轉向行為。楊明憲[20]參考黃 昱儒[19]之車輛模型,改採用 Magic Formula 輪胎模型以及改良正向負載轉移計算 方式,以Newton-Raphson 數值方法發展三自由度八輪車輛穩態轉向模型,並以此 模型分析非阿克曼轉向幾何下八輪車輛之穩態轉向特性。魯士強[21]進一步發展楊 明憲[20]之研究,建立三自由度多軸車輛穩態轉向模型,分析二軸、三軸和四軸車 輛之穩態轉向特性,並探討第四軸輔助轉向設定對於四軸車輛轉向特性之影響。
前述研究大多沒有討論實際轉向機構之設計,以下為關於車輛轉向機構研究 的部分,Ansarey 等人[22]考慮轉向時的操縱性,以基因演算法最佳化設計二軸車 輛的轉向連桿機構。Hanzaki 等人[23]分析一包含齒條和齒輪之六連桿轉向機構,
並以 ADAMS 為輔助,設計其尺寸以達到阿克曼轉向幾何。Singh Gautam 和 Awadhiya[24]提出一改良之六連桿阿克曼轉向機構,並與其他現有轉向機構比較桿 件之運動特性,提供一車輛轉向機構之選擇。Simionescu 與 Beale[25]研究平面四 桿機構之設計,提出一種新基準來定義目標方程式,並以阿克曼轉向機構為範例進 行設計。Chaudhuri 等人[26]以聯結車為對象,探討其多軸轉向機構之設計。Qin 等 人[27]考慮了動態負載的影響,以分級制度之最佳化程序(hierarchical optimization procedure)設計三軸車輛之雙軸轉向機構。Chen 等人[28]依據現行四軸車輛之車身 規格與轉向機構,設計前雙軸之阿克曼轉向機構,並且依據車輛轉向特性,進一步 以最小迴轉半徑的優化為目標進行轉向機構設計。
另外,在進行連桿機構尺寸設計時,常會以最佳化演算法來求解,Cabrera 等 人[29]以演化算法為基礎,提出一最佳化方法對四連桿機構進行設計,並和基因演 算法等最佳化方法比較。Shinde 等人[30]以基因演算法設計一六連桿機構之尺寸,
使其運動時能達到特定軌跡。McDougall 與 Nokleby[31]取數個點作為桿件運動之
目標路徑點,以粒子群演算法設計四連桿機構之尺寸,使四連桿運動盡可能通過所 有路徑點。Alinia 等人[32]以粒子群演算法為基礎發展一新方法,用於四連桿機構 之合成,並以三個範例呈現其方法之特點。Lee 等人[33]提出一種混合式粒子群演 算法,將其應用於四連桿機構設計,並以四種軌跡為設計目標(goal of design),比 較基因演算法、粒子群演算法和混合式粒子群演算法之優劣。
綜合上述之文獻可以得知:
1. 車輛模型的建立可分為穩態與暫態兩大類,穩態車輛模型可用於分析車輛轉 向特性,暫態模型則用於分析車輛行駛狀態隨時間之變化。
2. 二軸車輛之轉向機構設計已有許多相關研究。
3. 研究多軸車輛之轉向機構的文獻較少,而且也較少研究對整車多軸轉向機構 進行設計。
4. 針對轉向機構之研究大多以阿克曼轉向幾何為設計目標,較少探討其他轉向 幾何在轉向機構上之應用。
5. 已有不少研究以基因演算法、粒子群演算法等現代最佳化演算法進行連桿機 構之設計。
1-3 研究動機與目的
隨著文明的發展,城市地區越來越多,軍用車輛需要行駛在城市道路上的機會 也跟著增加,因此,勢必得提高機動性,如此才能順利地在轉向空間較小或是轉彎 角度較大之路段行駛。
現行的軍用四軸車輛一般具有前雙軸轉向之功能,若要改良機動性,縮小其 所能達到之最小迴轉半徑的話,可行的方法包含改變轉向幾何與增加轉向軸數。
轉向幾何對於轉向特性的影響需要藉由適當的模擬分析來確定是否有益於改良機 動性,而且分析後所採用的轉向幾何也必須考量其在實際機構上應用的可能性,如 此才能證明其實用價值。此外,在設計轉向幾何時,輪胎的磨耗程度也是重要的考 量因素,故不能單以縮小迴轉半徑為目標。增加轉向軸數的考量點也相同,若要增
5
加第四軸輔助轉向,轉向幾何之挑選以及實際轉向機構應用之可行性,都是改良車 輛機動性時所必須注意的。
因此,本研究藉由分析不同轉向幾何與轉向軸數設定下之穩態轉向特性,比較 不同轉向幾何之優缺點,並以此為依據設計一新型轉向幾何,接著再以最佳化方法 設計轉向機構的尺寸規格,使其盡可能實現理想轉向幾何與新型轉向幾何,藉此探 討可行性,以及證明設計之轉向機構的轉向幾何是否優於一般理想轉向幾何,達到 改良機動性的目的。除此之外,考慮到機構維修之便利性,如果每一軸轉向機構的 尺寸規格都相同,在維修上就只需要準備一種尺寸規格之轉向機構,故本研究也探 討在此情況下,實際機構是否也能實現新型轉向幾何,期望在改良機動性的同時,
也顧及維修之便利性。
1-4 研究方法與步驟
本研究主要分為兩個階段,第一階段首先分析現行四軸車輛使用之轉向機構 的運動方式,利用平面四連桿與 RSSR 四連桿運動方程式計算整組轉向機構的輸 入桿與輸出桿的角度關係,如此便可得知角度由畢特門臂輸入並經過機構的傳動 後各個輪胎的轉動角度,然後依據此組轉向機構與實車之規格,訂立最佳化設計方 法,包含設計目標、目標函數、設計變數、設計條件和設計步驟,並且選定用來設 計轉向機構尺寸規格之最佳化演算法。最後將阿克曼轉向幾何訂為設計目標,分別 對四軸車輛之前雙軸轉向機構和一二四軸轉向機構進行設計,探討阿克曼轉向幾 何實際應用之可行性,用以作為新型轉向幾何設計的基準。
第二階段提出一種四軸車輛的雙平行轉向幾何,以四軸車輛穩態轉向模型模 擬阿克曼轉向幾何與此轉向幾何下的四軸車輛轉向特性,比較兩者在不同穩態轉 向情形下的重心迴轉半徑與側滑角,藉此探討兩種轉向幾何對於車輛機動性與輪 胎磨耗影響之優劣,並推論出一新型轉向幾何,然後以新型轉向幾何為設計目標,
進行前雙軸轉向機構設計。有了最佳化結果後,根據輪胎轉向角變化,調整新型轉 向幾何之設定,以轉向機構設計作為驗證,使其更符合實際轉向機構所能達到之轉
向幾何。接著,同樣針對一二四軸轉向四軸車輛提出三平行轉向幾何,將其與阿克 曼轉向幾何比較,並根據調整後之新型轉向幾何訂立一二四軸新型轉向幾何,然後 以此為設計目標設計轉向機構,以及分析所設計機構之轉向幾何,探討此轉向幾何 下四軸車輛穩態轉向特性是否達到預期,並與現行四軸車輛之轉向機構比較。最後,
根據新型轉向幾何應用於實際機構上之結果,同樣以新型轉向幾何為設計目標,設 計模組化之轉向機構,分析在各軸轉向機構皆相同的情況下新型轉向幾何應用於 實際機構的可能性。
1-5 論文架構
本文共分為六個部分,第一章簡介本研究之動機、研究目的與方法。第二章介紹 本研究所使用之相關理論,首先定義車輛和輪胎之參考座標系,以及概述輪胎力學與 車輛轉向幾何,接著依序說明自行車轉向模型與四軸車輛穩態轉向模型,最後解說四 連桿機構運動方程式與最佳化演算法之理論。第三章以理想阿克曼轉向幾何為基準目 標,分析前雙軸轉向與一二四軸轉向之轉向特性,並以最佳化方法設計轉向機構尺寸,
探討阿克曼轉向幾何之可行性。第四章比較平行與阿克曼轉向幾何在穩態轉向特性上 之優劣,同樣對前雙軸轉向與一二四軸轉向都進行分析,依據比較結果與改良目標設 計一新型轉向幾何,並且以最佳化方法設計轉向機構尺寸,探討新型轉向幾何之可行 性,最後分析最佳化轉向機構之轉向幾何與其所造成之轉向特性,並與現行機構比較。
第五章考慮轉向機構維修之便利性,在所有轉向軸之轉向機構皆相同的條件下,以前 一章節之新型轉向幾何為目標,進行機構尺寸規格設計,並討論其實際應用的可能性。
第六章作為最後總結,統整本研究之成果與貢獻,並列出未來以此研究為基礎所能進 一步發展之方向。
7
第二章 理論基礎
本章節將介紹本研究應用到的理論。首先定義車輛與輪胎之座標系統,並說 明輪胎力學原理,以及輪胎特性與車輛轉向之關係,然後介紹車輛的轉向幾何定 義。後半部分以簡化之自行車模型介紹基本轉向特性,並且進一步說明四軸車輛 轉向模型的建立,然後介紹兩種四連桿機構的運動方程式計算方法,最後為最佳 化演算法之理論說明。
2-1 車輛座標系定義
一般車輛行駛主要會有前進、後退和轉彎,共三種情況。本研究依照SAE (the Society of Automotive Engineers) 所制定的車輛座標軸系統,參考 Gillespie[2],將 車輛之運動型態定義為六個自由度,由三個平移與三個轉動自由度組成,如圖2.1 所示。
圖2.1 SAE 車輛座標系統[2]
x : 車輛縱向 (longitudinal) 的運動,定義車輛前方為正。
y : 車輛側向 (lateral) 的運動,定義向車輛右方為正。
z : 車輛垂直 (vertical) 方向的運動,定義向車輛下方為正。
p : 車輛繞 x 軸的側傾 (roll) 運動。
q : 車輛繞 y 軸的俯仰 (pitch) 運動。
r : 車輛繞 z 軸的偏擺 (yaw) 運動。
2-2 輪胎模型
輪胎是所有車輛元件中唯一與地面接觸且受力的部分,在車輛穩定行駛時,行 駛速度、車輛的負載、車輪定位以及路面狀況等等都是影響輪胎力學特性的因素,
綜合所有因素而產生的力與力矩,作用於輪胎與地面的接觸面上,對車輛之運動特 性有著極大的影響。本章節將介紹輪胎的力學模型與相關性質,藉此說明輪胎與車 輛運動的關聯性。
2-2-1 輪胎座標系定義
為了使輪胎力學特性的描述更加明確,本小節將定義輪胎的座標系統。參考 Wong[3],以 SAE 所制定的輪胎座標系統作為本研究的輪胎座標系。
1. 座標原點𝑂′ : 輪胎與地面的接觸中心。
2. 𝑥′軸方向 : 輪胎滾動方向,定義向前為正。
3. 𝑦′軸方向 : 輪胎側滑方向,定義向右為正。
4. 𝑧′軸方向 : 輪胎上下垂直移動方向,定義向下為正。
2-2-2 輪胎力學
一般橡膠輪胎會受到數個方向的力與力矩,本小節將依照前一小節所定義的 座標系介紹所有力與力矩的成因以及輪胎的受力狀態,參考Wong[3],如圖 2.2 所 示。
圖2.2 輪胎受力與力矩[3]
9
1. 縱向力 (longitudinal force) 𝐹𝑥′ ∶ 路面在𝑥′方向施加於輪胎的作用力,是由輪胎 縱向滑動 (longitudinal slip) 造成的。縱向力包括驅動力 (tractive force)、滾動 阻力 (rolling resistance force)、剎車力 (braking force),主要影響車輛行駛的加 減速。
2. 側向力 (lateral force) 𝐹𝑦′ ∶ 路面在𝑦′方向施加於輪胎的作用力,是由輪胎側向 滑動 (lateral slip) 或側傾 (camber)所造成,前者產生轉向力 (cornering force),
後者則形成側傾力 (camber force),為車輛轉向所需之向心力的來源。
3. 正向力 (normal force) 𝐹𝑧′ ∶ 路面在𝑧′方向施加於輪胎的作用力,主要來源為輪 胎的正向負載 (normal load)。
4. 傾覆力矩 (overturning moment) 𝑀𝑥′ ∶ 此為𝑥′軸方向的力矩,由地面作用在輪 胎的正向力與輪胎的正向負載彼此間不共線所造成。
5. 滾動摩擦力矩 (rolling resistance moment) 𝑀𝑦′ ∶ 此為 y′軸方向的力矩,由輪胎 形變而產生的黏滯效應 (tire hysteresis properties) 所造成,使得輪胎在滾動過程 中發生能量損耗。
6. 回正力矩 (aligning moment) 𝑀𝑧′ ∶ 此為𝑧′軸方向的力矩,由車輛過彎或側傾時,
縱向力和側向力作用於輪胎與地面之接觸面所造成的。
2-2-3 轉向力與側滑角
若施加一側向力 (side force) 𝐹𝑠在滾動之橡膠輪胎上,為了達到y′方向的力平 衡,會因此產生一方向相反之側向力 𝐹𝑦′𝛼,作用於輪胎與地面的接觸面上,如圖 2.3(a),使得輪胎無法沿著滾動方向前進,而是沿著與滾動方向夾α角度的方向前進,
如圖2.3(b)中的𝑂⃑⃑⃑⃑⃑⃑⃑ 方向,根據 SAE 的定義,圖中之α角度為負值。產生於輪胎與′𝐴 地面之接觸面上的側向力 𝐹𝑦′𝛼 定義為轉向力 (cornering force),輪胎滾動方向與 前進方向之夾角α則定義為側滑角 (slip angle)。
圖2.3 輪胎受側向力之 (a) 前視圖 (b) 上視圖[3]
一般而言,轉向力 𝐹𝑦′𝛼與側向力 𝐹𝑠之作用不會在同一線上,當側滑角角度較 小時,轉向力 𝐹𝑦′𝛼的施力位置會落在距離側向力 𝐹𝑠後方 𝑡𝑝遠的地方,此距離 𝑡𝑝 稱為氣胎曳距(pneumatic trail)。由於兩力作用位置之差距,使得一對輪胎作用的力 矩(torque)或力偶(couple)產生,此力矩具有將輪胎往運動方向轉動的趨勢,為一種 回正力矩[3]。
常見的側滑角與轉向力之關係如圖2.4 所示,在側滑角小於 4 度時,側滑角與 轉向力幾乎呈線性關係,超過4 度後,轉向力隨側滑角變大而增加的趨勢減少,進 入飽和區[34],即使側滑角繼續增大,轉向力也無法超過輪胎與路面的附著極限。
雖然整體趨勢類似,但是根據輪胎種類不同,側滑角與轉向力的關係也有所差 異,如圖2.4 中交叉線層胎(bias-ply tire)與輻射線層胎(radial tire)的曲線,由圖可看 出,在同樣側滑角的狀況下,輻射線層胎可提供的轉向力比較大。另外,不同種類 的輪胎,其產生最大轉向力的側滑角也有所不同,一般小客車輪胎的最大轉向力會 出現在側滑角約18 度的時候,賽車用輪胎則是出現在側滑角約 6 度的狀況[3]。
各類型輪胎的轉向特性差異,通常採用轉向剛性(cornering stiffness) 𝐶𝛼作為比 較指標,其定義為轉向力 𝐹𝑦′𝛼對側滑角α的導數,如式(2.1)所示。轉向剛性會受多 項因素影響,包括輪胎尺寸規格、材質、胎壓、正向負載、驅動力、剎車力、地面 摩擦係數等等[3]。
11
𝐹𝑦′𝛼 = 𝐶𝛼𝛼, 𝐶𝛼= −𝜕𝐹𝑦′𝛼
𝜕α |
𝛼=0
(2.1) 其中𝐶𝛼的負號是由於SAE 符號習慣問題而加入的修正[2]。
圖2.4 交叉線層與輻射線層胎之轉向力對側滑角關係[3]
2-3 車輛轉向幾何
轉向幾何(steering geometry)指的是輪胎轉向角之間的關係,一般常會以各車輪 軸心延伸線之交點來描述。以兩種常見之轉向幾何為例,第一種為平行轉向幾何 (Parallel steering geometry),是指轉向時兩轉向輪之轉向角相同,此時車輪軸心延 伸線之交點會落在無窮遠處;第二種為阿克曼(Ackermann)轉向幾何,是指轉向時 所有車輪軸心延伸線交於一點。
對前軸轉向之二軸車輛來說,若要達到阿克曼轉向幾何,則車輪軸心延伸線必 須交在圖2.5 之𝐶𝑇的位置,意即落於後軸之輪軸延伸線上,才能使所有車輪以沿輪 胎平面的方向繞著同一圓心滾動。在此情況下,輪胎可以避免側向滑動的情況,有 利於輪胎磨耗的減少[3]。
𝐶𝑇為理想的轉向中心。假如車輛以極低的車速轉向時,側向加速度極小,幾乎 可忽略,因此各車輪也幾乎不會產生側向力,此時車輪側滑角可視為零,車輛轉彎 之瞬時迴轉中心𝐼𝐶會與理想轉向中心𝐶𝑇重疊。
i
oC
G
oC I
T
C
L
B
R
G
i圖2.5 阿克曼轉向幾何[20]
在阿克曼轉向幾何下,同軸之內側輪胎轉向角會大於外側輪胎轉向角,內外側 輪轉向角之數學關係式如式(2.2)所示。
cot 𝛿𝑂− cot 𝛿𝐼 =𝐵
𝐿 (2.2)
其中𝛿𝑂、𝛿𝐼、B、L 分別為外側輪轉向角、內側輪轉向角、輪距、前後軸軸距。
由式(2.2)可得知,此情況下之前束角為負值(toe-out),隨著輪胎轉向角的增加,
內外側車輪的轉向角差值也增加[35]。
除了平行與阿克曼轉向幾何之外,仍有其他種類的轉向幾何。此處同樣以前軸 轉向之二軸車輛來說明,當內側輪轉向角大於外側輪時,此種情況稱為正阿克曼 (pro-Ackermann) , 而 當 內 側 輪 轉 向 角 小 於 外 側 輪 時 , 則 稱 為 反 阿 克 曼 (anti- Ackermann)。正阿克曼又可依據內外側輪轉向角之差值來分類,若差值大於阿克曼 之差值,屬於強阿克曼(over-Ackermann),小於阿克曼之差值,則屬於弱阿克曼 (under-Ackermann)。前述轉向幾何之前軸車輪軸心延伸線交點位置分佈如圖 2.6 所 示。
13
圖2.6 二軸車輛轉向幾何分類[36]
在真實雙軸車輛上,由於轉向連桿機構之尺寸與運動狀態的限制,使得輪胎轉 向角難以在所有方向盤轉角下都達到阿克曼轉向幾何,也因此在設計轉向機構時 常會依據行駛狀態的需求,以不同的轉向幾何為設計目標,如圖 2.7 所示,
「THEORETICALLY CORRECT CURVE」為阿克曼轉向幾何之關係曲線,介於中 間之曲線即是實際在車輛上使用的弱阿克曼轉向幾何關係。
圖2.7 不同轉向幾何之內外側輪轉向角關係[3]
2-4 自行車轉向模型
自行車轉向模型為探討車輛轉向行為時常用之簡化模型,本節將簡單介紹自 行車穩態模型與統御方程式[3],說明輪胎轉向角、車速和輪胎受力等參數之間的 關係,以及穩態轉向的三種特性。
假設一輛前輪轉向之二軸車輛,其車重為W、車速V向前行駛、重心與前後軸 之距離分別為𝐿𝑓和𝐿𝑟、轉向角為𝛿𝑓,若此車輛左右對稱,可以將其以簡化之自行車 模型表示。圖2.8 為無驅動力之自行車進行轉向時的自由體圖,由於轉向時輪胎會 產生側滑角,所以瞬時迴轉中心𝐼𝑐會落在比理想轉向中心𝐶𝑇更靠近車前的位置。模 型受力的部分,此處忽略滾動阻力與空氣阻力,並假設偏擺率為定值,因此輪胎只 會有前輪轉向力𝐹𝑦′𝑓與後輪轉向力𝐹𝑦′𝑟產生,且兩力對重心必須維持力矩平衡。總 合力∑ 𝐹會通過車輛重心,方向指向合力中心(force center) 𝐶𝐹,由於忽略氣胎曳距 (pneumatic trail),故𝐶𝐹會和𝐶𝑇在同一位置。另外,總合力∑ 𝐹可分解為兩方向互相 垂直的力,一力為方向指向瞬時迴轉中心𝐼𝐶的力,此力即為提供車輛過彎所需之向 心力(centripetal force)𝐹𝑛,另一力為轉向拖滯(cornering drag)所造成的拖滯力(tire drag)𝐹𝑑,方向與車速前進方向相反,會造成車速無法維持定值,需要驅動力補償來 使得車速前進方向之合力為零,才能達到穩態轉向。但若拖滯力極小,在適當的假 設條件下可以將其忽略,此時合力即為向心力,不影響車速,故車輛可以進行穩態 轉向,參考Dixon[4]。
CT IC
Lr
RG
CG
Lf
Lr
f f
V
rFn
Fd
F Ff
Fr
Fy f
Fy r CF
RG Lf RG
圖2.8 無驅動力之自由體圖[4]
當輪胎轉向角很小時,重心迴轉半徑𝑅𝐺會遠大於軸距𝐿,透過此特性可以寫出 前輪轉向角𝛿𝑓、前輪側滑角𝛼𝑓與後輪側滑角𝛼𝑟之關係式,如式(2.3)所示,參考 Dixon[4]。圖 2.9 為角度關係式之圖示。
15
r
f
f GL R
圖2.9 角度關係[20]
𝛿𝑓 = 𝐿
𝑅𝐺 + (𝛼𝑓− 𝛼𝑟) (2.3)
依據力矩平衡關係針對式(2.3)進行變數代換即可推導得到自行車穩態轉向之 統御方程式(governing equation),如式(2.4)所示,參考 Wong[3]。
𝛿𝑓 = 𝐿
𝑅𝐺 + (𝑊𝑓 𝐶𝛼𝑓 − 𝑊𝑟
𝐶𝛼𝑟) 𝑉2 𝑔𝑅𝐺
= 𝐿
𝑅𝐺 + 𝐾𝑢𝑠 𝑉2 𝑔𝑅𝐺
= 𝐿
𝑅𝐺 + 𝐾𝑢𝑠𝑎𝑦 𝑔
(2.4)
其中𝑊𝑓、𝑊𝑟、𝐶𝛼𝑓、𝐶𝛼𝑟分別為前輪正向負載、後輪正向負載、前輪轉向剛性與後 輪轉向剛性;𝐾𝑢𝑠為轉向不足係數(Understeer coefficient),單位為弧度,𝑎𝑦為作用在 車輛重心之車身側向加速度。式(2.4)可說明,車輛穩態轉向之轉向角為軸距、重心 迴轉半徑、前後輪正向負載、輪胎轉向剛性與車速之函數。
式(2.4)中,轉向不足係數之數值對於穩態轉向特性有所影響,依據轉向不足係 數等於、大於、小於零,可以將穩態轉向行為分為三種,分別是中性轉向(neutral steer)、轉向不足(understeer)與轉向過度(oversteer)[3],如圖 2.10 所示。
圖2.10 不同轉向特性之車輛在定圓迴轉時其轉向角與車速之關係[3]
1. 中性轉向
當轉向不足係數等於零(𝐾𝑢𝑠 = 0),即前後輪側滑角相等時,式(2.4)可寫成如式 (2.5)所示。由式(2.5)可看出,車速變化不影響迴轉半徑,迴轉半徑只與轉向角相關。
換句話說,當固定方向盤轉角位置時,一輛具有中性轉向特性之車輛的迴轉半徑不 隨車速增減而改變。
𝛿𝑓 = 𝐿
𝑅𝐺 (2.5)
2. 轉向不足
當轉向不足係數大於零(𝐾𝑢𝑠 > 0),即前輪之側滑角大於後輪時,若輪胎轉向角 固定,隨著車速增加,迴轉半徑也會跟著增加。因此,對於具有轉向不足特性之車 輛,在車速提高的過程中,迴轉半徑會大於具有中性轉向特性之車輛,若要維持固 定的迴轉半徑,則必須增加方向盤之轉角。
3. 轉向過度
當轉向不足係數小於零(𝐾𝑢𝑠 < 0),即前輪之側滑角小於後輪時,若輪胎轉向角 固定,隨著車速增加,迴轉半徑會變小。因此,對於具有轉向過度特性之車輛,在 車速提高的過程中,迴轉半徑會小於具有中性轉向特性之車輛,若要維持固定的迴 轉半徑,則必須減少方向盤之轉角。
17
圖2.11 不同轉向特性之車輛在固定轉向角下迴轉半徑隨車速增加之變化[3]
圖 2.11 繪製出不同轉向特性之車輛在固定轉向角之情況下的行駛路徑,隨著 車速增加,具有中性轉向特性的車輛會以固定的迴轉中心與迴轉半徑行駛;具有轉 向不足特性的車輛會偏離原本的圓軌跡,迴轉半徑漸漸增加;若是具有轉向過度特 性的車輛則會偏向原本的迴轉中心,迴轉半徑漸漸縮小。
2-5 四軸車輛穩態轉向模型
本研究之目的為探討四軸車輛轉向幾何對於轉向特性之影響,設計一新型轉 向幾何,並以實際機構之設計證明新型轉向幾何在實車應用上的可行性。因此本研 究參考魯士強[21],以三自由度四軸車輛穩態轉向模型來模擬不同轉向幾何下的轉 向特性,藉此比較轉向幾何的優劣。
本節將列出此模型的基本假設,並介紹所使用的輪胎、懸吊和車輛運動模型,
最後以牛頓力學推導整車的穩態力平衡方程組,其中包括車輛轉向時在切線與法 線方向之力平衡,以及繞重心施力之偏擺力矩的平衡。
2-5-1 基本假設
實際車輛是由許多元件所構成,整體系統相當複雜,再加上環境因素與車輛之 交互作用,更是難以完整地分析與討論,因此,為了簡化分析的難度,本研究針對 四軸車輛穩態轉向模型設定了以下之假設,參考魯士強[21]:
1. 車輛僅以穩態轉向行駛,其車速與重心偏擺角速度為定值,不討論暫態之情況。
2. 整車為一剛體,整車質量坐落在重心,具有縱向、側向與偏擺方向三個自由度。
3. 車輛行駛於水平且無坡度之路面,因此重力只作用於垂直地面的方向。
4. 忽略空氣阻力之影響,僅討論輪胎與地面之間的作用力。
5. 外傾角為零,整車受到之側向力只由輪胎的側滑提供。
6. 大王銷無後傾角(caster angle),其中心線方向垂直地面。
7. 回正力矩在實際車輛上之數值極小,且並非本研究之討論重點,故忽略氣胎曳 距(pneumatic trail)。
8. 假設車輛的差速器可將引擎輸出之驅動力平均分配,使各車輪的驅動力相同。
9. 輪胎只有側向滑動,無縱向滑動。
10. 重型卡車之輪胎側向力在側滑角為16°時達到路面附著極限。
11. 路面靜摩擦係數夠大,足夠供給輪胎所需的附著力,只要在側滑角量值限制內,
輪胎就不會打滑,若超過限制則不進行討論。
12. 輪胎模型採用 Magic Formula。詳細的輪胎模型建立將於 2-5-2 小節介紹。
13. 車輛的懸吊機構已被簡化。詳細的簡化方法與模型建立將於 2-5-3 小節說明。
2-5-2 Magic Formula 輪胎模型
如同2-2 節所描述,輪胎對於車輛運動有著極大的影響力,因此輪胎模型的建 立是穩態轉向特性分析中非常重要的一環。本研究採用的輪胎模型為Bakker[37]等 人於1987 年提出的 Magic Formula (本文簡稱 MF),此模型主要是根據輪胎特性與 實驗數據所建立。近幾十年也由 Pacejka 等人提出了多種改良的版本[38]。時至今 日,MF 已是現今業界模擬時常用的標準輪胎模型[39]。
MF 為一種曲線方程式,其一般式如式(2.6)到式(2.8)所示,式中所使用到的參 數由實驗數據轉換而來,各項參數所代表的意義如表 2.1 所示,參考 Pacejka 和 Besselink[40]。藉由此方程式可以計算出側向力與側滑角、縱向力與滑差或是回正 力矩與側滑角的關係。
𝑦(x) = 𝐷 sin{𝐶 tan−1[𝐵𝑥 − 𝐸(𝐵𝑥 − tan−1𝐵𝑥)]} (2.6)
𝑌(𝑋) = 𝑦(𝑥) + 𝑆𝑉 (2.7)
𝑥 = 𝑋 + 𝑆𝐻 (2.8)
19
表2.1 MF 之參數定義[40]
𝐵 剛性因子 (stiffness factor) 𝐶 形狀因子 (shape factor) 𝐷 峰值因子 (peak factor) 𝐸 曲率因子 (curvature factor) 𝑆𝑉 垂直偏移量 (horizontal shift) 𝑆𝐻 水平偏移量 (vertical shift)
MF 繪製出的曲線如圖 2.12 所示,圖中的水平偏移量(𝑆𝐻)與垂直偏移量(𝑆𝑉)是 考慮胎體錐度、簾布層轉向效應和輪胎外傾角後所加入的調整,參考 Pacejka 和 Bakker[41]。在不考慮上述幾項因素的情況下,此曲線會通過原點(𝑋 = 𝑌 = 0),且 對稱於原點,其峰值落在𝑥𝑚所在位置,經過最大值後,此曲線會趨近於一水平漸 近線,漸近線之數值為𝑦𝑎。
圖2.12 MF 曲線[40]
在本研究中,MF 僅被用來計算輪胎轉向力,其為側滑角、外傾角與垂直負載 之函數,如式(2.9)所示。
𝐹𝑦′𝑖 = 𝐹𝑦0(𝛼𝑖, 𝛾𝑖, 𝐹𝑉𝑖) (2.9) 單位 : 𝐹𝑦(𝑁)、𝛼(𝑟𝑎𝑑)、𝛾(𝑟𝑎𝑑)、𝐹𝑉(𝑁)
式中𝐹𝑉𝑖為垂直力,方向向上為正。此符號之導入主要是因為在SAE 座標系統 中,正向力𝐹𝑧′𝑖向下為正,而ISO 座標系統中,𝐹𝑧′𝑖向上為正,如圖2.13 所示,若 是同樣的符號,可能會造成方向定義之混淆,因此在此導入垂直力之符號以避免計 算錯誤。
圖2.13 ISO 輪胎座標系統[42]
將式(2.6)到式(2.8)改寫成無滑差、純側滑(pure slip)之側向力形式:
𝐹𝑦0 = 𝐷𝑦sin{𝐶𝑦tan−1[𝐵𝑦𝛼𝑦− 𝐸𝑦(𝐵𝑦𝛼𝑦− tan−1𝐵𝑦𝛼𝑦)]} + 𝑆𝑉𝑦 (2.10)
𝛼𝑦 = 𝛼 + 𝑆𝐻𝑦 (2.11)
式(2.10)中的係數𝐶𝑦、𝐷𝑦與𝐸𝑦分別為:
𝐶𝑦 = 𝑃𝐶𝑦1 (2.12)
𝐷𝑦 = 𝜇𝑦𝐹𝑉 (2.13)
𝜇𝑦 = (𝑝𝐷𝑦1+ 𝑝𝐷𝑦2𝑑𝑓𝑉) (1 − 𝑝𝐷𝑦3𝛾𝑦2) (2.14)
𝐸𝑦 = (𝑝𝐸𝑦1+ 𝑝𝐸𝑦2𝑑𝑓𝑉) [1 − (𝑝𝐸𝑦3+ 𝑝𝐸𝑦4𝛾𝑦) sgn(𝛼𝑦)] , 𝐸𝑦 ≤ 1 (2.15) 其中𝛾𝑦 = 𝛾 ,為車輪外傾角,sgn()為判斷正負號之函數,計算得出的值包含
−1、0 或 1。𝑑𝑓𝑉是正規化之垂直負載變化,如式(2.16)所示。
𝑑𝑓𝑉 =𝐹𝑉 − 𝐹𝑉0
𝐹𝑉0 (2.16)
其中𝐹𝑉為垂直負載量,𝐹𝑉0為輪胎額定負載量。
轉向剛性係數𝐵𝑦如下:
K𝑦0 = 𝑝𝐾𝑦1𝐹𝑉0sin [2 tan−1( 𝐹𝑉
𝑝𝐾𝑦2𝐹𝑉0)] (2.17) K𝑦 = 𝐾𝑦0(1 − 𝑝𝐾𝑦3|𝛾𝑦|) (2.18) 𝐵𝑦 = 𝐾𝑦
𝐶𝑦𝐷𝑦 (2.19)
水平偏移量𝑆𝐻𝑦與垂直偏移量𝑆𝑉𝑦之方程式如下:
21
𝑆𝐻𝑦 = 𝑝𝐻𝑦1+ 𝑝𝐻𝑦2𝑑𝑓𝑉+ 𝑝𝐻𝑦3𝛾𝑦 (2.20) 𝑆𝑉𝑦 = 𝐹𝑉[𝑝𝑉𝑦1+ 𝑝𝑉𝑦2𝑑𝑓𝑉 + (𝑝𝑉𝑦3 + 𝑝𝑉𝑦4𝑑𝑓𝑉) 𝛾𝑦] (2.21) 由於本研究假設輪胎內部結構均勻,亦即不考慮胎體錐度與簾布層轉向效應,
而且也不考慮外傾角,因此水平與垂直偏移量皆為零,如式(2.22)。
𝑆𝐻𝑦 = 0, 𝑆𝑉𝑦 = 0 (2.22)
式(2.10)到式(2.22)即為本研究所使用到的 MF 輪胎模型,參考 MSC Software Corporation[38]。其中未說明之代數符號皆列在表 2.2 中。
本研究的討論對象為四軸車輛,由於沒有實際輪胎之數據,因此輪胎相關數據 從 ADAMS 內現有的重型卡車輪胎模型中選取較接近實際輪胎規格之數據,採用 的規格為 315/80R22.5,輪胎特性曲線如圖 2.14 和圖 2.15 所示,所使用到相關數 據如表2.2 所示。
圖2.14 重型卡車輪胎之側向力與側滑角關係圖
圖2.15 重型卡車輪胎之側向力與垂直負載關係圖 表2.2 MF 數據(315/80R22.5 重型卡車輪胎) 𝐹𝑉0 35000N Nominal wheel load 𝑝𝐶𝑦1
1.5874
Shape factor Cfy for lateral forces𝑝𝐷𝑦1
0.73957
Lateral friction Muy𝑝𝐷𝑦2
0.075004
Variation of friction Muy with load 𝑝𝐷𝑦3 8.0362
Variation of friction Muy with squared camber 𝑝𝐸𝑦10.37562
Lateral curvature Efy at Fznom𝑝𝐸𝑦2
0.069325 Variation of curvature Efy with load 𝑝𝐸𝑦3 0.29168 Zero order camber dependency of curvature Efy 𝑝𝐸𝑦411.559
Variation of curvature Efy with camber 𝑝𝐾𝑦1 10.289
Maximum value of stiffness Kfy/Fznom 𝑝𝐾𝑦2 3.3343 Load at which Kfy reaches maximum value 𝑝𝐾𝑦3
0.25732 Variation of Kfy/Fznom with camber 𝑝𝐻𝑦1 0.0056509 Horizontal shift Shy at Fznom 𝑝𝐻𝑦2 0.0020257
Variation of shift Shy with load 𝑝𝐻𝑦3 0.038716
Variation of shift Shy with camber 𝑝𝑉𝑦10.015216
Vertical shift in Svy/Fz at Fznom 𝑝𝑉𝑦2 0.010365
Variation of shift Svy/Fz with load 𝑝𝑉𝑦3 0.31373
Variation of shift Svy/Fz with camber 𝑝𝑉𝑦4
0.055766 Variation of shift Svy/Fz with camber and load23
2-5-3 簡化懸吊模型
如同2-5-2 小節所述,正向負載會對側向力產生影響,一旦車輛上每個輪胎的 負載大小有所差異,每個輪胎的側向力就會不同,如圖 2.15 所示,因此必須建立 懸吊系統數學模型,並考慮車輛穩態轉向時發生的正向負載轉移效應,藉此算出不 同車輪的正向負載與側向力。
參考過去的研究[11, 19, 20]可得知,懸吊模型的建立必須給予適當的條件假設,
才能避免四軸車輛之輪胎出現靜不定的狀況,使得各輪正向負載無法由力平衡方 程式求得。本研究採用魯士強[21]發展出的三自由度簡化懸吊模型,此模型考慮穩 態轉向過程中發生的車身垂直方向位移、側傾和俯仰運動等三個自由度。以下將對 此模型的建立進行說明。
圖2.16 為此模型的懸吊彈簧與車身關係圖,大寫 X、Y、Z 軸為原點 O 位於 車軸平面中心的固定座標系,車前方向為正X,右側為正 Y,朝向地面為正 Z,小 寫 x、y、z 軸為以車身中心𝑃𝑐𝑖為原點的附體座標系,正負方向同固定座標系。
∆Z、𝜑、𝜙分別為𝑃𝑐𝑖垂直位移、車身俯仰角和車身側傾角,當車輛發生側傾和俯仰 運動時,兩運動的轉軸分別為車軸平面上的X 軸與 Y 軸。假設車體為一剛體,彈 簧一端連接車體,另一端在車軸平面上與輪胎中心連接,且令所有彈簧之剛性皆相 同。
6
4
2
車軸平面 車身
7
5 8 3
X
Y
Z
z
y
ci
x P
O
Z
1
圖2.16 懸吊彈簧與車身關係[21]
![圖 2.3 輪胎受側向力之 (a) 前視圖 (b) 上視圖[3] 一般而言,轉向力](https://thumb-ap.123doks.com/thumbv2/9libinfo/9603599.629932/28.892.238.786.121.382/輪胎側向前視圖上視圖一般而.webp)
![圖 2.6 二軸車輛轉向幾何分類[36]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9603599.629932/31.892.292.788.112.439/圖26二軸車輛轉向幾何分類36.webp)
![圖 2.10 不同轉向特性之車輛在定圓迴轉時其轉向角與車速之關係[3] 1. 中性轉向 當轉向不足係數等於零(](https://thumb-ap.123doks.com/thumbv2/9libinfo/9603599.629932/34.892.237.769.119.418/不同轉向特性之車輛在定圓迴轉時其.webp)
![圖 2.13 ISO 輪胎座標系統[42]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9603599.629932/38.892.128.791.124.953/圖213ISO輪胎座標系統42.webp)