文章编号: 1004- 132
g (2000) 07- 0805- 04
三自由度并联机器人操作平台的主运动螺旋研究
方跃法 教授
方跃法 黄 真
摘要: 讨论三自由度并联机器人的操作平台的瞬时螺旋的确定方法, 根
据平面表示的空间运动螺旋的几何特性, 提出基于二阶曲线分解理论的操作 器运动螺旋系主螺旋的识别的解析方法, 为自由度少于 6 的并联机构的运动 特性及其操作器运动螺旋系的研究提供了必要的理论基础。
关键词: 空间机构; 并联机器人; 运动分析; 螺旋理论 中图分类号: TH 112. 1 文献标识码: A
收稿日期: 1998—08—26
基金项目:国家自然科学基金(69875002)资助项目;中科院机 器人学开放实验室基金资助项目
并联机器人具有许多串联机器人所没有的优 点, 近年来已成为国内外机器人研究的热点之一。
H un t
[ 1 ]根据机构运动的特性, 提出了多种并联机 构的结构形式, 其中的三自由度的 3- R PS 并联 机构引起了许多研究者的兴趣。L ee 等人
[ 2, 3 ]利 用 它 作 为 微 动 机 器 人 应 用 于 微 电 子 加 工, W a ld ro n 等人
[ 4 ]把它作为机器人手腕部分的微调
机构。
三自由度机器人具有与六自由度机器人不同 的特殊运动学问题, 因此在设计和应用时必须了 解其操作平台的运动特性。
研究机构运动特性的理想工具是螺旋理论。
B a ll
[ 5 ]在本世纪初发表了螺旋理论的经典著作, 对螺旋理论作了全面、系统的研究。H un t
[ 6 ]继承 和发展了经典的螺旋理论, 螺旋理论揭示了刚体 运动的本质, 因此它在现代机器人运动学的研究 方面发挥了十分重要的作用
[ 7~10 ]。研究螺旋系的 关键在于确定螺旋的分布曲面, 而确定这些分布 曲面在空间的位置、方位 的重要因素是螺旋系的 主螺旋, 主螺旋是螺旋系中垂直且相交的螺旋, 它们代表操作平台的独立运动, 主螺旋的个数与 螺旋的阶数相同。
1 操作平台的瞬时运动确定
图 1 所示的 3- R PS 并联机构的上下平台皆 为等边三角形, 其外接圆的半径分别为
r和
R,
B1P1、
B2P2和
B3P3分别是连接上下平台的第一、
第二和第三分支, 固定坐标系
O-
x y z的原点
O在 下平台的中心, 其
z轴垂直于下平台平面,
x轴 通 过机构的第一分支的转动副
B1, 坐标系
P-
图1 32R PS并联机器人机构
x
′
y′
z′固定在上平台的中心处,
z′轴垂直于上平 台,
x′轴通过第一分支的球铰
P1, 连接于下平台 的 3 个转动副
B1、
B2和
B3的轴线分别是
u1、
u2和
u3, 它们可以在空间任意分布。若上平台的参考 点
P相对于固定坐标系的速度
vP及平台的角速度 Ξ 给定后, 求解 3 个输入驱动器的输入速度为速 度反解, 当给定平台的速度和角速度后, 可以有如 下速度方程式:
vP+ Ξ ×ri= Ξi×li+ L
g
ili i= 1, 2, 3 (1)式中,
ri为上平台中心到各球铰中心
Pi的向量;
li是 沿
BiPi方 向 的 单 位 向 量,
li=
Ligg
Lig (
Li=
BiPi) ;
Lg
i为各分支的驱动输入线速度; Ξ
i为分支
Li绕转动副轴线
ui的转动角速度。
式 (1) 两边同时点乘
li得
g
Li= (vP + Ξ ×ri)gli i= 1, 2, 3 (2)或写成矩阵形式:
{L
g
i} = [ l ]{vP} + [ l0]{Ξ} (3)式中,
{
Lg } = {
Lg
1
L
g
2
L
g
3
}
T{
vP} = { (
vP)
x(
vP)
y(
vP)
z}
T・
・
{ Ξ} = {Ξ
xΞ
yΞ
z}
T{
l} = {
l1l2
l3
}
T{
l0} = [
r1×
l1r2
×
l2r3
×
l3]
T= [
l01l02
l03
]
T另外, 将式 (1) 两边同乘以
ui得
(vP + Ξ ×ri)gui= L
g
ico sΑi (4)式中, Α
i为第
i分支中的移动副轴线
li与转动副轴 线
ui之间的夹角, 将式 (3) 代入式 (4) 并表示成矩 阵形式有
[D ]{vP} - [B ]{Ξ} = 0 (5) [D ] = [ lΑ] - [u ]
[B ] = [u0] - [ l0Α]
式中,
[ lΑ] = [ l1co sΑ1 l2co sΑ2 l3co sΑ3]T [ l0Α] = [ l01co sΑ1 l02co sΑ2 l03co sΑ3]T [ u ] = [u1 u2 u3]T
[ u0] = [u01 u02 u03]T= [ r1×u1 r2×u2 r3×u3]T
联立式 (3) 和式 (5) 可求得:
vP = [G ]{L
g
}Ξ= [G ]{L
g
} (6)式中,
[G ] = ( [ l0] [B ]- 1[D ] + [ l ])- 1 [G ] = ( [ l ] [D ]- 1[B ] + [ l0])- 1。
在一般情况下, 矩阵[
B] 和[
D] 是非奇异的, 所以式 (6) 的解总是存在的, 若它们其中之一为 奇异矩阵的话, 只要将式 (3) 和式 (5) 作适当处理 即可, 本文不再讨论。
2 操作平台的运动螺旋系
当角速度及参考点的线速度求得后, 操作平 台的瞬时运动就可以用瞬时运动螺旋 Ξ
i$
i来表 示
[ 7 ]:
Ξi$i= Ξ+ ∈(vP + rP ×Ξ) (7)
螺旋节距
hi= ΞgvP
Ξg Ξ (8)
该 螺旋的轴线为空间一直线, 螺旋轴线的方 程为
ri×Ξ= vP + rP ×Ξ- hiΞ (9)
式中,
ri为螺旋轴线上任一点 (
x,
y,
z) 的向量, 这 时操作平台的瞬时运动就为绕螺旋轴线的转动和 沿螺旋轴线的移动。操作平台的所有瞬时运动螺 旋所组成的螺旋集就称为该操作平台的螺旋系。
将式 (5) 代入式 (9) 得
[ rυ
i]{Ξx Ξy Ξz}T= ( [Q ] + [ rυ
P] - hiI ){Ξx Ξy Ξz}T (10)
式中, [ υ
ri] =
0 -
z yz
0 -
x-
y x0
;
[ υ
rP] =
0 -
Pz PyPz
0 -
Px-
Py Px0
;
[
Q] = [
B] [
D]
- 1;
I为单位矩阵。从式 (10) 中消 去 Ξ
x、 Ξ
y、 Ξ
z, 得
c11x2+ c22y2+ c33z2+ c12x y+ c23y z+ c13x z+ c14x+ c24y
+ c34z+ c44= 0 (11)
式中,
c11= q11- hi c22= q22- hi c33= q33- hi
c12= q21+ q12 c23= q31+ q23 c13= q31+ q13
c14= q31q12- q11q32- q21q13+ q11q23+ hi(q32- q23+ 2px) - 2q11px - q21py - q12py - q31pz- q13pz
c24= q31q22- q21q32- q22q13+ q12q23+ hi(q13- q31+ 2py) - q21px- q12px- 2q22py - q32pz- q23pz
c34= q31q22- q13q32- q21q33+ q12q33+ hi(q21- q12+ 2pz) - q31px - q13px - q32py - q23py- 2q33pz
c44= q21q32q13 - q31q22q13+ q31q12q23 - q11q32q23 - q21q12q33+ q11q22q33+ hi(q21q12- q11q22+ q31q13+ q32q23- q11q33- q22q33) - h2i(q11+ q22+ q33) h3i+ px(q11q32- q13q12
+ q21q13 - q11q32 - q23hi + q23hi) + p2x(q11 - hi) + py(q21q32- q31q22+ q22q13- q12q23- q13hi+ q31hi) + p2y(q22
- hi) + pxpy(q21+ q12) + pz(q13q32- q31q23+ q21q33- q12q33- q21hi+ q12hi) + p2z(q33- hi) + pxpz(q31+ q13) + pypz(q32+ q22)
式中,
qij(
i,
j= 1, 2, 3) 为[
Q] 中第
i行、第
j列的 元素;
px、
py、
pz为向量
rP的各坐标分量。
式 (11) 表示的就是螺旋系中所有具有节距
hi的螺旋所在的二次曲面, 该曲面为单叶双曲面方 程。三阶螺旋系还可以表示在平面内。由前述可 知, 确定平台瞬时运动的独立参数只有 3 个, 即 机构的 3 个独立输入线速度
Lg
1
、
Lg
2
和
Lg
3
, 所以决 定平台运动螺旋的参数也是这 3 个, 故称该螺旋 系为三阶螺旋系。将式 (6) 代入式 (8) 和式 (9) 得
hi= {L
g
}T[G ]T[G ]{Lg
}{L
g
}T[G ]T[G ]{Lg
} (12)[ rυ
i] [G ]{L
g
} = ( [G ] + [ rυP] [G ] - hi[G ]{L
g
} (13)由式 (12) 和式 (13) 可知, 螺旋的节距和轴线 都是 3 个独立输入的函数, 并且节距的值以及轴 线的位置实际上与 3 个独立参数的幅值无关, 而 只与它们的比值有关, 即如果机构的 2 组输入分 别是{
Lg
1
L
g
2
L
g
3
} 和{ Α
Lg
1
Α
Lg
2
Α
Lg
3
}, Α为任意
数, 这时虽然平台绕螺旋轴线转动和沿螺旋轴线 移动的速度不一样, 但螺旋轴线在空间的位置以
6・ 0
・8
中国机械工程第11卷第7期2000年7月
及螺旋的节距是不变的。若设
m = L
g
1gg
L3; n = Lg
2gg
L3则式 (10) 和式 (11) 就可以表示成
m和
n的函数:
hi= {m n 1} [G ]T[G ]{m n 1}T
{m n 1} [G ]T[G ]{m n 1}T (14) [ rυi] [G ]{m n 1}T = ( [G ] + [ rυP] [G ] -
hi[G ]{m n 1}T (15)
可以看出, 任一组数 (
m,
n) 都对应于一螺 旋, 这样就可以用平面上的点来表示螺旋, 平面 上任一点都与一螺旋相对应, B all
[ 5 ]称这种表示 法为螺旋的平面表示法。进一步从式 (13) 的 3 个 方程中消去螺旋轴线上点的坐标 (
x,
y,
z) , 可得
a11m2+ 2a12m n+ a22n2+ 2a13m + 2a23n+ a33= 0 (16)
式中,
a11= g11g11+ g21g21+ g31g31- hi( g211+ g221+ g231
a12= 1
2 (g12g11+ g22g21+ g32g31+ g11g12+ g21g22+ g31g32- hi(g11g12+ g21g22+ g31g32)
a22= g12g12+ g22g22+ g32g32- hi(g212+ g222+ g232)
a13= 1
2 (g13g11+ g23g21+ g33g31+ g11g13+ g21g23+ g31g33- hi(g11g12+ g21g22+ g31g32)
a23= 1
2 (g13g12+ g23g22+ g33g32+ g12g13+ g22g23+ g32g33- hi(g12g12+ g22g22+ g32g32)
a33= g13g13+ g23g23+ g33g33- hi(g213+ g223+ g233)
式中,
gij、
gij(
i,
j= 1, 2, 3) 分别为[
G]、[
G] 中第
i行、第
j列的元素。
式 (16) 表明, 三阶螺旋系中所有具有相同节 距的螺旋可表示为平面中的 1 条二次曲线。
3 操作平台螺旋系的主螺旋
从操作平台的螺旋系中螺旋分布的曲面方程 式 (11) 及平面表示法中的曲线方程式 (16) 中不 能直接得出螺旋系的主螺旋。可根据主螺旋的一 些特性, 从螺旋系中识别出操作平台的 3 个主螺 旋。设螺旋系的 3 个主螺旋的节距分别为
h1、
h2和
h3, 并且
h1>
h2>
h3, 若螺旋系中螺旋的节距等 于
h1, 则式 (16) 表示的二次曲线退化为相交于一 点的二虚直线; 当螺旋的节距等于
h3时, 该二次 曲线退化为相交于另一点的二虚直线; 而当螺旋 的节距等于
h2时, 该二次曲线退化为相交于一点 的二实直线
[ 6 ], 因此只要使式 (16) 表示的二次曲 线 分解为二直线, 就可以得出主螺旋的节距, 本 文正是根据这一理论来识别螺旋系的主螺旋。
式 (16) 分解为二直线的充分必要条件是
∃=
a11 a12 a13
a21 a22 a23
a31 a32 a33
= 0 aij = aj i (17)
展开上式得
a1h3i + a2h2i + a3hi+ a4= 0 (18)
式中, 系数
ai(
i= 1, …, 4) 只与[
G] 和[
G] 中的元 素有关。对于一般的三阶螺旋系, 求解式 (18) 可 以得到
hi的 3 个根
hi1、
hi2和
hi3, 当螺旋的节距等 于其中的 1 个根时, 式 (16) 表示的二次曲线就退 化为二直线 (虚直线或实直线) , 所以求得的 3 个 根就是螺旋系主螺旋的节距。求得主螺旋的节距 后, 还须求出主螺旋的另一主要元素, 即主螺旋 的轴线, 因为主螺旋的轴线对应于平面上的一点, 因此求主螺旋的轴线, 也就是求平面表示法中点 的坐标, 这个点的坐标也就是式 (16) 分解后的二 直线的交点。
将
hi1、
hi2和
hi3分别代入式 (16) , 则各系数
aij成为常系数, 二次曲线分解为 2 条直线的方程为
a12m + a22n+ a23+ m a212- a11a22+ a12a23- a22a13
a212- a11a22
= 0
a12m + a22n+ a23- m a212- a11a22- a12a23- a22a13
a212- a11a22
= 0
(19)
因此, 当
a212-
a11a22< 0 时, 二直线为虚直 线; 反之当
a212-
a11a22> 0 时, 二直线为实直线。
这样二直线交点的坐标为
m = a22a13- a12a23
a212- a11a22
n= - a23
a22- a12
a22
a22a13- a12a23
a212- a11a22
(20)
对应于
hi1、
hi2和
hi3, 有平面上表示的 3 个主 螺旋 (
m1,
n1)、(
m2,
n2) 和 (
m3,
n3)。把求得的平面 坐标代入式 (14) 和式 (15) 即可求出这主螺旋在 空间的位置。
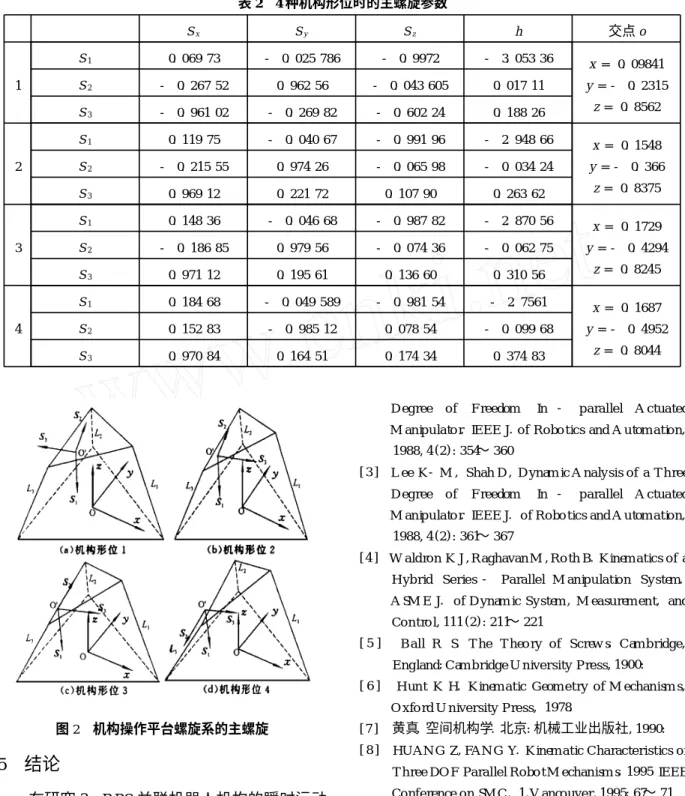
4 数值实例
设图 1 所示机构的结构参数如下: Α
1= Α
2= Α
3= 90° ,
u1= {0 14 019 01173 2},
u2= { - 0 19794 - 01103 59 011732},
u3= {0 15794 - 017964 011732},
R= 100mm ,
r= 60mm , 当 机构的 3 条支链的长度分别为表 1 中所列的 4 种 形位时, 主螺旋的原点坐标及方向余弦列于表 2, 且示于图 2 中。
表1 机构的4种形位时的分支长度 单位: mm
L1 L2 L3
1 115 92. 5 89. 5
2 125 87. 5 82. 5
3 130 85. 0 79. 0
4 135 82. 5 75. 5
・
・
表2 4种机构形位时的主螺旋参数
Sx Sy Sz h 交点o
1
S1 0. 069 73 - 0. 025 786 - 0. 9972 - 3. 053 36
S2 - 0. 267 52 0. 962 56 - 0. 043 605 0. 017 11
S3 - 0. 961 02 - 0. 269 82 - 0. 602 24 0. 188 26
x = 0. 09841 y = - 0. 2315
z= 0. 8562
2
S1 0. 119 75 - 0. 040 67 - 0. 991 96 - 2. 948 66
S2 - 0. 215 55 0. 974 26 - 0. 065 98 - 0. 034 24
S3 0. 969 12 0. 221 72 0. 107 90 0. 263 62
x = 0. 1548 y = - 0. 366
z= 0. 8375
3
S1 0. 148 36 - 0. 046 68 - 0. 987 82 - 2. 870 56
S2 - 0. 186 85 0. 979 56 - 0. 074 36 - 0. 062 75
S3 0. 971 12 0. 195 61 0. 136 60 0. 310 56
x = 0. 1729 y = - 0. 4294
z= 0. 8245
4
S1 0. 184 68 - 0. 049 589 - 0. 981 54 - 2. 7561
S2 0. 152 83 - 0. 985 12 0. 078 54 - 0. 099 68
S3 0. 970 84 0. 164 51 0. 174 34 0. 374 83
x = 0. 1687 y = - 0. 4952
z= 0. 8044
图2 机构操作平台螺旋系的主螺旋
5 结论
在研究 3- R PS 并联机器人机构的瞬时运动 的基础上, 讨论了其操作平台的瞬时螺旋的确定 方法及其螺旋系的平面表示方法, 并且提出了操 作器运动螺旋系主螺旋的识别的解析方法, 这对 自由度少于 6 的并联机构的运动特性及其操作器 运动螺旋系的研究都是有重要意义的。
参考文献:
[ 1 ] H un t K H. S t ructu ra l K inem a t ics o f In - Pa ra llel- A ctua ted Ro bo t - A rm s. T ran s. A SM E Jo u rna l o f M echan ism s, T ran sm issio n and A u tom a t io n in D esign, 1983, 105: 705~712
[ 2 ] L ee K- M , Shah D. K inem a t ic A na ly sis o f a T h ree
D eg ree o f F reedom In - p a ra llel A ctua ted M an ip u la to r. IEEE J. o f Ro bo t ics and A u tom a t io n,
1988, 4 (2) : 354~360
[ 3 ] L ee K - M , Shah D , D ynam ic A na ly sis o f a T h ree D eg ree o f F reedom In - p a ra llel A ctua ted M an ip u la to r. IEEE J. o f Ro bo t ics and A u tom a t io n,
1988, 4 (2) : 361~367
[ 4 ] W a ld ro n K J , R aghavan M , Ro th B. K inem a t ics o f a H yb rid Series - Pa ra llel M an ip u la t io n Sy stem.
A SM E J. o f D ynam ic Sy stem , M ea su rem en t, and Co n t ro l, 111 (2) : 211~221
[ 5 ] B a ll R S. T he T heo ry o f Screw s. Cam b ridge, Eng land: Cam b ridge U n iversity P ress, 1900:
[ 6 ] H un t K H. K inem a t ic Geom et ry o f M echan ism s, O xfo rd U n iversity P ress, 1978.
[ 7 ] 黄真. 空间机构学. 北京:机械工业出版社, 1990:
[ 8 ] HU AN G Z, FAN G Y. K inem a t ic Cha racterist ics o f T h ree DO F Pa ra llel Ro bo t M echan ism s. 1995 IEEE Co nference o n SM C , 1, V anco uver, 1995: 67~71 [ 9 ] H un t K H. Sp ecia l Co nfigu ra t io n s o f Ro bo t A rm s
v ia Screw T heo ry. Ro bo t ica, 1986, 4: 171~179 [ 10 ] M o ham ed M G, D uffy J. A D irect D eterm ina t io n o f
In stan tano u s K inem a t ics o f F u lly Pa ra llel Ro bo t M an ip u la to rs. T an s. A SM E J. M ech. T ran sm iss.
A u to. D es. , 1985, 107: 226~229
(编辑 卢湘帆)
作 者 简 介:方 跃 法,男, 1958年 生。 北 方 交 通 大 学(北 京 市
100044)机电学院教授。 研究方向为机械动力学、机器人机构学、
摩擦学等。发表论文40余篇。黄真,男, 1936年生。燕山大学(河 北省秦皇岛市 066004)教授、博士研究生导师。
8・ 0
・8
中国机械工程第11卷第7期2000年7月
band o f m om en ta ry flyw heel sp eed, it is less efficien t to elim ina te the no ise w ith co nven t io na l signa l p ro cessing m etho d s such a s filtering the da ta. A new com p en sa t io n m etho d, w h ich u t ilizes tw o sp eed sen so rs to iden t ify the no ise, is p resen ted in th is p ap er. T he exp erim en ta l resu lt s verified the accu racy and fea sib ility o f the deno ise m etho d to p ro cess the m om en ta ry sp eed signa l fo r eng ine m isfire detect io n.
Key words: too th to lerance m ea su rem en t no ise m om en ta ry crank shaft sp eed m isfire detect io n au tom o t ive eng ine
Three D im en s iona l F in ite E lem en t Ana lys is of Stress D istr ibution of Stress D irstr ibution of the Nozzle in the Th ick W a lled Pressure Vessel CA I Ho ngneng (X i′an J iao to ng U n iversity, X i′an, Ch ina ) W AN G Ya sheng ZHAN G Guo do ng p 7952797
Abstra tct: T he st ress d ist rib t io n s in a th ick w a lled p ressu re vessles w ere o b ta ined by th ree d im en sio na l fin ite elem en t ana ly sis. T he influences o f d ifferen t w elded st ructu res o n the st ress d ist ribu t io n s w ere stud ied, and the lo ad ing cap ab ility o f the p ressu re vessels w ith va rio u s w elded st ructu res w ere com p a red. In th is resea rch,
au tom a t ic d iv isio n o f th ree d im en sio na l m esh w a s accom p lished by m app ing and A u to lisp p ro g ramm ing.
T he resea rch resu lt s w ill be help fu l fo r the select io n o f w elded st ru tu re in the p ro duct io n o f p ressu re vessels.
Key words: p ressu re vessel fin ite elem en t ana ly sis w elded st ructu re st ress co ncen t ra t io n
Reduction of Rough Set A ttr ibutes U s ing Genetic A lgor ithm J IA Yao q in (X i′an J iao to ng U n iversity, X i′ an, Ch ina ) XU Guanghua SU N R u ix iang L IAN G L in p 7972800
Abstract: Ro ugh set is a new typ e o f da ta p ro cessing m etho d, and the reduct io n o f a t t ribu tes is it s m a in too l, w h ich is u sed to find the sim p lified com b ina t io n s o f
a t t ribu tes under the co nd it io n s sa t isfy ing the cla ssifica t io n p recisio n. S ince the a t t ribu te reduct io n is an N - P p ro b lem , t rad it io na l m etho d is d ifficu lt to be app lied in the p ract ica l app lica t io n o f ro ugh set s. In th is p ap er, u sing the op t im a l sea rch techn ique, a m etho d o f a t t ribu te reduct io n ba sed o n the m u lt i - o b ject op t im iza t io n genet ic a lgo rithm is p u t fo rw a rd. It im p ro ves reduct io n efficiency, and get s m o re than o ne k ind o f a t t ribu te reduct io n agg rega te. F ina lly, the a t t ribu te reduct io n is app lied in the fea tu re select io n o f o il ro u te fau lt signa l o f d iesel eng ine, and a goo d resu lt is o b ta ined.
Key words: ro ugh set genet ic a lgo rithm a t t ribu tes reduct io n fau lt d iagno sis
M odel ing of the Structura l Rel iabl ity Pred ica tion U s ing Inverse Ana lys is of Boundary E lem en t M ethod ZHU H uafeng (Zhejiang U n iversity, H angzho u, Ch ina) TAN
J ian ro ng J IA Gao shun p 8012804
Abstract: T he developm en t o f st ructu ra l reliab ility theo ry and bo unda ry elem en t m etho d is in t ro duced sy stem a t ica lly a t first. T hen the m a them a t ica l m o deling o f the st ructu ra l reliab ility p red ict io n is p resen ted by u sing inverse ana ly sis o f bo unda ry elem en t m etho d in th is p ap er. N um erica l exam p le is g iven to dem o n st ra te the u sefu lness o f the p ropo sed theo ry.
Key words: st ructu ra l reliab ility bo unda ry elem en t m etho d inverse ana ly sis m a them a t ica l m o deling
Iden tif ica tion of the Pr ic iple Screws of a Three DO F Para llel Robot M an ipula tor FAN G Yuefa (N o rthern J iao to ng U n iversity, B eijing, Ch ina ) HU AN G Zhen p 8052808
Abstract: T h is p ap er p resen t s a m etho d to determ ine the in stan taneo u s screw s o f the end- effecto r p la tfo rm o f a th ree deg rees o f freedom p a ra llel ro bo t m an ip u la to r. B y co n sidering the geom et ric cha racterist ics o f the p lana r rep resen t ing sp a t ia l m o t io n screw s, an ana ly t ica l m etho d ba sed o n the co n ic sect io n degenera t ing theo ry fo r iden t ifica t io n o f the p rincip le screw s o f the end- effecto r screw sy stem is p ropo sed. T h is is sign ifican t fo r the study o f the k inem a t ic cha racterist ics and the screw sy stem o f the p a ra llel ro bo t m an ip u la to r w ith less than six deg rees o f freedom.
Key words: sp a t ia l m echan ism , p a ra llel ro bo t, k inem a t ic ana ly sis, screw theo ry
A Study of D ynam ic Fracta lM odel of W ear Surfaces W U L iqun ( Zhejiang U n iversity, H angzho u, Ch ina )
YAN G J iangx in W U Zhao to ng p 8092810
Abstract: In th is p ap er, Cheby shev po lynom ia l w ith even o rder is app lied to revea l dynam ic p rincip le o f fracta l d im en sio n D o n w ea ring su rface. T he develop ing t rend o f the sca le am p litude G is ana lyzed du ring w ea ring p ro cess.
F ina lly, p red ict ing m o dels o f dynam ic w ea r ra te a re p resen ted. T he sim u la t io n resu lt s a re goo d ag reem en t w ith tha t from exp erim en t s under the sam e co nd it io n s.
Key words: dynam ic w ea r su rface fracta l m o del Cheby shev po lynom ia l w ea r ra te
The Pa th P lann ing of Redundan t TT-VGT M an ipula tors Ba sed on BP Neura l Network XU L iju ( S ichuan U n iversity, Chengdu, Ch ina) W U J iang p 8112813
Abstract: T he fo rw a rd d isp lacem en t ana ly sis o f redundan t tet rahed ro n2tet rahed ro n va riab le geom et ry t ru ss m an ip u la to rs is t ra ined ba sed o n B P neu ra l netw o rk, and then a so lu t io n to inverse d isp lacem en t ana ly sis p ro b lem is o b ta ined. T he p seudo2inverse o f J aco b ian m a t rix is a lso o b ta ined by u sing neu ra l netw o rk.
A m etho d o f t ra jecto ry p lann ing fo r redundan t T T2V GT m an ip u la to rs is p resen ted ba sed o n the m in im um o f change o f jo in t va riab les. T he sim u la t io n ca lcu la t io n o f
・
・