國 立 政 治 大 學 地 政 學 系
碩士論文
私 立 中 國 地 政 研 究 所
以四旋翼 UAS 酬載熱感測器製作數值表
面溫度模型供地溫研究
Generation of Digital Surface Temperature Model
from Images Collected by Thermal Sensor on
Quadcopter UAS for Geothermal Study
研究生:謝耀震
指導教授:邱式鴻
謝誌
一切都是個緣分,這兩年多來的辛酸與歡愉都將會是我一輩子的回憶, 邱式鴻老師無疑是研究所生涯中最大的支撐,同為水瓶座的我們似乎冥冥 中有種緣分,大學的導師到研究所的指導教授,亦師亦友。很感謝老師在 學生叛逆無心於研究的時候拉我一把,此生不敢忘。也很感謝林士淵老師、 甯方璽老師、詹進發老師以及林老生老師在學術上給我許多提點。謝謝雪 芬和麵包在我碩一困苦的時候給我溫暖,讓我有前進的動力,真的很愛你 們。東旂,相見恨晚的朋友,真的很感謝你總是捧我讓我回復一點信心, 雖說有時候總愛開我玩笑,但不得不說我很喜歡跟你搏感情,因我你我都 是直接的人,陽明山之情一輩子不會忘的!!榮恩,從以為你是壞孩子的一開 始到搬來 RS,也經歷了許多事,不得不說有你在身旁,心情都會變得比較 安心,之後出社會再彼此關照,願當一輩子的好酒友!。姿瑜,理性又負責 任而且心細到不行的孩子,真的很開心妳放心讓我帶你上玉山,能得到你 的相信算是我莫大的榮幸,之後在職場還是請多關照。RS 的各位,總是引 經據典的育賢、說話不轉彎的宏嘉、測班 center 的子凱、冷面笑匠的立丞、 人最好的大姊、說話精闢的義傑,謝謝你們帶給我許多歡笑並且包容我的 刀總是沒有鞘。承憲,謝謝你這段時間的寄宿,因為研究所讓我們彼此有 了進一步的了解,擁有你的友誼就像中了樂透一樣的富有。匯捷,我大概 一輩子都還不了你人情債了,衣食父母當之無愧,沒有你大概沒有今天的 我,也謝謝趴哥和有為這樣挺我,心存感恩。謝謝校隊的大家,你們都是 很好很棒的孩子,能有緣認識你們是我的福氣。謝謝 ruby 總是敞開大門讓 我去吃家常菜,謝謝柏翰和子謙總是讓我任性妄為,謝謝我的好趴逆健雅 跟我打了不少好球,謝謝俊能、長腿和傳捷讓我有球打又吃飽飽。謝謝比 比在我最後的時間陪伴我許多,或許是因為要遇見你我才會上碩班呢,以 後也請多多指教。最後要感謝所有的朋友,沒有你們,沒有今天的謝耀震。摘要
熱像儀,能感測可見光感測器無法取得的訊息,因此若能透過熱像儀 器進行環境偵測,便能得到一般可見光感測器無法獲取的資料。本研究擬 以四旋翼 UAS 酬載熱像儀得到局部區域高解析度之地面熱資訊以便作為地 溫研究之背景資料使用。而一般地溫研究區,不易佈設控制點,因此本研 究除於無人機上酬載熱像儀之外,並將搭載 Trimble BD970 GNSS OEM 接 收模組,嘗試以少量地面控制點、以及 GNSS 動態後處理的方式取得取像 時對應的 GNSS 觀測量輔助熱像定位定向。本研究中針對國立政治大學旁 的指南溪 實驗區與陽明山國家公園的小油坑實驗區, 使 用 AI-RIDER YJ-1000-HC 四旋翼 UAS 分別酬載熱像儀 FLIR Tau 640 和巨哥 XM6,並且 同時搭載 Trimble BD970 GNSS OEM 接收模組、以及 GNSS 動態後處理的 方式取得取像時對應的 GNSS 觀測量搭配少量地面控制點輔助熱像定位定 向,過程中透過三焦張量剔除自動匹配之誤匹配連結點。實驗結果顯示, 兩實驗區所產製之 DSM 於不易變動區域精度經現有資料檢核均在±1m,而 指南溪實驗區產製出地面解析度 11 公分的數值表面模型(Digital Surface Model, DSM)與正射熱像,且正射熱像平面精度達為 47 公分;小油坑實驗 區產製出地面解析度 14 公分之 DSM 與正射熱像,正射熱像平面精度則為 67 公分,雖然 DSM 和正射熱像精度無法符合一般常規的測量規範,但成 果仍然可以證明熱像直接產製 DSM 以及正射熱像之可行性,兩實驗區最後 皆生成數值溫度表面模型(Digital Surface Temparature Model, DSTM),顯示Abstract
Thermal infrared images show the temperature change of sensed scenes. Therefore, thermal infrared camera can sense some important information that optical digital cameras cannot do for the environment monitoring. In this study, the Quadcopter UAS for thermal image collection applied to geothermal study will be developed. FIIR Tau 640 and Magnity Eletric XM6 thermal infrared sensor will be used in this thermal image collection system separately two test areas, Zhinan River nearby NCCU and Xiaoyoukeng, in the Yangmingshan National Park. Additionally, Trimble BD970 GNSS OEM board will be carried on the Quadcopter UAS to collect dual-frequency GNSS observations for determining the flying trajectory by Post-processed kinematic (PPK) technique to support the positioning and orientating of collected thermal images, and the trifocal tensor will be used to delete wrong matching tie images points. From the tests, the differences between produced DSM and existing DSM data are ± 1 m on uneasy change ground surface in two test areas. The resolution of produced DSM and thermal orthoimages are about 11 cm in Zhinan River, and 14cm in Xiaoyoukeng area. The accuracy of thermal orthoimages is 47cm in Zhinan River and 67cm in Xiaoyoukeng area. The accuracy of thermal orthoimages may not comply with a normal surveying standard, but it proves the possibility of DSM and orthorectifed thermal images generated from thermal images directly. Digital Surface Temparature Model (DSTM) produced in both tests can be used for volcanic geothermal monitoring in the future.
Keywords: Unmanned Aircraft System、Thermal Images、Positioning and
Orientation 、 Bundle Adjustment Aerial Triangulation 、 Thermal Camera Calibration、Trifocal tensor
目錄
授權頁 ... I 謝誌 ... II 摘要 ... III Abstract ... IV 目錄 ... V 圖目錄 ... VIII 表目錄 ... XI 第一章 緒論 ... 1 第一節 研究背景 ... 1 第二節 研究動機與目的 ... 3 第三節 遭遇的問題與解決方法 ... 5 第四節 研究流程與架構 ... 7 第二章 文獻回顧 ... 11 第一節 熱像儀率定 ... 11 第二節 UAS 航拍熱像定位定向與應用之研究 ... 16 第三節 誤匹配點剔除 ... 19 第四節 獲取地表溫度 ... 21 第三章 理論基礎與研究方法 ... 23 第一節 相機率定模式 ... 23第三節 誤匹配點剔除 ... 33 第四節 產製數值溫度表面模型 ... 38 第四章 研究材料與實驗 ... 39 第一節 儀器及軟體 ... 39 一、 GNSS 接收模組:BD970 ... 39 二、 熱像儀:FLIR-TAU 640 ... 41 三、 熱像儀 :巨哥電子 XM6 ... 42 四、 熱像儀率定軟體:iWitnessPRO ... 43
五、 四旋翼 UAS :AI-RIDER YJ-1000-HC ... 44
六、 影像匹配軟體:Pix4Dmapper ... 45
七、 航測軟體:IMAGINE Photogrammetry 2015 & ORIMA 45 第二節 熱像儀率定實驗 ... 47 一、 指南溪實驗區熱像前處理 ... 47 二、 率定實驗 ... 48 第三節 指南溪試驗區實驗 ... 54 一、 航拍規劃 ... 54 二、 拍攝結果 ... 55 三、 圖 4- 15 指南溪實驗區使用之熱影地面涵蓋圖 UAV GNSS PPK 軌跡求解 ... 56 七、 熱像連結點匹配探討 ... 60 八、 Pix4Dmapper 光束法空三平差 ... 63 九、 誤匹配點剔除 ... 64 十、 ORIMA 光束法空三平差 ... 65 十一、 產製數值溫度表面模型 ... 68 第四節 小油坑試驗區實驗 ... 73
二、 拍攝結果 ... 74 三、 UAV GNSS PPK 軌跡求解 ... 75 四、 Pix4Dmapper 光束法空三平差 ... 78 五、 誤匹配點剔除 ... 79 六、 ORIMA 光束法空三平差 ... 79 七、 產製數值溫度表面模型 ... 83 第五章 結論與建議 ... 91 第一節 結論 ... 91 一、 指南溪實驗區 ... 91 二、 小油坑實驗區 ... 93 三、 遭遇問題探討 ... 94 四、 總結 ... 96 第二節 建議 ... 97 一、 三焦張量的策略 ... 97 二、 影像擷取之時間最小單位 ... 97 三、 地表溫度之校正 ... 97 參考文獻 ... 98
圖目錄
圖 1- 1 研究方法流程圖 ... 9 圖 2- 1 熱影像之率定板(左)及拍攝之影像(右) (Luhmann et al., 2010; Hartmann et al., 2012) ... 12 圖 2- 2 以日光均勻照射後之 PhotoModeler 之率定模板(那至中,2010) . 13 圖 2- 3 三維之率定標(Laguela et al., 2011) ... 13 圖 2- 4 鋁質率定標之可見光影像(左)及鋁質點位率定標之熱影像(右)(Liao and Huang, 2013) ... 14 圖 2- 5 填以冰棉花之率定標許翎㳖(2014) ... 14 圖 2- 6 地表溫度模型成果(Hartmann et al., 2012) ... 17 圖 2- 7 正射熱影像以及可見光影像套疊展示(Nishar et al., 2016) ... 18 圖 3- 1 率定標 ... 25 圖 3- 2 熱像儀率定場 ... 26圖 3- 3 線段 L 於三張影像上之相對關係(Hartley and Zisserman, 2004) ... 33
圖 4- 1 Trimble BD970 接收模組及天線 ... 40
圖 4- 2FLIR Tau 640 熱像儀 ... 41
圖 4- 3 H.264 MINI DVR 錄影卡 ... 42
圖 4- 4 巨哥 XM6 熱像儀 ... 43
圖 4- 5 AI-RIDER YJ-1000-HC 多旋翼 UAS(剛鈺,2015) ... 44
圖 4- 6 熱像處理前後比較 ... 47 圖 4- 7 野外率定場所使用的 9 張率定場影像 ... 48 圖 4- 8 野外率定場率定時取像位置與檢定場關係 3D 示意圖 ... 49 圖 4- 9 實地觀測距離示意圖,紫色線段作為設定率定模型之比例尺 ... 49 圖 4- 10 巨哥 XM6 率定場所使用的 12 張率定場影像 ... 51 圖 4- 11 近景率定場率定時取像位置與檢定場關係 3D 示意圖 ... 52
圖 4- 12 實地觀測距離示意圖,紅色線段作為設定模型比例尺之用 ... 52 圖 4- 13 巨哥 XM6 率定影像成果擷取 ... 53 圖 4- 14 控制點(深藍)與檢核點(淡藍)佈設分佈圖 ... 55 圖 4- 15 指南溪實驗區使用之熱影地面涵蓋圖 UAV GNSS PPK 軌跡求解56 圖 4- 16 指南溪動態後處理部分成果 ... 56 圖 4- 17 UAV 航拍時某取像位置之軌跡移動趨勢上視圖 ... 57 圖 4- 18 各透視中心十筆 GNSS 觀測量之標準差 ... 58 圖 4- 19 UAV(藍色)所搭載之衛星接收天線(紅色)與 IMU(綠色)之相對關係 ... 59 圖 4- 20 歸算前後各方向距離較差值與距離 ... 60 圖 4- 21 ORIMA 自動匹配後前交所生成的連結物點 ... 61 圖 4- 22 Pix4Dmapper 產製之連接地物點示意圖 ... 62 圖 4- 23 連接點拉近示意圖,紅圈處為錯誤點。 ... 62 圖 4- 24 以 Pix4Dmapper 連接點匯入 Orima 錯誤點示意圖 ... 63 圖 4- 25 Pix4Dmapper 自動光束法平差解算成果 ... 64 圖 4- 26 經除錯後之連接點匯入 IMAGINE Photogrammetry 示意圖 ... 65 圖 4- 27 純地控檢核點分布及高程差值 ... 67 圖 4- 28 指南溪熱像所產製之 DSM ... 68 圖 4- 29 指南溪熱像所產製之正射鑲嵌熱影像 ... 68 圖 4- 30 可見光與熱影像 DSM 相減較差顯示 ... 69 圖 4- 31 指南溪不易變動區顯示圖(框線處) ... 70
圖 4- 36 控制點(深藍)與檢核點(淡藍)佈設分佈圖 ... 74 圖 4- 37 小油坑實驗區使用之 145 張熱像地面涵蓋圖 ... 75 圖 4- 38 小油坑動態後處理部分成果 ... 75 圖 4- 39 影像編號與其對應之 GNSS 觀測量坐標 ... 76 圖 4- 40 各透視中心十筆 GNSS 觀測量之標準差 ... 77 圖 4- 41 小油坑 UAV 航拍之各項數據紀錄 ... 77 圖 4- 42 小油坑實驗區 GNSS 觀測量歸算前後各方向較差與空間距離 ... 78 圖 4- 43 小油坑空三平差檢核點精度 ... 78 圖 4- 44 十筆觀測量之標準差三方向均低於 20 公分之 GNSS 觀測量分佈 80 圖 4- 45 完成平差解算後網形 ... 83 圖 4- 46 小油坑實驗區熱像所產製之 DSM ... 84 圖 4- 47 小油坑實驗區熱像所產製之正射鑲嵌影像 ... 84 圖 4- 48 光達 DSM 與熱影像 DSM 相減較差顯示 ... 85 圖 4- 50 小油坑不易變動區標示圖(框線處) ... 86 圖 4- 49 小油坑正射影像檢核點分佈 ... 87 圖 4- 50 正射影像檢核點(紅色)與地控點(黃色)分佈 ... 88 圖 4- 53 將溫度資訊匯入之溫度熱影像(上),紅圈內像元的局部溫度值(下) ... 89 圖 4- 52 小油坑的 DTSM 於 ArcGIS 展示(紅色:三維坐標,綠色:溫度) ... 89
表目錄
表 4- 1 Trimble BD970 規格 ... 40
表 4- 2 熱像儀 FLIR Tau 640 ... 41
表 4- 3 熱像儀巨哥 XM6 規格表 ... 43
表 4- 4 AI-RIDER YJ-1000-HC 多旋翼 UAS 特性 ... 44
表 4- 5 熱像儀野外率定參數 ... 48 表 4- 6 熱像儀野外率定檢核成果 ... 50 表 4- 7 巨哥 XM6 經近景率定後相機參數成果 ... 51 表 4- 8 巨哥 XM6 近景率定檢核成果 ... 53 表 4- 9 UAS 兩秒內之點位與均值之差值 ... 57 表 4- 10 指南溪之影像 GNSS 觀測量十筆標準差節錄 ... 58 表 4- 11 指南溪實驗區四種空三平差成果比較 ... 66 表 4- 12 GNSS 觀測量歸算前後不同精度設定之空三平差成果之比較 ... 67 表 4- 13 可見光與熱影像產製之 DSM 相減較差量化表 ... 70 表 4- 14 指南溪正射熱影精度檢核 ... 71 表 4- 15 小油坑實驗區四種空三平差成果比較 ... 80
表 4- 16 小油坑實驗區執行 In-Flight camera calibration 自率光束法四種空三 平差結果比較 ... 81
表 4- 17 小油坑實驗區四種空三平差成果比較(三檢核點) ... 82 表 4- 18 執行 In-Flight camera calibration 自率光束法之四種空三平差結果觀
第一章 緒論
第一節 研究背景
在自然環境中,根據普朗克黑體輻射定律,凡是溫度超過絕對零度以上 的物體便會發出電磁輻射,而溫度的差異性則會顯現不同的電磁輻射強度, 藉由熱感測器(文後皆稱熱像儀)可將其轉換為熱光譜資訊,也就是熱像儀感 應成熱像。舉凡熱像的利用十分廣泛,河川廢水監測、森林疾病災害、火 山監測等等的環境監測都會使用。過去熱像應用大多來自衛載熱像,莊弘 豪、曾若玄(1998)利用 Landsat 衛星影像分析電廠溫排水口附近海面溫度分 佈情形,並應用兩種不同的方法修正因大氣吸收所產生的觀測誤差,再與 實測水溫結果比較。郭南榮、許明光(2012) 以衛星影像分析海表溫度紅外 波段影像,及衛星高度計資料觀測黑潮從菲律賓東側源區往北經呂宋海峽 到台灣東北部之運動情形。而於空載熱像使用方面,Faux et al. (2001)利用 直升機搭載熱像儀對河水及溪流之溫度進行監測,有別於傳統的在流域點 監測,得到的是面狀溫度資料,更能針對溫度異常部分予以調整至符合生 物棲息之溫度,執行復育之工作。而國內達雲科技股份有限公司(2014)引進 租用有人機空載大型熱紅外線儀器,發展以其感應之熱像進行地熱探勘研 究之計劃。 衛載熱像可以獲取十分大範圍的地面資訊,但在解析度方面,如 LANDSAT-7 ETM+ 和 LANDSAT 8 OLI 的紅外波段空間解析度為 30-60 m; 而 SPOT 1-7 都備有紅外波段且空間解析度可以達到 8.8m,在未來準備發 射升空的福爾摩沙衛星五號的紅外線波段空間解析度更是能達到 4m。但與 空載熱像相比,其空間解析度仍顯得較差,且由於穿透多層介質及阻礙的 影響,雖然可以透過數學模式改正,但仍存有一定的誤差。而雖然使用空載熱像儀所得之熱像其地面解析度較高(如 Star SAFIRE 380-HD(Flir,2012)), 但往往設備本身價格不斐且所需作業成本高昂,機動性也較差。
近年來,隨著科技的進步,無人飛行器 UAV(Unmanned Aircraft Vechicle) 所組成之無人航空系統 UAS(Unmanned Aircraft System)具備高機動性、安 全、及時回覆等特性,可以低成本酬載不同感測器即時獲取資料。目前 UAS 系統中的 UAV 主要分為定翼機與旋翼機,其中定翼機的飛行穩定性較佳, 但必須維持一定的飛行速度以產生足夠的升力,且起降時需要一定的跑道 長度或回收機制,在任務的執行上將受到環境與空間的限制。而旋翼機的 機動性則較高,除了不需跑道可垂直起降,也可隨時改變飛行速度、修正 飛行高度,改變飛行方向時較迅速,且具備停懸(hovering)能力,較適合救 援工作、空中巡邏(趙弘文,2009)。因此,若能將熱像儀酬載於 UAV 上執 行相關研究,如 Ambrosia et al. (2005)執行美國太空總署(NASA)計劃時,即 以 UAS 酬載熱像儀進行森林大火的災害防治。而本研究即是嘗試以四旋翼 UAS 酬載熱像儀製作數值表面溫度模型供地溫研究。
第二節 研究動機與目的
地溫監測是探討火山活動的主要研究工作之一(Tilling, 1989),如果火 山地區地底下有岩漿庫、殘餘的岩漿或有後火成活動,則通常在地表附近 可發現較高的地溫,地底下的地溫梯度也會偏大,並呈現較高的熱流值 (Zeni et al., 2007),而國內常見的監測方式便是使用由台灣大學海洋研究所 自行研發的微小型熱探針,但即使佈設二到三個探針,也只能獲取之三點 的地層溫度變化,還是無法以這些點資料所收集的數據來推論整個火山活 動的趨勢;且每個探針成本高昂,又容易受到硫磺氣體的腐蝕。UAS 的高 機動性、安全、低成本且即時回覆的特性,搭配熱像儀對地表進行溫度變 化的探測能力,則可以在航拍高度較低的情況下得到較好的空間解析度且 能快速地蒐集熱像資訊,提供更完整的空間資訊進行分析與應用。關於 UAS 酬載熱像儀之實驗,國內外已有相關研究,Brumana et al. (2013)利用三種 不同的模式來進行光學影像與熱像的地理對位,其中以大量地面控制並以 光束法空中三角測量平差(簡稱空三平差)執行可見光影像和熱像的方位求 解後產製出正射糾正影像之套疊成果是最好,但所費成本及時間相當多。 廖家翎(2013)以單旋翼機酬載熱像儀並執行熱像空三平差,並和空載光達產 製成之數值表面模型(Digital Surface Model, DSM)建製出數值表面溫度模 型(Digital Surface Temparature Model, DSTM),但其表面溫度乃是將溫度標 準化後的相對溫度,而非真實地表溫度且大量佈設控制點十分耗費成本。 Amici et al. (2013)則以多旋翼 UAV 搭載熱像儀對義大利西南方的泥火山進 行單張拍攝,以此來進行對泥火山表面溫度之研究。Nishar et al. (2016) 應 用小於 2 公斤的無人機 UAV 於紐西蘭陶波(Taupo) Wairakei-Tauhara 地熱 場,以熱像儀安全且精確地製作獨特棲息地的自然和生物特徵,而攝影測 量則用來獲取地溫表面特徵和其附近的植被的詳細資訊。載台是由電池供ArcGIS 10.2 進行約 700 m2 區域影像鑲嵌和處理。0.5 公分像元大小的正 射熱像用來顯示溫度異常處。Nishar et al. (2016)文中提到儘管電池壽命、 導航能力、和飛航限制無人機應用,然而使用無人機的遙測可革命性地探 索地熱熱能源和其所創造的獨特生態系統。Harvey et al. (2016) 則證實使用 無人機產製大區域、無法靠近地熱區域之精確熱像圖,文中提及於兩星期 獲取近 6000 張熱像製作紐西蘭 Waikite 地熱區 2.2 km2 經地理對位、溫度 率定之正射熱像,是第一個呈現用無人機酬載熱像儀產製地熱區正射熱像 進行研究的重要實驗。 地溫研究區域,在地面控制點的佈設上十分不易,再加上熱像的成像特 性的關係,控制標所需之材質與一般可見光相機使用的不同,也增加航拍 之後執行熱像空三平差作業成本和困難度。在過去的研究中已開始將 GPS(Global Positioning System)觀測量或稱 GNSS(Global Navigation Satellite System)觀測量加入空三平差計算,以解決可見光影像定位定向的問題,研 究成果顯示可降低地面控制點需求(Friess, 1990;Ackermann, 1997;Bilker et al., 2000;Rugziene et al., 2000;Skarlatos et al., 2013)。而許翎㳖(2014)嘗試 以 VBS-RTK GPS 輔助單旋翼機熱像定位定向,確定 GNSS 輔助熱像空三 平差的可行性,唯其在 GPS 接收模組收訊方面不佳,導致其定位成果未達 理想。綜合上述,本研究具體研究目的如下: 一、發展旋翼 UAS 熱像儀航拍取像並以 GNSS 觀測量輔助光束法空三平差 進行熱像之定位定向。 二、以熱像產製數值表面模型(DSM),並產製正射糾正鑲嵌熱影像。
第三節 遭遇的問題與解決方法
根據上述研究目的與動機,本研究擬以 UAS 酬載熱像儀航拍取像,並 以 GNSS 輔助光束法空三平差執行影像定位定向,之後製作數值表面溫度 模型 DSTM。這將須解決下列問題: (1) 因本研究所使用之熱像儀為非量測型相機,又為符合真實拍攝情形, 本研究擬用野外率定場法事先進行相機率定,或嘗試以 in-flight camera calibration 自率方法,解決熱像相機參數率定之問題。 (2) 由於本研究使用的熱像儀其中一部是以錄像的方式取像,因此需依照 航線規劃設計擷取所需影像,並重新取樣至與其面陣列電荷耦合元件 (Charge Coupled Device, CCD)尺寸相符之影像大小。此外,為增加匹 配之正確率,側邊的溫標和左下方的時間標記也需進行處理,本研究 將使用 Photoshop 軟體製作巨集自動化處理上述問題。 (3) 錄像所記錄的時間和 UAV 上的時間記錄存有一系統差,本研究將觀察 其運動軌跡之趨勢,藉此消除系統差。 (4) 取像時間和 GNSS 觀測量所記錄的時間應一致,但 UAV 上所記錄的取 像時間最小單位為整數秒,而 GNSS 觀測量為 1 秒 10 筆,因此記錄的 時間最小單位到整數秒下一位。因此,本研究將以整秒為區間,取十 筆 GNSS 觀測量求均值作為對應影像之 GNSS 觀測量。 (5) 取像時熱像儀透視中心位置與衛星接收天線位置存有一偏移值,取得 熱影之 GNSS 觀測量非對應熱像隻透視中心,本研究將使用 UAV 上所 搭載之慣性導航單元(Inertial Measurement Unit, IMU)所記錄的姿態參 數改正此偏移量。ORIMA 軟體執行空三平差,也包括 DSM 和正射糾正鑲嵌熱像之製作。 但由於熱像本身成像品質不高,可能會導致匹配像點有誤,必須對其 進行誤匹配點剔除,以利後續處理。本研究擬以像對中之對應像點線 性求解得到三焦張量(Hartley and Zisserman, 2004) 並透過隨機樣本一 致性(Random Sample Consensus , RANSAC) (Fischler & Bolles, 1981)之 模式求解最佳之三焦張量,用來剔除誤匹配點。
(7) 由熱像所產製的正射影像上之灰階值並非實際感應之溫度值資訊,本 研究將利用反解法求其對應之熱像所記錄之溫度值資訊。
第四節 研究流程與架構
如上節所述,本研究所使用之熱像儀為非量測型相機,又為符合真實拍 攝情形,本研究擬用野外率定場法事先進行相機率定,或嘗試以 in-flight camera calibration 方法,解決熱像相機參數率定之問題。之後航拍蒐集熱像, 必要時進行熱像前處理;接著以 GNSS 動態後處理(Post-Processed Kinematic, PPK)的方式解算航拍軌跡,並以時間對應取得 GNSS 觀測量。然後將資料 匯入 Pix4Dmapper 進行影像匹配生成連接點(tie point),再以產製出之匹配 連接點中可形成三像之對應像點求解三焦張量之關係,以 RANSAC 的方式 挑選出最適化三焦張量,進行誤匹配點之除錯;再將誤匹配連結點剔除後 之成果以及控制點和相機參數資料匯入軟體 ORIMA 重新進行 GNSS 輔助 光束法空三平差、生成 DSM、製作正射糾正鑲嵌熱影像,最終與與溫度資 料生成數值表面溫度模型 DSTM。綜合上述,本研究之流程主要分成下列 三階段:(1)資料前處理,包括熱像儀率定、航拍取像、熱像前處理。(2)誤 匹配點剔除及空三平差,此步驟將使用商用軟體 Pix4Dmapper 匹配連接點, 透過三張影像共同像對之對應像點求解三焦張量並以 RANSAC 的模式,選 出最適化三焦張量,再將誤匹配點剔除,接著匯入軟體 ORIMA 執行 GNSS 輔助光束法空三平差。(3)產品生成,包含以熱影像產製 DSM 和正射影像, 再將溫度資料和前述 DSM 和正射鑲嵌產品套疊生成數值溫度表面模型,所 有研究流程如下圖 1- 1。 本論文以先後順序分成緒論、文獻回顧、理論基礎與研究方法以及研究 材料與實驗,最後是結論與建議,每章所包含內容如下: (1) 緒論:將介紹研究之背景、動機與目的,並簡述解決之問題以及整 篇論文概要。(2) 文獻回顧:將對熱像儀率定、UAS 酬載熱像儀之應用及熱像定位 定向之研究、如何剔除誤匹配點以及如何獲取地表溫度等相關文獻 逐一回顧。 (3) 理論基礎與研究方法:將介紹研究所需之理論和方法,包含相機率 定、GNSS 輔助光束法空三平差、誤匹配點剔除以及建製數值表面 溫度模型 DSTM 的理論或方法。 (4) 研究材料與實驗:描述實驗所使用之軟硬體、以及實驗成果與分 析。 (5) 結論與建議:將整篇研究做一總結並給予建議。
資料前處理 誤匹配 點剔除 及空三 產製成果 熱像儀率定
產製連結點
求解三焦張量並 用其剔除誤匹配 點 產製密點雲 正射 糾正 影像 數值 表面 模型 產製數值表面溫度模 型 獲取 溫度 資料相片
軌跡
重新平差
航拍取像 圖 1- 1 研究方法流程圖第二章 文獻回顧
本研究將以四旋翼 UAS 酬載熱像儀,獲取熱像資料並執行定位定向後 製作 DSM 和正射熱像,最後製作數值表面溫度模型。如第一章所述,因 本實驗所使用之熱像儀為非量測型相機,須解決熱像相機參數率定之問題。 故第一節將回顧熱像儀率定之相關研究,接續第二節將回顧過去 UAS 航拍 熱像定位定向及其應用之相關研究,第三節將探討誤匹配像點剔除的相關 研究,最後一節則回顧如何顯示感測之地面溫度的方法。第一節 熱像儀率定
本研究使用的熱像儀為非制冷氧化钒焦平面陣列與非量測型光學相機 之取像原理相似,皆是透視中心成像於於面陣列電荷耦合元件 (Charge Coupled Device, CCD)上,兩者差別只在於光譜資訊的不同,前者為熱紅外 波段,後者為可見光波段。因此在前人的研究中,熱像儀之率定方式和非 量測型光學相機率定之方法類似,都需對像主距、透鏡畸變差等相機參數 做出改正(Kermer, 2009、那至中,2010、Luhmann et al., 2010、Hartmann et al., 2012)。 由於熱像儀感應的熱像記錄的是熱輻射資訊,與可見光影像相比,往往 熱像特徵局部對比都較低,因此率定標也需特別設計。Hartmann et al. (2012) 仿效 Luhmann et al. (2011) 根據不同物體有著不同的放射率,選用能將熱輻 射 90%反射的鋁作為率定標的材質。在受陽光照射後,鋁片和黏著編碼過 的覘標有了明顯的對比(圖 2-1)。目前普遍以近景攝影測量率定場法率定非 量測型光學相機,若以近景率定場法率定熱像儀,如何在熱影像上清楚呈 現率定標為率定時首要面臨之問題。熱像儀是紀錄物體熱輻射資訊,其率此須設計具有溫度差異之率定標,以供熱像儀拍攝率定之。目前近景率定 場法普遍是以平面率定場方式率定熱像儀(那至中,2010;Miraliakbari et al., 2010;Luhmann et al., 2010;Laguela et al., 2011;Hartmann et al., 2012) 。 Luhmann et al. (2010)所設計之熱率定標是根據不同金屬具有不同之放射率 而設計,其中鋁金屬之放射率最低。將鋁製率定板經由陽光照射後,可於 影像上呈現黑色(見圖 2- 1);Hartmann et al. (2012)亦是沿用前者率定標及方 式執行熱像儀相機率定;那至中(2010)則是使用 PhotoModeler 所設計之率 定模板,依據不同顏色有不同輻射率之特性,將率定標使用熱源均勻照射 (見圖 2- 2)並取像後,執行率定求得相機參數;然而,Laguela et al. (2011) 指出,若只以平面率定所得之相機參數,在景深方向的精度較差,因而衍 生三維率定場(見圖 2- 3),執行熱像儀率定,其所求之相機參數,能較平面 率定的方式精確求得不同景深的物坐標,而其率定之焦距與廠商規格相 近。 圖 2- 1 熱影像之率定板(左)及拍攝之影像(右) (Luhmann et al., 2010;
圖 2- 2 以日光均勻照射後之 PhotoModeler 之率定模板(那至中,2010)
Liao and Huang(2013)亦以三維率定場的方式佈設鋁製率定標,其使用 iWitnessPRO 軟體所設計之率定標為底圖,再將其黑點部分用鋁製材質覆蓋 (見圖 2- 4),均勻受熱後並拍攝最後求得相機參數;而許翎㳖(2014)則是將 iWitnessPRO 軟體所設計之率定標貼在保麗板上,將其黑點部分挖空以冰棉 花填補之(見圖 2- 5),根據冰塊溫度較周圍低的特性造成明顯對比而拍攝取 像率定之。 圖 2- 3 三維之率定標(Laguela et al., 2011)
圖 2- 4 鋁質率定標之可見光影像(左)及鋁質點位率定標之熱影像(右)(Liao and Huang, 2013)
圖 2- 5 填以冰棉花之率定標許翎㳖(2014)
由文獻可知,若以近景攝影測量方式率定相機並用於航拍取像,即使 對焦於無窮遠處,近景拍攝成像模糊導致率定成果受近景取像品質的影響, 使得率定成果與率定環境高相關(顏怡和等人,2011;Lin and Chio, 2012)。 因此,非量測型變焦光學相機於航拍取像與近景取像距離條件不同,因此 使用近景取像率定之相機參數於 UAS 可見光影像光束法空三平差的解算上, 將造成系統誤差。 同樣地,熱像儀以近景取像率定所得之相機參數用於
仁、袁修孝,2002),上述方法雖用於可見光影像,但其理論亦可用於航拍 熱像之處理上。 小結: 本研究擬設計符合熱像特性之熱率定標,以及野外率定場,使其率定之 焦距時,物距與航拍取像物距可是為無窮遠,克服率定不完全所產生系統 誤差之問題,以取得較精確之熱像儀相機參數。
第二節 UAS 航拍熱像定位定向與應用之研究
回顧前人文章,以前 UAS 航拍熱像大多只以單張用來輔助地面資訊的 辨識, Ollero et al. (2006)使用 UAS 航拍熱像執行森林大火的前、中、後的 應用評估,大火前 UAS 航拍熱像可以進行監視並且監測植被、執行氫氣壓 力和風險指數的估計;在火災期間可以偵測、確認與精確定位火源,災後 可以了解火災範圍。 到了近年才開始有 UAS 航拍熱像定位定向的研究,Miraliakbari et al.(2010)以低成本的感測器系統、高重疊率(前後 75%、側向 50%)進行 GPS/IMU 輔助多旋翼 UAS 可見光和熱影像的航拍取像,最後得到 10 公分 地面解析度的可見光正射影像。其 GPS/IMU 之觀測量透過卡爾曼濾波解算 出影像的外方位參數。而於熱像部分,也產製出正射熱像,但其畫質並未 能像可見光影像來的銳利,因此該研究將熱像和可見光影像進行影像融合 在光達製成之 DSM 上供判釋。Hartmann et al. (2012)則以八旋翼 UAS 酬載 焦距 13mm 之 FLIR Tau 640 熱像儀以航高 38m 取得熱像,該研究中之熱 像儀皆經相機率定,其影像前後與左右重疊皆為 90%,將獲取的熱像經過 空三平差處理程序後,可產生地面解析度為 5 公分之正射影像,產製地表 溫度模型,但其飛行高僅為 38 m,飛航高度較低,且其試驗區相當小(見圖 2- 6),也並未以 GPS 輔助 UAS 熱像進行定位定向。Brumana et al. (2013) 以多旋翼 UAS 酬載非量測型相機 Sony NEX-5N 和熱像儀 FLIR TAU 640 進行較大範圍航拍熱像地理對位的研究,地面控制方面其使用 Leica TS30見光與熱影像之正射糾正影像並將之套疊,其成果可用熱像呈現可見光影 像無法表現的地表資訊。 圖 2- 6 地表溫度模型成果(Hartmann et al., 2012) 廖家翎(2013)以單旋翼 UAS 酬載 FLIR-T360 進行熱像取像,以人工布 設地面控制點並採用光束法空三平差,再以空載光達點雲建立之數值地形 模型產製正射糾正熱影像進而產生數值地表溫度模型。而許翎㳖 (2014)以 VBS-RTK GPS 輔助單旋翼 UAS 熱影像定位定向,其使用 GPS 輔助以減少 對控制點的需求,但由於 GPS 訊號接收狀況、無線電與網路之傳輸及電磁 波干擾等因素導致定位精度不佳,直接影響空三平差精度,雖然未能做為 高精度空中控制,但這樣的定位精度已足夠應用於環境監測領域。Nishar et al. (2016)以紐西蘭 Taupo 附近的 Wairakei–Tauhara 為實驗區,以四旋翼 UAV 搭載 FLIR Tau 320 和 Sony HDR-AS100V 相機進行大面積(700𝑚2)取像,其
中熱像儀是採錄像方式進行拍攝;並佈設五個控制點執行影像定位定向; 最後使用 Pix4Dmapper 產製正射影像並以 ArcGIS 10.2 為介面展示,見圖 2- 7。
圖 2- 7 正射熱影像以及可見光影像套疊展示(Nishar et al., 2016) 小結: 由上述回顧可知,熱影像應用於環境監測之可行性,且使用 GNSS 輔 以 UAS 熱像之定位定向足以應付環境監測領域的應用,本研究擬以四旋翼 UAS 酬載熱像儀製作數值表面溫度模型供地溫研究,一般地溫研究區,如 火山地區,不易佈設控制點,因此本研究嘗試以少量地面控制點、以及 GNSS 觀測量輔助熱像定位定向。許翎㳖 (2014)以 VBS-RTK GPS 輔助單旋翼 UAS 熱影像定位定向,但由於 GPS 訊號接收狀況、無線電與網路之傳輸及 電磁波干擾等因素導致定位精度不佳,直接影響空三平差精度,因此本研 究採動態後處理的方式取得取像時對應的 GNSS 觀測量輔助熱像定位定 向。
第三節 誤匹配點剔除
本研究使用商用軟體 Pix4Dmapper 匹配空三平差所需之連結點,其原 理是使用特徵點匹配的方式匹配對應像點,相較於傳統航測軟體 IMAGINE Photogrammetry 所使用的正規化互相關(Normalized. Cross-Correlation, NCC) 區域式匹配的方法更能匹配到更多像點,但也伴隨著較多的誤匹配點,因 此怎麼去過濾這些誤匹配點變成為本研究的一個課題。 根據 Forlani et al.(2015),基本的過濾方式有核線約束的型式,可以使用 相對方位來形成核面條件,但需要良好的估計值;亦可使用窮舉搜尋法來 找尋誤匹配點,但會相當耗時(Pozzoli et al., 2004)。 而立體像對的影像坐標點之線性關係可透過基礎矩陣 (Fundamental Matrix) F(用於未率定相機)或必要矩陣(Essential Matrix)E (用於已率定相機) 建立,並透過該約制條件檢測誤匹配像點。F-matrix 至少需要七個對應像點 求解,而 E-matrix 則是五個對應像點,且其估算方式也需十分嚴謹,特別 是當資料有雜訊時,有可能使解算結果不穩定(Zhang et al., 1995;Hartley and Zisserman, 2004;Nister, 2004);而於非常短的基線或近退化的情況(如 純粹的相機旋轉)也會產生不可靠的結果;且在核線上的錯誤匹配點仍然無 法偵測出來。若同時考慮三張影像的相對幾何關係,則可以消除大部分的 離群值(即誤匹配點)。
三焦張量(trifocal tensor)T,即由三張影像中之七個影像對應點推估求得, 以此可約制三張影像上的匹配點的對應關係。透過此法,在大多數的配置 中都是能克服並找出誤匹配點(Hartley and Zisserman, 2004)。另外,使用三 張影像以區域光束法求解並用資料蒐評法(Data Snooping)偵測離群值也是 能剔除誤匹配點的方式之一(Roncella et al. 2011; Barazzetti et al. 2010, 2011)。
穩健估值法(Robust Estimation)是種預防假設模型有偏差的方法,相較 於上述的資料搜評法採用診斷並從假設模型中辨識出誤差的方式不同,其 是將可能含有粗差的觀測值利用降權的方式將其排除在計算成果外(李良 輝,2014)。另外在無多餘解之空間中可以使用 RANSAC 設定其閥值來剔 除誤匹配點(Fischler & Bolles, 1981)。
小結:
由上述可知,三焦張量在能較其他方式有效地剔除誤匹配點,因此本研 究擬用三影像中之對應像點求解三焦張量,再以 RANSAC 挑出最佳之三焦 張量,最後進行誤匹配點剔除。
第四節 獲取地表溫度
熱能在空氣中傳遞時會受到高度及大氣狀態的影響,因此從高空中向地 面拍攝往往很難獲得地面真實溫度。Bern et al. (2009)以 UAS 航拍熱像對農 作物進行環境監測,相較於衛載熱像所獲得的資訊不僅能得到較高的解析 度並且具有高機動性。其後產製之正射熱像解析度為 40 公分,並且使用 MODTRAN 輻射轉換模型將大氣影響量消除以校正溫度,結果顯示其精度 從 4K 升至 1K,再度說明了大氣影響熱輻射傳遞甚鉅。Amici et al. (2013) 以多旋翼 UAV 搭載 TC3600 熱像儀對義大利西南邊的泥火山進行低空航拍 取像,並以 FLIR A310 同時在地面對實驗區進行拍攝,再將兩者對同一地 表點位進行比較,成果顯示溫度大致相符(34°C 和 34.7°C);而在另一實驗 區所量測溫度也和透過現場量測泥火山溫度記錄相符,其成果足以說明 UAV 搭載熱像儀進行環境偵測之可行性。廖家翎(2013)利用單旋翼酬載 FLIR T360 以手動固定溫標的方式對地面航拍取像,之後對所有影像進行溫 度正規化讓溫度統一標準,再用空載光達所生成之 DSM 正射糾正並鑲嵌熱 影像,其平面精度約為 18 公分,最終與標準化之溫度資訊生成數值溫度表 面模型,其只將溫度標準化,並未將溫度校正至真實溫度。 小結: 若需獲得較真實地表溫度勢必要考慮大氣狀況作出相對應之改正,或是 需要以較低飛行高度取像之,則量測溫度將與實際溫度差異不大;而在對 熱影像做鑲嵌時須考慮到每張相片上的灰階值所代表之溫度是否統一以免 發生錯誤。
第三章 理論基礎與研究方法
第一節 相機率定模式
本研究有兩個實驗區,一為政治大學旁邊的指南溪及沿岸,另一為陽明 山國家公園之小油坑,兩實驗區所使用之熱像儀分別為 FLIR TAU640 以及 巨哥 XM6;指南溪及其沿岸在相機率定方面將採取野外率定場法。小油坑 航拍取像則是使用 XM6 熱像儀,但由於設備取得時間較晚,無法對其進行 野外率定場的實驗;不過由於其航線較多且拍攝面積大,因此本研究將採 用 In-Fligrt camera calibration 的方式嘗試解決熱像儀慮定之問題,以下分 別介紹兩種方法之理論基礎。一、 野外率定場法
由第二章文獻回顧中可知,因為 UAS 酬載非量測相機,相機需事先率 定。然而以近景方式率定相機,因物距非無窮遠,即時對焦無窮遠固定焦 距之後,近景取像受到影像品值影響導致率定結果仍造成系統性誤差(Lin and Chio, 2012、許翎㳖,2014),降低空三平差精度。故為克服不精確相機參 數,致使空三平差成果不佳,此外,UAS 酬載熱像儀航拍取像的距離都遠 至使得使用成像公式時,可將物距視為無窮遠,因此為率定更精確之相機 參數,率定時取像的距離亦應儘量遠至可視為無窮遠,不會影響率定之結 果,故本研究將以野外率定場法率定熱像儀。因此,本研究將於 iWitnessPro 攝影測量軟體內以人工量測率定標像坐標的方式執行熱像儀的野外率定場 法率定,而此軟體是以自率光束法率定熱像儀,故於本節將介紹其採用之率定使用之基本觀測方程式源自於共線式,於共線式基礎上增加Δx、 Δy 改正項(見式 3-1),而 Δx、Δy 則是依不同模式由不同參數所構成,並於 平差過程一併解算,稱為附加參數自率光束法平差。 𝑥𝑎− 𝑥0+ ∆𝑥 = −𝑓 [𝑚11(𝑋𝐴− 𝑋𝐿) + 𝑚12(𝑌𝐴 − 𝑌𝐿) + 𝑚13(𝑍𝐴− 𝑍𝐿) 𝑚31(𝑋𝐴− 𝑋𝐿) + 𝑚32(𝑌𝐴− 𝑌𝐿) + 𝑚33(𝑍𝐴− 𝑍𝐿) ] 𝑦𝑎 − 𝑦0+ ∆𝑦 = −𝑓 [ 𝑚21(𝑋𝐴− 𝑋𝐿) + 𝑚22(𝑌𝐴 − 𝑌𝐿) + 𝑚23(𝑍𝐴− 𝑍𝐿) 𝑚31(𝑋𝐴− 𝑋𝐿) + 𝑚32(𝑌𝐴 − 𝑌𝐿) + 𝑚33(𝑍𝐴− 𝑍𝐿) ] 式 3-1 其中: 𝑥𝑎, 𝑦𝑎 :像點之像坐標 𝑥0, 𝑦0 :像主點之像坐標 f :像主距 𝑋𝐿 , 𝑌𝐿 , 𝑍𝐿 :像片透視中心之物空間坐標 𝑋𝐴 , 𝑌𝐴 , 𝑍𝐴 :物點 A 之物空間坐標 𝑚𝑖𝑗 :旋轉矩陣元素,由姿態角所組成 iWitnessPRO 可使用率定之數學模式為 Australis 模式,其數學模式修改 Brown 物理模式所得(Beyer ,1992; Fraser, 1997),見式 3-2:
其中: ∆𝑥 , ∆𝑦 :像點改正量 ∆x = −∆x0− x̅ f∆f + x̅r 2K 1+ x̅r4K2+ x̅r6K3+ P1(r2+ 2x̅2) + 2P2x̅y̅ + b1x̅ + b2y̅ ∆y = −∆y0− y̅ f ∆f + y̅r 2K
1+ y̅r4K2+ y̅r6K3+ 2P1x̅y̅ + P2(r2+ 2y̅2)
其率定方式是先由人工方式分別對 9 張率定場影像上所佈設的鋁率定 標(見圖 3- 1)量測其像坐標,之後再以結合式 3-2 與式 3-1 建立之觀測方程 式,執行最小二乘解算相機參數,即像主距改正量∆f、像主點改正量∆𝑥0, ∆𝑦0 及輻射畸變差K1, K2, K3、離心畸變差P1, P2,非正交之畸變差b1, b2。 圖 3- 1 率定標 熱像儀率定場址選在國立政治大學體育館旁的空地,因為此區空曠且具 有明顯的 10m 高差,如下圖 3- 2 所示。參考 iWitnessPro 教學手冊,率定時 有以下幾點規範: (1) 至少四張相片。 (2) 拍攝一張影像後鏡頭需旋轉 90 度。 (3) 光線交會夾角需大於 30 度。 (4) 至少要 12 個物點以上。 且經計算後,航拍高度 60 m 時,成像公式中,物距的倒數值幾乎為零,
要求,及考慮光線交會,以率定場中心點為圓心 40m 為半徑,以高度 60m 的,以繞圓心的方式,分別在 8 個位置對地面率定場航拍取像(見圖 3-2 黃 色多邊形之交角處),最後回到圓心上方取像。以每張影像所涵蓋地面範圍, 設計出率定場為 21m X 26m (見圖 3-2 粉紅色四邊形),均勻佈設 32 個率定 標。位於下方航拍位置的航拍涵蓋地面範圍如綠色梯形所示,而 8 個航拍 位置取得 8 張影像所涵蓋地面八塊梯形交會可得出藍色八邊形之涵蓋範 圍。 圖 3- 2 熱像儀率定場
本研究所使用之 ORIMA 空三平差軟體率定使用的模式為 Brown 物理模式, 其理論公式如下,而本研究僅率定像主點偏移量、像主距和輻射畸變差。 ∆y = y0 + y[a1(r2− r 02)2+ a2(r4− r04) + +a3(r6− r06)] + b1x + b2y +𝑦 𝑓[c1(x 2− y2) + c 2x2y2+ c3(x4− y4)] +d6𝑥 + d7x2+ d 8x2𝑦 + d9𝑥𝑦2+ d10x2y2 式 3- 3 其中 ∆𝑥 , ∆𝑦 :像點改正量 𝑥0, 𝑦0 :像主點偏移量 f :像主距 a1, 𝑎2, 𝑎3 :輻射畸變差 b1, b2 :仿射畸變差 c1, 𝑐2, 𝑐3 :底片不平坦 d1, … , d10 :底片變形及非輻射方向畸變差 ∆x = x0 + x[a1(r2− r 02)2+ a2(r4− r04) + +a3(r6− r06)] + b1x + b2y +𝑥 𝑓[c1(x 2− y2) + c 2x2y2+ c3(x4 − y4)] +d1𝑥𝑦 + d2x2 + d2x2+ d3x2𝑦 + d4𝑥𝑦2+ d5x2y2
第二節 GNSS 輔助光束法空三平差理論
本研究採用的是 GNSS 的動態後處理(PPK)的技術求解航拍軌跡,之後 取得熱像對應的 GNSS 觀測量,再用其輔助熱像光束法空三平差執行影像 定向並進行後續研究,因此本節先簡述 GNSS 的動態後處理(PPK)技術求解 航拍軌的原理。再說明 GNSS 輔助光束法空三平差理論之理論。一、 GNSS 動態後處理技術原理與航拍軌跡獲取方法
動態後處理(PPK),是在接收所有的衛星觀測資料後(包含移動站與參考 站),再以後續處理的方式進行解算。後處理還可以對衛星訊號的觀測量進 行平滑化,降低雜訊與多路徑等效應,可得到較為合理的定位成果(張詒祥, 2013)。而其解算方式是利用差分技術消除大部分誤差項,所建立之電碼與 載波相位的二次差分方程式可以消除衛星、接收機鍾差、對流層傳播誤差 以及電離層傳播誤差,其數學關係式如下式 3- 4 所示。 𝑃𝑖𝑗𝑘𝑖 = (𝑃𝑖𝑘− 𝑃𝑖𝑙) − (𝑃𝑗𝑘− 𝑃𝑗𝑙) = 𝜌𝑖𝑗𝑘𝑖 + 𝐼𝑖𝑗𝑘𝑖 + 𝑇𝑖𝑗𝑘𝑖+ 𝜀𝑃 𝑖𝑗𝑘𝑖 Φ 𝑖𝑗 𝑘𝑖 = (Φ 𝑖 𝑘 − Φ 𝑖 𝑙 ) − (Φ 𝑗 𝑘 − Φ 𝑗 𝑙 ) = 𝜌𝑖𝑗𝑘𝑖− 𝐼𝑖𝑗𝑘𝑖+ 𝑇𝑖𝑗𝑘𝑖+ 𝜆𝑁𝑖𝑗𝑘𝑖+ 𝜀 Φ𝑖𝑗𝑘𝑖 式 3- 4𝐼 :電離層影響量 𝜆 :載波相位觀測量之波長 𝑁 :整數週波值 K、l :代表兩顆不同衛星 i、j :代表地面接收儀之參考站與移動站 本研究分別將搭載在 UAS 上的雙頻 GNSS 載波相位觀測資料(10Hz)與 在地面主站雙頻 GNSS 載波相位觀測資料(10Hz)進行動態後處理解算求得 飛行軌跡資料。由於指南溪實驗區所使用熱像是以錄像的方式取像,而錄 影時間和解算後 GNSS 觀測量記錄的時間有一系統差,因此本研究在設計 航拍計劃時,於每個設計之航點位置均使四旋翼 UAS 停留約五秒。之後再 以 Arc map 開啟飛航軌跡坐標檔並分析其位移趨勢,最後取每段時間間格 軌跡點明顯聚集之平均數作為該熱像對應之 GNSS 觀測量,用以輔助光束 法空三平差。 於小油坑實驗區所使用的巨哥 XM6 具拍照功能,因此可於現地拍攝即 時儲存影像和記錄取像時間,但因拍攝取像時間所紀錄之最小單元為整數 秒,而飛行軌跡資料為每秒 10 筆,因此將整數秒範圍內之 10 筆 GNSS 觀 測量取平均,做為熱像對應之 GNSS 觀測量,用以輔助光束法空三平差。
二、 GNSS 輔助光束法空三平差
本研究欲使用 GNSS 輔助光束法空三平差求解熱像外方位參數及連結 點之物空間坐標,因此本研究之觀測量可分成三類,分別是 GNSS 觀測量、 像點觀測量以及地面控制點觀測量。GNSS 的觀測量是以天線中心為基準,而非影像之透視中心,此兩點間 的空間距離稱作 GNSS 天線偏移誤差。過去文獻提及線性漂移參數(drift parameters)可克服天線偏移誤差的問題(Blankenberg, 1992);然而因為旋翼 UAS 之飛行速率較慢且於停旋時會隨機晃動,使其 GNSS 觀測量無法以線 性漂移參數處理。本研究所使用之四旋翼 UAV 而由於 UAV 上安裝 IMU 位 於穩定平台正上方,且天線剛好安裝於定義 IMU 的 Y 軸上,因此可透過 IMU 所記錄之姿態參數ω、ψ、κ 計算 GNSS 觀測量於各方向之改正量,IMU 精 度雖不高,但相機透視中心與天線位置僅有 36 公分左右的距離,若是 IMU 所記錄之資料偏了 1 度,其對改正上的影響也不會太大。因此可將 GNSS 觀測量歸算至透視中心,並將歸算至透視中心的 GNSS 觀測量、透視中心 觀測量組成間接觀測方程式,如式 3- 5。 𝑋𝐺𝑙 + 𝑣𝑋 𝐺𝑙 = 𝑋𝐿 𝑙 𝑌𝐺𝑙+ 𝑣𝑌 𝐺𝑙 = 𝑌𝐿 𝑙 𝑍𝐺𝑙 + 𝑣𝑍 𝐺𝑙 = 𝑍𝐿 𝑙 式 3- 5 𝑙 :第 𝑙 張像片 𝑋𝐿𝑙, 𝑌𝐿𝑙, 𝑍𝐿𝑙 :像片透視中心之三維坐標,視為未知 𝑋𝐺𝑙,𝑌𝐺𝑙, 𝑍𝐺𝑙 :歸算至透視中心 GNSS 觀測量之三維坐標,視為觀測量 𝑣𝑋 𝐺𝑙, 𝑣𝑌𝐺𝑙, 𝑣𝑍𝐺𝑙 :歸算至透視中心 GNSS 觀測量之三維坐標改正數 假設像點經像點∆𝑥 , ∆𝑦 改正後與其對應物點及像片透視中心應位於
𝑥𝑖 − 𝑥0 + ∆𝑥 = −𝑓 [𝑚11(𝑋𝑖−𝑋𝐿𝑙)+𝑚12(𝑌𝑖−𝑌𝐿𝑙)+𝑚13(𝑍𝑖−𝑍𝐿𝑙) 𝑚31(𝑋𝑖−𝑋𝐿𝑙)+𝑚32(𝑌𝑖−𝑌𝐿𝑙)+𝑚33(𝑍𝑖−𝑍𝐿𝑙) ] 𝑦𝑖 − 𝑦0 + ∆𝑦 = −𝑓 [ 𝑚21(𝑋𝑖−𝑋𝐿𝑙)+𝑚22(𝑌𝑖−𝑌𝐿𝑙)+𝑚23(𝑍𝑖−𝑍𝐿𝑙) 𝑚31(𝑋𝑖−𝑋𝐿𝑙)+𝑚32(𝑌𝑖−𝑌𝐿𝑙)+𝑚33(𝑍𝑖−𝑍𝐿𝑙)] 式 3- 6 𝑙 :第 𝑙 張像片; 𝑖:第𝑖個物點 ∆𝑥 , ∆𝑦 :像點改正量 𝑥𝑖, 𝑦𝑖 :像點之影像坐標 𝑥0, 𝑦0 :像主點之影像坐標 F :像主距 𝑋𝐿𝑙, 𝑌𝐿𝑙, 𝑍𝐿𝑙 :像片透視中心之物空間坐標 𝑋𝑖 , 𝑌𝑖 , 𝑍𝑖 :物點 𝒊 之物空間坐標 𝑚𝑖𝑗 :旋轉矩陣元素,由姿態角所組成 為避免施測地面控制點之精度不佳,降低平差系統精度,故將地面控制 點亦視為未知數求解,即將地面控制點視為虛擬觀測量,其觀測方程式表 示如下式 3- 7。 𝑋𝑗0+ 𝑣𝑥𝑗 = 𝑋𝑗 𝑌𝑗0+ 𝑣𝑦𝑗 = 𝑌𝑗 𝑍𝑗0 + 𝑣𝑧𝑗 = 𝑍𝑗
j:第 j 個控制點 式 3- 7 𝑋𝑗0, 𝑌𝑗0, 𝑍𝑗0 :控制點坐標之觀測量 𝑋𝑗, 𝑌𝑗, 𝑍𝑗 :待求解之控制點坐標 𝑣𝑥𝑗, 𝑣𝑦𝑗, 𝑣𝑧𝑗 :控制點觀測量改正數
最後將上述觀測方成式組成平差系統,同時求解未知數即是本研究之 GNSS 輔助光束法空三平差或 GNSS 輔助 in-flight camera calibration 之理 論。
第三節 誤匹配點剔除
本研究使用 Pix4Dmapper 之影像匹配得到每張影像上匹配之連結點及 其影像坐標,並採用三焦張量約束像點間的幾何關係以剔除誤匹配點,以 下將簡述其原理。
Hartley and Zisserman (2004)一書中提到三焦張量之定義為描述三張影 像核線幾何相對關係,透過此種關係能約束所匹配出來的連結點,使誤匹 配點發生機率降低,三焦張量原理乃先由線段 L 於三張影像上之相對關係 如下圖 3- 3 所示推導而得。
圖 3- 3 線段 L 於三張影像上之相對關係(Hartley and Zisserman, 2004)
上圖中 C、𝐶′、𝐶"表示三張影像之透視中心,𝑙、𝑙′、𝑙"為空間中線段 L 在各張影像之投影。若假設無任何相機畸變差,則 C、𝐶′、𝐶"之投影矩陣 可表示為下式 3- 8: 𝑃 = [𝐼|0] 𝑃′ = [𝐴|𝑎4] 𝑃" = [𝐵|𝑏4] 式 3- 8
A 與 B 為 3 × 3 矩陣,而𝑎𝑖和𝑏𝑖分別表示為𝑃′和𝑃"矩陣的第 i 行向量。接 著把三投影矩陣整理為一 4 × 3 的 M 矩陣: M = [𝑃𝑇𝑙、𝑃′𝑇𝑙′、𝑃"𝑇𝑙"] = [ 𝑙 𝐴𝑇𝑙′ 𝐵𝑇𝑙" 0 𝑎4 𝑏4 ] = [𝑚1、𝑚2、𝑚3] 式 3- 9 若有一點 X 於線段 L 上,則 X 於三張影像之投影點會與𝑙、𝑙′、𝑙"內積 為 0,如下式 3- 10 表示 M𝑇X = 0 式 3- 10 又在 L 線段上的任意點 X 皆能用兩線性獨立的𝑋1和𝑋2向量來做線性組 合: X = 𝛼𝑋1+ 𝛽𝑋2 式 3- 11 將式 3- 11 代入式 3- 10 可得: M𝑇X1 = 0 M𝑇X2 = 0 式 3- 12 由上式 3- 12 可知 M 矩陣有兩維的 null-space,而根據 rank–nullity 理 論可知因為 M 矩陣的秩為 2,所以任一矩陣中的行向量皆可由其他兩個行
式 3- 14 最後將式 3- 13 和式 3- 14 之結果與關係帶回 M 矩陣其餘之行向量: 𝑙 = (𝑏4𝑇𝑙")𝐴𝑇𝑙′− (𝑎4𝑇𝑙′)𝐵𝑇𝑙" = (𝑙"𝑇𝑏 4)𝐴𝑇𝑙′− (𝑙′ 𝑇 𝑎4)𝐵𝑇𝑙" 式 3- 15 由此可推至𝑙的第 i 個行向量可表示為: 𝑙𝑖 = 𝑙"𝑇(𝑏4𝑎𝑖𝑇)𝑙′− 𝑙′𝑇(𝑎 4𝑏𝑖𝑇)𝑙" = 𝑙′𝑇(𝑏4𝑎𝑖𝑇− 𝑎4𝑏𝑖𝑇)𝑙" = 𝑙′𝑇𝑇𝑖𝑙" 式 3- 16 由式 3- 16 可知𝑇𝑖 = 𝑏4𝑎𝑖𝑇− 𝑎4𝑏𝑖𝑇,所以𝑙可表示為: 𝑙𝑇= [𝑙′𝑇𝑇1 𝑙′ 𝑇 𝑇2 𝑙′ 𝑇 𝑇3] 𝑙" = 𝑙′𝑇[𝑇1 𝑇2 𝑇3]𝑙" 式 3- 17 以上為線-線-線投影推導之證明,再透過在線上的點與該線內積為 0 的理論可推演至點-線-線;接著若有兩點分別在線段投影至兩張影像的投影 線上,則該兩點會存有一個 homography 矩陣(H)的關係,由此可再推演得 到點-線-點。最後由同一平面上向量外積為零的理論出發,可推得點-點-點 的公式: ⌊𝑥2 ×⌋ (∑ 𝑥𝑙𝑖𝑇𝑖 𝑖 ) ⌊𝑥3×⌋ = 03𝑋3 式 3- 18 其中⌊𝑥2×⌋為 skew-symmetric matrix,可代表矩陣的外積。將上式 3- 18 做
𝐴𝑡 = 0 式 3- 19 式中 t 為 tirfocal tensor,是由 27 個列向量所組成,而將式 3- 18 展開可 變成: x𝑘(x′𝑖x"𝑙𝑇𝑘𝑗𝑙 − x′𝑗x"𝑚𝑇𝑘𝑖𝑙− x′𝑖x"𝑙𝑇𝑘𝑗𝑚+ x′𝑗x"𝑙𝑇𝑘𝑖𝑚) = 0𝑖𝑗𝑙𝑚 式 3- 20 式中 i、j、l、m 分別代表了物點 X 在三張影像上的投影點的 x、y、z, 以及 trifocal tensor 所對應的位置的關係。一組像對代入上式可得到 9 條方 程式,但只有四條線性獨立;又因為投影點位於二維平面的影像上,所以 z 值可皆設為 1,根據上述可以直接化簡式 3- 20 為: x𝑘(x′𝑖x"𝑙𝑇𝑘33− x"𝑙𝑇𝑘𝑖3− x′𝑖𝑇𝑘3𝑙+ 𝑇𝑘𝑖𝑙) = 0𝑖𝑗𝑙𝑚 式 3- 21 由此可知 trifocal tnesor 未知數有 27 個,而一組對應像點可得到四條獨 立觀測方程式,因此最少需要七組對應像點,計算時可將七組觀測量同時 列出 28 條觀測方程式,並使用奇異值分解(SVD),即可解算出三焦張量。 使用上述線性解法在三張影像中能算出多個三焦張量,因為對應像點通 常都會多於 7 組。而如何在三張影像中去選擇出一個最適化的三焦張量, 本研究擬採用隨機樣本一致性 (RANSAC)的方法挑選最佳三焦張量。此法
(1 − 𝑤𝑛)𝑘= 1 − 𝑧 式 3- 22 通常 RANSAC 偵測法能有效地處理極大量的樣本。但往往必須憑經驗先 定義變量 n, w 和 z 的數值,從而估算篩選 k 次數。若將此規則套用在本 研究中,假設三張影像中所對應之像點為 100,n 即是 7 組對應像點,w 即 是設定之閥值,今隨機抽出 7 組對應像點求解出 trifocal tensor,之後將此 其餘對應像點帶入中三焦張量檢驗,判斷每點是否符合所設閥值且區分出 正確與錯誤的點的筆數,如此重複 k 次最後找出含有最多筆正確像點的 trifocal tensor,所得到之結果便是最能代表三張影像的相對關係。 本研究中將以連續編號之鄰近三張影像求解出一組三焦張量並搭配 RANSAC 剔除誤匹配點。
第四節 產製數值溫度表面模型
承接上節所求得之經三焦張量模式之 RANSAC 除錯之像匹配點匯入軟 體 ORIMA 再粗差偵錯執行 GNSS 輔助光束法空三平差解算,接著產製 DSM 和正射影像。如第一章緒論所述,熱像儀能記錄物體表面之輻射值,再透 過轉換公式將輻射能量值轉換成溫度並以灰階值的方式顯示之。最後產製 之正射熱像之地面解析度與原始影像對應之地面解析度不同,為獲取與原 影像相同地面解析度之正射熱像,本研究將使用反解法(數字攝影測量學, 2009)求得對應原始影像解析度之溫度值。由於本研究於指南溪試驗區所使 用之設備 FLIR-TAU 640 並未提供輻射能量轉換後之原始溫度值檔,因此僅 對巨哥 XM6 執行此步驟。航測軟體 IMAGINE Photogrammetry 2015 在產製 正射熱像時會產製和每張影像相同範圍之正射熱像。本研究將每張正射熱 像中對應原始熱像地面解析度之每個地物點的位置坐標搭配 DSM 取得 3-D 坐標之後,以反解法回推至原始影像上所對應之像點位置,其理論依據也 是基於式 3- 6 的共線式。巨哥 XM6 能將所記錄之溫度值資訊以 CSV 檔案 的形式輸出,將反解所得到之相對應位置之灰階值以 CSV 檔案上的相對應 溫度數值替換並另外生成與原始影像相同地面解析度之灰階值顯示之溫度 影像。最後將重新再取樣的溫度灰階或溫度值正射熱像和 DSM 匯入 Arc Map 並套疊之,即能產製出數值表面溫度模型(DSTM)。第四章 研究材料與實驗
本章將對應用於實驗之儀器設備及軟體逐一介紹與說明,接著說明並分 析熱像儀之率定結果,最後以相同研究流程分別對指南溪實驗區與小油坑 實驗區進行實驗結果之討論與分析。第一節 儀器及軟體
一、 GNSS 接收模組:BD970
BD970 為 Trimble 公司所開發設計(Trimble, 2010),此接收模組體積小、 重量輕(見圖 4- 1),易於安裝於 UAV 上。其可接收多個衛星系統,包括 GPS L2C/L5、GLONASS L1/L2、Galileo 及北斗衛星系統,且能夠提供公厘級之 定位精度。此外,BD970 具有保護高品質 GNSS 訊號之設計,以避免訊號 被干擾。此接收模組具有一個 USB、控制器區域網路(Controller Area Network,CAN)介面、乙太網端口及三個 RS -232 之高速數據傳輸端口,其 亦支援多種網路協議,如 HTTP、動態 DNS 及 NTP 服務等,不同資料格式 皆可互相流通,其相關規格如表 4- 1。圖 4- 1 Trimble BD970 接收模組及天線 表 4- 1 Trimble BD970 規格 體積 100 mm × 60 mm × 11.6 mm 重量 62 g 天線種類 ANTCOM GPS antenna 初始化時間 <10 seconds 初始可靠度 >99.9% 體積 100 mm × 60 mm × 11.6 mm 重量 62 g 天線種類 ANTCOM GPS antenna 於本研究中,BD970 模組資料接收設定如下: (一) GPS 接收頻率為 10Hz,即每秒接收 10 筆雙頻載波相位觀測量。 (二) 當 GPS 衛星高程角低於 15 度時,易造成多路徑效益,故將低於
二、 熱像儀:FLIR-TAU 640
FLIR Tau 640 熱像儀(見圖 4- 2),其特色是輕量化且感測像元數 640 x 480 pixels 是目前能用 UAV 酬載中解析度最高的熱像儀,其規格見表 4- 2: 圖 4- 2FLIR Tau 640 熱像儀 表 4- 2 熱像儀 FLIR Tau 640 感測器 FPA, VOx 非制冷焦平面 鏡頭焦長 25mm 感測器解析度 640 x 480 pixels 畫面更新頻率 30Hz 像元尺寸 17μm 靈敏度 < 50mK at F/1.0 類比影像輸出 NTSC 操作溫度範圍 -40°C ~ +80°C圖 4- 3 H.264 MINI DVR 錄影卡
三、 熱像儀 :巨哥電子 XM6
熱像儀巨哥 XM6(見圖 4- 4),其特色是感測像元數 640 x 480 pixels 是目 前能用 UAV 酬載中解析度最高的熱像儀且能輸出溫度值資訊,其規格見表 4- 3:
圖 4- 4 巨哥 XM6 熱像儀 表 4- 3 熱像儀巨哥 XM6 規格表 感測器 非制冷焦平面 鏡頭焦長 25mm 畫面更新頻率 50Hz 感測器解析度 640 x 480 pixels 像元尺寸 17μm 靈敏度 < 60mK at F/1.0 視場角 25°X19° 影像儲存格式 BMP、JPG 操作溫度範圍 -20°C ~ 150°C
四、 熱像儀率定軟體:iWitnessPRO
iWitnessPRO 為自動率定相機軟體,其率定原理為於某一空間內佈設軟 體能自動偵測之 20 個率定標,以相機拍攝後,透過自動量測影像上每個率 定標位置,自動解算求得描述相機鏡頭之參數。率定時要求 20 個率定標必 須均勻分布且景深差異需 15~20 公分,而率定取像之交會角度需介於 70~100 度之間,至少須四個以上不同相機方向拍攝,每張影像以涵蓋最多 率定標為取像目標。 本研究使用此軟體並以人工量測率定標的方式,解算以野外率定場法率 定指南溪實驗區使用之 FLIR-TAU 640 熱像儀和以近景率定場法率定小油 坑實驗區使用之 XM6 熱像儀。五、 四旋翼 UAS :AI-RIDER YJ-1000-HC
AI-RIDER YJ-1000-HC 多旋翼 UAS(見圖 4- 5)由剛鈺公司提供,可於荷 重 2500g 下飛行至少 20 分鐘,適合小範圍的拍攝任務。於機上設有 IMU 可記錄姿態參數,更新頻率為 100Hz 以上,且可抗穩定風速 12 m/sec,可 抗瞬間風速 18 m/sec,詳細性能規格(剛鈺,2015)見下表 4- 4。
圖 4- 5 AI-RIDER YJ-1000-HC 多旋翼 UAS(剛鈺,2015) 表 4- 4 AI-RIDER YJ-1000-HC 多旋翼 UAS 特性
載具淨重:5500g(含電池) 飛行輔助系統:AAHRS, DPH, DFC (a)機身 (b)IMU
飛行時間:21~43 分 動態位置與高度可自主保持 飛行半徑:< 750m
六、 影像匹配軟體:Pix4Dmapper
Pix4Dmapper 是由瑞士 Pix4D 公司所研發之最新影像與三維地理精確 重建技術。Pix4Dmapper 是一套專業航測影像軟體,能快速、自動化處理 任何相機拍攝之航空影像、傾斜影像、地面影像,且支援各種波段,已達 公分級的三維精度,最後能迅速的產製正射影像、數值地表模型、外方位 參數等成果報表。 此外 Pix4Dmapper 研發了 rayCloud(光雲)的技術,融合了最新電腦視覺 原理及傳統嚴謹的航空攝影測量技術,透過三維點雲與原始影像的結合, 可以大幅改善立體像對多光束交會的三維匹配點精度,使後續產製出來的 正射影像、數值地形成果可以更精確,以利使用者在後續分析與應用上更 容易、更準確。(Pix4Dmapper, 2015) 本研究將借助 Pix4Dmapper 強大的影像匹配能力產製出後續 GNSS 輔 助光束法空三平差執行影像定位定向所需之連結點研究。七、 航測軟體:IMAGINE Photogrammetry 2015 & ORIMA
IMAGINE Photogrammetry 2015 是掛載於 ERDAS IMAGINE 之航測模 組,可對各類航拍影像執行自動匹配連結點、空三平差、產製 DEM、正射 鑲嵌影像及 3D 建物模型等功能,亦可執行飛行模擬,是專為攝影測量所開 發設計之軟體。ORIMA 為空三平差模組,執行空三平差並產製報表。本研
究將使用此軟體執行空三平差、IMAGINE Photogrammetry 2015 產製 DSM 及正射鑲嵌影像,供後續數值表面溫度模型製作使用。
第二節 熱像儀率定實驗
一、 指南溪實驗區熱像前處理
用於指南溪實驗區熱像儀為 FLIR TAU 640,由於儀器本身限制以及欲 得到較高重疊率,航拍取像是以 H.264 MINI DVR 錄影卡錄製熱影像,根 據 ITU-R BT.601,取樣的時候長寬的取樣比例不是 1:1,原本的 640 pixels 會乘上 1.1 倍變為 702 pixels,並在左右各補 8 個無資料像點,因此錄影卡 所儲存之片幅大小為 720 pixels × 480 pixels。此大小和熱像儀 CCD 大小 (640 pixels × 480 pixels)不符,又加上裁切影像左下角留有時間標記也會影 響後續處理,必須先進行影像前處理。因此本研究使用 Photoshop 設定巨 集將其裁切和重新取樣,最後將標示時間的影像反黑。本研究將左右留空 像元(見圖 4- 6a 紅色標註)和標示時間的影像區(見圖 4- 6a 藍色標註)進行處 理後得到可後續使用之影像(見圖 4- 6b)。之後實驗所用之熱像都會先經過 此前處理後再進行後續研究。 (a) 720 pixels × 480 pixels (b) 640 pixels × 4480pixels
二、 率定實驗
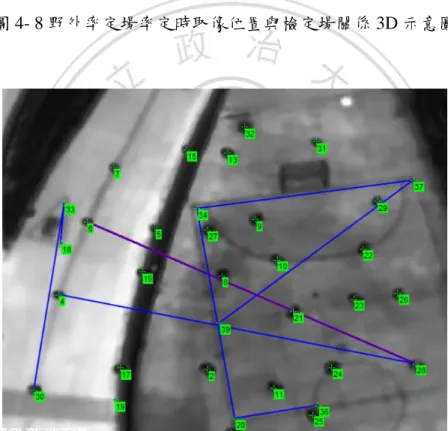
(一)指南溪區實驗之熱像儀率定 本實驗採野外率定場,以第三章所述之模式環拍,獲取九張相片,如下 圖 4- 7。再進入 iWitness Pro 軟體中以人工點選的方式量測率定標之位置並 計算出相機參數(表 4- 5),透過光束從透視中心到率定標之 3D 示意圖(見圖 4- 8)可方便了解其相對位置是否正確,且本實驗為檢核其率定成果是否正 確,實地觀測 9 段線段之距離並將其中最長且高低差最大之線段用來作為 設定模型比例尺之用(見圖 4- 9),其餘 8 段作為檢核,檢核成果見下表 4- 6。 圖 4- 7 野外率定場所使用的 9 張率定場影像 表 4- 5 熱像儀野外率定參數 焦距 24.9698mm 像主點偏移量(x0, y0) (0.2849mm, 0.1316mm) 輻射畸變差 K1 -7.1503e-004 輻射畸變差 K2 6.9475e-005圖 4- 8 野外率定場率定時取像位置與檢定場關係 3D 示意圖
表 4- 6 熱像儀野外率定檢核成果 線段(點號-點號) 檢核距離(m) 於軟體中量測(m) 較差(m) 34-36 7.40 7.58 0.18 35-36 5.49 5.66 0.17 34-35 9.19 9.48 0.29 3-37 15.89 15.98 0.09 37-31 4.21 3.89 -0.32 32-34 19.55 19.71 0.15 32-36 24.18 24.45 0.27 32-39 16.83 17.01 0.18 RMSE 0.22 上表中之檢核距離是以全測站量測兩測回之距離取平均而得,而由上表 可知每段距離較差值都在 30 公分以內。若以實驗場設計在航高 60m 時, GSD 應為 4 公分,其 RMSE22 公分,約為 5 像元,此乃熱像之影像品質不 佳,導致在人工點選率定標方面無法十分精確所造成;因本實驗之成果將 用於監測領域之地溫研究,而非測量製圖,因此此率定結果對於後續應用 已足以使用。 (二)小油坑實驗區之熱像儀率定
公司頂樓之牆面,率定方式與野外率定場相同,距率定場約 10m,以率定 場之中心點為原點、半徑為 8m,均勻分布的八個位置以及中間共九個位置, 取像共 12 張(有三個方向取兩張照片),如下圖 4- 10。 圖 4- 10 巨哥 XM6 率定場所使用的 12 張率定場影像 接著使用 iWitness Pro 軟體,並以人工點選的方式量測率定標之位置並 計算出相機參數,見表 4- 7,其 3D 位置如下圖 4- 11 所示。 表 4- 7 巨哥 XM6 經近景率定後相機參數成果 焦距 25.1623 mm 像主點偏移量(x0, y0) (-0.2249mm, 0.4804 mm) 輻射畸變差 K1 5.6957e-004 輻射畸變差 K2 6.1859e-007 輻射畸變差 K3 -1.7373e-008 離心畸變差 P1 -6.0766e-005 離心畸變差 P2 -1.2939e-004
圖 4- 11 近景率定場率定時取像位置與檢定場關係 3D 示意圖 率定時於現地實以鋼捲尺量測 6 段線段距離,其中最長一段距離作為設 定模型比例尺之用(圖 4- 12 紅色線段),其餘 5 段作為檢核之用,比較成果 如下表 4- 8。
表 4- 8 巨哥 XM6 近景率定檢核成果 線段(點號) 檢核距離(m) 於軟體中量測(m) 較差(m) 33-42 0.96 0.96 -0.00 16-43 1.63 1.65 0.02 33-44 0.96 0.90 -0.06 41-46 1.33 1.33 -0.01 11-45 1.8 1.89 0.09 RMSE 0.05 上表中之檢核距離為實地使用鋼捲尺量測的距離,與軟體中量測距離之 較差都在 10 公分內,RMSE 為 5 公分。如下圖 4- 13 可知,率定標雖有受 熱,但影像品質都較模糊,使得率定成果受到影響。,但此精度已足夠作 為 in-flight camera calibration 自率光束法之初始值。