國立交通大學
土木工程學系
碩 士 論 文
以道路知識進行車載光達點雲之道路點雲與
道路標記萃取
The Extraction of Road Regions and Road Marks from
Mobile Lidar Point Clouds based on Knowledge of Road
研 究 生:連以諾
指導教授:張智安
以道路知識進行車載光達點雲之道路點雲與道路標記萃取
The Extraction of Road Regions and Road Marks from
Mobile Lidar Point Clouds based on Knowledge of Road
研 究 生:連以諾 Student:Yi-No Lien
指導教授:張智安 Advisor:Tee-Ann Teo
國 立 交 通 大 學 土 木 工 程 學 系 碩 士 論 文 A ThesisSubmitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Civil Engineering
July 2013
Hsinchu, Taiwan, Republic of China
以道路知識進行車載光達點雲之道路點雲與道路標記萃取
學生:連以諾 指導教授:張智安
國立交通大學土木工程學系
中文摘要
光達(Light Detection and Ranging, Lidar)是主動式系統,光達藉由短時間發射大量脈 衝,獲得大量且密集的三維點座標,一般稱之為點雲(Point clouds)。隨著撞擊物體材質 的不同,接收脈衝的回訊強弱也有所不一,因此點雲有明暗差異。透過大量三維空間的 點座標以及點雲明暗程度,點雲可以描繪物體的幾何外觀,並以輻射差異表現不同材質 的物體。車載光達將光達裝置於汽車,對於道路及街景進行掃描,可獲得較完整且密度 較高的道路點雲。因此車載光達點雲可細緻且完整的描繪道路的外觀,提供可靠的觀測 資料以獲取道路資訊。 本研究目的為發展半自動化道路資訊萃取,以道路知識從光達點雲中獲取道路區域 與道路標記,並以資訊回饋方式提升道路資訊萃取成果。研究中首先以人工給定大略的 路寬,對原始點雲進行資料切割,濾除道路範圍外的點雲以降低資料量。接著,將切割 後的點雲網格化產生回波影像,以形狀幾何萃取白虛線與斑馬線,再藉由人工給予車道 線的數量及初始白虛線的概略位置,自動偵測及連結白虛線以獲得道路車道線。萃取道 路區域方面,以高程門檻概略濾除非路面點,再使用車道線推估路肩位置獲得道路邊界, 並以三次多項式擬合邊界內的點雲,進一步剔除非路面點,得到道路區域內的路面點雲。 道路標記使用萃取的路面點產生回波影像,以 Sum of Absolute Difference (SAD)計算回 波影像中道路標記與資料庫模板的相似度,辨識道路標記的種類。
研究中,使用 Riegl VMX-250 車載光達獲取的點雲資料進行實驗。實驗區域包含平 面道路與高架道路,其地點分別是內湖區的舊宗路與台北市民權大橋。成果分析部分, 道路區域針對平面與高程進行驗證。平面以地測資料驗證道路邊界與路寬,高程則以人 工編修路面點評估自動偵測路面點雲之精度。道路標記以辨識種類的成果進行評估分析,
並以 e-GPS 在道路標記上測得的角點驗證道路標記平面精度。 研究成果顯示,本研究方法可成功萃取平面道路與高架道路的道路資訊。道路區域 平面精度的成果可達 10 公分,高程精度部分,成果與人工編修 DEM 相比較,其實驗成 果顯示人工分類之路面點與自動萃取之路面點有很高的一致性。道路標記萃取的成功率 可達 70%,而誤判率低於 5%或誤判個數小於 5 個。道路標記成果的平面精度可達 10 公 分。 關鍵字:移動式光達系統、道路知識、道路資訊、特徵萃取
The Extraction of Road Regions and Road Marks from
Mobile Lidar Point Clouds based on Knowledge of Road
Student:Yi-No Lien Advisor:Tee-Ann Teo
Department of Civil Engineering
National Chiao Tung University
Abstract
Lidar (Light Detection and Ranging) is an active system to acquire three-dimensional spatial information. Lidar emits a large number of laser pulses to measure three-dimensional coordinates of the objects in a short time and these three-dimensional coordinates called point clouds. Lidar system scans different objects and the return signals have different intensities. Hence, lidar point clouds are useful information to extract the geometry and attribute of the objects.
The purpose of this research is to develop a semi-automatic method to extract road information from mobile lidar point clouds. This study includes four major parts. First, we divide the point clouds into several road parts. Then, the road parts are converted into intensity images to extract white dashed and zebra crossing, and we connect the white dashed to obtain lanes. Next, we use the road lanes to find the road boundaries. This study utilizes the cubic curve fitting and point-to-curve distance to extract road points. Finally, road marks are recognized by calculating the similarity index from intensity image and road primitives.
The test data are acquired by Riegl VMX-250 and the test area are located in Chiu-Tsung Road and Min-cyuan Bridge in Taipei city. In verification, we compare the extracted results, independent check points, and manual edited DEM.
According to the experimental results, the proposed method may extract road information in overhead road and plane road successfully. The accuracy of the road boundary
is better than 10 cm, and result of the road surface is close to manual edited digital elevation model (DEM). The successful rate of the road marks extraction is better than 70%, and commission error is lower than 5%. Moreover, the accuracy of road marks is better than 10 cm.
致謝
兩年的時間過得很快,終於我也完成了屬於自己的碩士論文,走完人生的一個里程 碑。回憶碩士班的日子,除了專業上的訓練,也在求學過程裡更加認識自己的不足與需 要努力的地方,因此這一篇碩論能夠完成不僅是自己努力的成果,而是許多人付出與耐 心的結晶。除了要感謝在身邊的人,我也想將這篇論文擺放在神的面前,因為這份信仰, 讓我得到了比預想中更多的收穫與感受。 首先,我最感謝的是陪伴我兩年的張智安老師,老師對於研究的熱情以及耐心的教 導讓我在做研究的過程有很大的鼓勵,特別是在實驗鬼打牆的時候,老師總是能夠提供 意見並且細心的教導,讓我在錯誤中能夠慢慢地學習專業的知識、調整自己做研究的態 度,而且也看到如何站在一個幫助者的角色去鼓勵與體貼別人。另外,也要謝謝史天元 老師、王驥魁老師和王聖鐸老師對論文的指教,讓論文的內容可以更加的完整。 我也要謝謝跟我兩年的同學,謝謝宛宜總是直率不避諱地給研究上的意見,直接打 爆盲點讓我看到自己沒注意到的地方。謝謝張朔、大任、麵包和鬼鬼在我很煩的時候介 紹我遊戲讓我分心,調劑做研究的苦悶,我會懷念研討會挨家挨戶去全家買 D3 的回憶。 謝謝俊銘和健輝罩我的作業,沒有你們我會爆炸吧。謝謝暐尊總是讓我問一些很瑣碎的 問題。謝謝阿猴、冠勳和阿堂幫忙計畫,阿猴你真的很有潛力不管是在解決問題還是寫 程式上,都比我強太多了;冠勳,其實我很佩服你在碩一進來就很有方向知道自己要做 甚麼,希望你朝著目標前進;阿堂建模的功力很強,說好要找你學得但是最後還是沒時 間,真的是很可惜。謝謝鎔壑、琨原、書涵和弋丞,雖然在不同的實驗室,但是有你們 讓碩班生活更多采多姿;還有凱智、斯丞,感謝你們在大學就下海來幫忙計畫,以後就 靠你們了。還有大師,你無邊法力要繼續照亮測量組的大家阿。 最後要謝謝爸爸、媽媽還有以馨,碩班期間回家的時間更少了,但謝謝你們依然在 背後支持和鼓勵。還有梅竹團契和中正教會的各位,能一群信仰上的夥伴互相幫助真的 是一件很棒的事。最後是琬婷,雖然我們常在忙各自的事,但在這樣子的生活中仍彼此 鼓勵和關心,對我來說那便是幸福的一件事。然後謝謝閱讀這篇論文的讀者,感謝你願意花時間看這篇論文。每一個研究都是作 者與支持他的人努力的成果,希望這篇文章能夠成為你的幫助,完成屬於你的論文。 祝福各位 願每一個人在人生路途中發掘自己的夢像
並乘著祝福的風飛往屬於自己的一片天空
目錄
中文摘要 ... I Abstract ... III 致謝 ... V 目錄 ... VII 圖目錄 ... IX 表目錄 ... XIII 第 1 章 前言 ... 1 1-1 研究背景 ... 1 1-2 研究動機 ... 3 1-3 研究目的 ... 5 1-4 論文架構 ... 5 第 2 章 文獻回顧 ... 6 2-1 台灣市區道路定義與介紹 ... 7 2-2 道路區域 ... 9 2-2-1 航照影像資料 ... 11 2-2-2 空載光達資料 ... 13 2-2-3 車載光達資料 ... 16 2-3 道路標記 ... 20 2-2-1 影像資料 ... 20 2-2-2 車載光達 ... 22 第 3 章 研究方法 ... 24 3-1 研究流程 ... 24 3-2 點雲資料切割 ... 26 3-2-1 計算道路中心線 ... 263-2-2 資料切割 ... 27 3-3 萃取白虛線與斑馬線 ... 28 3-4 道路區域萃取 ... 31 3-4-1 一般路段 ... 31 3-4-2 十字路口 ... 37 3-5 道路標記萃取 ... 38 3-5-1 道路標記模型庫 ... 39 3-5-2 計算物件中心點與路段主軸方向 ... 39 3-5-3 影像二元化與 SAD 影像匹配 ... 41 3-6 驗證分析與精度評估 ... 43 3-6-1 原始車載光達資料驗證 ... 43 3-6-2 道路區域驗證與精度評估 ... 44 3-6-3 道路標記驗證與精度評估 ... 44 第 4 章 研究資料 ... 45 4-1 測區一 ... 45 4-2 測區二 ... 45 第 5 章 研究成果 ... 50 5-1 原始車載光達資料驗證 ... 50 5-2 道路區域萃取成果 ... 51 5-2-1 測區一 台北市內湖區舊宗路 ... 51 5-2-2 測區二 台北市民權大橋 ... 61 5-3 道路標記萃取成果 ... 65 5-3-1 測區一 台北市內湖區舊宗路 ... 66 5-3-2 測區二 台北市民權大橋 ... 76 第 6 章 結論與建議 ... 84 參考文獻 ... 87
圖目錄
圖 1-1、光達掃描線俯視圖(Sander, 2010) ... 2
圖 1-2、Optech Lynx 車載光達系統(Optech, 2010a) ... 3
圖 1-3、Riegl VMX-250 車載光達系統(Riegl, 2012) ... 3 圖 1-4、各等級道路模型示意圖(OGC-CITYGML, 2012) ... 4 圖 1-5、車速與單位面積的點雲密度關係圖(Riegl, 2012)... 5 圖 2-1、主要道路(類型一) (內政部營建署,2003) ... 8 圖 2-2、幾何特徵與輻射特徵示意圖 ... 9 圖 2-3、拓樸資訊與空間資訊示意圖 ... 10 圖 2-4、航照影像萃取道路區域示意圖(Baumgartner et al., 1999)... 11
圖 2-5、道路路段模型(Hinz and Baumgartner, 2003) ... 12
圖 2-6、以平面特徵萃取道路區域示意圖(Akela et al., 2005) ... 13
圖 2-7、以高程影像與回波影像萃取道路區域示意圖(Zhao et al., 2011) ... 14
圖 2-8、航照影像偵測停車場示意圖(Hu et al., 2004)... 15
圖 2-9、結合街廓圖與光達點雲萃取道路之成果(Chen and Lo, 2009)... 15
圖 2-10、空載光達與車載光達點雲資料之比較(Zhou and Vosselman, 2012) ... 16
圖 2-11、以路肩石位置求得道路邊界(Denis et al., 2010) ... 17
圖 2-12、Förstner 運算子萃取路肩點(Ibrahim and Lichti, 2012) ... 18
圖 2-13、道路面之俯視、橫向剖面與縱向剖面圖 ... 18
圖 2-14、結合卡曼濾波進行路面擬合示意圖(俯視圖)(Lam et al., 2010) ... 19
圖 2-15、以 RANSAC 演算法萃取道路區域(Smadja et al., 2010) ... 19
圖 2-16、道路標記模型(Hinz and Baumgartner, 2003) ... 20
圖 2-17、測繪車VISAT𝑇𝑀(Cheng et al., 2008) ... 21
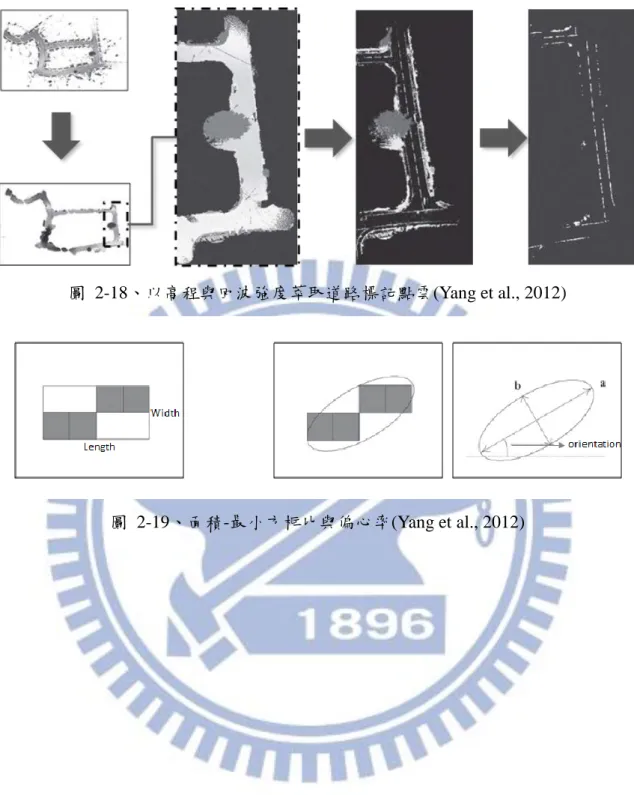
圖 2-18、以高程與回波強度萃取道路標記點雲(Yang et al., 2012) ... 23
圖 3-1、研究流程圖 ... 25
圖 3-2、車載光達軌跡檔 ... 26
圖 3-3、Riegl VMX-250 BODY coordinate system ... 27
圖 3-4、資料分割示意圖 ... 27 圖 3-5、車道線萃取階段性成果示意圖 ... 28 圖 3-6、車道線萃取細部流程圖 ... 28 圖 3-7、白虛線萃取之各階段成果 ... 29 圖 3-8、白虛線分類至車道線示意圖 ... 30 圖 3-9、道路區域萃取階段性成果示意圖 ... 31 圖 3-10、一般道路萃取流程圖 ... 31 圖 3-11、光達點雲網格化示意圖 ... 32 圖 3-12、車道線平移之示意圖 ... 33 圖 3-13、路肩位置萃取示意圖 ... 34 圖 3-14、萃取出之路肩點示意圖 ... 34 圖 3-15、網格內點雲投影與路面擬合示意圖 ... 35 圖 3-16、十字路口與相鄰路段之路肩點示意圖 ... 37 圖 3-17、道路標記萃取階段性成果示意圖 ... 38 圖 3-18、道路標記萃取流程示意圖 ... 38 圖 3-19、道路標記模型庫之模板 ... 39 圖 3-20、對向車道對道路標記方向影響之示意圖 ... 40 圖 3-21、道路標記旋轉示意圖 ... 41 圖 3-22、回波影像二值化示意圖 ... 41 圖 3-23、影像大小為 11*11 之 SAD 示意圖 ... 42 圖 3-24、e-GPS 於道路標記上之量測位置 ... 43 圖 4-1、舊宗路位置圖 ... 46 圖 4-2、以高程展示舊宗路點雲 ... 46
圖 4-3、以回波強度展示舊宗路點雲 ... 47 圖 4-4、民權大橋位置圖 ... 48 圖 4-5、以高程展示民權大橋點雲 ... 48 圖 4-6、以回波強度展示民權大橋點雲 ... 48 圖 5-1、各路段編號對應位置圖 ... 52 圖 5-2、路面下點雲影響萃取路肩點之示意圖 ... 54 圖 5-3、高程差累積直方圖 ... 55 圖 5-4、道路區域萃取到非路面點之案例(1) ... 56 圖 5-5、道路區域萃取到非路面點之案例(2) ... 57 圖 5-6、道路路況變化較大之區域 ... 58 圖 5-7、舊宗路不同路段萃取成果 ... 59 圖 5-8、舊宗路道路萃取成果(白色為原始點雲;橘色為道路區域點雲) ... 60 圖 5-9、高程差累積直方圖 ... 61 圖 5-10、高架道路超高示意圖 ... 62 圖 5-11、超高路段萃取過程示意圖 ... 62 圖 5-12、民權大橋成果展示(白色為原始點雲;橘色為道路區域點雲) ... 63 圖 5-13、民權大橋成果展示(高程展示) ... 63 圖 5-14、民權大橋各路段萃取成果 ... 64 圖 5-15、舊宗路白虛線初始值位置圖 ... 67 圖 5-16、道路標記外型不完整之示意圖 ... 68 圖 5-17、雜訊導致道路標記漏判示意圖(1) ... 69 圖 5-18、雜訊導致道路標記漏判示意圖(2) ... 70 圖 5-19、行車遮蔽道路標記示意圖(1) ... 72 圖 5-20、行車遮蔽道路標記示意圖(2) ... 73 圖 5-21、舊宗路道路標記之成果(1) ... 74 圖 5-22、舊宗路道路標記之成果(2) ... 75
圖 5-23、民權大橋白虛線初始值位置圖 ... 77 圖 5-24、雜訊導致道路標記漏判示意圖(3) ... 78 圖 5-25、點雲密度低造成漏判之示意圖(1) ... 79 圖 5-26、點雲密度低造成漏判之示意圖(2) ... 79 圖 5-27、民權大橋與舊宗路點雲密度比較(光達點雲) ... 80 圖 5-28、民權大橋與舊宗路點雲密度比較(回波影像) ... 80 圖 5-29、白虛線編號 ... 81 圖 5-30、民權大橋道路標記之成果 ... 82
表目錄
表 1-1、Lynx & VMX-250 光達規格(Optech, 2010b; Riegl, 2012) ... 2
表 2-1、萃取道路資訊文獻回顧之總表 ... 6 表 2-2、部分市區道路橫斷面基本佈設類型範例(內政部營建署,2003) ... 8 表 2-3、各物體之回波強度值(Yang et al., 2012) ... 22 表 4-1、測區資料一覽表 ... 49 表 5-1、原始資料驗證成果(單位:公尺) ... 50 表 5-2、舊宗路道路邊界驗證成果(單位:公尺) ... 53 表 5-3、宗路道路路寬驗證成果(單位:公尺) ... 54 表 5-4、舊宗度到路面高程驗證成果(單位:公尺) ... 55 表 5-5、舊宗度到路面高程驗證成果(單位:公尺) ... 61 表 5-6、道路標記各項參數一覽表 ... 65 表 5-7、舊宗路道路標記萃取成果 ... 66 表 5-8、指向線萃取成果 ... 71 表 5-9、舊宗路道路標記精度驗證(單位:公尺) ... 74 表 5-10、民權大橋道路標記萃取成果 ... 76 表 5-11、點雲密度與標記萃取關係(單位:𝑝𝑡/𝑚2) ... 81 表 5-12、民權大橋道路標記精度驗證(單位:公尺) ... 82
第1章 前言
1-1 研究背景
光達(Light Detection and Ranging, Lidar)是主動式系統。光達透過發射脈衝,並藉由 紀錄發射與接收到回訊的時間差,計算脈衝在空間中撞擊到該物體位置,以獲得點座標。 由於光達能在短時間之內發射大量脈衝,因此可以獲得大量且密集的點群,一般稱之為 點雲(Point clouds)。另外,隨著撞擊物體材質的不同,接收到回訊的訊號強弱也有所不 一,因此點雲的明暗程度可用以表示訊號的強弱。透過大量三維空間的點座標以及點雲 明暗程度,便能描繪出物體的幾何外觀,並以輻射差異表現不同材質的物體。 光達掃描的方式可分為靜態掃描與動態掃描。靜態掃描是將儀器架設在固定點進行 掃描;動態掃描則是將儀器搭載在不同的移動載具,在載具移動的過程中獲取點雲資料, 例如:搭載在飛機的空載光達(Airborne Lidar System, ALS)與車上的車載光達(Mobile Lidar System, MLS)。由於載具移動過程中,儀器的位置隨時間改變,需在載具上加裝其 他儀器,以獲取載具在移動中的位置與姿態,整合不同時間所掃描的點雲資料。以車載 光達為例,搭載儀器可以分為導航感測器與資料獲取感測器(Kukko et al., 2009)。導航感 測 器 包 含 全 球 定 位 系 統 (Global Positioning System, GPS) 與 慣 性 導 航 系 統 (Inertial Navigation System, INS)。另外,也會加裝里程計(Distance Measuring Instrument, DMI)在 GPS 訊號不佳時作為輔助。資料獲取感測器,一般則以雷射掃描儀與數位相機為主。
車載光達獲取資料的方式,是在道路上以感測器對四周的物體進行掃描。車載光達 掃描可快速獲得較高密度的點雲描繪街景,如:道路路面、建物牆面與其他物體的細部 幾何特徵。加上點雲精度可達到數公分等級,對於一些高精度與細節的分析與建模而言, 車載光達是良好的資料來源。
以圖 1-2 和圖 1-3 的 Optech Lynx 及 Riegl VMX-250 車載光達為例,兩種型號的車 載光達都搭載了 GPS、INS 和 DMI 獲取載具的位置與姿態。資料獲取感測器 Optech Lynx 裝有兩台雷射掃描儀與四台工業級數位相機;Riegl VMX-250 裝有兩台雷射掃描儀
與四台數位相機(最大可加設六台數位相機)。Lynx 與 VMX-250 搭載光達掃描儀的型 號與規格如下表 1-1(Optech, 2010b; Riegl, 2012),其中絕對精度是指衛星訊號良好時, 量測到的三維點雲座標精度;掃描頻率是指單台光達掃描儀在單位時間內的掃描線數量; 量測頻率則是光達發出脈衝的頻率,其頻率越高觀測量越多。
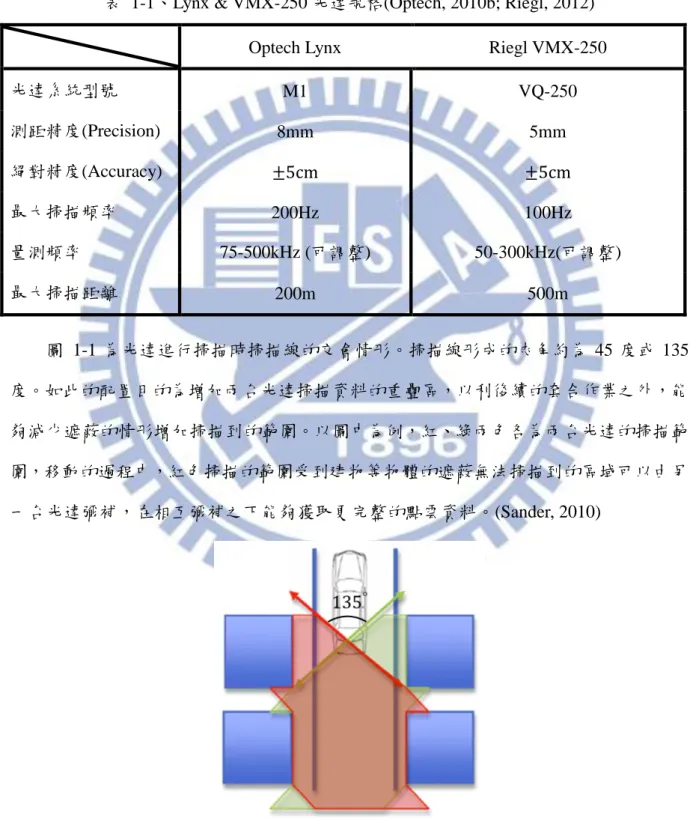
表 1-1、Lynx & VMX-250 光達規格(Optech, 2010b; Riegl, 2012)
項目 Optech Lynx Riegl VMX-250 光達系統型號 M1 VQ-250 測距精度(Precision) 8mm 5mm 絕對精度(Accuracy) ±5cm ±5cm 最大掃描頻率 200Hz 100Hz 量測頻率 75-500kHz (可調整) 50-300kHz(可調整) 最大掃描距離 200m 500m 圖 1-1 為光達進行掃描時掃描線的交會情形。掃描線形成的夾角約為 45 度或 135 度。如此的配置目的為增加兩台光達掃描資料的重疊區,以利後續的套合作業之外,能 夠減少遮蔽的情形增加掃描到的範圍。以圖中為例,紅、綠兩色各為兩台光達的掃描範 圍,移動的過程中,紅色掃描的範圍受到建物等物體的遮蔽無法掃描到的區域可以由另 一台光達彌補,在相互彌補之下能夠獲取更完整的點雲資料。(Sander, 2010) 圖 1-1、光達掃描線俯視圖(Sander, 2010)
圖 1-2、Optech Lynx 車載光達系統(Optech, 2010a) 圖 1-3、Riegl VMX-250 車載光達系統(Riegl, 2012)
1-2 研究動機
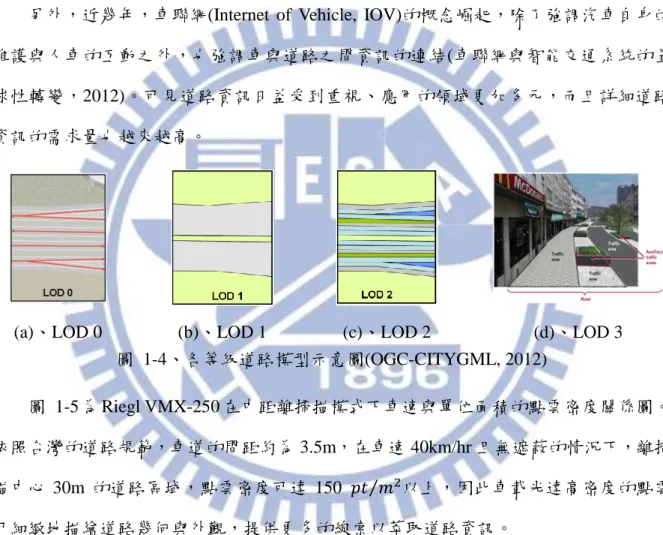
隨著都市發展,如何善用土地資源、環境品質的監測、都市的維護更新與交通管理 等需求因應而生,而有效的管理以及良好的分析有助於提升作業的成效。以 IBM 協助 建置交通壅塞管理方案為例,參與計畫的城市在交通問題改善上皆獲得不錯的成果。如 交通尖峰時段的車流量最高可降低 18%,二氧化碳排放量最多可降低 14%,選擇使用大 眾運輸系統的人數增加 7%等(IBM, 2010)。而詳盡的道路資訊有助於提升各項領域的分 析與應用,如空氣與噪音模型分析、適地性服務(Location Based Service, LBS)、道路安 全與維護、車流量模擬與街道之維護等都有相當幫助(Hinz and Baumgartner, 2003; Jaakkola et al., 2008),因此道路資訊在許多領域佔有重要的角色。除此之外,Open Geospatial Consortium (OGC) CityGML 在 2012 年定義了道路模型 細緻程度的等級(OGC, 2012)。模型等級共可分為四級,為 LOD 0 至 LOD3,其等級越 高,模型含有越豐富的道路資訊。如圖 1-4,LOD0 道路模型僅包含三維資訊的道路中 心線;LOD1 為三維彩帶式的道路模型,提供道路涵蓋的範圍;LOD2 則將道路內的車 道進行分離;LOD3 除了繼承 LOD2 原有的模型之外,包含道路周圍或道路上的物件, 例如人行道、分隔島或道路標記等。
另外,近幾年,車聯網(Internet of Vehicle, IOV)的概念崛起,除了強調汽車自身的 維護與人車的互動之外,也強調車與道路之間資訊的連結(車聯網與智能交通系統的全 球性轉變,2012)。可見道路資訊日益受到重視、應用的領域更加多元,而且詳細道路 資訊的需求量也越來越高。
(a)、LOD 0 (b)、LOD 1 (c)、LOD 2 (d)、LOD 3 圖 1-4、各等級道路模型示意圖(OGC-CITYGML, 2012)
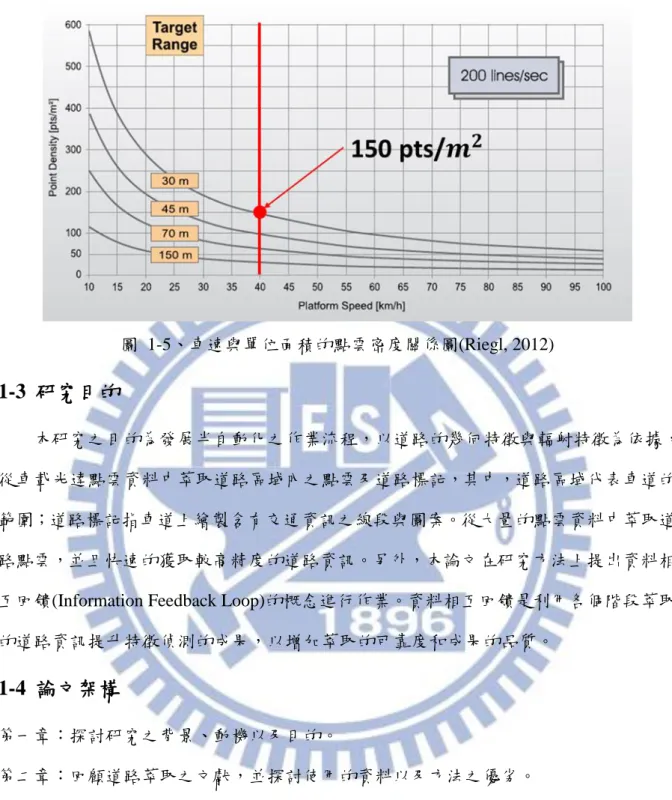
圖 1-5 為 Riegl VMX-250 在中距離掃描模式下車速與單位面積的點雲密度關係圖。 依照台灣的道路規範,車道的間距約為 3.5m,在車速 40km/hr 且無遮蔽的情況下,離掃 描中心 30m 的道路區域,點雲密度可達 150 𝑝𝑡 𝑚⁄ 2以上,因此車載光達高密度的點雲
圖 1-5、車速與單位面積的點雲密度關係圖(Riegl, 2012)
1-3 研究目的
本研究之目的為發展半自動化之作業流程,以道路的幾何特徵與輻射特徵為依據, 從車載光達點雲資料中萃取道路區域內之點雲及道路標記,其中,道路區域代表車道的 範圍;道路標記指車道上繪製含有交通資訊之線段與圖案。從大量的點雲資料中萃取道 路點雲,並且快速的獲取較高精度的道路資訊。另外,本論文在研究方法上提出資料相 互回饋(Information Feedback Loop)的概念進行作業。資料相互回饋是利用各個階段萃取 的道路資訊提升特徵偵測的成果,以增加萃取的可靠度和成果的品質。1-4 論文架構
第一章:探討研究之背景、動機以及目的。 第二章:回顧道路萃取之文獻,並探討使用的資料以及方法之優劣。 第三章:介紹本研究使用的方法及各步驟流程。 第四章:介紹研究中使用之資料。 第五章:展示並分析本研究之成果。 第六章:本研究成果之結論與建議。第2章 文獻回顧
道路資訊可分為道路區域(Road Region)與道路標記(Road Mark)。萃取時,利用道路 知識(Road Knowledge)作為依據,獲取道路資訊。道路知識可分為幾何特徵(Geometry Feature)、輻射特徵(Radiometry Feature)、拓樸資訊(Topology Information)與空間資訊 (Context Information)(Baumgartner et al., 1999)。另外,根據使用資料型態不同,萃取道 路資訊的方法也會有所差異。本章節首先介紹台灣市區道路之定義及相關規範。接著, 分別介紹道路區域與道路標記的萃取方法,並將文獻依照使用的資料分類,探討在不同 的資料型態下,道路資訊萃取的方法及優劣,文獻分類如表 2-1。 表 2-1、萃取道路資訊文獻回顧之總表 資料型態 相關文獻 道 路 區 域 航照影像 萃取市區與鄉間道路:
Baumgartner et al. (1999) , etc 以市區道路為主:
Hinz et al. (2003) , etc 空載光達 以高程與回波強度萃取:
Zhao et al. (2011), Clode et al. (2004), Hu et al. (2004), etc 加入其他資訊(如:街廓圖)提升成果:
Chen and Lo (2009), etc
車載光達 以路肩點定義道路邊界萃取道路區域:
Jaakkola et al. (2008), Denis et al. (2010), Ibrahim et al. (2012) , etc 基於路面幾何萃取道路區域:
Lam et al. (2010), Smadja et al. (2010) , etc 道
路 標 記
影像資料 空載影像:
Hinz et al. (2003) , etc 車載近景影像:
Cheng et al. (2008), etc 車載光達 以回波影像萃取道路標記:
2-1 台灣市區道路定義與介紹
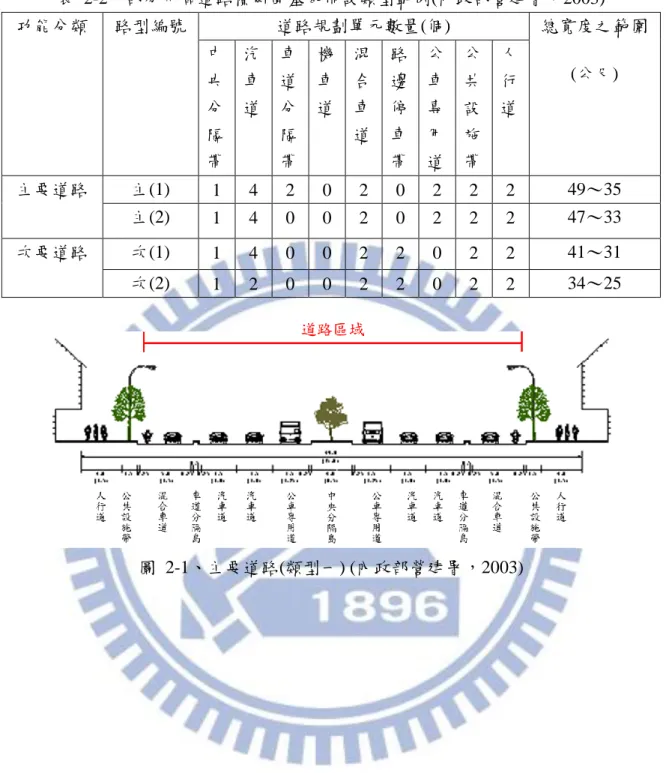
根據台灣市區道路人行道設計手冊(內政部營建署,2003),依道路功能可將市區道 路分成快速道路、主要道路、次要道路及服務道路。快速道路主要用於都市之間與都會 區內之交通使用;主要道路除了上述功能之外,亦供應都市內繁忙地區與外圍市鄉鎮間 的聯繫;次要道路則主要做為鄰近社區、鄉鎮與村里間的聯絡道路;服務道路則可視為 次要道路的分支,分成集散道路與巷道。 市區道路是由數種規劃單元組成,其單元的內容包含下列八種: 一、車道:汽車道、機車專用道、公車專用道。 二、分隔帶:中央分隔帶、車道(快慢)分隔帶。 三、腳踏車道。 四、人行道。 五、路邊停車空間。 六、排水設施。 七、公共設施帶。 八、其它。 依照不同功能的道路種類,包含的單元也不盡相同。表 2-2 為部分市區道路橫斷面 規劃單元配置表。對應的道路斷面圖如圖 2-1 所示,道路區域所涵蓋的範圍,從道路中 間起算包含分隔島、車道至人行道。 使用影像與空載光達萃取的道路區域,其涵蓋範圍包含分隔島、車道至人行道;在 車載光達中,高密度的點雲能夠細緻地描述道路的幾何外觀,因此亦有研究依照不同的 規劃單元進行萃取,如僅萃取車道範圍的點雲。在本研究中,萃取道路區域的範圍定義 在車道範圍,研究中道路區域即代表車道區域。表 2-2、部分市區道路橫斷面基本佈設類型範例(內政部營建署,2003) 功能分類 路型編號 道路規劃單元數量(個) 總寬度之範圍 (公尺) 中 央 分 隔 帶 汽 車 道 車 道 分 隔 帶 機 車 道 混 合 車 道 路 邊 停 車 帶 公 車 專 用 道 公 共 設 施 帶 人 行 道 主要道路 主(1) 1 4 2 0 2 0 2 2 2 49~35 主(2) 1 4 0 0 2 0 2 2 2 47~33 次要道路 次(1) 1 4 0 0 2 2 0 2 2 41~31 次(2) 1 2 0 0 2 2 0 2 2 34~25 圖 2-1、主要道路(類型一) (內政部營建署,2003)
2-2 道路區域
道路區域在此表示道路中車道的區域。對於道路區域而言,幾何特徵為道路區域的 幾何形狀的資訊。包含道路的路長、路寬、縱向與橫向坡度等,如圖 2-2(a)所示。由於 道路在設計時,必須遵守道路設計規範的要求,因此幾何特徵可作為萃取道路的約制條 件。 輻射特徵指道路與其他物件在因為材質上的不同,而造成輻射強度上的差異。以圖 2-2 (b)為例,不同材質的物體在點雲的明暗程度上有所不同;以道路觀察,道路大都是 由混凝土、瀝青或柏油等均質材料組成,因此輻射變化上較為均調。在萃取的過程中, 便可依此作為萃取的依據,作為判斷的知識之一。 (a)、幾何特徵(內政部營建署,2003) (b)、輻射特徵 圖 2-2、幾何特徵與輻射特徵示意圖拓樸資訊與空間資訊則是指物件在空間中的位相關係。拓樸資訊在此強調的是同一 類物體之間的位相關係,例如道路與道路之間的聯結。在道路區域中,特別指路網結構 的位相關係,例如棋盤式的路網結構等。圖 2-3(a)為一區域的街廓圖,此圖便提供該區 域道路的拓樸資訊。 空間資訊則是不同種類物體之間的位相關係,例如道路與建物、樹木或道路標記等 的關係。圖 2-3(b)為道路與道路標記之間的位相關係的例子,道路設計的過程中,道路 的規格與道路標記的繪製方法都有相關的規定,因此萃取時可利用兩者之間的空間資訊 作為判斷的依據之一。
(a)、拓樸資訊(Chen and Lo, 2009) (b)、空間資訊(交通部,2013) 圖 2-3、拓樸資訊與空間資訊示意圖
除了以不同的道路知識萃取道路區域之外,依據使用不同的資料型態,受到資料細 緻度及特性的影響,約制條件與萃取方法也不盡相同。此節將從航照影像、空載光達、 與車載光達三種型態的資料探討萃取道路區域之方法。
2-2-1
航照影像資料
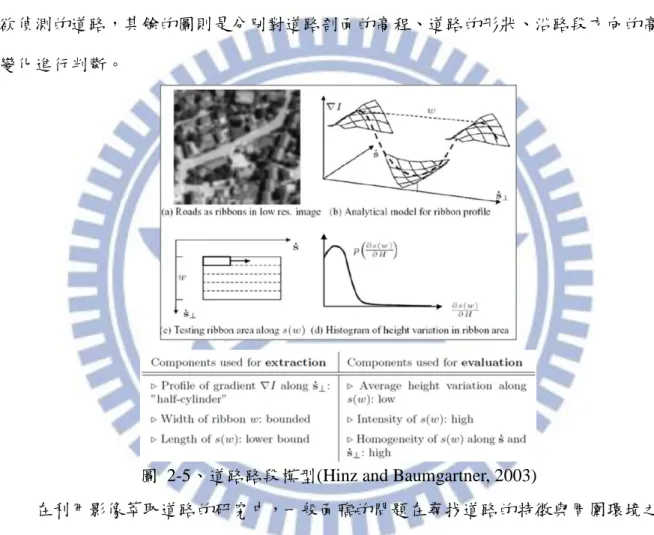
航照影像能提供大範圍的資訊,因此適合應用在都市尺度或大範圍的路網萃取。 Baumgartner et al. (1999)以分層式的方法萃取道路區域。基於道路的幾何形狀與輻射均 調的特性,在低解析度的影像上道路可視為一條線段。因此,該研究首先在低解析度的 影像上萃取道路線段中心線,再從高解析度影像萃取道路邊界線段,將其結果套合在同 張影像上,如圖 2-4 (a)。黑色虛線是低解析度影像所獲得的線段,可視為道路中心線; 白色實線是在高解析度影像獲得的線段,可視為道路邊界。因此,以黑色線段為依據, 連結鄰近斜率近似的白線形成矩形路段(Road Segments),如圖 2-4 (b)。最後,連結各個 路段形成完整的道路,並在道路的交接處設置節點完成路網。 圖 2-4 (c)、 (d)為郊區與都市區道路萃取之成果,圖中顯示都市區域萃取的成果明 顯較差,其主要的原因是受到房屋屋頂線段干擾以及遮蔽的影響。 (a) (b) (c) (d) 圖 2-4、航照影像萃取道路區域示意圖(Baumgartner et al., 1999)Hinz et al. (2003) 延伸了 Baumgartner 的研究,針對都市區的道路萃取進行改善。為 了解決都市區遮蔽的影響,資料上使用多張遙測影像以提供不同視角增加多餘觀測,解 決遮蔽造成資訊不足的問題。另外,考慮都市區的道路結構較為複雜與路況多變,該研 究利用道路知識,考慮道路的幾何、輻射、拓樸等各項特徵,加入數值地表模型(Digital Surface Model, DSM)、影像灰度值、高程梯度設置不同的模型加以約制與判斷,增加萃 取成果的可靠度。以圖 2-5 為例,此模型是萃取道路區域所設定的模型,左上角的圖為 欲偵測的道路,其餘的圖則是分別對道路剖面的高程、道路的形狀、沿路段方向的高程 變化進行判斷。
圖 2-5、道路路段模型(Hinz and Baumgartner, 2003)
在利用影像萃取道路的研究中,一般面臨的問題在尋找道路的特徵與周圍環境之關 係時,受到遮蔽與複雜環境的影響,使得萃取成果不佳。然而,較常處理的方式是以多 張不同視角的影像進行改善(Hu et al., 2004)。但在都市區域內,即使納入多張影像增加 多餘觀測,仍會受到高樓建物的遮蔽、陰影影響與複雜的影像場景(Complicated Image Scene)增加萃取的難度。 另外,對於在都市內的高架道路及立體交叉等複雜路段,僅靠影像萃取不夠完善。 因此,為要提升萃取的可靠度,勢必需要以資料融合的方式納入其他資訊進行萃取。
2-2-2
空載光達資料
光達三維座標點雲可描述物體的外觀,因此在萃取道路區域上,點雲提供的三維資 訊可以作為幾何特徵萃取的資料。另外,光達接收脈衝回波時根據撞擊物體材質的不同, 訊號回波的強度也會有強弱上的差異。基於這個性質,光達點雲的回波強度可以做為輻 射特徵,辨識不同材質當作道路萃取的線索,特別是道路與植被的回波強度,在光達系 統上有良好的辨識能力。再者,配合空載光達儀器掃描方式與掃描航線規劃,可降低建 物遮蔽而無資料的情形;相較於航照影像,也不會因高樓遮蔽產生陰影,因此空載光達 在道路的萃取上能夠達到更好的成果。 以光達點雲萃取道路的研究中,Akela et al. (2005)提出利用道路的幾何特徵為基礎 的方法,以萃取光達點雲中的道路區域。首先,使用不規則三角網(Triangulated Irregular Network, TIN) 將點群資料組合成平面資料,藉由計算各平面的法向量 (∆𝑛⃗ )與平均高度 (∆h),將屬於相同平面的三角網合併。接著,以面積周長比(area-to-boundary ratio)偵測 平面的形狀為長條的帶狀平面,將其視為道路。比值越接近零者,表示該平面的形狀越 有可能為細長型,因此為道路區域的機率就越高。最後,以形態學運算子(Morphology operator)填補破碎的部分,讓道路區域較為完整。圖 2-6 為萃取過程的示意圖,左圖為 組完三角網之成果,不同顏色表示不同類別的三角網,可看到道路區域藉由組 TIN 已被 分類至同一個類別。接著如右圖所示,以面積周長比剔除非道路區域,保留可能為道路 的部分。 圖 2-6、以平面特徵萃取道路區域示意圖(Akela et al., 2005) 左圖:不規則三角網平面合併之成果;右圖:面積周長比萃取之成果Jiaping et al. (2011)、Clode et al. (2004) 和 Hu et al. (2004)提出的方法,皆利用點雲 的高程與回波強度萃取道路。研究中將兩種資訊轉換成網格化的資料,以加速資料處理 效能。由於平面道路的高程通常貼近地表,因此以高程影像(Height Image)作為幾何的約 制,將地表的部分保留。接著,納入回波影像(Intensity Image)依照不同的回波強度對地 表物進行分類,分類通常是將草地、水泥道路、瀝青路、裸露地等與道路加以區分,得 到候選的道路區塊。如圖 2-7 所示,左邊影像為光達回波強度圖,中間則是從高程影像 中找到的道路候選區域(白色的區域為地表),右邊則是整合兩種資訊交集後的結果。 圖 2-7、以高程影像與回波影像萃取道路區域示意圖(Zhao et al., 2011) 分類後的成果,再納入拓樸資訊或空間資訊進行成果優化。以 Jiaping et al. (2011) 的方法為例,利用測區的路網為棋盤狀結構的特性,判斷各區塊的方位是否一致,以剔 除錯誤的區塊。Clode et al. (2004) 則是使用最小邊界矩形(Minimum Bounding Rectangle, MBR) 判斷每一個區塊的外型,保留細長的區域,自動剔除如停車場的區域等塊狀區域 (此區域無法以高程與回波強度濾除)。 在萃取道路過程中,停車場的鋪面材質、高程與道路相近,因此僅使用高程與回波 資訊分類無法分離,必須匯入其他型態的資料作為輔助,增加判斷的資訊。Hu et al. (2004) 的研究中,加入航照影像資料,提供光譜輻射特徵增加車輛的辨識度,以偵測停車場的 位置。圖 2-8(a)為使用高程與回波影像萃取的成果,紅色的線段表示道路萃取成果,可 看到部分的路段穿越街區。因此利用航照影像偵測排列整齊的車輛,以偵測停車場的位 置,並與路段的位置互相對照,修正錯誤的地方。偵測結果如圖 2-8(c)所示。
(a) (b) (c) 圖 2-8、航照影像偵測停車場示意圖(Hu et al., 2004) 另外, Chen and Lo (2009)在研究中加入街廓圖給予完整的拓樸資訊提升道路萃取 的成果。道路街廓圖提供了道路區域二維平面的資訊,光達點雲則提供道路的高程。街 廓圖能給與完整的道路邊界,因此在萃取道路區域的時候,依照道路的位置匯入點雲, 提供道路的高程,獲得道路的三維資訊。此方法在較為複雜的區域,如高架道路、立體 交叉等路段,可獲得良好的成果。
圖 2-9、結合街廓圖與光達點雲萃取道路之成果(Chen and Lo, 2009)
空載光達資料萃取道路區域,可以獲得道路的三維資訊,與影像相較之下,光達可 降低建物遮蔽與陰影對萃取造成的干擾。但空載光達的掃描方式是由空對地的方式,因 此道路依然受到樹木遮蔽的影響,使得部分區域沒有資料,影響萃取成果。另外,空載 光達點雲密度較車載光達低,光達點雲對細緻道路的重建能力有限。如果要提升道路萃 取的成果以及道路資訊的精度,則必須仰賴其他更高精度的輔助資料或是使用能夠更細 緻描述三維資訊的資料。
2-2-3
車載光達資料
車載光達提供高密度的點雲資料,且能夠細緻描繪街景與道路幾何。圖 2-10 為空 載與車載兩種類型的資料在路肩的點雲,圖 2-10(a)顯示空載光達的點雲較為稀疏,而 且僅能約略描述路肩的高差;相較之下,圖 2-10(b)車載光達提供的點雲密度較高,且 描述道路的幾何與實際情況較為符合。對於精度與細緻度要求較高的分析與建模等應用, 車載光達可以提供良好的幾何特徵與高密度的點雲資料。除此之外,車載光達的掃描方 式是在車輛行進間,對於周圍的地物發射脈衝以獲取資料,因此針對道路萃取的研究而 言,雖然仍有遮蔽的情形,但相較於影像與空載光達,資料受到遮蔽的情況較小。 (a) (b)圖 2-10、空載光達與車載光達點雲資料之比較(Zhou and Vosselman, 2012) 依照道路的設計規範與現實的狀況,道路的路面並非完全水平之平面,而是有弧度 的曲面,以利排水及高速公路匝道行車安全;人行道與車道之間也有 15~20 公分的高差。 由於車載光達的資料能夠描述這些細微的幾何,因此能夠使用這些幾何特徵萃取道路區 域。
Denis et al. (2010)以偵測路肩(Curbstone)的位置獲得道路的邊界,進而得到道路的三 維資訊。首先,利用區域成長法(Region Growing)濾除非地面點(Vosselman et al., 2004)。 接著保留地面點網格化產生高程影像,計算影像中的梯度,搜尋可能為路肩位置。為了
提升邊界的精度,在路肩所在位置的網格內蒐尋最高、最低點,將其連線取中點,經直 線擬合可獲得次像元精度,如圖 2-11 所示。 圖 2-11、以路肩石位置求得道路邊界(Denis et al., 2010) Jaakkola et al. (2008)使用路肩高差萃取道路區域。首先,計算高程影像中的梯度, 並依循道路設計規範計算人行道與車道之間的高差設定梯度門檻值。接著,保留梯度值 在門檻內的像元,再偵測排列長條形狀的像元視為路肩,並連結路肩點得到道路的邊界。 接著,將道路邊界內的點雲組成三角網,計算三角形各邊的坡度。當坡度過大時,則將 該點視為非路面點剔除,再重複疊代計算,直到所有三角網的三邊坡度皆低於門檻值為 止,最後得到道路區域。
Ibrahim and Lichti (2012)亦使用路肩點求得道路邊界,研究中以 Förstner 運算元尋找 路肩點。該運算元透過判斷某點與周圍點雲之間的關係,將點分類為孤立點、平面上的 點或是邊緣線上的點三種類別。作為判斷指標的兩個參數如式 2-2 與式 2-3。其中,𝑤與 𝑞為自相關矩陣(Autocorrelation Matrix)A 中,誤差橢圓的半徑與方位;𝐺𝑥與𝐺𝑦則是某點 與鄰近點雲在 x、y 方向上的梯度方向變化。參數設定上,當 w 高於門檻值且 q 值介於 0.5 至 1 之間時,即視為路肩點。 𝐴 = [𝐺𝑥 2 𝐺 𝑥𝐺𝑦 𝐺𝑥𝐺𝑦 𝐺𝑦2 ] 式 2-1 𝑤 = 𝜆1𝜆2 𝜆1+ 𝜆2 = 𝑑𝑒𝑡(𝐴) 𝑡𝑟𝑎𝑐𝑒(𝐴) 式 2-2 𝑞 = (𝜆1− 𝜆2 𝜆1+ 𝜆2) 2 = 4 ∙ 𝑑𝑒𝑡(𝐴) 𝑡𝑟𝑎𝑐𝑒(𝐴)2 式 2-3
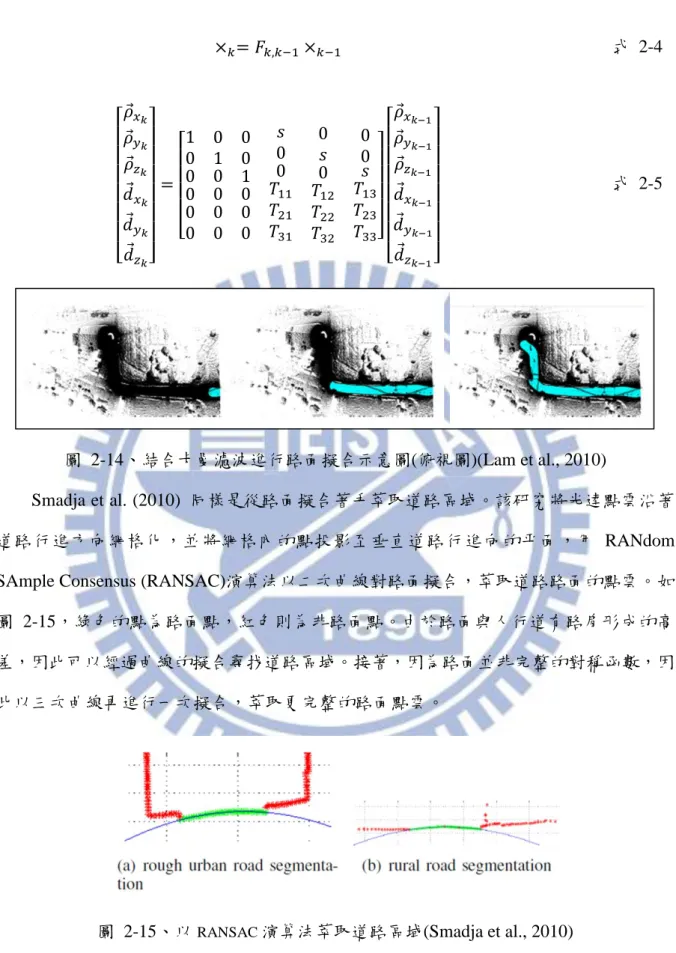
圖 2-12、Förstner 運算子萃取路肩點(Ibrahim and Lichti, 2012) 除了上述以路肩點獲取道路的方法之外,亦可從道路面的幾何特徵為出發點萃取道 路。一般而言,道路面並非完全平坦的水平面,圖 2-13 所示,俯視圖中的紅線段與藍 線段分別為道路的縱向與橫向剖面位置,橫向剖面圖(b)展示路面是有弧度的曲面。圖(c) 為縱向剖面,雖為平坦路面的,但如果有地形的起伏,路面也有逐漸上升或下降的情形。 因此,路面幾何可作為一個幾何特徵,萃取道路區域。 (b) (a) (c) 圖 2-13、道路面之俯視、橫向剖面與縱向剖面圖 基於道路面的幾何特徵,Lam et al. (2010)以區域成長進行局部的路面擬合,並利用 卡曼濾波(Kalamn Filter)推估下一個平面的中心位置與法向量,以因應路面幾何的變化萃 取道路區域。整個方法的模型可以式 2-4 表示。×為包含平面的中心位置與法向量之矩 陣,k 則為編號;𝐹則是轉換矩陣,其式 2-4 各矩陣的內容如式 2-5 表示。式 2-5 中,T 為旋轉矩陣、𝜌 𝑘為平面中心、𝑑 𝑘為方向向量。方法上,需人工給定初始的平面參數,便 可經由卡曼濾波由×𝑘−1預估獲得下一個局部平面×𝑘的參數。整個路面擬合的情況如圖 2-14 所示。
×𝑘= 𝐹𝑘,𝑘−1×𝑘−1 式 2-4 [ 𝜌 𝑥𝑘 𝜌 𝑦𝑘 𝜌 𝑧𝑘 𝑑 𝑥𝑘 𝑑 𝑦𝑘 𝑑 𝑧𝑘] = [ 10 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 𝑠 0 0 𝑇11 𝑇21 𝑇31 0 𝑠 0 𝑇12 𝑇22 𝑇32 0 0 𝑠 𝑇13 𝑇23 𝑇33] [ 𝜌 𝑥𝑘−1 𝜌 𝑦𝑘−1 𝜌 𝑧𝑘−1 𝑑 𝑥𝑘−1 𝑑 𝑦𝑘−1 𝑑 𝑧𝑘−1] 式 2-5 圖 2-14、結合卡曼濾波進行路面擬合示意圖(俯視圖)(Lam et al., 2010) Smadja et al. (2010) 同樣是從路面擬合著手萃取道路區域。該研究將光達點雲沿著 道路行進方向網格化,並將網格內的點投影至垂直道路行進向的平面,用 RANdom SAmple Consensus (RANSAC)演算法以二次曲線對路面擬合,萃取道路路面的點雲。如 圖 2-15,綠色的點為路面點,紅色則為非路面點。由於路面與人行道有路肩形成的高 差,因此可以經過曲線的擬合尋找道路區域。接著,因為路面並非完整的對稱函數,因 此以三次曲線再進行一次擬合,萃取更完整的路面點雲。
2-3 道路標記
道路標記在此定義為車道上所繪製的線段與圖案,其目的以告知駕駛必要的交通資 訊。萃取道路標記所使用的幾何特徵通常是線段的寬度、形狀、圖形特徵等。輻射特徵 則是指道路標記與其他材質之物體輻射強度或顏色上的差異。拓樸資訊則是指標記之間 排列的關係。空間資訊是指道路標記與非道路標記之關係。由於空載光達以地形重建為 標的,點雲密度較稀疏,不適用於細緻道路標記萃取。本節將以影像資料與車載光達兩 種資料型態介紹萃取的方法。2-2-1
影像資料
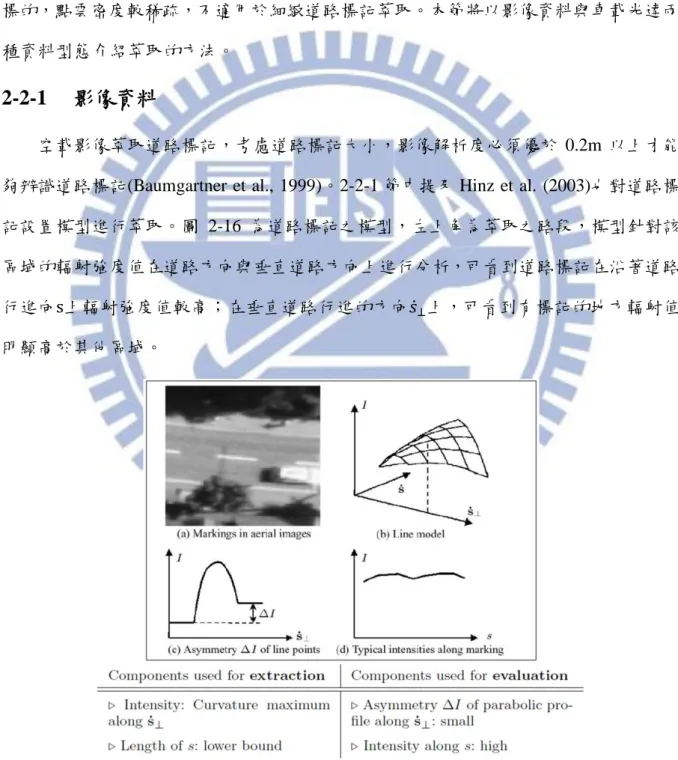
空載影像萃取道路標記,考慮道路標記大小,影像解析度必須優於 0.2m 以上才能 夠辨識道路標記(Baumgartner et al., 1999)。2-2-1 節中提及 Hinz et al. (2003)也對道路標 記設置模型進行萃取。圖 2-16 為道路標記之模型,左上角為萃取之路段,模型針對該 區域的輻射強度值在道路方向與垂直道路方向上進行分析,可看到道路標記在沿著道路 行進向s上輻射強度值較高;在垂直道路行進的方向𝑠̇⊥上,可看到有標記的地方輻射值 明顯高於其他區域。除了航照影像外,由行動測繪系統(Mobile Mapping System)所拍攝的近景照片也可 以做為萃取道路標記的資料。 Cheng et al. (2008)在研究中開發一套系統 ARVEE (Automated Road Geometry Vectors Extraction Engine),自動化萃取影像中的道路標記, 並將得到的道路標記儲存成向量資料。
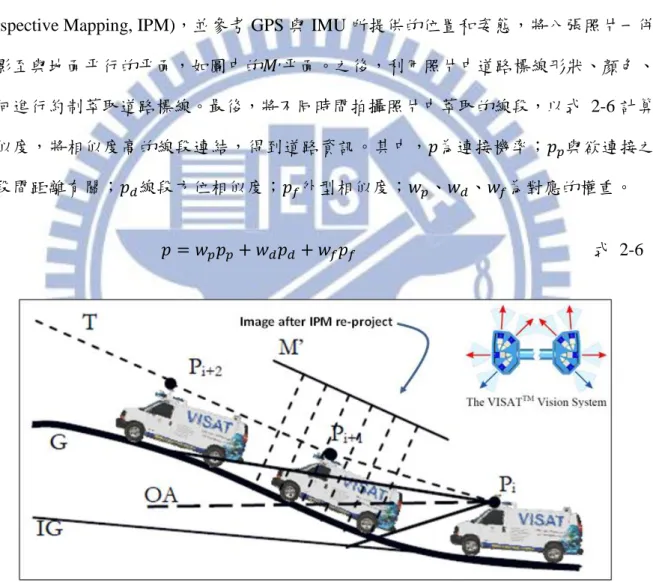
測繪車所搭載的相機如圖 2-17 右上角的圖,左右各有四台相機朝不同方向拍攝。 為了能夠整合同一時間所拍攝的八張照片,研究將各照片以逆透視映射法(Inverse Perspective Mapping, IPM),並參考 GPS 與 IMU 所提供的位置和姿態,將八張照片一併 投影至與地面平行的平面,如圖中的𝑀,平面。之後,利用照片中道路標線形狀、顏色、
幾何進行約制萃取道路標線。最後,將不同時間拍攝照片中萃取的線段,以式 2-6 計算 相似度,將相似度高的線段連結,得到道路資訊。其中,𝑝為連接機率;𝑝𝑝與欲連接之
線段間距離有關;𝑝𝑑線段方位相似度;𝑝𝑓外型相似度;𝑤𝑝、𝑤𝑑、𝑤𝑓為對應的權重。
𝑝 = 𝑤𝑝𝑝𝑝+ 𝑤𝑑𝑝𝑑+ 𝑤𝑓𝑝𝑓 式 2-6
2-2-2
車載光達
光達點雲根據物體材質不同,回波強度也會有所差異。表 2-3 為不同物體對應的回 波強度值,瀝青與水泥材質的道路回波強度大約在 1 至 100,道路標記在 100 至 300 之 間,植物則是在 300 以上。因此道路標記與瀝青或是水泥道路有明顯的對比。另外,車 載光達資料提供高密度的點雲,因此將點雲網格化後可產生較細緻的回波影像,對於十 公分等級大小的道路標記也能夠清楚地描繪,因此車載光達可用於萃取道路標記。 表 2-3、各物體之回波強度值(Yang et al., 2012) 利用點雲萃取道路標記相關研究中,Cheng et al. (2008)首先尋找可能為道路標記的 點雲,再利用幾何特徵與拓樸資訊萃取道路標記。如圖 2-18 所示,左上角為原始點雲, 首先濾除道路區域以外的點,再將回波強度較強的點保留。接著,將高程近似於路面的 點雲視為可能為道路標記的點,剔除與路面高程差異太大的點雲。一般而言,道路標記 的幾何特徵多以線段為主,因此,接著辨別每組點群圍成的形狀,找出幾何形狀為線段 的點群。式 2-7、式 2-8 分別計算點群的偏心率與面積-最小方框比,求得點群的形狀。 最後,考慮道路上的道路標記應都沿著道路行進方向排列,因此使用以 Progressive Probabilistic Hough Transform (PPHT)萃取在路中排列在同一線段上的道路標記。𝑒 =√𝑎2+ 𝑏2
𝑎 式 2-7
𝑟𝑎𝑡𝑖𝑜 = 𝐴𝑟𝑒𝑎
圖 2-18、以高程與回波強度萃取道路標記點雲(Yang et al., 2012)
第3章 研究方法
3-1 研究流程
研究方法可分為萃取道路區域(Road Region)與道路標記(Road Marks)兩部分。點雲 提供的三維點座標能夠描繪道路路面在空間中的三維幾何特徵,因此研究中使用點雲萃 取道路區域。道路標記可視為道路面上的二維圖形,在此以點雲的回波強度產生回波影 像,以影像處理的方式萃取道路標記。 研究中以資訊相互回饋的方式提升實驗成果。資訊回饋是指將道路區域以及道路標 記所萃取的成果,作為彼此之間的約制條件或是使用資料,以提升實驗的成果。本研究 之步驟如下圖 3-1,分為點雲資料切割、萃取白虛線與斑馬線、道路區域萃取以及道路 標記萃取四個步驟。實線方框內的步驟使用的資料為點雲;虛線框內的步驟則是使用回 波影像。首先使用載具的軌跡資料計算道路中心線,並以此為依據將原始光達點雲沿著 道路行進方向做切割。接著,利用切割後的點雲資料產生回波影像,偵測路段的車道線。 之後,以車道線成果推估道路的邊界位置,使用三次多項式擬合邊界內的點雲,以剔除 非路面點,獲得道路區域的點雲-車道點。接著,利用上一步驟萃取之點雲產生回波影 像,以影像匹配的方式辨識其餘的道路標記的種類。圖中,紅色線段表示用以資訊回饋 的資料;灰色方框則是透過該流程萃取的最終產品。 本章節研究方法的架構如下: 3-1:研究流程之介紹。 3-2:道路中心線與資料切割方法之介紹。 3-3:萃取車道線方法之介紹。 3-4:萃取道路區域方法之介紹。 3-5:萃取道路標記方法之介紹。 3-6:驗證分析與精度評估。
3-2 點雲資料切割
處理車載光達必須計算大量點雲資料(Pu et al., 2011),考慮處理大量的點雲資料會 降低運算的效能,所以在萃取道路資訊之前,先以車載光達的軌跡資料計算中心線,得 到道路的行進方向後,沿著該方向將點雲資料切割成「路塊(Road Parts)」以便後續批次 的處理。3-2-1
計算道路中心線
研究中從車載光達提供的軌跡獲取載具在掃描時的路線。一般而言,光達在掃描路 段的方式是於路段中的對向車道來回掃描,因此同一路段中,有載具掃描的兩個軌跡。 由於軌跡是經由 GPS 及 INS 計算載具在某時刻下的點位置,其取樣頻率高,時間間隔 短則提供的資料點距離近,為避免處理過多重複或距離過近的點,因此軌跡檔先經過重 新取樣後再進行中心線的計算。 計算中心線的方法上,先以其中一條軌跡為基準,逐一對每個點沿著路方向在對向 車道的軌跡展開一個沿著道路方向的環域。接著,將對向軌跡落在環域內軌跡點相加取 平均,再與原為基準的軌跡點取平均,最後得到道路的中心位置。如圖 3-2,紅色為原 始軌跡資料,綠色為求得的道路中心線。 圖 3-2、車載光達軌跡檔3-2-2
資料切割
資料切割主要目的在於避免一次處理大量點雲資料,研究中將全區的資料在平面方 向上沿著道路中心線切割成「路塊」,並以測繪車 GPS 的天線為原點,保留特定高程的 點雲,將建物、樹等非道路的點濾除低資料量。 平面部分,依照市區道路及附屬工程設計規範(內政部營建署,2009),在市區的主 要道路其車道數必須要有兩條以上,又主要道路每一汽車道寬度應以 3.5 公尺為原則, 最小不宜少於 3 公尺。因此研究中,以中心線的平面位置為基準,將左右 4 個車道的寬 度以外的點濾除,另外每 50 公尺長的路段切割成一個路塊,並前後增加 5 公尺的重疊 區;高程部分,以圖 3-3 為例,車載光達之座標系統是以 GPS 中心為原點,從該原點 作為起算點至地面的距離約為 1.664m。因此高程方面以車載光達原點向下起算保留在 1.5m 至 2.5m 之間的點雲,以粗略的濾除非路面點。切割後的成果如圖 3-4,圖(a)與圖 (b)分別為平面與高程示意圖,白色部分為原始點雲,橘色部分為切割後的點雲。圖 3-3、Riegl VMX-250 BODY coordinate system (引用自 Riegl user's manual)
(a) (b) 圖 3-4、資料分割示意圖
3-3 萃取白虛線與斑馬線
白虛線與斑馬線的形狀為長條的矩形,外型較簡單,因此研究先對這兩類的道路標 記進行萃取。首先,人工給定車道線的數量與起始白虛線的位置,接著以形狀幾何萃取 白虛線(或斑馬線),最後以拓樸資訊將白虛線連結成車道線。各階段獲取的階段性成果 如圖 3-5。 圖 3-5、車道線萃取階段性成果示意圖 細部的流程如下圖 3-6,首先將資料切割後的點雲網格化產生回波影像,並用 Canny Edge Detection(Canny, 1986)萃取回波影像中的邊緣線得到線段點,接著將相鄰的線段點 連結,合併成同一個物件,圖 3-7 左下角所示。Canny Edge Detection 得到的線段點已 被連結成物件,不同的顏色代表不同的物件。之後以形狀幾何約制萃取白虛線。形狀幾 何包括面積、線段長、面積周長比。研究中依據白虛線繪製的規範設定門檻值,將非白 虛線物件濾除,留下可能為白虛線的物件,圖 3-7 右下角即為濾除後的成果。而斑馬線 與白虛線的形狀類似,因此萃取斑馬線時,依照斑馬線繪製的規格改變參數即可。萃取白虛線後,連結白虛線可獲取車道線的資訊。車道線的功用為分離車道。車道 線為道路標記之集合,當一路段中之道路標記其功用包含分離車道之功能,且該標記與 其餘標記在同一條曲線上沿著道路方向排列,則可歸類為同一個車道線。車道線多由白 虛線、白實線與雙白實線之集合組成,其中又以白虛線數量較多,故研究中,將連結白 虛線,得到車道線的資訊。 作業前,使用者必須依據實際的車道線數量,在每一個車道線上給定一個白虛線的 初始位置。如此便可獲取車道線的數量,以及可靠的車道線與道路中心線之距離。以人 工給定的初始值,做為良好的起始資訊,以利後續自動化作業。 方法上,首先藉由計算各個初始白虛線與道路中心線在平面的垂直距離,將其餘的 白虛線分類到所屬的車道線上。圖 3-8 所示,藍點為人工給定的初始白虛線位置,綠線 為道路中心線。Distance_initial 與 Distance_lane 分別為初始白虛線與未分類的白虛線到 道路中心線的垂直距離。當 Distance_lane 與 Distance_initial 之差值小於半個車道寬,且 該白虛線與初始值距離中心點距為最小者,便將該白虛線分類至該車道線(如紅框之白 虛線),並且做為偵測下一個白虛線之初始值,如此疊代計算至完成搜尋為止。 此外,同一條道路車道數量可能會改變,因此當車道數量改變時,便重新以人工的 方式給定初始值,再進行計算。 圖 3-8、白虛線分類至車道線示意圖
3-4 道路區域萃取
本步驟使用點雲資料、道路中心線以及車道線萃取道路區域內的點雲,並剔除非路 面點,得到道路區域的三維資訊。研究中,首先將資料進行網格化,搜尋每個網格中的 最低點以高程概略濾除非路面點,得到路面點的候選點。接著利用車道線推估道路路肩 的位置,經由搜尋路肩的高差推估道路邊界。最後,基於道路路面為一曲面的特性,以 三次多項式擬合道路面,濾除非路面點得到路面點雲。在研究中,點雲資料經過判斷道 路型態後,可分成一般路段、十字路口,兩種狀況進行處理,其處理的方法有些許的差 異,將在以下做各別的說明。道路區域萃取各階段的成果如圖 3-9 所示。 圖 3-9、道路區域萃取階段性成果示意圖3-4-1
一般路段
一般路段的方法流程如下圖 3-10。為了因應道路在行進方向上有高程的起伏,加 上避免處理大量的資料,因此在前面章節對全區資料進行切割之後,萃取道路區域前, 將點雲資料在道路行進方向上做一維的網格化,並以高程門檻再做一次點雲的濾除。圖 3-11 為網格化的示意圖,網格化的間距為 1 公尺。 圖 3-10、一般道路萃取流程圖圖 3-11、光達點雲網格化示意圖 完成網格化後,在每一個網格內搜尋最低點,並以最低點為基準設定一個高程門檻 值,當該網格內的點雲與最低點的高差低於門檻值,則將該點保留,反之則剔除。判斷 的公式如式 3-1 至式 3-3。𝑝𝑖表示為點雲,點雲內容包含三維座標與回波強度值。網格 化後的資料則由式 3-2 表示,𝑆代表一個網格內所包含的點雲,𝑁表示網格內點雲總數。 以最低點濾除雜訊的則如式 3-3,𝑝𝑚𝑖𝑛𝑧是該網格內的最低點高程,當該網格內的點雲之 高程值與𝑝𝑚𝑖𝑛𝑧差小於𝑇ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑𝐻,該點便納入𝑆𝑔𝑟𝑜𝑢𝑛𝑑的集合中。 𝑝𝑖 = (𝑥, 𝑦, 𝑧, 𝑖) 式 3-1 𝑆 = {𝑝1, 𝑝2, 𝑝3⋯ 𝑝𝑁} 式 3-2
𝑆𝑔𝑟𝑜𝑢𝑛𝑑 = {𝑝𝑖 ∈ 𝑆 ∶ 𝑝𝑖𝑧− 𝑝𝑚𝑖𝑛𝑧 < 𝑇ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑𝐻} 式 3-3 接著,研究中匯入車道線的資料,以該路塊中白虛線數量判斷該道路的種類。當任 一條車道線中的白虛線數量大於 4 條,或任兩條車道線白虛線皆大於 3 條時,則該路塊 視為一般路段。以圖 3-11 的路塊為例,可被歸類為一般路段。如果不滿足上述的判斷 則被歸類為十字路口。 完成路塊種類的辨識之後,一般路段便進行路肩位置的搜尋,以獲取道路邊界。路 肩如圖 2-10 所提及,路肩為車道與人行道之間的高差,因此在搜尋路肩位置時,利用 道路最外側的兩條車道線,各向道路外側平移一個車道的距離(可視情況改變平移距離), 並以此線為中心,在一個車道的範圍內搜尋路肩的位置,如圖 3-12 所示。 圖 3-12、車道線平移之示意圖 本研究以偵測高差獲得路肩位置,由於點雲高程的粗差影響量不大,故研究使用平 均值計算單位網格的高程。首先搜尋範圍中的最低點,並以此為基準在剖面方向上左右 各 30 公分的範圍內,以每 2.5 公分的網格大小計算當中點雲高程平均值,圖 3-13 為點
雲的圖 3-12 中的點雲剖面圖,圖中的綠點為偵測到的最低點,紅點該網格中高程平均 之後的點雲。研究中,沿道路中心往路邊方向計算網格間的平均高程的高差,當高差小 於-0.05 公分時,便視為是路肩的位置。圖 3-14 為路肩點萃取成果。
圖 3-13、路肩位置萃取示意圖
接著,將每個網格得到的路肩點,以最小二乘法擬合路肩點,求得道路的邊界。路 肩線段的方程式以及觀測方程式如下: 𝑝𝑖𝑦 = 𝑎𝐿𝑝𝑖𝑥2+ 𝑏 𝐿𝑝𝑖𝑥+ 𝑐𝐿 式 3-4 𝐴 = [ 𝑝1𝑥2 𝑝 1𝑥 1 𝑝2𝑥2 𝑝 2𝑥 1 ⋮ 𝑝𝑘𝑥2 𝑝 𝑘𝑥 1] 𝑋𝑇 = [𝑎 𝑏 𝑐] 𝐿𝑇=[𝑝1 𝑦 𝑝2𝑦 … 𝑝𝑘𝑦] 式 3-5 其中,A 為設計矩陣;未知數矩陣為 X;L 為觀測量矩陣;𝑎𝐿、𝑏𝐿、𝑐𝐿為二次函數 之係數;𝑝𝑖𝑥、𝑝𝑖𝑦則是路肩點的平面座標。求解的過程中,權矩陣設為等權的單位矩陣, 由最小二乘平方法求解, X 中的未知數可由式 3-6 求解而得。研究中會在求解之後, 剔除大於兩倍中誤差的觀測量,再進行一次解算,以獲得更準確的數據。 𝑋̂ = (𝐴𝑇𝑃𝐴)−1𝐴𝑇𝑃𝐿 式 3-6 得到道路邊界之曲線後,接著進行路面擬合。首先利用道路邊界線,濾除邊界以外 的點,保留邊界內的點雲。接著將網格內的點雲投影到該網格在道路行進方向的垂直平 面上後,以三次曲線進行路面的擬合,濾除非路面點,獲得道路區域的點雲,圖 3-15 為投影之後點雲的分布,橘色的線段為擬合的路面。路面點雲擬合的方式同樣使用最小 二乘法求解,參數如式 3-7、式 3-8。 圖 3-15、網格內點雲投影與路面擬合示意圖
𝑝𝑖𝑦 = 𝑎𝑝𝑝𝑖𝑥3+ 𝑏 𝑝𝑝𝑖𝑥2+ 𝑐𝑝𝑝𝑖𝑥+ 𝑑𝑝 式 3-7 𝐴 = [ 𝑝1𝑥3 𝑝1𝑥2 𝑝1𝑥 1 𝑝2𝑥3 𝑝 2𝑥2 𝑝2𝑥 1 ⋮ 𝑝𝑘𝑥3 𝑝𝑘𝑥2 𝑝𝑘𝑥 1] 𝑋𝑇 = [𝑎 𝑏 𝑐 𝑑] 𝐿𝑇=[𝑝1 𝑦 𝑝2𝑦 … 𝑝𝑘𝑦] 式 3-8 擬合後,計算道路邊界內的點雲與曲線的距離,將距離超過門檻值的點視為非路面 點濾除之。研究中,該門檻為 Point-to-curve 門檻,如式 3-9。由於道路接近路肩部分設 置的排水設施可能使路面形成一段水平的平面,造成在路肩周圍的路面無法完好的被擬 合,因此在門檻值設定上,放寬接近路肩路面的門檻值以避免濾除正確的路面點。而門 檻值最小值與路面的高程設計有關,根據道路設計,市區道路路面的縱向坡度與速限有 關,因此研究中,參考測區路段的速限,以對應的坡度值,計算在網格內的路面最大高 程差,取其一半作為門檻的最小值。以速限為每小時 40 公里為例,所對應的縱坡度為 10%,因此在 1 公尺的網格大小下,門檻的最小值應為 5 公分 𝑇ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑 {0.05𝑚 × 𝐶𝑜𝑒𝑓𝑓 𝑖𝑓 𝑡ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑 > 0.05𝑚0.05𝑚 𝑖𝑓 𝑡ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑 < 0.05𝑚 𝐶𝑜𝑒𝑓𝑓 = 2.0 × (1 −點到邊界距離 1/2 路寬 ) 式 3-9
3-4-2
十字路口
十字路口或 T 字型路口,屬於不同道路的交會處,因此在該區域並沒有所謂的道路 邊界。但是為了保持整條路段的完整性,在此利用十字路口前後路段偵測到的路肩點推 估十字路口的邊界,解決邊界的問題。從圖 3-16 中,十字路口處與相鄰路段的情形與 路肩點的分布。以此為例,便藉由前後相鄰路段的路肩點一併以最小二乘法對邊界線求 解,得到在十字路口的邊界,以便道路區域點雲的萃取。另外,考量十字路口的路長較 長加上行進方向改變,因此以三次多項式進行擬合,因應道路的變化。 圖 3-16、十字路口與相鄰路段之路肩點示意圖3-5 道路標記萃取
萃取道路標記使用道路區域路面點雲、道路標記模型庫以及道路中心線。其中,濾 除汽機車、行人的道路區域點雲可以提供無遮蔽回波影像;道路標記模型庫則是以路面 設計規範建立的資料庫。本步驟中,首先萃取可能為道路標記的物件,接著藉由計算相 似度辨識道路標記之種類。各階段的成果如圖 3-17 所示。 圖 3-17、道路標記萃取階段性成果示意圖 萃取的流程如圖 3-18 所示,前半步驟與萃取車道線的流程相同,藉由邊緣線偵測 與線段點連結偵測可能為道路標記的物件,如圖 3-7 左下圖。接著計算各物件中心位置 與路段主軸方向定位各物件於回波影像上的位置與方位,以影像匹配計算物件與模板的 相似度,辨識道路標記種類。 匹配的過程透過判斷物件中心位置與路段行進方向,將物件對應的回波影像進行二 元化,再旋轉至與模型庫中模板相同的方位,以 SAD(Sum of Absolute Difference)計算 與各個模板的相似度,最後取其最高者視為該物件道路標記種類。3-5-1
道路標記模型庫
本研究道路標記模型庫以指向線為主。圖 3-19 是模型庫中所包含的道路標記,模 型庫中的模板以二元化影像儲存,降低雜訊。另外,在模型庫中的道路標線方位統一指 向正北,以此作為基準,將不同方位的物件轉至與模板相同的方位,計算相似度。 圖 3-19、道路標記模型庫之模板3-5-2
計算物件中心點與路段主軸方向
道路標記的繪製方向會隨著道路行進方向改變,因此計算相似度時,必須先將各個 物件旋轉至正北,再進行相似性計算。此外,種類相同的道路標記在對向車道,其角度 相差180°,因此除了判斷道路行進的方向之外,也要確認物件所在的車道位置,以確保 旋轉的角度是正確的。圖 3-20 為道路標記繪製的位置與旋轉角度之示意圖,圖中綠色 線段為道路中心線,紅色與黃色的方框為不同種類的指向線。由圖顯示,道路標記沿著 道路中心線之方向所繪製,並且在中心線兩側道路標記的方向相差180°。圖 3-20、對向車道對道路標記方向影響之示意圖 研究中使用直線方程式擬合道路中心線,得到中心線的斜率,再利用正切函數換算 成旋轉的角度,如式 3-10。其中,𝑎𝐿與𝑏𝐿為線型函數之係數,𝑎𝐿為線段之斜率;𝑡𝑟𝑎𝑗𝑥、 𝑡𝑟𝑎𝑗𝑦為軌跡的平面 x、y 座標;𝜃則為線段與 x 軸之夾角,值域範圍在0°~180°之間。 𝑡𝑟𝑎𝑗𝑦 = 𝑎𝐿𝑡𝑟𝑎𝑗𝑥+ 𝑏𝐿 𝜃 = tan−1𝑎 𝐿 式 3-10 物件旋轉的判斷的公式如式 3-11。F(𝑥, 𝑦)為式 3-10 中求得的中心線函數,當物件 的中心點座標(𝑐𝑥, 𝑐𝑦)帶入方程式得到的值大於零時,旋轉角度為-(𝜃 − 900);小於零表 示在對向車道,因此旋轉角度為−(180°+ (𝜃 − 900));當值等於零時,表示中心點在線 上,一般而言,道路標記不會繪製在道路中央,因此將該物件判定為非道路標記剃除之。 F(𝑥, 𝑦) = 𝑎𝐿𝑥 + 𝑏𝐿− 𝑦 𝑖𝑓 𝐹(𝑐𝑥, 𝑐𝑦) > 0 Rotate angle =(𝜃 − 900) 𝑖𝑓 𝐹(𝑐𝑥, 𝑐𝑦) < 0 Rotate angle = 180°+(𝜃 − 900) 式 3-11
物件旋轉的示意圖如圖 3-21。圖(a)為道路標記模型庫中之模板,綠色線段為道路 中心線,𝜃則為線段與 x 軸之夾角,模板的旋轉角如圖為-(𝜃 − 900)。研究中,將道路標 記的位置代入中心線函數F(𝑥, 𝑦)時,其值大於零,則表示道路標記在中心線的右側,因 此模板旋轉角度為-(𝜃 − 900)。反之,當𝐹(𝑐 𝑥, 𝑐𝑦)值小於零時,表示標記在中心線的左側, 旋轉的角度需再加上-180°。 (a) (b) (c) 圖 3-21、道路標記旋轉示意圖
3-5-3
影像二元化與 SAD 影像匹配
影像二元化之目的是降低雜訊對匹配造成的影響,本研究計算相似度之前,首先將 影像中線段圍成的區域用白色填滿,其餘的部分則為黑色。如圖 3-22 所示,左邊為回 波影像,中間為萃取之後得到的物件輪廓,右邊則為完成二元化的成果。 圖 3-22、回波影像二值化示意圖相似度的計算是藉由計算兩張影像之間像元的差異,給予一個相似性的指標,以判 斷兩張影像的相似程度。由於道路標記形狀單純,計算特徵評估相似度,如尺度不變特 徵轉換 (Scale Invariant Feature Transform, SIFT)等方法,其成果受限於資訊不足而缺乏 辨識能力。另外,本研究為能提升運算的效能,相較於標準化互相關法(Normalized Cross-Correlation, NCC),SAD (Sum of Absolute Difference)運算速度較短,故使用 SAD 作為匹配的方法,計算物件與模板間的相似度。 計算過程將影像中白色像元的值設為 1,黑色像元則為零,並且計算各個像元間的 差值取絕對值後相加,最後除以視窗像元的總個數獲得相似性的指標。SAD 的方程式如 式 3-12。其中SAD為相似性指標,值域範圍為 0~1 之間,越接近 1 相似度越高;𝐼𝐻與𝐼𝑊分別 為影像的大小;I( , )與I ( , )分別是的是模板與物件影像中的對應的像元。 𝑆𝐴𝐷 = 1 −∑ ∑ |I ( , ) − I ( , )| 𝐼𝑊 =1 𝐼𝐻 =1 𝐼𝐻× 𝐼𝑊 式 3-12 圖 3-23、影像大小為 11*11 之 SAD 示意圖