國立臺灣大學工學院應用力學研究所 碩士論文
Graduate Institute of Applied Mechanics College of Engineering
National Taiwan University Master Thesis
Timoshenko 和 Euler 懸臂梁本身及帶額外微小質量 在流體環境中共振頻及頻率飄移之比較
Comparisons of Resonant Frequency and Resonant Frequency Shift due to the Added Mass between Timoshenko and Euler Cantilever Beam Immersed in the
Fluid Environments
謝瀚逸 Han-Yi Hsieh
指導教授:張正憲 博士 Advisor: Jeng-Shian Chang, Ph. D.
中華民國 102 年 3 月
March , 2013
2
3
誌 誌 誌 誌謝 謝 謝 謝
終於可以寫這個,我已經等很久了。
此篇論文可以順利完成,首要感謝我的指導教授 張正憲教授,在研究期間 內,老師的細心指導,使我學到了做研究應有的方法跟觀念,同時也令我在專業 知識領域上有了新的體認與心得;除了研究,在待人處世方面,也讓我們更知道 如何與各式各樣的人應對進退,激鍊我們的說話技巧。於此種種,銘感於心。
另外,感謝 吳光鐘教授, 趙聖德教授, 黃冠榮博士在口試期間給予許多 寶貴的意見和指正,使得本論文更趨完善。各口試委員於口試期間的各種犀利的 問題,雖然只是短短的兩個小時,但卻給了我在專業領域上不同的視界,激發出 許多有別於往的想法,這樣的經驗非常寶貴。
尤其要感謝的就是黃冠榮大學長。我只能說,沒有你就沒有我。從一開始的 循循善誘,到後面毫無保留的全力協助,並在各種關鍵時刻拉我一把,沒有你這 樣拉著我,我早就不知道要掉到第幾年去了,寫著寫著,我覺得我的眼角有點濕。
誠心地祝福你未來之路一帆風順。
再來就是實驗室的夥伴們了,多待了一段時間,要寫的人就多了一些。同窗 好友柏維、裕升、瓊姿,雖然同年同月同日進來,不能同年同月同日離開是我的 一大遺憾,但我現在也終於趕上,無論是修課時期或是研究期間,若沒有你們的 陪伴及砥礪,相信我也不會這麼的順利度過。學弟妹怡亭、士瑋、尚洋、柏融、
翊栩、宗緯、南輝、鳴珊、培需,實驗室因為有了你們而增添了許多色彩。特別 感謝尚洋在最後關頭幫我處理了許多數據,否則我現在在電腦前寫的應該就不是 誌謝了,我會特別懷念跟你在二樓中庭的小小時光。研究過程一路艱辛,你們要 好好保重。
一路走來,非常感謝身邊所有好朋友們的陪伴以及鼓勵,在我研究之路苦悶 的時候得以暫時抽離,豐富我的人生。無論是哪一階段的朋友,或是以何種形式
4
出現在我身邊的朋友,如果沒有你們的出現、你們的一字一句、一舉一動,就沒 有今天的我,感謝任何一位在任何時刻出現在我生命中的人,要謝的人太多了,
那就謝天吧。無論是在就業中或是服役中,甚至於還有一些依然在研究的過程中 奮鬥的好朋友們,希望你們未來的路都可以順順利利地達成自己的目標,於此呈 上最真誠的祝福。
最後要感謝我的家人,非常感謝你們在背後默默地給予我許多關懷與鼓勵,
在我最困頓跟無助的時候,成為我最堅固的後盾與支柱,讓不思生產的我可以無 後顧之憂的在研究上專心與努力,使我能夠順利的完成學業。
謝瀚逸 2013/03/26 于台大應力所
I
摘要 摘要 摘要 摘要
本文主要建立 Timoshenko 梁於黏滯流體中的振動模型。並將之與 Euler 梁於 黏滯流體中振動行為以尺寸、流體介質種類、模態階數分類比較,最後將額外質 量對於兩理論頻率偏移之影響做比較。
本文首先介紹相關文獻,利用格林函數解析任意截面不可壓縮黏滯流體理論,
得出流體施加在扁平梁的水力負載,再將水力函數分別耦合進 Euler 梁理論與 Timoshenko 梁理論中,取得流固耦合後的頻率響應函數及受額外質量影響的頻 率響應函數。
藉由物理行為、兩理論之間的關係以及與文獻中數值結果相互驗證。以數值 結果分別比較兩理論於不同尺寸、不同流體介質、不同模態階數之關係。最後同 樣以數值結果得知額外質量對兩理論於流體環境中振動之共振頻率的影響。感測 器常於流體環境中做量測,由於其頻率於高模態時流體對結構的影響較小,且 Timoshenko 梁理論與 Euler 梁理論於高模態時差異越趨明顯,本文中之數值結果 呈現當
L h =
5時,於第八模態時其差異可達 65%,此時使用 Timoshenko 梁理論 較為妥當。關鍵字 關鍵字 關鍵字
關鍵字::::微懸臂微懸臂微懸臂梁微懸臂梁梁感測器梁感測器感測器、感測器、、原子力顯微鏡、原子力顯微鏡原子力顯微鏡原子力顯微鏡、、、、Timoshenko 梁梁梁梁理論理論理論理論、、、、Euler 梁梁梁梁理論理論理論理論、、、、 黏滯流體
黏滯流體 黏滯流體
黏滯流體、、、、振動振動振動振動、、、、頻率頻率頻率頻率響應響應響應響應
II
Abstract
This thesis is primarily based vibration model of Timoshenko beam in viscous fluid. To compare the vibration model with the vibration behavior of Euler beam in viscous fluid by the size, fluid type and modal order. In the end of the comparison, the added mass effect of two theoretical frequency shifts is compared.
This thesis firstly introduces the relevant reference. Using the Green's function to solve incompressible viscous fluid theorem of any cross-section, and to conclude hydrodynamic loading that fluid applied to the flat beam. After that, have the hydrodynamic functions coupled with the Euler beam theory and Timoshenko beam theory to obtain the frequency response function and the frequency response function which affected by the added mass after fluid-structure interaction.
Ultimately, the Timoshenko beam numerical results are verified with the physical behavior, the relationship between the two theories and the numerical results of the reference. The numerical results of the frequency response functions were compared the relationship to two theories in different sizes, different fluids, and the different modal orders. Finally, we can find out the added mass effect of resonant frequency which vibrates in the fluid environment of the two theories by the numerical results.
Sensors often do measurements in the fluid environment. Because the effect of the frequency is smaller when the fluid acting on the structure, and the differences of Timoshenko beam theory and Euler beam theory become more obvious in high mode.
The numerical results in this paper present that the difference in 8th mode is up to 65% when
L h =
5. Using the Timoshenko beam theory is more appropriate.Keywords: microcantilever beam sensor, atomic force microscope, Timoshenko
beam theory, Euler beam theory, viscous fluid, vibration, frequency response
III
目錄 目錄 目錄 目錄
摘要 ...I Abstract ... II 目錄 ... III 圖目錄 ... V 表目錄 ... XIV 符號表 ... XVIII
第一章 緒論 ... 1
1-1 研究動機與目的 ... 1
1-2 文獻回顧 ... 2
1-3 論文架構 ... 4
第二章 黏滯流體水力函數 ... 5
2-1 黏滯流體下任意截面流固耦合 ... 5
2-2 黏滯流體下扁平梁的水力負載 ... 10
第三章 流固耦合系統振動分析 ... 14
3-1 Euler 梁 ... 14
3-1-1 結構統御方程式 ... 15
3-1-2 模態形狀之求得 ... 17
3-1-3 流體中頻率響應及額外質量的影響 ... 20
3-2 Timoshenko 梁 ... 23
3-2-1 結構統御方程式 ... 23
3-2-2 流體中頻率響應與額外質量的影響 ... 26
第四章 理論驗證與數值結果 ... 30
4-1 理論驗證 ... 30
IV
4-1-1 靜態分析 ... 30
4-1-2 Timoshenko 梁與 Euler 梁相互比較 ... 33
4-1-3 與直接求解法比較 ... 36
4-1-4 與文獻比較 ... 38
4-2 數值結果 ... 49
4-2-1 剪切模數與流體對結構的影響 ... 49
4-2-2 結構長度與厚度之比值與流體的影響 ... 57
4-2-3 兩理論差異與流體影響於高模態時之關係 ... 67
4-2-4 額外質量對兩理論頻率偏移之影響 ... 113
第五章 結論及未來展望 ... 166
參考文獻 ... 169
附錄 ... 172
V
圖目錄 圖目錄 圖目錄 圖目錄
圖 2-1 梁任意截面及其邊界條件示意圖ㄧ[21] ... 7
圖 2-2 梁任意截面及其邊界條件示意圖二[9] ... 9
圖 2-3 扁平梁上下邊界條件[22] ... 10
圖 3-1 Euler 梁元素自由體圖 ... 15
圖 3-2 Timoshenko 梁元素自由體圖 ... 23
圖 4-1
L = 300 µ m b , = 36 µ m
真空環境頻率比較(第一模態) ... 35圖 4-2 理論驗證圖[13] ... 39
圖 4-3 頻率偏移驗證圖[19] ... 42
圖 4-4 頻率偏移結果驗證圖(h=1.1 m
µ
) ... 44圖 4-5 頻率偏移結果驗證圖(h=4 m
µ
) ... 44圖 4-6 頻率偏移結果驗證圖(h=6.5 m
µ
) ... 45圖 4-7 剪切模數 G 與頻率於真空環境之關係(第一模態) ... 51
圖 4-8 剪切模數 G 與頻率於空氣環境之關係(第一模態) ... 51
圖 4-9 剪切模數 G 與頻率於水環境之關係(第一模態) ... 52
圖 4-10 剪切模數 G 與頻率於甘油環境之關係(第一模態) ... 52
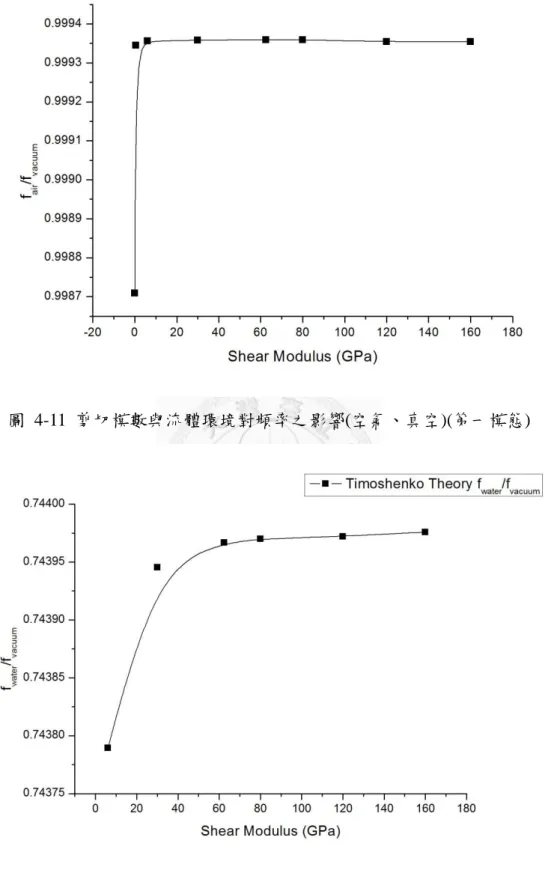
圖 4-11 剪切模數與流體環境對頻率之影響(空氣、真空)(第一模態) ... 53
圖 4-12 剪切模數與流體環境對頻率之影響(水、真空)(第一模態) ... 53
圖 4-13 剪切模數與流體環境對頻率之影響(甘油、真空)(第一模態) ... 54
圖 4-14 L h 於真空介質中對
f
Tf
E 之影響(第一模態) ... 59圖 4-15 L h 於空氣介質中對
f
Tf
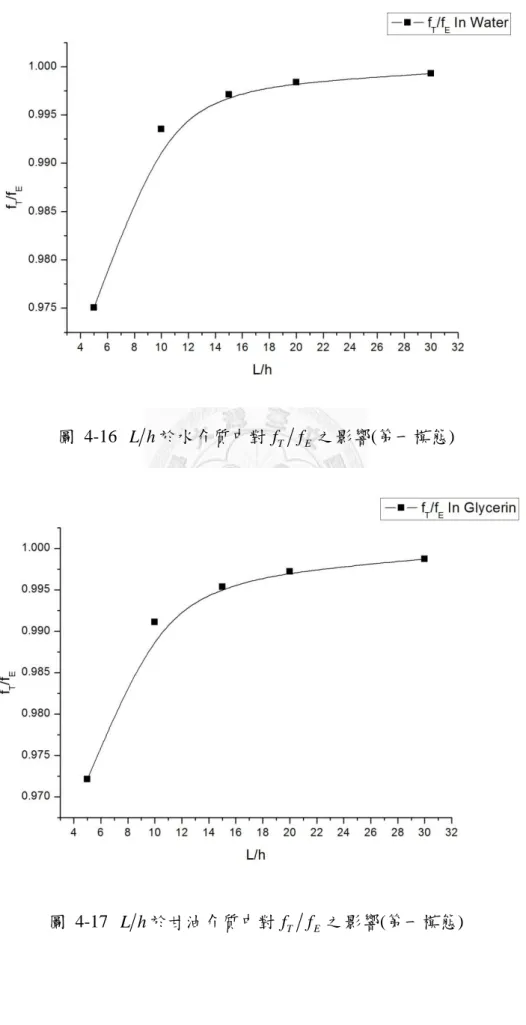
E 之影響(第一模態) ... 59圖 4-16 L h 於水介質中對
f
Tf
E 之影響(第一模態) ... 60圖 4-17 L h 於甘油介質中對
f
Tf
E 之影響(第一模態) ... 60VI
圖 4-18 L h 與流體環境於 Timoshenko 梁理論中對頻率之影響(空氣、真空)(第一
模態) ... 63
圖 4-19 L h 與流體環境於 Timoshenko 梁理論中對頻率之影響(水、真空)(第一模 態) ... 63
圖 4-20 L h 與流體環境於 Timoshenko 梁理論中對頻率之影響(甘油、真空)(第一 模態) ... 64
圖 4-21 L h 與流體環境於 Euler 梁理論中對頻率之影響(空氣、真空)(第一模態) ... 64
圖 4-22 L h 與流體環境於 Euler 梁理論中對頻率之影響(水、真空)(第一模態) ... 65
圖 4-23 L h 與流體環境於 Euler 梁理論中對頻率之影響(甘油、真空)(第一模態) ... 65
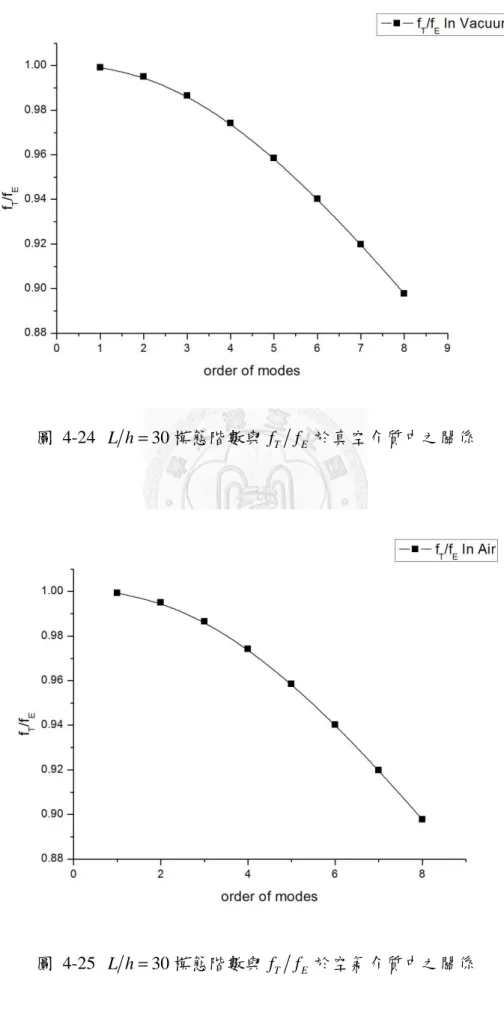
圖 4-24
L h =
30模態階數與f
Tf
E 於真空介質中之關係 ... 69圖 4-25
L h =
30模態階數與f
Tf
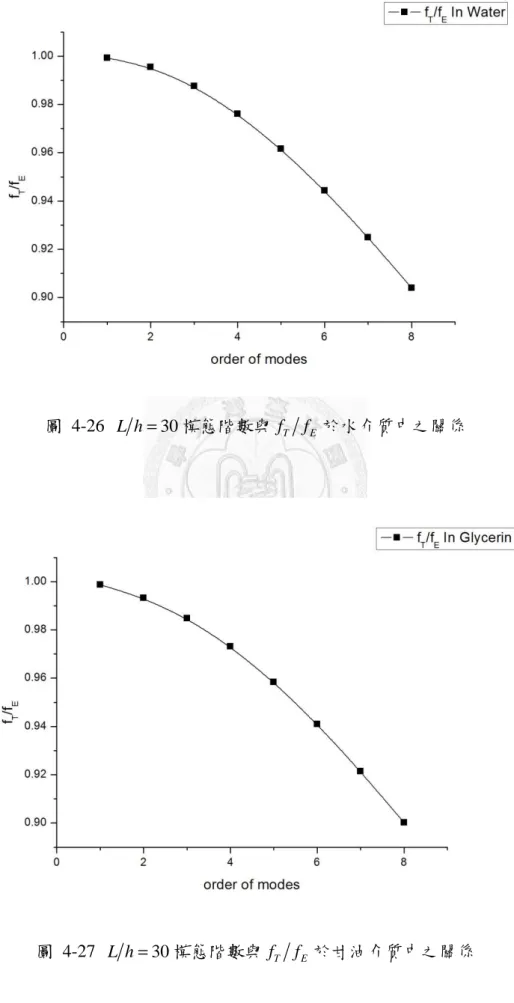
E 於空氣介質中之關係 ... 69圖 4-26
L h =
30模態階數與f
Tf
E 於水介質中之關係 ... 70圖 4-27
L h =
30模態階數與f
Tf
E 於甘油介質中之關係 ... 70圖 4-28
L h =
30模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響(空 氣、真空) ... 72圖 4-29
L h =
30模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響(水、 真空) ... 73圖 4-30
L h =
30模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響(甘 油、真空) ... 73圖 4-31
L h =
30模態階數與流體環境於 Euler 梁理論中對頻率之影響(空氣、真 空) ... 74VII
圖 4-32
L h =
30模態階數與流體環境於 Euler 梁理論中對頻率之影響(水、真空)... 74
圖 4-33
L h =
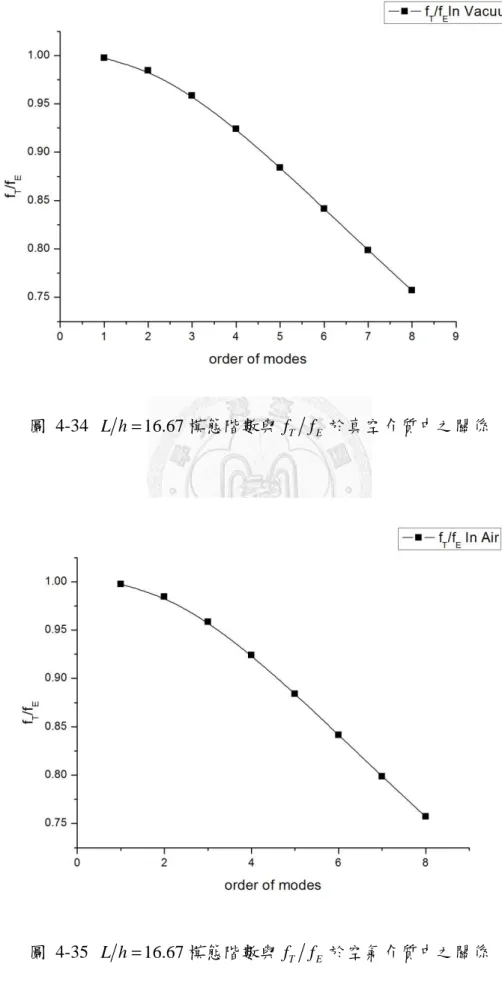
30模態階數與流體環境於 Euler 梁理論中對頻率之影響(甘油、真 空) ... 75圖 4-34
L h =
16.67模態階數與f
Tf
E 於真空介質中之關係 ... 79圖 4-35
L h =
16.67模態階數與f
Tf
E 於空氣介質中之關係 ... 79圖 4-36
L h =
16.67模態階數與f
Tf
E 於水介質中之關係 ... 80圖 4-37
L h =
16.67模態階數與f
Tf
E 於甘油介質中之關係 ... 80圖 4-38
L h =
16.67模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響 (空氣、真空) ... 82圖 4-39
L h =
16.67模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響 (水、真空) ... 83圖 4-40
L h =
16.67模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響 (甘油、真空) ... 83圖 4-41
L h =
16.67模態階數與流體環境於 Euler 梁理論中對頻率之影響(空氣、 真空) ... 84圖 4-42
L h =
16.67模態階數與流體環境於 Euler 梁理論中對頻率之影響(水、真 空) ... 84圖 4-43
L h =
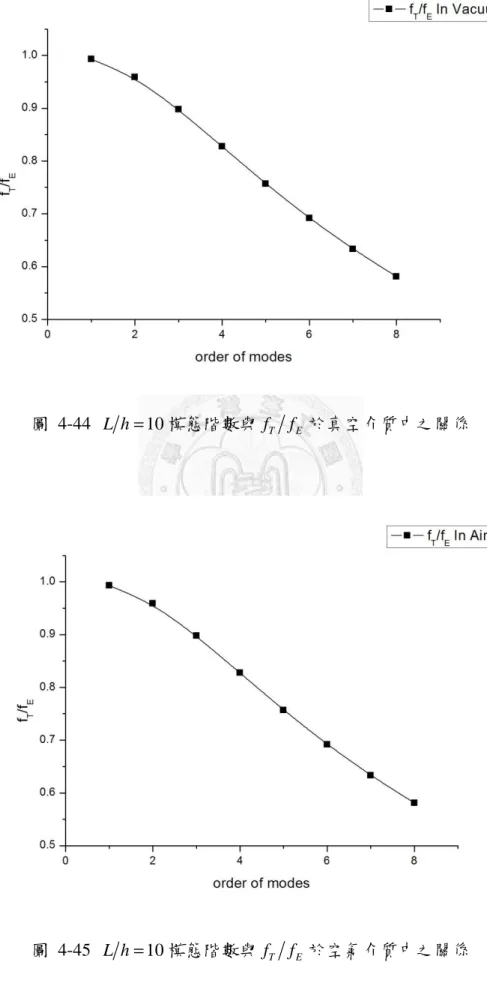
16.67模態階數與流體環境於 Euler 梁理論中對頻率之影響(甘油、 真空) ... 85圖 4-44
L h =
10模態階數與f
Tf
E 於真空介質中之關係 ... 89圖 4-45
L h =
10模態階數與f
Tf
E 於空氣介質中之關係 ... 89圖 4-46
L h =
10模態階數與f
Tf
E 於水介質中之關係 ... 90VIII
圖 4-47
L h =
10模態階數與f
Tf
E 於甘油介質中之關係 ... 90圖 4-48
L h = 10
模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響(空 氣、真空) ... 92圖 4-49
L h =
10模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響(水、 真空) ... 93圖 4-50
L h = 10
模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響(甘 油、真空) ... 93圖 4-51
L h =
10模態階數與流體環境於 Euler 梁理論中對頻率之影響(空氣、真 空) ... 94圖 4-52
L h =
10模態階數與流體環境於 Euler 梁理論中對頻率之影響(水、真空) ... 94圖 4-53
L h = 10
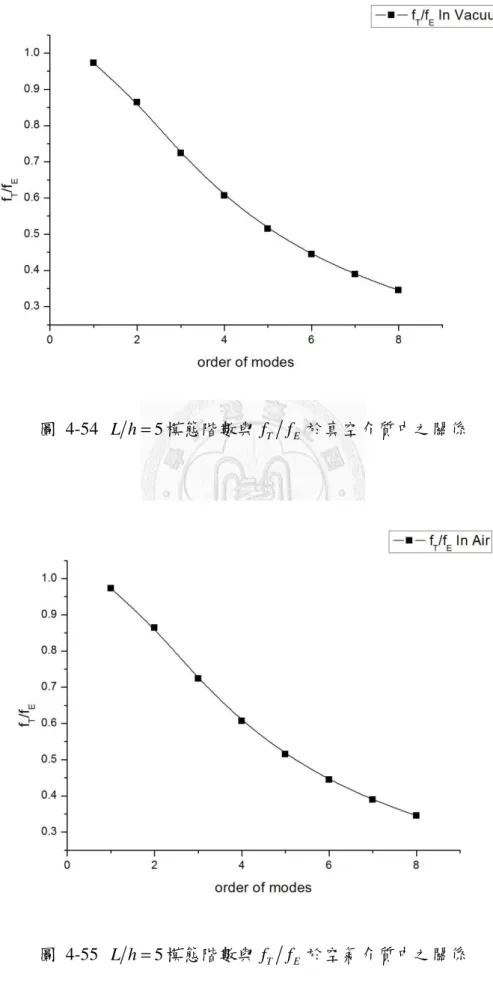
模態階數與流體環境於 Euler 梁理論中對頻率之影響(甘油、真 空) ... 95圖 4-54
L h =
5模態階數與f
Tf
E 於真空介質中之關係 ... 99圖 4-55
L h =
5模態階數與f
Tf
E 於空氣介質中之關係 ... 99圖 4-56
L h =
5模態階數與f
Tf
E 於水介質中之關係 ... 100圖 4-57
L h =
5模態階數與f
Tf
E 於甘油介質中之關係 ... 100圖 4-58
L h =
5模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響(空氣、 真空) ... 102圖 4-59
L h =
5模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響(水、 真空) ... 103圖 4-60
L h =
5模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響(甘油、 真空) ... 103 圖 4-61L h =
5模態階數與流體環境於 Euler 梁理論中對頻率之影響(空氣、真空)IX
... 104
圖 4-62
L h =
5模態階數與流體環境於 Euler 梁理論中對頻率之影響(水、真空) ... 104圖 4-63
L h =
5模態階數與流體環境於 Euler 梁理論中對頻率之影響(甘油、真空) ... 105圖 4-64 各尺寸模態階數與
f
Tf
E 於真空介質中之關係 ... 108圖 4-65 各尺寸模態階數與
f
Tf
E 於空氣介質中之關係 ... 108圖 4-66 各尺寸模態階數與
f
Tf
E 於水介質中之關係 ... 109圖 4-67 各尺寸模態階數與
f
Tf
E 於甘油介質中之關係 ... 109圖 4-68 各尺寸模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響(空氣、 真空) ... 110
圖 4-69 各尺寸模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響(水、 真空) ... 110
圖 4-70 各尺寸模態階數與流體環境於 Timoshenko 梁理論中對頻率之影響(甘油、 真空) ... 111
圖 4-71 各尺寸模態階數與流體環境於 Euler 梁理論中對頻率之影響(空氣、真空) ... 111
圖 4-72 各尺寸模態階數與流體環境於 Euler 梁理論中對頻率之影響(水、真空) ... 112
圖 4-73 各尺寸模態階數與流體環境於 Euler 梁理論中對頻率之影響(甘油、真空) ... 112
圖 4-74
L h = 10 ∆ m m = 10
−4於空氣介質中之頻率偏移 ... 116圖 4-75
L h = 10 ∆ m m = 10
−4於水介質中之頻率偏移 ... 116X
圖 4-76
L h = 10 ∆ m m = 10
−4於甘油介質中之頻率偏移 ... 117圖 4-77
L h = 16.67 ∆ m m = 10
−4於空氣介質中之頻率偏移 ... 117圖 4-78
L h = 16.67 ∆ m m = 10
−4於水介質中之頻率偏移 ... 118圖 4-79
L h = 16.67 ∆ m m = 10
−4於甘油介質中之頻率偏移 ... 118圖 4-80
L h = 30 ∆ m m = 10
−4於空氣介質中之頻率偏移... 119圖 4-81
L h = 30 ∆ m m = 10
−4於水介質中之頻率偏移... 119圖 4-82
L h = 30 ∆ m m = 10
−4於甘油介質中之頻率偏移... 120圖 4-83
L h = 10 ∆ m m = 10
−2於空氣介質中之頻率偏移 ... 120圖 4-84
L h = 10 ∆ m m = 10
−2於水介質中之頻率偏移 ... 121圖 4-85
L h = 10 ∆ m m = 10
−2於甘油介質中之頻率偏移 ... 121圖 4-86
L h = 16.67 ∆ m m = 10
−2於空氣介質中之頻率偏移 ... 122圖 4-87
L h = 16.67 ∆ m m = 10
−2於水介質中之頻率偏移 ... 122圖 4-88
L h = 16.67 ∆ m m = 10
−2於甘油介質中之頻率偏移 ... 123圖 4-89
L h = 30 ∆ m m = 10
−2於空氣介質中之頻率偏移... 123圖 4-90
L h = 30 ∆ m m = 10
−2於水介質中之頻率偏移... 124圖 4-91
L h = 30 ∆ m m = 10
−2於甘油介質中之頻率偏移... 124圖 4-92 額外質量與頻率偏移於 Timoshenko 梁理論之關係 ... 125
圖 4-93 額外質量與頻率偏移於 Euler 梁理論之關係 ... 125
圖 4-94
L h = 10 ∆ m m = 10
−4模態階數與兩理論頻率偏移差值比例之關係 .... 126圖 4-95
L h = 10 ∆ m m = 10
−2模態階數與兩理論頻率偏移差值比例之關係 .... 126XI
圖 4-96
L h = 16.67 ∆ m m = 10
−4模態階數與兩理論頻率偏移差值比例之關係... 127
圖 4-97
L h = 16.67 ∆ m m = 10
−2模態階數與兩理論頻率偏移差值比例之關係 ... 127圖 4-98
L h = 30 ∆ m m = 10
−4模態階數與兩理論頻率偏移差值比例之關係.... 128圖 4-99
L h = 30 ∆ m m = 10
−2模態階數與兩理論頻率偏移差值比例之關係.... 128圖 4-100
L h = 10 ∆ m m = 10
−4於 Timoshenko 梁理論之頻率偏移 ... 140圖 4-101
L h = 10 ∆ m m = 10
−2於 Timoshenko 梁理論之頻率偏移 ... 141圖 4-102
L h = 10 ∆ m m = 10
−4於 Euler 梁理論之頻率偏移 ... 141圖 4-103
L h = 10 ∆ m m = 10
−2於 Euler 梁理論之頻率偏移 ... 142圖 4-104
L h = 16.67 ∆ m m = 10
−4於 Timoshenko 梁理論之頻率偏移 ... 142圖 4-105
L h = 16.67 ∆ m m = 10
−2於 Timoshenko 梁理論之頻率偏移 ... 143圖 4-106
L h = 16.67 ∆ m m = 10
−4於 Euler 梁理論之頻率偏移 ... 143圖 4-107
L h = 16.67 ∆ m m = 10
−2於 Euler 梁理論之頻率偏移 ... 144圖 4-108
L h = 30 ∆ m m = 10
−4於 Timoshenko 梁理論之頻率偏移 ... 144圖 4-109
L h = 30 ∆ m m = 10
−2於 Timoshenko 梁理論之頻率偏移 ... 145圖 4-110
L h = 30 ∆ m m = 10
−4於 Euler 梁理論之頻率偏移 ... 145圖 4-111
L h = 30 ∆ m m = 10
−2於 Euler 梁理論之頻率偏移 ... 146圖 4-112
L h = 10 ∆ m m = 10
−2 與∆ m m = 10
−4 模 態 階 數 與 流 體 環 境 於 Timoshenko 梁理論中對頻率偏移之影響(水、空氣) ... 146XII
圖 4-113
L h = 10 ∆ m m = 10
−2 與∆ m m = 10
−4 模 態 階 數 與 流 體 環 境 於 Timoshenko 梁理論中對頻率偏移之影響(甘油、空氣) ... 147 圖 4-114L h = 10 ∆ m m = 10
−2與∆ m m = 10
−4模態階數與流體環境於 Euler 梁理論中對頻率偏移之影響(水、空氣) ... 147
圖 4-115
L h = 10 ∆ m m = 10
−2與∆ m m = 10
−4模態階數與流體環境於 Euler 梁理 論中對頻率偏移之影響(甘油、空氣) ... 148 圖 4-116L h = 16.67 ∆ m m = 10
−2 與∆ m m = 10
−4 模 態 階 數 與 流 體 環 境 於Timoshenko 梁理論中對頻率偏移之影響(水、空氣) ... 148 圖 4-117
L h = 16.67 ∆ m m = 10
−2 與∆ m m = 10
−4 模 態 階 數 與 流 體 環 境 於Timoshenko 梁理論中對頻率偏移之影響(甘油、空氣) ... 149 圖 4-118
L h = 16.67 ∆ m m = 10
−2與∆ m m = 10
−4模態階數與流體環境於 Euler 梁理論中對頻率偏移之影響(水、空氣) ... 149
圖 4-119
L h = 16.67 ∆ m m = 10
−2與∆ m m = 10
−4模態階數與流體環境於 Euler 梁 理論中對頻率偏移之影響(甘油、空氣) ... 150 圖 4-120L h = 30 ∆ m m = 10
−2 與∆ m m = 10
−4 模 態 階 數 與 流 體 環 境 於Timoshenko 梁理論中對頻率偏移之影響(水、空氣) ... 150 圖 4-121
L h = 30 ∆ m m = 10
−2 與∆ m m = 10
−4 模 態 階 數 與 流 體 環 境 於Timoshenko 梁理論中對頻率偏移之影響(甘油、空氣) ... 151 圖 4-122
L h = 30 ∆ m m = 10
−2與∆ m m = 10
−4模態階數與流體環境於 Euler 梁理論中對頻率偏移之影響(水、空氣) ... 151 圖 4-123
L h = 30 ∆ m m = 10
−2與∆ m m = 10
−4模態階數與流體環境於 Euler 梁理論中對頻率偏移之影響(甘油、空氣) ... 152
XIII
圖 4-124
L h =
10∆ m m = 10
−6於 Timoshenko 梁理論之頻率偏移 ... 159圖 4-125
L h =
10∆ m m = 10
−6於 Euler 梁理論之頻率偏移 ... 160圖 4-126
L h =
16.67∆ m m = 10
−6於 Timoshenko 梁理論之頻率偏移 ... 160圖 4-127
L h =
16.67∆ m m = 10
−6於 Euler 梁理論之頻率偏移 ... 161圖 4-128
L h =
30∆ m m = 10
−6於 Timoshenko 梁理論之頻率偏移 ... 161圖 4-129
L h =
30∆ m m = 10
−6於 Euler 梁理論之頻率偏移 ... 162XIV
表目錄 表目錄 表目錄 表目錄
表 3-1 多自由度梁邊界條件 ... 18
表 3-2 梁邊界條件之模態形狀及其特徵值[23] ... 19
表 4-1 梁靜態分析幾何材料參數表 ... 32
表 4-2 梁靜態分析撓度結果 ... 32
表 4-3 4-1-2 幾何材料參數表 ... 34
表 4-4
L = 300 µ m b , = 36 µ m
真空環境頻率比較(第一模態) ... 34表 4-5 [24]直接求解數值結果(第一模態) ... 36
表 4-6 4-1-3 幾何材料參數表 ... 37
表 4-7 與[24]比較結果 ... 37
表 4-8 理論驗證結構參數 ... 39
表 4-9 與[13]理論驗證結果(空氣) ... 40
表 4-10 與[13]理論驗證結果(水) ... 41
表 4-11 頻率偏移驗證結構參數 ... 43
表 4-12 頻率偏移驗證結果(h=1.1 m
µ
) ... 45表 4-13 續表 4-12 頻率偏移驗證結果(h=1.1 m
µ
) ... 46表 4-14 頻率偏移驗證結果(h=4 m
µ
) ... 47表 4-15 頻率偏移驗證結果(h=6.5 m
µ
) ... 48表 4-16 剪切模數與頻率關係之結構流體參數 ... 50
表 4-17 剪切模數 G 於各流體環境中之頻率(第一模態) ... 55
表 4-18 剪切模數與流體環境對頻率之影響(第一模態) ... 56
表 4-19 結構長度與厚度之比值與流體影響結構參數 ... 58
表 4-20 L h 於各流體環境中之頻率與
f
Tf
E 之比值(第一模態) ... 61表 4-21 續表 4-20 L h 於各流體環境中之頻率與
f
Tf
E 之比值(第一模態) ... 62XV
表 4-22 L h 與流體環境於兩理論對頻率之影響 ... 66
表 4-23
L h =
30模態階數與流體環境對頻率影響之結構參數 ... 68表 4-24
L h =
30各模態階數於各流體環境中之頻率與f
Tf
E 之比值 ... 71表 4-25 續表 4-24
L h =
30各模態階數於各流體環境中之頻率與f
Tf
E 之比值 72 表 4-26L h =
30流體環境對各模態中頻率之影響 ... 76表 4-27
L h =
16.67模態階數與流體環境對頻率影響之結構參數 ... 78表 4-28
L h =
16.67各模態階數於各流體環境中之頻率與f
Tf
E 之比值 ... 81表 4-29 續表 4-28
L h = 16.67
各模態階數於各流體環境中之頻率與f
Tf
E 之比值 ... 82表 4-30
L h =
16.67流體環境對各模態中頻率之影響 ... 86表 4-31
L h =
10模態階數與流體環境對頻率影響之結構參數 ... 88表 4-32
L h =
10各模態階數於各流體環境中之頻率與f
Tf
E 之比值 ... 91表 4-33 續表 4-32
L h =
10各模態階數於各流體環境中之頻率與f
Tf
E 之比值 92 表 4-34L h = 10
流體環境對各模態中頻率之影響 ... 96表 4-35
L h = 5
模態階數與流體環境對頻率影響之結構參數 ... 98表 4-36
L h =
5各模態階數於各流體環境中之頻率與f
Tf
E 之比值 ... 101表 4-37 續表 4-36
L h =
5各模態階數於各流體環境中之頻率與f
Tf
E 之比值 102 表 4-38L h =
5流體環境對各模態中頻率之影響 ... 106表 4-39 額外質量對頻率偏移影響之結構參數 ... 115
表 4-40
L h = 10 ∆ m m = 10
−4各模態階數於各流體環境中之頻率偏移與兩理論 差值比例 E T Tf f
f
∆ − ∆
∆
... 129 表 4-41 續表 4-40L h = 10 ∆ m m = 10
−4各模態階數於各流體環境中之頻率偏移XVI
與兩理論差值比例 E T
T
f f
f
∆ − ∆
∆
... 130 表 4-42L h = 10 ∆ m m = 10
−2各模態階數於各流體環境中之頻率偏移與兩理論差值比例 E T
T
f f
f
∆ − ∆
∆
... 131 表 4-43 續表 4-42L h = 10 ∆ m m = 10
−2各模態階數於各流體環境中之頻率偏移與兩理論差值比例 E T
T
f f
f
∆ − ∆
∆
... 132 表 4-44L h = 16.67 ∆ m m = 10
−4各模態階數於各流體環境中之頻率偏移與兩理論差值比例 E T
T
f f
f
∆ − ∆
∆
... 133 表 4-45 續表 4-44L h = 16.67 ∆ m m = 10
−4各模態階數於各流體環境中之頻率偏移與兩理論差值比例 E T
T
f f
f
∆ − ∆
∆
... 134 表 4-46L h = 16.67 ∆ m m = 10
−2各模態階數於各流體環境中之頻率偏移與兩理論差值比例 E T
T
f f
f
∆ − ∆
∆
... 135 表 4-47 續表 4-46L h = 16.67 ∆ m m = 10
−2各模態階數於各流體環境中之頻率偏移與兩理論差值比例 E T
T
f f
f
∆ − ∆
∆
... 136 表 4-48L h = 30 ∆ m m = 10
−4各模態階數於各流體環境中之頻率偏移與兩理論差值比例 E T
T
f f
f
∆ − ∆
∆
... 137 表 4-49 續表 4-48L h = 30 ∆ m m = 10
−4各模態階數於各流體環境中之頻率偏移與兩理論差值比例 E T
T
f f
f
∆ − ∆
∆
... 138 表 4-50L h = 30 ∆ m m = 10
−2各模態階數於各流體環境中之頻率偏移與兩理論差值比例 E T
T
f f
f
∆ − ∆
∆
... 139XVII
表 4-51 續表 4-50
L h = 30 ∆ m m = 10
−2各模態階數於各流體環境中之頻率偏移 與兩理論差值比例 E TT
f f
f
∆ − ∆
∆
... 140表 4-52
L h = 10 ∆ m m = 10
−4流體環境對各模態中頻率偏移之影響 ... 153表 4-53
L h = 10 ∆ m m = 10
−2流體環境對各模態中頻率偏移之影響 ... 154表 4-54
L h = 16.67 ∆ m m = 10
−4流體環境對各模態中頻率偏移之影響 ... 155表 4-55
L h = 16.67 ∆ m m = 10
−2流體環境對各模態中頻率偏移之影響 ... 156表 4-56
L h = 30 ∆ m m = 10
−4流體環境對各模態中頻率偏移之影響... 157表 4-57
L h = 30 ∆ m m = 10
−2流體環境對各模態中頻率偏移之影響... 158表 4-58
L h =
10∆ m m = 10
−6各模態階數於各流體環境中之頻率偏移 ... 163表 4-59
L h =
16.67∆ m m = 10
−6各模態階數於各流體環境中之頻率偏移 ... 164表 4-60
L h =
30∆ m m = 10
−6各模態階數於各流體環境中之頻率偏移 ... 165XVIII
符號表 符號表 符號表 符號表
符號 名稱
( )
∆ •
某物理量之變化量( ) • ˆ
某物理量之傅立葉轉換u
流體流速向量u
x 方向流速v
y 方向流速x 、 y
、 z 直角座標系t
時間p
流體壓力µ
流體黏滯係數ω
渦度向量w
渦度ψ
流線函數ω
頻率q
共軛諧和壓力C
b 流體內部(截面邊界)C
inf 流體外部(無限遠邊界)Ω
、 G 、Ψ
格林函數符號K
修正第二階貝索函數V
結構鉛直速度P
正規化後流體壓力降XIX
hydro
F
水力負載Γ
水力函數W
撓度η
梁的長度中正規化後的位置M
彎矩S
剪力f
梁受總外力m
梁結構單位長度質量ρ
s 梁結構密度A
梁截面面積E
楊氏係數I
面積慣性矩drive
f
驅動力L
梁結構長度φ
n 模態形狀T
時間函數λ
n 特徵值Η
n 頻率響應函數∆ m
額外質量β
剪切角ϕ
轉角G
剪切模數κ
面積修正因子XX
J
轉動慣量timoshenko
W
Timoshenko 梁理論靜態撓度euler
W
Euler 梁理論靜態撓度b
梁結構寬度h
梁結構厚度f
T Timoshenko 梁理論之頻率f
E Euler 梁理論之頻率vacuum
f
梁結構於真空中的頻率f
air 梁結構於空氣中的頻率water
f
梁結構於水中的頻率glycerin
f
梁結構於甘油中的頻率∆ f
頻率偏移1
第一章 第一章 第一章
第一章 緒論 緒論 緒論 緒論
1-1 研究動機與目的 研究動機與目的 研究動機與目的 研究動機與目的
近年來,生物醫學感測器的發展已相當完善,並運用在各種環境下做檢測。
其中微懸臂梁感測器(micro-cantilever sensor)是一重要的生醫感測元件。除了真空 運作外,其餘情況運作環境皆為在流體之中,如空氣、水以及各種溶液等。但在 流體環境下結構的振動易受到流體的影響,使得共振頻的量測品質(Q-factor)隨流 體黏滯性及密度大量下降,即儀器敏銳度降低。
本文將以微懸臂梁感測器做為探討重點,一般使用微懸臂梁感測器量測時,
皆是使用忽略剪切變形及轉動慣量影響的 Euler 梁理論做為其量測結果之估計值,
但由於時常會在微懸臂梁上鍍金膜,使其自我組裝(self-assembly)結合分子而造 成微懸臂梁撓曲,或是鍍上壓阻材料(piezo-resistive materials),當微懸臂梁產生 撓曲時,會造成壓阻材料電阻的變化,藉由電阻改變可得知微懸臂梁的撓曲量。
這些都會使得微懸臂梁之截面厚度增加;或是因需求而必須以高模態量測時,這 些情況都會使得 Euler 梁理論與實際情況產生一些差異。此時若以將剪切變形與 轉動慣量皆有考慮的 Timoshenko 梁理論來做為數據分析的理論基礎,其估計值 將會更符合實際情況。由於結構於流體中的振動易受流體的影響使得量測品質降 低,文獻上已發現此影響在低模態下較為嚴重,高模態下則變得較不明顯。
Timoshenko 梁於流體中振動受流體影響較少文獻提到,故本文目的為將 Euler 梁 在流體中的振動,延伸至 Timoshenko 梁,建立 Timoshenko 梁於流體環境中振動 理論,比較在不同流體中,低階至高階振頻的差異。另外亦比較兩種梁在額外附 加微小質量時所產生的頻率偏移的差異。
2
1-2 文獻回顧 文獻回顧 文獻回顧 文獻回顧
微 懸 臂 梁 感 測 器 之 應 用 的 構 想 源 自 於 原 子 力 顯 微 鏡 (atomic force microscope,AFM)。原子力顯微鏡探針是由微懸臂梁所構成,其原理是利用微小 探針與樣本表面間的交互作用造成微懸臂梁彎曲,再將雷射光投射在微懸臂梁末 端,量測雷射反射角度可得彎曲量,藉此描繪出樣本的表面輪廓。而微懸臂梁感 測器便是利用此偵測撓曲的作用機制。
微懸臂梁感測器可分為兩個不同型態的檢測方法:靜態與動態[1]。將探測 分子(receptor)結合於微懸臂梁上,當探測分子與另一待測的目標分子(analyte)結 合後,使得懸臂梁表面應力改變,造成懸臂梁的撓曲。Berger et al.[2]在微懸臂梁 上鍍金膜,金會與自我組裝(self-assembly)分子結合而造成微懸臂梁撓曲,從撓 曲量可以判別分子結合的量,此為靜態的量測方法。於動態量測則是量測其共振 頻率[3],由於分子結合在微懸臂梁之數目會影響其共振頻率,所以可由共振頻 率判別分子結合與否。此方法亦可做為質量感測器,將待測分子附著於微懸臂梁 表面上,藉由共振頻率的變化,量測待測分子的微小質量[4][5]。
為了能夠有效計算各種流體下流固耦合的理論分析,使用了黏滯流體分析水 力函數,再將水力函數耦合進結構的振動分析[6][7][8]。黏滯流體模型在 1969 年 Tuck[9]提出任意截面結構浸入黏滯流體,再將任意截面轉換為扁平梁邊界取得 水力負載。1998 年 Sader[10]提出耦合進入結構的水力函數。
近年來,對於短梁的研究也越來越多。1996 年 D. A. Walters 等人[11]於原子 力顯微鏡上以短梁做實驗,發現了以短梁做量測有其優點:對於熱效應產生的雜 訊較少、由於結構尺寸較短,共振頻率較高的原因,靈敏度較高,對樣本表面也 可施以較高的掃描速度。也有許多文獻是以 Timoshenko 模型對於微懸臂梁於原 子力顯微鏡中在真空情況下振盪之理論分析。
在理論(含數值模擬)方面,2007 年,J. C. Hsu 等人[12]即以 Timoshenko 梁理 論做為模型探討結構長度與厚度之比值對於梁自由端處有彈簧勁度作用之結構
3
的影響,以及彈簧勁度大小與 Timoshenko 梁頻率跟 Euler 梁頻率比值於第一至第 五模態的關係。2009 年,H. L. Lee 等人[13]同樣以 Timoshenko 梁理論做為探討 的模型,欲模擬原子力顯微鏡於流體中之行為,其中將流體黏滯性簡化為一阻尼 係數於梁結構自由端,以代表流體行為,但將流體的質量忽略不計,最後比較第 一至第四模態於有黏滯性環境下之 Timoshenko 梁頻率跟 Euler 梁頻率比值與不同 彈簧勁度的關係。2010 年,Ali Sadeghi 等人[14]以 Timoshenko 梁理論探討兩段 式錐形結構梁的振動行為,並比較彈簧勁度與非線性振動頻率跟線性振動頻率比 值之關係。2010 年,Hassan Zohoor 等人[15]以 Timoshenko 梁理論探討三段式匕 首狀結構梁的振動行為,並表明增加結構厚度與提高模態數會使得結構較為靈敏。
2012 年,Ali Sadeghi[16] 以 Timoshenko 梁理論探討 V 形梁結構梁的振動行為。
在實驗方面,2005 年,Søren Dohn 等人[17]以實驗量測一小金球於結構長度 方向上不同位置於第一至第四模態共振頻,並輔以軟體模擬,最後指出用於質量 感測器時,較高的模態可給予較高的靈敏度。同年(2005),Frederic Lochon 等人 [18]指出最為影響質量感測器中靈敏度的就是結構共振頻的大小,其數值(即頻率) 越高則靈敏度就越高。提高量測時的運作頻率之方法有改變結構的勁度或讓量測 處於高模態之下。但若將其結構長度縮短來提高運作頻率,則塗附在結構表面上 的感測層相對困難,故提高頻率最為單純的方法就是提高模態。2007 年,Murali Krishna Ghatkesar 等人[19]量測微懸臂梁上塗附不同厚度的金層之頻率,同樣也 指出其靈敏度隨著模態階數的增加而增加。2008 年,Murali Krishna Ghatkesar 等人[20]將微懸臂梁置於流體環境中量測第一至第十六模態之共振頻。
本文與 2009 年[13]此篇的不同在於本文並無將流體質量忽略並且將流場行 為實際以 Stokes 方程考慮與結構之耦合。即實際將流場行為考慮過後並與 Timoshenko 梁結構耦合。將之浸於空氣、水、甘油三種不同的流體介質中,分 析其流固耦合系統於不同流體介質中各個模態之共振頻,並比較與 Euler 梁理論 之差異;及額外質量對頻率偏移的影響。
4
1-3 論文架構 論文架構 論文架構 論文架構
第一章:緒論,說明研究動機及目的,介紹目前研究背景及重要文獻。
第二章:黏滯流體水力函數的推導。
第三章:流固耦合的振動分析。將結構分為 Euler 梁及 Timoshenko 梁,分別介紹 其結構振動模型,將水力函數耦合進結構內建立流固耦合系統,及額外質量對頻 率偏移量的影響。
第四章:藉由物理行為及文獻中的數值數據與本文理論數值結果進行驗證。數值 結果的呈現,以尺寸做為分類,分別探討於各尺寸之間兩理論的差異與流體對結 構自然頻率的影響。
第五章:結論與未來工作。
5
第二章 第二章 第二章
第二章 黏滯流體水力函數 黏滯流體水力函數 黏滯流體水力函數 黏滯流體水力函數
本章節探討結構浸入黏滯流體時,結構的固體力學會使得流速、壓力、密度、
黏滯力等物理性質出現變化,而這些流場行為同樣會導致固體出現變形、慣性或 消散等效應,對於這些行為可視為結構額外增加的一個負載,此負載稱做水力負 載(hydrodynamic loading)。
ㄧ般在分析流固耦合的振動問題時,重點在於尋求流場統御方程式與固體統 御方程式之間的相依關係,本文中首先會將結構的振動行為納入流場統御方程式 中求解水力負載,待決定水力負載形式後在與結構振動統御方程式結合,描述流 固耦合的振動行為。因此本文在分析過程中,決定流體控制方程,求解水力負載 乃首要工作。
分為兩個部分,首先推導在黏滯流體下任意截面振動的勢流函數。其統御方 程式主要由 Navier-Stokes’方程開始,藉由格林函數(Green’s function)求解,中間 引入共軛諧和壓力(conjugate harmonic pressure),增加額外所需的格林方程及轉 換未知數,進而得到勢流函數。第二部分,將單梁任意截面轉為扁平梁,藉由邊 界條件來獲得梁上的壓力分佈,最後得到水力函數。
2-1 黏滯流體下任意截面流固耦合 黏滯流體下任意截面流固耦合 黏滯流體下任意截面流固耦合 黏滯流體下任意截面流固耦合
在此章節中,首先介紹無限長任意截面梁,在不可壓縮史托克流體(Stokes flow)中進行微小振動下流固耦合的情況。主要引用自 1969 年 Tuck[9]的理論,此 理論使用格林函數處理線性化後的 Navier-Stokes’方程,過程中使用柯西萊曼方 程(Cauchy-Riemann function)將諧和函數壓力轉換成共軛諧和壓力,並藉此將四 階流線方程拆解後,與物理性質做結合,即可求得任意等截面梁在史托克流體中 的勢流方程。
6
在二維卡氏直角座標下,假設流體速度
u = u x y t i (
, ,) + v x y t j (
, ,)
,以及壓力(
, ,)
p x y t ,並假設結構在黏滯流體中振動的振幅極小,則 Navier-Stokes 方程則
可線性化後簡化為史托克方程(Stokes equation)
p
2ρ ∂ = −∇ + ∇ t µ
∂
u u
(2.1.1)其中
ρ
為流體密度,µ
為流體黏滯係數。以及由質量守恆推導而出的流體連續方程,在不可壓縮流中可寫為
∇ ⋅ = u
0 (2.1.2)對(2.1.1)式中等號兩邊同取旋度,
ω = ∇× u
,可寫為2
ρ ∂ = ∇ t µ
∂
ω ω
(2.1.3)藉由柯西萊曼方程,在不可壓縮流下的連續方程,可將流速以勢流方程改寫
,
u v
y x
ψ ψ
∂ ∂
= = −
∂ ∂
(2.1.4)由於
ω
為卡氏直角座標中z
方向之渦度,由(2.1.4)之關係可寫為( )
2 2
2
2 2
v u
x y x y w
ψ ψ ψ
∂ ∂
∂ ∂
= ∇× =
−
= −
+
= −∇ =
∂ ∂ ∂ ∂
ω u z z z z
(2.1.5)將之與(2.1.3)合併
( , , )
2( , , )
w x y t
w x y t ρ ∂ t = ∇ µ
∂
(2.1.6)再經由傅立葉轉換(Fourier transform)後,由時域轉換成頻率域
( ) ( )
2 2
, | , |
w x y ω α w x y ω
∇ =
(2.1.7)其中 2
i , 1 ωρ i
α = µ = −
,ω
為角頻率。把(2.1.5)代入(2.1.7),則可以得到在流 體中流線的統御方程式( ) ( )
4 2 2
, | , |
x y x y
ψ ω α ψ ω
∇ = ∇
(2.1.8)另一方面,對線性化後的史托克方程(2.1.1)等號兩邊同取散度,配合連續方 程式(2.1.2),並經由傅立葉轉換可得到壓力
p
為諧和函數(harmonic function)並滿7
足拉普拉斯方程(Laplace equation)
( )
2
p x y , | ω 0
∇ =
(2.1.9)如此一來,可將共軛諧和壓力
q x y (
, |ω )
引入,且滿足拉普拉斯方程(2.1.10),且同時必滿足柯西萊曼方程(2.1.11)。
( )
2
q x y , | ω 0
∇ =
(2.1.10)p q , p q
x y y x
∂ = ∂ ∂ = − ∂
∂ ∂ ∂ ∂
(2.1.11)由頻率域的史托克方程(2.1.1),並配合柯西萊曼方程(2.1.11),經由整理可將
q
以渦度 w 及勢流函數ψ
表示,可得( , | ) ( , | )
2( , | )
q x y ω = − µ w x y ω α ψ + x y ω
(2.1.12) 如圖 2-1 所示,標示任意截面浸入流體的邊界條件。假設在無窮域外的流體 速度趨近於零u →
0,並假設其梁表面的流體流速與梁本身振動速度相同。其中C
b與C
inf分別表示流體內部(截面邊界)與外部(無限遠)的邊界,座標原點位於整 個截面的中心。圖 2-1 梁任意截面及其邊界條件示意圖ㄧ[21]
8
接著利用格林函數(Green’s function method)來求解(2.1.7)與(2.1.10),分別令
( x y x y , | ', ' )
Ω
及G x y x y ( , | ', ' )
為(2.1.13)及(2.1.14)的解( ) ( )
2 2
' '
x x y y
α δ δ
∇ Ω − Ω = − −
(2.1.13)( ) ( )
2
G δ x x ' δ y y '
∇ = − −
(2.1.14)則可將
w x y ( , | ω )
及q x y ( , | ω )
表示為( ) ( ) ( )
( ) ( )
, | ', ' | , | ', '
', ' | , | ', '
C n
n
w x y w x y x y x y
w x y x y x y dl
ω ω
ω
=
Ω −
Ω
∫
(2.1.15)( ) ( ) ( )
( ) ( )
, | ', ' | , | ', '
', ' | , | ', '
C n
n
q x y q x y G x y x y
q x y G x y x y dl
ω ω
ω
=
−
∫
(2.1.16)其中
( ) x y ,
表示流場中的位置,( x y ', ' )
為梁截面邊界的位置,下標 n 表示對 邊界 C 的法向量做偏微分,方向朝外,Ω ( x y x y , | ', ' )
與G x y x y ( , | ', ' )
皆為格林函數,並可分別求得為
( )
0( )
, | ', ' 1
x y x y 2 K α R
Ω = − π
(2.1.17)( , | ', ' ) 1 ln
G x y x y 2 R
= π
(2.1.18)其中
R = ( x − x
') (
2+ y − y
')
2 ,K
0為修正第二階貝索函數(modified Bessel function of the second kind)。將(2.1.12)代入(2.1.16)並配合(2.1.15)可得到完整的勢 流方程( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
, | ', ' | , | ', ' ', ' | , | ', '
', ' | , | ', ' ', ' | , | ', '
n n
C
n n
C
x y x y G x y x y x y G x y x y dl
w x y x y x y w x y x y x y dl
ψ ω ψ ω ψ ω
ω ω
= −
− Ψ − Ψ
∫
∫
(2.1.19)其中
( ) ( ) ( )
( )
2
2 0
, | ', ' 1 , | ', ' , | ', '
1 ln 2
x y x y x y x y G x y x y
R K R
α πα α
Ψ =
Ω −
= −
+
(2.1.20)
9
(2.1.20)恰為吻合(2.1.8)之格林函數。配合圖 2-2,可知(2.1.19)中
ψ
及ψ
n為已知,但 w 與
w
n於截面邊界上為未知。為了將未知數以有效的物理量表示,配合(2.1.11)及(2.1.12)把
w
n以壓力代換2
2
1 1
n n n
n l
w q
p α ψ µ α ψ µ
= − −
= − −
(2.1.21)
圖 2-2 梁任意截面及其邊界條件示意圖二[9]
其中 l
p q
p l n
∂ ∂
= =
∂ ∂
為壓力在邊界 C 上對切線方向的微分,將(2.1.21)代入 (2.1.19),由分部積分,及假設邊界上之壓力為連續,可將(2.1.19)改寫成( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
, | ', ' | , | ', ' ', ' | , | ', '
', ' | , | ', ' 1 ', ' | , | ', '
n n
C
n l
C
x y x y G x y x y x y x y x y dl
w x y x y x y p x y x y x y dl
ψ ω ψ ω ψ ω
ω ω
µ
=
− Ω
−
Ψ − Ψ
∫
∫
(2.1.22)此為在黏滯流體下之任意等截面梁振動完整勢流函數。
2-2 黏滯流體下扁平 黏滯流體下扁平 黏滯流體下扁平 黏滯流體下扁平
在此節,將上ㄧ節所得到的任意截面 換為扁平梁邊界,並假設此
由(2.1.22)觀察可以得知勢流函數
及壓力 p 影響,由於在流體無限遠處之區段 對本文所要探討的梁截面邊界無影響
C
b。圖
考慮扁平梁為剛體,
振動速度相同。由於壓力 方程(2.1.22)可簡化為
( , | ', ' | , | ', '
', ' | , | ', '
C
x y w x y x y x y dl
ψ ω ω
− ∫ ∆ Ψ
其中
w w
|Cw
|C+ −
∆ = −
10
黏滯流體下扁平 黏滯流體下扁平 黏滯流體下扁平
黏滯流體下扁平梁 梁 梁 梁的水力負載 的水力負載 的水力負載 的水力負載
節所得到的任意截面梁振動之勢流函數由任意截面 並假設此梁極薄,如圖 2-3 所示。
觀察可以得知勢流函數
ψ ( x y , | ω )
僅僅只受封閉曲線由於在流體無限遠處之區段
C
inf的流速為零,並因壓力亦為連續 截面邊界無影響,故後續的推導皆僅考慮截面邊界線段圖 2-3 扁平梁上下邊界條件[22]
,上下邊界無相對移動,在微小振動下,假設流速與結構 由於壓力 p 與渦度 w 在梁的上下不連續,則對流線函數的線積分
) ( ) ( )
( ) ( )
, | ', ' | , | ', '
1 ', ' | , | ', '
C n
C l
x y w x y x y x y dl
p x y x y x y dl
ψ ω ω
µ ω
−
−
= ∆ Ψ
− ∆ Ψ
∫
∫
|C |C
+ −,
p p
|Cp
|C+ −
∆ = −
分別為梁上下的渦度差與壓力差 振動之勢流函數由任意截面梁邊界轉僅僅只受封閉曲線 C 上之渦度 w
並因壓力亦為連續,
故後續的推導皆僅考慮截面邊界線段
假設流速與結構 則對流線函數的線積分
(2.2.1)
上下的渦度差與壓力差。將
11
邊界 C 的法向量與切線向量與直角座標做轉換, dl
= dx
,n y
∂ = ∂
∂ ∂
。且假設薄梁 寬度為( − b , 0 ) ( ) → b , 0
,可將(2.2.1)式改寫為( ) ( ) ( )
( ) ( )
'
'
, | ' | , | ', 0 '
1 ' | , | ', 0 '
b b y
b b x
x y w x x y x dx
p x x y x dx
ψ ω ω
µ ω
−
−
=
∆ Ψ
−
∆ Ψ
∫
∫
(2.2.2)由(2.1.20)式可以得知,在
y = 0
的位置時Ψ
y'( x , 0 | ', 0 x ) = 0
,即可將(2.2.2) 化簡為( x , 0 | )
bb1 p x ( ' | ) (
x'x , 0 | ', 0 x ) dx '
ψ ω ω
µ
−
= − ∆ Ψ
∫
(2.2.3)本文所探討的振動是指沿著 y 軸方向的垂直上下振動,因此只著重於 y 方向 的流速,不考慮 x 方向的水平流速。由(2.1.4)可以得知 y 方向的流速為
( )
x( , 0 | )
bb1 ( ' | )
x x'( , 0 | ', 0 ) '
V x ψ x ω p x ω x x dx
µ
−
= − = ∆ Ψ
∫
(2.2.4)整理後可改寫為
( )
bb(
' |) (
')
'V x p x L x x dx
µ = ∫
− ∆ ω α −
(2.2.5)其中
L ( α x
'− x ) = Ψ
x x' 為核心函數(kernel function),其形式為( )
22 0( )
1 ln
2
L z d z K z
π dz
=
+
(2.2.6)為了之後做數值計算的方便性,令一個無因次化參數
x
ξ = b
及 y 方向垂直振 動速度V x ( ) = V
0= const .
。經由整理後可得( )
21
1 ' |
i b
' ' 1P ξ ω L ρω ξ ξ d ξ µ
−
−
=
∫
(2.2.7)其中正規化後的壓力降
( ) ( )
0
' | b p x ' |
P V
ξ ω ω
µ
= ∆
,可將上式視為兩函數相乘,12
離散化後,一半為可解析部分,壓力降部分則為未知,將可解析部分做反矩陣運 算即可求得流體在各個區間施加在扁平梁上的壓力。
( )
''11 2
0
' | j ' ' 1
j
N j j
i b
P
ξL d
ξ
ξ ω ρω ξ ξ ξ
µ
− +
=
− =
∑ ∫
(2.2.8)由於在數值計算上會出現三個奇異點,分別為 1.
ξ ξ = '
時。2. 位於梁寬度兩端
ξ = ± 1
的壓力值。3. 當
b
2ρω
µ
值太高時,整個積分式會連帶未知壓力ㄧ起快速衰退至 0。其中解決方式分別為 1. 令
ξ
k= 1 2 ( ξ ξ
k'+
k'+1)
。2. 使得區間不均等,可設為 'j
cos j , 1, 2,...,
j N
N
ξ = − π =
。3. 藉由增加區間來達到需要的數值解,即為加大 N 值。
如此就可以將(2.2.8)寫成矩陣形式。
1
0
1 , 0,1,..., 1
N j kj j
P A k N
−
=
= = −
∑
(2.2.9)其中
( ) ( )
' 1 '
2
' '
1
' '
1 , , , , , , , , , ,
2
j j
kj k
j k j k
i b
A L d
F b F b
ξ
ξ
ρω ξ ξ ξ
µ
µ ρ ω ξ ξ µ ρ ω ξ ξ π
+
+
= −
= −
∫
(2.2.10)
以及
( )
( )
'
2 2
' '
2 ' 1
, , , , ,
1 sgn
j k
j k j k
j k
F b
i b b
i i K i i
b
µ ρ ω ξ ξ
µ ξ ξ ρω ξ ξ ρω
ρω ξ ξ µ µ
= + − − −
−
(2.2.11)
如此ㄧ來壓力降
P ( ξ ω ' | )
就可以藉由將[ ] A
進行反矩陣得到13
[ ] [ ]
[ ] [ ]
1 1
1
V 1 1 1
T T
N N
T
N N N
A P
× ×
× ×
=
=
⋯
(2.2.12)
[ ] [ ] [ ] P
T= A
−1 VT (2.2.13)同時也意味著,當梁浸入黏滯流振動時,流體對梁振動造成影響的水力負載 (hydrodynamic loading)
F
hydro也可以藉著將施加在梁上的壓力沿著 x 方向與梁接 觸的範圍做積分而得到。( )
0 11( )
2 2(
') ( )
ˆhydro | ' | ' , , , , j, k ˆ |
f η ω = µ V ∫
−P ξ ω ξ d = ρπ ω b Γ µ ρ ω ξ ξ b W η ω
(2.2.14) 其中W ( η ω | )
為在頻率域中,正規化後之梁的撓度,η
為沿著梁的長度中正 規化的位置。Γ ( µ ρ ω ξ ξ
, , , ,b
'j, k)
為水力函數(hydrodynamic finction)。(
')
2 11( )
2 1( ) (
1)
0
, , , , , ' | ' ' |
N
j k j j j
j
i i
b P d P
b b
µ µ
µ ρ ω ξ ξ ξ ω ξ ξ ω ξ ξ
ωρπ ωρπ
−
− = +
Γ = ∫ ≈ ∑ −
(2.2.15)