國立臺灣大學工學院機械工程學系 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
一種具混合動力功能的扭力分配差速器 之理念設計與分析
Conceptual Design and Analysis of a Torque Vectoring Differential with Electric Hybrid Functionality
林承楷 Cheng-Kai Lin
指導教授:劉 霆 博士 Advisor: Tyng Liu, Ph.D.
中華民國 107 年 7 月
July 2018
口試委員會審定書
誌謝
感謝恩師劉霆教授,從大學時期的專題到研究所的兩年,一步一步帶領我進入 車輛工程的廣闊天地,引領我在機械工程這個領域內找到了研究的目標以及熱忱,
也讓我在學術領域以及處世態度上獲益良多。在碩士論文研究期間,指引我研究的 方法以及正確的方向,並於準備口試期間悉心指導報告技巧以及改正論文,方能有 此篇論文之完成,學生於此致上由衷的敬意與謝意。
感謝李志中教授與詹魁元教授撥空前來指導我的論文,並提供寶貴建議,使本 篇論文能更臻完善。
感謝MMT 實驗室的前輩、同學以及後輩們。首先感謝學長正平、明憲,在我 初進MMT 之時,提供充實的學士專題內容與指導,使我對於實驗室的研究領域產 生興趣。感謝學長羿名、博仁、彥菘、先予在我的論文研究期間不厭其煩地和我討 論,對於我的研究提供指導與建議,並且在最後的口試演練提供幫助,真的非常感 謝。感謝資峻、禹軒、仁正、柏安大學期間一同參與學士專題,以及在碩一期間對 我的幫忙。感謝同學宏昇、崇賢和我一起度過研究所的兩年時光,從修課期間的互 相幫助、每天吃飯時間及平常的耍廢時光,到重要關頭的論文撰寫、口試,都有你 們的陪伴與共同成長。感謝學弟世宗、學妹貽淂、怡如陪我們一起耍廢、聊天,以 及對於實驗室事務的幫忙。感謝MMT 的夥伴們讓我的實驗室生活非常精采。
感謝我親愛的家人們,感謝父母多年來的養育以及栽培使我成為現在的樣子,
並且在我大學延畢時給我充分的信任以及毫無保留的支持,讓我無後顧之憂地完 成學業;感謝女友芷融在我求學期間的陪伴以及包容,未來還要繼續一起加油。
最後感謝所有對我曾經提供幫助與建議的人們,謹以此文向你們致上謝意,並 且與你們分享完成這份論文的喜悅。
一種具混合動力功能的扭力分配差速器 之理念設計與分析
林承楷
摘要
本研究提出一種以馬達調控,而同時具備混合動力功能的扭力分配差速器
(Hybrid Torque-vectoring Differential, H-TD)。本研究所提出之扭力分配差速器是 以一般開放式差速器為基礎搭配行星齒輪組、馬達、煞車以及離合器,來同時達成 混合動力與扭力分配之功能。此機構可以馬達將輸入至差速器之主動力於兩輸出 軸之間分配,亦可以馬達之動力與主動力形成同時輸出之混合動力功能。本研究首 先提出H-TD 之概念原型,並且以機構拓樸搜尋一定範圍內所有可能之構型,以找 到最佳的機構組合。接著本研究提出此機構的空間布局方式,以及此系統之操作模 式與模式切換策略。接下來以最佳化之方式設定H-TD 之細部設計參數,以完成一 可行設計。完成機構參數設計後,本研究討論H-TD 在一般四輪車輛上的動力總成 配置,最後推導各種動力總成配置下的車輛動力分配動態模型。完成系統之設計後,
本研究將以數值模擬程式進行分析,程式包含可替換之駕駛模型、動力分配模型、
輪胎模型、車輛模型,以求得不同操作情形與環境下之車輛動態表現。模擬情境包 含單輪打滑、定轉角轉向、轉向時單輪打滑、加速打滑、混合動力加速、混合動力 回充等情境。結果顯示本研究提出之 H-TD 可在車輛遭遇打滑時保有較佳的驅動
力、轉向時提升車輛之轉向能力,並且在混合動力模式下,為車輛提供更佳的動力表
現或者更多元的能量管理方式。
關鍵字:機構拓樸、扭力分配、混合動力、最佳化設計、車輛力學模型、數值模擬 分析
Conceptual Design and Analysis of a Torque Vectoring Differential with Electric Hybrid Functionality
Cheng-Kai Lin
Abstract
A motor-controlled torque-vectoring differential with electric hybrid functionality (Hybrid Torque-vectoring Differential, H-TD) is proposed in this study. The structure of H-TD is based on an open differential with a planetary gear set, an electric motor, a clutch brake, and a clutch to achieve both torque-vectoring and hybrid functionality. The mechanism can utilize electric motor to distribute torque between two output shafts, or use motor to provide additional power. This study first comes up with a conceptual prototype of H-TD, then uses mechanism topology to search all possible configurations within a certain range to find the best-suited mechanism for the system. Next, this study presents a conceptual spatial layout for the system, and proposes the operation modes of the system, as well as the control strategy. Afterwards, this study uses optimum design method to obtain design parameters of the system. Following is discussion about possible powertrain configurations of H-TD on four-wheeled vehicles, and derivation of the dynamic model for each configuration. After completing the conceptual design of H-TD, this study uses a numerical simulation program, which includes a replaceable driver model, a power distribution model, a tire model, and a vehicle dynamic model, to obtain vehicle dynamic performance under different system operating modes and driving situations. The simulation scenarios include single wheel slipping while driving, constant cornering, single-wheel-slip constant cornering, slipping during acceleration, hybrid power acceleration, and hybrid regenerative mode. Simulation results show that H-TD proposed in this study is capable of maintaining better tractive force when the vehicle encounters slipping, and improving the cornering performance. In addition, H-TD can provide better power performance and energy management due to its hybrid functionality.
Key words: mechanism topology, torque vectoring, hybrid power, optimum design, vehicle dynamic model, numerical simulation
目錄
口試委員會審定書 ... i
誌謝 ... ii
摘要 ... iii
Abstract ... iv
目錄 ... v
圖目錄 ... ix
表目錄 ... xvi
符號彙整 ... xviii
第一章 緒論 ... 1
1-1 前言 ... 1
1-2 文獻回顧 ... 2
1-2-1 扭力分配系統 ... 2
1-2-2 混合動力系統 ... 4
1-2-3 小結 ... 5
1-3 研究動機與目的 ... 6
1-4 研究方法與論文架構 ... 6
第二章 理論基礎 ... 8
2-1 圖論之基本概念 ... 8
2-2 行星齒輪組之運動與力學關係 ... 8
2-3 差速器之運動與力學關係 ... 11
2-4 扭力分配系統之背景概念 ... 13
2-4-1 離合器動力傳遞特性 ... 13
2-4-2 限滑差速器 ... 14
2-4-3 能任意分配扭力之差速器概念 ... 15
2-5 功能動力圖論方法 ... 16
2-6 車輛動態模型 ... 17
2-6-1 車輛座標 ... 18
2-6-2 車輛受力分析 ... 18
2-6-3 阿克曼轉向幾何 ... 20
2-6-4 平面車輛動態方程式 ... 22
2-6-5 車輪之速度 ... 24
2-7 輪胎模型 ... 25
2-7-1 輪胎座標系定義 ... 25
2-7-2 輪胎受力與力矩 ... 25
2-7-3 輪胎滑差與驅動力 ... 26
2-7-4 輪胎側滑角與側向力 ... 29
2-7-5 Magic Formula ... 30
2-7-6 車輪動態模型 ... 33
第三章 H-TD 概念原型及機構合成與選用 ... 34
3-1 以馬達調控之扭力分配差速器 ... 34
3-2 一般差速器與行星齒輪組搭配之機構合成 ... 35
3-3 系統動力元件之配置規則 ... 38
3-4 選用構型之設計規則 ... 41
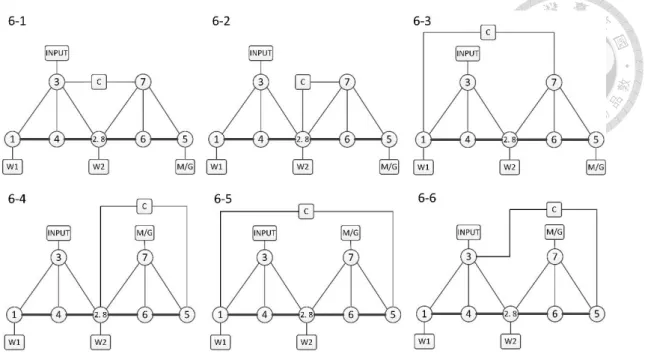
3-5 根據定性分析選擇最適合之構型 ... 45
3-6 小結 ... 58
第四章 H-TD 機構實體化與設計參數設定 ... 59
4-1 H-TD 之機構實體化 ... 59
4-2 H-TD 之操作模式與模式切換邏輯 ... 62
4-3 H-TD 之設計參數設定 ... 65
4-3-1 H-TD 各操作模式之力學與運動方程式 ... 66
4-3-2 機構之不對稱性與設計改善方案選定 ... 72
4-3-3 機構傳動系數值設定之最佳化問題 ... 75
4-3-4 輔助馬達、離合器、煞車參數之設定方法 ... 81
4-4 H-TD 之車輛配置討論 ... 83
4-5 整車數學模型建立 ... 85
4-5-1 前輪驅動車輛模型 ... 86
4-5-2 後輪驅動車輛模型 ... 87
4-5-3 四輪驅動車輛模型 ... 89
4-6 小結 ... 92
第五章 整車動態數值分析 ... 93
5-1 車輛動態數值模擬流程 ... 93
5-2 車輛參數設定 ... 95
5-2-1 車輛規格 ... 95
5-2-2 輪胎規格 ... 96
5-3 扭力分配功能模擬分析 ... 98
5-3-1 前輪驅動車輛之分析 ... 98
5-3-2 後輪驅動車輛之分析 ... 110
5-3-3 四輪驅動車輛之分析 ... 121
5-4 混合動力功能模擬分析 ... 125
5-4-1 混合動力加速 ... 125
5-4-2 混合動力回充模式 ... 128
5-5 H-TD 系統其他模擬分析 ... 131
5-6 H-TD 馬達作動狀態整理 ... 133
5-7 小結 ... 134
第六章 結論 ... 135
6-1 結論 ... 135
6-2 未來展望 ... 136
參考文獻 ... 137
附件 最佳化 1000 組結果 ... 142
附錄 車輛動態數值模擬程式 ... 167
圖目錄
圖 2-1 行星齒輪組示意圖[29]以及機構簡圖 ... 9
圖 2-2 行星齒輪組機構受力自由體圖 ... 9
圖 2-3 一般差速器構造[30]與其機構簡圖 ... 11
圖 2-4 一般差速器受力模型 ... 12
圖 2-5 差速器各桿件自由體圖 ... 12
圖 2-6 離合器力學關係圖 ... 14
圖 2-7 主動式限滑差速器架構(Gerodisc type Differential) [34] ... 15
圖 2-8 可任意分配扭力系統概念圖[8] ... 15
圖 2-9 可任意分配扭力系統概念之力學模型 ... 16
圖 2-10 車輛座標系統[35] ... 18
圖 2-11 車輛受力圖 ... 19
圖 2-12 車輛前輪軸受力圖(後視圖) ... 19
圖 2-13 阿克曼轉向幾何[36] ... 20
圖 2-14 阿克曼轉向幾何之側滑角 ... 21
圖 2-15 瞬心計算示意圖 ... 21
圖 2-16 三自由度車輛動態模型 ... 22
圖 2-17 坐標系旋轉示意圖 ... 22
圖 2-18 車體平面受力圖 ... 24
圖 2-19 輪胎座標系統[36] ... 26
圖 2-20 輪胎受驅動力矩時的行為[36] ... 27
圖 2-21 輪胎受煞車力矩時的行為[36] ... 27
圖 2-22 驅動力與滑差關係[36] ... 28
圖 2-23 卡車於不同正向力下煞車力與滑差關係[36] ... 28
圖 2-24 輪胎受側向力之變形與受力關係[36] ... 29
圖 2-25 轉向力(側向力)與側滑角的關係[36] ... 29
圖 2-26 轉向力(側向力)與側滑角以及正負載的關係[36] ... 30
圖 2-27 轉向力(側向力)與側滑角的關係[36] ... 30
圖 2-28 Magic Formula 特性曲線與方程式參數關係[36] ... 31
圖 2-29 不同正向力下側向力與側滑角關係曲線 ... 32
圖 2-30 不同正向力下縱向力與滑差關係曲線 ... 32
圖 2-31 車輪受力模型 ... 33
圖 3-1 使用馬達之扭力分配差速器示意圖[18] ... 34
圖 3-2 使用馬達之扭力分配差速器之功能動力圖 ... 34
圖 3-3 H-TD 概念原型之功能動力圖 ... 35
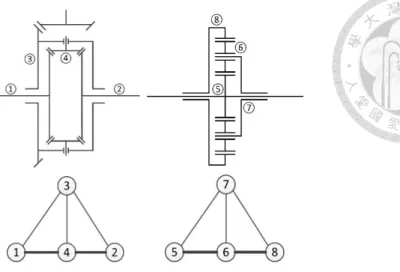
圖 3-4 差速器與行星齒輪組基本圖畫 ... 36
圖 3-5 合併圖畫 Case A、B、C ... 36
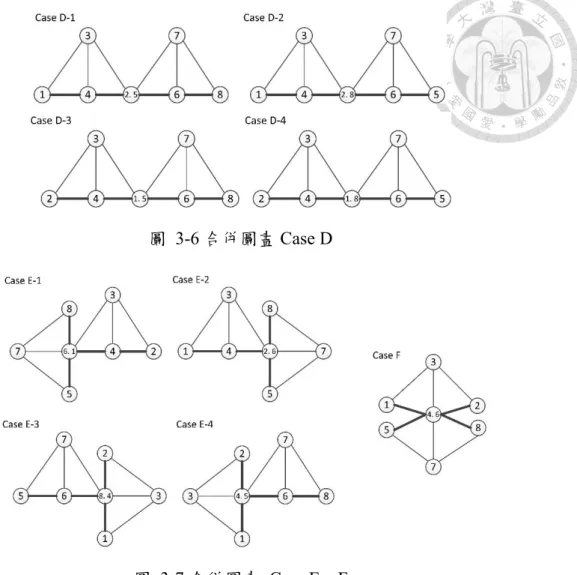
圖 3-6 合併圖畫 Case D ... 37
圖 3-7 合併圖畫 Case E、F ... 37
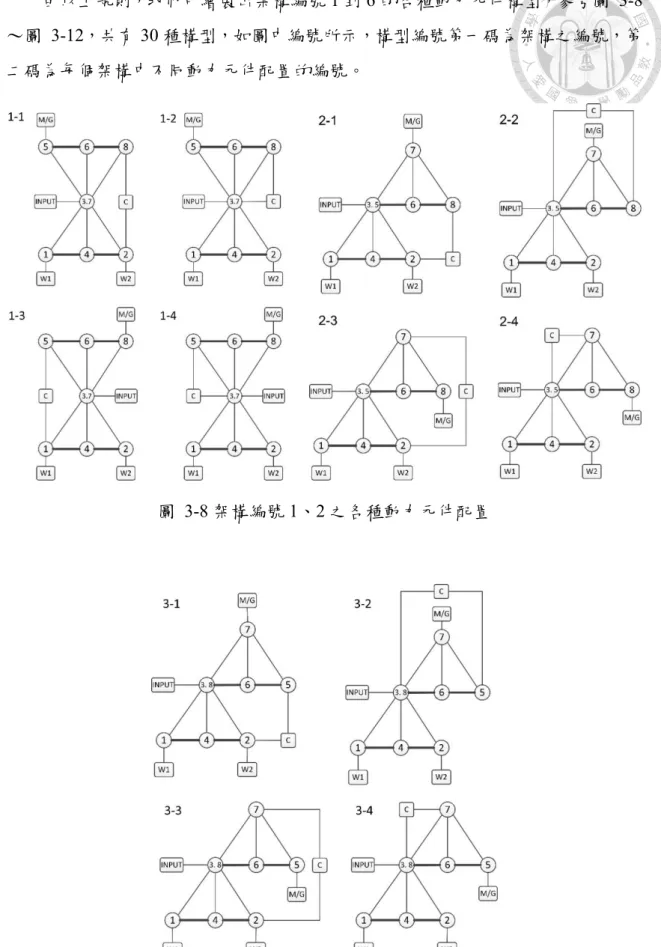
圖 3-8 架構編號 1、2 之各種動力元件配置 ... 39
圖 3-9 架構編號 3 之各種動力元件配置 ... 39
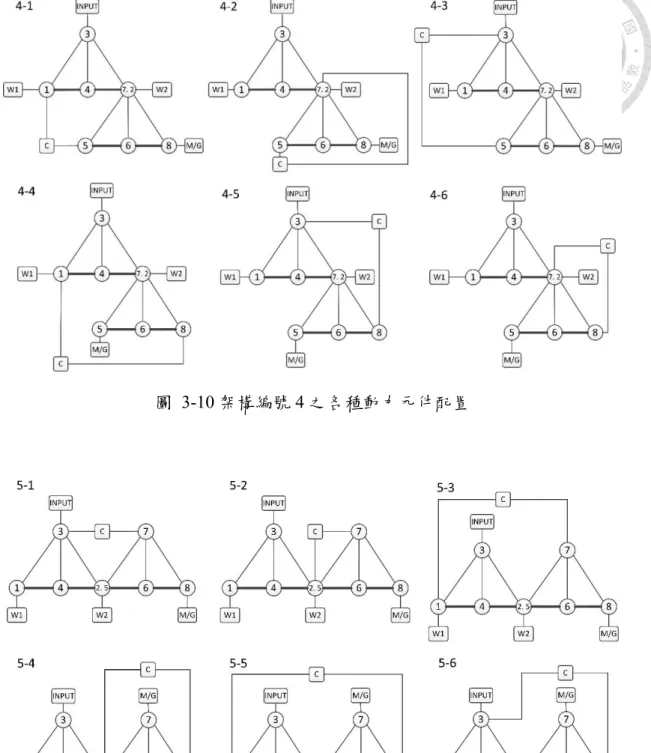
圖 3-10 架構編號 4 之各種動力元件配置 ... 40
圖 3-11 架構編號 5 之各種動力元件配置 ... 40
圖 3-12 架構編號 6 之各種動力元件配置 ... 41
圖 3-13 系統功能設計要求示意圖 ... 42
圖 3-14 H-TD 概念 1 ... 42
圖 3-15 H-TD 概念 1(修改) ... 43
圖 3-16 H-TD 概念 2 ... 43
圖 3-17 H-TD 概念 2(修改) ... 44
圖 3-18 H-TD 概念 3 ... 44
圖 3-19 構型 1-1 ... 45
圖 3-20 構型 1-1(修改) ... 46
圖 4-1 H-TD 機構實體化(1) ... 59
圖 4-2 離合器機構配置示意圖 ... 61
圖 4-3 H-TD 機構實體化(2) ... 61
圖 4-4 H-TD 機構實體化(3) ... 61
圖 4-5 馬達減速機構配置示意圖 ... 62
圖 4-6 H-TD 機構實體化(4) ... 62
圖 4-7 H-TD 功能動力圖 ... 62
圖 4-8 混合動力模式動力流示意圖 ... 63
圖 4-9 扭力分配模式動力流示意圖 ... 63
圖 4-10 中介模式動力流示意圖 ... 64
圖 4-11 H-TD 操作模式切換邏輯示意圖 ... 65
圖 4-12 H-TD 機構桿件編號圖 ... 66
圖 4-13 混合動力模式系統自由體圖 ... 67
圖 4-14 中介模式系統自由體圖 ... 68
圖 4-15 扭力分配模式系統自由體圖 ... 70
圖 4-16 扭力分配之理想狀況 ... 73
圖 4-17 設計改善方案ㄧ ... 73
圖 4-18 設計改善方案二 ... 73
圖 4-19 前輪驅動 H-TD 配置可能 ... 83
圖 4-20 後輪驅動 H-TD 配置可能 ... 84
圖 4-21 四輪驅動 H-TD 配置可能 ... 85
圖 5-1 數值模擬程式架構 ... 94
圖 5-2 數值模擬程式運算流程 ... 94
圖 5-3 正向力 3000N 時 235/60 R16 輪胎之滑差與縱向力曲線 ... 96
圖 5-4 正向力 3000N 時 235/60 R16 輪胎之側滑角與側向力曲線 ... 97
圖 5-5 總驅動力比較 ... 99
圖 5-6 各輪驅動力比較 ... 99
圖 5-7 各輪滑差比較 ... 99
圖 5-8 各輪角加速度比較 ... 100
圖 5-9 H-TD 馬達轉速 ... 100
圖 5-10 H-TD 馬達功率 ... 101
圖 5-11 Yaw rate 比較 ... 101
圖 5-12 車體移動路徑比較 ... 101
圖 5-13 OD 各輪驅動力變化 ... 102
圖 5-14 H-TD 各輪驅動力變化(-45Nm) ... 102
圖 5-15 H-TD 各輪驅動力變化(45Nm) ... 103
圖 5-16 OD 各輪滑差變化 ... 103
圖 5-17 H-TD 各輪滑差變化(-45Nm) ... 104
圖 5-18 H-TD 各輪滑差變化(45Nm) ... 104
圖 5-19 OD 各輪角速度變化 ... 104
圖 5-20 H-TD 各輪角速度變化(-45Nm) ... 105
圖 5-21 H-TD 各輪角速度變化(45Nm) ... 105
圖 5-22 OD 各輪角加速度變化 ... 105
圖 5-23 H-TD 各輪角加速度變化(-45Nm) ... 106
圖 5-24 H-TD 各輪角加速度變化(45Nm) ... 106
圖 5-25 H-TD 馬達轉速比較 ... 106
圖 5-26 H-TD 馬達功率比較 ... 107
圖 5-27 Yaw rate 比較 ... 107
圖 5-28 瞬時迴轉半徑比較 ... 108
圖 5-29 車體移動路徑比較 ... 108
圖 5-30 前驅單輪打滑轉向車體路徑比較 ... 109
圖 5-31 總驅動力比較 ... 110
圖 5-32 各輪驅動力比較 ... 111
圖 5-33 各輪滑差比較 ... 111
圖 5-34 各輪角加速度比較 ... 111
圖 5-35 H-TD 馬達轉速 ... 112
圖 5-36 H-TD 馬達功率 ... 112
圖 5-37 Yaw rate 比較 ... 112
圖 5-38 車體移動路徑比較 ... 113
圖 5-39 OD 各輪驅動力變化 ... 114
圖 5-40 H-TD 各輪驅動力變化(-45Nm) ... 114
圖 5-41 H-TD 各輪驅動力變化(45Nm) ... 114
圖 5-42 OD 各輪滑差變化 ... 115
圖 5-43 H-TD 各輪滑差變化(-45Nm) ... 115
圖 5-44 H-TD 各輪滑差變化(45Nm) ... 115
圖 5-45 OD 各輪角速度變化 ... 116
圖 5-46 H-TD 各輪角速度變化(-45Nm) ... 116
圖 5-47 H-TD 各輪角速度變化(45Nm) ... 116
圖 5-48 OD 各輪角加速度變化 ... 117
圖 5-49 H-TD 各輪角加速度變化(-45Nm) ... 117
圖 5-50 H-TD 各輪角加速度變化(45Nm) ... 117
圖 5-51 H-TD 馬達轉速比較 ... 118
圖 5-52 H-TD 馬達功率比較 ... 118
圖 5-53 Yaw rate 比較 ... 119
圖 5-54 瞬時迴轉半徑比較 ... 119
圖 5-55 車體移動路徑比較 ... 119
圖 5-56 後驅單輪打滑轉向車體路徑比較 ... 120
圖 5-57 前後軸差速器輸入扭力比較 ... 121
圖 5-58 OD 各輪正向力、打滑狀態 ... 122
圖 5-59 H-TD 各輪正向力、打滑狀態 ... 122
圖 5-60 前後軸總驅動力比較 ... 123
圖 5-61 總驅動力比較 ... 123
圖 5-62 OD 各輪滑差變化 ... 123
圖 5-63 H-TD 各輪滑差變化 ... 124
圖 5-64 H-TD 馬達轉速 ... 124
圖 5-65 H-TD 馬達功率 ... 124
圖 5-66 車體縱向速度變化 ... 125
圖 5-67 各動力元件扭力變化 ... 126
圖 5-68 前後軸差速器輸入扭力變化 ... 126
圖 5-69 總驅動力變化 ... 127
圖 5-70 各輪正向力變化 ... 127
圖 5-71 H-TD 馬達轉速 ... 127
圖 5-72 H-TD 馬達功率 ... 128
圖 5-73 車身縱向速度變化 ... 128
圖 5-74 各動力元件扭力變化 ... 129
圖 5-75 前後軸差速器輸入扭力變化 ... 129
圖 5-76 總驅動力變化 ... 130
圖 5-77 車身縱向速度變化 ... 130
圖 5-78 H-TD 馬達功率變化 ... 130
圖 5-79 前驅車 H-TD 位置差異之車體路徑比較 ... 131
圖 5-80 後驅車 H-TD 位置差異之車體路徑比較 ... 132
圖 5-81 前輪驅動車輛直線測試車輛軌跡圖 ... 132
圖 5-82 後輪驅動車輛直線測試車輛軌跡圖 ... 133
表目錄
表 2-1 功能動力圖之說明 ... 17
表 3-1 架構重新編號規則 ... 38
表 3-2 動力元件符號 ... 38
表 3-3 各桿件之符號定義 ... 46
表 3-4 構型 1-1 定性分析結果 ... 50
表 3-5 構型 1-3 定性分析結果 ... 51
表 3-6 構型 2-1 定性分析結果 ... 51
表 3-7 構型 2-3 定性分析結果 ... 52
表 3-8 構型 3-1 定性分析結果 ... 52
表 3-9 構型 3-3 定性分析結果 ... 53
表 3-10 構型 4-1 定性分析結果 ... 53
表 3-11 構型 4-4 定性分析結果 ... 54
表 3-12 構型 5-3 定性分析結果 ... 54
表 3-13 構型 5-5 定性分析結果 ... 55
表 3-14 構型 6-3 定性分析結果 ... 55
表 3-15 構型 6-5 定性分析結果 ... 56
表 3-16 扭力分配時各構型馬達輸出扭力差異 ... 57
表 3-17 混合動力時各構型單輪軸獲得扭力差異 ... 57
表 4-1 系統設計參數最佳化結果 ... 81
表 5-1 CS D-Class SUV 車輛規格參數 ... 95
表 5-2 CS GT 車輛規格參數 ... 96
表 5-3 CS B-Class Sports Car 車輛規格參數 ... 96
表 5-4 235/60 R16 輪胎縱向力參數 ... 97 表 5-5 235/60 R16 輪胎側向力參數 ... 97 表 5-6 H-TD 於扭力分配模式各種狀態下馬達之作動狀態 ... 133
符號彙整
A 車輛前投影面積(m2) d 車輛輪距(m)
𝐹𝑛1𝐿 左前輪正向力(N) 𝐹𝑛1𝑅 右前輪正向力(N) 𝐹𝑛2𝐿 左後輪正向力(N) 𝐹𝑛2𝑅 右後輪正向力(N) 𝐹𝑥1𝐿 左前輪縱向力(N) 𝐹𝑥1𝑅 右前輪縱向力(N) 𝐹𝑥2𝐿 左後輪縱向力(N) 𝐹𝑥2𝑅 右後輪縱向力(N) 𝐹𝑦1𝐿 左前輪側向力(N) 𝐹𝑦1𝑅 右前輪側向力(N) 𝐹𝑦2𝐿 左後輪側向力(N) 𝐹𝑦2𝑅 右後輪側向力(N) 𝑔 重力加速度(m/s2)
ℎ 車輛質心距地面高度(m) 𝐼𝑤 輪胎轉動慣量(kgm2)
𝐼𝑧 車輛對z 軸之轉動慣量(kgm2) 𝑖 加速滑差(ratio)
𝑖′ 減速滑差(ratio) 𝑙 車輛軸距(m)
𝑙1 車輛質心至前輪軸距離(m)
𝑙2 車輛質心至後輪軸距離(m) 𝑚 車重(kg)
𝑅𝑎 空氣阻力(N) 𝑅𝑟 滾動阻力(N)
𝑟𝑒 輪胎滾動有效半徑(m) 𝜏𝑖𝑛 主動力源提供之扭力(Nm)
𝜏𝑖𝑛_𝑓 中央差速器前軸輸出軸扭力(Nm) 𝜏𝑖𝑛_𝑟 中央差速器後軸輸出軸扭力(Nm) 𝜏𝑇𝑀 馬達1 提供之扭力(Nm)
𝑢 車輛縱向速度(m/s) 𝑢̇ 車輛縱向加速度(m/s2) 𝑣 車輛側向速度(m/s) 𝑣̇ 車輛側向加速度(m/s2) α𝑓𝑙 左前輪側滑角(rad) α𝑓𝑟 右前輪側滑角(rad) α𝑟𝑙 左後輪側滑角(rad) α𝑟𝑟 右後輪側滑角(rad) 𝜌 空氣密度(kg/m3) δ𝑓𝑙 左前輪轉向角(rad) δ𝑓𝑟 右前輪轉向角(rad)
𝜔̇𝑖𝑛 主動力源角加速度(rad/s2)
𝜔̇𝑖𝑛_𝑓 中央差速器前軸輸出軸角加速度(rad/s2) 𝜔̇𝑖𝑛_𝑟 中央差速器後軸輸出軸角加速度(rad/s2)
𝜔̇𝑇𝑀 馬達之角加速度(rad/s2) 𝜔̇1𝐿 左前輪角加速度(rad/s2) 𝜔̇1𝑅 右前輪角加速度(rad/s2) 𝜔̇2𝐿 左後輪角加速度(rad/s2) 𝜔̇2𝑅 右後輪角加速度(rad/s2)
第一章 緒論
1-1 前言
在車輛的動力傳動系統之演進過程中,最早出現的是實軸(Solid axle),實軸 為左右輪軸直接相接,因此兩者會同步運動;而當汽車轉向時,內、外側輪因為不 同的行進軌跡,理論上內側與外側輪必須以不同的轉速過彎,但因實軸本身限制了 內側與外側輪無法以不同轉速同時旋轉,車輛過彎時輪胎將出現不必要的磨耗與 打滑,工程師為了解決此一問題,發展出了差速器,透過差速器的機構,使得內外 側輪的轉速在轉向時可以不同,減少輪胎打滑磨耗的產生。
一般差速器讓左右側輪軸可以有不同轉速,但並無法處理車輪遇低摩擦力地 面時打滑的情況,因此後續又有限滑式差速器(Limited-slip differential)的出現,
然而限滑式差速器只能將扭力從較高速之輪軸傳至較低速之輪軸,雖然可解決車 輪打滑的問題但並無法主動且任意分配扭力至各輪軸,車輛性能在某些情況下將 因此受到限制。
接下來,為了進一步提升車輛之性能又發展出了扭力分配差速器(Torque- vectoring differential),直至目前為止已出現過許多不同構型之扭力分配差速器,利 用離合器、馬達、行星齒輪組或者各種不同機構之組合來控制扭力的分配。本研究 將參考前人發展之扭力分配差速器機構,並且以機構拓樸之方式發展一種同時具 備混合動力之功能的扭力分配差速器,後續將以Hybrid Torque-vectoring Differential
(縮寫為H-TD)為名對本研究所提出之新型扭力分配差速器進行簡稱。
完成H-TD 之概念設計後,本研究將分別以前輪驅動車輛、後輪驅動車輛、以 及四輪驅動車輛為例,提出此系統於一般四輪車輛上之可能配置方式,並且進行比 較與分析,討論此系統對於車輛之駕駛性能的影響、以及整合混合動力之能力。
1-2 文獻回顧 1-2-1 扭力分配系統
回顧車輛之動力傳動系統的發展歷程,開放式差速器於1827 年首次被應用於 車輛上[1],一般差速器於正常之地面狀況下,會平均將驅動扭力分配於左右輪,並 且透過行星齒輪之機構使左右輪可以不同轉速旋轉,使過往使用實軸之車輛轉向 時輪胎打滑情況大幅減少,因此能減少能量損失,並且增加車輛之性能。在一般狀 況下輪胎未打滑時,開放式差速器幾乎可以達到所有需求,但當路面因濕滑、結冰、
或是泥濘而摩擦力下降時,如果其中一輪摩擦力過低而開始打滑,將造成總驅動力 下降,且因差速器之機構特性,打滑輪側開始空轉,並且造成未打滑側的輪軸失去 加速度,進而失去驅動力[2]。
為了改善開放式差速器此一弱點,德國ZF 公司於 1935 年推出了限滑式差速 器(Limited-slip differential, LSD)[3],此差速器使用機械式機構,使差速器於其中 一輪軸打滑時可以自行鎖定,但因機械式機構而無法及時調整機構鎖定之條件。另 外,美國 Dana Incorporated 於 2004 年提出了電子式限滑差速器(Electronically Controlled Limited-slip Differential, ELSD)[4],有別於機械式之構型,電子式構型 可即時調整鎖定條件,然而限滑式差速器的運作模式仍然只能適用於打滑時,機構 將高轉速輪之扭力透過離合器等元件傳遞至低轉速輪,並無法以相反方向任意分 配扭力至高轉速輪。
另一方面,美國的Eaton Corporation[5]提到偏擺角速度(yaw rate)是作為控 制車輛穩定的依據之一,控制車體偏擺角速度可以確保車輛朝向預期的方向行駛,
以改善過度轉向(oversteering)以及轉向不足(understeering)之轉向狀況,車輛 可透過蒐集輪軸轉速、旋轉角速度、輪胎轉向角度、油門閥等等資訊,再透過可以 調整偏擺角速度之系統來改善行車穩定、增加車輛性能。
1996 年日本 Mitsubishi Motors 提出 Active Yaw Control(AYC)[6]系統,此系 統以兩組打滑式離合器(slip clutch)分別搭配以齒輪系組成之增、減速機構,可視 行駛狀況控制車輛左右側輪之扭力分配,除了解決開放式差速器的打滑問題,也可 控制轉向時車身之動態,進一步提升車輛性能。2003 年 Mitsubishi Motors 提出 Super Active Yaw Control(S-AYC)[7]系統,此系統以 AYC 為基礎,將其中的離合器與
減速機構之連接位置進行調整,並且將AYC 中使用的一般差速器機構更改為行星 齒輪式差速機構,因此獲得更大之扭力調整幅度。
2008 年 Politecnico di Milano 和 GTV Vehicle Dynamics[8]做了一份以獨立煞車 作扭力分配對車輛性能改善的研究,此研究顯示以煞車控制yaw moment 來改善性 能車輛的駕駛性能是可行的,透過兩側輪獨立之煞車控制,控制車輪縱向力。不過 以煞車控制將造成無法避免的能量損耗。
2004 年美國 Dana Incorporated[9]提出了一款扭力分配差速器(Torque Vectoring Differential, TVD),此機構以限滑差速器為基礎,並在左右輪輸出軸各自以離合器 控制輸出至輪端的扭力。
2005 年日本 Mitsubishi Motors 提出 Super All Wheel Control(S-AWC)[10]系 統,此系統整合了 Mitsubishi Motors 所自行發展之 Active Center Differential (ACD)[11]、Active Yaw Control(AYC) [6]、Active Stability Control(ASC)[12]、
以及 Antilock Brake System(ABS),透過此系統整合車輛縱向以及橫向之扭力分 配以及煞車控制,來對車輛進行全方位之動態控制,Mitsubishi Motors 宣稱 S-AWC 系統可有效提升車輛之驅動、轉向性能、以及車輛之穩定性。
2005 年日本 Honda Motor Company 提出了 Super Handling-All Wheel Drive[13]
(SH-AWD),此系統所使用的扭力分配差速器並無一般差速器構型存在,但具備 差速以及扭力分配功能,其機構大致為中央以一組傘齒輪機構接收引擎動力,另於 左右輪軸各裝置一組多片式離合器搭配行星齒輪組,並且以離合器獨立控制輸入 至左右輪軸之扭力。
2011 年德國 Audi 的車系 A6 使用了名為 Sport Differential[14]的扭力分配差速 器,其使用增速機構,以及兩組以液壓控制的打滑式離合器連接兩端輸出軸,並以 此控制增速機構傳遞扭力的多寡,因此具備扭力分配的能力。
2012 年日本 Honda Motor Company 以 SH-AWD 為基礎,提出了 Sport Hybrid Super Handling-All Wheel Drive[15](Sport Hybrid SH-AWD),不同於先前之 SH- AWD,系統中的 Twin Motor Unit 使用兩顆獨立控制之馬達透過行星齒輪減速機構 以及單向離合器之作用,分別輸出動力至左右輪軸,此系統不僅具備差速以及扭力
2016 年陳羿名[16]發展出功能動力圖(Function Power Graph)方法,並用其分 析了幾種扭力分配差速器的運動關係,簡易的表示出元件間的動力傳遞關係。
2016 年李東原[17]將目前幾種包含離合器之扭力分配差速器進行分類,並探 討其特性之差異,可得知若完全以離合器之接合狀態來調整扭力而不使用差速器,
會有較大的能量損耗。
2016 年 Čavić[18]提出一種以單顆馬達控制之扭力分配差速器,藉由馬達之扭 力將左右輪的扭力進行增減來達成扭力分配。
2017 年宋仁正[19]根據 Čavić 所提出之 TVD 構型進行改良,建構以馬達調控 之扭力分配差速器,並提出一種應用於四輪驅動車輛之系統配置方式。
1-2-2 混合動力系統
廣義上來說,任何具備兩種以上動力來源的動力系統皆可稱之混合動力系統,
一般較常見之混合動力系統為結合電力驅動及內燃機引擎動力的油電混合系統 [20]。最早的應用出現在約 19 世紀末,當時車輛普遍為電動車,內燃機引擎剛發 明不久。由於當時的電池電容量小,車輛的續航力不足,因此以燃油作為燃料的引 擎發明是車輛動力的一大突破。然而內燃機引擎技術在當時尚未成熟,為了度過此 過渡階段,因而產生了油電混合車的概念[21]。
隨著時間以及環境的演進,車輛工業蓬勃發展且絕大多數車輛都以石化燃料 作為能量來源,直至近年石化燃料之儲存量似乎在可預見的未來即將用罄,且全球 對於環境保護之議題更加重視,各國政府開始訂定愈趨嚴格的排放法規,因此車輛 工業開始著手引擎之能耗改善以及碳排放量之降低,並且朝向電動車輛發展,但在 電池系統尚無法完全滿足車輛續航力之要求時,各大車廠均推出混合動力車輛作 為過渡時期之替代方案,以電動馬達作為車輛之輔助甚至主要動力來源,同時提升 車輛整體之能源效率,目前已大量應用於產品上販售之油電混合系統包含日本 Toyota 的 Toyota Hybrid System(THS)[22]、日本 Honda 的 intelligent Dual Clutch Drive(i-DCD)[23]、intelligent Multi Mode Drive(i-MMD)[24]、美國 General Motors 的Two mode[25]等等。
另一方面,除了增加能源使用效率以達成環保之目的,混合動力系統亦可藉由 兩個以上之動力源提升車輛整體之性能表現。
2009 年,德國 BMW 發表油電混合跑車 i8[26],以前軸電力驅動、後軸引擎驅 動之混合動力架構增強車輛之驅動性能。
2014 年,瑞典 Volvo 提出 Twin Engine Hybrid 油電混合動力系統[27],後軸以 馬達純電驅動,前軸以內燃機引擎搭配大功率啟動馬達,以外加之兩馬達提供車輛 更好的性能表現。
2015 年,日本 Honda 的超級跑車 NSX 採用 Sport Hybrid SH-AWD 混合動力架 構[15],前軸以由兩顆馬達組成之 Twin Motor Unit 驅動,後軸則以內燃機引擎搭 配一馬達驅動,形成三馬達之混合動力架構,其中前軸之Twin Motor Unit 除了可 提供扭力分配之功能,更可以雙馬達與後軸之引擎動力形成混合動力系統,因此擁 有卓越性能。
1-2-3 小結
由過往文獻以及市場產品回顧,可以發現扭力分配系統與動力混合系統皆為 目前車輛之趨勢之一,而目前一般扭力分配之作法可分為以下幾種:
1. 以獨立煞車控制進行扭力調整。
2. 以機構搭配離合器接合狀態調整之扭力分配差速器。
3. 僅以離合器控制扭力傳遞的大小,而無一般差速器之存在。
4. 以兩組獨立馬達經減速直接決定兩輸出軸扭力傳遞。
5. 以馬達調控之扭力分配差速器。
綜觀目前已出現過之扭力分配系統,上述作法1、2、3 皆因煞車或離合器之持 續作動而出現較大的能量損耗,作法 4 能夠同時結合扭力分配以及混合動力之功 能,但該系統必須使用兩組馬達,且控制複雜,目前僅有高價位車款搭配此系統,
另作法 5 僅利用一組馬達便可達成扭力分配之功能,但並不能有效利用馬達之動 力達成混合動力之要求。
1-3 研究動機與目的
扭力分配系統之目的為主動分配不同的動力至不同車輪上,使車輛具備防滑 能力、或是透過控制車體偏擺角速度(yaw rate)來獲得更好的車體操控性能,目 前的研究已提出相當多構型,但大多數皆停留在具備扭力分配功能之構型,也就是 使一輸出軸動力上升、另一輸出軸動力下降之狀態,並無法達成以一外加動力源同 時使兩輸出軸動力上升或下降,也就是混合動力的功能。因此本研究將以用單顆馬 達調控之扭力分配差速器作為基礎,嘗試以機構拓樸之方式生成具備混合動力功 能之扭力分配差速器系統(Hybrid Torque-vectoring, H-TD),並且提出系統之操作 模式以及整車配置方式。完成設計後以數值模擬驗證系統之功能,並在分析過程中 加入角加速度,以擬穩態(quasi-steady)之方式呈現機構之動態關係。
1-4 研究方法與論文架構
本研究首先針對Čavić 的以馬達調控之扭力分配差速器[18]進行說明,透過陳 羿名所提出之功能動力圖方法[16]進行系統之動力流向分析,之後根據分析結果,
提出可整合混合動力功能的扭力分配差速器概念原型,並且以機構拓樸的方式,嘗 試生成所有機構之組合並找出最佳之配置後,將機構實體化,並設定系統之操作模 式、模式切換策略、細部設計參數,接下來提出此扭力分配差速器於四輪車輛上可 能之配置方法,最後以模擬程式分析其特性,整個過程可以分成六個章節。
第一章簡述本文研究主題、對先前文獻之回顧與探討、以及本文研究動機與目 的,最後說明研究方法與論文架構。
第二章講述研究之理論基礎,介紹圖論的基本概念,推導一般差速器以及行星 齒輪組之力學與運動方程式,簡介扭力分配系統之背景概念、功能動力圖之使用、
車輛受力和運動模型、以及輪胎之力學模型。
第三章討論新型具混合動力功能之扭力分配差速器的機構拓樸與合成,從現 有的馬達調控之扭力分配差速器機構發想,並提出新型機構之概念原型,接下來以 機構拓樸之方式生成所有可能之組合、設置構型選用規則,最後根據定性之分析結 果選擇最適合之構型。
第四章根據第三章得到之最佳構型,開始進行機構之實體化,並且針對系統之 操作模式、細部設計參數等等進行設計,接著討論本系統於四輪車輛上之可能配置,
最後建立各種系統配置之整車數值模型以供後續模擬使用。
第五章首先說明本研究所使用之數值模擬程式模型,以及模擬使用之車輛參 數包含車輛規格、輪胎規格等。接下來建立模擬情境,說明模擬欲比較之項目、指 標等等,並且以圖詳細顯示模擬結果並加以討論。
第六章總結本論文之研究成果,並提出未來可深入發展之方向,以供後續研究 做為參考。
第二章 理論基礎
本章將介紹圖論之基本概念、行星齒輪組及一般差速器的運動與力學關係、
扭力分配系統之背景概念、功能動力圖之使用、車輛受力和運動模型、以及輪胎 之力學模型。
2-1 圖論之基本概念
圖論(Graph theory)被廣泛應用於電子電路、化學、機構運動學等學科,為 一種系統化之解決問題的方法。1964 年,Freudenstein 及 Crossley 皆在機構分析與 合成的研究中導入圖論之概念,將機構中的連桿及運動對分別以點和線來表示,建 立了一套系統性的分析與合成理論,使得圖論成為機構設計的一項有利工具[28]。
相較於機構的運動簡圖表示法,圖畫表示法可以更簡單的判別兩個不同機構 的異同處,並且明確的表達桿件之間的運動關係,同時可以用來做系統化的分類,
對進行機構合成也有很大的幫助。
本研究中,機構的圖畫表示法將使用圓表示桿件,用邊表示運動對,並且以細 邊表示旋轉運動對、粗邊表示齒輪運動對。在圖畫中,所有的邊皆為直線,且不可 相互交叉。
2-2 行星齒輪組之運動與力學關係
如圖 2-1 所示,行星齒輪組(Planetary gear)為常見齒輪結構的一種,通常有 數個行星齒輪(Planet gear)安裝在行星架(Carrier)上並且共同圍繞著一個太陽 齒輪(Sun gear)旋轉。除此之外,行星齒輪組的最外圍通常還有一個環齒輪(Ring gear),用來貼合行星齒輪繞行的軌跡。
圖 2-1 行星齒輪組示意圖[29]以及機構簡圖
參考劉思佳[29]對行星齒輪組之分析,根據其機構運動特性,可以得到兩條行 星齒輪組之運動方程式,如式(2.1)、(2.2)所示(其中𝑟𝑖為桿件 i 之齒輪節圓半徑、
𝜔𝑖為桿件i 的角速度)
𝑟𝑆𝜔𝑆+ 𝑟𝑅𝜔𝑅 = (𝑟𝑆+ 𝑟𝑅)𝜔𝐶 (2.1) (𝑟𝑆+ 𝑟𝑃)𝜔𝐶− 𝑟𝑃𝜔𝑃 = 𝑟𝑆𝜔𝑆 (2.2) 將行星齒輪組各桿件分解後繪製自由體圖如圖 2-2,其中𝐹𝑖/𝑗表示齒輪間桿件 i 對桿件 j 之作用力、𝜔̇𝑖表示桿件i 之角加速度、𝜏𝑖表示桿件i 所受之輸入扭力、𝑟𝑖
表示桿件i 之齒輪節圓半徑、𝑚𝑖表示桿件 i 之質量,𝐼𝑖則代表桿件 i 對其旋轉中心
軸的轉動慣量,此處定義x 進入紙面為正向,y 向左為正向,z 向前為正向。
圖 2-2 行星齒輪組機構受力自由體圖 根據受力圖分析,可得列出各元件之力學方程式如下:
𝜏𝑆− 𝐹𝑃/𝑆× 𝑟𝑆 = 𝐼𝑆× 𝜔̇𝑆 (2.3) 𝐹𝑅/𝑃× 𝑟𝑃 − 𝐹𝑆/𝑃× 𝑟𝑃 = 𝐼𝑃 × 𝜔̇𝑃 (2.4) 𝜏𝐶+ 𝐹𝑃/𝐶× 𝑟𝐶 = 𝐼𝐶× 𝜔̇𝐶 (2.5)
𝜏𝑅− 𝐹𝑃/𝑅× 𝑟𝑅 = 𝐼𝑅 × 𝜔̇𝑅 (2.6) 𝐹𝑅/𝑃 + 𝐹𝑆/𝑃− 𝐹𝐶/𝑃 = 𝑚𝑃 × 𝑟𝐶× 𝜔̇𝐶 (2.7) 接下來假設各桿件在等速運轉的狀態下,系統將處於穩定平衡狀態,因此各桿 件之加速度與角加速度均為零,因此可將式(2.3)~(2.7)重新整理如下:
𝜏𝑆− 𝐹𝑃/𝑆× 𝑟𝑆 = 0 (2.8) 𝐹𝑅/𝑃 × 𝑟𝑃− 𝐹𝑆/𝑃× 𝑟𝑃 = 0 (2.9) 𝜏𝐶+ 𝐹𝑃/𝐶× 𝑟𝐶 = 0 (2.10) 𝜏𝑅− 𝐹𝑃/𝑅× 𝑟𝑅 = 0 (2.11) 𝐹𝑅/𝑃+ 𝐹𝑆/𝑃− 𝐹𝐶/𝑃= 0 (2.12) 由上述方程式可推得在穩定平衡狀態之下,齒輪間內力關係式如下:
𝐹𝑅/𝑃 = 𝐹𝑆/𝑃 = 𝐹 (2.13) 𝐹𝐶/𝑃 = 𝐹𝑅/𝑃+ 𝐹𝑆/𝑃 = 2𝐹 (2.14) 因此可以推得太陽齒輪、行星架、環齒輪在穩定平衡狀態時之扭力關係式如下:
𝜏𝑆: 𝜏𝐶: 𝜏𝑅 = −𝑟𝑆: 2𝑟𝐶: −𝑟𝑅 (2.15) 又根據行星齒輪組之機構特性,可知行星架之齒輪半徑與太陽齒及環齒輪半 徑關係如下:
𝑟𝐶= 𝑟𝑅+ 𝑟𝑆
2 (2.16)
可修改扭力關係式如下:
𝜏𝑆: 𝜏𝐶: 𝜏𝑅 = 1: −𝑟𝑅+ 𝑟𝑆 𝑟𝑆 :𝑟𝑅
𝑟𝑆 (2.17)
由以上推導可知,行星齒輪組在穩定平衡狀態下,三個同軸桿件的扭力將會成 一固定比例,且此比例僅與機構之齒輪半徑有關,與轉速並無關係。
2-3 差速器之運動與力學關係
參考黃靖雄之一般開放式差速器(Open differential)構造[30],如圖 2-3 差速 器由兩個差速小齒輪以及與左右車軸相接的左邊齒輪、右邊齒輪組成,這些齒輪配 置於差速器殼(差速器行星架)內,並互相咬合在一起。當左右輪轉速相同時,介 於中間的差速小齒輪並不轉動,當左右輪軸轉速不相同時,差速小齒輪則開始轉動,
此處機構簡圖將左車軸編號為桿件①、右車軸編號為桿件②、差速器殼(差速器行 星架)編號為桿件③、差速小齒輪編號為桿件④,方便後續討論。
圖 2-3 一般差速器構造[30]與其機構簡圖
為了解其力學特性並建立動態模型,參考Genta and Morello 的分析方式[31],
透過運動學檢視其特性,可將差速器視為一等效之行星齒輪系統,在一般差速器之 情況中,兩輸出軸齒輪可分別對應到太陽齒輪及環齒輪,差速器殼對應到行星架。
參考式(2.1),可知左輪軸、右輪軸、以及差速器殼(差速器行星架)之轉速關 係如下:
𝑟1𝜔1+ 𝑟2𝜔2= (𝑟1+ 𝑟2)𝜔3 (2.18) 由於左右輪軸之軸齒輪齒數必須相等,因此𝑟1 = 𝑟2,將之代入式(2.18),可得 如式(2.19)之轉速關係。在固定差速器行星架之角速度下,𝜔1及𝜔2可以有無限種組 合,因此具有差速功能。
𝜔1+ 𝜔2 = 2𝜔3 (2.19) 將式(2.19)對時間微分可得各齒輪間之角加速度關係如式(2.20):
𝜔̇1+ 𝜔̇2 = 2𝜔̇3 (2.20) 參考Bai[32]之差速器模型,得知可以用力學方程式來分析差速器,參照圖 2-4,定義 x 進入紙面為正向,y 向左為正向,z 向前為正向,令左輪軸(包含軸 本身、軸齒輪、以及輪胎)之轉動慣量為𝐼1、右輪軸之轉動慣量為𝐼2、差速器行 星架之轉動慣量為𝐼3、差速小齒輪的轉動慣量為𝐼4,𝜔̇1、𝜔̇2、𝜔̇3和𝜔̇4分別是左輪 軸、右輪軸、差速器行星架以及差速小齒輪之角加速度,都為+𝑦方向,𝜏1與𝜏2為 左右輪軸之負載扭力,皆為−𝑦方向,𝜏3為作用在差速器行星架上的輸入扭力,為 +𝑦方向。
圖 2-4 一般差速器受力模型
將差速器分解並繪製各桿件之自由體圖如圖 2-5,其中𝐹𝑖/𝑗表示齒輪間桿件i 對桿件j 之作用力、𝜏𝑖表示桿件i 所受之扭力、𝑟𝑖表示桿件i 之齒輪節圓半徑。
圖 2-5 差速器各桿件自由體圖
分析自由體圖,可對各桿件分別列出以下四條力學方程式:
2𝐹4/1× 𝑟1− 𝜏1 = 𝐼1× 𝜔̇1 (2.21) 2𝐹4/2× 𝑟2− 𝜏2 = 𝐼2× 𝜔̇2 (2.22) 𝜏3− 2𝐹4/1× 𝑟1 − 2𝐹4/2× 𝑟2= 𝐼3× 𝜔̇3 (2.23) 𝐹4/1× 𝑟4− 𝐹4/2× 𝑟4= 𝐼4× 𝜔̇4 (2.24) 其中桿件④為差速小齒輪,一般來說由於其轉動慣量𝐼4相對於整車驅動之轉動 慣量來說極小,因此在式(2.24)中將其忽略,因此可知𝐹4/1= 𝐹4/2,此處令𝐹4/1 = 𝐹4/2 = 𝐹。又在差速器中,𝑟1 = 𝑟2,此處令𝑟1 = 𝑟2 = 𝑟,重新整理上述運動及力學方 程式,可得以下描述差速器之動態方程式。
𝜔̇1+ 𝜔̇2 = 2𝜔̇3 (2.25) 2𝐹 × 𝑟 − 𝜏1 = 𝐼1× 𝜔̇1 (2.26) 2𝐹 × 𝑟 − 𝜏2 = 𝐼2 × 𝜔̇2 (2.27) 𝜏3− 4𝐹 × 𝑟 = 𝐼3 × 𝜔̇3 (2.28) 由式(2.25)~(2.28)的關係可發現一般開放式差速器之缺點,當左側輪打滑時,
𝜏1值降低,造成𝜔̇1上升,𝜔̇2下降,代表打滑輪角加速度上升而未打滑輪角加速度 下降,因此造成整車之加速性能降低。
2-4 扭力分配系統之背景概念 2-4-1 離合器動力傳遞特性
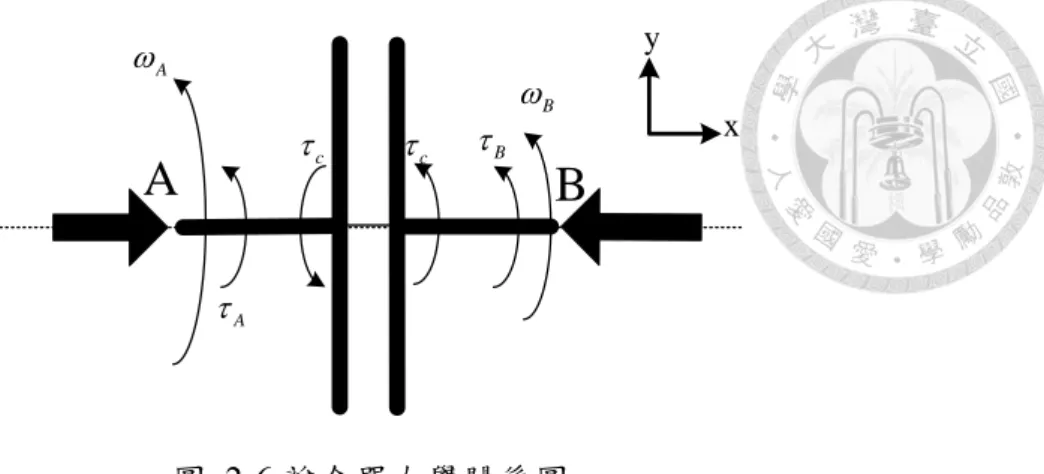
如圖 2-6,離合器(Clutch)是一種透過摩擦力傳遞動力之機構,可分為常開 式和常閉式,常開式離合器兩側平時為分離狀態,長閉式兩側平時為接合狀態。以 常開式離合器為例說明,當傳遞動力時兩側受 x 方向正向力而接合,受力後在兩 側元件接觸面產生摩擦力矩𝜏𝑐,𝜏𝑐會隨著接觸面x 向壓力增大而增加,動力傳遞之 最大值取決於摩擦面之最大靜摩擦力。
圖 2-6 離合器力學關係圖
離合器動力傳遞之限制為動力只能由高轉速端傳遞至低轉速端,圖 2-6 中 A 側轉速𝜔𝐴較B 側轉速𝜔𝐵快,A 側受到𝜏𝑐的抵抗力矩,總力矩為𝜏𝐴 − 𝜏𝑐;B 側受到 𝜏𝑐的驅動力矩,總力矩為𝜏𝐵+ 𝜏𝑐。當x 方向正向力夠大時,離合器相當於一軸,此 時A、B 側轉速同步,且所受力矩相等,式(2.29)為離合器完全接合時𝜏𝑐之最大值;
代表當最大摩擦力矩大於𝜏𝑐時,離合器形同一軸。
K. Sawase 和 K. Inoue[33]提到在大部分之扭力分配差速器(Torque vectoring differential)中都必須使用打滑式離合器(Slip clutch)來控制扭力的傳輸,控制過程 中希望輸入端轉速皆大於輸出端,但因離合器打滑過程中所產生之能量損失如式 (2.30)所示與兩端轉速差成正比,因此實際上只會調整兩端轉速差至必需的最大轉 速差,而不是無上限的增加輸入端之轉速。
𝜏𝐴 − 𝜏𝑐 = 𝜏𝐵+ 𝜏𝑐 → 𝜏𝑐 =𝜏𝐴− 𝜏𝐵
2 (2.29)
𝐸𝑙𝑜𝑠𝑠 = 𝜏𝑐 × ∆𝜔 = 𝜏𝑐× |𝜔𝐴− 𝜔𝐵| (2.30)
2-4-2 限滑差速器
一般差速器在轉向時能使兩側輪軸以不同角速度過彎,減少輪胎打滑磨損之 情況,但當一側輪軸發生打滑時,另一側未打滑之輪軸加速性能會受影響。限滑差 速器(Limited-slip differential, LSD)因此產生,運作方式為當一側輪軸打滑時利用 機構將差速器鎖定使其變成實軸,因此可以提升加速性能。
限滑差速器可分為純機械之被動式以及使用電控之主動式,主動式限滑差速 器可控制離合器接合時傳遞之扭力。圖 2-7 是其中一種實際應用之架構,此架構
A
A
B
A B
B
c c x
y
以一般差速器為基礎加上一組可控離合器,當離合器接合時,根據離合器之力學傳 遞關係可知,若左側輪軸轉速較右側慢,左側輪軸將獲得扭力並且加速;反之左側 輪軸轉速較右側快時,離合器會使左側輪軸降低扭力並且減速。由此可知限滑式差 速器之特性為只能將動力從高速軸傳至低速軸,並無法達成任意分配扭力之功能。
i
i1
w 1
w2
w 2
w
c
ls圖 2-7 主動式限滑差速器架構(Gerodisc type Differential) [34]
2-4-3 能任意分配扭力之差速器概念
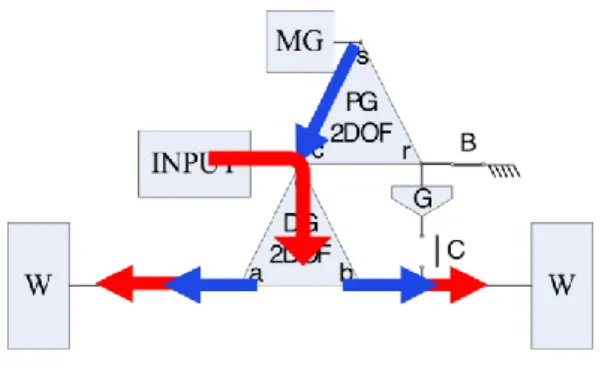
若要提升車輛性能,LSD 之設計並不足夠,因此 A. Z. Leonidas Kakalis、Federico Cheli 和 Gian Claudio Travagli[8]提出一種主動式差速器(Active differential)之概念,
此主動式差速器以一般差速器為基礎,但額外多出某種可於左右兩軸間任意分配 扭力之機構,也就是說此機構可將扭力從轉速較快之輸出軸傳遞至較慢之輸出軸,
或是將扭力從慢速軸傳遞至快速軸。此種可任意分配扭力系統之概念如圖 2-8 所 示,簡易力學模型可表示成圖 2-9。
圖 2-8 可任意分配扭力系統概念圖[8]
in
1
1
2
2I c
I
w
cI
w2
T 1
T圖 2-9 可任意分配扭力系統概念之力學模型
假設存在某一種機構,可任意從差速器行星架傳遞𝜏𝑇1與𝜏𝑇2之扭力到左右輸出 軸。差速器之動態關係可由式(2.25)~(2.28)改寫成式(2.31)~(2.34)。
𝜔̇1 + 𝜔̇2 = 2𝜔̇𝐶 (2.31) 2𝐹 × 𝑟 − 𝜏1+ 𝜏𝑇1 = 𝐼𝑊× 𝜔̇1 (2.32) 2𝐹 × 𝑟 − 𝜏2+ 𝜏𝑇2 = 𝐼𝑊× 𝜔̇2 (2.33) 𝜏𝑖𝑛− 4𝐹 × 𝑟 − 𝜏𝑇1− 𝜏𝑇2 = 𝐼𝐶× 𝜔̇𝑖𝑛 (2.34) 經由扭力分配,若打滑時可減少打滑輪之扭力,當車輛轉向時,可以調整內、
外側輪之扭力,使車輛之偏擺角速度(yaw rate)增加,提升車輛轉向之性能。
2-5 功能動力圖論方法
為分析各種動力系統內元件之相互連結關係以及動力在系統內的傳遞關係,
陳羿名[16]發展一種稱為功能動力圖(Function Power Graph, FPG)之圖論方法。本 研究為了對先前已發展之扭力分配差速器進行分析,以及對後續研究之需要,將於 本小節簡略介紹功能動力圖之用法,並定義本研究中將使用到的符號。
功能動力圖由五類基本元件之圖形符號組成,包含動力元件、傳動元件、離合 器煞車元件、多自由度元件、以及連接元件,其用法為將真實機構中的各種動力元 件以定義之圖形符號表示並且以功能動力圖中的連接元件表示各動力元件之間的 機械、能量連結,因此能以圖形化之方法簡明並精確的表示出動力系統之架構,以 下將選取本研究需用到的動力元件進行說明如表 2-1。
符號 符號說明
c
a b
DG 2DOF
DG 表示差速器 Differential Gear,其中三角形之端點 a、b 和 c 分別 表示連接第一輸出軸、第二輸出軸、以及輸入軸之連接點。
c
s r
PG 2DOF
PG 表示行星齒輪組 Planetary Gear,其中三角形之端點之 r、c 和 s 分別表示行星齒輪組中的環齒輪、行星架和太陽齒輪。
INPUT INPUT 為系統之主要動力輸入源,可為內燃機引擎或是電機(馬達)。 ICE ICE 為內燃機引擎,為車輛之主要動力源之一。
MG MG 表示 Motor/ Generator,為以電力驅動並且具備馬達/發電機之功 能的電機。
G G 表示具有單一減速比之動力傳遞機構,如齒輪或鍊條等。
C C 表示 clutch,為離合器元件,可控制動力流路徑之接合或分離。
B B 表示 Brake,為煞車元件,一端以接地符號表示,接合後另一端元 件即停止運動。
W1 車輛之左前輪。
W2 車輛之右前輪。
W3 車輛之左後輪。
W4 車輛之右後輪。
在線段兩端接上元件,表示動力在這兩元件間傳遞。
表 2-1 功能動力圖之說明
2-6 車輛動態模型
本節將定義後續數值模擬中所使用的車輛座標系統,本研究的動態分析並不 考慮懸吊系統造成的影響,並且假設車身為剛體。首先可由車輛受力分析求得四輪 正向力分配,然後介紹較為常見的阿克曼轉向模型並推導四輪之側滑角、轉向半徑 等資訊。再使用動力學推導車輛三自由度運動模型,最後計算四輪個別之質心速度。
2-6-1 車輛座標
此處將車輛運動可簡化為一剛體之六自由度運動,分為沿x 軸、y 軸和 z 軸之 水平運動和相對x 軸、y 軸和 z 軸之旋轉運動,本研究參考 Abe, Masato[35]定義之 六個車身運動狀態,如圖 2-10 所示。
圖 2-10 車輛座標系統[35]
1. x 軸方向(Longitudinal):車身縱向運動,定義向前為正。
2. y 軸方向(Lateral):車身側向運動,定義面對車身前進方向之左方為正。
3. z 軸方向(Vertical):車身垂直運動,參考x 軸、y 軸方向依右手定則,定義 上方為正。
4. 相對x 軸旋轉(Roll):車身側傾運動,相對 x 軸,定義逆時針方向為正。
5. 相對y 軸旋轉(Pitch):車身俯仰運動,相對 y 軸,定義逆時針方向為正。
6. 相對z 軸旋轉(Yaw):車身偏擺運動,相對 z 軸,定義逆時針方向為正。
2-6-2 車輛受力分析
本小節分析車輛行駛時之受力情況如圖 2-11。車輛行駛時主要之縱向受力來 自空氣阻力(aerodynamic resistance)𝑅𝑎、前後輪滾動阻力(rolling resistance)𝑅𝑟𝑓及𝑅𝑟𝑟、 前後輪軸驅動力𝐹𝑡𝑐1及𝐹𝑡𝑐2、爬坡阻力𝑅𝑔(假設車輛行駛於平地,𝑅𝑔為0),可得縱向 動態方程式如式(2.35),其中𝑚𝑔為車身重量,𝑎𝑥為車身縱向加速度。
2
Fn
l
l1 l2
1
Fn
A B
mg
R
aR
rfR
rrFtc2
h
z x
Ftc1
𝑚𝑎𝑥 𝑎𝑥
圖 2-11 車輛受力圖
m𝑎𝑥 = 𝐹𝑡𝑐1+ 𝐹𝑡𝑐2− 𝑅𝑎− 𝑅𝑟𝑓− 𝑅𝑟𝑟 (2.35) 為計算前後輪軸總正向力𝐹𝑛1、𝐹𝑛2,分別對A、B 兩點求力矩,假設空氣阻力 之受力中心距離地面高度與質心距離地面高度均為ℎ,可得式(2.36)和式(2.37),其 中𝑙為車輛軸距、ℎ為質心距離地面高度、𝑙1為質心和前軸之距離、𝑙2為質心和後軸 之距離。
𝐹𝑛1= 1
𝑙[𝑚𝑔𝑙2− ℎ(𝑅𝑎+ m𝑎𝑥)] (2.36) 𝐹𝑛2 =1
𝑙[𝑚𝑔𝑙1+ ℎ(𝑅𝑎+ m𝑎𝑥)] (2.37) 接著依照前述方式,將輪軸總正向力分為左右輪受力,參考圖 2-12,側向加 速度𝑎𝑦產生的側向力按照前後質心分布位置之比例分配,對C、D 兩點求合力矩為 0,可得前左、前右輪之正向力如式(2.38)、(2.39) ,後軸左右輪如式(2.40)、(2.41)。
d
d/2 d/2
1 h Fn 1
Fn L Fn R1
C D
z y
𝑙2
𝑙 𝑚 ∙ ℎ ∙ 𝑎𝑦 𝑎𝑦
𝐹𝑛1𝐿 =𝐹𝑛1×𝑑 2 −𝑙2
𝑙 mh𝑎𝑦 𝑑
(2.38)
𝐹𝑛1𝑅 =𝐹𝑛1×𝑑 2 +𝑙2
𝑙 mh𝑎𝑦
𝑑 (2.39)
𝐹𝑛2𝐿= 𝐹𝑛2×𝑑 2 −𝑙1
𝑙 mh𝑎𝑦
𝑑 (2.40)
𝐹𝑛2𝑅 =𝐹𝑛2×𝑑 2 +𝑙1
𝑙 mh𝑎𝑦
𝑑 (2.41)
2-6-3 阿克曼轉向幾何
參考 Wong[36]之車輛轉向幾何和分析,假設車輛之四輪無側向滑動以純滾動 轉向,並假設車輛質心繞一固定中心旋轉。如圖 2-13 所示,前輪轉向之車輛其前 兩輪軸心延長線與後輪軸心延長線交於中心O,轉向外側前輪轉向角𝛿𝑜與內側前輪 轉向角𝛿𝑖不同,且符合式(2.42)之關係,其中 B 為輪距(track),L 為軸距(wheelbase)。
cot
o cot
i B L /
(2.42)圖 2-13 阿克曼轉向幾何[36]
圖 2-14 是阿克曼轉向機構之側滑角示意圖,其中 u、v 分別為 x、y 方向之速 度,r 為 z 向的角速度。設定左輪轉向角𝛿𝑓𝑙,可用式(2.42)求出右輪轉向角𝛿𝑓𝑟,利 用此瞬間車輛質心u、v、r 值,可推導出各輪之側滑角α𝑓𝑙、α𝑓𝑟、α𝑟𝑙、α𝑟𝑟,此處參 考Azadeh Farazandeh 等人[37]對於側滑角的想法,並且修正錯誤如式(2.43)~(2.46)。
u v
f l
f l
r l
l1
l2
d r
f r
f r
r r
x y
圖 2-14 阿克曼轉向幾何之側滑角
1 1
1 2 fr fr tan
l r v u dr
(2.43)1 1
1 2 fl fl tan
l r v u dr
(2.44)1 2
1 2 rr tan
l r v u dr
(2.45)1 2
1 2 rl tan
l r v u dr
(2.46)接下來,尋找車輛瞬心的方法為各點速度垂直方向延伸的交點,利用左邊前後 兩輪 A、C 速度的垂直方向求此點,再求出轉動半徑,示意圖如圖 2-15。具體作 法為找出L2,利用 A(l1, d/2)點座標以及角度 th1 求出 Oc 座標,即可求出轉動半徑 G 與 Oc 距離,詳細作法如式(2.47)~(2.52)。
f l
f l
r l
l
th1
th2 L2
th3
x y A
C
Oc G(0,0)
th1 ( ) 2 fl fl
(2.47)
th2 ( )
2 fl fl
(2.48)
th3
th 1 th 2
fl
fl
rl (2.49) 2 2 sin(th 2)sin(th 3) sin(th 2) sin(th 3)
l L l
L
(2.50)Oc 座標:
2 ( cos(th1),sin(th1)) (l1 2 cos(th1), d/ 2 2 sin(th1))
AL L L (2.51)
R
Oc (0, 0)
(2.52)2-6-4 平面車輛動態方程式
本研究探討動力分配系統對於車輛行進、轉向時的動態行為,因此首先要建立 車輛運動時,四輪受力與車身動態之關係方程式,描述之運動行為將以跟隨車體同 步平移旋轉之xyz 座標系來分析,包括相對於 x、y 方向的平移,與相對於 z 軸旋 轉共三個自由度之運動,如圖 2-16 所示。
u v
r x
y
圖 2-16 三自由度車輛動態模型
(𝑖 )
u v
x
y
(𝑗 )(𝑖 )
x
y
(𝑗 )dθ
dθ
𝑢 + 𝑑𝑢
𝑣 + 𝑑𝑣
𝑡 𝑡 + 𝑑𝑡
圖 2-17 坐標系旋轉示意圖
首先推導x、y 方向之加速度。參考圖 2-17,令 x 方向之方向向量為𝒊,y 方向 之方向向量為𝒋,假設時間 t 時,車輛在 x 方向上之速度純量為𝑢,y 方向上之速度 純量為𝑣,因此可以式(2.53)表示車體於平面上之速度向量𝑉⃑ 。
𝑉⃑ = 𝑢𝒊 + 𝑣𝒋 (2.53) 將式(2.53)對時間微分可得車體於平面上之加速度向量𝑎 。
𝑎 = 𝑑
𝑑𝑡𝑉⃑ =𝑑𝑢
𝑑𝑡 ∙ 𝒊 + 𝑢 ∙𝑑𝒊 𝑑𝑡+𝑑𝑣
𝑑𝑡∙ 𝒋 + 𝑣 ∙𝑑𝒋
𝑑𝑡 (2.54) 圖 2-17 右側為時間 t+dt 時之狀態,當 dt 趨近於 0 時,𝒊的變化量可近似於dθ,
且變化方向為+𝒋方向,𝒋的變化量可近似於dθ,且變化方向為−𝒊方向,因此可知式 (2.54)中的𝑑𝑡𝑑𝒊、𝑑𝑡𝑑𝒋分別可表示成如下:
𝑑𝒊 𝑑𝑡= 𝑑𝜃
𝑑𝑡 ∙ 𝒋 (2.55)
𝑑𝒋
𝑑𝑡= −𝑑𝜃
𝑑𝑡∙ 𝒊 (2.56)
將式(2.55)、(2.56)代回式(2.54)可知
𝑎 =𝑑𝑢
𝑑𝑡 ∙ 𝒊 + 𝑢 ∙𝑑𝜃
𝑑𝑡∙ 𝒋 +𝑑𝑣
𝑑𝑡∙ 𝒋 − 𝑣 ∙𝑑𝜃
𝑑𝑡 ∙ 𝒊 (2.57) 又
𝑑𝑢
𝑑𝑡 = 𝑢̇,𝑑𝑣
𝑑𝑡 = 𝑣̇,𝑑𝜃
𝑑𝑡 = 𝑟 (2.58) 代回式(2.57)可得
𝑎 = 𝑢̇ ∙ 𝒊 + 𝑢𝑟 ∙ 𝒋 + 𝑣̇ ∙ 𝒋 − 𝑣𝑟 ∙ 𝒊 (2.59) 整理可得車體之縱向(x 方向)、側向(y 方向)加速度分別為
𝑎𝑥= 𝑢̇ − 𝑣𝑟 (2.60) 𝑎𝑦 = 𝑣̇ + 𝑢𝑟 (2.61)
![圖 2-1 行星齒輪組示意圖[29]以及機構簡圖 參考劉思佳[29]對行星齒輪組之分析,根據其機構運動特性,可以得到兩條行 星齒輪組之運動方程式,如式(2.1)、(2.2)所示(其中](https://thumb-ap.123doks.com/thumbv2/9libinfo/9603609.629940/30.892.235.790.115.323/為桿件.webp)
![圖 2-7 主動式限滑差速器架構(Gerodisc type Differential) [34]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9603609.629940/36.892.219.651.281.508/圖27主動式限滑差速器架構GerodisctypeDifferential34.webp)
![圖 2-19 輪胎座標系統[36]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9603609.629940/47.892.277.797.119.421/圖219輪胎座標系統36.webp)