國 立 交 通 大 學
土木工程學系
碩 士 論 文
唯輸出理論之地震損傷探測分析與實驗驗證
Experimental Verification of Damage Localization of
Output-Only Structural Systems Using Seismic Response Data
研究生:林怡廷
指導教授:王彥博 教授
唯輸出理論之地震損傷探測分析與實驗驗證
Experimental Verification of Damage Localization of
Output-Only Structural Systems Using Seismic Response Data
研 究 生:林怡廷 Student:Yi-Ting Lin
指導教授:王彥博 博士 Advisor:Dr. Yen-Po Wang
國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Civil Engineering
College of Engineering
National Chiao Tung University
In Partial Fulfillment of the Requirement
For the Degree of
Master of Science
in
Civil Engineering
June 2012
Hsinchu, Taiwan, Republic of China
中華民國一 ⃝ 一年六月
唯輸出理論之地震損傷探測分析與實驗驗證
研究生:林怡廷 指導教授:王彥博 博士
國立交通大學土木工程研究所
摘要
本研究針對唯輸出系統之 SSI 系統識別與損傷探測方法進行理論分析 與試驗驗證,並與 SRIM 系統識別分析進行比較。針對唯輸出系統, SSI 系統識別法係在隨機預測狀態空間系統之架構下,以觀測結構所有或部分 樓層之加速度反應歷時訊號為輸出向量,由輸出向量序列間之協方差關係 識別出狀態空間參數,作為後續結構損傷探測分析的依據。在結構損傷探 測方法上,除採用 Bernal 所提出之狀態空間 DLV 法之外,本研究並提出 直接位移法﹙Direct Displacement Method, DDM﹚,兩者皆可由識別所得之 等效系統參數進行損傷探測分析。直接位移法的概念係考量剪力屋架之樓 層剪力與層間變位之線性關係,將判斷結構受損與否之加權應力指標 (Weighted Stress Index, WSI)轉換為加權相對位移指標(Weighted Drift Index, WDI)。振動台試驗以 White Noise 及 El Centro 地震為輸入擾動,並 考慮完全觀測(Full Observation)與部分觀測(Partial Observation)條件 下進行損傷探測分析。整體而言,SRIM 之系統識別結果較精確,但 SSI 忍受噪音干擾之能力較佳,特別是在高頻振態的識別上。振動台試驗結果 顯示,在完全觀測條件下,無論輸入擾動為 White Noise 或 El Centro 地震, 以狀態空間 DLV 法進行損傷探測時,幾乎都能成功定位出結構之受損樓ii 結果之辨識度較佳。若以 DDM 法進行損傷探測,則在單一樓層破壞時, 兩種識別方法皆能成功辨識受損樓層;惟複數樓層破壞時,則兩者無法成 功辨識受損樓層。部分觀測僅採用 DLV 法進行損傷探測分析,在單一樓 層受損之條件下,由兩種識別分析結果均能成功定位出破壞樓層,除了於 1 樓或 5 樓(頂樓)未作觀測時可能發生誤判的情形;在複數樓層破壞時, 損傷探測之成功率皆不高。 關鍵字:唯輸出、破壞定位向量、隨機子空間識別法、柔度矩陣、直接位 移法
Experimental Verification of Damage Localization of Output-Only
Structural Systems Using Seismic Response Data
Student: Yi-Ting Lin Advisor: Dr. Yen-Po Wang
Department of Civil Engineering
College of Engineering
National Chiao Tung University
Abstract
In this study, theoretical and experimental verifications of stochastic
subspace identification (SSI) and damage localization techniques for
output-only systems have been explored and compared with the SRIM method.
The SSI technique is developed for output-only systems under the framework
of stochastic state-space system by observing full or partial floor acceleration
responses of the structures. Parameters of the state-space system are identified
from the covariance matrix consisting of the output state vector sequences, and
in turn serve as the basis for damage detection of the structures. The DLV
method developed by Bernal has been adopted for damage detection, along
with the direct displacement method (DDM) proposed in this study. Both
methods utilize the equivalent system parameters from system identification for
damage localization analysis. The concept of DDM is based on the linear
correlation of the story-shear with the story-drift for shear-type buildings so
iv
a white noise scenario and the 1940 El Centro earthquake are considered as the
seismic inputs with full or partial observation on structural responses for
damage detection. Simulation results indicate that the SRIM is in general better
than the SSI in terms of accuracy of the identified parameters, despite the SSI
shows better noise-bearing capability in the identification of mode shapes, for
high-frequency modes in particular. Experimental results indicate that, for
either the white noise or El Centro earthquake as the input under the condition
of full observation, almost all the damaged conditions can be successfully
identified if the state-space DLV method is adopted for damage detection,
regardless of SRIM or SSI is considered for system identification. Those with
SRIM for system identification perform better in terms of correctness on
damage localization. When the DDM is adopted for single-damage conditions
with full observation, both the SRIM and SSI helps in successfully identifying
the damaged story. Both methods fail, however, in multiple-damage conditions.
In partial observation conditions, only the DLV method is adopted in the
analysis. Under single-damage conditions, both the SRIM and SSI help in
successfully identifying the damaged story, except that miss-judgment might
occur if the first or top story is not observed. Both methods fail in
multiple-damage conditions with partial observation of the state vector.
Keywords:output-only, damage locating vectors (DLVs), flexibility matrix, stochastic subspace identification (SSI), direct displacement
誌謝
感謝王彥博老師兩年來的指導與教誨,讓我在課業與生活上都受益良 多。在論文寫作期間,老師費心的指導與修改,才能使本論文順利完成。 在此特向王彥博老師致上最誠摯的謝意。 於口試期間,承蒙國家地震中心林子剛博士、國家地震中心盧恭君博 士及嘉南藥理科技大學高清雲教授的指正,並提供寶貴意見,使本論文內 容更加完整,特別在此感謝感激之意。 感謝國立台灣大學羅俊雄教授,慷慨提供智慧型無線感測系統 ﹙NTU-WSU﹚,本研究的實驗才能成功完成。 感謝研究室諸學長李建良博士、陳逸軒博士、小羊學長、連峰學長、 柏霖學長與柏翰學長在研究與實驗上之指導;同窗黃罡及學弟阿廉、孟諺 的支援與協助。 大學四年與研究所兩年中,感謝交大田徑隊一直以來的鼓勵與陪伴, 不管實驗或研究多不順利,只要走到操場總是能充滿電,重新出發。 最後,謹以本文獻給我的爸爸、媽媽、姊姊、妹妹、狗狗 MOMO、 WiWi、彬彬、小貓哞哞、咩咩、妮妮、娸娸、比比,感謝他們多年來給我 的支持、關懷、鼓勵與包容,讓我能順利完成此論文。 謹誌於國立交通大學工程二館 2012 年 7 月目錄
摘要 ...i Abstract ... iii 誌謝 ... v 目錄 ... vii 表目錄 ... ix 圖目錄 ... xiii 第一章 緒論... 1 1.1 研究動機與目的 ... 1 1.2 文獻回顧 ... 3 1.3 論文架構 ... 11 第二章 結構系統識別分析理論 ... 13 2.1 前言... 13 2.2 狀態空間模型 ... 14 2.2.1 連續時間狀態空間方程式 ... 14 2.2.2 離散時間狀態空間系統 ... 16 2.3 SRIM 系統識別理論 ... 19 2.3.1 萃取矩陣 A 和 C ... 21 2.3.2 萃取矩陣 B 和 D ... 24 2.4 SSI 系統識別理論 ... 27 2.4.1 隨機過程 ... 27 2.4.2 隨機狀態空間系統之參數識別 ... 28 2.5 數值驗證 ... 32 2.5.1 萃取系統模態參數 ... 32 2.5.2 SRIM 之數值驗證 ... 33 2.5.3 SSI 之數值驗證 ... 35viii 第三章 土木結構之損傷探測分析 ... 55 3.1 前言... 55 3.2 DLV 損傷探測分析理論 ... 58 3.2.1 DLV 損傷探測分析理論之回顧 ... 58 3.2.2 系統柔度矩陣之建立 ... 61 3.3 直接位移法 ... 70 3.3.1 結構物理參數之重建 ... 70
3.3.2 比例柔度矩陣(Proportional Flexibility Matrix)之建立 ... 75
3.3.3 結構損傷探測之直接位移法 ... 77 3.4 數值驗證 ... 80 3.4.1 狀態空間 DLV 法之示範算例 ... 80 3.4.2 直接位移法之示範算例 ... 83 第四章 SSI 系統識別結合損傷探測分析之地震模擬試驗驗證 ... 121 4.1 前言... 121 4.2 振動台試驗設置 ... 121 4.3 完全觀測(Full Observation)條件下試驗結果與分析 ... 123 4.4 不足觀測(Partial Observation)條件下試驗結果與分析 ... 139 4.5 小結... 143 第五章 結論與建議 ... 248 結論 ... 248 參考文獻 ... 253
表目錄
表 2. 1 五層樓結構系統之結構參數與模態參數 ... 38 表 2. 2 (a) SRIM 識別五層樓結構系統之參數(NSRm0%) ... 39 表 2. 2 (b) SRIM 識別五層樓結構系統之參數(NSRm 5%) ... 39 表 2. 2 (c) SRIM 識別五層樓結構系統之參數(NSRm10%) ... 40 表 2. 2 (d) SRIM 識別五層樓結構系統之參數(NSRm15% ) ... 40 表 2. 3 (a) SSI 識別五層樓結構系統之參數(NSRm 0%) ... 41 表 2. 3 (b) SSI 識別五層樓結構系統之參數(NSRm 5%) ... 41 表 2. 3 (c) SSI 識別五層樓結構系統之參數(NSRm10%) ... 42 表 2. 3 (d) SSI 識別五層樓結構系統之參數(NSRm15%) ... 42 表 3. 1 結構一樓受損之損傷探測分析結果(狀態空間 DLV 法) ... 89 表 3. 2 結構二樓受損之損傷探測分析結果(狀態空間 DLV 法) ... 89 表 3. 3 結構三樓受損之損傷探測分析結果(狀態空間 DLV 法) ... 89 表 3. 4 結構一樓受損之損傷探測分析結果(直接位移法) ... 90 表 3. 5 結構二樓受損之損傷探測分析結果(直接位移法) ... 90 表 3. 6 結構三樓受損之損傷探測分析結果(直接位移法) ... 90 表 3. 7 健康結構之質量識別結果 ... 91 表 4. 1 鋼結構模型之參數 ... 144表 4. 2 (a) 健康結構系統識別之結構參數 (SRIM 系統識別,White Noise, PGA=0.1g,未受損)... 145
表 4. 2 (b) 健康結構系統識別之結構參數 (SSI 系統識別,White Noise, PGA=0.1g,未受損)... 145
表 4. 3 (a) CASE A1 系統識別之結構參數 (SRIM 系統識別,White Noise, PGA=0.1g,一樓受損)... 146
表 4. 3 (b) CASE A1 系統識別之結構參數 (SSI 系統識別,White Noise, PGA=0.1g,一樓受損)... 146
表 4. 4 (a) CASE A2 系統識別之結構參數 (SRIM 系統識別,White Noise, PGA=0.1g,二樓受損)... 147
表 4. 4 (b) CASE A2 系統識別之結構參數 (SSI 系統識別,White Noise, PGA=0.1g,二樓受損)... 147 表 4. 5 (a) CASE A3 系統識別之結構參數 (SRIM 系統識別,White Noise,
x
PGA=0.1g,三樓受損)... 148 表 4. 5 (b) CASE A3 系統識別之結構參數 (SSI 系統識別,White Noise,
PGA=0.1g,三樓受損)... 148 表 4. 6 (a) CASE A4 系統識別之結構參數 (SRIM 系統識別,White Noise,
PGA=0.1g,四樓受損)... 149 表 4. 6 (b) CASE A4 系統識別之結構參數 (SSI 系統識別,White Noise,
PGA=0.1g,四樓受損)... 149 表 4. 7 (a) CASE A5 系統識別之結構參數 (SRIM 系統識別,White Noise,
PGA=0.1g,五樓受損)... 150 表 4. 7 (b) CASE A5 系統識別之結構參數 (SSI 系統識別,White Noise,
PGA=0.1g,五樓受損)... 150 表 4. 8 (a) CASE A13 系統識別之結構參數 (SRIM 系統識別,White Noise,
PGA=0.1g,一樓及三樓受損)... 151 表 4. 8 (b) CASE A13 系統識別之結構參數(SSI 系統識別,White Noise,
PGA=0.1g,一樓及三樓受損)... 151 表 4. 9 (a) CASE A15 系統識別之結構參數(SRIM 系統識別,PGA=0.1g,一樓
及五樓受損) ... 152 表 4. 9 (b) CASE A15 系統識別之結構參數 (SSI 系統識別,PGA=0.1g,一樓
及五樓受損) ... 152 表 4. 10 (a) CASE A135 系統識別之結構參數 (SRIM 系統識別,White Noise,
PGA=0.1g,一樓、三樓及五樓受損)... 153 表 4. 10 (b) CASE A135 系統識別之結構參數 (SSI 系統識別,White Noise,
PGA=0.1g,一樓、三樓及五樓受損)... 153 表 4. 11 結構損傷探測分析之結果 (White Noise,PGA=0.1g) ... 154 表 4. 12 (a) 健康結構系統識別之結構參數(SRIM 系統識別,El Centro,
PGA=0.1g,未受損)... 155 表 4. 12 (b) 健康結構系統識別之結構參數 (SSI 系統識別,El Centro,
PGA=0.1g,未受損)... 155 表 4. 13 (a) CASE B1 系統識別之結構參數 (SRIM 系統識別,El Centro,
PGA=0.1g,一樓受損 ... 156 表 4. 13 (b) CASE B1 系統識別之結構參數 (SSI 系統識別,El Centro,
PGA=0.1g,一樓受損)... 156 表 4. 14 (a) CASE B2 系統識別之結構參數 (SRIM 系統識別,El Centro,
PGA=0.1g,二樓受損)... 157 表 4. 14 (b) CASE B2 系統識別之結構參數 (SSI 系統識別,El Centro,
PGA=0.1g,二樓受損)... 157 表 4. 15 (a) CASE B3 系統識別之結構參數 (SRIM 系統識別,El Centro,
PGA=0.1g,三樓受損)... 158 表 4. 15 (b) CASE B3 系統識別之結構參數 (SSI 系統識別,El Centro,
PGA=0.1g,三樓受損)... 158 表 4. 16 (a) CASE B4 系統識別之結構參數 (SRIM 系統識別,El Centro,
PGA=0.1g,四樓受損)... 159 表 4. 16 (b) CASE B4 系統識別之結構參數 (SSI 系統識別,El Centro,
PGA=0.1g,四樓受損)... 159 表 4. 17 (a) CASE B5 系統識別之結構參數 (SRIM 系統識別,El Centro,
PGA=0.1g,五樓受損)... 160 表 4. 17 (b) CASE B5 系統識別之結構參數 (SSI 系統識別,El Centro,
PGA=0.1g,五樓受損 ... 160 表 4. 18(a) CASE B13 系統識別之結構參數 (SRIM 系統識別,El Centro,
PGA=0.1g,一樓及三樓受損)... 161 表 4. 18 (b) CASE B13 系統識別之結構參數 (SSI 系統識別,El Centro,
PGA=0.1g,一樓及三樓受損)... 161 表 4. 19 (a) CASE B15 系統識別之結構參數 (SRIM 系統識別,El Centro,
PGA=0.1g,一樓及五樓受損)... 162 表 4. 19 (b) CASE B15 系統識別之結構參數 (SSI 系統識別,El Centro,
PGA=0.1g,一樓及五樓受損 ... 162 表 4. 20 (a) CASE B135 系統識別之結構參數 (SRIM 系統識別,El Centro,
PGA=0.1g,一樓、三樓及五樓受損)... 163 表 4. 20 (b) CASE B135 系統識別之結構參數 (SSI 系統識別,El Centro,
PGA=0.1g,一樓、三樓及五樓受損)... 163 表 4. 21 結構損傷探測分析之結果 (El Centro,PGA=0.1g) ... 164 表 4. 22 結構損傷探測分析之結果 ... 165 表 4. 23 CASE C1 結構損傷探測分析之結果(White Noise,1 樓受損,部分觀
測) ... 166 表 4. 24 CASE C2 結構損傷探測分析之結果(White Noise,2 樓受損,部分觀
xii
表 4. 25 CASE C3 結構損傷探測分析之結果 (White Noise,3 樓受損,部分觀 測) ... 168 表 4. 26 CASE C4 結構損傷探測分析之結果 (White Noise,4 樓受損,部分觀
測) ... 169 表 4. 27 CASE C5 結構損傷探測分析之結果 (White Noise,5 樓受損,部分觀
測) ... 170 表 4. 28 CASE C13 結構損傷探測分析之結果 (White Noise,1 樓及 3 樓受損,
部分觀測) ... 171 表 4. 29 CASE C15 結構損傷探測分析之結果 (White Noise,1 樓及 5 樓受損,
部分觀測) ... 172 表 4. 30 CASE C135 結構損傷探測分析之結果 (White Noise,1 樓、3 樓及 5
樓受損,部分觀測) ... 173 表 4. 31 結構損傷探測試驗分析結果歸納表(135 樓觀測) ... 174
圖目錄
圖 2. 1 (a) El Centro 南北向地震加速度歷時圖(PGA=0.1g) ... 43
圖 2. 1 (b) El Centro 南北向地震加速度歷時圖(PGA=0.34g) ... 43 圖 2. 2 (a) 各樓層絕對加速度歷時圖(NSRm 0%) ... 44 圖 2. 2 (b) 各樓層絕對加速度歷時圖(NSRm 5%) ... 45 圖 2. 2 (c) 各樓層絕對加速度歷時圖(NSRm10%) ... 46 圖 2. 2 (d) 各樓層絕對加速度歷時圖(NSRm15%) ... 47 圖 2. 3 SRIM 法於不同噪訊比之模態振形識別結果比較 ... 48
圖 2. 4 White Noise 加速度歷時圖(PGA=0.1g) ... 49
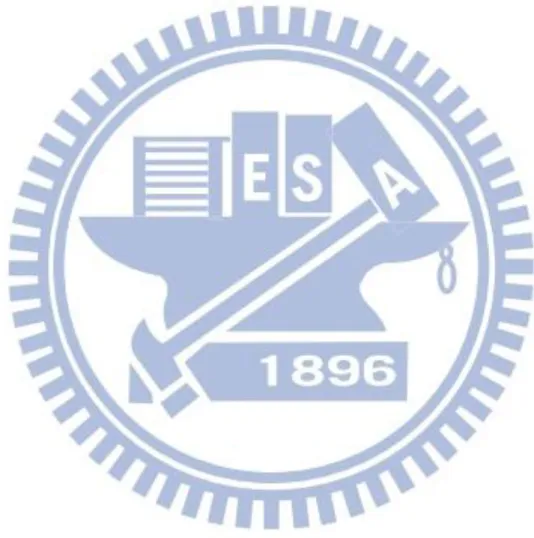
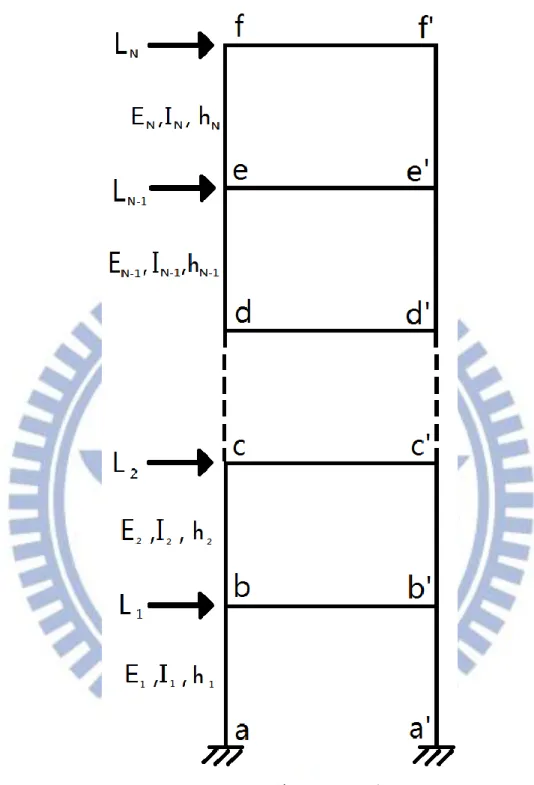
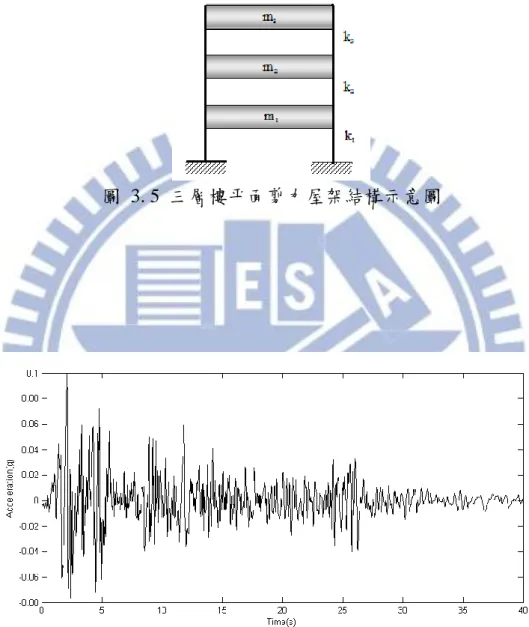
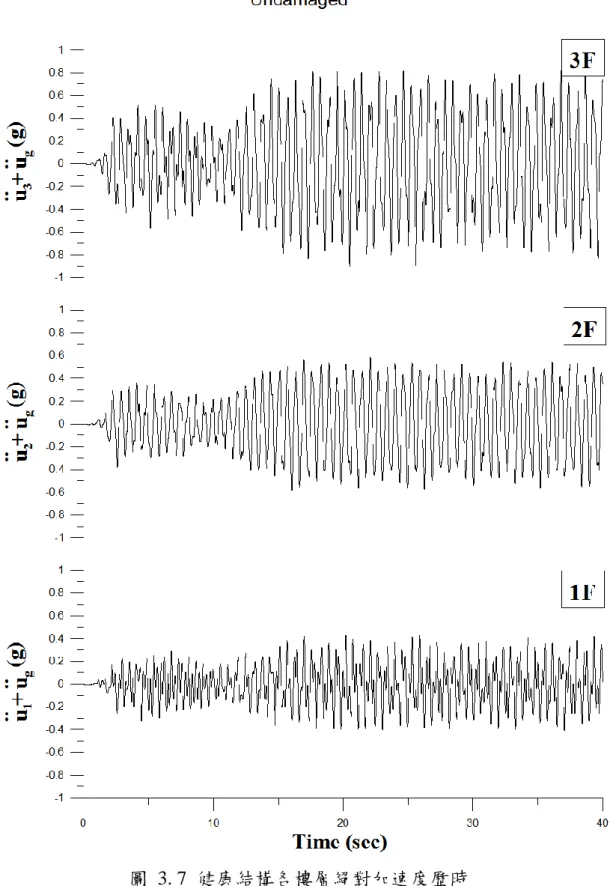
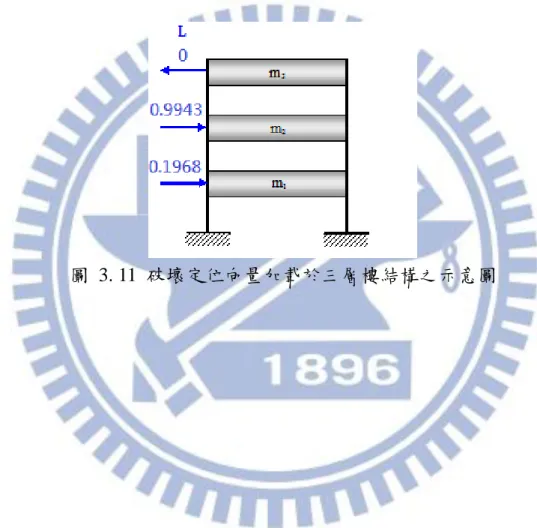
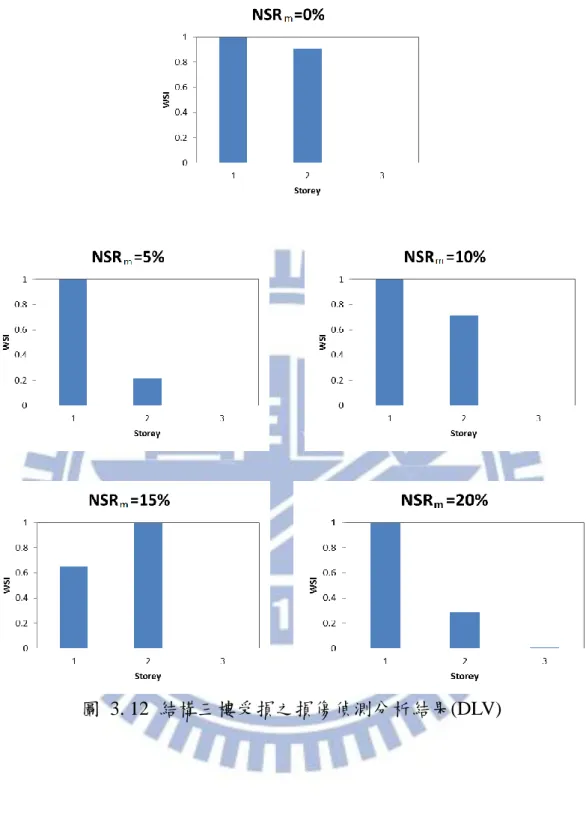
圖 2. 5 (a) 各樓層絕對加速度歷時圖(NSRm 0%) ... 50 圖 2. 5 (b) 各樓層絕對加速度歷時圖(NSRm 5%) ... 51 圖 2. 5 (c) 各樓層絕對加速度歷時圖(NSRm10%) ... 52 圖 2. 5 (d) 各樓層絕對加速度歷時圖(NSRm15%) ... 53 圖 2. 6 SSI 法於不同噪訊比之模態振形識別結果比較 ... 54 圖 3. 1 破壞定位向量與結構示意圖 ... 92 圖 3. 2 DLV 損傷探測分析流程 ... 93 圖 3. 3 N 層樓剪力屋架示意圖 ... 94 圖 3. 4 N 層樓剪力屋架在水平側力作用下之變位示意圖 ... 95 圖 3. 5 三層樓平面剪力屋架結構示意圖 ... 96 圖 3. 6 El Centro 南北向地震加速度歷時圖(PGA=0.1g) ... 96 圖 3. 7 健康結構各樓層絕對加速度歷時 ... 97 圖 3. 8 (a) 三樓破壞之結構各樓層絕對加速度歷時 (NSRm0%) ... 98 圖 3. 8 (b) 三樓破壞之結構各樓層絕對加速度歷時 (NSRm 5%) ... 99 圖 3. 8 (c) 三樓破壞之結構各樓層絕對加速度歷時 (NSRm 10%) ... 100 圖 3. 8 (d) 三樓破壞之結構各樓層絕對加速度歷時 (NSRm 15%) ... 101 圖 3. 8 (e) 三樓破壞之結構各樓層絕對加速度歷時 (NSRm 20%) ... 102 圖 3. 9 (a) 二樓破壞之結構各樓層絕對加速度歷時 (NSRm0%) ... 103 圖 3. 9 (b) 二樓破壞之結構各樓層絕對加速度歷時 (NSRm 5%) ... 104 圖 3. 9 (c) 二樓破壞之結構各樓層絕對加速度歷時 (NSRm 10%) ... 105 圖 3. 9 (d) 二樓破壞之結構各樓層絕對加速度歷時 (NSRm 15%) ... 106 圖 3. 9 (e) 二樓破壞之結構各樓層絕對加速度歷時 (NSRm 20%) ... 107
xiv 圖 3. 10 (a) 一樓破壞之結構各樓層絕對加速度歷時 (NSRm0%) ... 108 圖 3. 10 (b) 一樓破壞之結構各樓層絕對加速度歷時 (NSRm 5%) ... 109 圖 3. 10 (c) 一樓破壞之結構各樓層絕對加速度歷時 (NSRm 10%) ... 110 圖 3. 10 (d) 一樓破壞之結構各樓層絕對加速度歷時 (NSRm 15%) ... 111 圖 3. 10 (e) 一樓破壞之結構各樓層絕對加速度歷時 (NSRm 20%) ... 112 圖 3. 11 破壞定位向量加載於三層樓結構之示意圖 ... 113 圖 3. 12 結構三樓受損之損傷偵測分析結果(DLV) ... 114 圖 3. 13 結構一樓受損之損傷偵測分析結果(DLV) ... 115 圖 3. 14 結構二樓受損之損傷偵測分析結果(DLV) ... 116 圖 3. 15 結構一樓受損之損傷偵測分析結果(直接位移法) ... 117 圖 3. 16 結構二樓受損之損傷偵測分析結果(直接位移法) ... 118 圖 3. 17 直結構三樓受損之損傷偵測分析結果(直接位移法) ... 119 圖 4. 1 地震模擬振動台 ... 175 圖 4. 2 振動台油壓致動器 ... 175 圖 4. 3 MTS 407 控制器 ... 176 圖 4. 4 1:2 縮尺五層樓鋼構結構立面圖 ... 177 圖 4. 5 1:2 縮尺五層樓鋼構結構上視圖 ... 177 圖 4. 6 五層樓鋼結構(未受損) ... 178 圖 4. 7 五層樓鋼結構(二樓受損,移除二樓雙邊斜撐) ... 178 圖 4. 8 健康結構之各樓層加速度歷時(White Noise,PGA=0.1g) ... 179 圖 4. 9 健康結構模態識別結果(White Noise) ... 180
圖 4. 10 CASE A1 各樓層加速度歷時(White Noise,PGA=0.1g,1 樓受損)181 圖 4. 11 CASE A1 模態識別結果(White Noise,1 樓受損)... 182
圖 4. 12 CASE A2 各樓層加速度歷時(White Noise,PGA=0.1g,2 樓受損)183 圖 4. 13 CASE A2 模態識別結果(White Noise,2 樓受損) ... 184
圖 4. 14 CASE A3 各樓層加速度歷時(White Noise,PGA=0.1g,3 樓受損)185 圖 4. 15 CASE A3 模態識別結果(White Noise,3 樓受損) ... 186
圖 4. 16 CASE A4 各樓層加速度歷時(White Noise,PGA=0.1g,4 樓受損)187 圖 4. 17 CASE A4 模態識別結果(White Noise,4 樓受損) ... 188
圖 4. 18 CASE A5 各樓層加速度歷時(White Noise,PGA=0.1g,5 樓受損)189 圖 4. 19 CASE A5 模態識別結果(White Noise,5 樓受損) ... 190
圖 4. 20 CASE A13 各樓層加速度歷時(White Noise,PGA=0.1g,1 樓及 3 樓 受損) ... 191
圖 4. 21 CASE A13 模態識別結果(White Noise,1 樓及 3 樓受損) ... 192
圖 4. 22 CASE A15 各樓層加速度歷時(White Noise,PGA=0.1g,1 樓及 5 樓 受損) ... 193
圖 4. 23 CASE A15 模態識別結果(White Noise,1 樓及 5 樓受損) ... 194
圖 4. 24 CASE A135 各樓層加速度歷時(White Noise,PGA=0.1g,1 樓、3 樓 及 5 樓受損) ... 195
圖 4. 25 CASE A135 模態識別結果(White Noise,1 樓、3 樓及 5 樓受損) .. 196
圖 4. 26 CASE A1 結構損傷探測分析結果(White Noise,一樓受損) ... 197
圖 4. 27 CASE A2 結構損傷探測分析結果(White Noise,二樓受損) ... 198
圖 4. 28 CASE A3 結構損傷探測分析結果(White Noise,三樓受損) ... 199
圖 4. 29 CASE A4 結構損傷探測分析結果(White Noise,四樓受損) ... 200
圖 4. 30 CASE A5 結構損傷探測分析結果(White Noise,五樓受損) ... 201
圖 4. 31 CASE A13 結構損傷探測分析結果(White Noise,一樓及三樓受損) ... 202
圖 4. 32 CASE A15 結構損傷探測分析結果(White Noise,一樓及五樓受損) ... 203
圖 4. 33 CASE A135 結構損傷探測分析結果(White Noise,一樓、三樓及五樓 受損) ... 204
圖 4. 34 健康結構之各樓層加速度歷時(El Centro,PGA=0.1g) ... 205
圖 4. 35 健康結構之模態識別結果(El Centro) ... 206
圖 4. 36 CASE B1 各樓層加速度歷時(El Centro,PGA=0.1g,一樓受損) ... 207
圖 4. 37 CASE B1 模態識別結果(El Centro,1 樓受損) ... 208
圖 4. 38 CASE B2 各樓層加速度歷時(El Centro,PGA=0.1g,2 樓受損) .... 209
圖 4. 39 CASE B2 模態識別結果(El Centro,2 樓受損) ... 210
圖 4. 40 CASE B3 各樓層加速度歷時(El Centro,PGA=0.1g,3 樓受損) .... 211
圖 4. 41 CASE B3 模態識別結果(El Centro,3 樓受損) ... 212
圖 4. 42 CASE B4 各樓層加速度歷時(El Centro,PGA=0.1g,4 樓受損) .... 213
圖 4. 43 CASE B4 模態識別結果(El Centro,4 樓受損) ... 214
圖 4. 44 CASE B5 各樓層加速度歷時(El Centro,PGA=0.1g,5 樓受損) .... 215
圖 4. 45 CASE B5 模態識別結果(El Centro,5 樓受損) ... 216
圖 4. 46 CASE B13 各樓層加速度歷時(El Centro,PGA=0.1g,1 樓及 3 樓受損) ... 217
xvi
圖 4. 48 CASE B15 各樓層加速度歷時(El Centro,PGA=0.1g,1 樓及 5 樓受損)
... 219
圖 4. 49 CASE B15 模態識別結果(El Centro,1 樓及 5 樓受損) ... 220
圖 4. 50 CASE B135 各樓層加速度歷時(El Centro,PGA=0.1g,1 樓、3 樓及 5 樓受損) ... 221
圖 4. 51 CASE B135 模態識別結果(El Centro,1 樓、3 樓及 5 樓受損) ... 222
圖 4. 52 CASE B1 結構損傷探測分析結果(El Centro,一樓受損) ... 223
圖 4. 53 CASE B2 結構損傷探測分析結果(El Centro,二樓受損) ... 224
圖 4. 54 CASE B3 結構損傷探測分析結果(El Centro,三樓受損) ... 225
圖 4. 55 CASE B4 結構損傷探測分析結果(El Centro,四樓受損) ... 226
圖 4. 56 CASE B5 結構損傷探測分析結果(El Centro,五樓受損) ... 227
圖 4. 57 CASE B13 結構損傷探測分析結果(El Centro,一樓及三樓受損) ... 228
圖 4. 58 CASE B15 結構損傷探測分析結果(El Centro,一樓及五樓受損) ... 229
圖 4. 59 CASE B135 結構損傷探測分析結果(El Centro,一樓、三樓及五樓受 損) ... 230 圖 4. 60 CASE C1 結構損傷探測分析結果(輸入數量:1,輸出數量:4) .... 231 圖 4. 61 CASE C1 結構損傷探測分析結果(輸入數量:1,輸出數量:3) .... 232 圖 4. 62 CASE C2 結構損傷探測分析結果(輸入數量:1,輸出數量:4) .... 233 圖 4. 63 CASE C2 結構損傷探測分析結果(輸入數量:1,輸出數量:3) .... 234 圖 4. 64 CASE C3 結構損傷探測分析結果(輸入數量:1,輸出數量:4) .... 235 圖 4. 65 CASE C3 結構損傷探測分析結果(輸入數量:1,輸出數量:3) .... 236 圖 4. 66 CASE C4 結構損傷探測分析結果(輸入數量:1,輸出數量:4) .... 237 圖 4. 67 CASE C4 結構損傷探測分析結果(輸入數量:1,輸出數量:3) .... 238 圖 4. 68 CASE C5 結構損傷探測分析結果(輸入數量:1,輸出數量:4) .... 239 圖 4. 69 CASE C5 結構損傷探測分析結果(輸入數量:1,輸出數量:3) .... 240 圖 4. 70 CASE C13 結構損傷探測分析結果(輸入數量:1,輸出數量:4) .. 241 圖 4. 71 CASE C13 結構損傷探測分析結果(輸入數量:1,輸出數量:3) .. 242 圖 4. 72 CASE C15 結構損傷探測分析結果(輸入數量:1,輸出數量:4) .. 243 圖 4. 73 CASE C15 結構損傷探測分析結果(輸入數量:1,輸出數量:3) .. 244 圖 4. 74 CASE C135 結構損傷探測分析結果(輸入數量:1,輸出數量:4) 245 圖 4. 75 El Centro(PGA=0.1g)原始輸入擾動訊號與其頻譜 ... 246 圖 4. 76 El Centro(PGA=0.1g)振動台量測之訊號與其頻譜 ... 246 圖 4. 77 White Noise(PGA=0.1g)原始輸入擾動訊號與其頻譜 ... 247
1
第一章 緒論
1.1 研究動機與目的
近年來全球強震頻傳,震害之嚴重程度不斷上修。台灣位於歐亞大陸 板塊和菲律賓海板塊的交界處,屬環太平洋火山地震帶,每年地震的發生 數以百計。因地震頻繁,國內建築物的震害風險亦相對較高。如何於震後 快速有效且準確偵測建築物是否受損,進而定位出受損位置以利後續之修 復與補強,維持結構之健康狀態,乃結構工程之重要課題。結構健康診斷(Structural Health Monitoring, SHM)為近年來土木工程
領域中極受重視的研究課題之ㄧ【1~5】。結構健康診斷技術最早出現在航 太工程與機械工程的研究領域中,其研究熱潮始於 1980 年代中期,肇因 於航太工程、轉動機械設備、外海鑽油平台及土木基礎建設(如橋梁結構) 等四大領域之迫切需求【6】。結構健康診斷的概念其實和人體健康檢查的 想法類似。一棟建築物的各部位有可能因外來或內在因素而老化或受損, 吾人可藉由裝設在建築物中的儀器監測其地震反應,透過分析探知結構物 哪個部位受損,並及時針對該損害部位進行補強。 結構損傷探測方法多由力學及動力分析理論發展而來,其宗旨乃在不 破壞材料及構件的前提下,對破壞位置及損傷程度進行有效的識別。結構 損傷探測系統須以成熟的動態試驗、動態監測、系統識別及損傷探測等技 術【7】,配合適當之健康診斷指標作為評估依據方能克竟其功。 在動態試驗方面,因建築結構規模龐大,人為敲擊或激振測試因輸入 的能量有限,鮮能有效激發結構主要模態之反應。地震是大自然提供結構 動態反應最有效的足尺試驗,所提供的擾動能量遠超過任何人為測試方法, 足以將結構動態行為激發出來,乃結構系統識別分析最可靠的資料來源。 台灣因地震頻繁,因此有條件以震測資料為分析基礎,發展適當的結構損 傷探測技術;在動態監測方面,由於加速度的量測不需參考點,且加速規
體積小、質量輕、成本低,因此比位移及速度等物理量更適合作為監測對 象;在系統識別方面,應儘可能選擇所需資料最少、直接應用量測訊號(不 必再經數值微分或積分等加工),且具強健性(Robustness)的方法;在損 傷探測方面,則須選擇對結構的損傷有高度敏感性,不需仰賴高頻模態資 訊(因不易被激發),且能由全域反應(Global Responses)定位出局部破 壞(Local Damages)的方法。本研究將整合能夠滿足前述要件之方法,發 展具備嚴謹之理論基礎與實用價值之結構損傷探測技術。 隨著結構健康診斷技術的發展,對於感應器之軟硬體性能要求也越來 越高。傳統之有線感應器受限於環境因素,不利於大規模結構之動態反應 監測,無線監測系統之應用乃實現結構健康監測技術之必然發展趨勢,智 慧型無線感應器的技術發展也應運而生。本研究規劃一系列的振動台試驗, 針對一座單跨五層樓鋼結構模型進行地震模擬試驗,藉由拆除部分斜撐以 模擬樓層之損傷狀況,並採用無線監測與傳輸系統蒐集結構動態反應歷時 資料進行結構損傷探測分析,以了解未來無線監測(Wireless Sensing)於結 構健康監測實務之應用潛力。 除地震之外,作用於結構物之風力、環境雜訊與結構內部人為活動均為結 構振動反應之擾動來源,惟這些擾動未必能夠被具體定義或量測。因而在 此情況下,為進行結構系統識別,必須採用適用於唯輸出系統(Output-Only System)之識別方法。本研究將探討兩種不同之系統識別法,分別包括信
息矩陣系統識別理論 (System Realization using Information Matrix, SRIM) 與隨機子空間運算法(Stochastic Subspace Identification, SSI),並將利用其識 別所得之參數,配合結構損傷探測分析方法,發展具實務應用價值的土木 結構損傷探測技術。
3
1.2 文獻回顧
欲成功實行結構健康診斷分析,必須仰賴可靠的系統識別方法。系統 識別分析乃利用已知之輸入(Input)及輸出(Output)訊號之關係推估出 足以忠實反映結構系統之特性參數,進而建立更具代表真實結構系統之物 理模型。系統識別技術之發展,一直以來即為國內外學術及工程界所重視 的 研 究 課 題 。 系 統 識 別 方 法 通 常 可 區 分 為 參 數 識 別 法 ( Parameter Identification)與非參數識別法(Non-Parameter Identification)兩大類。參 數識別法【8,9】係指直接以具有物理意義之系統參數(如質量、勁度及阻 尼係數等)為識別對象,又包括時域與頻域分析法。非參數識別則不以前 述之物理參數為直接識別之目標,而由系統輸出與輸入資料之遞迴時序關 係或訊息矩陣建立數學模型,從而識別出最佳擬合之系統參數,如回歸係 數(ARX);或系統矩陣、狀態輸出影響矩陣及輸入影響矩陣等狀態系統 參數(SRIM);或利用量測資料間之協方差關係於唯輸出系統之參數識別 (SSI),再由這些資訊進一步萃取出系統之物理參數,繼而計算出模態參 數(如頻率、阻尼比及模態)。 模態分析(Modal Analysis)於 1970 年代首先應用於航太與機械領域 【10,11】,主要是針對設備故障進行診斷。隨著訊號處理技術的進步,1980 年代末期,模態分析已成為土木工程處理振動控制與結構健康監測之重要 工具。Juang 和 Pappa【12】發展出特徵系統識別演算法(Eigensystem Realization Algorithm, ERA),將系統以最小階數之等效系統近似,並應用 到模態參之數識別上。Ewins【13】提出以結構動力學結合動態特徵試驗 之系統識別分析技術。模態分析根據試驗條件與識別程序之不同可分為三大類,包括:解析 模態分析(Analytical Modal Analysis, AMA)、試驗模態分析(Experimental Modal Analysis, EMA)與運轉模態分析(Operational Modal Analysis, OMA)。
解析模態分析,即利用已知或假設之參數建立結構模型,給定輸入條件得 到輸出,此類運算過程稱為正運算問題(Forward Problem)。然而真實結 構系統模型難以事先精確建立,因此解析模態分析在實務上並不可行。 試驗模態分析主要針對模態模型無法確切定量之情況,藉由外力擾動 (Excitation)與反應(Response)之關係重建結構系統模型,並進一步識 別模態參數,這一類的問題稱為逆運算問題(Inverse Problem)。試驗模態 分析之模態參數識別法目前已有豐碩之研究成果。首先,Ho 與 Kalman【14】 以脈衝反應函數(Impulse Response Function)性質推算出狀態空間模式, 為確定性系統識別(Deterministic Realization)理論之起源。Zeiger 等人【15】 與 Kung【16】提出以奇異值分解(Singular Value Decomposition)萃取出 系統參數的方法,並與上述方法結合,以達到分離噪訊之目的。1988 年, Juang、Cooper 與 Wright【17】提出 ERA 之修正方法,結合資料相關性之
特徵系統識別演算法(Eigensystem Realization Algorithm Using Correlation, ERA/DC),在 ERA 的理論架構下,利用資料相關性(Data Correlation)降 低噪訊對於模態參數識別之影響,從而提高識別結果的精準度。接著,又 結合觀測器/卡氏濾波器識別法(Observer/Kalman Filter Identification, OKID) 【18】,利用脈衝反應建立建構資料相關性矩陣以降低噪訊,其中脈衝反 應係藉由 OKID 獲得。為考慮計算時間與精確性,Juang【19】於 1997 年 提出信息矩陣之系統辨識理論(System Realization using Information Matrix,
SRIM),由輸出與輸入資料間的協方差矩陣,以奇異值分解萃取出系統之 狀態空間參數。換言之,SRIM 可直接利用輸入-輸出資料求得模態參數, 可省去 ERA/DC 需計算脈衝反應之步驟,並可針對多重輸入-多重輸出 (MIMO)之系統進行分析,適用於複雜的結構模型(如多自由度、扭轉 耦合結構…等)。國內學者已成功將其應用於土木結構之系統識別,例如 簡劭純【20】以六層樓對稱鋼結構及三層樓不對稱鋼結構(扭轉耦合結構)
5 呂明威【21】以中興大學土木環工大樓(扭轉耦合結構)之實測結構地震 反應紀錄,應用 SRIM 識別方法識別其模態參數,並以層間勁度折減比例 作為損壞評估指標。 在現實中,真正的結構輸入外力往往難以得知,試驗模態分析之適用 性仍有其侷限性。外力擾動若不可測得,結構輸出反應則為識別模態參數 唯一的資訊,因此唯輸出反應之系統識別方法漸漸受到重視。從 1990 年 開始,有關自然擾動(Natural-Excitation)、微振(Ambient)、與唯輸出模 態分析(Output-Only Modal Analysis)等方法皆歸類為運轉模態分析。與 試驗模態分析比較,運轉模態分析之實施快速、不需振動器,且可進一步 實現長時間連續結構健康監測與即時評估損壞之目標。其缺點在於輸入條 件必須為白噪訊(White Noise),否則會影響其識別結果之精確性。雖然 如此,運轉模態分析依然可以有效識別出系統模態參數,因此已被廣泛應 用於車輛道路檢驗、航空機件測試【22】與橋樑健康監測【23】。 運轉模態分析依訊號內涵之不同,可分為頻域法與時域法。在頻域法 中,較被廣泛討論的有尖峰選取法(Peak-Picking Method)和頻域分解法 (Frequency-Domain Decomposition,簡稱 FFD)【24】;尖峰選取法將結構 輸出反應訊號轉換為功率頻譜(Power Spectrum),假設頻譜上之尖峰值所 對應之頻率即為結構系統之特徵值,再利用半功率頻帶法(Half-Power Bandwidth)計算阻尼比,由尖峰大小求出振態,此方法為最簡單之系統識 別法。惟此一方法僅適用於結構阻尼比較小,且各模態完整分離之條件。 頻域分解法同樣是針對頻譜中之尖峰頻率進行處理。相較於尖峰選取法, 頻域分解法之優點在於應用了奇異值分解,將該頻譜尖峰有貢獻之特徵值 分離,並由奇異值矩陣中對角線非零項之個數決定組成模態的數量。 時域法中較具代表性的有亞伯拉罕時域分析法(Ibrahim Time Domain
Method)【25~27】搭配隨機遞減法(Random Decrement Method)【28】與 隨機子空間識別理論(Stochastic Subspace Identification;簡稱 SSI)【29~31】。
隨機遞減法最早由 Cole【28】提出,係利用平均的觀念將外力去除並萃取 出隨機遞減訊號(Random Decrement Signature),能降低外力干擾,展現 系統特性,以取得結構自由振動反應;Ibrahim【25~27】提出一套利用結 構物自由振動衰減反應識別出其自然頻率、阻尼比與模態之演算法,稱為 亞伯拉罕時域分析法。1977 年,Ibrahim【26】首次利用隨機遞減法萃取出 隨機遞減訊號後,利用亞伯拉罕時域分析法進行系統之參數識別。
1991 年,Van Overschee【31】首次提出隨機子空間識別理論(Stochastic
Subspace Identification;簡稱 SSI),對於各種時域性之運轉模態分析,以 SSI 為基礎推導之理論,其系統識別結果皆優於其他時域性唯輸出系統識別法。 子空間(Subspace)在數學中定義為維度小於全(向量)空間的子集合, 在此可解讀為從量測資料組成之向量空間中分離出觀測矩陣、控制矩陣與 噪訊矩陣等子空間,以取得系統之參數,進而求得模態參數。 以隨機子空間識別理論為基礎之時域系統識別法又可分為資料型與 協方差型。1993 年,資料型分析法由 Van Overschee【32】首次提出,Peeters 於 1995 年第一次將此方法應用於土木工程結構之模態分析【33】。協方差 法則於 2000 年首次出現於 Peeters 的博士論文中【30】。前述兩種方法都需 符合基本假設—外力輸入條件必須為零均(Zero-Mean)之白噪訊隨過程, 且不同時間點之相關性為零。此外,為達到統計穩定性,亦需滿足資料筆 數N,但在實際情況不可能達到此目標。因此,近年來有許多學者陸 續發表改善方法與應用【34~37】,其中 Hong【36】於 2010 年發表的博士 論文探討了三種較有效之改善方法,包括局部最小平方法(Partial Least Squares,PLS)、多元迴歸分析法(Multiple Linear Regression,MLR)及
典型相關分析法(Canonical Correlation Analysis,CCA),並針對 CCA 法 對於非高斯雜訊(Non-Gaussian Noise)誤差傳播的問題加以改善,提出改良 典型相關分析法(Enhanced Canonical Correlation Analysis,ECCA),並應
7 梁之系統識別【37】,取得相當好之分析結果。本研究將比較協方差 SSI 與 SRIM 系統識別法,並以實用性較高的加速度訊號進行系統識別,同時 以模態參數(自然頻率、阻尼比及模態振型)之識別結果作為兩方法之比 較依據。 結構損傷探測通常係藉由評估系統破壞前、後參數之變化 (如自然 頻率、模態或勁度矩陣、柔度矩陣等),作為結構損傷的判斷依據。Ewins 【38】根據結構動力學的基本觀念,發展動態試驗及系統識別等技術,並 定義多項指標,將動態試驗識別分析所得的模態參數轉換為工程分析的參 考依據。Salawu【39】則藉由動態監測反應萃取系統頻率,並由其變化來 判斷結構系統是否受損。羅振剛【40】應用希伯特-黃轉換邊際譜作為結構 損壞之判斷方法,藉由比對結構損壞前後 HHT 邊際譜之相對變化判斷出 損傷位置,並以剪力屋架結構驗證其可行性。 一般認為,結構之勁度矩陣是與結構受損最直接相關的物理參數,但 以勁度矩陣為基礎之結構損傷探測方法,都須先建立未受損結構的精確解 析模型(Analytical Model)以資比較。就實務面而言,建立精確的結構解 析模型本身就難以達成;此外,結構勁度矩陣的組成中,高頻模態的貢獻 度相當大,然而高頻反應卻不易由量測之振動反應中萃取出來,間接影響 了勁度矩陣識別結果之精確性。相對來說,柔度矩陣主要係由低頻模態所 貢獻,對於結構高階模態較不敏感,因而較容易識別出來,因此,以柔度 矩陣為基礎的結構損傷探測方法更具發展潛力。Hoyos 和 Aktan【41】提 出以結構自然頻率及模態建立模態柔度(Modal Flexibilities),奠定以柔度 矩陣作為結構損傷探測之基礎。Pandey 和 Biswas【42,43】利用結構破壞 前與破壞後的柔度矩陣變化,成功的應用在 I 型梁與平面桁架之損傷探測, 開啟了以柔度矩陣為基礎之結構損傷探測方法研究熱潮。Zhao 與 DeWolf 【44】以多自由度彈簧質塊系統進行損傷偵測分析,提出柔度矩陣對於結 構之破壞較自然頻率或模態敏感,更適合作為損傷探測之物理參數。
Bernal【45】於 2002 年提出以結構柔度矩陣之變化為基礎的破壞定位
向量法(Method of Damage Locating Vectors;簡稱 DLV 法),其主要概 念係要識別出結構在某些特定形式的載重向量作用下,應力(或內力)為 零的構件(或樓層)—即潛在的受損構件(或樓層)。凡符合這些特定形式的載 重向量,即稱之為破壞定位向量,這剛好是數學上對應於結構受損前、後 的柔度變異矩陣(Flexibility Differential)零空間(Null Space)的一組向
量基底(Basis),可藉由柔度變異矩陣之奇異值分解求得。將 DLV 作為荷 載施加於破壞前的結構上,再由其應力(或內力)分析結果萃取出最可能 的破壞構件,作為結構損傷探測之依據。Bernal 將此方法成功應用於平面 桁架結構【45】及平板的損壞偵測上【46】, DLV 法自此成為結構損傷探 測研究之主流。 Duan 等人【47】分別針對多自由度彈簧質塊系統及平面桁架結構以 DLV 損傷探測法進行破壞診斷分析,並探討模態數之多寡對識別分析結果 的影響。該研究指出,當結構系統有兩處破壞時,考慮前二、三模態(低 頻模態)即可正確偵測出破壞位置。涂哲維【48】將 DLV 法應用於抗彎 構架系統之損傷探測上,由一系列的數值模擬分析及振動台試驗驗證此方 法在抗彎構架系統之可行性。陳逸軒【7】探討 DLV 法在不足觀測的條件 下,結合 ARX 系統識別方法,藉由模態向量間之正交特性重建出結構柔 度矩陣,並以數值範例及振動台試驗進行驗證。惟上述研究在建立結構柔 度矩陣時,須自行估計系統之質量矩陣,易衍生誤差,且由 ARX 識別出 來的傳遞矩陣所建立之各模態向量正交性不佳,因此也影響 DLV 損傷探 測結果之精確性。為克服前述問題,Bernal 於 2006 年改良其 DLV 法【49】, 提出於狀態空間(State-Space)模型中建立柔度矩陣,並以此為基礎發展 出新的結構損傷探測方法,本文稱之為狀態空間 DLV 法,可由識別得到 之等效系統參數直接進行損傷探測分析,有助於減少建立柔度矩陣過程中,
9 因為質量矩陣及模態向量不準確所造成之誤差,使其更具實務應用價值。 謝柏翰【50】提出以 SRIM 系統識別分析結合狀態空間 DLV 法,探討三維 扭轉耦合結構在單一樓層與複數樓層中單根或多根柱桿件受損之分析,可 由結構之全域反應(樓層加速度反應歷時)偵測出受損桿件,甚至多重受 損的情況。王智洋【51】以平面結構為分析對象,經由數值模擬與振動台 地震模擬試驗分析,充分驗證 SRIM 結合狀態空間 DLV 損傷探測法可由結 構之全域反應(樓層絕對加速度)定位出多層樓平面結構之局部受損,且 無論是單一或複數樓層受損皆可精確定位出破壞樓層。吳柏霖【52】針對 扭轉耦合結構以 DLV 損傷探測法結合 SRIM 系統識別分析進行進行數值模 擬以及振動台試驗,其結果顯示,位形空間 DLV 法之偵測能力不佳;狀 態空間 DLV 法則有較佳之識別率,更具實際應用之潛力。 其實,以 DLV 為基礎的破壞偵測方法並非完全不需結構之解析模型, 除非是剪力屋架,因結構桿件之應力(或內力)仍須根據結構模型去計算。 惟若能由系統識別中直接找出結構之柔度矩陣,則能直接將柔度矩陣乘上 破壞定位向量,得到結構各自由度之位移,從而找出結構破壞位置。Bernal 與 Gunes【53】於 2004 年提出由線性系統之共軛複數模態求取比例柔度矩 陣(Flexibility Proportional Matrices);Lus 等人【54,55】於 2001 發展出一 套利用二階模型【56】求得正規化特徵矩陣,再由正規化特徵矩陣求得柔 度矩陣的方法。唯上述方法無法應用於單一輸入-多重輸出(Single-Input Multi-Output,簡稱 SIMO)之系統,因 MIMO 系統之輸入影響矩陣為秩缺
(Rank Deficient)。為解決此問題,本研究提出一新方法-直接位移法 (Direct Displacement Method),先由各模態間之正交性關係找出比例質量 矩陣【57】,再由比例質量矩陣萃取出正規化比例特徵矩陣,繼而利用正 規化比例特徵矩陣求出比例柔度矩陣。將求得之比例柔度矩陣乘上破壞定 位向量,可得到各樓層之 比例位移(相對於基礎),並由傾角變位法
(Slope-Deflection Method)推導可知,受損樓層之層間位移為零者即相當 於該樓層之應力為零,可作為定吾人定位出受損樓層之判斷依據。 本研究將發展在確定性(Deterministic)及隨機預測(Stochastic)狀 態空間系統架構之下,確定性系統與唯輸出結構之系統識別與損傷探測方 法。針對確定性系統,本文採用 SRIM 法進行系統識別;唯輸出結構之系 統識別分析則採用 SSI 法。接著,再結合狀態空間 DLV 法與本文所提出之 直接位移指標(Direct Displacement Index)進行結構之損傷探測分析。
傳統之有線感應器受限於環境因素,不利於大規模結構之動態反應監 測,無線監測系統之應用乃實現結構健康監測技術之必然發展趨勢,智慧 型無線感應器的技術發展也應運而生。智慧型無線感應器係由多個子系統 整合而成,其中包括感應端、計算核心及無線通訊介面等。Straser 及 Kiremidjian【58】於 1998 年發展了結合微控制器器(Micro-Controller)及
無線電技術的無線組合式監測系統(Wireless Modular Monitoring System, 簡稱 WiMMS)。Wang 等人【59】於 2007 年設計了更完善之 WiMMS,於 硬體及軟體上皆有改進,且可同時執行多項功能(包括處理、轉換訊號及 同時進行取樣)。盧恭君【60】以 Wang 等人之技術為基礎,發展了新的無 線感測單元 NTU-WSU,並將這套智慧型感測系統於實例上應用至集鹿橋 及牛鬥橋之野外結構微振動反應量測,取得良好之結果。本研究將採用盧 恭君【61】發展之 NTU-WSU 無線監測與傳輸系統蒐集結構動態反應歷時 資料,在以地震歷時或 White Noise 為輸入擾動下,結合系統識別方法進 行結構損傷探測分析,以了解未來無線監測(Wireless Sensing)於結構健 康監測實務之應用潛力。
11
1.3 論文架構
本論文共分為六章,各章內容如下所述:第一章為緒論,介紹研究動 機與目的、文獻回顧及論文架構。第二章將介紹 SSI 與 SRIM 識別法,介 紹如何以這兩種方法求得結構動力系統之離散時間架構下的系統矩陣與 狀態輸出矩陣,進而萃取出系統之頻率、阻尼比與模態等參數的方法與驗 證。第三章將介紹狀態空間 DLV 損傷識別法與本研究提出之直接位移法 之原理與數值模擬分析。第四章以振動台試驗驗證 SSI 系統識別法與 SRIM 識別法結合狀態空間 DLV 損傷探測法與直接位移法於實際應用之可行性, 考慮結構不同破壞之型式,亦針對結構多重破壞以及觀測不足的條件下作 分析。第五章為結論與建議。13
第二章 結構系統識別分析理論
2.1 前言
Juang【19】於 1997 年提出信息矩陣之系統辨識理論(System Realization using Information Matrix;簡稱 SRIM)。此一方法係利用資料之相關性(Data
Correlation),由輸出與輸入資料在離散時間狀態空間模型之架構下,以可
觀測矩陣(Observability Matrix)與 Toeplitz 矩陣利用奇異值分解(Singular Value Decomposition)萃取出系統之狀態空間參數,進而推算系統之模態
參數,並用於後續之結構損傷探測分析。
Van Overschee 於 1991 年首次提出隨機子空間識別理論(Stochastic
Subspace Identification;簡稱 SSI)【31】,為目前各種唯輸出(Output-only) 系統識別法之基礎。Peeters 於 2000 年提出利用量測資料間之協方差關係 於唯輸出系統之參數識別【30】,其主要概念係假設輸入擾動為穩態白噪 訊(White Noise),利用量測資料間之協方差(Covariance)取得輸出向量 之協方差矩陣(Output Covariance Matrix),接著將協方差矩陣組成 Toeplitz 矩陣,進而推算系統之模態參數。子空間(Subspace)在數學中定義為維 度小於全(向量)空間的子集合,在系統識別分析中可解讀為從量測資料 組成之矩陣空間中分離出主要成分(Principal Components),從而萃取出系 統之參數矩陣(如觀測矩陣與控制矩陣),再由參數矩陣中得到系統矩陣, 進而求得各項模態參數。 本章將回顧前述兩種識別方法(SRIM 及 SSI)之理論說明,以及如何 以這兩種方法求得結構動力系統之離散時間架構下的系統矩陣與狀態輸 出矩陣,進而萃取出系統之頻率、阻尼比與模態等參數。本章最後將以數 值範例針對一棟五層樓剪力屋架結構系統之動態反應,分別利用 SRIM 與 SSI 法進行系統識別,並探討不同雜訊干擾程度對於識別結果之影響。
2.2 狀態空間模型
系統識別分析理論係建立於狀態空間之架構上,因此本節首先建立連 續時間域之狀態空間系統與離散時間域之狀態空間系統,並說明狀態空間 系統之隨機過程其基本假設。2.2.1
連續時間狀態空間方程式
考慮一 n 自由度結構系統在外力擾動下之位形空間運動方程式,如下: Mx(t)Ξx(t)Kx(t)Eu(t) (2.1) 其中,M、Ξ 及 K 分別為 n n R 之質量、阻尼及勁度矩陣;x(t)、x(t)與x(t) 分別為 n1 R 之結構加速度、速度與位移向量; 1 ) ( r R t u 為輸入擾動向量, r 為輸入擾動之個數;ERnr為外力配置矩陣,其矩陣元素取決於輸入擾 動之型式與分佈。 將式(2.1)以一階矩陣微分方程式表示如下: ) ( ) ( ) ( ) ( ) ( ) ( 1 1 1 t t t t t t u E M 0 x x Ξ M K M I 0 x x z (2.2) 茲定義狀態向量 ) ( ) ( ) ( t t t x x z (2.3) 則式(2.2)可改寫成: 15 其中, Ξ M K M I 0 Ac 1 1 , E M 0 Bc 1 (2.5) 1 2 ) (t R n z 為連續時間之狀態向量; c R n n 2 2 A 為連續時間之系統矩陣; r n c R 2 B 為連續時間之輸入影響矩陣。 若系統之動態反應(如位移計、速度計、加速規等),各由 m 組感應 器量測而得,則輸出向量y(t)可由位移向量x(t)、速度向量x(t)與加速度 向量x(t)如下【61】: y(t)CD x(t)CV x(t)CA x(t) (2.6) 其中,CD、CV與CA分別為Rmn之位移、速度與加速度輸出影響矩陣。由 式(2.1)求解出x(t),並代入式(2.6)可得:
( ) ) ( ) ( ) ( 1 1 1 t t t t D A V A CAM Eu x x Ξ M C C K M C C y (2.7) 或 y(t)Cz(t)Du(t) (2.8) 其中, [ 1 1Ξ] M C C K M C C C D A V A ,DC M1E A (2.9)1 ) ( m R t y 為輸出向量;CRm2n為狀態輸出影響矩陣;DRmr為直接傳 輸矩陣。
2.2.2
離散時間狀態空間系統
由於實際量測之資料為離散型式,故應用上以離散時間系統更為直接。 令k kt( t 為取樣週期),則離散時間域之狀態空間系統可表示成: z(k1)Az(k)Bu(k) (2.10) y(k)Cz(k)Du(k) (2.11) 其中, 2 1 ) ( n R kz 為離散時間之狀態向量(Discrete-Time State Vector); 1 ) (k Rr u 為輸入擾動向量;y(k)Rm1為輸出向量(Output Vector); n n R22
A 為離散時間之系統矩陣(Discrete-time State Matrix);BR2nr為
離散時間之輸入影響矩陣(Discrete-time Input Influence Matrix); m n R 2
C
為離散時間之輸出影響矩陣(Discrete-time Output Influence Matrix); r
m
R
D 為直接傳導矩陣(Direct Transmission Matrix)。若取樣頻率高於最
大等效自然頻率之兩倍,則連續時間系統矩陣與離散時間系統之矩陣可相 互轉換如下【62】: AeAct, t c ) ln(A A (2.12a) 此外,離散時間之輸入影響矩陣亦可由連續時間系統矩陣與連續時間之輸 入影響矩陣表示: B Ac (A I)Bc 1 ,Bc A I 1AcB ) ( (2.12b)
17
2.2.3
狀態空間系統之隨機過程
在 2.2.1 節和 2.2.2 節所考慮之動態系統中的結構輸入擾動向量為確定 的(Deterministic),但事實上,結構之部分擾動源可能是不確定且無法確 切量測的,故輸入擾動向量函數未必能完全得知。因此,離散時間狀態空 間系統在未知擾動之輸入條件下應改寫為【28】: z(k1)Az(k)Bu(k)w(k) (2.13) y(k)Cz(k)Du(k)v(k) (2.14) 其中, 2m1 R ) k ( z 為第 k 瞬時之離散時間狀態向量; u(k)Rr1為第 k 瞬時之離散時間外力輸入向量; y(k)Rm1為第 k 瞬時之離散時間輸出觀測量; 1 2 ) (k R nw 為第 k 瞬時之過程噪訊向量(Process Noise Vector);
1
) (k Rm
v 為第 k 瞬時之量測噪訊向量(Measurement Noise Vector);
t 2n 2n R e Ac A 為離散時間系統矩陣; BAc1(AI)BcR2nr為離散時間輸入影響矩陣。 ) k ( w 與v(k)為未知,在此吾人假設其為零均值(Zero-mean)之穩態隨機 訊號,亦即高斯白噪訊(Gaussian White Noise)。w(k)與v(k)之協方差矩 陣(Covariance Matrices)可表示成:
) ( ) ( ) ( ) ( ) k ( ) k ( ) k ( ) k ( E T T T vv wv wv ww R R R R v w v w (2.15) 其中,
T
2n 2n N 1 k T N N (k ) (k) E (k ) (k) R 1 lim ) (
w w w w Rww ;
T
2n m N 1 k T N N (k ) (k) E (k ) (k) R 1 lim ) (
w u w v Rwv ;
T
m m N 1 k T N N (k ) (k) E (k ) (k) R 1 lim ) (
v v v v Rvv 。 若吾人進一步假設輸入擾動向量u(k)亦為一隨機過程,則可合併輸入擾動向量與噪訊向量,因此式(2.13)與(2.14)可分別改寫為: z(k1)Az(k)w(k) (2.16) y(k)Cz(k)v(k) (2.17) 其中,輸入擾動向量已隱含於噪訊中,若輸入擾動之特性與假設不符,且 ) (k w 與v(k)不滿足式(2.15),則識別結果可能出現誤差。
19
2.3 SRIM 系統識別理論
SRIM 乃由 2.2.2 節之離散時間狀態系統為基礎所發展,即 z(k1)Az(k)Bu(k) (2.18) y(k)Cz(k)Du(k) (2.19) 將式(2.19)之時間逐步推移疊代1~p次,其中z()亦由式(2.18)逐步推移 疊代,則此一馬可夫過程(Markov Process)可以擴大系統之型式整理為: ) 1 ( ) 2 ( ) 1 ( ) ( ) ( ) 1 ( ) 2 ( ) 1 ( ) ( 4 3 2 1 2 p k k k k k p k k k k p p p p u u u u D B CA B CA B CA D CB CAB D CB D z CA CA CA C y y y y (2.20a) 或簡化為 ) ( ) ( ) (k p k p p k p O z T u y (2.20b) 其中, 1 ) 1 ( ) 2 ( ) 1 ( ) ( ) ( mp p R p k k k k k y y y y y , 1 ) 1 ( ) 2 ( ) 1 ( ) ( ) ( rp p R p k k k k k u u u u u (2.21a) 1 2 p p CA CA CA C O , D B CA B CA B CA D CB CAB D CB D T 4 3 2 p p p p (2.21b) n mp p R 2 O 為可觀測性矩陣(Observability Matrix); mprp p R T 為 Toeplitz矩陣,由馬可夫參數(Markov Parameters)組成;p 為整數,其最小值與 A 矩陣之維度有關,將於 2.3.1 小節(計算 A 矩陣)中作說明。 觀察矩陣Op可知,求取結構系統參數所需之 A 與 C 矩陣即隱含於其 中,因此,吾人可由Op矩陣中萃取A 與 C 。再將式(2.20b)由時間k逐步時 序推移至k+N-1(N為資料長度減p),並予合併得擴大之型式如下: ) ( ) ( ) (k p k p p k p O Z TU Y (2.22) 其中, N mp p p p p R N p k p k p k N k k k N k k k N k k k k ) 2 ( ) ( ) 1 ( ) ( ) 2 ( ) 1 ( ) 1 ( ) 1 ( ) ( ] ) 1 ( ) 1 ( ) ( [ ) ( y y y y y y y y y y y y Y (2.23) N rp p p p p R N p k p k p k N k k k N k k k N k k k k ) 2 ( ) ( ) 1 ( ) ( ) 2 ( ) 1 ( ) 1 ( ) 1 ( ) ( ] ) 1 ( ) 1 ( ) ( [ ) ( u u u u u u u u u u u u U k
k k kN
R2nN ) 1 ( ) 1 ( ) ( ) ( z z z Z 由於Yp(k)與Up(k)皆由已知的輸出與輸入量測資料組成,藉由兩者之相 關 性 可 求 得 Op 矩 陣 , 其 自 相 關 ( Auto-Correlation ) 與 互 相 關 (Cross-Correlation)矩陣定義如下: (1/N) (k) (k) T p p yy Y Y R Ryu (1/N)Yp(k)UTp(k) (1/N) (k) (k) T p p uu U U R Ryz (1/N)Yp(k)ZT(k) (2.24) (1/N) (k) (k) T zz Z Z R Rzu (1/N)Z(k)UTp(k)21 其中,對稱矩陣 mp mp yy R R 、 rp rp uu R R 與 n n zz R 2 2 R 分別為輸出觀測矩 陣 Yp(k)、 輸 入 矩 陣Up(k)及 全 狀 態 矩 陣 Z(k)的 自 相 關 矩 陣 ; 矩 陣 rp mp yu R R 、 mp n yz R 2 R 與 n rp zu R 2 R 分別為Yp(k)對Up(k)、Yp(k)對於 ) (k Z 及Z(k)對於Up(k)的互相關矩陣。
2.3.1
萃取矩陣 A 和 C
由式(2.22)左右兩邊乘上(1/N) T(k) p U ,可得: Ryu OpRzuTpRuu (2.25) 若 1 uu R 為非奇異矩陣,則由式(2.25)可得: 1 ] [ yu p zu uu p R O R R T (2.26) 同樣地,將式(2.22)左右兩邊乘上(1/N) T(k) p Y ,可得: T yu p T yz p yy O R TR R (2.27) 又於式(2.22)左右兩邊乘上(1/N)XT(k)可得: T zu p zz p yz O R TR R (2.28) 再將式(2.26)之Tp代入式(2.27)與式(2.28),移項整理後可得: T p T zu uu zu zz p T yu uu yu yy R R R O R R R R O R 1 ( 1 ) (2.29) 茲定義 T yu uu yu yy hh R R R R R 1 , T zu uu zu zz zz R R R R R~ 1 ,則式(2.29)可簡化 為: T p zz p hh O R O R ~ (2. 30) 茲對 mpmp hh R 則可得到:
T n n n T n n n T hh V V U S V S 0 0 S U U USV R 0 0 0 (2.31) 其中, mp n n R 2 U 為 T hh hhR R 之非零特徵值所對應之左側單位特徵向量(Left Unitary Eigenvectors); 0 0 n mp R U 為 T hh hhR R 之零奇異值(Singular Values) 所對應之左側單位特徵向量,其中n0 mp2n; n n n R 2 2 S 為 T hh hhR R 之非 零特徵值所組成之對角矩陣; 0 0 0 n n R S 為 T hh hhR R 之零奇異值所組成之對角 矩 陣; 為 T hh hhR R 之 非零 特 徵 值所 對 應 之右 側 單 位特 徵 向量(Right Unitary Eigenvectors); 0
0 n mp R V 為 T hh hhR R 之零奇異值所對應之 右側單位特徵向量。 式(2.31)中之矩陣 U 及 V 分別為 T hh hhR R 與 T hh hhR R 之特徵向量所組成之 座標轉換矩陣,且 U 及 V 皆為正交矩陣;而矩陣 S 為 T hh hhR R 或 T hh hhR R 之奇 異值所組成之對角矩陣。 比較式(2.30)與式(2.31)可知: n p U O (2.32a) 以及 n zz S R~ (2.32b) 換言之,可觀測性矩陣Op可由R 矩陣之奇異值分解(SVD)求得,此為hh 求取矩陣A 與C 之關鍵。以下將進一步說明如何由矩陣Op求取矩陣 A 與 C。 觀察式(2.21b),O 可拆解成子空間,如: n mp n R 2 V
23 1 3 2 :) , : 1 ( p p m pm CA CA CA CA O (2.33a) 或 2 2 :) , ) 1 ( : 1 ( p p p m CA CA CA C O (2.33b) 其中,Op(m1:pm,:)代表第m+1至pm列和所有行向量所組成之矩陣; :) , ) 1 ( : 1 ( p m p O 代表第1至(p-1)×m列和所有行向量所組成之矩陣。 若將式(2.33b)改寫成: A O A CA CA CA C CA CA CA CA O ( 1: ,:) (1:( 1) ,:) 2 2 1 3 2 m p pm m p p p p (2.34) 則由式(2.34)可求得矩陣A,即 :) , : 1 ( :) , ) 1 ( : 1 ( p m p m pm p O O A (2.35) 其中, T n p m p p T p p p m p m p m R ) 1 ( 2 1 :) , ) 1 ( : 1 ( :)] , ) 1 ( : 1 ( :) , ) 1 ( : 1 ( [ O O O O 為Op之擬逆(Pseudo-Inverse)矩陣。p至少則需滿足Op(1:(p1)m,:)的秩 (Rank)大於或等於2n: n m p 1) 2 ( (2.36a) 或