國 立 交 通 大 學
土木工程學系
碩 士 論 文
虛擬主站 RTK 結合三維雷射掃描儀
之精度提升研究
A Study on Improving The Accuracy of
VRS by 3D Laser Scanner
研 究 生:羅建評
指導教授:陳春盛 教授
虛擬主站 RTK 結合三維雷射掃描儀之精度提升研究
A Study on Improving The Accuracy of VRS
by 3D Laser Scanner
研 究 生:羅建評 Student:Chien-Ping Luo 指導教授:陳春盛 Advisor:Dr.Chun-Sung Chen 國 立 交 通 大 學 土 木 工 程 學 系 碩 士 論 文 A ThesisSubmitted to Department of Civil engineering College of Electrical Engineering and Computer Science
National Chiao Tung University
in partial Fulfillment of the Requirements for the Degree of Master
in
Computer and Information Science August 2006
Hsinchu, Taiwan, Republic of China
國 立 交 通 大 學
土木工程學系
碩士論文
虛擬主站 RTK 結合三維雷射掃描儀
之精度提升研究
A Study on Improving The Accuracy of
VRS by 3D Laser Scanner
研 究 生:羅建評
指導教授:陳春盛
中文摘要
三維雷射掃描儀(簡稱 3D LASER)與虛擬主站 RTK(簡稱 VRS)是兩種測量原 理與方法完全不同的儀器,二者之結合應用具有快速與準確等優點,未來二 者之結合應用將可取代許多原本以傳統測量施測之方式,本研究之主要目的 是研究有哪些平差模式可以提升二者結合應用之精度。 一般而言,3D LASER 作業只須三個已知點(常稱為後視點)即可定得絕對坐 標,為了增加多餘觀測量,本研究將 3 個後視點增加為 10 個後視點,針對 這 10 個後視點分別施測 5 組 VRS、1 組靜態 GPS、及 5 組 3D LASER,文中以 靜態 GPS 為對照組,以改正前後之 VRS 坐標與靜態 GPS 坐標較差之 RMS 及分 佈範圍為精度分析之指標。文中使用了 6 種改正模式將由後視點所組成之觀 測網進行平差改正,其中經實驗數據顯示,3D 坐標改正中之高程項改正效果 並不符合預期,主要原因是在於 VRS 的觀測量中高程含有系統誤差,而將平 面與高程分開改正後,原本存在 N、E 之較差經改正後大都減少至 15mm 之 內,改正成果符合我們預期。ABSTRACT
3D Laser Scanner and Virtual Reference Station RTK(also known as VRS)are two different surveying technologies based on different principle and approches, the advantage of their combination is rapaid and accurate.So the conventional surveying approch in many applications can be replaced by it, it is our hope to come up with an optimal combination in the adjustment in terms of accuracy.
In this research we increased the backsights from 3 to 10 points.and observed 5 sets of VRS,1 set of static GPS,5 sets of 3D LASER. we considered the Static GPS as the standard observation set,and compared it with the VRS’s coordinates after adjustment.The RMS and the range of differences are taken as the indicator of accuracy .We implemented the adjustment in 6 ways, due to the error existing in the height,so the 3D approach dosen ’ t fulfill our expectation.
However in the 2D approach, most of the differences between the VRS and the Static GPS all reduced within the range of ±15mm,which concured what we expected.
誌謝
首先感謝指導教授陳春盛老師兩年來的教誨,不管是學術上或是待人處 世方面,皆讓我有很大的收獲,感謝史天元老師、黃金維老師、李振濤老師、 及郭金運老師等在這兩年中於課業上的指導及協助,也很感謝測量組內的學 長大剛、廷融、宇伸、建廷、易達、基非等及同學子榜、家桂、紹禎等及學 弟們在研究上的協助,令本文得以順利完成。 回想起 16 年前大學畢業時一點都沒想過會再回來讀研究所,論年紀與體 力、腦力等狀況都已不若年輕時,因此這兩年重回學生生涯對我是一種挑 戰,家人的支持及內人悉心料理家事讓我無後顧之憂,這一切我都由衷的感 謝所有支持與幫助我的人。 最後感謝口試委員楊校長、黃金維老師、李振濤主任等於繁忙之餘抽空 來參與口試及對本文的建議等,使本研究內容更加充實。目錄
中文摘要………i ABSTRACT………ii 誌謝………iii 目錄………iv 表目錄 ………vii 圖目錄………ix 第一章 緒論………1 1-1 前言………1 1-2 研究動機與目的………1 第二章 研究方法與內容………3 2-1 研究方法………3 2-2 研究內容………4 2-3 相關研究探討………5 第三章 理論………9 3-1 三維雷射掃描儀之原理………9 3-2 VRS 之原理及國內 e-GPS 網建置情況………10 3-2.1 VRS 原理………10 3-2.2 國內 e-GPS 網建置情況 ………11 3-3 提升三維雷射掃描儀與 VRS 結合應用精度之理論基礎……… 133-4 平差改正模式探討………16 3-5 權值設定與精度指標………19 第四章 實驗部分 ………21 4-1 本研究所採用之儀器規格………21 4-2 實驗場設計說明………21 4-3 實驗進行步驟與方法………22 4-3.1 外業測量與整體作業流程………22 4-3.2 內業成果分析方法………24 第五章 研究成果與分析比較………26 5-1 靜態 GPS 成果………26 5-2 靜態 GPS 成果比較分析………26 5-3 VRS 成果………30 5-4 3D LASER 掃瞄成果………31 5-5 靜態 GPS 成果與 VRS 成果比較分析………34 5-6 3D 坐標平差改正成果分析………40 5-6.1 3D 改正模式………40 5-6.2 3D 改正成果………41 5-7 平面與高程分別改正成果分析………46 5-7.1 平面坐標改正模式………46 5-7.2 平面單點固定改正成果………46
5-7.3 平面無固定點改正成果………51 5-7.4 高程改正方式與成果探討………57 第六章 結論與建議………62 6-1 結論………62 6-2 建議………62 參考文獻………64 附錄一 靜態 GPS 儀器規格………67 附錄二 3D LASER 掃瞄儀規格………68 附錄三 VRS 儀器規格………69 附錄四 靜態 GPS 施測成果………70 附錄五 VRS 施測成果………74 簡歷 ………79
表目錄
表 5-1 TNML-YM 靜態 GPS 較差………27 表 5-2 TNML-FUSN 靜態 GPS 較差………28 表 5-3 TNML-JUNA 靜態 GPS 較差………29 表 5-4 VRS 施測門檻設定………30 表 5-5 3D LASER 施測方式………31 表 5-6 3D 模式第一組改正成果………41 表 5-7 3D 模式第二組改正成果………42 表 5-8 3D 模式第三組改正成果………43 表 5-9 3D 模式第四組改正成果………44 表 5-10 3D 模式第五組改正成果………45 表 5-11 第一組 2D 單點固定與無固定點改正成果……… 47 表 5-12 第二組 2D 單點固定與無固定點改正成果………48 表 5-13 第三組 2D 單點固定與無固定點改正成果………49 表 5-14 第四組 2D 單點固定與無固定點改正成果………50 表 5-15 第五組 2D 單點固定與無固定點改正成果………51 表 5-16 第一組 2D 無固定點十後視與三後視改正前後成果………52 表 5-17 第二組 2D 無固定點十後視與三後視改正前後成果………53 表 5-18 第三組 2D 無固定點十後視與三後視改正前後成果………54 表 5-19 第四組 2D 無固定點十後視與三後視改正前後成果………55表 5-20 第五組 2D 無固定點十後視與三後視改正前後成果………56 附表一 TRIMBLE 5700 施測精度規格表………67 附表二 MENSI GS200 性能規格表………68 附表三 TRIMBLE 5800 施測精度規格表………69 附表 4-1 靜態 GPS 施測成果(TNML)………70 附表 4-2 靜態 GPS 施測成果(陽明山)………71 附表 4-3 靜態 GPS 施測成果(JUNA)………72 附表 4-4 靜態 GPS 施測成果(FUSN)………73 附表 5-1 第一組 VRS 施測成果………74 附表 5-2 第二組 VRS 施測成果………75 附表 5-3 第三組 VRS 施測成果………76 附表 5-4 第四組 VRS 施測成果………77 附表 5-5 第五組 VRS 施測成果………78
圖目錄
圖 3-1 台灣地區含離島 e-GPS 基準站建置圖………12 圖 3-2 臺灣本島地區 VRS-RTK 定位服務範圍圖………13 圖 3-3 REALWORK 4.1 量測距離示意圖………14 圖 3-4 三維雷射掃瞄點位相對坐標資訊………15 圖 4-1 施測點位分佈圖………21 圖 4-2 作業流程示意圖………23 圖 4-3 平差改正模式示意圖………25 圖 5-1 第一組 3D LASER-GPS 基線較差柱狀圖………32 圖 5-2 第二組 3D LASER-GPS 基線較差柱狀圖………33 圖 5-3 第五組 3D LASER-GPS 基線較差柱狀圖………33 圖 5-4 第七組 3D LASER-GPS 基線較差柱狀圖………34 圖 5-5 第一組 VRS-GPS 坐標較差折線圖………35 圖 5-6 第二組 VRS-GPS 坐標較差折線圖………36 圖 5-7 第三組 VRS-GPS 坐標較差折線圖………37 圖 5-8 第四組 VRS-GPS 坐標較差折線圖………38 圖 5-9 第五組 VRS-GPS 坐標較差折線圖………39 圖 5-10 3D LASER-水準高程差較差散佈圖………57 圖 5-11 第一組 VRS-水準高程差較差 XY 散佈圖………58 圖 5-12 第二組 VRS-水準高程差較差 XY 散佈圖………59圖 5-13 第三組 VRS-水準高程差較差 XY 散佈圖………59 圖 5-14 第四組 VRS-水準高程差較差 XY 散佈圖………60 圖 5-15 第五組 VRS-水準高程差較差 XY 散佈圖………60
第一章 續論
1-1 前言 傳統的 RTK 因受限於主站距離等因素有諸多限制而造成施測上的不便,為 了克服其限制因此最近研發出 VRS 的技術,VRS 能解決 RTK 所遭遇之困難且 精度不比 RTK 差,於實際測量上更簡便,目前國內外有許多單位正在積極的 研究與應用此一技術。國內於 93 年起開始建置 e-GPS 網以取代傳統 RTK,已 有許多研究單位進行各方面如精度及演算法、效率等之研究,目前已進入應 用階段。三維雷射掃描儀也是近年來新發展的儀器,其高精度及施測速度與 不須接觸施測物之特點在測量上是一大突破,尤其是測量物體表面或地形表 面由於高密度的掃瞄可獲得非常精確的成果,不過三維雷射掃瞄儀也有其限 制,就是所測量之成果為測站本身之自由測站坐標系統,須以其他方式轉換 成絕對坐標系統,而欲取得絕對坐標之方式係在測站附近測得三~四個點之 絕對坐標再由儀器掃瞄此三已知點經由空間距離交會之方式定得絕對坐標 系統,因此三維雷射掃瞄儀與 VRS 的結合是快速獲得空間點位坐標的一種方 式。 1-2 研究動機與目的 目前傳統測量還有許多因天然環境或技術上無法克服的困難,如地形測量 或控制測量等有些地點無法以人力到達施測而造成精度與解析度過低等問 題,仰賴於新技術的出現,這些問題將逐一被突破。目前我們正積極研究利 用這些新技術以解決高難度之測量問題,如傳統測量所遭遇的人力、物力、時間等問題,有些問題在 VRS 與 3D LASER 出現以後即可解決,如以往傳統 測量採用經緯儀、水準儀等僅能逐點測量,不僅耗費大量時間、人力,且不 合效益,而以 VRS 結合三維雷射掃描儀可克服通視、地形、天候、距離等之 問題。另外在某些測量工作中,如土木工程基礎開挖時,對於開挖區域須即 時監測以免超挖或開挖不足,還有懸崖、峭壁等險峻地點無法施測等問題, 如今以 VRS 結合 3D LASER 施測將可輕易完成。 如何以最短之時間獲得大量精確點位資料一直是測量所欲解決之問題,唯 有如此才能提供即時資料更新,而結合三維雷射掃描儀與虛擬主站 RTK 是目 前可達到以最短時間獲得大量點位精確資料的一種方法,不過二者結合應用 的精度在某方面還未達到要求,因此研究如何提升二者結合應用之精度是本 文的最終目的。
第二章 研究方法與內容
2-1研究方法
三維雷射掃描儀(3D Laser Scanner 以下簡稱 3D LASER)結合虛擬主站 (Virtual Reference Station,以下簡稱 VRS)中的誤差有系統誤差與偶然誤 差,大部份來自於 VRS,其中的系統誤差包括: 1. 基準站坐標與內政部公告之 TWD97 國家坐標系統存在著區域性偏移量 (王敏雄 等,2006)。 2. 由內差而得到之虛擬參考站所存在之系統誤差量(楊名、馮倩君,2004)。 就目前研究指出內差模式所產生之系統誤差量大部分反應於高程上,且高 程的精度遠較平面精度差。本研究主要目的是在不增加其他觀測儀器與方式 下,探討如何利用 3D LASER 測量中所得到之資訊對測量成果進行誤差改正, 我們並未在減少系統誤差或演算法上作改進,而是從三維雷射掃描儀內業處 理截取多餘觀測量,利用這些多餘觀測量對觀測網進行間接觀測平差改正, 以提升各後視觀測點之精度。所謂後視點是因為其定點方式為後方交會,所 以我們通常稱這些點為後視點。就目前之研究了解三維雷射與 VRS 結合應用 之主要誤差來源應為 VRS,因為根據研究 VRS 之平面精度為 3 公分,高程精 度為 1-5 cm (G.R.Hu,2003)。而 3D LASER 之精度為 mm 級(TRIMBLE 原廠公 佈之資料 GS200 在 50 公尺內之標準誤差為 1.4mm),在 25 公尺以內之測距與 定位精度為 2mm 以內(粘基非 2005 )。目前搭配 3D LASER 之方式有四種:1. 以靜態 GPS 施測三後視點,2.以全測站搭配附近控制點測得三後視之坐標,
3. RTK,4.VRS,前兩種方式有一共同缺點即耗時且耗費人力,不符合快速 之要求。因此以 RTK 或 VRS 提供 3 個絕對點坐標做後視是較可行的方式,但 RTK 之系統誤差隨著與主站之距離增加而成線性成長,且受限於與參考站之 距離不得大於 10 公里,否則由於電離層、對流層等之影響將降低精度,加 上有初始化問題,因此本研究選擇由 VRS 搭配三維雷射掃瞄儀施測,以取得 測站之絕對坐標系統。 由上可知 VRS 之系統誤差將傳播至主測站,而主測站以雷射掃瞄之誤差將 再傳遞至待測點,由於三維雷射掃描儀擁有快速及高精度之掃描能力,可於 一秒鐘內測得數千個點,若 3 後視點含有過大誤差將傳播至數千個點,也就 是說這 3 後視點決定了所有掃瞄點的精度,因此若能降低 3 後視點之誤差, 則可提高所有施測點之精度。 在結合應用中利用 3D LASER 之施測結果以內業計算軟體 REALWORK 4.1 所 量測或計算得之距離觀測量,搭配 VRS 所測得之坐標觀測量組成間接觀測方 程,以最小二乘法求得坐標與距離之改正參數,本研究以靜態 GPS 之觀測坐 標作為對照組,將原先只須 3 個後視增加至 10 個後視,以改正前後 10 個後 視點之 VRS 觀測坐標與靜態 GPS 觀測坐標二者較差之分佈範圍與 RMS 作為精 度指標,並以 6 種平差模式進行改正,探討經過改正後的坐標與對照組比較 是否有提升後視點之精度。
2-2 研究內容
本研究之內容主要有:1.分析靜態 GPS、VRS、3D LASER、水準測量四項成果。 2.比較靜態 GPS、VRS、3D LASER、水準測量四項成果之間的差異。 3.分析由 3D LASER 內業處理軟體所能獲得之資料如何運用於平差改正。 4.分析各種平差改正之函數模型與改正後之效果,平差改正方式大致分為三 維坐標改正及平面與高程分開改正兩種方式。 整個作業分為外業與內業兩部分,其中外業含有: 1.靜態 GPS 施測 2.VRS 觀測 3.三維雷射掃瞄施測 4.水準測量等四項 內業部分含有 1.BERNESE 5.0 解算各點之坐標作為對照組 2.REALWORK 4.1 計算各點間之距離 3.平差改正計算 4.成果分析
2-3 相關研究探討
目前國內外已有許多與 VRS 及 3D LASER 相關之研究,大部分是針對其各 別之理論、演算法、精度分析與比較等,而涉及二者結合應用之分析與提升 結合應用精度之方式則尚無相關研究,茲將與本文相關之研究分述如下: 1. G.R.Hu,”Development and assessment of GPS virtual referencestations for RTK positioning” 2003,該研究以新加坡之多參考站網 路進行測試,利用寬巷法求解網中周波未定值,再以無電離層線性組合透 過卡曼濾波對 L1 載波及相對對流層天頂延遲量進行最小二乘法估計,並 加入網形約制條件以加快搜尋及確保求解之正確性,結果得知多主站 RTK 之平面精度為 3cm ,高程精度 1- 5 cm ,初始化所須時間 2 min 。 2. Dogan U,2004 在“ Testing a multiple reference station GPS network
for real-time carrier-phase-based positioning in the Marmara region”中,針對以多主站 RTK 方式產生之區域載波相位改正數與單一參 考站 RTK 比較,該研究是在土耳其之 Marmara GPS Network 內進行,結果 顯示 55-75%在觀測量方面得到改善,40-60%在即時定位精度有改善。 3.Nagihara S, Mulligan KR, Xiong W 在“Use of a three-dimensional
laser scanner to digitally capture the topography of sand dunes in high spatial resolution” ,以 Cyrax 2500 3D Laser Scanner 對
一高約 4 米,長 50 米之月牙丘進行掃描,共在其周圍掃描了 7 次,得到 數百萬個點雲資料,經過計算可得一解析度為 10 公分,精度為 6 mm 之模 型。 4.王敏雄、劉至忠、劉正倫、蕭輔導在地籍測量第 25 卷”e -GPS 衛星 基準站即時動態定位系統測量成果分析”, 2006,經過 8 個多月於台灣 中北部測試初步證實 VBS-RTK 之技術平面精度約 2 公分,高程約 5 公分, VBS-RTK 靜態外插定位在測站距離主基準站 18 公里以內時,其平面定位
精度大致可維持在 2 公分以內,但高程方向之平均定位精度約為 5 公分, 最大定位誤差則已超過 20 公分;另自外插 32 公里起,其平面及高程精度 亦隨距離增長而降低,高程定位精度之不確定性,更是大幅相對提高。 5.馮倩君、楊名在”以多參考站為基礎即時動態定位演算法”,第 23 屆測 量學術及應用研討會論文中,用卡曼濾波解算出參考站之週波未定值以建 立區域內即時性的系統誤差模式,利用此系統誤差模式以內差方式(分為 平面與雙線性)產生虛擬參考站之坐標,以此虛擬參考站與移動站進行短 基線 RTK 定位而得到移動站之坐標,其中第一組的平面分量 RMS<2cm,高 程 分 量 RMS:10~13cm , 第 二 組 的 平 面 分 量 RMS:1~4cm , 高 程 分 量 RMS:8~12cm。而以真實之觀測資料與以內差所得之虛擬資料進行比較發現 兩者極接近,不過仍有一段偏差量(平面內差 RMS:4.69cm,雙線性曲面 RMS:5.26cm),而這內差誤差所產生的影響大部分反應在高程方面,結果 證實平面定位精度在 5cm 內,高程定位精度在 15cm 內。 6.崔國強、湯俊發、陳冠翔、游佩諭,在“虛擬參考站技術於 GPS 位上之應 用研究” ,2002 中,以虛擬參考站技術比較單一參考站 RTK 與多主站 RTK,並運用廣播星曆及超快速星曆解算,在短基線網中發覺二者精度頗 為一致,緯度最大差值為 0.00022”(0.66cm), 經度最大差值為 0.00017”(0.51cm),可知在短距離基線之定位精度相當精確,而在中長 距離基線中以超快速星曆靜態解與網路 RTK 解算結果比較,當參考站產生 於移動站處時,二者經度最大差值為 0.00097”(2.91cm),緯度最大
差值為 0.00017”(0.51cm),若將參考站產生於離移動站處 5 公里處時, 二 者 經 度 最 大 差 值 為 0 . 0 0 0 0 6 ” ( 0 . 1 8 c m ) , 緯 度 最 大 差 值 為 0.00002”(0.06cm),可知虛擬主站 RTK 應用於中長距離時亦能達公分級 定位精度。 7.儲慶美、楊永上、簡裕城在” GPS 虛擬參考站系統之研究” 2004,在 彰化縣已知坐標點位上分別採用 GPS RTK 與 GPS 多主站 RTK 二種方法 施測,選擇 20 個檢核點,發現 RTK 之橫坐標與原坐標差值為 0.6-5.9 cm, 平均差值為 3.1 cm,縱坐標與原坐標差值為 0-5.6 cm,平均差值為 2 cm, 而 VRS 橫坐標與原坐標差值為 0-4.8 cm,平均差值為 1.3 cm,縱坐標與 原坐標差值為 0.1-3.0 cm,平均差值為 1.3 cm,得知以 GPS 多主站 RTK 測法其精度優於傳統 RTK。 上述 7 項相關研究以第四與第五項之成果與本研究成果較為接近,特別 是高程部分。
第三章 理論
3-1 三維雷射掃描儀之原理三維雷射掃瞄儀又稱地面光達(Ground Based LIDAR),主要是利用發射雷 射光至物體表面並接收反射波,屬於主動式探測系統,其分類方式有很多, 依雷射材料分為固體與氣體兩種,依雷射波分為脈衝式與連續波兩種,依測 距方式分為時間差與三角幾何法,三角幾何法又分單相機與雙相機,依掃瞄 方式分為橫掃式與縱掃式,依掃瞄距離又分為短、中、長三種。本研究GS200 屬於脈衝式固體雷射,測距方式為時間差量測法,掃瞄方式為縱掃式,掃瞄 距離為長距離。 時間差量測法之測距方式為利用來回時間差乘上光速即可獲得距離,時間 量度的最小單位決定距離之解析度,目前可達0.1ns,相應之距離為1.5cm, 而脈衝波的時間間隔可決定最大測量距離,然而實際最大測量距離受限於雷 射強度、目標物反射率、光束散射、大氣穿透率、及偵測器靈敏度,目前大 都在1公里之內,由公式(3-1)可知其精度與脈衝起始時間的確認及雜訊比有 關。 σr=0.5c*t 1/√s/n (3-1) 雷射波長會影響反射的能量,所觀測得的反射強度與波長有關,如用近紅 外雷射光會對植物有較強的反射。雷射的觀測有效距離是儀器重要的應用條 件,尤其對大型地物或場景的觀測,或是無法接近的地物,皆需要較長的觀 測距離。然而距離越遠的地物觀測精度越差,若要保持儀器所宣稱的測距精
度,則觀測距離需在其標準範圍內。雷射掃描儀的定位精度與測距精度、瞬 間視角(IFOV)、及水平與垂直角精度皆有關係,所以必須綜合這些所有條件 來評估雷射掃描儀。 3-2 VRS 之原理及國內 e-GPS 網建置情況 3-2.1 VRS 原理 VRS 之定位方式屬於即時動態定位,只是其應用較 RTK 不受限制,VRS 定 位技術的基本觀念是由多個 GPS 基準站全天候連續地接收衛星資料,並經由 網路或其它通訊設備與控制計算中心連接,彙整計算產生區域改正參數資料 庫,藉以計算出任一移動站附近之虛擬基準站的相關資料,所以在基準站所 構成的基線網範圍內,VRS 使用者只需在移動站上擺設衛星定位接收儀,將 相關定位資訊透過手機介面依 NMEA 格式傳回控制計算中心,控制計算中心 將資料計算後,便會算出虛擬主站之模擬觀測量,再以 RTCM 標準格式回傳 至移動站衛星定位接收儀,進行”超短距離”之 RTK 定位解算,進而即時求 得公分級精度定位坐標。 由上我們可以發現 VRS 不受距離限制,只要在 e-GPS 網內均可施測,其 規模遠較 RTK 大,且有許多優點是將 RTK 之缺點改善而得到的。整個 VRS 系 統的運作包含以下四部分: 1.基準站:係於測區範圍內,平均 50-70 公里建立一個基準站,這些基準站 將組成一規則網形,每個基準站全天候連續地接收衛星資料。 2.控制及計算中心:主要工作為載入各基準站原始觀測量之與品質檢核、
RINEX& RINEX 壓縮資料之儲存與管理、天線相位中心改正、系統誤差之計 算模組與更新、移動站近似位置計算、產生虛擬主站之觀測資料、傳送 RTCM 資料之移動站。資料中心配置一部路由器(Router)連結基準站之網站、一 部較高速之電腦主機進行數據運算,同時為提供多個移動站透過行動電話 GSM/GPRS 系統撥接上網之服務。 3.移動站:只要是在網內可於任意點擺設,在基準站之基線網內,只須在移 動站擺設接收儀,並透過手機介面依 NMEA 格式傳回控制計算中心,控制計 算中心將資料計算後,便會算出虛擬主站之模擬觀測量,進而求得移動站 坐標。 4.軟體:有即時下載 DECODE 模組、BS 監控站模組、自動轉撥器移動站下載 模組、e-GPS 網管程式模組、VRS 計算模組、自動下載精密星曆模組。根據 移動站之概略坐標,利用系統誤差模式以內插方式產生虛擬主站,以此虛 擬主站與移動站進行短基線 RTK。 3-2.2 國內 e-GPS 網建置情況 內政部土地測量局自 93 年度起規劃建置全國性 e-GPS 衛星定位基準站即 時動態定位系統,以 TRIMBLE 公司之 GPSNET 系統軟體計算區域性改正參數 (Area Correction Parameters,ACP),各基準站間距離以不超過 50 公里 為原則,自 93 年度起編列經費,至 95 年度止預計於臺灣本島及澎湖、金 門、綠島、蘭嶼等離(外)島地區建置 79 處基準站,包括 93 年度建置臺 灣本島北部地區 23 處基準站,94 年度建置臺灣本島北部地區 20 處基準站,
95 年度建置離(外)島及加密臺灣本島地區計 36 處基準站,各基準站分布 情形詳如圖 3-1。 圖 3-1 台灣地區含離島 e-GPS 基準站建置圖(王敏雄等,2006) 圖 3-1 中所示藍色區域為北區,以清雲科技大學為控制計算中心,粉紅色 部分屬於南區,以成大衛星中心為控制計算中心。本定位系統以縣為單位共 分為 8 個定位服務子網,包括 7 處區域性定位服務網及 1 個全區性 DGPS 定 位服務網等,分布情形詳如下圖 3-2。 已連線運作基準站(45處) 未連線運作基準站(4處) 95年度待建置基準站(28處)
•
94 年度建置臺灣南部地區 95 年度建置離(外)島地區 高峰 信義 草屯 二林 台中港 東勢 玉里 豐濱 鳳林 壽豐 和平 蘇澳 武陵 竹南 南寮 復興 石門 觀音 淡水 貢寮 成功 富岡 太麻里 大武 綠島 枋寮 高雄港 台南市 旗山 瑪家 烏山頭 東石 竹崎 桃源•
93 年度建置臺灣北部地區 墾丁 北港 田中 和美 小琉球 蘭嶼 霧鹿 宜蘭 棲蘭 合歡山 泰安 通霄 埔里 玉山北峰 新店 新城 光復 萬榮 西嶼 湖西 吉貝 金湖 烈嶼 料羅 金沙 莒光 東引 北竿 南竿 七美 北門 逢甲 龍洞 中壢 已連線運作基準站(45處) 未連線運作基準站(4處) 95年度待建置基準站(28處)•
94 年度建置臺灣南部地區 95 年度建置離(外)島地區 高峰 信義 草屯 二林 台中港 東勢 玉里 豐濱 鳳林 壽豐 和平 蘇澳 武陵 竹南 南寮 復興 石門 觀音 淡水 貢寮 成功 富岡 太麻里 大武 綠島 枋寮 高雄港 台南市 旗山 瑪家 烏山頭 東石 竹崎 桃源•
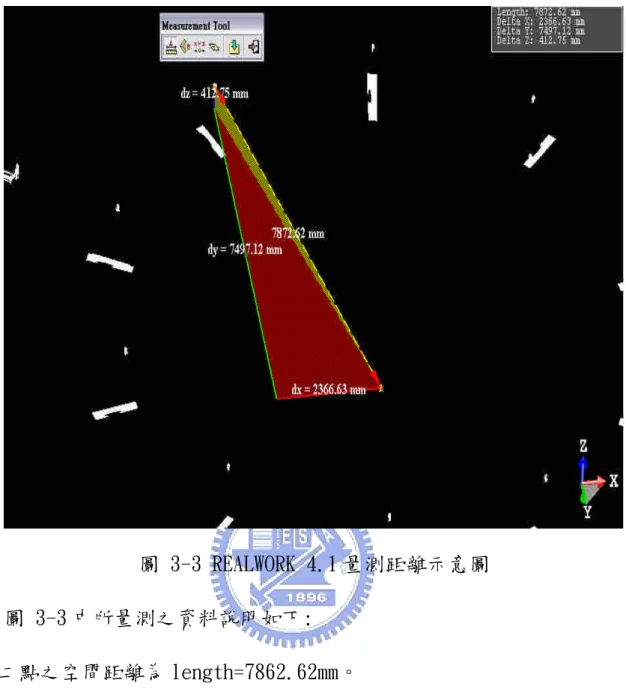
93 年度建置臺灣北部地區 墾丁 北港 田中 和美 小琉球 蘭嶼 霧鹿 宜蘭 棲蘭 合歡山 泰安 通霄 埔里 玉山北峰 新店 新城 光復 萬榮 西嶼 湖西 吉貝 金湖 烈嶼 料羅 金沙 莒光 東引 北竿 南竿 七美 北門 逢甲 龍洞 中壢圖 3-2 臺灣本島地區 VRS-RTK 定位服務範圍圖(王敏雄等,2006) 3-3 提升三維雷射掃描儀與 VRS 結合應用精度之理論基礎 由 3D LASER 掃描後視點或地物特徵點後,其點位資料將儲存於電腦中供 內業分析處理,在 REALWORK4.1 之軟體中我們可以量距工具測量各點間之距 離,也可以量測施測網形中的各夾角,及 dX,dY,dZ 如下圖所示, 北區服務網 North 中區服務網 Middle 西區服務網 West 南區服務網 South 宜蘭服務網 East_South 花蓮服務網 East_Middle 台東服務網 East_South 高峰 信義 草屯 二林 東勢 玉里 豐濱 鳳林 壽豐 和平 蘇澳 武陵 竹南 南寮 復興 龍洞 觀音 淡水 貢寮 成功 富岡 太麻里 大武 枋寮 高雄港 台南市 旗山 瑪家 烏山頭 東石 竹崎 桃源 北港 田中 和美 霧鹿 宜蘭 新城 光復 萬榮 石門 台中港 北門 棲蘭 玉山北峰 泰安 通霄 新店 埔里 逢甲 中壢 合歡山 延平 墾丁 北區服務網 North 中區服務網 Middle 西區服務網 West 南區服務網 South 宜蘭服務網 East_South 花蓮服務網 East_Middle 台東服務網 East_South 高峰 信義 草屯 二林 東勢 玉里 豐濱 鳳林 壽豐 和平 蘇澳 武陵 竹南 南寮 復興 龍洞 觀音 淡水 貢寮 成功 富岡 太麻里 大武 枋寮 高雄港 台南市 旗山 瑪家 烏山頭 東石 竹崎 桃源 北港 田中 和美 霧鹿 宜蘭 新城 光復 萬榮 石門 台中港 北門 棲蘭 玉山北峰 泰安 通霄 新店 埔里 逢甲 中壢 合歡山 延平 墾丁
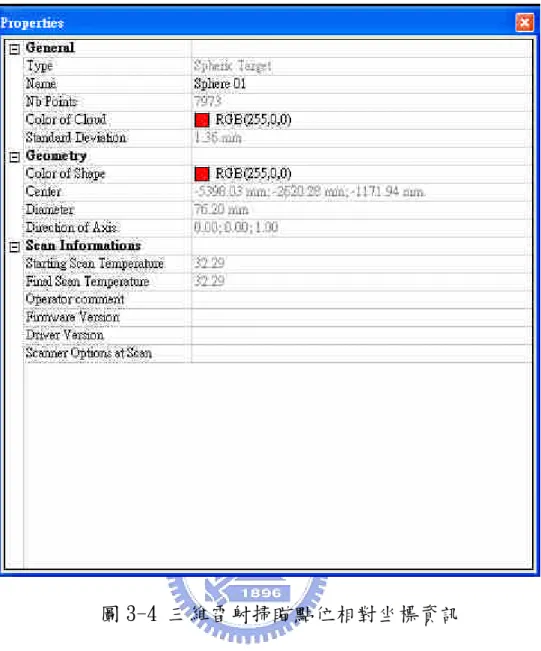
圖 3-3 REALWORK 4.1 量測距離示意圖 圖 3-3 中所量測之資料說明如下: 1.二點之空間距離為 length=7862.62mm。 2.dX,dY,dZ 代表二點在以測站為中心之坐標系中之各分量差,其中顯示 dX=2366.63mm,dY=7497.12mm,dZ=412.75mm。 另外在 REALWORK 內業處理軟體中我們也可以取得各點之相對坐標,如下 所示:
圖 3-4 三維雷射掃瞄點位相對坐標資訊 圖 3-4 中相關資訊說明如下:
Type 為目標物之型態,本目標物為球,Name:為施測時給予該點之編號,
本點為 sphere 01,Standard divation:1.36mm,為該點掃瞄成果之內部精 度評估。Center:-5398.03;-2620.28;-1171.94mm,為該目標點之中心坐 標,若未事先建立坐標系,則會以測站為原點為坐標系。Dimeter 為後視球 之直徑,starting scan temperature 為開始掃瞄之儀器內部溫度,final
scan temperature 為掃瞄結束時之儀器內部溫度。
間之距離,二為由上述所示之相對坐標反算距離,後者之精度高於前者,主 要是在軟體中選取點時會有人為誤差的問題,本研究之基線距離使用後者所 算得之數據。而由此所量得之距離精度將高於由 VRS 所測得之坐標反算之距 離,藉由排列組合知每兩點組成一條線,若有 n 個後視點,其線段組合公式 為 n(n-1)/2,加上測站至各點則有 n(n-1)/2+n 個距離觀測量;另外我們也可 以再利用量測角度之工具測得各線段之夾角,但本研究並未使用此項觀測 量。而 dx,dy,dz 之資訊由於 3D LASER 掃描之坐標系為自由測站坐標,因此 dx,dy 與 N,E 方向不同,須經過轉換後才可使用。至於 dz 則應與高程同方 向,可利用 dz 來求取各點之高程差,本研究亦將 3D LASER 所測得之 dz 與 水準測量以及 VRS 所得之高程差作比較,探討在有一點已知點之情況下,是 否可以 dz 來求取其他點之高程。 3-4 平差改正模式探討 本觀測之誤差來源在排除粗差之後還含有以下三項: 1.VRS 之系統誤差,主要是 e-GPS 基準站使用之 TWD97 坐標與內政部公告之 坐標間存在區域性之差異,以及系統誤差模型內差時所產生之殘差,大部 分反應於高程項。 2.3D LASER 之系統誤差,主要與距離成正比 3.偶然誤差。 本研究之觀測量計有距離與坐標二種觀測量,屬於間接觀測,而由於距離 觀測量與坐標觀測量二者精度相差甚多,其權值約為 100: 1,因此若要將距
離視為無誤差以條件觀測進行平差改正應無不可,不過本研究僅使用間接平 差模式。 為了增加觀測量,我們將原先只須 3 個後視增加到 10 個後視,由 10 個後 視與測站本身組成一觀測網,由上述之觀測量知有距離與坐標兩種觀測量, 雖然距離之觀測量在後視點多於 7 個以上時即已多於必要觀測量,但如此之 觀測網為一秩虧自由網,須有起算點或其他約制條件,而加入坐標觀測量後 即不再有秩虧之問題,因此就以上之問題而言本研究可以有多種平差模式, 資分述如下: 1. 使用距離觀測量但加入起算點或其他約制條件,為間接帶有約制條件之 平差。 2. 使用距離與坐標觀測量,不須起算點或其他約制條件,為間接平差。 3. 由於距離觀測量與坐標觀測量之權值相差甚大,若將距離視為已知條件 則為條件觀測平差。 本研究僅使用第二種方式,觀測類型屬於距離型的間接觀測,而其數學 模式為 L=f(X,Y,Z)=√(ΔX2+ΔY2+ΔZ2) (3-2) 隨機模式為 L+V=√(Δx2+Δy2+Δz2 ),L 為各點間之距離,X,Y,Z 為各點之坐 標,上式為非線性方程,須化為線性方程,以 Taylor 展開式展開得線性方 程:
L=f(Xi0,Xj0,Yi0,Yj0, Zi0,Zj0)+ 二次以上各項 ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( 0 0 0 0 0 0 0 0 0 0 0 0 j j j i i i j j j i i i j j j i i i Z Z Z f Z Z Z f Y Y Y f Y Y Y f X X X f X X X f (3-3)
其中 X0i,Y0i,Z0i,X0j,Y0j,Z0j在誤差方程中視為進似值或起始值,此處
我們以各點之 VRS 坐標觀測量代入,
Xi,Yi,Zi,Xj,Yj,Zj是各點坐標之最或是值,令
Xi=X0i+xi,Yi= Y0i+yi,Zi= Z0i+zi,XJ= X0j+xj,YJ= Y0j+yj,ZJ= Z0j+zj
xi,yi,zi,xj,yj,zj,為其改正參數, 最後寫成如下型式: L=Lij+Vij=LIJ 0 + j j i i j j i i j j i i z Z f z Z f y Y f y Y f x X f x X f 0 0 0 0 0 0 ( ) ( ) ( ) ( ) ( ) ) ( (3-4) 將二次項以上忽略不計,再以迭代方式計算。最後可寫成 V=AX-L 之間接 觀測方程而進行改正參數求解,於實際計算時約 2-3 次迭代即已收斂。
其中 Vn V V V n Vn V V V V 3 2 1 ~ 1 ... ... 3 ~ 2 3 ~ 1 2 ~ 1 (3-5) 為距離與坐標觀測量之改正參數,V1~2…..Vn-1~n 為距離觀測量之改正參數, V1………Vn為坐標觀測量之改正參數。 而若是使用條件平差,則其數學模式如下: 0 W V B T (3-6) 上式之W 為以 VRS 所測之坐標反算距離與 3D LASER 所測距離之差分。 3-5 權值設定與精度指標 由於權與中誤差平方成反比,本研究因觀測方式不同,其權也不同,共有 距離,平面坐標及高程三種權值,其設定如下: 距離: 3D LASER 之精度在 25 公尺以下經測試為±1.4mm N、E:VRS 之平面精度為±30mm H:VRS 之高程精度為±50mm 依據上述標準,我們設定先驗權為其精度的倒數平方,又因各觀測量為獨 立觀測,故其關聯值為 0。由上述權值設定可知距離與坐標之權相差甚大,
經最小二乘法改正後其距離的改正量將甚小,大部分的改正量將反應於坐 標上,而實際計算結果也是如此。 在指標方面本研究以靜態 GPS 施測之成果為對照組,以改正前後之 VRS 與靜態 GPS 坐標較差之 RMS 與分佈範圍 RANGE 為精度指標,並加入改善率 以分析其改正效果,所謂改善率之定義如下: 改善率=(改正前 RMS-改正後 RMS)/ 改正前 RMS (3-6)
第四章 實驗部分
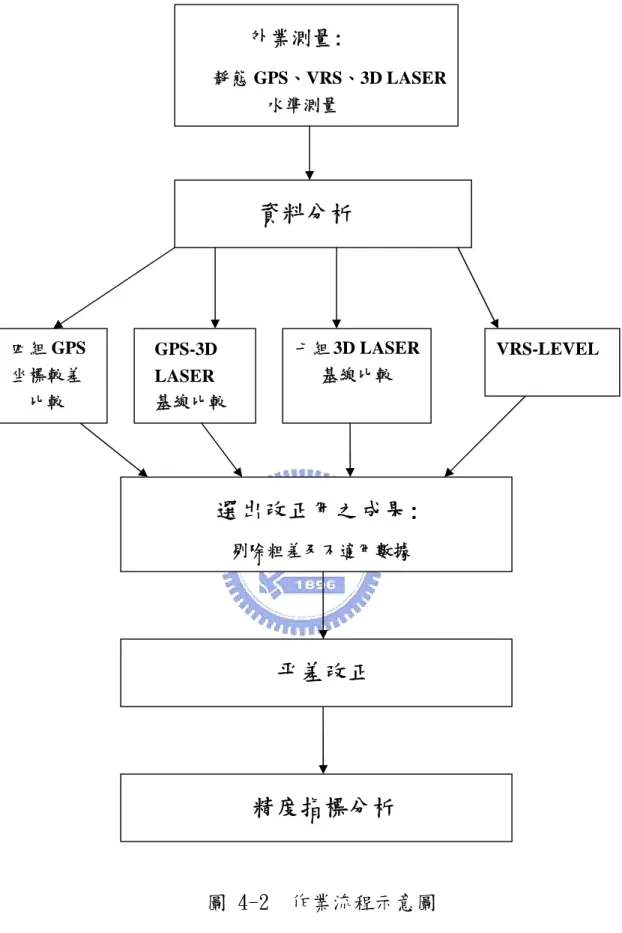
4-1 本研究採用之儀器規格 靜態 GPS 部分使用 TRIMBLE 5700 施測,計算軟體使用 BERNESE 5.0 版, 主站分別使用工研院之固定站 TNML、TCNS,陽明山固定站,北區 e-GPS 網 中之主站 FUSN 與 JUNA 進行約制,經計算與成果分析後挑選出最適合之成 果作為對照組,TRIMBLE 5700 之規格與性能見附錄一。 三維雷射使用 TRIMBLE MENSI GS200 施測,其規格與性能見附錄二。 VRS 使用 TRIMBLE 5800 為移動站,以清雲科大之計算中心提供參考站資料, 其規格與性能大致上與 5700 相同,見附錄三。 4-2 實驗場說明 實驗場如下圖 4-1, 圖 4-1 施測點位平面分佈圖 實驗場位於交大工二館頂樓 GPS 固定站旁,為一內切於半徑為 6.0m 圓之正 10 邊型,分別將其各角點編號為 1、2、3...10,點 1-10 為後 視點,以 VRS、3D LASER、GPS 施測以比對其精度,圖 4-1 中圓心為 P0,P1 為待測點及另一測站點 P2,3D LASER 分別架設於 P0 與 P2 上對 1-10 施測, P2 距離 P0 為約 10m,待測點 P1 作為比對點,距離 P0 為約 15m,P1 係為了 後續分析結合應用之精度,本文尚未作此分析。選擇後視距離測站點為 6 公尺主要是為了使 3D LASER 之精度最佳,而一般實際狀況後視點通常設置 範圍也大都以不距離測站太遠為主。 4-3 實驗進行步驟與方法 4-3.1.外業測量與整體作業流程:其進行步驟如下 1.靜態 GPS 施測,以靜態 GPS 施測點 1-10,每個點施測 3 小時以上,而 P0 P1、P2 因為是測站點與比對點,則須作 10 小時以上之觀測。 2.VRS 施測點 1-10、P0、P1、P2 共 13 個點。 3.3D LASER 測量,儀器置於中心點 P0,掃瞄正 10 邊型各點與 P1,P2。 4.3D LASER 測量,儀器置於中心點 P2,掃瞄正 10 邊型各點與 P0,P1。 5.水準測量測得各點位之高程差,與 3D LASER 之 dZ 及 VRS 所測得之高程 差進行比較,以水準測量為對照組。 整體作業流程示意圖如下:
圖 4-2 作業流程示意圖 外業測量: 靜態 GPS、VRS、3D LASER 水準測量
資料分析
四組 GPS 坐標較差 比較 GPS-3D LASER 基線比較 七組 3D LASER 基線比較 VRS-LEVEL選出改正用之成果:
剔除粗差及不適用數據平差改正
精度指標分析
4-3.2.內業成果分析方法 其進行步驟與方式如下: 1.計算以靜態 GPS 所測量之點坐標,以不同固定站進行約制,選出最適之 組別,以此坐標作為對照組。 2.從 3D LASER 之成果中量取各點間之距離共 45 筆,針對不同組成果相互 比較其間之較差,並與靜態 GPS 所測得之基線長度比較,剔除粗差之成 果,選取適合比對之組別。 3.比較 VRS 與 GPS 施測成果之較差。 4.3D 模式:按 3-4 節所述之方式進行平差改正,首先以 3D 坐標直接代入。 5.2D+1D 模式:即將平面與高程分開改正,並再分為無固定點觀測網與有單 一固定點之觀測網兩種方式,其中無固定點觀測網再分成 3 後視與 10 後視兩種方式,以分析增加後視是否為必要。 6.高程部分使用 3D LASER 之 dZ,與 VRS 所測得之各點高程差比較,探討配 合已知點高程改正之可行性。 7.比較改正後之 VRS 與靜態 GPS,以其較差之 RMS 及 RANGE 為精度之指標, 以改正量及改善率分析成效。
至於平差改正模式分類我們以下圖表示: 圖 4-3 平差改正模式示意圖 如上圖 4-3 所示,本研究之模式細分為六:一為 3D 單點固定,二為 3D 無 固定點,三為 2D 單點固定,四為 2D 無固定點(三後視),五為 2D 無固定點 (十後視),六為高程改正。
平差改正
3D 坐標改正 平面坐標改正 高程改正 模式 6 單點固定 模式 1 無固定點 模式 2 單點固定 模式 3 無固定點 3 後視點 模式 4 10 後視點 模式 5 以 RMS 及 RANGE 為指標分析改正前後之差別第五章 研究成果與分析比較 5-1 靜態 GPS 成果 我們於 2006 年 4 月 14 日至 4 月 17 日針對 13 點施測靜態 GPS,分別以陽 明山固定站、竹南站、復興站及工研院量測中心 TNML、TCNS 約制進行基線 解算,其中 TNML 與 TCNS 所解得之成果幾乎相同,因此只取用 TNML 之成果, 詳細坐標成果參閱附錄四。 5-2 靜態 GPS 成果比較分析 由於靜態 GPS 觀測之精度與基線長度成反比,因此我們選擇距離最近之 工研院 TNML 為主站約制所解出之成果為基準作為對照組進行比對分析。以 下是其他三組解算成果與工研院 TNML 之較差表,其中較差比較大者以粗體 數據表示之:
1.TNML-YM 靜態 GPS 較差 表 5-1 TNML-YM 靜態 GPS 較差(單位:公尺) 上表為以 TNML 及 YMNM 為主站所解得靜態 GPS 坐標之較差表,我們可發現 只有點 1 與點 2 之 H 值較差較大,為 2.7cm 與 2.8cm。 TNML-YM 較差 NO N E H 1 -0.0011 +0.0007 -0.0266 2 -0.0006 -0.0004 +0.0279 3 -0.0005 +0.0015 +0.0038 4 +0.0013 -0.0001 -0.0068 5 +0.0029 -0.0023 -0.0058 6 +0.0008 +0.0005 -0.0117 7 -0.0008 +0.0014 +0.0082 8 -0.0013 +0.0012 +0.0053 9 +0.0006 +0.0012 +0.0029 10 +0.0003 -0.0005 -0.0036 p0 +0.0005 +0.0004 -0.0012 p1 +0.0006 -0.0005 +0.0015 p2 -0.0016 +0.0023 +0.0003
2. TNML-FUSN 靜態 GPS 較差 表 5-2 TNML-FUSN 靜態 GPS 較差(單位:公尺) TNML-FU 較差 NO N E H 1 -0.0025 -0.0380 +0.0835 2 +0.0059 -0.0170 +0.0104 3 +0.0095 -0.0130 +0.0141 4 +0.0047 -0.0114 +0.0026 5 +0.0065 -0.0142 -0.0254 6 +0.0050 -0.0103 -0.0111 7 +0.0079 -0.0136 -0.0022 8 +0.0046 -0.0123 -0.0001 9 +0.0031 -0.0117 -0.0130 10 +0.0058 -0.0120 -0.0071 p0 +0.0058 -0.0126 -0.0042 p1 +0.0060 -0.0128 -0.0012 p2 +0.0025 -0.0104 -0.0076 上表為以 TNML 及 FUSN 為主站所解得靜態 GPS 坐標之較差表,只有點 1 之 E 與 H 值較差較大,為 3.8cm 與 8.4cm,超過容許值。
3.TNML-JUNA 靜態 GPS 較差 表 5-3 TNML-JUNA 靜態 GPS 較差(單位:公尺) 上表為以 TNML 及 JUNA 為主站所解得靜態 GPS 坐標之較差表,同樣只有點 1 之 E & H 值較差較大,為 2.7cm 與 8.3cm,超過容許值,類似 FUSN 站之結 果。 分析:比較上述四不同固定站之解算結果,其 N、E 之差值大部分在 1cm 以 下,唯 H 部分有較大較差出現,其中陽明山解算之結果無論是在 N、E 或 H 值均與 TNML 之結果甚接近,這一點更證實了 e-GPS 主站所採用之 TWD97 坐 標與內政部公告之 TWD97 坐標有區域性之偏移量。 TNML-JUNA 較差 NO N E H 1 -0.0087 -0.0270 +0.0826 2 -0.0010 -0.0064 +0.0132 3 +0.0031 -0.0021 +0.0140 4 -0.0008 -0.0035 +0.0008 5 +0.0010 -0.0056 -0.0168 6 -0.0004 -0.0020 -0.0014 7 +0.0050 -0.0068 -0.0045 8 +0.0034 -0.0017 +0.0164 9 +0.0005 -0.0019 -0.0035 10 +0.0012 -0.0014 +0.0017 p0 +0.0035 -0.0027 +0.0000 p1 -0.0004 -0.0018 -0.0028 p2 +0.0006 -0.0002 -0.0023
5-3 VRS 成果 由於 VRS 之施測功能中可設定精度門檻值與次數,因此本研究共施測 6 組不同設定之資料,將各組分別以不同精度門檻值與不同觀測次數設定主 要之目的有二,即是比較其內部精度評估準確否及設定較大之門檻值以便 讓較大誤差之觀測量進入,如此方能看出平差效果,各組 VRS 所測得之成 果見附錄五。我們分別於 2006 年 3 月 27 日、3 月 28 日、3 月 29 日、3 月 30 日施測,其中 0327 因基站資訊中斷及下雨僅測得 p0、p1,故捨棄 0327 之資料,而由於後來發現在高程方面與靜態 GPS 之較差較大,故於 6 月 15 再 施 測 以 確 認 在 前 幾 筆 資 料 施 測 過 程 中 並 無 天 線 高 設 定 錯 誤 或 人 為 疏失,各觀測資料及其精度設定如下表 5-4: 表 5-4 VRS 施測設定表 表 5-4 所示第一組與第二組之平面與高程精度門檻相同,為 5800 之預設 值,由於 VRS 係不間斷地接收資料,施測次數表示在收到多少筆資料後所 取得之平均值,第一組與第二組之差別僅在次數,第一組為 20 筆資料之平 施測組別 平面精度 門檻設定 高程精度 門檻設定 施測次數 設定 代號 第一組 1.5CM 2CM 20 0328 第二組 1.5CM 2CM 180 0328-180 第三組 3CM 3CM 20 0329 第四組 1CM 1CM 20 0330A1 第五組 5CM 5CM 10 0330A5
均,為預設值,第二組為 180 筆資料之平均,第三組之平面與高程精度門 檻均設為 3cm,施測次數為預設值 20,第四組之平面與高程精度門檻均設 為 1cm,施測次數為預設值 20,第五組之平面與高程精度門檻均設為 5cm, 施測次數為預設值 20。 5-4 3D LASER 掃瞄成果 為了獲得多組不同的觀測成果及分析因測站或後視球不同擺設位置之影 響,我們於 2006 年 3 月 24 日、3 月 26 日、3 月 30 日、4 月 07 日施測,其 中將測站分別架設於 P0 及 P2,且後視球分別置於地面點上與腳架上,共得 七組資料,其施測方式如下表 5-5 所示: 表 5-5 三維雷射施測方式 3D LASER 施測方式 組別 第一組 第二組 第三組 第四組 第五組 第六組 第七組 施測 日期 2006 /3/24 2006 /3/24 2006 /3/26 2006 /3/26 2006 /3/30 2006 /3/30 2006 /4/7 掃瞄儀 位置 P0 P0 P2 P2 P0 P2 P2 後視球 位置 地面 腳架 地面 腳架 腳架 腳架 腳架 代號 0324G 0324T 0326G 0326T 0330P0 0330P2 0407
上表 5-5 中我們分別依施測日期之先後順序編為一至七組,由內業處理 軟體量測點與點間之基線,此處所指之基線為各點間之空間距離,即斜距。 我們發現第三組、第四組、第六組所測得之三組基線與其他組基線有較大 之較差出現,且與靜態 GPS 所測得之基線比對也是如此,因此將其剔除, 僅剩四組資料,為了選擇一組最適用數據,將剩餘之四組 3D LASER 與 GPS 所 測得之基線作比較如下: 1.第一組 3D LASER-GPS 基線較差比較 第一組3D-GPS -10.000 -5.000 0.000 5.000 10.000 15.000 1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 基線 較差 0324G 圖 5-1 第一組 3D LASER-GPS 基線較差柱狀圖(單位:mm) 在比較分析時我們將 13 個點所組成基線全計入,但於改正時則只將 10 個後視點之基線計入,上述之後視點及測站共 13 個點可組成 78 條基線, 第一組較差之 RMS=±4.3mm,Max=11.1mm,Min=-8.7mm。
2.第二組 LASER-GPS 基線較差比較 第二組3D-GPS -30.000 -20.000 -10.000 0.000 10.000 20.000 30.000 1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 基線 較差 0324T 圖 5-2 第二組 3D LASER-GPS 基線較差柱狀圖(單位:mm) 第二組較差之 RMS=±9.2mm,Max=26.4mm,Min=-19.8mm。 3. 第五組 LASER-GPS 基線較差比較 第五組3D-GPS -20.000 -10.000 0.000 10.000 20.000 1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 基線 較差 0330 圖 5-3 第五組 3D LASER-GPS 基線較差柱狀圖(單位:mm) 第五組較差之 RMS=±6.2mm,Max=14.3mm,Min=-16.1mm
4.第七組 LASER-GPS 基線較差比較 第七組3D-GPS -20.00 -10.00 0.00 10.00 20.00 1 5 9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 基線 較差 0407 圖 5-4 第七組 3D LASER-GPS 基線較差柱狀圖(單位:mm) 第七組較差之 RMS=±6.2mm,Max=16.1mm,Min=-14.3mm。 說明:由上可見四組資料除了第二組差距較大外,其餘三組與 GPS 之差距大 都在±1.5cm 內,其中以第一組之差距最小,約在±1.0cm 內,因此選擇以第 一組所測得之資料進行改正。 5-5 靜態 GPS 成果與 VRS 成果比較分析 首先我們先了解 VRS 與靜態 GPS 所測得之坐標間之差異,以圖表示之如下:
1.第一組 VRS-GPS 第一組VRS-GPS -200.0000 -150.0000 -100.0000 -50.0000 0.0000 50.0000 1 2 3 4 5 6 7 8 9 10 11 12 13 後視點 較差 N E H 圖 5-5 第一組 VRS-GPS 坐標較差示意圖(單位:mm) 圖中橫軸 1-10 即點 1-10,11 為 P0,12 為 P1,13 為 P2,因為作較差分 析,所以 P0~P2 也計入分析,在下節改正成果分析時則只針對 1-10 點,第 一組 VRS-GPS 坐標較差之指標如下: Range:dN:+0.7~16.4mm,dE=-7~+10.6mm,dh:-81.2~-147.5mm。 RMS:N=±10.9mm,E=±5.5mm,h=±112.9mm。
2.第二組 VRS-GPS 第二組VRS-GPS -250.0000 -200.0000 -150.0000 -100.0000 -50.0000 0.0000 50.0000 1 2 3 4 5 6 7 8 9 10 11 12 13 後視點 較差 N E H 圖 5-6 第二組 VRS-GPS 坐標較差折線圖(單位:mm) 第二組 VRS-GPS 坐標較差之指標如下: RNAGE: dN:-13~12mm dE=-19.7~+10.1mm dh:-90.4~-203.5mm RMS:N=±7.3mm,E=±8.8mm,h=±148.8mm。
3.第三組 VRS-GPS 第三組VRS-GPS -200.0000 -150.0000 -100.0000 -50.0000 0.0000 50.0000 1 2 3 4 5 6 7 8 9 10 11 12 13 後視點 較差 N E H 圖 5-7 第三組 VRS-GPS 坐標較差折線圖(單位:mm) 第三組 VRS-GPS 坐標較差之指標如下: RNAGE: dN:-14.1~+11mm dE=-17.1~+5.1mm dh:-79.2~-145.4mm RMS:N=±8.5mm,E=±7.2mm,h=±130.2mm
4.第四組 VRS-GPS 第四組VRS-GPS -250.0000 -200.0000 -150.0000 -100.0000 -50.0000 0.0000 50.0000 1 2 3 4 5 6 7 8 9 10 11 12 13 後視點 較差 N E H 圖 5-8 第四組 VRS-GPS 坐標較差折線圖(單位:mm) 第四組 VRS-GPS 坐標較差之指標如下: dN:-42.5~+1.7mm dE=-12~+14.3mm dh:-95.3~-236.4mm RMS:N=±26.0mm,E=±7.8mm,h=±188.7mm
5.第五組 VRS-GPS 第五組VRS-GPS -250.0000 -200.0000 -150.0000 -100.0000 -50.0000 0.0000 50.0000 1 2 3 4 5 6 7 8 9 10 11 12 13 後視點 較差 N E H 圖 5-9 第五組 VRS-GPS 坐標較差折線圖(單位:mm) 第五組 VRS-GPS 坐標較差之指標如下: RNAGE: dN:-30.3~+33.8mm dE=-12~+13.1mm dh:-75.4~-222.1mm RMS:N=±23.4mm,E=±7.3mm,h=±170mm 綜合分析:由上可發現,第四組雖然門檻設定較高,但其與 GPS 之差異並未 因此較小,與第五組差不多,因此研判 VRS 之精度與不同時間之施測有關, 可能是電離層與對流層在不同日期差異造成不同內差模式之問題,而 N、E 之較差大部分在 2cm 之內,與土測局之成果相符,但 H 很明顯可看出為一
系統誤差,幾乎都在 10cm 以上,而這也符合土測局所測之成果即新竹區有 全省最大之高程偏移量 3.8cm。 5-6 3D 坐標平差改正成果分析 以下針對五組 VRS 成果依上述之 6 種改正方式比較改正前後之差異,首 先討論使用 3D 坐標改正之效果,其中分為單點固定及無固定點兩種方式資 分述如下。 5-6.1 3D 改正模式 1.單點固定: 所謂單點固定是以第 10 點為固定點,將其 GPS 坐標視為已知值代入,在此 我們不考慮有系統誤差而將 VRS 之成果進行間接觀測平改正,因此在此模 式下 10 點中第 10 點之改正量為 0,其中之設計矩陣由於有 66 個觀測量, 27 個未知數,故以間接平差改正其係數矩陣維度為 66X27。 2.無固定點: 算法同上述只是沒有使用固定點,全以 VRS 坐標代入進行改正,其中之設 計矩陣由於有 75 個觀測量,30 個未知數,故以間接平差改正其係數矩陣維 度為 75X30。 我們以 RMS 及較差 RANGE 為指標,資將兩種方式改正前後之精度分組以表 列之方式示之。
5-6.2 3D 改正成果 1.第一組改正成果 表 5-6 3D 模式第一組改正成果(單位:mm)
3D 單點固定
3D 無固定點
施測 組別 精度 指標 N E H 施測 組別 精度 指標 N E H 16.4 10.6 -81.2 16.4 10.6 -81.2 RANGE 2.5 -7.0 -147.5 RANGE 2.5 -7.0 -147.5 第一組 改正前 RMS 12.5 5.6 117.8 第一組 改正前 RMS 12.3 5.6 115.8 10.5 3.5 -65.4 17.4 3.5 -31.8 RANGE -4.6 -5.5 -129.6 RANGE 3.5 -4.9 -165.3 第一組 改正後 RMS 6.3 2.9 97.2 第一組 改正後 RMS 12.1 2.1 120.2 說明: 單點固定模式:平面精度有較顯著的提升,N 值 RMS 由 12.5mm 降至 6.3mm, 改善率 49.8%,E 值由 5.6mm 降至 2.9mm,改善率 48.2%,就改正量及改 善率而言算是成功。H 值 RMS 由 117.8mm 降至 97.2mm,改善率 17.5%,雖 然已經減少,但並未合乎要求。 無固定點模式: N 值無明顯變化,由 12.3mm 降至 12.1mm,改善率 1.6%, E 值由 5.6mm 降至 2.1mm,改善率 62.5%,H 值 RMS 由 115.8mm 增至 120.2mm, 改善率-3.8%。2.第二組改正成果 表 5-7 3D 模式第二組改正成果(單位:mm)
3D 單點固定
3D 無固定點
施測 組別 精度 指標 N E H 施測 組別 精度 指標 N E H 12.8 5.7 -128.4 12.8 10.1 -128.4 RANGE -13.0 -19.7 -203.5 RANGE -13.0 -19.7 -203.5 第二組 改正前 RMS 8.2 9.8 162.2 第二組 改正前 RMS 8.0 9.8 160.8 9.0 4.1 -92.2 15.4 3.3 -73.7 RANGE -6.0 -4.4 -202.6 RANGE -19.4 -14.2 -296.8 第二組 改正後 RMS 5.0 3.4 145.5 第二組 改正後 RMS 10.3 7.6 175.6 說明: 單點固定模式:N 值由 8.2mm 降至 5.0mm,改善率 39.0%,E 值由 9.8mm 降 至 3.4mm,改善率 65.3%,H 值 RMS 由 162.2mm 降至 145.5mm,改善率 10.3%; 無固定點模式:N 值由 8.0mm 增加為 10.3mm,改善率-28.8%,E 值由 9.8mm 降至 7.6mm,改善率 22.4%, H 值 RMS 由 160.8mm 增至 175.6mm,改善率 -9.2%。高程效果同第一組,單點固定有提升,但無固定點反而降低。3.第三組改正成果 表 5-8 3D 模式第三組改正成果(單位:mm)
3D 單點固定
3D 無固定點
施測 組別 精度 指標 N E H 施測 組別 精度 指標 N E H 11.0 5.1 -79.2 11.0 5.1 -79.2 RANGE -14.1 -17.1 -145.4 RANGE -14.1 -17.1 -145.4 第三組 改正前 RMS 9.0 8.2 130.0 第三組 改正前 RMS 8.6 8.0 128.3 10.2 4.5 -82.3 6.9 2.7 -87.3 RANGE -13.2 -14.7 -140.7 RANGE -15.1 -13.3 -141.5 第三組 改正後 RMS 7.1 6.8 108.5 第三組 改正後 RMS 6.5 5.5 127.8 說明: 單點固定模式:N 值由 9.0mm 降至 7.1mm,改善率 21.1%,E 值由 8.2mm 降 至 6.8mm,改善率 17.1% ,H 值 RMS 由 130.0mm 降至 108.5mm,改善率 16.5%,就改正量與改善率而言均不明顯,應該是因為本來較差就不大之 故。 無固定點模式:N 值由 8.6mm 降至 6.5mm,改善率 24.4%,E 值由 8.0mm 降 至 5.5mm,改善率 31.3%,H 值 RMS 由 128.3mm 降至 127.8mm,改善率 0.4%。4. 第四組改正成果 表 5-9 3D 模式第四組改正成果(單位:mm)
3D 單點固定
3D 無固定點
施測 組別 精度 指標 N E H 施測 組別 精度 指標 N E H -8.2 14.3 -161.5 -8.2 14.3 -161.5 RANGE -42.5 1.0 -236.4 RANGE -42.5 1.0 -236.4 第四組 改正前 RMS 26.6 6.9 201.0 第四組 改正前 RMS 27.5 7.5 198.5 8.9 6.2 -91.9 -19.6 8.3 -159.8 RANGE -18.3 -16.0 -240.1 RANGE -35.1 -0.8 -234.9 第四組 改正後 RMS 8.7 7.7 185.4 第四組 改正後 RMS 26.5 6.4 198.4 說明: 單點固定模式:N 值由 26.6mm 降至 8.7mm,改善率 67.3%,但 E 值由 6.9mm 增加為 7.7mm,改善率-11.6%,就改正量而言,雖然 E 值增加了 0.8mm,但 E 值較差之 RMS 本來就不大,因此改正效果不明顯,不算是改正失敗,H 值 RMS 由 201.0mm 降至 185.4mm,改善率 7.8%,由於第四組原本與 GPS 之成果 較差即較大,因此效果較明顯。 無固定點模式:N 值由 27.5mm 降至 26.5mm,改善率 3.6%,E 值由 7.5mm 降 至 6.4mm,改善率 14.7%,H 值 RMS 由 198.5mm 降至 198.4mm,改善率 0.1% ,效果不明顯。5.第五組改正成果 表 5-10 3D 模式第五組改正成果(單位:mm)
3D 單點固定
3D 無固定點
施測 組別 精度 指標 N E H 施測 組別 精度 指標 N E H 33.8 10.1 -75.4 33.8 10.1 -75.4 RANGE -24.0 -8.0 -214.5 RANGE -24.0 -8.0 -214.5 第五組 改正前 RMS 23.3 6.1 160.7 第五組 改正前 RMS 23.2 7.1 164.4 7.9 16.1 13.0 15.4 14.6 -82.8 RANGE -6.9 2.9 -278.9 RANGE -3.6 -6.3 -201.4 第五組 改正後 RMS 5.1 11.1 171.3 第五組 改正後 RMS 10.2 7.7 162.3 說明: 單點固定模式:類似第四組,其 N 值由 23.3mm 降至 5.1mm,改善率 78.1%, 但 E 值由 6.1mm 增加為 11.1mm,改善率-81.97%,就改善率而言,雖然 E 值 為-81.97%,但改正後 E 值較差之 RMS 仍在±15mm 內,不算是改正失敗,H 值 RMS 由 160.7mm 增加為 171.3mm,改善率-6.6%,同樣的第五組原本與 GPS 之成果較差即較大,因此效果較明顯。 無固定點模式:N 值由 23.2mm 降至 10.2mm,改善率 56.0%,E 值由 7.1mm 增 加為 7.7mm,改善率-8.5%,H 值 RMS 由 164.4mm 降至 162.3mm,改善率 1.28%, 改正效果與單點固定相似。6.綜合討論: 綜合上述之成果我們可發現 3D 改正模式在單點固定之改正效果較無固定 點佳,單點固定模式中其平面與高程均有成效,只是高程改正後仍未合乎 要求,且不是很穩定;而無固定點方式中,高程無改正效果,平面精度除 第四組以外均有成效且合乎要求,但與單點固定模式相比,其效果較差。 探究第四組未何較差大卻無效果,其原因應該是我們的改正方式基本上是 以三維雷射所測量得之基線來約制 VRS 坐標,若 VRS 其點位間相對距離與 三維雷射之基線很相近則會有此情況,而經過比對 VRS 與 3D LASER 之基線 確實只有第四組較相近。 5-7 平面與高程分別改正成果分析 本節將平面與高程分開改正,即將三維坐標之 N、E 與 H 分開,首先討論 平面之改正方式與成果。 5-7.1 平面坐標改正模式 同 3D 模式分為無固定點與有單一固定點,但其中無固定點再分成三後視 點與十後視點,目的是為了分析增加後視是否能提升精度,而單一固定點 因為有一點已固定,所以只以十後視代入改正,資分述如下: 5-7.2 平面單點固定改正成果 同 3D 作法我們也以第 10 點為固定點,將其所測得之 GPS 坐標視為已知 值代入。我們將無固定點之成果與其並列以比較兩者之優劣,其改正成果 如下所示,資分組討論如下:
1.第一組改正成果 表 5-11 第一組 2D 單點固定與無固定點改正成果(單位:mm) 2D 單點固定 2D 無固定點(十後視) 施測 組別 精度 指標 N E 施測 組別 精度 指標 N E 16.4 10.6 16.4 10.6 RANGE 2.5 -7.0 RANGE 2.5 -7.0 第一組 改正前 RMS 12.5 5.6 第一組 改正前 RMS 12.3 5.6 11.6 3.3 18.9 4.2 RANGE -3.9 -6.0 RANGE 1.2 -7.6 第一組 改正後 RMS 6.8 2.8 第一組 改正後 RMS 12.3 3.0 說明: 單點固定模式:N 值 RMS 由 12.5mm 降至 6.8mm,改善率 45.9%,E 值由 5.6mm 降至 2.8mm,改善率 50.5%; 無固定點模式:N 值 RMS 未改變,E 值 由 5.6mm 降至 3.0mm,改善率 45.4%。 就改正量與改善率而言,單點固定改正成功,而無固定點之成果算是不明 顯,但還是在容許值內。
2.第二組改正成果 表 5-12 第二組 2D 單點固定與無固定點改正成果(單位:mm) 2D 單點固定 2D 無固定點(十後視) 施測 組別 精度 指標 N E 施測 組別 精度 指標 N E 12.8 5.7 12.8 10.1 RANGE -13.0 -19.7 RANGE -13.0 -19.7 第二組 改正前 RMS 8.2 9.8 第二組 改正前 RMS 8.0 9.8 10.5 3.8 6.6 2.3 RANGE -4.9 -5.2 RANGE -6.4 -11.8 第二組 改正後 RMS 5.9 3.1 第二組 改正後 RMS 4.6 6.6 說明: 單點固定模式:N 值 RMS 由 8.2mm 降至 5.9mm,改善率 28.1%,E 值由 9.8mm 降至 3.1mm,改善率 68.4%。 無固定點模式:N 值 RMS 由 8.0mm 降至 4.6mm,改善率 42.0%,E 值由 9.8mm 降至 6.6mm,改善率 33.2%。 就改正量與改善率而言二者均算成功。
3.第三組改正成果 表 5-13 第三組 2D 單點固定與無固定點改正成果(單位:mm) 2D 單點固定 2D 無固定點(十後視) 施測組 別 精度指 標 N E 施測組 別 精度指 標 N E 11.0 5.1 11.0 5.1 RANGE -14.1 -17.1 RANGE -14.1 -17.1 第三組 改正前 RMS 9.0 8.2 第三組 改正前 RMS 8.6 8.0 11.8 4.0 7.9 3.7 RANGE -12.4 15.5 RANGE -15.1 -13.3 第三組 改正後 RMS 7.5 7.2 第三組 改正後 RMS 6.6 5.6 說明: 單點固定模式:N 值 RMS 由 9.0mm 降至 7.5mm,改善率 16.7%,E 值由 8.2mm 降至 7.2mm,改善率 12.2%; 無固定點模式:N 值由 8.6mm 降至 6.6mm,改善率 23.2%,E 值由 8.0mm 降至 5.6mm,改善率 30.0%。 就改正量與改善率而言二者均算成功。
4.第四組改正成果 表 5-14 第四組 2D 單點固定與無固定點改正成果(單位:mm) 2D 單點固定 2D 無固定點(十後視) 施測 組別 精度 指標 N E 施測 組別 精度指 標 N E -8.2 14.3 -8.2 14.3 RANGE -42.5 1.0 RANGE -42.5 1.0 第四組 改正前 RMS 26.6 6.9 第四組 改正前 RMS 27.5 7.5 11.1 5.6 -19.5 8.4 RANGE -16.3 -17.5 RANGE -35 -0.8 第四組 改正後 RMS 8.4 8.6 第四組 改正後 RMS 26.5 6.4 說明: 單點固定模式:N 值 RMS 由 26.6mm 降至 8.4mm,改善率 68.4%,E 值由 6.9mm 增加為 8.6mm,改善率-24.6%,上述 E 值較差之 RMS 本來就 不大,因此改正效果不明顯,雖然其增加了 1.7mm,但不算 改正失敗; 無固定點模式:N 值由 27.5mm 降至 26.5mm,改善率 3.6%,E 值由 7.5mm 降 至 6.4mm,改善率 14.7%,改正效果不明顯。
5.第五組改正成果 表 5-15 第五組 2D 單點固定與無固定點改正成果(單位:mm) 2D 單點固定 2D 無固定點(十後視) 施測 組別 精度 指標 N E 施測 組別 精度 指標 N E 33.8 10.1 33.8 13.1 RANGE -24.0 -8.0 RANGE -24.0 -8.0 第五組 改正前 RMS 23.3 6.1 第五組 改正前 RMS 23.2 7.1 6.2 16.7 15.6 14.5 RANGE -5.5 4.6 RANGE -3.2 -6 第五組 改正後 RMS 4.3 12.0 第五組 改正後 RMS 10 7.8 說明: 單點固定模式:N 值 RMS 由 23.3mm 降至 4.3mm,改善率 81.6%,E 值由 6.1mm 增為 12.0mm,改善率-96.7%; 無固定點模式:N 值由 23.2mm 降至 10.0mm,改善率 57.0%,E 值由 7.1mm 增 為 7.8mm,改善率-9.86%。 6.綜合評論: (1).無固定點之改正模式穩定度仍不如單點固定。 (2).第四組改正成果與 3D 模式類似,應該也是其相對基線與 3D LSAER 相 近之故。
5-7.3 平面無固定點改正成果 平面坐標的無固定點方式分成三後視點與十後視點,在三後視點中只使 用 1,5,8 三個點作為後視點進行改正,另一作法則使用十個點作後視進行, 將二種作法之成果並列於表中分組討論如下: 1.第一組改正成果 表 5-16 第一組 2D 無固定點十後視與三後視改正前後成果 (單位:mm) 2D 無固定點(十後視) 2D 無固定點(三後視) 施測 組別 精度 指標 N E 施測 組別 精度 指標 N E 16.4 10.6 14.7 10.6 RANGE 2.5 -7.0 RANGE 2.8 -7.0 第一組 改正前 RMS 12.3 5.6 第一組 改正前 RMS 10.6 7.9 18.9 4.2 10.0 9.8 RANGE 1.2 -7.6 RANGE 8.8 -5.9 第一組 改正後 RMS 12.3 3.0 第一組 改正後 RMS 9.3 7.1 說明: 十後視部分:N 值沒改變,E 值由 5.6mm 降至 3.0mm,改善率 45.4%; 三後視部分:N 值由 10.6mm 降至 9.3mm,改善率 12.3%,E 值由 7.9mm 降至 7.1mm,改善率 10.1%。 就改正量與改善率而言,不管十後視或三後視效果均不明顯,特別是 N 值 部分。
2.第二組改正成果 表 5-17 第二組 2D 無固定點十後視與三後視改正前後成果 (單位:mm) 2D 無固定點(十後視) 2D 無固定點(三後視) 施測 組別 精度 指標 N E 施測 組別 精度 指標 N E 12.8 10.1 9.8 10.1 RANGE -13.0 -19.7 RANGE -5.5 -13.4 第二組 改正前 RMS 8.0 9.8 第二組 改正前 RMS 8.2 10.3 6.6 2.3 9.6 -1.5 RANGE -6.4 -11.8 RANGE -0.6 -4.8 第二組 改正後 RMS 4.6 6.6 第二組 改正後 RMS 6.0 3.4 說明: 十後視部分:N 值由 8.0mm 降至 4.6mm,改善率 42.0%,E 值由 9.8mm 降至 6.6mm,改善率 33.2%; 三後視部分:N 值由 8.2mm 降至 6.0mm,改善率 26.8%,E 值由 10.3mm 降至 3.4mm,改善率 67.0%。 就改正量與改善率而言,不管十後視或三後視效果均算成功。
3. 第三組改正成果 表 5-18 第三組 2D 無固定點十後視與三後視改正前後成果(單位:mm) 2D 無固定點(十後視) 2D 無固定點(三後視) 施測 組別 精度 指標 N E 施測 組別 精度 指標 N E 11.0 5.1 1.8 -5.4 RANGE -14.1 -17.1 RANGE -3.5 -9.0 第三組 改正前 RMS 8.6 8.0 第三組 改正前 RMS 2.6 7.0 7.9 3.7 -1.7 -2.9 RANGE -15.1 -13.3 RANGE -4.1 -10.4 第三組 改正後 RMS 6.6 5.6 第三組 改正後 RMS 2.8 7.4 說明: 十後視部分:N 值由 8.6mm 降至 6.6mm,改善率 23.3%,E 值由 8.0mm 降至 5.6mm,改善率 30.0%; 三後視部分:N 值由 2.6mm 增為 2.8mm,改善率-7.7%,E 值由 7.0mm 增為 7.4mm,改善率-5.7%。 改正效果不明顯,因其本來較差即不大,特別是三後視模式。
4.第四組改正成果 表 5-19 第四組 2D 無固定點十後視與三後視改正前後成果(單位:mm) 2D 無固定點(十後視) 2D 無固定點(三後視) 施測 組別 精度 指標 N E 施測 組別 精度 指標 N E -8.2 14.3 -22.2 12.9 RANGE -42.5 1.0 RANGE -34.5 1.0 第四組 改正前 RMS 27.5 7.5 第四組 改正前 RMS 27.5 8.6 -19.5 8.4 -23.9 11.4 RANGE -35 -0.8 RANGE -29.6 3.1 第四組 改正後 RMS 26.5 6.4 第四組 改正後 RMS 27.1 8.0 說明: 十後視部分:N 值由 27.5mm 降至 26.5mm,改善率 3.6%,E 值由 7.5mm 降至 6.4mm,改善率 14.7%; 三後視部分:N 值由 27.5mm 降至 27.1mm,改善率 1.5%,E 值由 8.6mm 降至 8.0mm,改善率 7.0%。 就改正量與改善率而言,不管十後視或三後視效果均不明顯。
5.第五組改正成果 表 5-20 第五組 2D 無固定點十後視與三後視改正前後成果 (單位:mm) 2D 無固定點(十後視) 2D 無固定點(三後視) 施測 組別 精度 指標 N E 施測組 別 精度 指標 N E 33.8 13.1 33.8 13.1 RANGE -24.0 -8.0 RANGE -22.5 -8.0 第五組 改正前 RMS 23.2 7.1 第五組 改正前 RMS 23.7 10.2 15.6 14.5 8.8 8.5 RANGE -3.2 -6 RANGE 2.9 0.5 第五組 改正後 RMS 10 7.8 第五組 改正後 RMS 6.2 5.6 說明:十後視部分:N 值由 23.2mm 降至 10.0mm,改善率 57.0%,E 值由 7.1mm 增加為 7.8mm,改善率-9.9%; 三後視部分:N 值由 23.7mm 降至 6.2mm,改善率 73.8%,E 值由 10.2mm 增為 5.6mm,改善率 45.1%; 就改正量與改善率而言,第五組原本與 GPS 之成果較差即較大,因此效 果是五組中最明顯, 雖然在十後視部分 E 值由 7.1mm 增加為 7.8mm,但 E 值 較差之 RMS 本來就不大,因此改正效果不明顯,僅增加了 0.7mm 不算是改 正失敗。 6.綜合評論: (1).在無固定點的方式中我們可發現 3 個後視之改正失敗者較 10 個後視