國立交通大學
運輸科技與管理學系
碩 士 論 文
高速公路旅行時間預測-以k-NN法及分群方法探討
Freeway Travel Time Prediction by Using the k-NN Method and
Comparison of Different Data Classification
研 究 生:蔡繼光
指導教授:卓訓榮 教授
高速公路旅行時間預測-以k-NN法及分群方法探討
學生:蔡繼光 指導教授:卓訓榮 博士 國立交通大學運輸科技與管理學系碩士班摘
要
旅行時間預測為先進旅行者資訊系統的一部分,其目的為利用即時的 速度、流量等交通資訊,即時地、準確地預測旅行時間以供用路人、交通 管理人員進行查詢或各種決策分析。對於用路人而言,大多以旅行時間最 小為其決策目標進行路線規劃。然而用路人只能掌握部分的路況資訊,較 難決定旅次之出發時間、並對路徑選擇進行最有效率的決策與預估,降低 運輸行為之不確定性。因此旅行時間預測為智慧型運輸系統中一個重要的 課題。 本研究利用電子收費系統之歷史資訊及高速公路偵測器所收集到的即 時與歷史交通資訊(速度、流量)進行分析。在研究方法上,利用比對的方 法,找出與即時交通資訊類似之歷史交通資訊,再利用電子收費系統之資 訊推估該歷史時間點之旅行時間,進行旅行時間預測。
本研究在資料比對的方法上採用 k-NN 法(k-Nearest Neighbor Method) 進行處理。在資訊比對上。為了進一步提高上述方法的準確率,由單時間 點的比對擴大為,比對一段時間的交通資訊的變化,並考量在不同偵測器 下交通特徵的差異,因此再加入偵測器的權重以進行分析。並討論在不同 的資料分群下,是否可以提升預測準確率。 最後利用台灣國道三號高速公路為對象進行研究,驗證本研究方法是 否有足夠能力得到準確的預測結果。 關鍵詞:k-NN 法,高速公路旅行時間預測,資料分群
Freeway Travel Time Prediction by Using the k-NN Method and Comparison of Different Data Classification
student:Chi-Kuang Tsai Advisors:Dr. Hsun-Jung Cho
Department of Transportation Technology Management National Chiao Tung University
ABSTRACT
Thetravel time prediction is a part of Advanced Traffic Information
Systems, ATIS. It is using the instant speed and flow information to predict the travel time on certain the path. It helps the road user and traffic manager to survey or strategy analysis. Using the travel time information, it is useful for road user to do the trip planning by minimizing the travel time. Without travel time information, it is hard to gather enough information doing the efficient trip planning, nor estimating the travel time. Therefore, travel time prediction is the important issue in intelligent transportation system. It help trip planning and decrease the uncertainty of the trip.
The study uses the historical electronic toll collection, ETC, information and historical and real-time vehicle detector, VD, information, speed and flow, on the freeway. Using the comparison method find out the familiar traffic
information between historical data and real-time data. Then, estimate the travel time of the historical time by ETC data. With the familiar period and estimated travel time predict the real-time travel time.
The study adopts the k-nearest neighbor method, k-NN method, in data comparison. For decreasing the rate of error, instead of comparing each time period compares the traffic information trend to find out the similar data. Besides, we consider the difference between different VDs, and weight the VD data to adjust. Finally, discussing different data classification increases the performance of prediction.
Finally, the study took the third freeway in Taiwan for example. Figure out if the method got enough predicting ability.
誌謝
首先,我要感謝這兩年給與我指導的卓訓榮老師,在這過程中,逐漸 清楚了所謂學術論文的意義,以及做研究的方向,並且在待人處世上也給 與了我相當大的影響及鼓勵,期望在未來的日子裡依然能夠與卓老師維持 良好的互動。接下來要感謝系上的王晉元老師及資財系的周幼珍老師,時 間與精力,幫我找出了論文上的瑕疵以及一些說明不清之處,也謝謝韓復 華老師在期中報告時給了我後續可以研究的方向,讓我有能力將這篇論文 順利完成。也要謝謝系上的老師在這兩年給我的指導與體諒,讓我增進不 少見聞。 另外還要謝謝運研所的葉祖宏先生,在我進行程式的撰寫時,幫我檢 查演算法是否得到正確的結果,並找出程式中的一些問題以助我完全我這 個部分程式,給予我相當大的助力。另外也要謝謝彥佑學長、健綸學長、 黃恆學長、佳儒、如君還有志霖,靠著大家的努力把這個計畫處理完畢, 也讓我可以用來參考而得已做為論文的資料來源。 最後,要謝謝健綸學長、昱光學長、黃恆學長、隊長、帥哥錦、猴給、 Issac、如君和亦晴陪伴我度過綜一 1106 室 730 天的日子(好像沒那麼多), 還要謝謝之音、宜珊還有小捲陪了我 365 天(因為你們走太快了),還有志玲 和怡婷陪我度過學生生涯的最後一年。這一切在壁虎的啾啾聲,還有鍵盤 的答答聲中不知不覺就結束了,讓我在學生的最後兩年有點點滴滴的回 憶。 也要謝謝我的酒肉朋友,帥哥號和蕭宅宅,當我在寂寞、飢餓的時候, 助我一臂之力,帶我離開那種囧境;也要謝謝我的好室友夸克和強翰(號?), 陪我度過無數個夜晚;還有像是老蔣、包子這些其他實驗室的好朋友,願 意串串門子帶來一些新鮮空氣。謝謝大家的幫忙,讓我這兩年的生活沒有 什麼空白。 最後,也是最重要的,要感謝我的父母,願意在我的求學生涯中,給 我無邊無際的支援與支持,讓我能夠勇敢面對所有的問題,所有的難關, 所有的所有,讓我知道我有後盾可以讓我依靠,謝謝你們,在此僅以此篇 論文獻給在我身邊的你們。 蔡繼光 謹 誌于 國立交通大學運管所 中華民國九十八年七月目
錄
中文摘要 ... I 英文摘要 ... II 誌謝 ... III 目錄 ... IV 表目錄 ... VI 圖目錄 ... VII 第一章 緒論 ... 1 1.1 研究背景 ... 1 1.2 研究目的 ... 2 1.3 研究範圍 ... 3 1.4 研究流程 ... 4 第二章 文獻回顧 ... 7 2.1 旅行時間預測相關文獻 ... 7 2.2 k-NN 預測交通資訊相關文獻 ... 13 2.3 小結 ... 16 第三章 資料處理 ... 17 3.1 偵測器資料與 ETC 資料的比較 ... 17 3.2 高速公路偵測器資料 ... 26 3.3 電子收費系統資料 ... 28 3.4 ETC 與 VD 之間關係 ... 31 第四章 旅行時間預測模式介紹 ... 33 4.1 k-NN 介紹 ... 33 4.2 k-NN 參數設定 ... 33 4.3 k-NN 模式建立 ... 37 4.4 本研究所設定之 k-NN 模型 ... 38 4.5 模式預測流程 ... 41
第五章 實例測詴 ... 42 5.1 研究範圍 ... 42 5.2 旅行時間預測結果 ... 45 5.2.1 龍潭收費站到樹林收費站測詴結果 ... 45 5.2.2 後龍收費站到樹林收費站測詴結果 ... 47 第六章 結論與建議 ... 53 參考文獻 ... 54 附錄一 各偵測器信賴區間 ... 58 附錄二 其他 VD 與 ETC 比較結果 ... 67 附錄三 其他預測結果 ... 70 自傳 ... 75
表 目 錄
表 2.1 類神經網路模式之構建類型整理 ... 12 表 3.1 缺漏嚴重之偵測器代碼及缺漏率 ... 26 表 3.2 研究範圍之偵測器代碼及缺漏率 ... 27 表 5.1 臺灣地區國道三號高速公路各收費站通行車輛次數 ... 44 表 5.2 k-NN 模式旅行時間預測整理(970330) ... 51圖 目 錄
圖 1.1 研究流程圖 ... 6 圖 2.1 SVR 示意圖 ... 9 圖 3.1 970121(一)流量與旅行時間對應圖 ... 18 圖 3.2 970122(二)流量與旅行時間對應圖 ... 19 圖 3.3 970123(三)流量與旅行時間對應圖 ... 20 圖 3.4 970124(四)流量與旅行時間對應圖 ... 21 圖 3.5 970125(五)流量與旅行時間對應圖 ... 22 圖 3.6 970126(六)流量與旅行時間對應圖 ... 23 圖 3.7 970127(日)流量與旅行時間對應圖 ... 24 圖 3.8 96 年歷史旅行時間信賴區間圖 ... 28 圖 3.9 歷史旅行時間估計流程圖 ... 30 圖 3.10 偵測器推估歷史旅行時間流程圖 ... 31 圖 3.11 偵測器與 VD 歷史旅行時間推估圖 ... 32 圖 4.1 旅行時間對應常態分配分佈圖 ... 35 圖 4.2 不同 k 值對應誤差圖 ... 36 圖 4.3 差異值說明圖 ... 39 圖 4.4 預測流程架構圖 ... 41 圖 5.1 研究範圍高速公路路線圖 ... 43 圖 5.2 龍潭到樹林依單時間點 k-NN 法旅行時間預測圖 ... 45 圖 5.3 龍潭到樹林依日期別分群旅行時間預測圖 ... 46 圖 5.4 龍潭到樹林依星期別分群旅行時間預測圖 ... 46 圖 5.6 k-NN 模式旅行時間預測圖(970315) ... 48 圖 5.7 k-NN 模式旅行時間預測圖(970316) ... 48 圖 5.8 k-NN 模式旅行時間預測圖(970303) ... 49 圖 5.9 k-NN 模式旅行時間預測圖(970304) ... 49 圖 5.10 k-NN 模式旅行時間預測圖(970305) ... 50第一章 緒論
1.1
研究背景
由於運輸建設方案執行速度永遠不及交通需求之膨脹,當某些時段、 路段交通需求超出道路容量負荷時,就有供不應求的狀況發生,而道路也 就隨之產生了擁擠現象而造成車速下降,甚至造成塞車的發生,而行程的 不確定性就隨之提高。因此為了改善現有的交通問題,在觀念與作法上已 逐漸由增加道路容量的方式轉變成提升利用現有的資源與交通設施的使用 效率為目標,在既有的資源下,達到最大的效率。 有鑑於以上的現象,各國開始著手研究應用電子、資訊、車輛、通訊、 控制等技術配合交通管理與控制策略,以提升交通運輸系統的效率,發展 運輸系統的智慧化。1980 中期以後,歐、美、日等先進國家更投入大量資 源積極發展智慧型運輸系統(Intelligent Transport System, ITS),希望 不僅提高交通系統之運作效率,並且增加駕駛之安全性。我國也持續地針 對智慧型運輸系統進行一連串的計劃,包括運輸政策白皮書(2002)、台灣 地區 ITS 綱要計畫(2003)等。其中先進旅行者資訊系統(Advanced Traffic Information Systems, ATIS)為智慧型運輸系統中的一部分,其作用在於 提供旅行者或是交通管理人員準確的且可信賴的交通資訊。而旅行時間預 測為 ATIS 之中的一個方向,其目的為利用速度、流量等交通資訊,即時地、 準確地預測某一段路徑之旅行時間供用路人、交通管理人員進行查詢以創 造出附加價值,降低運輸行為之不確定性、並進行各種決策分析。 對用路人而言,在行駛至目的地的各種路線選擇下,如何運用有效方 法完成旅次是用路人追求的目標。假設用路人在理性的決策下進行路線規 劃,使用者在進行路線規劃時會考量個人的偏好、態度、知識以及對交通 系統的了解,以追求旅行時間成本最小為目標進行規劃[1]。然而用路人只 能掌握部分的路況資訊,無法針對旅次之出發時間、路徑選擇進行最有效 率的決策與預估。因此 ATIS 的目的為提供可靠且準確的交通資訊,以增加 用路人進行旅次規劃之效率,在效率提高下有以下兩個優點。 1. 節省道路使用者的旅行成本。 有助於道路使用者找尋最短旅行時間之路線選擇以降低旅行時間成本, 並且讓道路使用者選擇其他路線以加速擁塞的抒解以降低因道路擁塞所帶 來的社會成本,進而提高運輸系統之服務水準。2. 有助於減少道路使用者減少不確定性,以增加道路使用者的舒適程度。 由於提供使用者較多資訊可以有助於減少道路使用者對於交通狀況的 不確定性,因此道路使用者可以得到更多的交通資訊以增加舒適程度[2]。 對於交通管理人員,ATIS 有助於進行路網績效評估、控制策略研擬、 駕駛人行為分析等決策應用分析。 我國也持續地對於 ATIS 方面進行發展,行政院於民國 95 年產業科技 策略會議(SRB)[3]中提出「智慧型車輛產業的檢視與前瞻」議題,建議智 慧型運輸系統(ITS)建置「北台灣科技走廊智慧型運輸系統示範區域」。利 用先進感測設施,設計具人工智慧的交通分析系統進行交通控制並以多重 管道資訊傳播系統發佈資訊,其目的在於協助用路人有足夠的資訊在高速 公路及替代道路中進行路線選擇,以避開壅塞而快速到達目的地。因此提 供快速、準確及充分的交通資訊給用路人是各國一直在研討的課題。
1.2
研究目的
路況資訊有很多種類型呈現,如速率、流量、佔有率、事故偵測等, 然而對於用路人而言,如何讓用路人最有效的掌握路況,才是用路人最關 心的交通資訊。用路人可以透過各種管道得到即時的交通資訊,再加上自 己的經驗,自行推估在當時路況下需要多少時間完成目標的旅次。用路人 在知道當時的交通資訊下,不一定有辦法迅速地且準確地預測在旅次進行 過程中是否發生道路擁塞的現象,因此可能出發時交通順暢,但是隨著旅 次的進行,愈來愈多車輛進入道路,而在旅次進行一半時或者在某些路段, 發生道路擁塞的情形。甚至是用路人在沒有足夠的資訊及經驗下,忽略了 其他更快到達目的地的路線。 由於即時的速度、流量等交通資訊只能反應當下的交通狀況,對於用 路人的實際效用可能仍顯不足。因此本研究希望可以研究一種旅行時間預 測的方法有能力即時地預測完成旅次所需要的旅行時間。而目前有相當多 的研究,其旅行時間資料庫都是由歷史的速度、流量等資訊推估的結果, 本研究希望可以建立一組比較有可靠性的歷史旅行時間資料庫,因此利用 高速公路電子收費系統得到車輛通過各收費站的時間以得到實際的旅行時 間資訊。由即時的交通資訊對應歷史資訊預測出在相同的貣迄點下所需要的旅 行時間。在了解每一條路線的旅行時間後,可以鼓勵用路人於道路發生擁 塞前即利用替代道路,除了給與用路人更低旅行成本的路線規劃,也可以 減少道路的負荷,以降低發生擁擠的機會,或加速道路擁塞的抒解,進而 減少塞車所帶來的社會成本。因此提供用路人旅行時間的資訊是有需要 的。 目前在旅行時間預測上有相當多的研究是利用推估現在的交通資訊與 未來的交通資訊之間的關係進行預測,研究當尖峰、離峰;平日、假日; 甚至季節改變下,即時交通資訊與未來交通資訊之間的關係。然而如果當 即時資訊發生不預期的變化時,像是連續假日、晴天、雨天,即時的交通 資訊和未來交通資訊之間的關係都可能和平常的情形不同,而預測的能力 就不一定能夠維持。 未來的資訊和即時的資訊有關聯性,因此在相同的交通情形下,相同 的路段會對應類似的旅行時間長度。本研究希望找出與即時交通現象類似 的歷史交通現象,因此會對應類似的旅行時間,而當有不預期的事件發生 時,如果歷史有類似的交通現象下,就可以得到類似的旅行時間資訊。 本研究將詴著收集即時交通資訊以及建立歷史旅行時間資料庫,並且 利用 k-NN 方式做為本研究之模式進行旅行時間的預測,並詴著提升其準確 率。
1.3
研究範圍
本研究希望可以預測在某一組相同的貣迄點下,各個時間點所可能的 旅行時間,由於目前北台灣的運量較大,交通擁塞發生的機會較大,所以 本研究希望可以有效的預測在交通擁塞下或是交通順暢下,該路段的旅行 時間為何。由於目前我國偵測器密度最高的道路為高速公路,而且可以藉 由電子收費系統(ETC)所收集的資訊,得到在各時間點下,不同收費站之間 所需要的旅行時間為何。結合由偵測器與電子收費系統所收集的資訊,對 交通資訊與旅行時間之間的關係為本研究的研究範圍。 因此本研究將以高速公路為主要的研究對象,並以國號三號上的樹林 收費站到後龍收費站之間的旅行時間為分析對象,利用其間高速公路的偵 測器及電子收費系統(ETC)所蒐集的交通資訊,預測旅行時間,並找出與實 際值誤差最小的方法,以增加預測效率。因此本研究的範圍為以下幾點: 1. 如何從歷史 ETC 的資料校估出實際的歷史旅行時間資訊。 2. 如何從即時的道路資訊與歷史的道路資訊中,預測旅行時間。 3. 如何提升旅行時間預測的績效。
1.4
研究流程
本研究的研究流程如圖 1.1 所示,茲將流程圖中各步驟詳細說明如下: 1. 研究範圍界定 決定實際案例的研究對象以及預測範圍貣迄點,並根據研究背景與 目的將問題進行清楚的描述與界定。 2. 文獻回顧 蒐集國內外研究高速公路旅行時間預測的相關文獻,接著回顧一些 利用 k 最近鄰法(k nearest neighbor, k-NN)法預測交通資訊的相關文獻。 利用既有的研究整理出本研究的研究方向。 3. 將資料進行分群(classification) 利用不同的分群將所蒐集到的歷史資料進行分群的動作,本研究將 研究是否針對資料進行分群可以得到較佳的結果,若沒有經過分群動作, 則可視為每一天為一組樣本進行分群;若以星期別分群,則將歷史與即 時的資料依星期別分群,相同的星期別視為相同的群組。 4. 判斷輸入值為那一個集群(cluster) 若資料有經過分群動作,則即時資訊需要辨別位於那一個分群之中, 因此需要進行集群的動作,依照不同星期別作直觀的分類。需要判斷該 即時資訊位於何種分群下,再進行比對的動作,最後即時資訊與歷史資 料相比對,利用 k 最近鄰法找出最類似的樣本值以預測旅行時間。5. 利用 k-NN 進行旅行時間預測 本研究在進行 k 最近鄰法的比對前,需要找出比對的門檻值,將離 群值刪除,接著決定比對之類似值的數量上限(k),以及相關的參數, 接著利用這些參數的設定以提升 k 最近鄰法的準確率。最後將實際案例 利用分群後,得到分群或不分群的預測結果。 6. 比較這些分群下的績效 在各別預測以上三種分群的結果後,分析這些不同的分群下預測結 果與實際值的誤差值,以判斷不同分群方法的優劣,並討論是否有其他 改進的方法。 7. 結論與建議 對本研究過程與結果提出結論與建議,並提出後續可以進行研究的 方向。
圖 1.1 研究流程圖 [資料來源:本研究整理] 研究範圍界定 文獻回顧 資料處理 利用 k-NN 進行旅 行時間預測 判斷即時資訊為那一個分群 比較不同分群下 的績效 結論與建議 將資料進行分群
第二章 文獻回顧
本研究目的為利用即時交通資訊發展一套旅行時間預測模式,並且利用 k-NN 法進行預測求解。以下將對於旅行時間預測、k-NN 預測交通資訊方法, 以上二種方向整理相關的研究且進行討論,歸納出本研究的預測方法。2.1
旅行時間預測相關文獻
目前高速公路旅行時間預測文獻上,大致可分為有母數方法(parameter) 及無母數(non-parameter)方法這兩種方法。其中有母數方法可以分為以下幾 種:1.迴歸方法(regression),2.時間序列方法(time-series)。以下將分別說明 這兩種方法。 迴歸方法 迴歸分析是統計方法中廣為使用的分析方法,其運用涉足各個領域。 目前迴歸方法運用於旅行時間的預測上,主要以兩個方向為主:1.交通資訊 與旅行時間之間的關係,找出速度、流量、佔有率為輸入資訊,找出與旅 行時間之間的關係。2.不同時間點旅行時間的關係,得到某個時間點的旅行 時間與下一個時間點的旅行時間後,找出之間的關係。以下將分別說明: 1.交通資訊與旅行時間之間的關係 Kwon 等學者(2000) [4]利用美國 I880 資料庫來建立旅行時間預測模式, 資料庫中包含單一線圈偵測器所偵測到的佔有率以及流量資訊,及探針車 所得到的旅行時間,詴著找出交通資訊與旅行時間之間的關係。模式中將 偵測到的流量、佔有率、及當時的星期別及日期都視為一個集合𝑋𝑖,對探 針車得到的實際旅行時間做線性迴歸,最後以平均絕對百分誤差(Mean Absolute Percentage Error, MAPE) 來檢定預測績效。2.不同時間點間旅行時間的關係 Sen 等人(1997)[5]引用美國芝加哥的 ADVANCE 計劃中,討論在某一 些偵測器較少路段下,如何進行旅行時間預測。在這裡利用探針車以收集 道路資訊,蒐集各車輛行駛時所在各路段下旅行時間為何。討論在不同的 日期、不同的月份下,各時間點旅行時間之間的關係,並針對這些迴歸式 的參數值是否具有顯著性進行研究。當某些偵測器充足的路段,則利用路 段長度與平均速率之間的關係推估該路段旅行時間。該研究依照在某路段 上有無佈設偵測器的兩種情況,採用探偵車或是偵測器兩種不同的資訊收
集方式來進行旅行時間預估。最後提出在都市幹道的網路上,受到號誌系 統控制與環境因素之影響下,路段旅行時間之不確定性較高速公路系統來 的複雜。
Rice 等學者 (2004)[6]使 用 線性 迴歸 (linear regression) 、 主 成 份分 析 (principal component)以及最近鄰法(nearest neighborhood)三種方法,各別應 用在 PeMS 計劃中預測旅行時間。其中迴歸方式利用單一線圈偵測器(single loop detector)收集資料,可以得到流量與佔有率的資料,接著利用流量與佔 有率推估出速度,利用上下游兩偵測器之間的距離,及這兩個偵測器附近 的速度資訊,推估當時的旅行時間。利用這些旅行時間建立歷史資料庫, 並推估一套前後時間點旅行時間的線性迴歸方程式,在已知兩偵測器之間 的交通資訊,推估這兩個偵測器間的旅行時間後,預測從第二個偵測器出 發到第三個偵測器間所需要的旅行時間。 此迴歸式分別以時間別及星期別進行分群,最後將以上三種預測方法所 得結果以均方根誤差(Root Mean Square Error, RMSE)來檢定預測績效。
時間序列 由以上迴歸的方法,可以發現迴歸主要的目的是在找一組輸入參數和一 組輸出參數之間的關係,然而在旅行時間上可以發現,各時間點的交通資 訊之間都有關係,因此時間序列的方法主要是從利用多組的資料中,找出 這些樣本之間的關係,再加入一些變異數以預測旅行時間,因此時間序列 方法可說是利用多組輸入資訊以推估一組輸出值的方法,其中主要有兩個 方 法 , 1. 自 我 迴 歸 平 均 整 合 (Autoregressive Integrated Moving Average, ARIMA)。2.支持向量機迴歸(Support Vector Machine Regression, SVR)。 1. 自我迴歸平均整合 Yang 等人(2006) [7]把時間序列模式應用在幹道的旅行時間預測研究上。 透過實際採用裝有 GPS 系統的探針車於美國明尼蘇達州 194 號高速公路作 實際研究。其方法是將蒐收所得資料視為時間序列,以 ARIMA 模式進行旅 行時間預測。對明尼蘇達 194 號高速公路作實測,結果顯示此方法能夠有 效預測短期內的旅行時間。
2.支持向量機迴歸
支 持 向 量機 迴 歸 (support vector machine regression, SVR)方 法 是 由 Vapnik’s(1997)[8]提出,主要應用於時間序列的預測上。
Wu 等人(2004)[9]嘗詴將其運用在旅行時間預測上,利用中研院的 ITWS 計 劃在國道一號高速公路上選取一公里的範圍作 9 為研究對象,以迴圈偵測 器(loop detector),將所收集到的道路速度資訊,建立每三分鐘一筆的歷史 資料庫。最後使用以下三種方法:支持向量機迴歸(support vector machine regression)法、當前旅行時間預測法(current travel time prediction method)以 及歷史平均旅行時間預測法(historical mean prediction method)來預測旅行時 間。並比較三種旅行時間的推估方法:
A. Support vector regression(支持向量機 )
利用所收集到交通資料得到在不同時間下旅行者所花的旅行時間, 先將有這些樣本資料經過轉換得到Φ(x) ,再詴著找出利用一條分隔線, 將具有相似特徵資料視為同一分群,最後找出該分群中交通資料與旅行 時間之間的關係。因此在不同的分群中,需要建立不同的旅行時間預測 推估模式。 圖 2.1 SVR 示意圖 [資料來源:Wu 等人(2004)[9]]
B. current travel time prediction method
收集即時的交通資料,以及各偵測器間的距離,並考慮資料傳遞的 延誤後,預測所需要的旅行時間,預測函式如下式所示。利用該旅行時 間預測函數,直接由速率預測旅行時間。 𝑇 𝑡, ∆ = 𝑥𝑖+1 − 𝑥𝑖 𝛾(𝑥𝑖, 𝑡 − ∆) 𝐿−1 𝑖=0 ω × Φ x + b = 0 分隔線函數為
∆:資訊延誤
(xi, t − ∆):實驗的路段長度
γ(xi, t − ∆):進入路段的速率
C. historical mean prediction method
收集歷史各時間下旅行者所花的旅行時間資料,代入下式後,得到 一組在不同時段下的旅行時間估計函數,利用平均的歷史旅行時間預測 未來的旅行時間。 𝑇 𝑡 = 1 𝑤 𝑇(𝑖, 𝑡) 𝑤 𝑖=1 w:資料收集的星期數;𝑇(𝑖, 𝑡):不同星期所收集的旅行時間 以上的方法主要是根據偵測器所收集的旅行時間樣本資料做分析,由於 偵測器每三分鐘更新一次,所以造成資料有中斷或是錯誤的現象發生,因 此將有效的資料收集後,再根據不同的估計方法預測旅行時間的長度。
而在績效評估上,以均根差(root mean error, RME)和均方根差(root mean square error, RMSE)來評估績效。比較後認為 SVR 有較佳的績效。以上的方 法主要是根據偵測器所收集的旅行時間樣本資料做分析,由於偵測器每三 分鐘更新一次,所以造成資料有中斷或是錯誤的現象發生,因此將有效的 資料收集後,再根據不同的估計方法預測旅行時間的長度。 除了以上的母數方法外,另外還有無母數方法以預測旅行時間,而無母 數方法主要可以分為以下三種:1.類神經網路(ANN)方法,2.模擬方法, 3.k-最近鄰(k-NN)方法。以下將分別介紹以上三種方法。
類神經網路法 Yoshikazu 等人(1998)[10] 利用架設在路段的 AVI 系統蒐集車輛資料, 應用混合式類神經網絡方法解釋每個路段的旅行時間與整個路徑的旅行時 間之間的關係。而國內相關文獻有李季森(2001)[11]探討國內高速公路駕駛 人變換車道行為與變換車道時間,進而研究於不同預測時間、流量、探針 車混合比例與區段長度等相關參數之實驗組合,並透過類神經網路進行旅 行時間之預測。張修榕(2001)[12]透過類神經網路模式來進行雙階段高速公 路旅行時間之預測。針對感應線圈偵測器可蒐集車流速度及流量的特性, 利用模擬的方式產生所需之交通資料並作驗證;接著是預測部分,採用倒 傳遞(feed-forward back propagation)類神經網路模式來建立不同車流型態下 之旅行時間預測模式。黃裕文(2003)[13]以微觀的角度探討國內高速公路施 工路段的車流變化,同樣以上述的方法建立旅行時間預測模式。溫志元 (2002)[14]係針對高速公路進口匝道匯流路段之變換車道行為與加速車道變 換車道匯入主線行為動機與條件進行界定,透過類神經網路進行旅行時間 預測。此外,路段線形(Road Profile)亦可能造成旅行時間之推算誤差,林士 傑(2001)[15]以中華顧問工程司交通千里眼(e-traffic)所提供之即時交通播報 資訊,再加上高速公路幾何、交通量調查與客運車輛 GPS 等資料,運用類 神經網路準確預測高速公路旅行時間,來供用路人參考以降低不確定性。 鑒於國內偵測器普遍設置不足,吳佳峰等人(2001)[16]希望透過 GPS 車輛歷 史旅行資料預估車輛旅行時間,為了能夠正確預估車輛旅行時間,該研究 設定了車輛運行路線分段以及車輛歷史旅行資料劃分時段之準則。近年來 有許多研究利用多項偵測單元進行資料融合,藉以提升旅行時間推算之準 確率,如李穎(2002)[17]融合國道客運班車 GPS 資料、車輛偵測器資料、事 件資料等真實資料,以類神經網路法尋找各項資料來源其參數與旅行時間 之關係。張慶麟等人(2002)[18]以 AVI 方式針對高速公路平常日之車流情形, 先行應用車流模擬方式考量不同資料輸出時距、偵測器佈設間距及 AVI 辨 識率等產生相關資料,配合簡單指數平滑法、Holt’s 指數平滑法、ARIMA 模式及倒傳遞神經網路構建四種旅行時間預測模式,分別進行預測績效分 析。魏健宏等人(2003)[19]收集探針車、道路偵測器以及事件等資訊,利用 類神經網路中的倒傳遞神經網路進行實證評析。 整理相關之研究後,類神經網路模式之構建類型可以分成六類如下表 說明 。
表 2.1 類神經網路模式之構建類型整理 模式名稱 模式特性 模式構建概念 輸入變數類型 ANN1 時間序列模式 時間序列模式 利用歷史旅行時間資 料預測旅行時間 不同時期之旅行 時間 ANN2 時間序列+ 交通特性模式 時間序列+ 交通特性模式 由於歷史旅行時間資 料間隔過大,較不能 即時、準確地預測目 前的旅行時間,因此 加入一交通特性之變 數,以增加預測績效 不同時間之旅行 時間、交通特性變 數(流量、速度、 時間) ANN3 車輛偵測器 路段與速度模 式 由於速度與路段長度 已知,則可計算出各 偵測器間之旅行時 間,若計算頻率愈 高,準確率愈高 車道變化路段 數、各路段之長 度、車道數與車輛 偵測器速度 ANN4 客運車輛 GPS 資料 利用客運車輛 GPS 資料及道 路幾何特性 由客運車輛之 GPS 資 料進行旅行時間預 測。 客運車輛 GPS 速 度、車道變化路段 數、各路段之長 度、車道數與 GPS 位置 ANN5 總體資料融合 時間考量模式 1. 考慮當時之 交通資訊 2. 考慮當時及 推估一段時 間推移後之 交通資訊 1. 考慮客運 GPS、車 輛偵測器、事件、 道路幾何等因素以 構建預測模式 2. 利用以上資料推估 衍生之樣本進行模 式訓練、測詴 偵測器資料、事件 資料、客運車輛 GPS 資料、交通量 資料(主線與匝 道)、幾何特性資 料、匝道型態、日 期時間、車輛出發 時間等資料 ANN6 總體資料融合 空間考量模式 ANN5 資訊+ 上游路段交通 狀況建立模式 利用客運 GPS 資料、 車輛偵測器、事件、 道路幾何特性,再加 上上游路段交通狀況 一併考量以構建模式 ANN5+上游路段 群組之客運及車 輛偵測器資訊 [資料來源:魏健宏等人(2003)[19]]
模擬方法 模擬方法為利用軟體模擬實際交通的狀況,主要可分為巨觀粒子模擬 及微觀粒子模擬。 1.巨觀粒子 Chang 等人(1994)[20]建構一套巨觀粒子模擬(MPSM)系統,分別採用 MPSM,修正的 MPSM(M-MPSM),和微觀(micro)三種車流模擬模型,用 於先進交通管理系統的應用,並以 MPSM 模擬高速公路上的車流, M-MPSM 模擬都市街道車流系統,而微觀模型則用來針對已產生擁塞的街 道模擬,則可以模擬結果推導出包含旅行時間等各項車流系統資訊。 Johnston 等人(1999)[21]建構一套巨觀的車流模擬系統,以平行計算的方式 來運作,並將明尼阿波理斯市(Minneapolis)的公路路網的車流資訊代入以 驗證此模型的準確度與計算模擬速度。Kachani 等人(2001)[22]利用巨觀模 式將車流視為液體流動,使二階多項式旅行時間(PTT)和指數旅行時間 (ETT)等模式來模擬出駕駛對上游的擁塞與否所產生的反應行為與路段密 度或鄰近路段密度所造成的車流效應這兩種現象,藉以估計旅行時間,可 增加等候線來將此類模型用於使用者動態均衡的問題上。 2.微觀粒子 Kiesling 等 人 (2005)[23] 提 出 微 觀 的 車 流 模 擬 系 統 平 行 時 間 (time-parallel)模擬的方式將各節點時間區隔成好幾個區段(interval),此模 擬方法有兩個優點,其一為即使不存在適當的變數仍可以使用此模擬方法 來模擬,其二為每節點可以單獨模擬出其時間間距,而不需要考慮其它節 點。經過驗證此模型後得到,在低密度時使用有較佳的適用性。 而本篇文章主要針對 k-NN 方法進行研究,因此將該文獻回顧獨立於 2.2 小節進行討論。
2.2
k-NN 預測交通資訊相關文獻
最近鄰分群法(Nearest Neighbor classification)是一個廣為使用的一套分 群方法,在已知分群的數量下,將類似的樣本分類至同一分群中。
方法,而是一種利用比較歷史資料與即時資料,找出擁有相同特性的資料 的方法。最初是由 Benedetti(1977)[24]、Stone(1977)[25]及 Tukey(1977)[26] 這些學者提出了近鄰法(nearest neighbor method)的概念發展而來。這些學者 利用一元位置估計(Univariate Location Estimators),建立了無母數迴歸式的 模型,進而引申出最近鄰法的概念,可以利用輸入的資訊找尋出與資料庫 中最相似的資料。Altman(1992)[27]將以上的研究進行整理,將一元位置估 計引申至多元位置估計(Multivariate Location Estimators)並且提出了 k-NN 法,該方法將歷史資料區分群,再將輸入資料與之前的歷史資料相比對, 比對出該資料與那一個分群較為類似,即可用歷史資料推估資料。
而 Gary 等人(1991)[28]利用迴歸模型的概念,延伸出無母數迴歸的模型 以預測資訊。首先利用一階自迴歸模型(first-order autoregressive system)整理
出如何在利用單變數建立模型x'(t)bx(t)e(t),並利用該公式以推估資
料。
其中 b 代表自迴歸之相關係數,而 e(t)代表獨立、常態分佈且平均為零 之隨機變數。在利用最小均方差(minimum mean-squared error, MMSE)的方 法求出自變數與應變數間最接近的解以預測資料,發現當 e(t)=平均數=0 時, 可以得到最小均方差的模型 xˆ'(t)bx(t)可以利用自變數而得到最佳的預測。 然而在多變數下,由於e(t)的平均值受多變數的影響而不再為零,因此將由 最小均方差的方法為找出與實際值最接近的歷史資料做為預測值,公式如 下:Minimize Q = x′ t − x t 2 = x′ t − x t . (x′ t − x t )′ 因此 k-NN 的方法均詴著找出最小的平方差做為預測結果。 Smith、Demetsky(1997)[29]對 k-NN 法進行績效評估,分析比較以下四 種交通流量的預測方法:歷史平均法,時間序列法、類神經網路法與 k-NN 法。評估的方法為利用歷史的流量資料預測未來的流量再和實際值做比對, 判斷那一個方法的績效較差,結果發現當歷史資料大時,k-NN 法所預測的 誤差結果比其他三種方法所得到的結果誤差來得小,因此利用 k-NN 針對流 量進行預測是可行的,比較誤差率的結果為迴歸 9.57%,時間序列為 9.03%, 類神為經 8.93 而 k-NN 為 7.54%。因此 k-NN 法有較佳的預測能力。Smith、 Williams 以及 Oswald(2002)[30]將權重(Weight)的想法加入 k-NN 的模型,考 慮目前的流量可能會與先前的交通流量有關係,但是隨著時間距離的增加, 其影響的程度愈小,所以利用權重的方法進行修正,將不同時間所造成的 影響納入考慮。
Clark(2003)[31]除了流量外,詴著利用 k-NN 法詴著針對其他可蒐集到 的交通資訊進行預測,如速度和佔有率。接著進行一一分析和交叉分析, 結果發現當同時利用流量、佔有率和速率這三項變數進行分析時,所得到 的預測值相對於個別比對而言,誤差有下降的現象,所以愈多變數進行討 論可以得到更精確的結論。接著 Rice、Zwet(2004)[10]希望可以預測出旅行 時間,利用流量、佔有率推估該路段之速率,並由該速率資訊得到旅行時 間資料庫。因此可以由估計得之旅行時間應用 k-NN 法以推估下一時段旅行 時間。 Robinson、Polak(2005)[32]提出了四點建立 k-NN 模型時應該先設定的 條件。 1.決定模式中的特徵向量。 2.利用加權法減少 k-NN 模式的誤差。 3.設定距離量度(distance metric)。 4.決定判斷類似樣本的數量。 Chang 等人(2006)[33]提出 k-NN 法需要加入門檻以提升預測績效,加入 的門檻為以下兩種類型。 1. 交通資訊門檻 設定交通資訊的上下界門檻,當交通擁擠或流量很少下,所對應的交通 情形相差不大,因此當交通資訊超過上下界時,即以上下界資訊為當時之 資訊。 2. 比對時間門檻 當道路開始擁塞或擁塞逐漸解除期間,可能會對應著相同的交通資訊, 然而其代表的意義並不相同,因此這兩種期間所對應的旅行時間也不會相 同。故為了避免進行比對時,將這兩種情形都同時考慮,因此加入了時間 的門檻,避免在比對時發現早上的交通資訊與某一歷史傍晚的交通資訊相 類似而提高預測的誤差。
2.3
小結
本研究整理旅行時間預測的相關研究,大致可以分為以下五種方法:迴 歸分析法、時間序列法、類神經網路法、模擬法及 k-NN 方法。 其中迴歸及時間序列法根據不同的特徵建立不同的模型後,再利用校估 所得的參數進行預測,然而這些參數隨著不同的特徵而改變,因此在外在 環境的改變下,就需要重新校估參數以維持其準確率。 類神經網路法收集各種交通資訊,再依照不同資料來源、各輸入變數之 組合以調整模式架構,進行訓練與測詴,以得到變數與旅行時間之間的關 係,因此在模式的訓練與測詴上,隨著變數的增加,需要較長的運算時間。 而模擬法,則是利用當時的交通狀況以及車流模式,模擬未來的交通狀況, 以推得旅行時間,因此隨著路網複雜度的增加,會需要較長的計算時間。 而根據 k-NN 相關研究發現,除模擬方法外,在比較 ANN、迴歸方法、 時間序列方法及 k-NN 法後,k-NN 方法在預測交通資訊上(速度、流量)下, 可以有相當好的績效。因此本研究將詴著研究是否在旅行時間預測上也有 足夠的準確率。而目前旅行時間預測上,大部分的文獻均以模擬方法、ANN、 迴歸方法、時間序列方法及 k-NN 法進行預測。本篇研究將詴著利用 k-NN 方法進行旅行時間的預測,並且將該方法應用於實際的案例進行分析,最 後詴著利用不同的分群以找出較佳的預測結果。第三章 資料處理
本研究希望可以利用即時的交通資料找出歷史資料和即時資料之間的 關係以預測旅行時間,因此將以 k-NN 做為資料分析的方法先找出那一些歷 史資料與即時資料相類似。目前本研究的資料來源,主要來由於高速公路 的偵測器資料及電子收費系統(ETC)的通過車輛資訊,以下將說明這兩項資 料之型態及資料處理過程。3.1 偵測器資料與 ETC 資料的比較
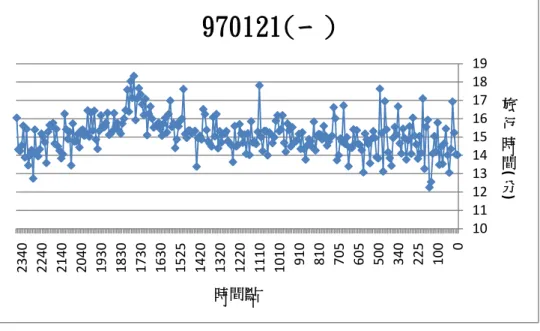
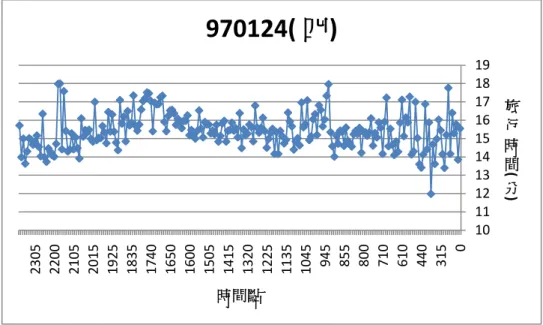
已知偵測器資料屬於速率及流量之道路資訊,而 ETC 資料為旅行時間 之資訊,其中 ETC 資料為經過比對過濾而得之旅行時間資料,而流量資料 為原始資料,以下將從民國 97 年 1 月中選出星期一到星期天各一天,從龍 潭收費站到樹林收費站間北上的流量資訊及旅行時間資訊進行比較。圖 3.1 970121(一)流量與旅行時間對應圖 10 11 12 13 14 15 16 17 18 19 0 100 225 340 500 605 705 810 910 1010 1110 1220 1320 1420 1525 1630 1730 1830 1930 2040 2140 2240 2340 旅 行 時 間( 分) 時間點
970121(一)
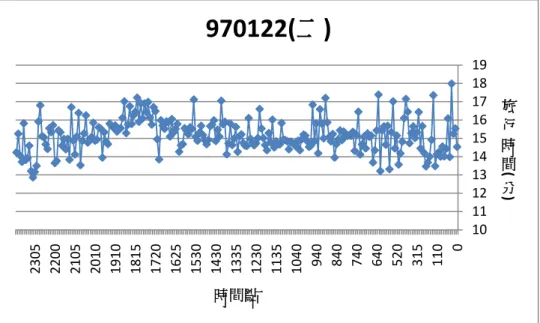
50 60 70 0 500 1000 1500 2000 0 100 200 300 400 500 600 偵 測 器 位 置 時 間 點 每五分鐘累積流量 偵測器位置圖 3.2 970122(二)流量與旅行時間對應圖 10 11 12 13 14 15 16 17 18 19 0 110 315 520 640 740 840 940 1040 1135 1230 1335 1430 1530 1625 1720 1815 1910 2010 2105 2200 2305 旅 行 時 間( 分) 時間點
970122(二)
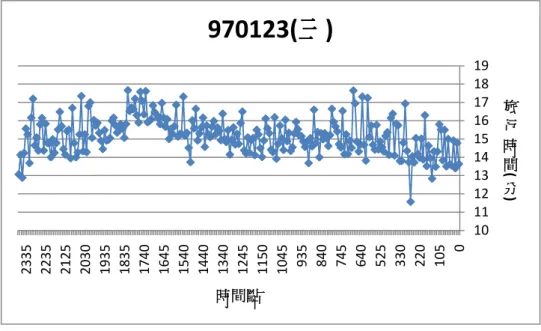
50 60 70 0 500 1000 1500 2000 0 100 200 300 400 500 600 偵 測 器 位 置 時 間 點 每五分鐘累積流量 偵測器位置圖 3.3 970123(三)流量與旅行時間對應圖 10 11 12 13 14 15 16 17 18 19 0 105 220 330 525 640 745 840 935 1045 1150 1245 1340 1440 1540 1645 1740 1835 1935 2030 2125 2235 2335 旅 行 時 間( 分) 時間點
970123(三)
50 60 70 0 500 1000 1500 2000 0 100 200 300 400 500 600 偵 測 器 位 置 時 間 點 每五分鐘累積流量 偵測器位置圖 3.4 970124(四)流量與旅行時間對應圖 10 11 12 13 14 15 16 17 18 19 0 315 440 610 710 800 855 945 1045 1135 1225 1320 1415 1505 1600 1650 1740 1835 1925 2015 2105 2200 2305 旅 行 時 間( 分) 時間點
970124( 四)
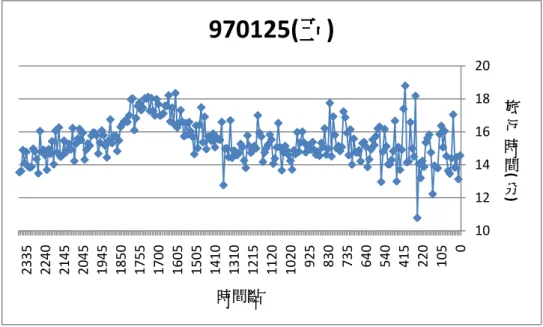
45 50 55 60 65 70 0 500 1000 1500 2000 0 200 400 600 偵 測 器 位 置 時 間 點 每五分鐘累積流量 偵測器位置圖 3.5 970125(五)流量與旅行時間對應圖 10 12 14 16 18 20 0 105 220 415 540 640 735 830 925 1020 1120 1215 1310 1410 1505 1605 1700 1755 1850 1945 2045 2145 2240 2335 旅 行 時 間( 分) 時間點
970125(五)
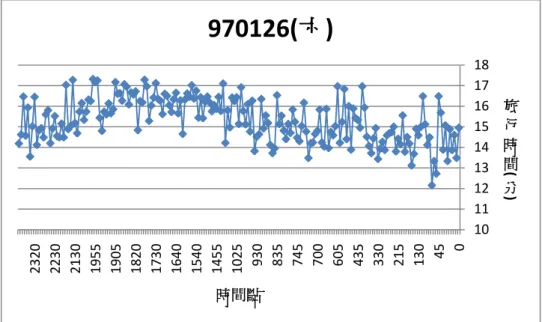
50 60 70 0 500 1000 1500 2000 0 200 400 600 800 偵 測 器 位 置 時 間 點 每五分鐘累積流量 偵測器位置圖 3.6 970126(六)流量與旅行時間對應圖 10 11 12 13 14 15 16 17 18 0 45 130 215 330 435 605 700 745 835 930 1025 1455 1540 1640 1730 1820 1905 1955 2130 2230 2320 旅 行 時 間( 分) 時間點
970126(六)
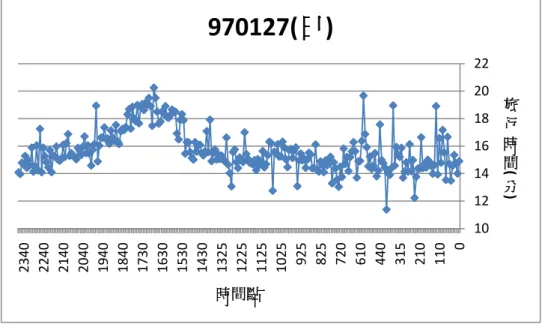
50 60 70 0 500 1000 1500 2000 0 100 200 300 400 500 600 偵 測 器 位 置 時 間 點 每五分鐘累積流量 偵測器位置圖 3.7 970127(日)流量與旅行時間對應圖 10 12 14 16 18 20 22 0 110 210 315 440 610 720 825 925 1025 1125 1225 1325 1430 1530 1630 1730 1840 1940 2040 2140 2240 2340 旅 行 時 間( 分) 時間點
970127(日)
50 60 70 0 500 1000 1500 2000 0 100 200 300 400 500 600 偵 測 器 位 置 時 間 點 每五分鐘累積流量 偵測器位置由以上這幾張圖可以發現以下幾點 A. 當旅行時間較長時,流量資料也有比較大的現象。 流量愈高代表有愈多的車輛使用該路段,因此道路負荷增加而旅行時間 增加,因此流量和旅行時間資料之間有關係存在。 B. 當時間點較早時,流量資料較小,旅行時間的變異也比較大。 由於流量較少,因此當有一些車速度較慢,就會造成旅行時間有過慢的 現象發生,因此本研究會再找尋方法再進一步將這些資料進行過濾。 C. 偵測器的流量經常出現 0 的情形。 當偵測器出現該情形,有時是出現錯誤資訊(“E”),有時是提供流量為 0 的資料,然而無法直接判斷是否是沒有車輛經過,仰或是產生了錯誤資訊。 因此本研究需要將某些出現過多異常值之偵測器進行過濾。 D. 某些時間點,偵測器流量有過大的情形。 某幾個時間點有資料過大的現象,因此本研究會根據前後時間點的流量 判斷是否有異常的現象發生,因此依照各時間點平均流量的 95%信賴區間 進行過濾,如果發現資料在一個或兩個連續時間點有缺漏的現象發生,則 利用前後時間點的平均資料進行插補,如果有過長一段時間沒有資料,較 視該段時間點沒有資料。 以下兩節將分別針對偵測器資料及收費站資料之處理進行說明及介紹。
3.2 高速公路偵測器資料
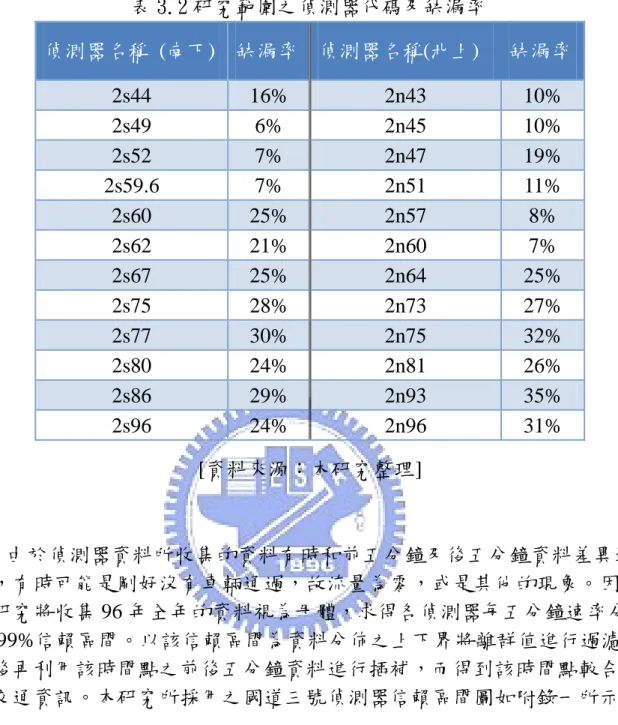
目前高速公路偵測器資料主要是在記錄每五分鐘所通過的大型車或小 型車的車輛總數、平均通過速率以及佔有率這三項資訊。本研究蒐集從樹 林收費站經龍潭收費站到後龍收費站間所有偵測器,以民國 96 年每五分鐘 的平均速率及流量資料做為歷史資料。然後利用 97 年的交通資料與歷史資 料進行比對,希望可以找出與即時資料相類似的歷史資料。而本研究所要 分析的是在半個小時內,交通狀況的變化情形,比較在各個時間點比對前 半小時的交通情形下,速率及流量是否有增加或減少的趨勢。最後可以得 到各個時間點下的交通資訊趨勢,即為本研究所蒐集進行分析的資料。= 其中樹林到後龍之間,主要有偵測器北上及南下各 24 及 22 組,本研究 先以出現錯誤資訊”E”之情形進行統計,發現有相當多缺漏值的出現,本研 究將這些出現過多缺漏值之偵測器忽略不計,因此最後本研究將採用 12 組 北上及 12 組南下偵測器,以下將分別列出本研究不採用偵測器之缺漏率, 及採用偵測器之缺漏率,如表 3.1 及 3.2 所示。其中偵測器名稱代表不同位 置之偵測器,如 2s37 即代表國道三號北上路段里程數 37 公里之偵測器。 表 3.1 缺漏嚴重之偵測器代碼及缺漏率 偵測器名稱 (南下) 缺漏率 偵測器名稱 (北上) 缺漏率 2s37 36% 2n59.1 54% 2s41 22% 2n59.8 96% 2s48 13% 2n61 21% 2s58 13% 2n65 58% 2s59.1 12% 2n70 86% 2s71 100% 2n77 46% 2s81 38% 2n80 30% 2s94 61% 2n86 36% [資料來源:本研究整理]表 3.2 研究範圍之偵測器代碼及缺漏率 偵測器名稱 (南下) 缺漏率 偵測器名稱(北上) 缺漏率 2s44 16% 2n43 10% 2s49 6% 2n45 10% 2s52 7% 2n47 19% 2s59.6 7% 2n51 11% 2s60 25% 2n57 8% 2s62 21% 2n60 7% 2s67 25% 2n64 25% 2s75 28% 2n73 27% 2s77 30% 2n75 32% 2s80 24% 2n81 26% 2s86 29% 2n93 35% 2s96 24% 2n96 31% [資料來源:本研究整理] 由於偵測器資料所收集的資料有時和前五分鐘及後五分鐘資料差異過 大,有時可能是剛好沒有車輛通過,故流量為零,或是其他的現象。因此 本研究將收集 96 年全年的資料視為母體,求得各偵測器每五分鐘速率分佈 在 99%信賴區間。以該信賴區間為資料分佈之上下界將離群值進行過濾。 最後再利用該時間點之前後五分鐘資料進行插補,而得到該時間點較合理 的交通資訊。本研究所採用之國道三號偵測器信賴區間圖如附錄一所示。
3.3 電子收費系統資料
電子收費系統(ETC)為臺灣 ITS 產業的重要成就,大幅降低了車輛通過 收費站的時間成本及收費站營運的人事成本。本研究利用遠通電收所匯整 的 ETC 資料,蒐集每一台安裝 ETC 車機之車輛通過各收費站的時間,若車 輛通過兩個以上的收費站,進行處理後即可得到這些車輛通過兩收費站間 所需要的旅行時間。由於高速公路偵測器的資料是每五分鐘收集一次,因 此本研究將整理每五分鐘通過兩兩收費者所需要的平均旅行時間。 然而某一些車輛可能開的過慢,或是中途有離開交流道,因此造成該平 均旅行時間過長,因此本研究將收集 96 年通過兩兩收費站間所有車輛資料 視為母體,求得各車輛通過兩兩收費站之旅行時間分佈的 99%信賴區間。 若有車輛之旅行時間在該信賴區間外,則視該車為離群值進行過濾,最後 可推估較可靠的歷史旅行時間。而國道三號龍潭到樹林北上之旅行時間信 賴區間圖如下圖所示,其他日期之比較結果如附錄二所示。 圖 3.8 96 年歷史旅行時間信賴區間圖 [資料來源:本研究整理] 0 5 10 15 20 25 30 35 40 0 120 240 400 520 640 800 920 1040 1200 1320 1440 1600 1720 1840 2000 2120 2240 每 五 分 鐘 平 均 旅 行 時 間( 分) 時間點96年龍潭到樹林旅行時間
平均值 上界 下界本研究的研究範圍為國道三號從樹林收費站至後龍收費站之間的旅行 時間,在實際調查後發現車輛同時通過樹林、龍潭、後龍,三個收費站的 旅行時間比通過兩兩收費站來的少,而且相當多車輛通過樹林及龍潭收費 站,因此本研究將收集從樹林到龍潭的歷史旅行時間加上龍潭到後龍的歷 史旅行時間,即為樹林到後龍的歷史旅行時間。而收集兩兩收費站的資料 以推得三個收費站間的旅行時間,可以得到較多的歷史資訊。舉例說明, 當本研究欲蒐集早上7:00 從樹林出發到達後龍收費站南下的歷史旅行時間 為何,資料獲得的方法如下: 1. 蒐集某一天早上 7:00~早上 7:05 通過樹林收費站南下的車輛資訊。 2. 得到這些車輛平均通過龍潭收費站的旅行時間,若需要 33 分鐘。 3. 再蒐集當天早上 7:30~7:35 這五分鐘通過樹林收費站的所有車輛資 訊。 4. 得到這些車輛平均通過樹林收費站至後龍收費站所需要的旅行時 間,若為32 分鐘。 5. 將樹林到龍潭以及龍潭到後龍的旅行時間加總,即可判斷某一天早 上7:00 從樹林收費站出發,到達後龍收費站所需要的旅行時間為 65 分鐘。 6. 最後比照以上方法收集各時段及南北向之資料,可以得到當天每五 分鐘從樹林(後龍)出發,到達後龍(樹林)所需要的旅行時間。 旅行時間估計流程如下圖所示。
得到車輛通過那一個 收費站及通過時間 得到車輛每五分鐘 通過兩兩收費站之 平均旅行時間及出 發時間、地點 過濾旅行時間 過長資料 旅行時間資 料庫 得到通過第n個收 費站之旅行時間 設定通過第n個收 費站之出發時間 得到通過從第1個 到第n+1個收費站 之旅行時間 n=n+1 是否到計算終點 n=0 代表出發點 否 是 圖 3.9 歷史旅行時間估計流程圖 [資料來源:本研究整理]
3.4 ETC 與 VD 之間關係
本研究的目的為利用即時偵測器資訊與歷史偵測器資訊進行比對,再利 用 ETC 所估計之旅行時間進行預測,以下將討論 ETC 與交通資訊的關係。 利用歷史偵測器資訊推估當時之旅行時間以及 ETC 所推估之旅行時間進行 比較,觀察兩者是否會反應相同之交通情形。 由於國道高速公路局在民國 98 年開始針對每分鐘一筆交通資訊進行收 集與整理,因此本研究由速率資訊與偵測器位置推得各時間點下偵測器間 之旅行時間,其推估的流程如下圖所示。 圖 3.10 偵測器推估歷史旅行時間流程圖 [資料來源:本研究整理] 貣始時間 t 貣始偵測器 N=1 貣點到第一個偵測 器路段(D1)速度 (V1(t)) 路段 D1旅行時間 (T1=D1/V1(t)) 第 N-1 個到第 N 個 偵測器路段(DN)速 度 VN-1(T)+VN(T)/2 計算通過下一 個偵測器之時 間 T=t+T1 路段 DN旅行時間 TN=2DN/(VN-1(T)+VN(T)) 下一個偵測 器 N=2 是否抵達終 點收費站 下一個偵測器 T=T+tN N=N+1 是 否 時間 t 之旅行時 間為 T-t本研究收集 5 月 12 日至 5 月 25 日之偵測器資訊及 ETC 資訊進行比較, 以 5 月 14 日國道三號由樹林到龍潭為例,如下圖所示。由於電子收費不一 定每分鐘都有車輛經過,故旅行時間仍以每五分鐘推估一次。 圖 3.11 偵測器與 VD 歷史旅行時間推估圖 [資料來源:本研究整理] 由上圖可以發現偵測器(VD)的變異較 ETC 來的大,由於偵測器速率的 變異較大,所以推估出來的旅行時間變異也隨之較大,但是兩者有大約有 相同的趨勢,因此兩者有類似的關係。 13 13.5 14 14.5 15 15.5 16 16.5 17 00:0 0 01:2 0 02:4 0 04:0 0 05:2 0 06:4 0 08:0 0 09:2 0 10:4 0 12:0 0 13:2 0 14:40 16:0 0 17:2 0 18:4 0 20:0 0 21:2 0 22:4 0 每 五 分 鐘 平 均 旅 行 時 間( 分) 時間點
5/14(四)旅行時間推估
ETC VD第四章 旅行時間預測模式介紹
本研究的目的在於如何利用即時的交通資訊預測旅行時間,由於旅行 時間會隨著交通情形的不同而有不同的現象,若道路較為擁塞,旅行時間 也會隨之上升,因此本研究將利用 k-NN 找出交通資訊與旅行時間的關係。 以下將針對 k-NN 模式進行介紹,並且說明模式所需要的參數。4.1 k-NN 介紹
k 最近鄰法(k-nearest neighbor method)是一套利用無母數迴歸發展 而成的方法,主要的貢獻在於由已知的歷史樣本中,找出與輸入值相似的 樣本,本研究希望可以利用該方法以找尋與即時樣本相類似之歷史樣本。 假設在相同的交通趨勢變化下會有相同的旅行時間,因此利用即時的交通 資訊比對歷史交通資訊,可以利用本方法辨識出那些歷史時間下擁有類似 的交通資訊,並由該歷史時間所對應的旅行時間預測目前的旅行時間。模 式流程如下: • 由目前的交通資訊(速度、流量),找出類似的歷史資訊 • 觀察某路段各偵測器所得半小時的交通資訊變化情形 • 得到這些類似的歷史旅行時間,預測目前的旅行時間
4.2 k-NN 參數設定
由 2.2 節文獻回顧中,學者 Robinson 和 Polak(2005)將 k-NN 方法進行實 作提出如果要建立一個準確的 k-NN 模式,首先要先決定以下這四個要素: 1、決定模式中的特徵向量。2、決定判斷分群的樣本數量。3、利用加權法 減少 k-NN 模式的誤差。4、設定距離量度(distance metric)。因此以下將針 對這四點進行一步說明。 1. 決定模式中的特徵向量。 k-NN 的目標是在找尋最接近即時資訊的歷史資訊,本計畫利用偵測器 即時可收集到的資訊(流量、速率)做為特徵向量,由這些特徵進行比對,找 出與即時資訊相類似的歷史資訊。2. 利用加權法減少 k-NN 模式的誤差。 由於本計畫將同時比對流量與速率資訊的差異,由於這兩個變數的單位 不一致,所以需要再設定權重以減少因單位差異而造成的誤差。本研究希 望在尖鋒時刻下仍具有相當的準確率,因此以尖鋒時刻通過各偵測器之平 均流量與平均速率做為權重設定的判斷方式。 由於速率和流量單位的差異,而且平均流量較平均速率較大,因此流量 的變化也隨之較大,因此若未設定權重,可能速率變化沒有流量的變化來 的大,而忽略了交通異常的發生,並且也可能在類似交通樣本的判定上發 生誤差,因此需要設定權重值。而根據 Clark(2003)所提出權重的設定方法, 將利用尖鋒時刻的平均速率及流量進行標準化。假設在尖鋒時段下平均五 分鐘流量約為每五分鐘 500 輛汽車,而平均速率約為每小時 70 公里。權重 的設定為平均流量乘上 1/500 而平均速率為乘上 1/70,將標準化後的歷史資 訊與即時資訊進行比對,以找出較類似於即時資訊之歷史資訊。 舉例來說:若即時速度及流量為 80、200,而有兩筆歷史資訊,分別為 90、200 及 80、250。則差異值分別為(90-80)/70=1/7,(250-200)/500=1/10, 則第二筆歷史資訊較接近。 3. 設定距離量度(distance metric)。 將即時資訊與各分群資訊的差異加總,即可得到樣本與各分群的特徵差 異距離,而距離量度為判斷即時資料與那一組特徵資料相類似的一種判斷 指標,當距離量度小於某一個門檻值,則判斷該即時資訊與某一組歷史資 料類似。然而距離量度的判斷目前並沒有一個很好的準則來對各種資料進 行距離量度的判斷,在面對不一樣的環境條件,分析人員必頇自行建立一 套準則來做處理,因此隨著不同的特徵分群,將會採用不同的距離量度以 判斷即時資料與那一個歷史資料類似。 本研究將挑選最佳的類似樣本數做為旅行時間預測的門檻,因此本研究 將以該樣本數做為距離量度的門檻。 4. 決定判斷類似樣本的數量。 本計畫將比對每半個小時下每五分鐘通過各偵測器的流量變化和平均 速度變化,再與歷史資料進行比對,比對出該半小時的交通狀況較近似於 那些歷史資料,再從這些歷史資料中挑選最接近的 k 筆資料進行旅行時間 預測。
根據 Fukunag[34]於 1973 年時提出 k-NN 於資料分群下,每一群最佳的 數量,若該資料滿足常態分配,則各群最佳數量如下式所示。 本研究將針對旅行時間分配進行驗證,判斷是否滿足常態分配。驗證各 旅行時間的機率是否滿足常態分配,各旅行時間機率如圖 4.1 所示。本研究 驗證方法為利用卡方適合度檢定進行驗證。驗證公式如下: , 其中 e 代表在常態分佈下,各旅行時間下有幾天有相同的旅行時間 o 代表實際各旅行時間下,有幾天有相同的旅行時間 n 代表總共有幾天,考慮 1 年的樣本,因此 n=365 天 圖 4.1 旅行時間對應常態分配分佈圖 0 0.05 0.1 0.15 0.2 0.25 0 10 20 30 40 50 60 70 機 率( % ) 旅行時間(分)
2007年13:25~17:25
後龍收費站到樹林收費站
觀察值 常態分佈 代表樣本總數 代表樣本維度 : : ) 16 6 ( ) 2 2 ( ) 2 ( ) 2 ( 4 4 4 2 2 1 / 4 2 2 2 * N n N n n n n n n k n n n n n n
n i i i i e o e 1 2 ) (由上圖發現,在後龍到樹林間旅行時間大部分有 21 種的出現的可能 (21 分~42 分) 檢定的假設在 95%信賴水準下結果如下所示: 因此旅行時間的分佈拒絕常態分佈(H0)的假設。 由於 Robinson 和 Polak[31](2005)比較不同的類似樣本數進行比較,挑 選在平均絕對誤差率(MAPE)及均方根誤差(RMSE)均最小的最佳的樣本數, 發現當歷史資料庫有 15,000 筆下,挑選 400 筆類似樣本進行預測可以得到 最小的誤差,因此本研究參考該方法,利用 MAPE 針對本研究對後龍到樹 林間旅行時間預測結果進行驗證,嘗詴在各種不同的 k 值下,旅行時間預 測的誤差率為何。 下圖為比較為在統計 97 年 3 月的預測結果後,列出不同的 k 值所預測 的旅行時間與實際旅行時間的誤差百分比,結果當 k=400 時為誤差最小的 結果,驗證文獻回顧中 Robinson 所得到的結果。 圖 4.2 不同 k 值對應誤差圖 [資料來源:本研究整理] 0% 5% 10% 15% 20% 25% 1 50 100 200 300 400 500 600 700 800 900 誤 差 百 分 比 K值
不同k值對應誤差圖
41 . 31 2107.87 ) ( : : 2 ) 1 21 ( 1 2 1 0
n i i i i e o e H H 不滿足常態分佈 滿足常態分佈4.3 k-NN 模式建立
在分類及分群之後,本計畫目標將即時資訊和歷史資訊相比對,找尋即 時資訊和那一天的歷史資訊相類似。根據文獻回顧中,Clark 於 2003 年提 出利用歷史的流量及佔有率以預測即時的流量及佔有率。本篇文章利用速 率及流量作為交通資訊,找尋歷史與即時資訊的平方差加總後,最相近的 400 組樣本進行分析。由於這些樣本的歷史資訊與即時資訊類似,因此可利 用這些樣本的歷史資訊來預測交通狀況,而判斷的模式建立如下: 𝑡𝑠𝑠 = 𝑤𝑞 𝑞𝑖𝑗𝑟 − 𝑞 𝑖𝑗ℎ 2 + 𝑤𝑣 𝑣𝑖𝑗𝑟 − 𝑣 𝑖𝑗ℎ 2 𝑇 𝑗 =1 𝐿 𝑖=1 (1) L:比對範圍的總偵測器數量。 T:比對的時間長度,本計畫將比對一個小時的交通變化。 𝑞𝑖𝑗𝑟 :即時各時間點(i)、各偵測器下(j)之流量。 𝑞𝑖𝑗ℎ:歷史各時間點(i)、各偵測器下(j)之流量。 𝑣𝑖𝑗𝑟:即時各時間點(i)、各偵測器下(j)之速率。 𝑣𝑖𝑗ℎ:歷史各時間點(i)、各偵測器下(j)之速率。 𝑤𝑞:流量的權重。𝑤𝑣:速率的權重。 tss :總差異和。 在找到類似的分群特徵後,本研究將收集歷史資料中滿足該特徵下實際 日期,並代入歷史時間資料庫後,得到這些日期的歷史旅行時間平均值,即 可預測各時間點之旅行時間。本研究同時考慮速度與流量,希望可以避免將 尖鋒時段因擁塞而流量較小以及離峰時段流量較少的現象視為同一現象,並 且本模式希望在擁塞時段仍有較好的預測能力,因此以擁塞時段之平均速率 及流量做為權重的設定值。4.4 本研究所設定之 k-NN 模型
本篇研究與之前研究有以下兩點差異,1.設定不同的偵測器參數。2.增加時 間的維度。以下將分別介紹這兩點差異。 1.設定不同的偵測器參數 除了不同的交通資訊需要不同的參數以進行標準化,不同的路段的資料 變異也有相當的差異,所以也應該需要設定不同的參數進行標準化以提升 準確率,因此將 3.3.3 節之公式(1)進行修正。 由式(1)可以得知判斷資料差異的方法為下式所示: 𝑡𝑠𝑠 = 𝑤𝑞 𝑞𝑖𝑗𝑟 − 𝑞𝑖𝑗ℎ 2 + 𝑤𝑣 𝑣𝑖𝑗𝑟 − 𝑣𝑖𝑗ℎ 2 𝑇 𝑗 =1 𝐿 𝑖=1 若以兩組偵測器為例,則可將式(1)改寫如下: 𝑡𝑠𝑠 = 𝑤𝑞 𝑞𝑖𝑗𝑟 − 𝑞𝑖𝑗ℎ 2 + 𝑤 𝑣 𝑣𝑖𝑗𝑟 − 𝑣𝑖𝑗ℎ 2 𝑇 𝑗 =1 𝐿 𝑖=1 =
h j r j h j r j h j r j h j r j v v q q T T j h j r j h j r j h j r j h j r j v v v v q q q q w w w w v v v v q q q q 2 2 1 1 2 2 1 1 1 2 2 1 1 2 2 1 1 0 0 0 0 0 0 0 0 0 0 0 0 . 然後本研究再加入同時考慮不同偵測器所帶來的差異而重新調整權重 值,因此將利用不同偵測器在不同的交通資訊的變異數(𝜎2),考慮將總差異 和(tss)的歐氏距離(Euclidean distance)進行標準化,最後再針對即時資訊與 歷史資訊的差異進行標準化進行求解。因此最後 k-NN 模型將如下式所示:
i m i r i m i r i m i r mij rij v v q q T L i T j h ij r ij h j r j h j r j h ij r ij h j r j h j r j v v v v q q q q v v v v v v q q q q q q 2 2 1 1 2 2 2 2 2 1 2 2 2 1 1 1 2 2 1 1 2 2 2 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 tss ……(2) 2. 增加時間的維度 之前的文獻大多都只有一個時間點對一個時間點進行比較,進而比較兩 個時間點之間的差異,可稱之為單時間點 k-NN 法。但是本研究希望可以比 較在一段時間的推移下,交通資訊的改變。因此希望可以分析在半個小時 之間交通狀況的變化下,是否有某一歷史時間點有相同的交通狀況變化。 故本研究比較是否交通狀況逐漸變順暢或是逐漸變擁擠,利用特徵比對 (pattern Recognition)的方法進行搜索,可稱之為多時間點 k-NN 法。 舉例說明,如果針對一組三個時間點、三個偵測器的資料進行比對,在 下午兩點鐘進行比較,則差異值的求法可分為三個階段(stage)如下圖說明。 圖 4.3 差異值說明圖 [資料來源:本研究整理]Stage 1 Stage 2 Stage 3
差異值為(0+4) ×1+(0+3)× 2+(2+1)×3 =19
首先在第一個階段得到即時或歷史各時間點之交通資訊,接著在第二階 段建立交通資訊的變化趨勢矩陣,第三階段為利用第二階段兩個時間點交 通趨勢矩陣,由絕對差異得到兩時間點比對之差異矩陣。最後利用該差異 矩陣求出歷史與即時交通資訊的差異值。在最後一個階段需要加入一個考 慮因素,由於不希望比對出的交通資訊趨勢反應著不同的交通狀況。舉例 說明,像是交通從流量很少到流量正常,與流量正常到擁擠,是反應著兩 種交通狀況,但是可能反應著相同的交通變化趨勢,因此需要再加入一個 貣初點。而貣始點為即時與歷史時間點當時的交通資訊,並找出貣始點之 絕對差異,再由貣始點之差異值與交通趨勢之差異進行內積,並考慮不同 的偵測器所比對之差異值,再將這些差異值加總,即為比對的差異值。因 此由上例,歷史的 14:00 與即時的 14:00 這兩個時間點的差異值為(0+4)× 1+(0+3)×2+(2+1)×3 =19。最後比較所有歷史時間點與即時資訊的差異值, 比對出差異最小的結果進行預測。 本研究時間比對範圍設定為 30 分鐘,以每五分鐘視為一個時間點,故 比對範圍為六個時間點。而比對之時間門檻(time window)為比對與當下時 間點的前後兩小時,故以 24 個時間點做為時間門檻,希望可以找出與目前 類似的歷史時間點。因此公式改寫如下。 ) 3 )....( ). ( . ( ) ( ) ) ( ( ) ( tss 6 6 1 y
j hi j ri j hi j ri j hi j ri j hi j ri j hi j ri j hi j ri j v T j hi j ri j hi j ri j hi j ri j hi j ri j hi j ri j hi j ri j y j x y y hi j hi j ri j hi j ri j hi j ri j hi j ri j hi j ri j hi j ri j q T x x ri L j j hi j ri j hi j ri j hi j ri j hi j ri j hi j ri j hi j ri j y j x v v v v v v v v v v v v diag v v v v v v v v v v v v v v q q q q q q q q q q q q diag q q q q q q q q q q q q q q 其中 hi 代表歷史時間點,而 ri 代表即時時間點。x 代表當下的時間點, 每五分鐘代表一個時間點。假設當日晚上 00:00 為第一個時間點,則 x=0, 而 00:05 為第二個時間點,故 x=1,依此類推。而 y 代表比對的時間點(即即 時時間點的前後兩小時),故 y 的上下界為歷史每一天的 x-24<y<x+24 時間本研究將比對在每半個小時歷史資訊與即時向前推半個小時間資訊的 差異,以找出在半個小時歷史資訊和即時資訊的變化,如果兩者變化相近, 則代表這兩個時間點上有相似的交通資訊,並且以兩個小時做為時間門檻。 舉例來說,若欲預測今天早上九點的旅行時間,則以今天早上八點半到早 上九點交通資訊,搜索歷史早上六點半到七點、七點到七點半…到早上十 點半到早上十一點的交通資訊,每天各九組資料進行比對,找出最相似的 交通資訊。
![圖 1.1 研究流程圖 [資料來源:本研究整理] 研究範圍界定 文獻回顧 資料處理 利用 k-NN 進行旅行時間預測 判斷即時資訊為那一個分群 比較不同分群下的績效 結論與建議 將資料進行分群](https://thumb-ap.123doks.com/thumbv2/9libinfo/8762178.208441/14.892.304.614.147.789/利用進行時間預測判斷即時資訊為那一個分群比較不同分群與建議.webp)