链式可重构模块化机器人变形机理与实现 3
刘金国 王越超 李 斌 马书根
【摘要】 设计了一种手动可重构、自动变形的新型链式模块化机器人机构,它可以通过结构重构和自动变形 来改变自身的构形以适应非结构环境中运动和作业的要求。单个标准模块由模块本体、连接臂和偏置关节等组成。
偏置关节避免了变形时模块间的运动干涉,扩大了机器人模块间的相对运动空间。 设计了一台三模块变形机器人 样机,并对该样机进行了由直线形态、三角形态到并排形态的变形实验,此外还对变形机器人不同构形的运动性能 进行了实验分析。
关键词: 可重构模块机器人 变形机理 结构设计 实验 中图分类号: T P 24 文献标识码: A
Tran sm uta t ion M echan ism s an d Its Rea l iza t ion of a Cha in - type Recon f igurable M odular Robot
L iu J inguo1 W ang Yuechao1 L i B in1 M a Shugen2
(11S heny ang I nstitu te of A u tom a tion,CA S 21I ba rak i U n iv ersity, J ap an) Abstract
A m anua lly reco nf igu rab le and t ran sm u tab le m odu la r ro bo t w a s develop ed, w h ich co u ld change it s shap e to adap t to an env iro nm en t and a ta sk if needed. T he t ran sm u tab le m o du la r ro bo t ha s a novel cha in2type modularized structure. L ike a common moudula, each module of the ro bo t co n sist s of a d riving bo dy com ponen t, a link a rm and off set jo in t s. T he o ff set jo in t s adop ted in the novel m echan ism w ere to im p rove the rela t ive m o t ion sp ace betw een the ad jacen t m o du les. A t ran sm u tab le robo t w ith th ree m odu la rs w a s designed in th is w o rk. T he m etam o rp h ic exp erim en t s and the un st ructu red environm en t exp erim en t s ind ica ted it s h igh
f lex ib ility and m ob ility of the ro bo t.
Key words R eco nf igu rab le m o du la r robo t, T ran sm u tab le m echan ism , M echan ica l design , Exp erim en t
收稿日期: 2004 12 10
3 国家“863”高技术研究发展计划资助项目(项目编号: 2001AA 422360)
刘金国 中国科学院沈阳自动化研究所机器人学重点实验室 博士生, 110016 沈阳市 王越超 中国科学院沈阳自动化研究所机器人学重点实验室 研究员 博士生导师 李 斌 中国科学院沈阳自动化研究所机器人学重点实验室 研究员
马书根 日本茨城大学工学部系统工程系 研究员 博士生导师, 316 8511 日立
引言
可重构机器人是一种具有较强环境自适应能力 的机器人, 它可以根据环境变化和任务要求而改变 自身的构形来完成不可预知的作业任务[ 1~7 ]。 这种 构形的变化主要体现在两个方面: ①由组成机器人 各个部件的连接方式重新组合而实现机器人数量和 构形的相对变化, 这种变化可以是手动和自动的结 构重构变形。 ②由于可重构模块机器人通常是由多
个相同或互异的模块组成的多冗余结构, 由连接机 器人构件的关节如旋转关节、移动关节的运动而引 起机器人构形的相对变化, 这种变化主要是自身的 关节运动变形。
机器人的关节运动变形与机器人的结构重构变 形相比, 前者在可靠性、能量消耗、时间消耗、机械系 统和控制系统的复杂性等方面有优势, 更便于投入 到实际应用当中; 但后者具有更强的灵活性和应变 能力。 本文在对链式结构的变形机理进行研究的基
础上, 融合了重构变形和关节运动变形的特点, 设计 一台三模块变形机器人, 并对其进行变形实验和环 境实验。
1
模块化变形机器人变形机理
111 变化以适应环境
在非机构环境中, 变形机器人的环境适应能力 要求反映到系统的软、硬件设计当中, 机器人的通过 能力和作业能力是其重要衡量指标, 机器人的环境 适应能力需要通过“以变应变”才能实现, 它通常表 现在以下几个方面:
步态的变化: 机器人能够在不同的地面和环境 情况下采取不同的运动步伐, 例如仿人的步态有行 走、奔跑、跳跃等, 仿生物蛇的步态有蜿蜒运动、伸缩 运动、侧向运动、直线运动、冲刺运动、推进运动以及 跳跃等多种运动方式。
形态的变化: 机器人关节的运动导致本体的某 些部分相对位置的变化而重新呈现一种新的作业构 形, 以适应环境的要求。 例如变形金刚, 各种轮、腿、
履带等驱动形式复合的移动机构等。
结构的变化: 组成机器人各个部件连接方式的 重新组合而实现机器人数量和构形的相对变化, 机 器人根据相应的作业要求进行结构的重组。
功能的变化: 机器人功能的变化是以上 3 种变 化的最终综合体现, 机器人不同的工作阶段、不同的 环境当中需要发挥不同的作用, 机器人功能的灵活 多变对机器人本体和智能控制均有较高的要求。
模块化变形机器人是一种形态和结构均能够变 化的新型链式结构, 机器人模块的数量可以根据实 际需要选择, 机器人通过变形可以产生多种构形, 同 时每种构形又具有多种步态以适应作业的需要。
112 模块化可变形链式结构
目前, 各种用于非结构环境的移动机器人机构 中, 模仿生物蛇原型的链式机构由于具有多于确定 空间位置和姿态所需的自由度, 是拥有广泛用途的 机器人模型, 它能够有效、迅速、可靠地响应于许多 非结构环境的作业。 对具有环境适应能力的蛇形机 器人进行了研究, 为进一步提高机器人的运动能力 和环境适应能力, 有两个方面的深入研究值得注意:
①蛇形机器人具有机构重复、易模块化的特点, 研制 可重构蛇形机器人。②蛇形机构具有多冗余的特点, 可以利用关节的运动使机器人呈现多种构形, 研制 可变形蛇形机器人。
第一种情况, Shen W 、Y im M 等进行了大量的
研究[ 1, 2 ]。 非结构环境复杂且作业任务时间紧迫, 机
器人结构的自重构需要部件的连接和断开, 需要耗
费一定的时间和能量, 同时在结构重组的控制上也 较困难。
由于实际自然界中生物蛇的关节具有三维运动 功能, 蛇形链式机构中, 类似图 1 的两种简化关节模 型被广泛采用, 相邻关节间分别存在 1 至 2 个仰俯 或偏转自由度。但由于关节间的几何干涉, 相邻关节 的运动范围受到限制。 从图 1 可以看出,ΗY 与ΗP 的 活动范围均小于 360°, 系统变形能力有限。 因此对 手动可重构、自动变形的模块化新型链式机构进行 研究; 这里称之为新型链式机构, 是因为它的关节结 构形式与生物蛇的关节形式存在较大的区别。 利用 关节偏置的方法, 该新型链式机构避免了干涉, 通过 连接臂和偏置关节实现了结构的组合和变形。 如 图 2 所示, 模块的仰俯和偏转关节分别置于模块的 两侧, 模块间通过连接臂来进行连接, 通过模块与连 接 臂间相对位置的变化而实现变形。 从图 2a 到 图 2b 过程中, 偏转关节ΗY 相对变化 180°; 从图 2b 到图 2c 的过程中, 仰俯关节ΗP 相对变化 180°。这种 新型链接的特点是不论模块多少, 它总能够通过链 接关节的运动而变形以得到多种对称的构形, 特别 是两种规则形: 直线形、并排形。 链式模块化变形机 器人模块的数量可以根据实际需要进行选择, 随着
图1 普通链式结构 F ig. 1 Comm on cha in2typ e st ructu re (a) 模块间为偏转关节 (b) 模块间为仰俯关节
图2 新型可变形链式结构
F ig. 2 A nove l reconfigu rab le cha in2typ e st ructu re (a)直线构形 (b) 过渡构形 (c) 并排构形
机器人模块数量的增加, 变形机器人的构形数量将 呈指数增长。
为使机器人在变形前后结构对称、外形整齐、便 于控制, 需要对系统的有关尺寸进行严格的限制。如 图 2, 其主要尺寸关系为
la= lb+ lc (1)
式中 la——模块的接地长度 lb——连接臂长度
lc——偏转关节离模块近端距离
2
模块化变形机器人结构设计
211 单模块结构设计
在非结构环境当中, 轮式、腿式、履带式移动机 构相比: 轮式移动机器人具有高速高效的特点, 但越 过壕沟、台阶的能力较低; 腿式移动机器人地形适应 能力强, 能越过大的壕沟和台阶, 其缺点是速度和效 率低, 控制系统复杂, 因为腿和地面的接触面积小而 使得压强大; 履带式移动机器人地形适应能力相对 较强, 动载荷小, 设计紧凑, 具有高度的通行性能, 比 如在松软地面、泥泞路面、起伏地面均具有良好的通 行能力, 在超越垂直壁, 攀登纵坡和侧坡方面具有良 好的跨越能力, 其缺点是重量大、能耗大。 为了更好 的体现机器人系统的环境适应能力, 采用模块化履 带式移动结构。
图3 单模块结构
F ig. 3 St ructu re of a sing le m odu le
1.高履刺履带 2.中空带轮 3.仰俯关节驱动电动机 4. 连接 臂 5.中间盒盖 6.履带驱动电动机 7.偏转关节驱动电动机 8.偏转关节 9. 连接柄
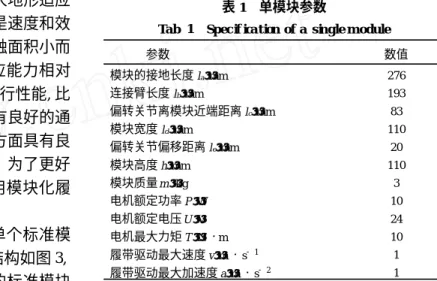
根据图 2 所示的链式变形机理, 对单个标准模 块的结构进行了设计。单个标准模块的结构如图 3, 单模块的有关参数见表 1。 变形机器人的标准模块 主要由中间通孔式连接手臂、履带驱动电动机、模块 偏转电动机、模块俯仰电动机、锥齿轮传动机构、带 轮传动机构以及履带驱动机构等组成。 电动机和电 源与有关控制器均放置在模块中部的密闭盒式结构 当中。
由该种模块组成的变形机器人具有如下特点:
( 1) 结构模块化: 模块间互换性好、相对成本 低、易产品化、维修维护方便、协调控制方便, 且重构 时不受模块数量的限制, 变形时其对称构形外型整 齐美观。
(2) 手动可重构: 可根据环境和任务的需要选 择模块的数量和组合方式, 手动可以轻易的实现连 接手臂与其他模块的连接与断开。
(3) 自动变形能力: 3 个 (或 3 个以上) 模块可以 组成直线型、三角型、并排型 3 种基本形式和其它多 种形式, 通过变形以适应环境与任务空间的要求: 直 线型可以穿过狭窄地形、越过沟壑; 三角型可以协同 爬坡、越障碍; 并排型可以便于在沼泽松软地面运 动、转弯、原地旋转、承载等。
表1 单模块参数
Tab. 1 Spec if ica tion of a s ingle m odule
参数 数值
模块的接地长度lagmm 276 连接臂长度lbgmm 193 偏转关节离模块近端距离lcgmm 83 模块宽度ldgmm 110 偏转关节偏移距离legmm 20
模块高度hgmm 110
模块质量mgkg 3
电机额定功率PgW 10
电机额定电压UgV 24
电机最大力矩TgN・m 10 履带驱动最大速度vgm・s- 1 1 履带驱动最大加速度agm・s- 2 1
(4) 运动与作业能力: 每个模块的连接手臂可 以辅助转弯、进行简单的样品采集和探测作业; 多个 模块具有更好的运动灵活性和作业功能。
(5) 中空结构的采用: 连接臂的中间通孔便于 控制线和电源线的通过, 避免在变形过程中线路的 干涉和限制; 同时, 履带驱动轮为浮筒式中空密闭结 构, 在水中可以产生足够的浮力使得模块浮于水面, 必要时机器人在水中也具有变形、运动和作业能力, 该结构为机器人的水陆两用创造了条件。
212 三模块变形机器人
为了实用, 在多模块变形机器人中减少了首尾 模块的关节数量。基于前述手动可重构、自动变形的 原理, 研制出了一台三模块履带驱动变形机器人样 机。如图 4 所示, 它由 3 个模块组成, 中间模块 (模块 2) 为标准模块。 首模块 (模块 3) 只安装履带驱动装 置、模块仰俯装置, 中间模块均为标准模块, 尾模块 (模块 1) 只安装履带驱动装置、模块偏转装置。模块 间通过仰俯关节、连接臂和偏转关节进行重构连接, 由偏转关节、仰俯关节的运动实现变形。为测试三模
块变形机器人样机的变形功能和非结构环境中运动 性能指标, 对变形机器人进行了变形实验和环境实 验。
图4 三模块变形机器人结构 F ig. 4 T h ree2m odu le t ran sm u tab le robo t
(a) 实体结构 (b) 结构简图
1.模块1 2.偏转关节1 3.仰俯关节1 4.模块2 5.偏转关节2 6.仰俯关节2 7.模块3
3
三模块变形机器人样机实验
图5 变形实验结果 F ig. 5 Shap e sh ift ing exp e rim en t
311 变形实验与分析
图 5 显示了图 4 中三模块变形机器人从直线状 态到并排状态间各种构形相互切换的整个过程, 各 种构形转换十分灵巧, 其逆过程亦然。根据驱动履带 的位置关系, 从图 5 可以看出, 三模块变形机器人具 有 5 种能动构形: (a)、(c)、(e)、(g)、(h) ; 变形机器 人在能动构形状态下, 履带驱动方向互相平行, 可控 性好。5 种能动构形中, 有 3 种对称构形: (a) 为直线 形态, (e) 为三角形态, (h) 为并排形态; 其余为中间 过渡构形。
图 5 所示机器人变形过程可分成如下 4 个步 骤:
( 1) ( a ) → (b ) → (c) , 偏 转 关 节 1 相 对 变 化 180°。
假定机器人模块的质量中心为其几何中心, 关 节转动摩擦忽略不计, 履带与地面接触时的正压力 和摩擦力分布均匀 (下同)。 此时偏转关节 1 所需要 的偏转力矩为
TY, 1=m gf (le+ ldg2)2+ (lag2- lc)2 (2) 式中 f ——履带与地面的摩擦因数
( 2) (c) → (d ) → (e) , 偏 转 关 节 2 相 对 变 化 180°。
此时偏转关节 2 所需要的偏转力矩为
TY, 2=m gf (le+ ldg2)2+ (lag2+ lb)2 (3) ( 3) (e ) → (f ) → ( g ) , 仰 俯 关 节 2 相 对 变 化 180°。
此时仰俯关节 2 所需要的最大仰俯力矩为
TP, 2= m g lag2 (4)
(4) (g) → (h) , 仰俯关节 1 相对变化 180°。 此时仰俯关节 1 所需要的最大仰俯力矩为
TP, 1= m g lag2 (5)
整个变形过程中, 偏转关节 2 所需要的力矩较 大, 为了减少偏转关节的偏转力矩, 可以利用仰俯关 节 2 将模块 3 抬起 90°后再进行偏转变形, 此时偏转 关节 2 的偏转力矩为
TY, 2′=m gf (le+ ldg2)2+ l2b (6) 根 据文献 [ 8 ], 取履带与地面的摩擦因数f = 017, 将表 1 中的机器人模块有关参数代入式 (2)~
(6) , 可以计算出三模块变形机器人关节偏转力矩和 仰俯力矩为:TY, 1= 1195 N ・m ,TY, 2= 7113 N ・m , TP, 1= TP, 2= 4114 N ・m ,T′Y, 2= 3130 N ・m。
在图 5 的变形实验中, 三模块变形机器人在 3 种对称构形状态下的外形尺寸见表 2。
表2 三模块变形机器人对称构形的外形尺寸 Tab. 2 D im en s ion of three-m odule robot in
symm etry conf igura tion
形态 长度gmm 宽度gmm 高度gmm
直线 1 250 190 110
三角 660 420 110
并排 390 420 110
312 环境实验与分析
三模块履带式变形机器人的 3 种对称构形外形 尺寸不尽相同, 其运动能力各异。考虑到非结构环境 通常由坡度、垂直壁、坎坷等障碍组成, 选择了几种
典型的环境。 图 6 为变形机器人 3 种对称构形在不 同环境中的实验结果。
图6 环境实验结果 F ig. 6 Environm en ta l exp e rim en t (a) 斜坡爬行 (b) 壕沟通过 (c) 爬楼梯 (d) 狭道通过 (e) 爬垂直壁 (f) 废墟爬行
变形机器人的最大爬行坡度角Η基本上取决于 履带和斜坡之间的摩擦因数Λ, 它们之间的关系为
Η= arctanΛ (7) 实验表明, 3 种形态具有相同的斜坡爬行能力, 如图 6a 所示的光板, 变形机器人的可爬行坡度角为 25°。
机器人壕沟通过能力取决于机器人体长、机器 人重心的位置及壕沟的宽度。如图 6b 所示, 直线形 态具有最强的跨越壕沟能力, 它可以跨越450 mm 宽 的壕沟, 而三角形态和并排形态的跨越宽度分别为 250 mm 和 150 mm。
变形机器人楼梯爬行性能取决于履带的形状、
楼梯尺寸、机器人的爬行步态、机器人的构形等因
素[ 9 ]。3 种形态中, 直线形态具有最强的台阶运动能
力, 如图 6c 所示, 它可以上下踏面 300 mm、踢面 150 mm 的台阶, 三角型和并排型可通过台阶分别 为踏面 250 mm、踢面 125 mm 和踏面 200 mm、踢面 100 mm。
狭道通过能力主要是受其几何外形的限制。 如 图 6d 所示, 直线形态通过狭道非常轻巧。
与楼梯爬行性能相似, 变形机器人的垂直壁爬 行性能也比较复杂。 如图 6e 所示, 直线形态可以爬 越高度为 270 mm , 三角形态爬越高度为210 mm , 而 并排形态爬越高度仅为 50 mm。
机器人在废墟中的爬行能力综合了其越障性能 和稳定性能等因素。 如图 6f, 由木头和砖头组成不 平地形来模拟灾难后的废墟环境, 并排型和三角型 均具有较好的稳定性, 而直线型容易产生侧向倾翻。
以上实验表明, 直线型因具有蛇形机构的特点 而拥有较强的运动能力。但是对不同种环境和任务, 3 种形态各有利弊, 比如: 并排形态与前两者相比运 动能力较差, 但是并排形态因为其结构紧凑, 转向所 需空间和能量均较少, 具有最佳的转弯性能, 其抗倾 翻能力也较强。
4
结束语
基于关节偏置的方法提出的新型链式结构, 除 了具有蛇形机构的一般特点以外, 还具备手动可重 构、自动变形的功能; 所设计的三模块变形机器人可 以通过多种构形和步态来适应环境空间和任务空间 的要求, 可以应用于许多非结构环境中的作业; 变形 机器人的变形实验和环境性能实验, 为机器人投入 到实际应用打下了基础。 模块化变形机器人作为运 载平台, 通过装备各种不同的仪器、设备, 具有广泛 的应用领域。
参 考 文 献
1 Y im M , Zhang Y, Roufa s K, e t a l. Connect ing and d isconnect ing fo r cha in se lf2reconfigu ra t ion w ith po lybo t. IEEEg A SM E T ran sact ion s on M echa t ron ics, 2002, 7 (4) : 442~451
2 Shen W , Sa lem i B , W ill P. Ho rm one2in sp ired adap t ive comm un ica t ion and d ist ribu ted con t ro l fo r con ro se lf2 reconfigu rab le robo t s. IEEE T ran sact ion s on Robo t ics and A u tom a t ion, 2002, 18 (5) : 700~712
3 R u s D , V ona M . C rysta lline robo t s: se lf2reconfigu ra t ion w ith com p re ssib le un it m odu le s. A u tonom ou s Robo t s, 2000, 10 (1) : 107~124
4 费燕琼,徐卫良. 机器人模块化的结构设计研究. 机器人, 1999, 21 (3) : 223~228
5 赵杰,张亮. 自重构模块机器人的研究与发展现状. 中国机械工程, 2002, 13 (17) : 1525~1529 6 徐威,姜文华,王石刚. 自重构机器人的体系结构与分类研究. 制造业自动化, 2003, 25 (7) : 30~32, 49 7 刘明尧,谈大龙,李斌. 可重构模块化机器人现状和发展. 机器人, 2001, 23 (3) : 275~279
8 黄祖永. 地面车辆原理. 北京: 机械工业出版社, 1985. 263~283
9 L iu J , W ang Y, M a S, e t a l. A na lysis of sta irs2clim b ing ab ility fo r a t racked reconfigu rab le m odu la r robo t. In:
P roceed ing of the IEEE In te rna t iona l W o rk shop on Safe ty, Secu rity, and R e scue Robo t ics, Kobe, 2005.