國立交通大學
機械工程學系
碩士論文
微肌肉振動對手指牽張反射之影響
Effects of Muscle Vibration on Stretch Reflex of Fingers
研 究 生:王冠智
指導教授:楊秉祥 博士
微肌肉振動對手指牽張反射之影響
Effects of Muscle Vibration on Stretch Reflex of Fingers
研 究 生:王冠智 Student:Guan-Jhih Wang 指導教授:楊秉祥 博士 Advisor:Bing-Shiang Yang, Ph.D. 國 立 交 通 大 學 機 械 工 程 系 碩 士 論 文 A Thesis
Submitted to Department of Mechanical Engineering
College of Engineering
National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of
Master
in
Mechanical Engineering
Feb 2009
Hsinchu, Taiwan, Republic of China
微肌肉振動對手指牽張反射之影響 學生:王冠智 指導教授:楊秉祥 博士 國立交通大學機械工程學系碩士班 摘要 對正常人手指肌肉施予微振動刺激能提高被振動手指肌肉之運動誘發 電位。振動對於運動誘發電位的影響可分為大腦皮質與脊髓兩階段。雖然 微肌肉振動對大腦皮質可激度對於運動誘的影響已被多個研究證實,但脊 髓神經通路在此由振動造成的可激度的變化仍待確認的貢獻。本研究之目 的為利用牽張反射這種基本上為脊髓的神經生理反應來釐清振動對於脊髓 可激度的影響。十名男性健康受測者(年齡平均為 24.1±1.5 歲,身高平均為 178.1±5.4 公分,體重平均為 76.3±14.3 公斤)參與本研究。實驗以自製之手 指牽動裝置分別牽動受測者手部之第一背側骨間肌(first dorsal
interosseus),外展拇短肌(abductor pollicis brevis)與外展小指肌(abductor digiti minimi),藉由肌電訊號的量測量化上述肌肉分別在受到振動(80Hz; 0.3~0.7mm 振幅)與沒有振動時牽張反射的潛伏期與峰值大小。結果顯示有 振動比無振動之牽張反射短潛期峰值降低了 17.8%,而潛伏期沒有顯著改 變。然而在長潛期反射之峰值與潛伏期均無明顯差異。因此基於振動抑制 短潛期反射發現,脊髓神經通路在微肌肉振動引發中樞神經可激度增加之 現象上應不具正向的效果,其影響可能為負向效果或是沒有影響。
Effects of Muscle Vibration on Stretch Reflex of Fingers
Student: Guan-Jhih Wang Advisor: Bing-Shiang Yang, Ph.D. Department of Mechanical Engineering
National Chiao Tung University Abstract
Previous studies have shown that muscle vibration, below the threshold of inducing illusory movement or tonic vibration reflex, could modulate
motor-evoked potential (MEP) of pathways controlling hand muscles in intact and chronic stroke individuals. It is evident that this type of sub-threshold
muscle vibration provides corticomotor modulations on the pathways controlling the vibrated and adjacent non-vibrated muscles. However, spinal-level
contribution to the muscle vibration-induced changes in MEPs is not clear. The purpose of this study was to investigate the effects of muscle vibration on the excitability of the spinal neural pathway. Ten healthy male subjects (age, 24.1±1.5 years; body height, 178.1±5.4 cm; body weight, 76.3±14.3 kg) volunteered for this study. Muscle vibration (MV) was applied to the muscle belly of first dorsal interosseus (FDI), abductor pollicis brevis (APB) and
abductor digiti minimi (ADM) by an electrodynamic shaker with a custom-made 7mm-diameter probe. Muscle activities were recorded using surface
electromyography (EMG). The vibration frequency was set at 80Hz, and the amplitude was adjusted to be just below the threshold of inducing tonic vibration reflex or illusory movement. A custom-made finger stretching device driven by a servo motor was used to stretch the hand muscles to induce a rapid
adduction/abduction. Custom-designed software written in LabVIEW was used to control the device. The onset of stretching finger was randomized from 1s to 3s after onset of vibration. The duration of vibration was extended to offset of stretching finger after 1s. Subjects were instructed to perform an isometric contraction in the target muscle at 20% MVC before stretching the finger and maintain the activity level until the trial ended. Our results indicate that the amplitude of M1 of the three finger muscles was depressed 17.8% during muscle vibration as compared to that with no vibration; however, there was no significant difference in the amplitude of M2 between with and without muscle vibration. In addition, muscle vibration did not affect the latency of either M1 or M2. These findings suggest that muscle vibration-induced MEP facilitation may not occur in the spinal-level pathway.
誌謝 在經過兩年半的辛苦奮鬥,終於完成了研究所的學業。回想起當初開始 準備研究所考試的時候到現在,很慶幸自己能夠成功度過這漫長與艱辛的 過程。當初在要進實驗室前,因為是老師的第一屆學生,已經知道接下來 的研究所學業將會非常辛苦,沒有實驗設備,沒有學長傳承,與機械本科 完全不相關的研究領域等許多困難的考驗。也由於這個論文題目所牽涉到 的研究領域相當廣泛,包含機構設計、馬達控制、人體實驗、訊號擷取、 訊號分析、統計分析、設備控制程式撰寫、訊號分析程式撰寫與神經生理 學,因此在完成這篇研究的過程學習到相當多的東西。 感謝楊秉祥老師在這段時間的指導與勉勵,讓本論文更臻完美,也讓我 學習到許多做研究的態度與方法。也感謝同窗的夥伴國庭在這兩年的陪伴 與幫忙,以及實驗室學弟妹貽婷、學箴、馨云、致中、柏伽、顯庭、松緯、 祥晴與廷昇在學業與生活上的幫忙,還有那些曾經幫忙我做實驗的同學與 朋友,以及我最好的朋友李建億與梁峻碩。 最後,將本論文僅獻於我敬愛的父親王國禎先生、母親蔡玉愛女士、大 哥祥瑋、二哥君展以及女友郭容瑄,感謝他們在我研究所的期間一路上能 夠自始自終的支持我,並幫助我度過最困難的時刻。希望將這份成果和喜 悅與那些關心我以及協助我的人一起分享。
目錄 摘要 ... i Abstract ... ii 誌謝 ...iii 目錄 ... iv 圖目錄 ...vii 表目錄 ... xv 一、緒論 ... 1 1.1 研究背景 ... 1 1.2 文獻回顧 ... 3 1.3 研究目的 ... 7 二、研究原理 ... 8 2.1 牽張反射原理 ... 8 2.2 肌電訊號原理 ... 11 三、研究方法 ... 14 3.1 實驗系統設計 ... 14 3.1.1 實驗系統架構 ... 14 3.1.2 實驗控制程式系統 ... 18 3.1.3 振動裝置系統 ... 23 3.1.4 手指旋轉裝置系統 ... 29
3.1.5 肌電訊號量測系統 ... 36 3.1.6 手臂支撐系統 ... 40 3.1.7 接地系統 ... 41 3.2 實驗步驟 ... 43 3.2.1 實驗設計說明 ... 43 3.2.2 受測者 ... 44 3.2.3 慣用手檢測 ... 44 3.2.4 EMG 準備 ... 45 3.2.5 受測者姿勢準備 ... 45
3.2.6 最大自主收縮實驗(Maximum Voluntary Contraction)... 46
3.2.7 張力性振動反射實驗(Tonic Vibration Reflex) ... 46
3.2.8 牽張反射實驗(Stretch Reflex) ... 47 3.3 資料分析 ... 51 3.4 統計分析 ... 53 四、結果 ... 55 4.1 組內分析 ... 57 4.1.1 最大自主收縮結果 ... 57 4.1.2 張力性振動反射結果 ... 58 4.1.3 短潛期分析 ... 59
4.1.4 長潛期分析 ... 63 4.2 組間分析 ... 67 4.2.1 短潛期分析 ... 67 4.2.2 長潛期分析 ... 71 五、討論 ... 76 5.1 振動對短潛期反射之影響 ... 76 5.2 振動對長潛期反射之影響 ... 80 5.3 研究限制 ... 82 5.4 小結 ... 83 六、結論 ... 84 八、未來研究方向與建議... 85 參考文獻 ... 86 附錄一 手指被動旋轉機構設計圖... 93 附錄二 慣用手檢測表格... 95
圖目錄 圖 1 肌肉振動影響中樞神經之時序... 6 圖 2 反射神經傳導路徑... 9 圖 3 牽張反射神經傳導路徑... 10 圖 4 牽張反射之肌電訊號樣本[54]... 11 圖 5 肌纖維膜電位變化流程... 12 圖 6 肌電訊號圖形... 13 圖 7 手部支撐裝置自由度... 15 圖 8 實驗系統架構. 系統功能主要分為三個部份,並由電腦來控制,其中 電腦由實驗控制程式控制。ㄧ為透過馬達控制器控制手指旋轉裝置作 動,二為透過類比輸出之資料擷取裝置控制振動器作動,三為透過類 比輸入功能之資料擷取裝置擷取各系統傳回之資料。FDI 為第一背側 骨間肌,APB 為外展拇短肌,ADM 為外展小指肌,AO 為類比輸出 功能之資料擷取裝置,AI 為類比輸入功能之資料擷取裝置,DAQ 為 資料擷取裝置。 ... 17 圖 9 受測者資料設定頁面... 19 圖 10 參數紀錄檔內容... 20 圖 11 參數與資料紀錄形式. 參數紀錄檔名紀錄形式為 1、2、3、…等等, 其中 1 為第一個 Trial,2 為第二個 Trial,以此類推,檔案類型為 txt
文字檔。資料紀錄檔名紀錄形式為 1_年-月-日_時間_Trial。例如: 1_08-08-15_1731_001,其中 08-11-03 分別為日期之年月日,代表記 錄日期為 2008 年 8 月 15 日,1731 表示記錄時間為下午五點三十一 分,001 為第一個 Trial,如為 002 則為第二個 Trial,以此類推。 . 20 圖 12 資料紀錄檔內容... 21 圖 13 手指旋轉裝置位置調整頁面... 21 圖 14 訊號監控頁面... 22 圖 15 開啟振動裝置控制時序. 實驗一開始先啟動資料擷取裝置(DAQ)紀 錄資料,並持續至振動器關閉 0.5 秒後(或手指轉動完畢 1.5 秒後), 經過 0.5 秒後,如有振動則開啟振動器,且持續至手指轉動完畢 1 秒後,如不施加振動則不開啟振動器,然後同時等待一隨機 1 至 3 秒的時間,在啟動馬達開始轉動手指產生牽張反射現象,在振動器 關閉後即為 1 個 Trial,下一個 Trial 在振動器關閉 7 秒後開始。 . 23 圖 16 振動系統架構. 振動系統功用為控制振動器給予受測者手部肌肉振 動刺激。振動系統由電腦控制給予 NI-9263 一 Sine 波形,其中電腦 由實驗控制程式控制,而 NI-9263 則輸出 Sine 訊號給予功率放大器, 功率放大器將訊號放大後驅動振動器給予受測者振動刺激,而力規 則透過 NI-9239 持續傳回振動器與手部肌肉之接觸力至電腦。DAQ 為資料擷取裝置,NI-9263 為類比輸出之資料擷取裝置,NI-9239 為
類比輸入之資料擷取裝置。 ... 24
圖 17 振動裝置系統... 24
圖 18 振動器加速度曲線. 左圖為無負載之振動器加速度曲線,右圖為有負 載之振動器加速度曲線。 ... 25
圖 19 DAQ 的類比輸出模組. 左圖為 NI-9172 介面,右圖為 NI-9263 介面。 ... 26 圖 20 DAQ 組合模組 ... 26 圖 21 NI9263 接線 ... 26 圖 22 功率放大器... 27 圖 23 功率放大器正面面板... 27 圖 24 力規 28 圖 25 力規放大器... 29 圖 26 電源供應器... 29 圖 27 手指旋轉裝置系統... 30 圖 28 控制器與驅動器接線... 31 圖 29 控制訊號定義... 32 圖 30 驅動器正面面板... 33 圖 31 編碼器訊號格式... 35 圖 32 手指旋轉裝置水平架設... 35 圖 33 手指旋轉裝置垂直架設... 36
圖 34 肌電訊號量測系統... 37 圖 35 肌電訊號量測設備... 39 圖 36 轉接器(Patient Unit)... 39 圖 37 前置放大器... 40 圖 38 尺骨莖突... 40 圖 39 手臂支撐系統... 41 圖 40 接地系統... 42 圖 41 DAQ 接地 ... 42 圖 42 EMG 量測設備接地... 42 圖 43 振動器接地... 43 圖 44 伺服馬達接地... 43
圖 45 受測者 EMG 貼片準備. 左圖為 FDI 位置貼片,右圖為 APB 與 ADM 位置貼片。... 45 圖 46 受測者姿勢... 45 圖 47 加速規設置... 47 圖 48 受測者即時監測肌肉的活動程度... 49 圖 49 每秒 850 度之扭力曲線... 49 圖 50 每秒 850 度之速度曲線... 49 圖 51 FDI 之牽張反射實驗. 左圖為有振動,右圖為無振動。... 49
圖 52 APB 之牽張反射實驗. 左圖為有振動,右圖為無振動。... 50 圖 53 ADM 之牽張反射實驗. 左圖為有振動,右圖為無振動。 ... 50 圖 54 裝置控制時序. 左圖為開啟振動器之裝置控制時序,右圖為關閉振動 器裝置控制時序。... 50 圖 55 手指加速度曲線... 53 圖 56 牽張反射訊號分析. 峰值取短潛期反射之最大值,潛伏期取短潛期反 射之起始時間,以手指最大加速度時間為基準,三倍標準差為門檻。 長潛期反射之範圍取短潛期反射後之 20 到 60ms 之間。... 53 圖 57 每秒 850 度之扭力曲線... 56 圖 58 每秒 850 度之速度曲線... 56 圖 59 牽張反射肌電訊號(EMG)分析. 振幅取短潛期反射之最大值,潛伏期 取短潛期反射之起始時間,以手指最大加速度時間為基準,三倍標 準差為門檻。長潛期反射之範圍取短潛期反射後之 20 到 60ms 之間。 ... 56 圖 60 振動器與肌肉接觸壓力曲線. 振動器啟動時(1~3s)之接觸壓力並非一 常數,而是一 Sine 波形式,壓力維持在-2~1N 之間,而在振動器未 啟動時(3~5s),接觸壓力維持約-0.4N。... 57 圖 61 張力性振動反射樣本. 此圖為受測者 GJ003 之 APB 張力性振動反射 訊號樣本,振動振幅為 0.4mm。 ... 58 圖 62 組內之短潛期反射振幅比較結果. 圖中為 10 名受測者之反射峰值平
均值之變化,反射峰值定義為 Amp,有振動與無振動之峰值平均值 相除為 AmpMV/Ampno MV,p 值為 t 檢定之結果。縱軸為受測者數量, 橫軸為肌肉。在 10 名受測者中,FDI 有 8 名降低,APB 有 6 名降低, ADM 有 8 名降低,其他均為增加。結果顯示振動會造成反射峰值顯 著之降低。Unpaired t-test。... 60 圖 63 組內之短潛期反射潛伏期比較結果. 圖中為 10 名受測者之反射潛伏 期平均值之變化,反射潛伏期定義為 Ltn,有振動與無振動之潛伏期 平均值相除(LtnMV/Ltnno MV),p 值為 t 檢定之結果。縱軸為受測者數 量,橫軸為肌肉。在 10 名受測者中,FDI 有 6 名增加,APB 有 8 名 增加,ADM 有 3 名增加,其他均為降低。結果顯示振動不會使反射 潛伏期有顯著之改變。Unpaired t-test。... 62 圖 64 組內之長潛期反射振幅比較結果. 圖中為 10 名受測者之反射峰值平 均值之變化,反射峰值定義為 Amp,有振動與無振動之峰值平均值 相除為 AmpMV/Ampno MV,p 值為 t 檢定之結果。縱軸為受測者數量, 橫軸為肌肉。在 10 名受測者中,FDI 有 5 名降低,APB 有 7 名降低, ADM 有 6 名降低,其他均為增加。結果顯示振動不會使長潛期反射 峰值有顯著之改變。Unpaired t-test。... 64 圖 65 組內之長潛期反射潛伏期比較結果. 圖中為 10 名受測者之反射潛伏 期平均值之變化,反射潛伏期定義為 Ltn,有振動與無振動之潛伏期
平均值相除(LtnMV/Ltnno MV),p 值為 t 檢定之結果。縱軸為受測者數 量,橫軸為肌肉。在 10 名受測者中,FDI 有 5 名增加,APB 有 5 名 增加,ADM 有 5 名增加,其他均為降低。結果顯示振動不會使長潛 期反射潛伏期有顯著改變。Unpaired t-test。... 66 圖 66 十位受測者平均之各肌肉之短潛期反射振幅比較結果. 縱軸為對 MVC 標準化之反射峰值,橫軸為肌肉。10 名受測者在 FDI、APB 與 ADM,振動均會造成反射峰值降低,其中 ADM 有顯著之差異 (p<0.05)。Paired t-test:*: p<0.05。 ... 69 圖 67 十位受測者平均之各肌肉之短潛期反射潛伏期比較結果. 縱軸為反 射潛伏期,橫軸為肌肉。10 名受測者在 FDI 與 APB,振動造成反射 峰值增加,其中 APB 有顯著之差異(p<0.05)。在 ADM,振動造成反 射峰值降低,但無顯著之差異(p=0.118)。Paired t-test:*: p<0.05。 ... 70 圖 68 十位受測者平均之整體之短潛期反射振幅比較結果. 縱軸為對 MVC 標準化之反射峰值,橫軸為肌肉。10 名受測者在不分肌肉類別之下, 振動會造成反射峰值降低(69.6 ±52.6%MVC vs. 57.2±42.0 %MVC), 且有顯著之差異(p<0.05)。Paired t-test:*: p<0.05。... 71 圖 69 十位受測者平均之整體之短潛期反射潛伏期比較結果. 縱軸為反射 潛伏期,橫軸為肌肉。10 名受測者在不分肌肉類別之下,振動不會 造成反射潛伏期有顯著之改變(29.0±2.5 ms vs. 29.4±2.0 ms)
(p=0.157)。... 71 圖 70 十位受測者平均之各肌肉之長潛期反射振幅比較結果. 縱軸為對 MVC 標準化之反射峰值,橫軸為肌肉。10 名受測者在 FDI、APB 與 ADM,振動與無振動之反射峰值均無顯著之差異(p>0.105)。Paired t-test。... 73 圖 71 十位受測者平均之各肌肉之長潛期反射潛伏期比較結果. 縱軸為反 射潛伏期,橫軸為肌肉。10 名受測者在 FDI 與 ADM,振動與無振 動之反射潛伏期無顯著之差異(p=0.299) ,在 APB 則有顯著之差異 (p<0.05)。Paired t-test:*: p<0.05。 ... 74 圖 72 十位受測者平均之整體之長潛期反射振幅比較結果. 縱軸為對 MVC 標準化之反射峰值,橫軸為肌肉。10 名受測者在不分肌肉類別之下, 無振動與有振動之反射振幅無顯著差異(77.9±55.7 %MVC vs. 72.4±50.7 %MVC) (p=0.176)。Paired t-test。 ... 75 圖 73 十位受測者平均之整體之長潛期反射潛伏期比較結果. 縱軸為反射 潛伏期,橫軸為肌肉。10 名受測者在不分肌肉類別之下,無振動與 有振動之反射潛伏期無顯著差異(51.8±0.4 ms vs. 51.9±0.5 ms) (p=0.12)。... 75 圖 74 肌肉振動之神經通路影響... 83
表目錄 表 1 功率放大器規格表... 27 表 2 振動器規格表... 28 表 3 力規規格表... 29 表 4 控制器規格表... 31 表 5 伺服馬達規格表... 34 表 6 肌電訊號量測設備規格表... 39 表 7 最大自主收縮結果... 57 表 8 張力性振動反射結果. 臨界值為引起肌肉張力性振動反射或引起假想 動作之振幅,設定值為牽張反射實驗所給予振動刺激之振幅,單位 為 mm。 ... 59 表 9 組內各肌肉之短潛期反射振幅結果(平均值±標準差). 反射峰值對 MVC 標準化,單位為%MVC。No-Vib 為沒有振動,Vib 為有振動。 受測者編號從 GJ001~GJ011(除 GJ004)。... 61 表 10 組內各肌肉之短潛期反射潛伏期結果(平均值±標準差). 反射潛伏期 單位為 ms。No-Vib 為沒有振動,Vib 為有振動。 ... 63 表 11 組內各肌肉之長潛期反射振幅結果(平均值±標準差). 反射峰值對 MVC 標準化,單位為%MVC。No-Vib 為沒有振動,Vib 為有振動。 ... 65 表 12 組內各肌肉之長潛期反射潛伏期結果(平均值±標準差). 反射潛伏期
單位為 ms。No-Vib 為沒有振動,Vib 為有振動。 ... 67 表 13 十位受測者平均之各肌肉之短潛期反射振幅結果(平均值±標準差). 反射峰值對 MVC 標準化,單位為%MVC。No-Vib 為沒有振動,Vib 為有振動。受測者為所有 10 名受測者(n=10)。... 69 表 14 十位受測者平均之各肌肉之短潛期反射潛伏期結果(平均值±標準差). 反射潛伏期單位為 ms。No-Vib 為沒有振動,Vib 為有振動。受測者 為所有 10 名受測者(n=10)。 ... 69 表 15 十位受測者平均之各肌肉之長潛期反射振幅結果(平均值±標準差). 反射峰值對 MVC 標準化,單位為%MVC。No-Vib 為沒有振動,Vib 為有振動。受測者為所有 10 名受測者(n=10)。... 73 表 16 十位受測者平均之各肌肉之長潛期反射潛伏期結果(平均值±標準差). 反射潛伏期單位為 ms。No-Vib 為沒有振動,Vib 為有振動。受測者 為所有 10 名受測者(n=10)。 ... 73 表 17 肌肉振動引發運動誘發電位增加之相關研究結果. 檢測肌肉分別為 第一背側骨間肌(FDI)、外展拇短肌(APB)、外展小指肌(ADM)、橈 側屈腕肌(Flexor Carpi Radialis, FCR)與橈側伸腕長肌(Extensor Carpi Radialis Longus, ECRL)。Motor Threshold 為引起 MEP 之 TMS 最小 強度。1mV(MEP)為引起 1mV 大小 MEP 之 TMS 強度。 ... 77
一、緒論 1.1 研究背景
腦血管病變(Cerebrovascular Disease or Cerebrovascular Accident, CVD or CVA),俗稱中風。中風是由於腦部血管發生出血或梗塞的情況,因此造 成局部的腦部區域無法獲得氧氣供應,使得腦細胞死亡,而無法行使其控 制的功能。 對於中風病患來說,在各部位功能復健問題中,上肢功能的恢復是相 當困難的一部份。中風病患在病後的上肢功能部份,有85%的人都會有癱瘓 的現象,即使經過三到六個月的復健,卻仍有55到75%的病患存在上肢功能 性動作缺陷的問題[1]。長期研究更指出,中風病患之中只有不到一半的比 例能夠在上肢功能的恢復有良好的效果[2, 3]。 通常下肢功能比起上肢功能有較好的恢復,有 75%到 83%的中風病患 已經可以重新學會行走[1, 4, 5]。這樣的差別可能是因為四分之三的中風是 發生在中大腦動脈供應的區域,而造成大多數中風病患都有上肢功能的問 題。可能是因為上肢比起下肢的動作複雜許多,上肢的功能性動作包含抓 取(Grasp)物件、握住(Hold)物件與操作(Manipulate)物件,從肩膀到手指間 肌肉活動性整合與徵召更是較下肢為複雜。相對來說,癱瘓腳部可能只須 少量的功能恢復就能夠行走。而肩關節的半脫位、肩膀與手部併發症、軟
組織損傷與肩膀酸痛也是阻礙癱瘓手部復健治療的原因。另一個原因可能 是中風病患上肢在做功能動作時缺乏自主性的刺激,一般下肢在站立或行 走時同時需要患側與正常側的活動性,而上肢卻不自主的選擇使用正常側 (unaffected side)[1]。 综合相關文獻可知,上肢復健相對於其他部位的復健是較為困難的。 目前仍沒有一個很明確相對優越的復健治療方式對於上肢復健有較佳的療 效。雖然已經出現相當多相關的復健方式,但許多對於一些復健方式在治 療效果上的研究顯示療效並不是那麼明顯。在一些比較神經生理復健方法 效果的研究中,如本體感覺神經肌肉促進療法(Proprioceptve Neuromuscular Facilitabon, PNF)、神經發展療法(Neurodevelopmental Treatment, NDT)與 Brunnstrom 療法,其在整體功能性恢復與上肢功能恢復並沒有明顯的效果[1, 6-10]。因此復健治療方式之神經生理機制的進一步探討相當的重要。 振動刺激可分為會引起張力性振動反射的振動與不會引起張力性振動 反射的振動,前者是指在超過某一門檻值之振幅下會引起肌肉持續反射的 現象,後者則是在小於此一門檻值之振幅,而沒有引起此現象[11]。會引起 張力性振動反射的振動刺激常被用來作為肌肉訓練工具,而低於臨界值(不 會引起張力性振動反射)的振動刺激在近年來被嘗試作為醫療復健方式之 ㄧ,用以刺激癱瘓患者的肌肉動作控制[12-19]。中風病人手部活動功能的
障礙是影響其生活品質的主要因素之ㄧ,近期研究發現低於張力性振動反 射振幅之振動刺激可改變健康人與中風病人大腦中樞對手部肌肉的控制訊 號,並可能改善手指個別活動性[20]。然而,振動刺激改變手部肌肉控制訊 號機制之來源未完全被釐清,主要是此振動對中樞神經(大腦皮質與脊髓) 的影響發生區域仍有待區別。 1.2 文獻回顧
Lang & Schieber [21]在評估腦中風病患手指功能的研究指出,健康者與 半癱瘓中風病患正常側的手指活動獨立性比較好,而中風病患損傷側的手 指活動獨立性則比較差。病患的每個手指之大腦皮質(Corticomotor)控制區 域的損傷程度都有不同的差別,其中大拇指與食指之獨立運動性的損傷程 度是較輕微或幾近正常的,而中指、無名指與小拇指的損傷程度則較為嚴 重。在這裡的獨立運動性是指手指單獨做內屈與外伸(Flexion/Extension)方 向環繞運動而不使其他手指也運動的程度。 在臨床神經科學的診斷上,經常利用運動誘發電位(Motor Evoked Potential, MEP)來評估由大腦運動皮質經皮質脊髓路徑傳導到運動神經元 再到週邊肌肉的整個運動神經路徑之病變,如腦中風、脊髓病變、脊髓外 傷、多發性硬化症、運動神經元病變及週邊神經近端之病變[22]。運動誘發
TMS)或經顱電刺激(Transcranial Electrical Stimulation, TES),且激發肌肉動 作時,由肌電訊號(Electromyography, EMG)量測設備所量測到對應肌肉的 EMG 數值。運動誘發電位的大小與運動皮質、脊髓運動神經與周邊神經的 可激度(Excitability)有關[22]。在中風病患的應用上,運動誘發電位(MEP) 可用來預測中風病患運動功能的恢復情況,如果癱瘓部位仍具有運動誘發 電位(MEP),則病患運動功能恢復通常較佳[22-24]。因此,運動誘發電位 (MEP)的存在或增加代表更高的可激度,也進一步的代表中風病患具有更良 好的運動功能恢復之可能性。 振動刺激可造成肌肉做週期性收縮[25, 26],且可能是對主肌梭傳入神經 (Primary Spindle Afferents)最有力的刺激[27, 28]。振動刺激也被應用在改進 神經肌肉控制問題的病症上,它可抑制拮抗肌(Antagonists)以改善帕金森氏 症(Parkinson's Disease)、小腦病變(Cerebellar Disorders)或其他類似麻痺 (Spastic)患者之拮抗肌(Antagonists)同步收縮(Co-contractions)之問題,所應 用之振動刺激類型同時包含高於與低於張力性振動反射振幅[11],或是低於 引起假想動作(Illusory Movement)現象之振幅[26, 29],在本研究中所應用之 振動振幅將避免產生張力性振動反射或假想動作,主要用以改變肌肉對應 之運動神經單元(Motoneurons)可激度來促進運動神經活化(Motor Activity) 模式[29-32]。
在許多研究中發現給予肌肉低於張力性振動反射振幅之振動刺激(振動 頻率為80~120Hz;振幅為0.2~0.6mm)可以增加健康成年人之運動誘發電位 (MEP)[29, 33-37]。Rosenkranz and Rothwell [38]利用TMS來檢測低於張力性 振動反射振幅之振動感覺輸入(振動頻率為80Hz;振幅為0.2~0.5mm)對於大 腦皮質迴路抑制性的影響,該研究發現,給予振動刺激與無振動刺激的實 驗相比,振動感覺的輸入會造成運動誘發電位(MEP)提高、短期皮質抑制 (Short Interval Intracortical Inhibition, SICI) 減 少 與 長 期 皮 質 抑 制 (Long Interval Intracortical Inhibition, LICI)的增加,同時其他沒有給予振動的手指 肌肉之運動誘發電位(MEP)卻會降低。其結果與以往的研究相符合,即振動 刺激輸入確實可以對輸入部位於運動皮質(Motor Cortex)抑制神經元的可激 度產生不同程度的影響[29, 33-37]。除了振動肌肉可激度增加外,也發現了 振動刺激也會同時使無振動手指肌肉之可激度比原先的降低。另外,同樣 的微幅振動刺激(振動頻率為80Hz;振幅為0.5mm)橈側屈腕肌(Flexor Carpi Radialis, FCR)也會造成其拮抗肌(Antagonist Muscle)-橈側伸腕肌(Extensor Carpi Radialis, ECR)之運動誘發電位(MEP)的下降,也說明了不同肌肉運動 誘發電位(MEP)改變的可能[36, 37]。低於張力性振動反射振幅之振動刺激造 成 手 指 肌 肉 間 可 激 度 的 不 同 對 於 促 進 中 樞 運 動 神 經 病 患 之 前 臂 肌 肉 (Extensor Carpi Radialis Longus, ECRL)的控制可能將有所幫助[29]。
振動肌肉增加運動誘發電位(MEP)的機制可分為兩主要階段,前期是在 振動開始後的 9 到 14 毫秒間,是屬於脊髓影響的階段,而後期是在振動開 始 120 毫秒後,則是大腦皮質影響的階段[35],如圖 1。 圖 1 肌肉振動影響中樞神經之時序 一些研究認為振動肌肉造成運動誘發電位(MEP)增加是因脊髓可激度 的增加,這是因 Ia 傳入神經(afferent)之上行訊號與髓體神經下行(efferent) 訊號與在運動神經元所造成之積合效應(Summation)或去極化 (Depolarization),另外也可能是 Ia 傳入神經在運動皮質區之輸出元本身的影 響[33, 34]。而區別大腦皮質的影響與脊髓的影響對於改善不正常手部活動 將具有幫助[35, 39, 40]。然而在一些比較經顱磁刺激(TMS)與經顱電刺激 (TES)文獻中指出振動使運動誘發電位(MEP)增加有一部份可能是由於以往
多以 TMS 誘發 MEP,在利用 TES 量測時並沒有發現運動誘發電位(MEP)
的增加[35, 41],因 TES 主要刺激位於軸丘(Axon Hillock)之大腦皮質運動神
Vibration Onset Spinal Cortical 9ms 14m 120ms 5ms Early Late Phase MEP Modulation 1000ms TMS Onset MEP
經元(Corticomotoneurons),而 TMS 是以跨突觸地方式刺激大腦皮質細胞[42, 43],故以 TMS 量測振動之運動誘發電位(MEP)的增加只是針對大腦皮質源 而言[35],因此振動對脊髓神經通路的影響仍沒有被直接量化。综而言之, 振動刺激對於健康成年人在大腦皮質可激度會造成影響[29, 33-37, 44, 45],但對於脊髓神經可激度(Spinal Excitability)的影響則仍待釐清[29, 35, 38, 41, 46]。 1.3 研究目的 微肌肉振動可選擇性地改變健康人手部振動肌肉與其鄰近肌肉之可激 度,即振動肌肉之可激度將會提高,同時抑制鄰近肌肉之可激度[19, 20]。 近期研究也顯示微肌肉振動對於中風病患之手部肌肉也有類似的現象,這 些肌肉分別為第一背側骨間肌(First Dorsal Interosseus, FDI),外展拇短肌 (Abductor Pollicis Brevis, APB)與外展小指肌(Abductor Digiti Minimi,
ADM),此三條肌肉均屬於手掌內肌(Hand Intrinsic Muscles),而手部肌肉個 別活動能力之缺乏更是中風病患手部功能障礙的最主要原因,因此微肌肉 振動可能對於中風病患的手部獨立活動機能改善或有所幫助[20]。若能區分 出振動機制在脊髓或大腦皮質可激度的影響,就可進一步發展在神經生理 研究與復健上的應用。故本研究希望利用肌肉的牽張反射這種主要為純脊 髓神經路徑的行為來評估手部微肌肉振動對於脊髓神經可激度的影響,即 探討肌肉振動對於手指牽張反射之影響。
二、研究原理 本研究應用牽張反射(Stretch Reflex)來區分振動刺激在神經中樞之影 響,並利用肌電訊號(Electromyography, EMG)作為生理訊號之量測標準,即 以肌電訊號(EMG)量化牽張反射之大小。因此研究原理分為兩個部份來說 明,包含牽張反射與肌電訊號(EMG)。 2.1 牽張反射原理 牽張反射(Stretch Reflex)是一種為因應肌肉突然快速伸張的保護機 制。肌肉中的肌梭(Muscle Spindle)偵測肌肉長度的變化,高爾肌腱器(Golgi Tendon Organ)偵測肌肉的張力,兩者皆屬於本體感受器(Muscle Proprioceptor)。當肌肉受到用利快速伸張,肌梭為保護肌肉而產生反射性的 動作-牽張反射,高爾肌腱器偵測到肌肉張力極強時,就會放鬆肌肉。因 此被認為是外力干擾人體姿態時,為了調節肢體勁度與穩定性的必要反 應,而在牽張反射的機械特性上,反射的勁度與增益與肌肉受到的干擾形 態相關,當干擾之速度增加,則反射增益降低,而反射的增益、勁度與黏 滯特性也會隨著肌肉扭力增加而增加,肌肉伸張也比肌肉收縮時的反射增 益高[47, 48]。圖 2為反射神經傳導路徑,牽張反射屬於Spinal Reflex Pathway。
圖 2 反射神經傳導路徑
人體的中樞神經系統分為兩大部分,一為腦(Brain),另一為脊髓(Spinal Cord)。牽張反射是屬於脊髓反射(Spinal Reflex Pathway),它的神經路徑只 到脊髓(Spinal Cord)。其神經路徑為,當肌梭偵測到肌肉長度的快速變化, 神經訊號透過傳入神經(Afferent Axon)傳導到脊髓的運動神經元(Motor Neuron),脊髓接收後透過傳出神經(Efferent Axon)傳導訊號到肌肉,使肌肉 產生收縮(Contraction),其神經傳導路徑如圖 3。 Spinal reflex pathway Long-loop reflex pathway Supraspinal regions Stretch receptor Muscle Motor neurons
圖 3 牽張反射神經傳導路徑
牽張反射(Stretch Reflex)之訊號組成可分為短潛伏期(Short Latency, SL) 反射與長潛伏期(Long Latency, LL)反射,分別稱為 M1 與 M2[49-51]。在以 往部分文獻有將長潛伏期反射又分成中潛伏期(Medium Latency, ML)反射 與長潛伏期反射兩種,稱為 M2 與 M3[52, 53]。然而,在許多人類受測者可 能無法清楚定義出中潛伏期反射[51],且中潛伏期與長潛伏期均屬於
Long-loop Reflex (Pathway),與大腦皮質有關[49, 50, 54, 55],故本研究採用 前者作法將牽張反射分為 M1(SL)與 M2(LL)。短潛伏期屬於 Spinal Reflex (Pathway),其路徑為純脊髓路徑(不包含大腦皮質),而中潛伏期與長潛伏期 屬於 Long-loop Reflex (Pathway),其路徑包含了大腦皮質。在手部肌肉(Hand Intrinsic Muscle),短潛伏期之出現時間(潛伏期) (Onset Latency)一般為
20~40ms,持續時間(Duration)為 10~20ms,中潛伏期之出現時間(潛伏 期)(Onset Latency)為 40~60ms,持續時間(Duration)為 20~40ms,長潛伏期
Entensor muscle Muscle sensory receptor Sensory (afferent) axon Spinal Cord Interneuron Motor (efferent) axons Flexor muscle
之出現時間(潛伏期) (Onset Latency)為 60~100ms,持續時間(Duration)為 10~40ms。在腳部肌肉之潛伏期,則可能因神經傳輸路徑長度而會有較長之 潛伏期,例如腳部之比目魚肌(Soleus),其短潛伏期之出現時間(潛伏期)為 在 35~55ms 之範圍,比起手部肌肉(Hand Intrinsic Muscle)較長。以第一背側 骨間肌(First Dorsal Interosseus, FDI)為例,牽張反射之肌電訊號樣本如圖 4[53]。 圖 4 牽張反射之肌電訊號樣本[53] 2.2 肌電訊號原理 肌電訊號(Electromyography, EMG)是肌肉作動時所產生的電子訊號,源 自肌纖維膜的一種生理變化,在不同的功能狀況下,肌肉所產生的電訊號 會有不同的調整。肌電訊號(EMG)也是一種用來記錄與分析肌肉電訊號的方 法,[e.g. 56]。 SL ML LL
肌肉的電位變化是由肌纖維膜內外的離子濃度變化而造成。肌纖維膜 是一半滲透膜,其由一離子幫浦(Pump)來改變此濃度。電位變化產生的流 程又可分為四個部份,(1)靜息狀態,(2)去極化,(3)復極化,與(4)產生動作 電位。在靜息狀態時,肌纖維膜外鈉離子濃度較高,肌纖維膜內鉀離子濃 度較高。去極化期間時,鈉離子流進,而鉀離子流出,此時就會造成電位 的變化。然後隨即電位又會下降達到原來的水準,此階段又稱復極化。經 過去極化與復極化而使肌肉產生動作電位(Action Potential),流程如圖 5 所 示。 圖 5 肌纖維膜電位變化流程 本研究以肌電訊號作為評估神經肌肉控制行為的依據。當肌肉在穩態 (Resting)時,肌電訊號所呈現的圖形為一水平線。當肌肉收縮(Contraction) 時,肌電訊號會出現許多波峰波谷,有如許多針狀的圖形,這段訊號出現 肌纖膜 電位差 Na+ K+ Na+ K+ + - Pump Extracellular Intracellular 肌纖膜 電位差 Na+ K+ Na+ K+ + - Extracellular Intracellular 肌纖膜 電位差 Na+ K+ Na+ K+ + - Extracellular Intracellular 穩態電位 去極化 復極化 -80mV +30mV Na 流進 Na 流出 穩態
的長度視肌肉收縮的維持時間而定。如圖 6 所示。 圖 6 肌電訊號圖形 肌肉穩態時 肌肉收縮時 250ms 0.1mV
三、研究方法 本章將詳細陳述實驗系統設計、實驗步驟、資料分析與統計分析。實 驗系統設計說明整個實驗設備的架設,包含實驗控制程式系統、振動裝置 系統、手指旋轉裝置系統、肌電訊號量測系統、手臂支撐系統與接地系統。 實驗步驟說明實驗的流程、實驗設定與相關的準備手續,包含受測者、慣 用手檢測、EMG 準備、受測者姿勢準備、最大自主收縮實驗、張力性振動 反射實驗與牽張反射實驗。資料分析說明牽張反射之訊號分析方式。統計 分析說明統計之分析目標與方式。 3.1 實驗系統設計 3.1.1 實驗系統架構 本實驗系統之主要目的為誘發手指牽張反射並量化其反射訊號,並比 較此反射訊號在該受牽動肌肉無振動與受振動情況下之差異。為了利用牽 張反射(Stretch Reflex)來評估振動(Vibration)的影響,所需之實驗裝置系統 主要功能有下列七個: 1.固定住手部(Hand)姿勢與支撐手臂(Forearm)重量,可做水平(如圖 7 之X-Y方向)之平移(Translation)與垂直(如圖 7之Z方向)之旋轉(Rotation) (設 X-Y為平行地表面,Z為重力加速度方向),如圖 7。
圖 7 手部支撐裝置自由度 2.同步控制所有實驗裝置,使能在指定的時間分別啟動或關閉各裝置。 3.給予手指肌肉振動刺激的輸入,能提供依需要在硬體極限內之不同頻 率與振幅之振動(設備最大提供頻率為11KHz,最大提供振幅12.7mm),並可 即時監控振動器施加於肌肉之接觸力值。 4.拉動手指使其產生牽張反射(Stretch Reflex)的現象,一可提供拇指 (Thumb) 、 食 指 (Index Finger) 或 小 指 (Little Finger) 以 掌 指 關 節 (Metacarpophalangeal, MCP) 為中心做最快每秒850度旋轉10至60度之機 構。另外,此機構需能防止旋轉角度過大,以免傷害受測者之手指。保護 裝置有兩個部份,包含硬體保護與軟體保護。硬體保護是以近接感測器, 並配合馬達極限開關功能來限制馬達的移動範圍。當馬達在近接感測器 4mm的距離內,馬達將會自動斷電,移動範圍為75%之限制範圍。軟體保護 則是在實驗控制程式中寫入最大的角度移動範圍,當輸入的命令移動範圍 超過設定值時,則實驗啟動將會無效。 5. 同 時 紀 錄 實 驗 過 程 中 手 指 肌 肉 之 肌 電 訊 號 (Electromyography, X Y Z
EMG),至少具備三個通道(Channels)之EMG。 6.即時肌電訊號(EMG)回饋之機制。 7.將所有系統共同接地,避免所擷取之訊號受到干擾。 為了達到這些功能,所建立實驗系統架構是由一組振動器與一組手指 旋轉裝置來產生這些機械動作,然後利用肌電訊號量測設備來測量手指肌 肉的肌電訊號(EMG),並且設計一組手臂支撐裝置來固定並支撐手臂重量, 而所有相關訊號,包含振動器命令訊號、EMG、馬達速度、馬達扭力、手 指加速度與振動器壓力值,皆透過具備類比輸出(Analog Output, AO)與類比 輸入(Analog Input, AI)功能之資料擷取裝置(Data Acquisition, DAQ)來記錄 或輸出。最後用LabVIEW (National Instruments Corp, Austin, Texas, USA)軟 體來撰寫控制所有實驗裝置與相關紀錄訊號的程式。 依上述功能架構之整體實驗系統裝置可分為五大部份,一為實驗控制 程式系統,二為振動裝置系統,三為手指旋轉裝置系統,四為肌電訊號量 測系統,五為手臂支撐裝置系統,全部由個人電腦(PC)、LabVIEW軟體、 馬達控制器(Controller)、伺服馬達(Servo Motor)、手指旋轉裝置、手臂支撐 裝置、振動器(Vibrator)、功率放大器(Power Amplifier)、資料擷取裝置(Data Acquisition, DAQ)與肌電訊號量測設備組成。而整體實驗系統架構是以個人 電腦(PC)上撰寫的實驗系統控制程式來同時控制振動裝置系統、手指旋轉裝
置系統與肌電訊號量測系統這三組裝置系統,並紀錄肌電訊號(EMG)、馬達 位置、轉速、與扭力。實驗系統架構如圖 8。 圖 8 實驗系統架構. 系統功能主要分為三個部份,並由電腦來控制,其中 電腦由實驗控制程式控制。ㄧ為透過馬達控制器控制手指旋轉裝置作動, 二為透過類比輸出之資料擷取裝置控制振動器作動,三為透過類比輸入功 能之資料擷取裝置擷取各系統傳回之資料。FDI 為第一背側骨間肌,APB 為外展拇短肌,ADM 為外展小指肌,AO 為類比輸出功能之資料擷取裝置, AI 為類比輸入功能之資料擷取裝置,DAQ 為資料擷取裝置。 PC Controller AO DAQ AI Finger Stretching Device Vibrator EMG Amplifier ° ° 60~ 10 Muscle Vibration Finger Rotation EMG Velocity、 Contact Force APB FDI ADM 3 channel Motor Power Amplifier
3.1.2 實驗控制程式系統
實驗控制程式由LabVIEW 8.2 (National Instruments Corp, Austin, Texas, USA)撰寫,其中馬達控制的部份透過Galil Motion Control, Rocklin,
California, USA.所提供之動態連結檔(Dynamic Link Library)來達成。實驗控 制程式的目的主要用來控制振動器、資料擷取裝置、手指旋轉裝置與肌電 訊號量測設備,決定各裝置的控制時序,以及執行之次數,並將資料存檔 至電腦中。實驗控制程式分為人機介面與程式流程兩部分說明如下。 人機介面即程式的控制介面,操作者輸入相關之參數,程式便依照條 件的執行。人機介面分為三個頁面,一是受測者資料設定頁面,二是手指 旋轉裝置位置調整頁面,三是實驗參數設定與訊號監控頁面。受測者資料 設定頁面是用來設定受測者的相關資料,包含受測者編號、受測手(右手/ 左手)、測量肌肉(APB/FDI/ADM)、手指旋轉方向(Add/Flex)與振動器開啟(有 /無),此資料將寫入參數記錄檔(如圖 9)。一個trial的資料對應一個參數記錄 檔,參數紀錄檔為txt檔案格式,參數紀錄檔內容如圖 10。每次實驗開始後 自行命名,並選擇要存檔之路徑,當所有trial執行完畢後,資料與參數紀錄 存在同一路徑之位置(如圖 11)。資料紀錄檔用文字檔的方式開啟,其格式 如圖 12。手指旋轉裝置位置調整頁面是用來調整手指夾具的位置,可設定 手指夾具移動角度(以正負為方向)、手指夾具移動加減速度(實際以機構與 馬達增益為準)、手指夾具絕對位置、手指旋轉裝置啟動與停止(手指夾具移
動速度在實驗參數設定與訊號監控頁面設定),如圖 13。實驗參數設定與訊 號監控頁面是用來設定執行實驗的相關參數設定與監控擷取之訊號,如圖 14。實驗設定的參數包含振動器頻率、振動(訊號)振幅、執行次數(Trial)、 馬達旋轉角度與速度。實驗中,程式可即時顯示目前之執行參數,包含現 在執行次數(Trial)、每次振動時間、命令速度、馬達啟動延遲、馬達旋轉時 間與DAQ記錄時間,同時也顯示擷取到的資料圖形,包含移動角度、速度、 扭力、振動器壓力、手指加速度與EMG。 圖 9 受測者資料設定頁面 控制頁面選擇
圖 10 參數紀錄檔內容 圖 11 參數與資料紀錄形式. 參數紀錄檔名紀錄形式為 1、2、3、…等等, 其中 1 為第一個 Trial,2 為第二個 Trial,以此類推,檔案類型為 txt 文字檔。 資料紀錄檔名紀錄形式為 1_年-月-日_時間_Trial。例如: 1_08-08-15_1731_001,其中 08-11-03 分別為日期之年月日,代表記錄日期 為 2008 年 8 月 15 日,1731 表示記錄時間為下午五點三十一分,001 為第 一個 Trial,如為 002 則為第二個 Trial,以此類推。 參數紀錄 資料紀錄
圖 12 資料紀錄檔內容 圖 13 手指旋轉裝置位置調整頁面 紀錄通道數 紀錄樣本數 X 軸時間(秒) Y 軸電壓(伏特) Y 軸加速度(Gravity) 控制頁面選擇
圖 14 訊號監控頁面 程式流程圖為實驗控制程式之核心,所有程式執行之邏輯或語法在此以 流程圖(Block Diagram)的方式撰寫。為了配合各裝置的啟動時序,預設各裝 置的啟動時序如圖 15。 實驗開始 執行鈕 馬達速度 馬達扭力 EMG 參數設定 參數顯示 馬達位移
圖 15 開啟振動裝置控制時序. 實驗一開始先啟動資料擷取裝置(DAQ)紀 錄資料,並持續至振動器關閉 0.5 秒後(或手指轉動完畢 1.5 秒後),經過 0.5 秒後,如有振動則開啟振動器,且持續至手指轉動完畢 1 秒後,如不施加 振動則不開啟振動器,然後同時等待一隨機 1 至 3 秒的時間,在啟動馬達 開始轉動手指產生牽張反射現象,在振動器關閉後即為 1 個 Trial,下一個 Trial 在振動器關閉 7 秒後開始。 3.1.3 振動裝置系統 振動裝置系統的主要目的是對手部肌肉施加振動刺激,系統架構如圖 16。振動系統是由個人電腦 (PC)、資料擷取裝置(DAQ)、功率放大器(Power Amplifier)、振動器(Vibrator)、力規(Load Cell)與支撐架組成,振動裝置如 圖 17。振動系統的流程是,PC 驅動 DAQ,使 DAQ 產生欲輸出的波形訊 號(Sine 波),功率放大器(Power Amplifier)再將 DAQ 送過來的訊號放大,並 傳送給振動器,使振動器依據訊號輸出機械式振動。
馬達 振動器
圖 16 振動系統架構. 振動系統功用為控制振動器給予受測者手部肌肉振 動刺激。振動系統由電腦控制給予 NI-9263 一 Sine 波形,其中電腦由實驗 控制程式控制,而 NI-9263 則輸出 Sine 訊號給予功率放大器,功率放大器 將訊號放大後驅動振動器給予受測者振動刺激,而力規則透過 NI-9239 持續 傳回振動器與手部肌肉之接觸力至電腦。DAQ 為資料擷取裝置,NI-9263 為類比輸出之資料擷取裝置,NI-9239 為類比輸入之資料擷取裝置。 圖 17 振動裝置系統 PC 的功能是透過實驗控制程式控制振動器,可調整振動器的振幅、時 間與頻率,並紀錄接觸力值資料。程式所設定之振幅為控制訊號振幅(Sine 波峰波谷),非振動器實際輸出振幅(Peak-Peak, mm)。實際振幅與訊號振幅、 振動頻率與功率放大器 GAIN 大小有關。實際振幅根據手冊之參考計算公 式如(1)式。有負載(0.4N)與無負載之振動器加速度量測結果顯示,在有負載 (0.4N)情況比起無負載下,有負載(0.4N)之振動振幅大小為 95%無負載下之 振動器 支撐架 力規
PC Power Amplifier Vibrator Finger
Muscle Vibration
Load
NI-9263
NI-9239 Contact Force DAQ
振動振幅,結果如圖 18。 圖 18 振動器加速度曲線. 左圖為無負載之振動器加速度曲線,右圖為有負 載之振動器加速度曲線。
(
at
N
)
f
g
D
95
%
0
.
4
0511
.
0
2×
=
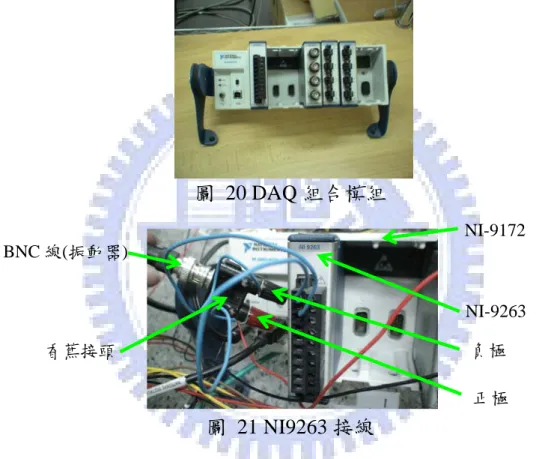
(1) D=振幅(Peak-Peak) (inches) g=加速度(以重力為單位) f=頻率(Hz) 資料擷取裝置 (DAQ)的功能是提供類比訊號的輸出,讓 PC 來控制振 動器,並可以透過程式來給予振動器各種不同的波形訊號(Sine、Square 或 Saw 等等),而此振動器主要是接收 Sine 訊號來作動。資料擷取裝置(Data Acquisition, DAQ)採用 cDAQ-9172 與 NI-9263(National Instruments Corp, Austin, Texas, USA),如圖 19。NI cDAQ-9172 是用來固定安裝其他 cDAQ 的機箱模組,並供應電源,提供 USB 介面與 PC 連接,整合相關輸出輸入 模組。NI-9263 為 cDAQ 系列的類比輸出模組,具備 4 個通道、100 kS/s 的 取樣率、16 位元解析度與正負 10V 的電壓範圍,其功能是輸出要求的類比 訊號驅動振動器。整體 DAQ 裝置如圖 20 與圖 21。
圖 19 DAQ 的類比輸出模組. 左圖為 NI-9172 介面,右圖為 NI-9263 介面。
圖 20 DAQ 組合模組
圖 21 NI9263 接線
功率放大器(Power Amplifier)是將DAQ所送出的訊號放大,以供給振動 器驅動電源,使振動器產生振動,如圖 22。功率放大器(Power Amplifier) 採用Linear Power Amplifier PA-119(Labworks Inc, Costa Mesa, California, USA)。功率放大器規格如表 1。而控制功率放大器放大倍率的機能在正面 面板上的GAIN旋鈕,如圖 23。為實驗設定方便,一般以轉至最大當做基 準(圖22中旋鈕位置為最小)。為了抑制訊號雜訊,此設備將會共同接地至馬 香蕉接頭 BNC 線(振動器) NI-9172 NI-9263 正極 負極
達電源插座之接地。
圖 22 功率放大器
表 1 功率放大器規格表
項目 規格
Output voltage (continuous)
1Hz to 2KHz 19.0 Vrms DC to 0.1Hz 26.0 Vdc/pk Random voltage output
2.5 sigma peak volts 11.3 Vrms 3.0 sigma peak volts 9.4 Vrms Signal/noise ratio 100 dB
Voltage gain 50 (34dB) max
圖 23 功率放大器正面面板 振動器(Vibrator)的功能則是輸出機械式振動使手指肌肉振動。支撐架 的功能是將振動器作固定,並可調整振動器的位置。振動器(Vibrator)採用 電源開關 GAIN 旋鈕 電壓與振幅顯示
Electrodynamic Shaker ET-132-2(Labworks Inc, Costa Mesa, California, USA)。振動器規格如表 2。
表 2 振動器規格表
項目 規格
Sine force 7 lbf force pk Random force 5 lbf rms random Shock force 21 lbf pk shock Frequency range DC-11KHz Max. Displacement 0.5 inch pk-pk Suspension stiffness 15 lbs/in Shaker weight 6 lbs
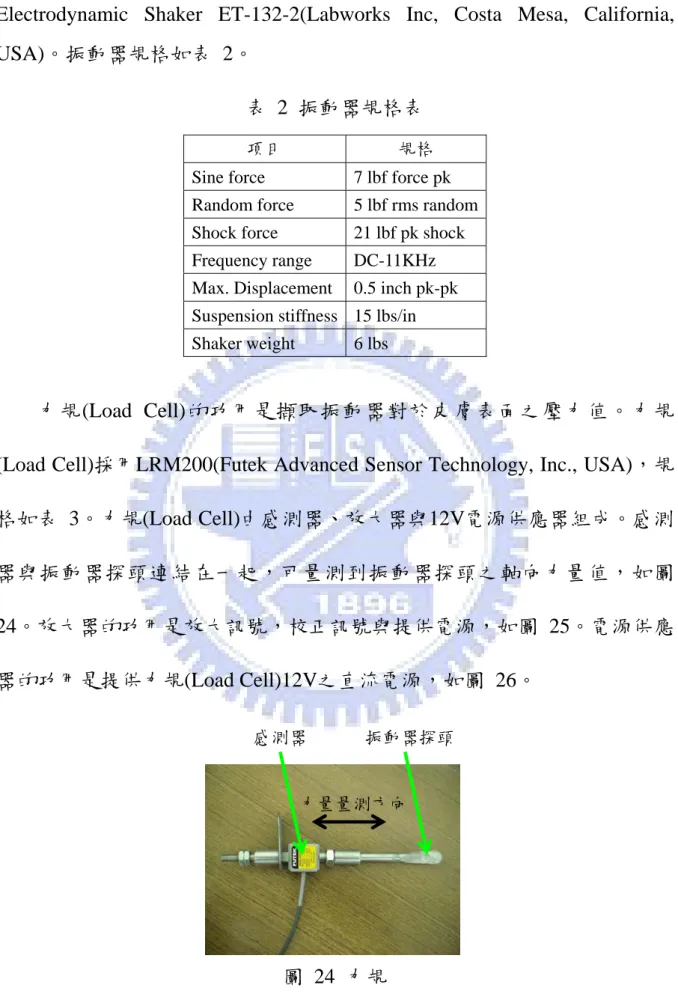
力規(Load Cell)的功用是擷取振動器對於皮膚表面之壓力值。力規 (Load Cell)採用LRM200(Futek Advanced Sensor Technology, Inc., USA),規 格如表 3。力規(Load Cell)由感測器、放大器與12V電源供應器組成。感測 器與振動器探頭連結在一起,可量測到振動器探頭之軸向力量值,如圖 24。放大器的功用是放大訊號,校正訊號與提供電源,如圖 25。電源供應 器的功用是提供力規(Load Cell)12V之直流電源,如圖 26。 圖 24 力規 感測器 振動器探頭 力量量測方向
圖 25 力規放大器 圖 26 電源供應器 表 3 力規規格表 項目 規格 最大量測力 5 lb(22N) 輸入電壓 12 Vdc 頻率反應 1000Hz 輸出電壓 5 Vdc 輸出方式 Bipolar 3.1.4 手指旋轉裝置系統 手 指 旋 轉 裝 置 系 統 的 目 的 是 帶 動 手 指 繞 著 掌 指 關 節 (Metacarpophalangeal, MCP)作旋轉,促使手指肌肉因快速伸展而造成牽張反 校正鈕 感測器連接端 DAQ 連接端 電壓輸出(12VDC) 電壓輸入(110VAC)
射(Stretch Reflex)。手指旋轉裝置系統是由個人電腦(PC)、馬達控制器 (Controller)、伺服馬達(Servo Motor)、手指旋轉裝置、資料擷取裝置(DAQ) 與支撐架。而伺服馬達(Servo Motor)是由驅動器(Driver)、馬達(Motor)與編 碼器(Encoder)組成,手指旋轉裝置系統架構如圖 27。 圖 27 手指旋轉裝置系統 PC的功能是藉由馬達控制器來控制馬達啟動的時間、馬達位置與馬達 轉速。馬達控制器(Controller)的功能是送出命令訊號給馬達,其規格如表 4。其配件包含控制器、37Pin排線、接線台、電源供應器與網路線(跳線), 如圖 28。馬達控制器(Controller)將PC送來的命令訊號轉成類比訊號後,再 將該訊號傳給馬達驅動器(Driver)。命令訊號的形式是以「脈波列」(PULSE) 加「符號」(SIGN)傳送,如圖 29。「脈波列」決定馬達要移動多少位置或 速度,「符號」決定馬達的移動方向為逆時鐘或順時鐘。命令分周率決定 馬達每一轉切割為多少脈波(Pulse),預設是每轉分為10000Pulse,即10000
PC Controller Driver Motor Encoder
Finger Finger Rotation Finger Stretching Device DAQ NI-9239 Velocity、Torque
脈波等於360度。當移動角度設定為10000Pulse,則代表馬達移動360度,而 正為逆時鐘旋轉,負為順時鐘旋轉。當移動速度設定為10000Pulse,則代表 馬達移動速度每秒360度。接線台的功用是將每個控制器的功能以單一腳位 的方式輸出,接線台輸出的另一端即為驅動器之接線台,兩邊連接相對應 之功能腳位。網路線是用來連接PC,作為PC與控制器之間的訊號通訊用。 圖 28 控制器與驅動器接線 表 4 控制器規格表 項目 規格 形式 獨立型 通訊介面 Ethernet 10BaseT 軸數 2 最大編碼器回授率 12MHz 最大步進輸出頻率 3MHz 位置解析度 32bit 速度解析度 12M/s 加速度解析度 67M/s^2 最小伺服更新率 250us 驅動器接線台 控制器 37Pin 排線 接線台 電源供應器 網路線介面
圖 29 控制訊號定義
驅動器(Driver)採用 MCDDT3520(Panasonic Corp, Kadoma City, Osaka, Japan),功能是將控制器所送過來的控制訊號轉換成馬達可接受的格式並放 大,以驅動馬達,同時也接收與輸出來自編碼器(Encoder)之回授訊號,透 過編碼器(Encoder)之回授訊號可得知馬達的運動狀態(如圖 30)。另外,驅 動器(Driver)也作為馬達電源供應、馬達控制模式設定與增益調整等之功 用。編碼器訊號分為三相,分別是 ABZ 相。透過 AB 相的脈波數量與時間 的長度可得知馬達之轉速。接地是用來作為馬達各訊號之接地用,也可用 來集中其他設備之接地線至電源插座接地。為了降低雜訊之干擾與人員觸 電,所有設備都將接地線連接至驅動器之接地,然後驅動器之接地再連接 電源插座之接地,即所有設備共地。依據機構特性,伺服馬達增益調整相 關參數需經過多次測試才能找出較佳的設定值。調整增益參考之依據為馬 達速度曲線圖、馬達扭力曲線圖、馬達運轉噪音與馬達運轉振動。 逆時鐘 順時鐘 脈波列 符號
圖 30 驅動器正面面板
資 料 擷 取 裝 置 (Data Acquisition, DAQ) 採 用 cDAQ-9172 與 NI-9239(National Instruments Corp, Austin, Texas, USA)。NI-9239為一類比輸 入模組,其安裝在cDAQ-9172上,用來擷取類比電壓,具備4通道,將用兩 組NI-9239(共8通道)來擷取3組EMG訊號、1組驅動器之轉速監控訊號、1組 驅動器之扭力監控訊號與力規(Load Cell)訊號。此系統中,DAQ的功能是擷 取驅動器傳送來之類比電壓訊號,分別是扭力監控訊號與轉速監控訊號。 轉速與扭力監控訊號之換算比分別為6V/188r/min與3V / 400%額定扭力。
馬達(Motor)採用MHMD082P1S交流伺服馬達(Panasonic Corp, Kadoma City, Osaka, Japan),額定功率為750W,額定扭矩為2.4N-m(瞬時最大扭矩為 7.1N-m),功能則是輸出扭力給手指旋轉裝置,使其運動,馬達固定在手指 旋轉裝置上,規格如表 5。馬達之負載慣量為主動輪慣量加上被動輪慣量。 驅動器接線台 接地 驅動器 伺服馬達連 編碼器連接 控制器連接 控制器 控制器接線台 PC 連接
主動輪慣量與被動輪慣量分別為9.395kg-cm^2與27.807kg-cm2。馬達之負載 慣量為37.202kg-cm2,如(2)式。質量之密度計算以鋁為2.72 g/cm3,鋼為8.6 g/cm3。負載慣量之尺寸如附錄一。 表 5 伺服馬達規格表 項目 規格 額定輸出 750W 額定轉矩 2.4N-m 額定電流 4Arms 額定轉速 3000RPM 轉子轉動慣量 1.51*10-4kg*m2 旋轉編碼器規格 2500P/r 增量型 單圈解析度 10000 被動輪慣量 主動輪慣量 馬達負載慣量= + 2 395 . 9 kg cm Ia= ⋅ 主動輪慣量 2 807 . 27 kg cm Ip = ⋅ 被動輪慣量 3 / 2.72g cm = 鋁密度 3 / 8.6g cm = 鐵密度 2 202 . 37 807 . 27 395 . 9 + = kg⋅cm = 馬達負載慣量 (2) 編碼器(Encoder)的功能是擷取馬達確實的扭力與轉速,並將訊號傳回 給驅動器(Driver),驅動器(Driver)再傳回給DAQ,讓PC來記錄。由AB相之 相位差則得知馬達隻旋轉方向。Z相為馬達旋轉圈數輸出,當馬達旋轉一 圈,Z相則輸出一脈波訊號。編碼器訊號格式如圖 31。
伺服馬達 手指旋轉裝置 圖 31 編碼器訊號格式 手指旋轉裝置的功能是固定並轉動手指頭,讓手指頭以MCP為中心旋 轉,手指旋轉裝置系統的架設如圖 32與圖 33。手指旋轉裝置可依實驗的 需求來改變旋轉之平面為水平或垂直。而其中利用兩組近接感測器來作為 逆時鐘與順時鐘方向之極限開關,限制機構移動的範圍,並且可由實驗操 作者自行調整,如受測者手指實驗需移動30度,則限制範圍為35至40度。 詳細零件設計圖如附錄一。 圖 32 手指旋轉裝置水平架設 逆時鐘 順時鐘 A 相 B 相 Z 相 B 相落後 A 相 B 相超前 A 相
圖 33 手指旋轉裝置垂直架設 3.1.5 肌電訊號量測系統 肌電訊號量測系統的主要目的是將中樞神經系統控制肌肉動作時,記 錄肌肉本身所產生的電位變化。肌電訊號量測系統主要由三個部份組成, 個人電腦(PC)、資料擷取裝置(DAQ)與肌電訊號量測設備,系統架構如圖 34。PC的功能是擷取與儲存肌電訊號的資料,並且控制肌電訊號量測設備 的開啟時間與時間間距。肌電訊號量測設備的主要功能是擷取肌肉的電訊 號並將其放大,進一步避免雜訊(Noise)影響到肌電訊號。因肌電訊號是非 常小的訊號,範圍在正負5mV以內,故訊號在傳送時很容易受到其他外來 訊號的干擾。 肌電訊號量測系統的流程為當肌肉動作產生電位差,電極測量到此訊 號後,前置放大器將該訊號先放大後再傳給轉接器(Patient Unit),轉接器 (Patient Unit)再透過傳輸線(Transmission Cable)將訊號傳給主放大器放大,
極限開關
主放大器將訊號放大後透過BNC介面將訊號傳給DAQ的類比輸入模組, DAQ將訊號轉換為數位後透過USB界面傳到PC中。
圖 34 肌電訊號量測系統
資 料 擷 取 裝 置 (Data Acquisition, DAQ) 採 用 cDAQ-9172 與 NI-9239(National Instruments Corp, Austin, Texas, USA)。NI-9239為一類比輸 入模組,其安裝在cDAQ-9172上,用來擷取類比電壓,具備4通道,將用兩 組NI-9239(共8通道)來擷取3組EMG訊號、1組驅動器之轉速監控訊號、1組 驅動器之扭力監控訊號與力規(Load Cell)訊號。DAQ的功能是擷取類比電壓 訊號,類比的肌電訊號轉換成電腦可以接收的數位訊號,並將此訊號傳送 給電腦。
肌電訊號量測設備採用AMT-4(Bortec Biomedical Ltd, Canada)來擷取兩 組肌肉之EMG,其規格如表 6。肌電訊號量測設備是由主放大器(Main Amplifier)、轉接器(Patient Unit)、前置放大器(Pre-amplifier)與電極貼片 (Electrode)組成,在這部分的訊號為類比訊號,如圖 35。主放大器(Main Amplifier)的功能是接收轉接器(Patient Unit)的訊號,並將訊號解碼與放大。 主放大器正面面板用來調整放大倍率,背面面板則連接各輸出輸入訊號 線 。 轉 接 器 (Patient Unit) 的 功 能 是 連 接 與 分 配 電 力 給 各 個 前 置 放 大 器 (Pre-amplifier),並將前置放大器(Pre-amplifier)所傳來的訊號編碼傳給主放 大器(Main Amplifier),如圖 36。前置放大器(Pre-amplifier)的功能是將肌電 訊號在電極附近時就給予放大,並抑制雜訊,如圖 37。每個通道的前置放 大器除了連接貼在電極貼片的兩極外,還須連接一個參考電位(即地線),此 點為尺骨莖突(Processus Styloideus Ulnae),如圖 38。含有地線之前置放大 器必須連接至轉接器(Patient Unit)的插孔1。電極貼片(Electrode) 採用Dual Electrodes(Noraxon Inc, USA)。電極貼片(Electrode)是用來量測肌肉的電位 差,為雙極式貼片(Bipolar),兩極間距為2cm,電極貼片塗上可幫助導電的 銀與氯化銀(Ag/AgCl)凝膠。在貼上電極貼片時,需將電極貼片貼在肌腹 (Muscle Belly)的位置,另一個電極貼片則貼在關節處或骨頭突出處(Bony Landmark)作為參考電位。
圖 35 肌電訊號量測設備
表 6 肌電訊號量測設備規格表
項目 規格
Number of channels 4
Mode Differential(input pre-amplifiers) Frequency response 10Hz-1000Hz each channel (-6dB at 1000Hz)
Input impedance ~10 Gohm(theoretical) Common Mode Rejection 115dB typical(at 60 Hz)
Fixed gain values 100,200,500,1000,2000,5000 Variable gain range 1-3 continuous
Inter-channel crosstalk Better than -50dB at 100Hz all channels Noise 4.5uV r.m.s, (10Hz-3kHz)
Output signal swing 8.0Vpp max. without clipping (single ended) Output connectors BNC standard
圖 36 轉接器(Patient Unit) 前置放大器插孔 主放大器插孔 電池包 前置放大器 轉接器 主放大器 電極貼片
圖 37 前置放大器 圖 38 尺骨莖突 3.1.6 手臂支撐系統 手臂支撐系統的目的是提供受測者的手臂在各種不同姿勢下的支撐, 主要支撐重力方向。手臂支撐系統底部支撐由市面可以買到的滑鼠手臂支 撐架來改裝完成,可調整高度與手臂支撐系統的方位。其中將手臂支撐墊 的部份換成一組面積較大的平板,而平板是由兩片塑鋼(PE)板組裝上兩滑 軌,其中一滑軌的功能是調整兩片PE板的相對距離以適應不同手臂長度的 受測者,另一滑軌則是用來裝配滑鼠手臂支撐架並可調整在滑鼠手臂支撐 架上的支撐點。PE板的前端裝上兩組PE柱,形成一U型架構來固定住手掌 之姿勢,兩PE柱的間距可以調整以符合不同手掌厚度之受測者。經由改裝 差動輸入 地線 尺骨莖突
後的手臂支撐系統具有5個自由度,且可達到支撐重力方向的需求。手臂支 撐裝置如圖 39。 圖 39 手臂支撐系統 3.1.7 接地系統 為了防止人員觸電、雷擊損壞、並確保設備電路正常與降低訊號之干 擾,所有設備將做設備接地。如無做接地之動作,則 EMG 訊號之雜訊將會 增大。所有設備,包含 DAQ 、EMG 量測設備、振動器與伺服馬達作共同 接地之動作,分別如圖 40 至圖 43。連接方式為 NI-9172 、EMG 主放大器 與振動器之功率放大器的接地線連接到伺服馬達驅動器之接地點,然後驅 動器之接地線再透過電源線接至電源插座之接地,如圖 44。
圖 40 接地系統 圖 41 DAQ 接地 圖 42 EMG 量測設備接地 外殼接地 外殼接地 DAQ EMG 振動器 馬達驅動器 電源系統接地 接地線 接地 線
圖 43 振動器接地 圖 44 伺服馬達接地 3.2 實驗步驟 3.2.1 實驗設計說明 本研究之實驗主要目的為量測在振動肌肉與無振動肌肉的條件下,牽張 反射之大小與出現之時間(潛伏期)。在進行牽張反射實驗前,將做前置準備 步驟以決定牽張反射實驗之三項實驗條件,包含受測者慣用手、肌肉最大 出力值與振動之振幅。牽張反射實驗檢測的手為受測者之慣用手。而為了 排除不同受測者間之肌肉狀態、表皮狀況及反射大小的差異性,實驗量測 之牽張反射大小將對各受測者本身之肌肉最大出力作標準化,這部份為最 大自主收縮實驗。牽張反射實驗給予之振動振幅則由張力性振動反射實驗 外殼接地 外殼接地
與口頭詢問受測者是否有假想動作決定。
3.2.2 受測者
十名手部活動功能正常的男性受測者(年齡平均為 24.1±1.5 歲,身高平 均為 178.1±5.4 公分,體重平均為 76.3±14.3 公斤)參與此研究。篩選受測者 的條件為沒有任何肢體殘障、脊髓損傷(Spinal Cord Injury)或其他影響手部 肢體動作的病症或病歷,包含會使得受測者無法正常執行原有肢體活動功 能的物理性外傷,也不得有其他相關之神經系統疾病,如運動神經元傷害 的症狀。實驗之主要測試部位為第一背側骨間肌(First Dorsal Interosseus, FDI),外展拇短肌(Abductor Pollicis Brevis, APB)與外展小指肌(Abductor Digiti Minimi, ADM),此三條肌肉均屬於手掌內肌(Hand Intrinsic Muscles)。 本實驗通過長庚醫學院人體試驗倫理委員會審核,同意進行臨床試驗,案 號 96-1191B。受測者在實驗前均簽署受試者同意書,並了解實驗過程與項 目。
3.2.3 慣用手檢測
決定最大自主收縮實驗、張力性振動反射實驗與牽張反射實驗時之受 測手,受測者將填寫慣用手檢測表格(Edinburgh Handedness Inventory),並 以該表格的結果來決定受測手(如附錄二)。
3.2.4 EMG 準備
用酒精棉片與磨砂膏清潔受測手之大拇指、食指與小拇指肌肉(APB、 FDI、ADM),清潔完後將 EMG 電極貼片順著肌肉方向貼上各肌肉之肌腹 (Muscle Belly)位置。為了防止因受測者手汗或移動手部而造成 EMG 貼片脫 落,另外使用藥用通氣膠布幫助固定貼片與前置放大器線路,如圖 45。
圖 45 受測者 EMG 貼片準備. 左圖為 FDI 位置貼片,右圖為 APB 與 ADM 位置貼片。 3.2.5 受測者姿勢準備 受測者姿勢維持臀部、膝蓋、腳踝的角度在 90 度。然後將受測者之受 測手以中性姿勢(Neutral)固定在手臂支撐架上,使肩膀屈曲(Flexion)45 度、 外展(Abduction)30 度,且手肘伸張(Extension)135 度。並且在實驗過程中放 鬆手部與手臂之肌肉,除了受測手需做固定程度之等長收縮(Isometric Contraction)外。受測者姿勢如圖 46。 圖 46 受測者姿勢
3.2.6 最大自主收縮實驗(Maximum Voluntary Contraction)
最大自主收縮(Maximum Voluntary Contraction, MVC)實驗是用來取得 將牽張反射數據標準化之 MVC 值,並決定 EMG 放大器之可放大之最大倍 率。最大之可放大倍率以不超出±10V 為準。以手指旋轉裝置作為阻擋受測 者手指方向出力,將受測者以 MCP 為中心固定手指(大拇指、食指與小拇 指)後,請受測者手指以外展(Abduction)方向出最大的力量,並做 EMG(與 放大倍率)的紀錄。總共做三次,每一次做三秒鐘。數據處理時,每一次取 中間兩秒鐘,取三次平均為 MVC 之值。
3.2.7 張力性振動反射實驗(Tonic Vibration Reflex)
張力性振動反射(Tonic Vibration Reflex, TVR)實驗目的為量測引起肌肉 張力性振動反射(TVR)或假想動作(Illusory Movement)之振動振幅(Peak to Peak)。振動振幅以一單軸加速規來量測(如圖 47),加速規裝置在振動器探 頭的平台上,並將振動放大器之 GAIN 調整至最大(固定 GAIN 之基準)。力 規校正完畢後,開始測試 APB、FDI 與 ADM 之振動反射振幅大小,將振動 器與肌肉之接觸力維持在 0.4N(壓力)左右。然後給予受測者 80Hz 頻率之振 動,振動振幅從 0~1mm 調整,以每次增加 0.11mm,直到任一肌肉 EMG 出 現收縮訊號為止,或是詢問受測者是否肌肉有產生虛位移之感覺,再取其 振動之振幅(Peak to Peak)。每次振動時間為持續 20 秒,每次振動測試完休 息至少 10 秒,同時紀錄手部三條肌肉(APB、FDI、ADM)之 EMG。牽張反
射實驗之振動振幅取最小出現 TVR 或假想動作(Illusory Movement)之振幅 再減去 0.11mm。 圖 47 加速規設置 3.2.8 牽張反射實驗(Stretch Reflex) 牽張反射實驗目的為量測受測者手指肌肉 APB、FDI 與 ADM 分別在有 振動與無振動下之牽張反射現象。受測者之受測手以 MCP 為中心等速旋 轉,旋轉方向為外展與內縮(Abduction/Adduction),並同時記錄其三條手部 肌肉(APB、FDI、ADM)之 EMG,每個手指分別以有振動與無振動之條件 量測,且隨機選擇欲執行量測之手指。振動頻率設定為 80Hz,振動振幅取 最小出現 TVR 或假想動作(Illusory Movement)之振幅再減去 0.11mm。為了 使受測者之牽張反射更容易出現,在實驗開始前(手指轉動前) ,受測者的 受測肌肉做預收縮(Pre-active)之動作,使受測肌肉在實驗過程中一直維持一 固定的活動程度(Activation)。實驗過程中,利用示波器讓受測者本身即時監 測(Visual Feedback)受測肌肉的活動程度(Activation),受測者須做 20%MVC 加速規 加速規量測方向 (振動方向)
之活動程度(Activation)(依受測者之能力適度選擇),盡可能的維持固定在同 一水準,如圖 48。手指之旋轉速度為每秒 850 度,加速與減速時間為 15~20ms,速度曲線如圖 50。手指之旋轉角度為 30 度,扭力曲線如圖 49。 振動肌肉時,將振動器探頭調整至可以振動肌肉之位置(手指旋轉裝置在手 掌背方向,振動其探頭由外往內手掌心方向)。如需旋轉小拇指時,需將手 臂固定的位置往前調整(兩塊靠枕支點分別為 MCP 與手腕),使小拇指外伸 於手臂固定裝置,如圖 51。每秒 6 度的速度用來量測機構對於手指阻力之 扭力大小,其他速度量測到之扭力均須減去此手指阻力之扭力(也須減去靜 態之扭力,維持機構位置之扭力),扭力之相減以兩者相對應之移動角度時 之扭力互減,如 5 度時之扭力相減,10 度時之扭力相減,以此類推,三條 手指肌肉均須做此被動阻力之量測。拉動受測者手指時的起始位置角度為 中性位置(Neutral),即定義為 0 度的位置。旋轉裝置將手指從中性位置 (Neutral)拉動至外展(Abduction)30 度,停止 7 秒鐘之後,再將手指拉動回手 指之起始位置角度,到此為兩個 Trial,以此順序重複執行。每組肌肉在有 振動與無振動之條件下均做 60 個 Trials 之實驗。
圖 48 受測者即時監測肌肉的活動程度 圖 49 每秒 850 度之扭力曲線 圖 50 每秒 850 度之速度曲線 圖 51 FDI 之牽張反射實驗. 左圖為有振動,右圖為無振動。 示波器提供肌肉活動程度 之視覺回饋 受測者 Actual Torque N-m 8 6 4 2 0 -2 -4 -6 -8 0.06 0.05 0.04 0.03 0.02 0.01 Time(s) Speed 0.06 0.05 0.04 0.03 0.02 0.01 100 0 -100 -200 -300 -400 -500 -600 -700 -800 -900 Time(s) Degree/s