行政院國家科學委員會專題研究計畫 成果報告
以光達、差分雷達、及空照產製數值高程模型及數值覆蓋模
型研究(I)
計畫類別: 個別型計畫 計畫編號: NSC91-2211-E-009-056- 執行期間: 91 年 08 月 01 日至 92 年 07 月 31 日 執行單位: 國立交通大學土木工程學系 計畫主持人: 史天元 計畫參與人員: 劉榮寬 報告類型: 精簡報告 處理方式: 本計畫可公開查詢中 華 民 國 92 年 11 月 1 日
行政院國家科學委員會專題研究計畫成果報告
以光達、差分雷達、及空照產製數值高程模型及數值覆蓋模型研究
On the Construction of Digital Elevation Model and Digital Surface
Model with InSAR, and Aerial Photos
計畫編號:NSC-91-2211-E-009-056
執行期限:91 年 8 月 1 日至 92 年 7 月 31 日
主持人:史天元 國立交通大學土木工程學系
計畫參與人員:劉榮寬 國立交通大學土木工程學系
一、中文摘要 本研究比較空載雷射掃描所得數據與航空攝影測量經自動匹配所得高程, 用以探討此兩種數據源之特性,並相互比對其成果之差異。本研究使用農委會於 民國九十一年於新竹縣竹北地區所掃描之數據,該數據之高程性質為橢球高,需 化算為正高方可比較。為求於相同之高程基準進行比較,航空攝影測量數據亦採 用正高值進行空中三角解算,航空照片像比例尺為 1/5,000。經比對後發現,未 經人工修正之自動匹配方式生成數值覆蓋模型中含有因匹配不當所產生之大誤 差;空載雷射掃描儀數據亦有高程分類不當之處。 關鍵字:影像匹配、數值覆蓋模型 ABSTRACTThis study compares the height information obtained from airborne lidar with those obtained from aerial photogrammetric operation with automated image matching. The lidar data utilized in this study is the Chu-Pei area data set collected in 2002 by the Council of Agriculture. The height obtained is the ellipsoid height in the WGS84 coordinate system. These heights are converted into the orthometric height then compared with those produced with photogrammetric methods. The photo scale is 1/5000. It is found that there are many problems in the photogrammetric data set generated with image matching. However, there are vegetation removal errors in the lidar dataset as well.
二、前言 本計畫為期三年,執行期程由九十一年八月一日至九十四年七月三十一 日。本年度為此三年期計畫的第一年,工作重點包括:一、空載雷射掃描數據的 取得;二、以自動相關技術方式產生數值覆蓋模型;三、空載雷射掃描與航空測 量數據高程精度比較。因此,本年度期末報告之重點定位在”空載雷射掃描與航 空測量數據高程精度比較之研究”。 目前大面積地形測量之主要作業型態,包括以類比、解析、或數位立體製 圖儀,並利用航照立體像對繪製線形圖、等高線、及錄製高程點。由於儀器之發 展,尤其是全球定位系統(Global Positioning System, GPS)以及慣性導航系統 (Inertial Navigation System, INS)之結合,數值高程模型及數值覆蓋模型之產 製,亦有了新的作業方式。其中,空載雷射掃描 (Airborne Laser Scanning, ALS or LIght Detection And Ranging, LIDAR 光達)採用主動式雷射光進行高速掃描測 距,差分雷達(Interferometric SAR, InSAR)則應用雷達干涉之原理產生干涉條紋 (Fringes)進而求解高差,為目前較具應用價值者。
空載雷射掃描技術為一種以掃描方式進行測距的系統,可用以產生高精 度、高解析度的數值覆蓋模型(Digital Surface Model, DSM)。目前較成熟之商 業化系統包含加拿大之 Optech ALTM、Leica/LH Systems ALS、EnerQuest RAMs 及瑞典 SAAB Topeye 等。本研究所使用的資料為農委會使用 Leica/LH ALS40 Systems 於 2002 年四月間,所獲得之新竹地區雷射掃描資料。由於其高密度及穿 透性,可同時測得地面及覆蓋面之測點資料,而雷射掃描多重回應(Multi Return) 的特性,更可提供建物牆面或森林地面等以傳統攝影測量較難獲得之數據(賴志 恆,2003)。
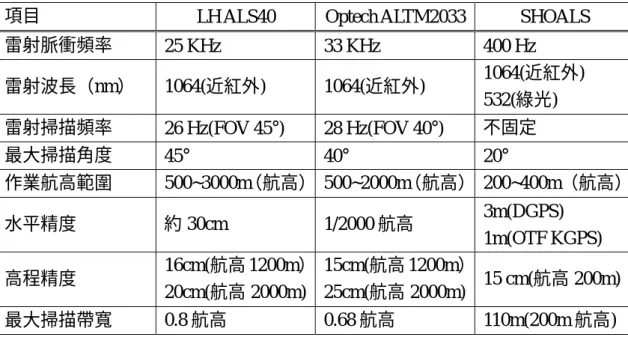
表 1. 空載雷射掃描儀器規格(Cunningham, et al, 1998; Irish & Lillycrop, 1999; 史 與彭,2002)
項目 LH ALS40 Optech ALTM2033 SHOALS
雷射脈衝頻率 25 KHz 33 KHz 400 Hz 雷射波長(nm) 1064(近紅外) 1064(近紅外) 1064(近紅外) 532(綠光) 雷射掃描頻率 26 Hz(FOV 45°) 28 Hz(FOV 40°) 不固定 最大掃描角度 45° 40° 20° 作業航高範圍 500~3000m(航高) 500~2000m(航高) 200~400m(航高) 水平精度 約 30cm 1/2000 航高 3m(DGPS) 1m(OTF KGPS) 高程精度 16cm(航高 1200m) 20cm(航高 2000m) 15cm(航高 1200m) 25cm(航高 2000m) 15 cm(航高 200m) 最大掃描帶寬 0.8 航高 0.68 航高 110m(200m 航高) 空載雷射掃描技術基本上為一個結合雷射系統(laser system)、全球定位系
統(GPS)以及慣性導航系統(INS)等三部分的整合性技術。雷射掃描儀固定 於飛行器上,發射一高頻雷射光束,掃描儀記錄發射脈衝到接收反射訊號之間的 時間差。配合在飛機上裝置之 GPS 接收儀,及待測區的控制站,以動態差分方 式實施 GPS 定位,而 INS 則用以與 GPS 整合求解,求定載台的方位。 空載雷射掃描儀目前使用之脈衝雷射波長多在近紅外光範圍,亦有使用綠 光波段者(如主要用於近岸水深測量之 SHOALS 系統),目前主要的空載雷射掃 描系統其主要規格如表 1 所示。記錄發射之訊號經過地面漫射、反射後的回波, 再轉換為距離。載台以動態差分方式實施 GPS 定位(如圖 1.a;徐逢亮,1999), 同時利用 INS 獲取慣性姿態參數,整合雷射掃描測距而獲得點位三維座標。 每一次掃描(掃描方式如圖1.b所示)皆建立自雷射載台至地面反射點間之空 間向量,整合距離、位置、姿態以及座標之資料,進而推導出地面投影之三維座 標(XP, YP, ZP),並同時記錄其反射強度值(Intensity)。目前的系統飛行高度由20 至6000公尺不等,大部分皆在200至1000公尺之間(Baltsavias, 1999a)。掃描角度 通常小於±30°,多數系統掃描角度約小於±20°。 a.DGPS精密的動態定位 b. 掃描方式 圖1. 空載雷射掃描儀DGPS定位及掃描方式(徐逢亮,1999) 因此,空載雷射掃描數據的精度便與其三個組成系統息息相關。我們可歸 結下列五項影響空載雷射掃描數據的要素(Maas, 2002): 1. 斜距的量測精度:主要取決於雷射發射與接收間的時間精度,這項 要素主要影響數據的高程精度。 2. 雷射系統掃描角解析力及機械的震動影響:這項要素主要影響數據 的平面精度。 3. GPS 的精度:GPS 決定了飛機與感測器的位置,因此對三維座標之 解算均有影響。 4. INS/GPS 系統整合之精度:INS/GPS 整合系統用以內差及平滑載體 軌道,因此 INS 的誤差主要影響數據的平面精度。 5. 雷射系統、載體、及 GPS/INS 間的校準誤差:此項要素將造成雷射 數據的偏移系統誤差。
本研究最主要之目的在於比較空載雷射掃描所得數據與航空攝影測量經自 動匹配所得高程,用以探討此兩種數據源之特性,並相互比對其成果之差異。 三、實驗區數據 本研究所採用之空載雷射掃描數據為農委會於九十一年四月空載雷射掃描 計 畫 所 獲 取 之 新 竹 地 區 資 料 , 其 涵 蓋 範 圍 如 圖 2 所 示, 面 積約 為 50km2 (10km×5km)。所採用之雷射掃描系統為 LH ALS40,相關飛航資料如下:飛航 高度離地面約為 800 公尺、飛機速度為 125 節(約 230 km/hr)、FOV 為 35 度(地 面涵蓋 1092 公尺)、掃描頻率 29.4Hz、雷射脈衝 38KHz、東西向計 11 條航帶、 南北向 1 條航帶。 空載雷射掃描所測得之資料為高精度之數值覆蓋模型,本地區所得之原始 掃描資料檔案約為 4 Gigabytes(點數共計 120,621,907 點),記錄方式為反射訊號 之 E、N、H、及反射強度值 I。除了原始雷射掃描點資料檔外,本研究同時取得 了經分離技術處理的地面(ground)與覆蓋(surface)資料檔,用以評估原始雷 射資料分離的正確性。由於雷射掃描點高密度的特性,計算量相當龐大,為便於 計算,選取了 2.4km 長及 1.2km 寬的區域作為試作區。如圖 2 中之紫色矩形區, 選取此試作區的原因,主要是因本研究同時取得此地區於九十年執行之璞玉計畫 (璞玉計畫為交大竹北校區計畫)的航照資料、地形圖、及 5 公尺 DEM 等。 圖2.新竹地區空載雷射掃描資料涵蓋及實驗區示意圖 本研究所採用之數據型態與基本資料如表 2 所示,各項資料說明如下: 1. 空載雷射掃描(全部):為試作區之空載雷射掃描資料點,包括未經分離處 理之全部點資料(如圖 3 所示為試作區之全部點雲(Point cloud)資料),及 經分離處理之地面(ground)與覆蓋(surface)空載雷射掃描數據,並將橢 球高轉換為正高。
圖3. 試作區之所有空載雷射掃描資料點
2. 自動匹配生成之 DSM:為試作區利用 PCI Geomatics V8.2.3 OrthoEngine 模 組,以自動匹配技術產生之 DSM,共計六模。原生成之 DSM 乃是以平面間 距 2 個像元匹配,為減少運算量,將其轉為平面間距約為 1m 之 ASCII(以 X、 Y、Z 之格式儲存)檔。 3. 璞玉計畫提供之 DEM:為璞玉計畫執行單位提供之 5m 解析度 DEM(圖 4), 由於其平面取樣間格與前述資料差異太大,故於高程比較計算前,利用 Surfer7.0(Golden Software, 1997)程式將其內插為 2.5m 之取樣間格。該檔案 原以 TWD67 座標儲存,因此需轉換為 TWD97 座標系統以利比較。 圖3. 試作區璞玉計畫5m解析度DEM
4. 璞玉計畫地面控制點:為執行璞玉計畫以 GPS 施測之地面控制點資料,涵蓋 新竹地區空載雷射掃描區域共計 41 點,考量地面控制點密度較疏,因此在高 程比較計算時,納入新竹地區全部空載雷射掃描資料計算。 雷射掃描數據其分佈相當密集,一般採用點密度來表示點雲資料分佈的密 度,因此點密度定義為資料點數目除以資料範圍的面積(賴志恆,2003)。表 2 中“數據型態表示”是為在不同數據間高程比較時方便展示之考量,如以 Laser_A 代表所有空載雷射掃描資料點,以 Match 代表自動匹配生成之 DSM 等。 正高改正中大地起伏值(undulation)之計算採用內插程式 geoidint.f 計算而 得(Hwang, 1997;內政部,2001)。此程式可將大地起伏網格值內插任一位置(輸 入十進位之經緯度值),而參考之大地起伏網格檔(twgeoido1.grd3)亦由黃金維 教授所提供,為 30〞×30〞之解析度(內政部,2001),此網格與實測大地起伏 比較,在西部平原可達公分及之精度(Hwang, 1997)。將橢球高減去內插計算所 得之大地起伏值,即可得正高。 表 2.使用數據說明 數據型態 點數 點密度(pts/m2 ) 平面座標系統 高程 數據型態表示 空載雷射掃描(全部) 6,622,431 2.30 WGS84 橢球高 Laser_A 空載雷射掃描(地面) 867,858 0.30 WGS84 橢球高 Laser_G 空載雷射掃描(覆蓋) 971,657 0.34 WGS84 橢球高 Laser_S 自動匹配生成之 DSM 340,202 0.12 TWD97 正高 Match 璞玉計畫提供之 DEM 116,886 0.04 TWD67 正高 Puyu_DEM 四、結果與分析 如表 3 所示,為各種數據組間高程資料相互比較之統計資料,比較方式為 在兩組數據中找到相同之平面位置後,取出高程值相減(後者減前者),再計算 其各項統計資料(如 1、2、3 式)。由於每種數據特性不同,取樣間距亦不同, 很難在兩種不同特性數據中找到相同之平面位置。因此在實際運算時,除全部雷 射掃描數據與璞玉計畫地面控制點的高程值比較(Laser_A/Puyu_GCP)採較高 搜尋半徑外,將所謂的“相同”放寬為 0.1m,也就是說兩組數據中點和點之距離 小於 0.1m 時,便視為相同點,採 0.1m 之理由為璞玉計畫航照影像,每一像元其 地面大小約為 0.1m。為減少計算時間,各類數據在比對前需先行排序與分割。 高程差 0 i i i Z Z Z = − ∆ (1) : 0 i Z 由數值高程模型 1 取得之高程值 : i Z 由合於搜尋半徑數值高程模型 2 取得之高程值(對應數值高程模型 1) 平均誤差 Z Z n n i i)/ ( 1
∑
= ∆ = ∆ (2)標準偏差 ( )/ 1 1 2 − ∆ =
∑
= n Z n i i (3) 首先將璞玉航測計畫地面控制點與新竹地區全部雷射掃描數據比較,考量 地面控制點的數量較少且分佈區域未必落在空載雷射掃描計畫之測試區內,因此 點位搜尋範圍由0.1m逐漸增加至1.0m,保留搜尋半徑較小之點位可得附表1。本 次航測計畫使用之地面控制點共分為三類,其中點名為1XXX代表石樁(突出地 面約20公分),2XXX代表鋼樁,3XXX則代表鋼片樁。 在附表1中,X2、Y2、及Z2為地面控制點座標,X1、Y1、及Z1則為搜尋對 應之雷射點座標,在此21個點中之平均高程差為-32.6公分,其中有4個地面控制 點高程差較大,且均為負值(代表雷射點高程值高於地控點高程值),分別為 1007、1008、2004、3003。檢視點之記檔案發現,1007、1008分別位於雜草與花 圃中,2004位於道路邊緣近水稻田之處,而空載雷射掃描於航照計畫完成一年後 進行,推測有可能是因地貌改變或所得之雷射點乃是由地控點四周較高植生反射 計算而得。至於點號3003,因其位於屋頂,且點位四周並無較高物體,造成較大 之高程差值,須進一步分析其原因。 表3.各種數據比較之各項統計資料 數據比較型態 Laser_A/ Puyu_GCP Laser_A/ Match Laser_A/ Puyu_DEM Laser_G/ Match Laser_G/ Puyu_DEM Laser_S/ Match Laser_S/ Puyu_DEM Puyu_DEM/ Match 平均誤差(m) -0.326 4.915 -1.720 5.472 -0.173 3.611 -6.358 7.755 標準偏差(m) 0.706 7.852 4.512 7.124 3.674 7.140 7.549 8.833 最小絕對誤差值(m) 0.010 0.001 0.005 0.032 0.002 0.006 0.011 0.020 最大絕對誤差值(m) 1.863 20.256 43.424 36.277 14.455 38.360 30.960 47.850 搜尋點數 21 17,252 22,178 1,817 2,408 3,508 3,861 1,651 表3中Laser_A/Puyu_GCP代表全部空載雷射掃描數據與璞玉計畫地面控制 點數據高程值之比較,餘類推。由表3可知,以自動匹配生成之DSM其高程值 明顯偏高,這個現象也可由圖5b明顯看出。 圖5. 試作區以自動匹配技術生成之DSM側視圖而各種數據與自動匹配生成之DSM比較(Laser_A/Match、Laser_G/Match、 Laser_S/Match、及Puyu_DEM/Match)其平均誤差及標準偏差均較上述數據與璞
玉 計 畫 DEM 之 比 較 ( 如 Laser_A/Puyu_dem、 Laser_G/Puyu_dem、 及 Laser_S/Puyu_dem)大得多,其原因是自動匹配方式生成數值覆蓋模型中含有因 匹配不當所產生之大誤差,如圖5所示,懸在空中的點有可能為人工建物或是植 被,但由其統計資料來看,有許多點已超過該地區之最大高程值(雷射掃描數據 及璞玉計畫DEM之高程最大值均小於150公尺),因此產生較大之誤差。 進一步分析全部雷射掃描數據與自動匹配生成之 DSM 之高程誤差量 (Laser_A/Match)分佈情形,發現在圖6a圈選之區域有較大之誤差量,對照6b 誤差量分佈統計圖、地形圖、及對應之正射影像,約略可歸納出這些區域大致落 在建物較密集地區,或是立體像對重疊區之邊緣部分,而這些區域也是以自動匹 配技術生成DSM較易發生錯誤的區域。 a. 二維誤差分佈圖 b. 誤差量分佈統計圖 圖6. 全部雷射掃描數據與自動匹配生成之DSM比較之誤差分佈圖
由計算結果同時發現,雷射掃描地形面數據與璞玉計畫DEM之高程誤差量 (Laser_G/Puyu),比其他數據間之較差小,此乃因為璞玉計畫DEM 移除了人 工建物與植被,應與地面空載雷射掃描數據相當接近。但由於目前的雷射掃描資 料分離技術未臻成熟,難免會發生雷射掃描點被錯誤分類的情形。如圖7所示, 紅色圓點代表經分離後之地面(ground)雷射掃描數據,綠色三角點代表經分離 後之覆蓋(surface)雷射掃描數據,圖7中的圓形區域,顯示有許多應歸類在覆 蓋類別之掃描點,被錯誤的歸類於地面點;同樣的,在矩形區域中,顯示有許多 應歸類在地面類別之掃描點,被錯誤的歸類於覆蓋點。因此,由於錯誤的分類數 據,導致了數據在比較時產生較大的誤差,是可以理解的。當然,將空載雷射掃 描覆蓋數據與地形面數據之璞玉計畫DEM相比較(Laser_S/Puyu_dem),是沒 有意義的,這項實驗,只是為了與Laser_G/Puyu之結果作對照。 圖7. 空載雷射掃描資料分類錯誤之情形 同樣地,進一步分析地面空載雷射掃描數據與璞玉計畫DEM之高程誤差量 (Laser_G/Puyu)分佈情形,發現圖8a與8b右上角產生較大誤差量之區域,與 頭前溪流經之區域(如圖3所示)約略相符,且越靠河流中心誤差量越大。推測 其原因有二:第一,河道地形變化較速;第二,璞玉計畫 DEM,乃是將 5m 間 距內插為2.5m之DEM,檢視原5m DEM在頭前溪流域之分佈點嚴重不足,因 此內插所得之高程值並不能完整描述此區域之地貌,這應是造成該區域較大誤差 量之主因。另外,檢視圖8b 中較大的下陷區域,也就是具有較大的負誤差量, 其原因乃是這個區域為建物區,加上雷射掃描地形面數據分類不完整,於是產生 較大之負值。
a. 二維誤差分佈圖 b. 三維誤差分佈圖 圖8. 地面(ground)雷射掃描數據與璞玉計畫DEM之高程誤差量分佈情形 五、結論 本研究目前僅完成初步之比對,未來將更細緻地就此兩種數據源進行比 對。以目前之成果發現,未經人工修正之自動匹配方式生成數值覆蓋模型中含有 因匹配不當所產生之大誤差;而空載雷射掃描儀數據亦有高程分類不當之處。此 外,就本研究衍生之相關研究方向,概述如下: 1. 點密度僅能代表空載雷射掃描資料概略的分佈情形,由於不同地物特 性,對紅外光之反應並不同,造成某些區域點密度較高,某些區域點密 度過低,甚至出現無反射訊號之區域。而利用地面施測控制點檢核雷射 掃描數據之精度,也僅是局部性的作法,對於觀測量如此龐大的測量方 式,如何有效並合理的評估其精度並訂出類似航測作業之規範,為重要 之課題。 2. 空載雷射掃描數據分離技術的良窳,決定了分類的精度,未來若能發展 可靠的分離技術,對三維城市模型建立,將有莫大的助益。
3. 由本研究中發現,以自動匹配技術所生成之 DSM,存在著許多匹配錯 誤的資料點,若未經人工編修,很難藉以產生高品值之正射影像;因此, 利用空載雷射掃描數據高精度、高解析度特性,應用於較高品值之正射 影像生產,其作業流程值得探究。 4. 空載雷射掃描數據系統誤差的顯著與否,端看其應用層面而定,假若僅 是用以產生 DEM,則可忽略其在平面方向的系統誤差;但若使用雷射 掃描數據計算樹冠高或是特定樹種的位置,以及建立三維城市模型時, 平面位置的精度便和高程精度一樣重要。本年度之研究僅探討了空載雷 射掃描數據於高程方向(垂直方向)之精度,未來將置重點於水平方向 精度之評估,以及系統誤差改正方法之研究。 六、參考文獻 徐逢亮,1999,利用機載激光測距和多光譜影像製圖系統實現城市建築物的自動 提取,碩士論文,中國科學院遙測所,北京。 內政部,2001,一等一級水準點上實施重力測量,八十九年度內政部委託研究計 畫期末報告。 農委會,2001,應用空載雷射掃描儀進行地震災區形變研究,行政院農業委員會 九十年度試驗研究計畫研究報告,90農科-4.1.2-林-R1(6)。 史天元、彭淼祥,2002,九二一地震災區空載雷射掃描作業成果初步報告,第二 十一屆測量學術及應用研討會論文集,pp449-456。 賴志恆,2003,雷射掃描點雲資料八分數結構之研究,,碩士論文,國立成功大 學測量工程學系,台南市。
Baltsavias, E.P., 1999a. A comparison between photogrammetry and laser scanning. ISPRS Journal of Photogrammetry & Remote Sensing, 54, 83-94.
Baltsavias, E.P., 1999b. Airborne laser scanning: existing systems and firms and other resources, ISPRS Journal of Photogrammetry & Remote Sensing, 54(2/3), 199-214.
Cunningham, A.G., W.J. Lillycrop, G.C. Guenther, and M.W. Brooks, 1998. Shallow water laser bathymetry: accomplishments and applications, Proc. Oceanology International, March 10-13, 1998, Brighton, England, Vol. 3, 277-288.
Golden Software, Inc. 1997. Surfer for Windows User’s Guide.
Hwang, C (1997) Analysis of some systematic errors affecting altimeter-derived sea surface gradient with application to geoid determination over Taiwan. J Geod 71, pp.113-130.
Irish, J. L., and W. J. Lillycrop, 1999. Scanning Laser Mapping of Coastal Zone: the SHOALS System, ISPRS Journal of Photogrammetry & Remote Sensing, 54(2/3), 123-129.
LH Systems, 2002. ALS40 AIRBORNE LASER SCANNER, (URL:http://gis.leica- geosystems.com/products/als40.html).
Maas, H.-G. 2002. Methods for measuring height and planimetry discrepancies in airborne laserscanner data, Photogrammetric Engineering & Remote Sensing, Vol. 68, No. 9, pp. 933 – 940. 附表1. 新竹地區全部空載雷射掃描數據與璞玉計畫地面控制點的高程值比 較(Laser_A/Puyu_GCP)成果表 X1 Y1 Z1 點名 X2 Y2 Z2 距離(m) 高程差 251530.63 2743482.33 71.4 3002 251530.519 2743482.374 71.291 0.12 -0.109 252121.89 2744652.02 58.85 1003 252122.516 2744652.33 58.692 0.70 -0.158 252225.69 2743105.26 63.38 2019 252225.639 2743105.122 63.321 0.15 -0.059 252928.1 2744102.16 64.21 2022 252927.723 2744102.239 64.279 0.39 0.069 252948.47 2742610.44 72.82 2018 252948.501 2742610.6 72.74 0.16 -0.08 253205.28 2743067.62 64.83 2017 253204.769 2743067.452 64.938 0.54 0.108 253705.23 2742182.04 77.88 2014 253704.986 2742181.859 77.865 0.30 -0.015 253803.62 2742799.34 69.92 2013 253803.996 2742799.593 69.873 0.45 -0.047 253823.98 2743549.39 71.79 1004 253824.338 2743549.189 71.883 0.41 0.093 254437.08 2744524.18 66.98 2016 254436.663 2744523.846 66.99 0.53 0.01 254517.28 2742171.9 77.22 2009 254517.61 2742171.872 77.099 0.33 -0.121 254555.59 2741287.06 134.94 1007 254556.063 2741287.276 133.077 0.52 -1.863 254730.56 2743418.75 77.43 2007 254730.753 2743418.304 77.65 0.49 0.22 255213.16 2741147.03 138.34 3003 255213.091 2741146.905 136.557 0.14 -1.783 255239.42 2744622.93 68.41 2015 255238.754 2744622.62 68.502 0.73 0.092 255297.51 2743262.62 78.29 2010 255297.324 2743262.316 78.311 0.36 0.021 255642 2743959.32 73.62 2012 255641.617 2743959.075 73.727 0.45 0.107 255898.36 2741057.68 110.12 1008 255897.979 2741057.747 108.624 0.39 -1.496 255994.23 2744516.11 72.88 2011 255994.022 2744515.598 72.856 0.55 -0.024 256194.2 2742200.39 90.23 2005 256194.296 2742200.539 90.185 0.18 -0.045 256833.53 2742420.07 92.96 2004 256834.081 2742420.027 91.183 0.55 -1.777