報告人
: 陳詹閔
指導教授
: 趙鍵哲
LiDAR 點雲資料進行邊緣線偵測處理
之門檻值研究
報告流程
前言
方法介紹
實驗與成果分析
未來工作
參考文獻
前言
光達
(LiDAR, Light Detecting And Ranging) 提供了地
表密集且豐富的三維資訊,
將
LiDAR 點雲資料製作成影像函數圖 (range image) ,
應用特徵萃取原理找出建物邊緣線,再經由輪廓線範圍內
的高程資訊萃取建立三維建物模型。
回顧線特徵萃取相關文獻
[
劉彥秀 ,2003] 一階導數 (Sobel 、 Canny) 以及二階導數 (LoG) 方法
[ 陳健文 ,2002] 多型態法,統計之原理
方法介紹
資料處理流程介紹與相對應的物空間邊緣線梯度情形
高斯平滑函數抑制雜訊造成梯度影響
高斯濾波器 (Gaussian filter) 之介紹:
資料處理流程介紹
圖 1. 邊緣線偵測資料處理流程圖 真實物空間資訊 LiDAR 蒐集 XYZ 邊緣線偵測元 一階或二階導數原理 Gaussian filter 內插 離散點雲資料 平滑化之 DSM 規則格網 DSM 邊緣線 用門檻值過濾可忽略的偵測值資料處理流程介紹與相對應的物空間邊緣線梯度情形
高斯平滑函數抑制雜訊造成梯度影響
Gaussian function
形狀接近鐘形 濾波器矩陣內各元素可視為權值 權值總合理論上應為 1 圖 5 σ =3 的 Gaussian 濾波器模型圖 ) 2 1 2 ( 2 1 ) , ( : 2 ) 1 1 2 ( 2 1 ) ( : 1 2 2 2 2 2 2 ) ( 2 2 y x x e y x G D e x G D高斯平滑函數抑制雜訊造成梯度影響
平滑因子
σ 值
訊號精度加以給定 決定 gaussian filter 罩窗內權值大小 當 σ 值越小情況下權值分布即向中央集中,濾波器形狀越高 且瘦其平滑效果不彰 σ 值越大時,權值分布雖然一樣呈現鐘形,但是罩窗中央與 四周的權值相對差值較不明線,換句話說該中心像元原本的 訊號值之權重已經不是相對的大於兩旁像元訊號值的權,於 是 濾波器形狀會變平緩且範圍較大,如此平滑效果較佳。高斯平滑函數抑制雜訊造成梯度影響
滑濾波器罩窗大小
決定要取鄰近中心像元多少個像元訊號值,擬合高斯模型進 行平滑折積運算 受到平滑因子 σ 的影響,若罩窗範圍開很大,罩窗邊緣的權 值會非常接近零 。 決定罩窗大小時可以視 σ 值大小給予一定比例給定,目前常 用的比例式為左右各取 (3×σ) 個像元filter size=[ (3×σ) 取整數 ]×2+1
高斯平滑影響梯度值 :
折積後的新梯度為原始梯度值 ×[ 由中心延伸某一方向的權值 Gd (x ,y)] 已知高斯濾波器內矩陣元素皆向中心對稱,故沿一方向的權值 加總值只有直角方向 Gd 直與斜角方向 Gd 斜的差異 理想情況下邊緣線只有中心像元的 梯度值與邊緣線方向的像元梯度值 不為零 1) -2 -(2 ,0)] G(a + ,0) 1 -G(a + ,0) 2[G(1 + ,0) G(0 ,0) G(a + ,0) 1 -G(a + ,0) G(1 ,0) G(0 ,0) G(-1 + ,0) 1 + G(-a + ,0) G(-a
Gd直 圖 6 理想邊緣線梯度與 Gaussian filter 折積示意圖 2) -2 -(2 a)] , G(a + ) 1 -a , 1 -G(a + ,1) 2[G(1 + ,0) G(0 a) , G(a + 1) -a , 1 -G(a + ,1) G(1 ,0) G(0 ,-1) G(-1 + 1) + ,-a 1 + G(-a + ,0) G(-a
Gd斜實驗與成果分析
實驗 1.
不同內插方法所得
DSM 與真值之比
較
實驗
2.
觀察實驗場資料
( 未加入隨機性 ) 因
平滑造成的梯度值以驗證理論值
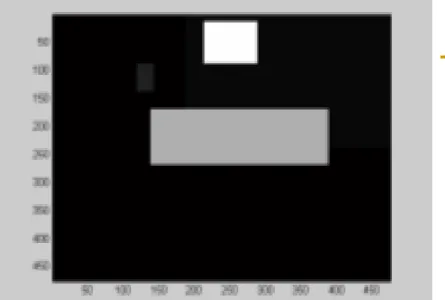
實驗場設計
建立一 0.2m 與 1m 網格的實驗場 背景 1( 高程 20m) 背景 2( 高程 21m) 建物 a( 面積: 5×3m2 ,高度 3m) 建物 b( 面積: 10×15m2 ,高度 21m) 建物 c( 面積: 20×50m2 ,高度 15m) 圖 7. 實驗區灰階圖 圖 8 實驗區彩色圖實驗 1. 不同內插方法所得 DSM 與真值之比較
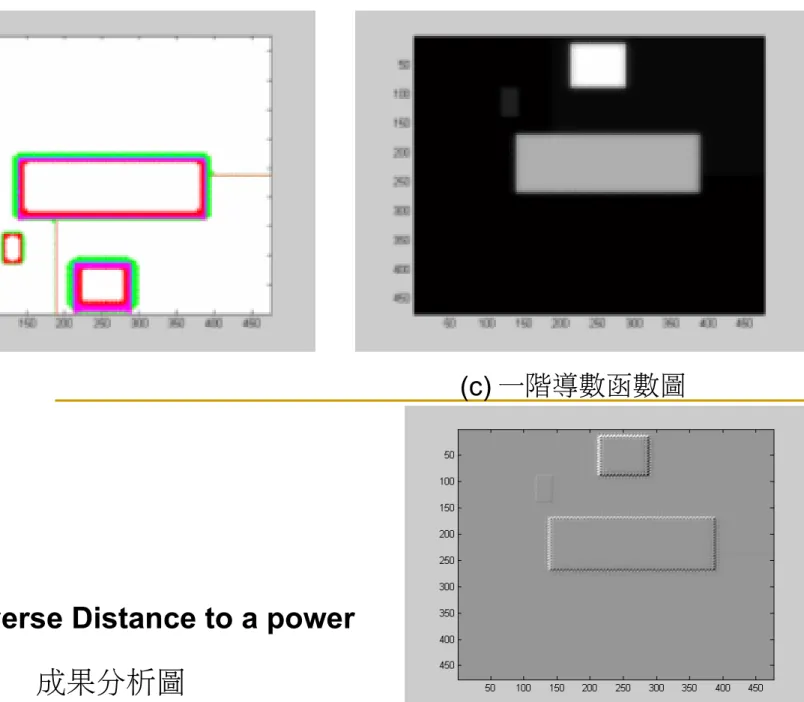
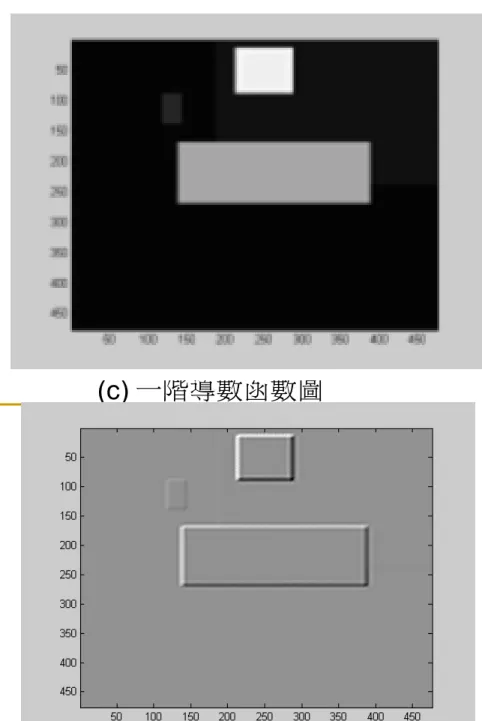
表一可發現除了最小鄰近法外,其餘三種內插方法在 1m 網格資料內插成 0. 2m 網格時就與真值不同 ,於是將 DSM 減去真值所得誤差向量圖表示出來 ,其中若誤差像量的絕對值小於 0.5 倍 RMS 即不予顯示,誤差像量絕對值 大於 3 倍 RMS 時用另外的顏色表示。向量負值: -0.5×RMS<v<0 紅色 v <-3×RM S 洋紅色 向量正值: 0<v<-0.5×RMS 綠色圖 9. Nearest neighbor 成果分析圖
圖 10. Inverse Distance to a power
圖 11. Kriging 成果分析圖
圖 12. Minimum Curvature
成果分析圖