外 牆 瓷 磚 非 破 壞 性 檢 測 之 研 究 -以 紅 外 線 熱 顯 像 技 術 結 合 無 人 飛 行 載 具 為 例 內 政 部 建 築 研 究 所 協 同 研 究 報 告 年 度 106
建築外牆瓷磚非破壞性檢測之研究-以紅外線熱顯像技術結合無人飛行
載具為例
建築外牆瓷磚非破壞性檢測之研究-以紅外線熱顯像技術結合無人飛行
載具為例
研 究 主 持 人 : 陳瑞鈴 協 同 主 持 人 : 張奇偉 研 究 員 : 林鎮華、張竣堯、周楷峻、厲娓娓 研 究 助 理 : 黃智偉、程冠銘 研 究 期 程 : 中華民國 106 年 2 月至 106 年 12 月內政部建築研究所協同研究報告
中華民國 106 年 12 月
目次
目次... I 表次... III 圖次... V 摘要... VIII ABSTRACT ... XIV 第一章 緒論 ... 1 第一節 研究緣起與背景 ... 1 第二節 研究目的與重要性 ... 2 第三節 研究方法、內容與步驟 ... 3 第二章 文獻回顧 ... 6 第一節 紅外線相關文獻 ... 6 第二節 影像合成之相關文獻 ... 23 第三節 無人載具相關法規 ... 27 第三章 實驗設計規劃 ... 32 第一節 實驗材料與設備 ... 32 第二節 瓷磚標準試驗 ... 42 第三節 影像尺寸及實例試驗結果 ... 62 第四節 紅外線無人飛行載具系統相關動態試驗 ... 67 第五節 撰寫技術手冊 ... 77 第四章 結論與建議 ... 82 第一節 結論 ... 82 第二節 建議事項 ... 83 參考書目... 85 附錄一 民用無人駕駛航空器系統空中交通管理辦法 ... 87 附錄二 中國民用航空局飛行標準司-輕小無人機運行規定 ... 93 附錄三 紅外線熱顯像技術結合無人飛行載具之技術手冊 ... 104附錄四 期中審查回覆表 ... 123
表次
表2-1 土木材料放射係數表 ... 7 表2-2 混凝土表面缺陷非破壞檢測技術之優缺點 ... 14 表2-3 紅外線及打診法相關參數特徵比較 ... 15 表2-4 紅外線檢測時之對策建議 ... 15 表2-5 牆面瓷磚診斷方法的適用性 ... 18 表2-6 外牆瓷磚剝落原因與防止對策 ... 19 表3-1 二丁掛瓷磚之規格 ... 33 表3-2 飛行器 ... 35 表3-3 視覺系統 ... 36 表3-4 遙控器 ... 36 表3-5 傳輸 APP ... 37 表3-6 紅外線 FLIR ONE 技術參數 ... 38 表3-7 INSPIRE 1 無人飛行載具 ... 39 表3-8 視覺系統 ... 40 表3-9 遙控器 ... 40 表3-10 傳輸 APP ... 40 表3-11 紅外線 zenmuse-xt 技術參數 ... 41 表3-12 第一塊瓷磚有/無缺陷 5~80 分鐘辨視結果 ... 44 表3-13 第二塊瓷磚有/無缺陷 5~80 分鐘辨視結果 ... 45 表3-14 第三塊瓷磚有/無缺陷 5~80 分鐘辨視結果 ... 46 表3-15 第四塊瓷磚有/無缺陷 5~80 分鐘辨視結果 ... 47 表3-16 第五塊瓷磚有/無缺陷 5~80 分鐘辨視結果 ... 49 表3-17 第六塊瓷磚有/無缺陷 5~80 分鐘辨視結果 ... 50 表3-18 第七塊瓷磚有/無缺陷 5~80 分鐘辨視結果 ... 51 表3-19 第八塊瓷磚有/無缺陷 5~80 分鐘辨視結果 ... 52 表3-20 FLIR ONE 紅外線鏡頭影像實際尺寸 ... 62 表3-21 兩種系統測試比較(一) ... 73表3-22 兩種系統測試比較(二) ... 74
表3-23 紅外線技術結合無人機載具(低階/高階)與傳統打診法之間的比較 ... 76
圖次
圖1-1 研究流程圖 ... 5 圖2-1 砂箱實驗與紅外線熱影像記錄 ... 7 圖2-2 海堤裂縫深度測量 ... 8 圖2-3 熱影像圖的不同溫度區判釋面磚黏貼性 ... 8 圖2-4 瓷磚黏貼品質檢測 ... 9 圖2-5 機場鋪面檢測結果(取自 Moroprulou et al.,2001) ... 10 圖2-6 建物外壁診斷及溫度變化圖例 ... 11 圖2-7 完整與裂縫煙囪之溫差比較(左:完整;右:含裂縫) ... 11 圖2-8 兩種技術 GPR 與 IR 在檢測混凝土孔洞的效果 ... 12 圖2-9 最大溫差和孔洞深度關係圖 ... 13 圖2-10 透地雷達與紅外線檢測成效 ... 13 圖2-11 脫層部位與健全部位間的溫度差異機制 ... 14 圖2-12 紅外線檢測流程及現地檢測建議 ... 16 圖2-13 紅外線表面缺陷顯像圖 ... 21 圖2-14 營管大樓外牆瓷磚溫度差別 ... 21 圖2-15 重疊度、耗時、拼接誤差曲線示意圖 ... 24 圖2-16 平差前後的對比圖 ... 25 圖2-17 UAV 影像 36 張連續自動拼接效果圖 ... 25 圖2-18 無人航空載具(UAV)載重分級管理 ... 27 圖2-19 無人航空載具(UAV)飛航限制 ... 28 圖2-20 民航局 UAV 飛行申請表 ... 29 圖3-1 石膏漿調製 ... 32 圖3-2 石膏試體製作 ... 32 圖3-3 黏著劑調製 ... 33 圖3-4 實驗所用二丁掛瓷磚 ... 33 圖3-5 黏著劑塗抹及凹凸面 ... 34 圖3-6 製造相對瓷磚背面不完整 ... 34圖3-7 無人載具紅外線系統 ... 35 圖3-8 瓷磚有/無缺陷之標準試體與設備配置 ... 42 圖3-9 瓷磚有/無缺陷試體配置 ... 42 圖3-10 紅外線熱影像圖(5~80 分鐘) ... 43 圖3-11 瓷磚有/無缺陷配置 ... 43 圖3-12 第一塊瓷磚有/無缺陷分析切割配置 ... 44 圖3-13 第二塊瓷磚有/無缺陷分析切割配置 ... 45 圖3-14 第三塊瓷磚有/無缺陷分析切割配置 ... 46 圖3-15 第四塊瓷磚有/無缺陷分析切割配置 ... 47 圖3-16 第五塊瓷磚有/無缺陷分析切割配置 ... 48 圖3-17 第六塊瓷磚有/無缺陷分析切割配置 ... 49 圖3-18 第七塊瓷磚有/無缺陷分析切割配置 ... 50 圖3-19 第八塊瓷磚有/無缺陷分析切割配置 ... 52 圖3-20 瓷磚有/無缺陷分析縱向切割配置 ... 53 圖3-21 第 1 等分-瓷磚溫度差異變化位置 ... 54 圖3-22 第 1 等分-八塊瓷磚溫度差異變化 ... 54 圖3-23 第 2 等分-瓷磚溫度差異變化位置 ... 55 圖3-24 第 2 等分-八塊瓷磚溫度差異變化 ... 55 圖3-25 第 3 等分-瓷磚溫度差異變化位置 ... 56 圖3-26 第 3 等分-八塊瓷磚溫度差異變化位置 ... 56 圖3-27 第 4 等分-瓷磚溫度差異變化位置 ... 57 圖3-28 第 4 等分-八塊瓷磚溫度差異變化 ... 57 圖3-29 第 5 等分-瓷磚溫度差異變化位置 ... 58 圖3-30 第 5 等分-八塊瓷磚溫度差異變化 ... 58 圖3-31 瓷磚辨視率% ... 59 圖3-32 瓷磚缺陷辨視率及影像分佈 ... 60 圖3-33 低溫試驗影像分佈結果 ... 61 圖3-34 擋土牆瓷磚品質檢測位置 ... 62
圖3-36 馬賽克瓷磚剝落與影像分析結果 ... 64 圖3-37 外牆瓷磚品質檢測位置 ... 64 圖3-38 擋土牆瓷磚剝落分析結果 ... 65 圖3-39 二丁掛紅磚實際照片與檢測影像 ... 66 圖3-40 3-D 夾具模型圖 ... 67 圖3-41 3-D 夾具透視圖 ... 67 圖3-42 3-D 列印夾具 ... 68 圖3-43 完成夾具與紅外線熱影像儀及智慧手機結合 ... 68 圖3-44 大樓外牆瓷磚檢測結果(一) ... 69 圖3-45 大樓外牆瓷磚檢測結果(二) ... 70 圖3-46 大樓外牆瓷磚檢測結果(三) ... 71 圖3-47 無人飛行載具紅外線檢測系統 ... 78 圖3-48 無人機檢測方向測線 ... 79 圖3-49 沿剝落位置逆時針向外延伸 ... 79
摘要
關鍵詞:無人飛行載具、紅外線鏡頭、瓷磚損傷、非破壞性檢測 一、研究緣起 近年來國內發生多起因建築物外牆瓷磚剝落,造成國民生命財產遭受損失之 事件。對於高樓層之外牆瓷磚損傷剝落辨視或檢測,都必需籍由垂吊或搭架方式 進行辨視檢測。因此,國內許多老舊大樓大多超過4 樓層以上之高度,如何建立 實際可行且可靠度高的辨視檢測技術,應為重要議題。目前實務上都是以敲擊瓷 磚表面配合目視檢測來判定瓷磚黏著程度,及配合紅外線技術以瓷磚表面溫度差 異辨視或統計特徵差異,而紅外線儀器角度及檢測時溫度差或現地環境(晴、雨 天等)中之各種不確定因素之影響,而造成判定上誤差。故本研究將建立無人飛 行載具掛設智慧型手機及紅外線鏡頭系統,並整合遠端遙控紅外線鏡頭進行高層 建築物外牆瓷磚剝落損傷非破壞性檢測,將檢測數據由雲端進行瓷磚剝落損傷擷 取與評估,並建立可靠度高、成本較低及全面性高層建築物外牆瓷磚損傷檢測方 法,降低檢測成本及減少人員垂吊風險;此技術整合開發之成果,可快速推廣及 解決老舊建築外牆瓷磚損傷辨視率問題,同時建立高樓建築瓷磚檢測標準診斷手 冊與操作程序,未來可全面針對二樓以上或高層大樓建築物瓷磚進行檢測。二、研究方法及過程 本研究分為三大階段,首先製作有/無缺陷之瓷磚牆試體標準組,並模擬不 同溫度之溫度差異之紅外線鏡頭之熱感應能力;進行損傷瓷磚紅外線檢測剝落位 置、範圍等基本辨識率,並測試不同量測距離(2m、3m、4m、5m)之實際顯像範 圍。 無損傷之瓷磚試體量測 損傷之瓷磚試體量測 一般紅外線皆可即時顯示瓷磚表面溫差之彩色分佈圖,但目前無明確統一之 實務瓷磚損傷判定準則及損傷範圍評估,如下圖所示。 損傷瓷磚 紅外線熱影像圖 故本研究第一階段建立靜態時以小型紅外線鏡頭之溫度分析方法,提高瓷磚 損傷非圖像定性判讀方法,明確分析損傷之位置及範圍。在第一部分所採用小型 紅外線鏡頭(熱感應鏡頭),可支援手機 iOS 及 Android 版本;首先測試紅外線鏡頭 之穩定性,暸解其硬體之系統誤差後,再進行有無缺陷之瓷磚牆試體標準組,並 模擬夏天、冬天之溫度差異之紅外線鏡頭之熱感應能力測試,建立相對應之瓷磚 損傷分析模式。 不同量測距離(2m~5m) 不同量測距離(2m~5m)
第二階段將小型紅外線鏡頭與無人飛行載具結合如下圖所示,製作無人機起 降時之停機模具,再以4G 無線傳輸進行遠端控制載具上之小型紅外線鏡頭 APP 介面,進行高樓瓷磚檢測,進行飛行載具及紅外線整合後之紅外線鏡頭之穩定性、 測試不同量測距離如2m、3m、4m、5m 之實際顯像範圍。 小型紅外線鏡頭APP 介面結合手機 (4G 無傳輸) 無人飛行載具與停機模具 第三階段建置之飛行載具及紅外線可量測之擷取範圍(長、寬)、像素(所對應 之實際尺寸),將高樓之即時顯示瓷磚表面溫差之彩色分佈圖重新繪製之整合技 術,如下圖所示。 損傷瓷磚 紅外線熱影像圖
三、重要發現 本研究以紅外線鏡頭結合智慧手機進行瓷磚缺陷辨視之可行性,由實驗室 中研究發現瓷磚表面溫度由34.5 度,以自然方式降溫,並擷取瓷磚有/無缺陷表 面溫度變化,可明顯觀察出瓷磚溫度變化。本研究於紅外線熱影像圖中觀察預埋 之瓷磚有/無缺陷差異性,但只局限於圖像。經由溫度差異分析後,初步可得下列 幾點發現: 1.降溫至 33.3 度時會產生最大溫差,約 1.54 度。與文獻所發現最適合做為代表 外牆瓷磚試體特徵值者為衰減階段初始 5 分鐘之特徵值相符。 2.降溫至 32.4 度內於預埋瓷磚缺陷可辨視 94%、瓷磚無缺陷可辨視 90%。 3.於 34.5 度降溫至室溫過程中,若瓷磚表面溫差在 1 度時,應可辨視瓷磚缺陷 86%、顯示瓷磚在高溫下降至 31.6 度時,可有效辨視瓷磚缺陷位置。 4.當溫度減少至 27 度時,瓷磚有/無缺陷範圍則較為不明顯。 本研究初步結果顯示以紅外線鏡頭結合智慧手機進行瓷磚缺陷辨視是可行 的,故將進行本研究的第二階段,智慧手機+紅外線鏡頭+無人機建置適用於國內 老舊建築之瓷磚辨識小型紅外線鏡頭結合穩定性高之無人機,期望以較低成本達 成高效率之瓷磚辨識。及第三階段本研究將以實際大樓外牆瓷磚進行驗證,以建 築物太陽照射之溫度上升階段或溫度下降時之時段,擷取瓷磚缺陷表面溫度特徵, 建置之飛行載具及紅外線可量測之擷取範圍(長、寬)、像素(所對應之實際尺寸), 將高樓之即時顯示瓷磚表面溫差之彩色分佈圖重新繪製之整合技術。 5.瓷磚有/無損傷剝落試驗結果顯示當溫度由 40 度下降至常溫 25 度時,溫度-2 度 升溫至常溫25 度尚可辨視瓷磚缺陷位置。 6.紅外線無人飛行載具熱顯像系統於飛行模式進行瓷磚缺陷檢測,由差異化處理 可分辨瓷磚缺陷脫層大致範圍。 7.本研究以中、高規格之紅外線鏡頭及無人飛行載具進行相同建築物外牆瓷磚經 由差異化分析顯像兩種系統判定外牆瓷磚與缺陷範圍大致符合,因高規格系統成 本較為昂貴且紅外線為廣角鏡頭取像邊緣會扭曲變形影響檢測範圍。
四、主要建議事項 建議一 運用手持智慧型平台進行無人飛行載具搭配紅外線鏡頭檢測外牆瓷磚缺陷 之實例操作:立即可行建議 主辦機關:中華大學非破壞檢測與安全評估中心 協辦機關:社團法人中華民國建築技術學會、台灣房屋整建產業協會、中華民國 土木技師公會全國聯合會、中華民國全國建築師公會、內政部建築研究所 本研究針對紅外線鏡頭及智慧手機結合,初步驗證以紅外線鏡頭及智慧手 機結合技術,應可具檢測外牆瓷磚缺陷的能力,因此建議賡續應用此技術及方法 整合,探討無人飛行載具搭配紅外線鏡頭檢測外牆瓷磚缺陷之實例操作。提供國 內老舊/高樓之建築物外牆瓷磚檢測時之安全性、現場檢測技術適用成程,為公 共安全及建築物維護管理所需做出貢獻。 建議二 整合無人飛行載具、紅外線鏡頭、無限傳輸與控制技術等科技,配合非圖像 比對技術,研究瓷磚材料內部損傷:中長期建議 主辦機關:中華大學非破壞檢測與安全評估中心 協辦機關:社團法人中華民國建築技術學會、台灣房屋整建產業協會、中華民國 土木技師公會全國聯合會、中華民國全國建築師公會、新竹市建管處、內政部建 築研究所 針對紅外線熱影像進行非圖像比對之技術匯整,歸納出適用於高樓建築瓷 磚材料潛在剝落位置、範圍等資訊,以即時、快速的溫度影像處理方法開發,可 降低外牆瓷磚缺陷檢測與維修經費。 研究老舊建築物瓷磚之形狀、高度、材料,以及瓷磚表面 (如顏色、染污), 表面風速等狀態,均可能影響太陽照射時建築物表面瓷磚溫度的升溫、降溫時, 實際建築物外牆瓷磚溫度影像,再透過進行統計、比對分析,才能進一步將潛在 瓷磚剝落位置範圍之變數,進行簡化及歸納,目前初步評估相關技術為可行,惟 需持續進行相關影響參數與技術之研討,俾利檢測技術成熟及普及。
建議三 以紅外線熱顯像技術結合無人飛行載具進行高層建築物外牆瓷磚損傷檢測 案例研究:長期建議 主辦機關:社團法人中華民國建築技術學會 協辦機關:勞動部勞動力發展署技能檢定中心、台灣房屋整建產業協會、中華民 國土木技師公會全國聯合會、中華民國全國建築師公會、內政部營建署 研究台灣北中南地區之老舊建築物瓷磚實務之形狀、高度、材料,以及瓷磚 表面 (如顏色、染污),在太陽照射時建築物表面瓷磚溫度的升溫、降溫時,最佳 的檢測時間,提高實際建築物外牆瓷磚溫度影像分析,擷取老舊高樓建築外牆潛 在瓷磚剝落位置及範圍。 台灣老舊高層建築物外牆瓷磚若能針對台灣都會區之實境環境現況作現場 的實際案例檢測探討並納入相關研究資料庫數據對能夠更準確提供檢測結果,未 來俟相關專業操作資格與檢定制度完備後,可考量納入老屋健檢的參考項目。
ABSTRACT
Keywords: UAV,Infrared, Tiles peeling, Nondestructive testing techniques
Taiwan is located at the earthquake and Typhoon district and the high humidity island country. The public works and civil building related to structural members is quite harsh. The engineering structures such as bridges, buildings, storage tanks, underground pipelines are already getting into aging. Therefore, how to inspect the deterioration or aging structural members with the development Architectural Structure Nondestructive Inspection in UAV-Infrared will be the most potential equipment to inspect the peeling off tiles in the high rise building. As The UAV technology matures, in a modern, this project will utilize the nondestructive testing techniques, including UAV, Infrared, digital Differentiation image process to establish core technology UAV and Infrared cooperated with the aged building tiles peeling off the image determining to increase industry-academia interaction. This invention also enhances participation of the industries and the technical capabilities. At the same time, the establishment of development Architectural Structure damage Nondestructive Inspection in UAV and Infrared continue to meet the need of industry players.
第一章 緒論
第一節
研究緣起與背景
目前台灣鋼筋混凝土大約超過三分之二之建築結構已使用超過 30 年以上, 隨著使用年限增加以及各種不同的載重、外力作用與上述自然天災環境影響,皆 會使人們居住的建築房屋結構老劣化,引發結構內外部之危險因子,如老舊建築 之瓷磚剝落。目前高樓層之外牆瓷磚損傷剝落辨視或檢測,都必需籍由垂吊或搭 架方式進行辨視檢測,而紅外線檢測方式處於輔助前者進行判定,在實務中還無 法準確評估高樓層之瓷磚損傷狀態,且近年來國內老舊建築瓷磚剝落事件頻率過 高、甚至造成人員傷亡,故各縣市單位主管機關之行政管理措施或公權力之行使 僅是預防之手段,並無法促使建築物之劣化趨於和緩或重新提升建築物機能。而 在近年來,科技、資訊及無線傳輸快速發展,透過跨領域技術整合,如無人載具、 紅外線鏡頭、無線傳輸與控制技術結合,進行非圖像比對外之創新判讀方法,將 可提昇診斷瓷磚材料內損傷所需資訊,必能節省大量的檢測與維修經費。在永續 發展之原則,不論是管理維護計畫、長期修繕或是持續管理維護之概念,都值得 本研究成果進一步於建築管理或公寓大廈管理法令中予以落實及定期檢測維護, 降底瓷磚剝落之公共安全之建築物。 國內老舊建築超過30 年約有 88 萬棟,且內外牆面仍以水泥砂漿粉光及貼飾 瓷磚為主。但是,台灣地處亞熱帶為海島型氣候,溫度、濕度的差異加上頻繁的 自然災害,導致瓷磚與牆面結構體介面有空洞的狀況。近年來,瓷磚剝落砸傷民 眾事件頻傳。傳統的檢測方法以垂吊法、目視法、打診法為主,都必須藉由垂吊 或搭塔方式進行,效率低且成本較高。因此本研究將以無人飛行載具搭載紅外線 熱像儀,發展準確、高效之外牆瓷磚檢測方法。此方法不僅能夠降低人員垂吊風 險,亦可減少檢測成本。同時,透過飛行載具進行水平觀測,可改善傳統紅外線 檢測高層大樓之測量誤差,以提高老舊建築外牆瓷磚損傷辨視率,並建立本方法 檢測技術手冊及修護對策。第二節
研究目的與重要性
在國內外採用紅外線方法於老舊建築物量化判定外牆瓷磚可能損傷剝落位 置及範圍之研究較少,且對於高樓層之外牆瓷磚損傷剝落辨視或檢測,都必需籍 由垂吊或搭架方式進行辨視檢測,並有鑒於紅外線熱顯技術結合無人飛行載具 (UAV)應用領域甚廣。因此,國內許多老舊建築大多超過 4 樓層以上之高度,如 何建立實際可行且可量化及可靠度高的辨視檢測技術,應為重要議題。目前無人 機於高空拍照攝影取像已趨成成熟,因無人機空拍都採用六軸陀螺儀懸停,如同 在地面靜止不動拍攝影像,亦不受巷道之影響,本研究將以無人機空拍攝影取像, 並開發遙控紅外線技術進行高層建築物外牆瓷磚剝落損傷定量非破壞性檢測,將 檢測擷取數據上傳雲端進行瓷磚剝落損傷診評估,建立量化可靠度高、成本較低 及全面性高層建築物外牆瓷磚損傷檢測方法。 國內超過30 年以上之老舊建築約 88 萬棟,瓷磚剝落潛在問題將日以遽增。 然而,目前針對建築外部瓷磚損傷(黏著度不足)的相關研究,實務上都是以敲擊 瓷磚表面配合目視檢測來判定瓷磚黏著程度,再配合紅外線技術以瓷磚表面溫度 差異辨視或統計特徵差異,進行瓷竱黏著不足之損傷判定;但因紅外線檢測與辨 視技術的限制,常會受紅外線儀器角度及檢測時溫度差或現地環境(晴、雨天等) 中之各種不確定因素之影響,而造成判定上誤差。為有效降低或預防外牆剝落, 間接維護人民生活安全居住環境,則需要建置定期檢測、預防及維護之管理對策。 在所有條件中,如何快速辨識瓷磚剝落位置、範圍則是最重要部分,故本研究將 以無人機空拍攝影取像,並開發遙控紅外線技術進行高層建築物外牆瓷磚剝落損 傷定量非破壞性檢測,將檢測擷取數據上傳雲端進行瓷磚剝落損傷診評估,建立 量化可靠度高、成本較低及全面性高層建築物外牆瓷磚損傷檢測方法。第三節
研究方法、內容與步驟
壹、研究方法與內容 本研究分為三大階段,首先製作有/無缺陷之瓷磚牆試體標準組,並模擬不 同溫度之溫度差異之紅外線鏡頭之熱感應能力;進行損傷瓷磚紅外線檢測剝落位 置、範圍等基本辨識率,並測試不同量測距離(2m、3m、4m、5m)之實際顯像範 圍。 無損傷之瓷磚試體量測 損傷之瓷磚試體量測 一般紅外線顯示瓷磚表面溫差之彩色分佈圖,如下圖所示。 損傷瓷磚 紅外線熱影像圖 故本研究第一階段建立靜態時以小型紅外線鏡頭之溫度分析方法,提高瓷磚 損傷非圖像定性判讀方法,明確分析損傷之位置及範圍。在第一部分所採用小型 紅外線鏡頭(熱感應鏡頭),可支援手機 iOS 及 Android 版本;首先測試紅外線鏡頭 之穩定性,暸解其硬體之系統誤差後,再進行有無缺陷之瓷磚牆試體標準組,並 模擬夏天、冬天之溫度差異之紅外線鏡頭之熱感應能力測試,建立相對應之瓷磚 損傷分析模式。 不同量測距離(2m~5m) 不同量測距離(2m~5m)第二階段將小型紅外線鏡頭與無人飛行載具結合如下圖所示,製作無人機起 降時之停機模具,再以4G 無線傳輸進行遠端控制載具上之小型紅外線鏡頭 APP 介面,進行高樓瓷磚檢測,進行飛行載具及紅外線整合後之紅外線鏡頭之穩定性、 測試不同量測距離(2m、3m、4m、5m)之實際顯像範圍。 小型紅外線鏡頭APP 介面結合手機 (4G 無傳輸) 無人飛行載具與停機模具 第三階段建置建置之飛行載具及紅外線可量測之擷取範圍(長、寬)、像素(所 對應之實際尺寸),將高樓之即時顯示瓷磚表面溫差之彩色分佈圖重新繪製之整 合技術,但目前無明確統一之瓷磚損傷判定準則及損傷範圍評估,如下圖所示。 損傷瓷磚 紅外線熱影像圖
貳、研究流程如下所述: 在近年來,科技、資訊及無線傳輸快速發展,透過跨領域技術整合,如無人 載具、紅外線鏡頭、無線傳輸與控制技術結合,進行非圖像比對外之創新判讀方 法,將可提昇診斷瓷磚材料內損傷所需資訊,必能節省大量的檢測與維修經費。 本研究將以無人機空拍攝影取像,並開發遙控紅外線技術進行高層建築物外牆瓷 磚剝落損傷定量非破壞性檢測,將檢測擷取數據上傳雲端進行瓷磚剝落損傷診評 估,建立量化可靠度高、成本較低及全面性高層建築物外牆瓷磚損傷檢測方法。 本研究流程,如圖1-1 所示。 圖1-1 研究流程圖 (資料來源:本研究彙整) 國內外文獻收集 紅外線原理 差異化影像合成 處理 實驗試體製作與 設計 固定 瓷磚缺陷辨識 UAV 瓷磚損傷 辨識 表面溫度特徵分析 實際案例驗證大 樓外牆瓷磚損傷 檢測 瓷磚缺陷影像套 疊合成處理
第二章 文獻回顧
第一節
紅外線相關文獻
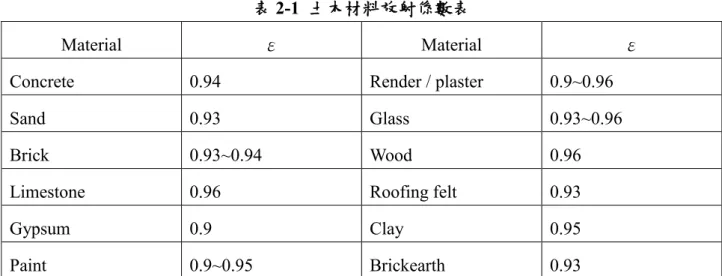
壹、紅外線發展沿革 紅外線於1800 年英國天文學家 William Herschel 使用三稜鏡分光作用探討光譜的熱效應 時,最先發現紅外線(Infrared)。事隔百年 1905 年 Coblentz 印出最早的紅外線分子譜圖集 及1917 年 Case 以硫化亞鉈(T12S)製成光電導電器來測量光之波長,此為紅外線熱像偵測 器之開端。在第二次世界大戰,紅外線的實用技術更有了長足的進展,在這段期間最可稱道 的成就之一,就是「光學影像轉換器」的發展,用紅外線照射於物體而顯其形像於螢光幕上, 因此被用於夜間作戰中。為日後紅外線於軍事中應用更加普遍,如熱追蹤飛彈、自動導航與 飛行等。在1948 年,紅外線攝溫影像術(Infrared Thermograph,IT)開始應用於醫學,最早用 於乳房、血管和皮膚方面的病變檢查。紅外線攝溫儀經研發改善後,已能提供高解晰度之影 像且具備高準確度之測溫。操作簡單、安全方便,資料可儲存供研究、分析及追蹤治療,IT 可用於全身各部位體表溫度之測量,對臨床診斷幫助頗大。近年來由於紅外線技術的突破及 成本的降低,以及紅外線熱影像儀器的開發能有效地用於熱分佈檢測及測溫,因此紅外線檢 測被廣泛使用於醫學、工業、土木、航太及軍事等領域上【1-6】。 貳、國內外紅外線熱影像檢驗瓷磚相關文獻 目前國內、外專家學者目前針對建築物瓷磚紅外線熱影像檢測技術,有許多不同理論及 原則根據,並且依據檢測的影響因素,產生許多不同的資料。這些因素來自時間、角度、方 向、距離、風速、環境等,都必須依據分析加以解釋這些相關檢測的數據。 在國內應用紅外線熱影像儀檢測瓷磚缺陷、材料老化等相關研究如下所述: 林谷陶(2010)應用用紅外線熱影像於水泥砂漿材料特性進行研究【7】,以一般牆面或樓板 常用來打底粉平使用之水泥砂漿 試體進行溫度加速劣化,再以經劣化後、未劣化之水泥砂漿 試 體分別進行強度試驗、孔隙試驗、氯離子滲透試驗,及試體加 熱後之紅外線熱像檢測分 析。本文提及紅外熱影像的主要應用是在於土木部門的構造熱影像,應用於建築產業大部分 材料的放射係數介於0.90~0.96 之間。其土木材料放射係數表,如表 2-1 所示。表2-1 土木材料放射係數表
Material ε Material ε
Concrete 0.94 Render / plaster 0.9~0.96 Sand 0.93 Glass 0.93~0.96 Brick 0.93~0.94 Wood 0.96 Limestone 0.96 Roofing felt 0.93
Gypsum 0.9 Clay 0.95
Paint 0.9~0.95 Brickearth 0.93
本篇學者Tsung-Lin Lee 提出一個應用人工類神經網絡(ANN)結合熱影像分析估算海堤內 部侵蝕洞穴深度的方法。該研究建立了一個模型試驗沙箱,主要利用熱影像設備檢測結構表 面測量內部狀況的溫度變化,其結果如下所述。 一、模型沙箱實驗 本分析案例之模型沙箱實驗係於台南立德大學營建實驗室中進行。沙箱尺寸長 2m,寬 1m,高 1m。沙箱上部在鋪設 5cm 厚 混凝土板,以模擬現場護岸的狀態,如圖 2-1 所示。 圖2-1 砂箱實驗與紅外線熱影像記錄 資料來源:Ocean Engineering36(2009)1251–1257 二、海堤現場檢測 本分析範例進行了台南青草海堤的紅外線熱影像調查,青草海堤的位置中可以看到向海 方向的海堤表面有一道長裂縫,由侵蝕洞穴部的崩塌熱影像圖中,可以看到對應於現有沿裂 縫的高溫線,如圖2-2 所示。
圖2-2 海堤裂縫深度測量
資料來源:Ocean Engineering36(2009)1251–1257
學者江支弘(2004)應用紅外線熱影像與打診法檢驗面磚黏貼是否穩固,文中紅外線攝溫影像 術(Infrared Thermography, IRT)檢測瓷磚黏貼完整性,使用紅外線熱影像儀拍攝瓷磚表面溫 度熱影像圖(Infrared images),觀察溫度分佈差異處而找出黏貼不完整的範圍及位置,其判斷 結果準確且快速,且可現場檢測較大範圍之瓷磚。比對打診法與紅外線攝溫影像術之結果顯 示,打診法較易流於主觀黏貼不完整處之位置及範圍,尤其黏貼不完整範圍較小處的判斷甚 為困難。比較之下,紅外線熱影像圖能清楚且具體呈現大範圍及小範圍之黏貼不完整處的範 圍及位置,使檢測人員易於判讀,並提供判斷之準則及論證,準確性優於打診法,未來如推 廣使用紅外線攝溫影像術檢測新建工程之瓷磚施工品質,或評估使用中建築物之瓷磚現況, 作為為修補強之依據,應可促進建築物外牆之完整保持,並達到建築物公共安全的要求【8,9】, 以鹵素燈加熱配合紅外線熱影像拍攝牆上面瓷磚的溫度,其加熱後面磚黏貼不完整處將呈現 相對高溫的現象,藉由熱影像圖的不同溫度區判釋面磚黏貼性,如圖2-3 所示。 (a)檢測牆面之紅外線熱影像圖 (b)檢測牆面瓷磚黏貼不完整處 (紅色表熱影像圖顯示之位置,藍色表打診法之結果,粉紅色表兩方法相符處)
學者江支弘(2005)本研究以紅外線熱影像法( InfraredThermography, IRT)、敲擊回音 (Impact-Echo Method)及打診法(HammerTapping)等三種檢測方法進行瓷磚黏貼品質檢測, 並比較三者之間的檢測結果,期望提昇以非破壞技術評估瓷磚施工品質的可靠性與實用性。 三種方法中以紅外線熱影像法較可快速及大範圍檢測瓷磚缺陷;而敲擊回音法雖可檢測出瓷 磚缺陷,但須有正確之參數才能準確預估缺陷範圍;打診法雖不能估計瓷磚缺陷範圍,但本 法使用之器具較為簡便,可用錢幣及鐵鎚等即可做檢測。運用紅外線熱影像檢測方法進行瓷 磚黏貼品質檢測,其檢測結果以紅外線熱影像可快速及大範圍檢測瓷磚缺陷,並提出紅外線 熱影像拍攝角度在45 度以內,所估算出知識體面積與實際面積誤差皆低於 10%,如圖 2-4 所 示。 (a)牆面加熱 7 分鐘後之紅外線熱影像圖 (b)牆面瓷磚設計黏貼不完整處 圖2-4 瓷磚黏貼品質檢測 (資料來源:江支弘、林宏義(2005),建築物外飾材施工品質之非破壞檢測,朝陽科技大學營 建工程系碩士班,碩士論文) 李德河(2008) 本研究擬針對建築物之表面裂縫、內部裂縫、外飾面磚脫層等現象以非破 壞檢測技術檢測之,比較透地雷達、紅外線熱影像儀及超音波檢測儀三種檢測方式對於檢測 不同缺陷的適用性及可行性【10】。本研究之研究成果如下: 1. 利用透地雷達對表面細微裂縫進行探測時,可得知裂縫位置,由紅外線熱影像儀及超音波 檢測儀檢測結果,可以本研究所得之關係式來預測裂縫深度。 2. 以透地雷達進行建築物外部缺陷探測時,以高頻率之天線可探測得外飾面磚脫層及磚牆破 壞範圍,利用紅外線熱影像儀檢測時,可運用影像處理技術獲得外飾面磚脫層及磚牆破壞範 圍,但須注意檢測環境之日曬條件,而超音波檢測儀則因待測物之表面粗糙度而影響其可行 性。
3. 本研究將紅外線熱影像技術應用於成功大學博物館北向立面進行大面積之檢測,並將紅外 線熱影像檢測結果與敲擊法結果相互比對,其外飾面磚脫層範圍結果相近。 運用紅外線熱影像於建築物外飾面磚脫層範圍進行檢測,可由影像相減技術及相對溫度 差異判定其位置,亦可使用溫度累積法進行孔洞分佈位置分析,並建立其檢測及分析流程, 而為避免陽光不均勻日曬之影響,故檢測時段應採清晨時段較佳,且對一房屋結構進行檢測 時,牆面與柱樑系統應分開判斷,以紅外線熱影像儀對室外建築物缺陷檢測時,可選定白天 或夜晚之溫差穩定時段進行拍攝,如此可避免溫差變化大所造成的結果誤判。 文中文獻學者 Moroprulou et al.運用紅外線熱影像技術對希臘雅典國際機場 瀝青鋪面進 行缺陷檢測,缺陷定義與 ASTM D4788 一致,其定義為”缺陷面積與完整面積鋪面溫差至少 0.5℃,視為缺陷(脫層現象)”。檢測範圍分為機場內最老的碎石鋪面、飛機滑行道及主要跑道 等三部份,以機場內 最老的鋪面檢測為例,熱影像圖上呈現”熱”的區域且溫差大於 0.5℃, 現 地存有脫層之痕跡,其脫層面積佔 27%,如圖 2-5 所示。 圖2-5 機場鋪面檢測結果(取自 Moroprulou et al.,2001) 文中文獻林維明(1997)運用紅外線熱影像對海砂屋之劣化現象進行檢測,作者提出海砂 屋是鋼筋混凝土結構體摻有海砂,而海砂中含有過量的氯化物,導致鋼筋發生腐蝕生鏽、體 積膨脹,導致結構體破壞。當一般建築物外壁在白天受到日照時,外壁的溫度會高於內壁, 而造成熱流自外壁向內壁流動,致內、外壁有溫度差異,因此產生溫度梯度,若結 構體內有 剝離之部份,終形成很薄且無法傳熱的空氣層,顯示在一定日照量下,剝離部位之表面溫度
(a) 建物外壁診斷之概念圖 (b) 建物外壁之溫度變化範例 圖2-6 建物外壁診斷及溫度變化圖例 文中文獻學者Vavilov et al.(2002)運用紅外線熱影像對俄羅斯內的煙囪作安全性的評估, 蘇聯早期發展工業興建許多煙囪,許多煙囪至今早已超過使用年限,主要利用溫差的方式檢 驗煙囪是否安全,因為煙囪加熱後,熱由內往外跑,所以內部會比外部高溫,故從外部拍攝 熱影像時,完好的煙囪在加熱後溫差會呈現正值,含有裂縫處則是呈現較緩的溫差,如圖 2-7 所示。 圖2-7 完整與裂縫煙囪之溫差比較(左:完整;右:含裂縫) 文中文獻學者 Maierhofer et al.(2003)運用透地雷達及紅外線熱影像技術對一內有孔洞之 混凝土塊進行檢測,其中孔洞之模擬材料為四個20×20×10 cm3及4 個 10× 10×10 cm3之聚苯 乙烯(保麗龍)塊,混凝土塊尺寸為 1.5× 1.5× 0.5 m3,並以 3 盏 2400W 之加熱器對混凝 土塊 進行主動式的加溫,再於降溫過程中進行監測,並以 2 張/秒之頻率 拍攝熱影像圖;而後以 1.5GHz 之透地雷達天線進行探測,欲探討此兩項技術在檢測混凝土孔洞的效果,
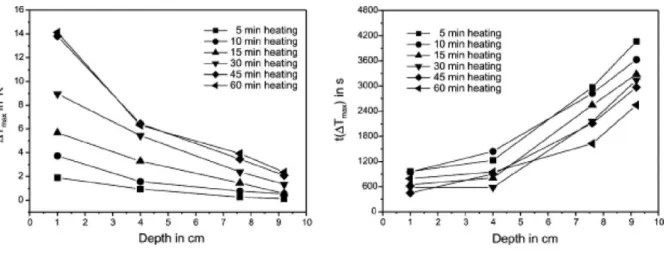
如圖2-8 所示。 (a)透地雷達 Z 方向不同深度剖面圖 圖中a:深度 0.6 公分;b:深度 6.0 公分;c:深度 9.6 公分 (b)紅外線熱影像圖(加熱時間為 10 分鐘) 圖中a:降溫 9 分鐘;b:降溫 58 分鐘 圖2-8 兩種技術 GPR 與 IR 在檢測混凝土孔洞的效果 其研究結果發現: (1) 透地雷達和紅外線熱影像是相當適合用來檢測混凝土孔洞的非破壞性檢測工具。 (2) 利用透地雷達可以判斷孔洞是否傾斜或平行表面,亦可用於探測孔洞的深度。 (3) 利用紅外線熱影像檢測時,深度約略 10 公分之孔洞在加熱 5 分鐘後亦可察覺,採此法可 有效率地檢測孔洞位置,如圖2-9 所示。
圖2-9 最大溫差和孔洞深度關係圖 學者李德河、連韋慶,針對透地雷達與紅外線非破壞技術檢測,並以堤防掏空為例,顯 示透地雷達針對掏空缺陷時會有強反射行為,在紅外線熱影像圖上會有不同顏色顯示,代表 可能掏空的區域,如圖2-10 所示。 (a)透地雷達 2D 剖面圖像 (b)紅外線熱影像圖 圖2-10 透地雷達與紅外線檢測成效 該研究指出混凝土表面缺陷列出各檢測技術之適用性及優缺點,如表 2-2 所示,文獻指 出超音波、透地雷達與紅外線檢測時,有一共通缺點,為定量上並無唯一標準,如完整區與 掏空區溫度不同等,但僅能對類似案例建立定性檢測標準。
表2-2 混凝土表面缺陷非破壞檢測技術之優缺點 方法 優點 缺點 透地雷達 以拖曳方式進行檢測, 結果較為連續性 細微裂縫等缺陷受解析 度所限制 紅外線 非接觸式、檢測面積 大、攜帶方便、即時檢 測 溫差變化小的環境須使 待測物產生溫度變化、 僅量測到表面輻射溫度 超音波 操作容易、對表面垂直 裂縫深度之量測有良好 結果 表面下之缺陷無法直接 量得、準確度受表面粗 糙度限制 (資料來源:李德河、連韋慶,「非破壞檢測技術於建築物缺陷檢測之應用研究」,成功大學 土木工程學系碩博士班,2008) 天野勳、山川和夫、伊藤秀和(2009)提出利用紅外線影像檢測外牆脫層部位時,觀察的重 點在於瓷磚表面溫度的時間變化在脫層部位與健全部位間的差異【11】。建築物外牆的黏結層 一旦與瓷磚剝離,在剝離部位背面就會產生空氣層,密閉空間中的空氣層具有相當強的絕熱 效果,在此一部位上,空氣層的外牆表面與內部建築體間的熱傳導效果將會變弱。因此,當 日光直射,外界氣溫上升等狀況發生而造成外牆表面溫度提高時,因為外牆結構中有這樣的 空氣層存在,熱量就難以傳達到牆面內層,因而使脫層部位的溫度比健全部位的溫度來得高。 相對地,當牆面所受到的日曬減少或外界氣溫下降等因素造成外牆表面溫度降低時,由於具 有空氣層的部位遮蔽了建築體的傳熱途徑,所以脫層部位的溫度就會比健全部位的溫度來得 低,且以紅外線進行拍攝時建議拍攝的仰角應控制在 45°以內,水平傾角宜控制在 30°以內, 如圖2-11 所示。
文中也對紅外線及打診法相關參數特徵比較,如表2-3 所示。 表2-3 紅外線及打診法相關參數特徵比較 項目 紅外線 打診法 精度 ○溫差 ○經驗 成本 ○低 ×高 設備 ○ 特殊な場合は 高所作業車要 × 作業足場要 作業效率 ○高 ×低 工期 ○快 ×慢 氣象條件 ×有,受雨天影響 ○無 安全性 ○高 ×低,需施工架 建築的影響 ○ 非接触 ×有危險性、需表面處理 居住者的影響 ○無 ×振動、噪音 記錄 ○電子資料 ×手抄記錄 文中也對紅外線檢測時之對策建議,如表2-4 所示。 表2-4 紅外線檢測時之對策建議 種類 對策 室內暖房 暖房開始前撮影 非連續部分 夜間撮影 壁面凹凸 夜間撮影 光面瓷磚 夜間撮影,二時刻間差分処理 混合顏色 夜間撮影 壁面污染 夜間撮影,二時刻間差分処理 壁面濕潤 撮影不適 天空反射 夜間撮影 地面眩光 夜間撮影
壁面反射 夜間,曇天時撮影 文中也對紅外線檢測流程及現地檢測建議,如圖2-12 所示。 (a) 紅外線檢測流程 (b) 紅外線現地檢測建議 圖2-12 紅外線檢測流程及現地檢測建議 (資料來源:天野勳、山川和夫、伊藤秀和等(2009.2.),《特殊建築物の外壁診断之におけゐ 赤外線調查ガイドライン》,建設の施工企画(日本) 林谷陶(2011) 於一般外牆瓷磚應用紅外線熱影像之非破壞性檢測技術,主要是檢測面層 瓷磚、黏結層與底層混凝土間之脫層現象。因為脫層現象產生之空氣層,使外牆正常與缺陷 區域在日曬後產生溫度差異,本研究在於運用實驗設計方法,規劃外牆瓷磚使用不同黏結材 料,在不同黏置時間及不同位置條件下,應用具有遠距、非接觸及一次全面檢測優勢之紅外 線熱影像非破壞性技術,探討瓷磚黏結系統脫層、及未脫層現象之檢測特徵分析。研究發現 外牆瓷磚系統,實驗室中以紅外線加熱燈箱加熱 2 分鐘後,於紅外線熱影像圖中即可觀察出
(即與健全部位有最大溫度差)預埋之脫層缺陷點位置。溫度最高點附近及之後的溫度衰減階 段則無法觀察出脫層缺陷點位置。藉由迴歸分析及變異數分析,發現最適合做為代表外牆瓷 系統試體特徵值者為衰減階段初始 5 分鐘之擬合方程式特徵值,最具識別黏結材料、黏置時 間及試體位置的規則性。,未來實際進行建築物外牆瓷磚系統之非破壞性檢測時,若欲偵測 脫層缺陷,最好選擇建築物早上受太陽照射之溫度上升階段;而若要鑑別不同黏結材料、不 同黏置時間等外牆瓷磚系統的表面溫度特徵,可以溫度衰減階段初始 5 分鐘之擬合方程式特 徵值 m 為比較依據。運用紅外線熱影像非破壞性檢測外牆瓷磚表面溫度特性,應用於瓷磚黏 結性能變化之關聯研究,透過模擬製作之外牆瓷磚系統試體予以不同黏結材料、黏置時間及 牆面高度位置後,以紅外線熱影像檢測技術印證檢測技術非接觸式的檢測材料性能變化的可 行性,並發現欲偵測脫層缺陷,最好選擇建築物早上受太陽照射之溫度上升階段。【12,13】 文中文獻學者高蔡義,瞭解外牆面磚的基本性質、 施工方式、劣化原因、劣化現象及 診斷方法,進而研 擬出劣化調查作業計劃,再透過案例的現況調查與分 析,來探討劣化發 生的現象與原因,最後研擬出各種 缺失的因應對策。本研究成果歸納如下: 一、研究發現導致外牆面磚劣化以(1)設計因素、(2) 施工因素及(3)使用管理因素等三大 人為的環境 所產生的劣化較為顯著。 二、建築物外牆面磚劣化位置調查分析發現: 建築物污損劣化部份,以窗台下方污損(佔 42%) 所佔的比例最高,而金屬附加物銹水污損(佔 24%)次 之,再其次為排水污損(佔 18%); 白華劣化部分,以 屋頂女兒牆下方白華(佔 23%)所佔的比例最高,而樓 版交界處白華(佔 21 %)次之,再其次為排水孔下方白 華(佔 18%);建築物龜裂劣化部分,以大面積未開口 牆面 龜裂(佔 35%)及開口部周邊龜裂(佔 35%)所佔的 比例最高;就建築物鼓脹而言,以樓版交界 處鼓脹(佔 45%)所佔比例最高,而開口部周邊(佔 33%)次之。另 外,建築物剝落劣化而言, 以樓版交界處(佔 35%)所 佔比例最高,而開口角落部(佔 30%)次之。 三、劣化原因與對策部分: 建築物外牆面磚劣化以人為環境因素所影響的層 面較自然 環境因素來的直接,乃針對設計面、施工面 及使用管理維護面等三個人為環境層次研擬改 善對 策。
文中文獻學者戴佩宜建立足尺之RC 牆構造,以不同黏貼方式設置不 同之外牆瓷磚,再 應用打音法進行瓷磚黏著情況檢測,把打音法所測得出之聲音透過快速傅立葉轉換將 聲音頻 率數值化與圖像化後進行分析,最後再與瓷磚拉拔實驗比較其聲音頻率值(Hz)與黏著強度 (N/mm)之間的關係。實驗結果可得知瓷磚黏貼缺陷處之空洞聲音頻率較高,而黏貼完整處之 聲音頻率較低(厚實聲);瓷磚黏貼缺陷處之黏著強度較小,而黏貼完整處之黏著強度較大。由 此可知,打音法所檢測出之頻率值越低,其黏著強度越大。此外,不同黏貼缺陷造成之打音 結果及黏著強度亦有不同之關聯性。依據文獻分析的牆面磁瓷磚診斷方法的適用性,如表 2-5 所示。 表2-5 牆面瓷磚診斷方法的適用性 目測法 1.可發現外觀上的異常,但無法發現外觀上有無異常浮起。 2.雖可發現外觀上的異常,但有可能因光線或遮蔽物而漏 掉。 打診法 1.無法以客觀的數字來表示其測定的結果。 2.有時無法測出厚度約 40mm 以上的部位之浮起。 紅 外 線 熱 影像法 1.儀器會受季節、天候、時間、氣溫、牆面的方位、距離、 裝修材料的色調、 建築物冷暖機具發熱等影響。 2.在強風或強雨時難以測定。 3.若牆面與儀器間 有樹木等障礙物時,無法測定。 4.不同儀器機型畫面處理方法會造成結果有很 大的差異。 5.若有陽台或雨庇等突起物時,難以測定。 反應法 1.有時無法測出厚度約 40mm 以上部位的突起。 2.調查牆面的後測狀況不同 時,可能會造成誤診。 3.採用機器人時,有時無法探知窗戶周圍與凹凸部的周 邊。 4.採用機器人時,可適用高度有所限制。 5.採用機器人時,可能會因為風 等因素產生測定的誤差。 超音波法 1.對於較寬廣的面,難以檢查出浮起。 2.不適用於表面粗糙的瓷磚。 3.難以檢 查出較深層處的浮起。 黏 著 強 度 試 驗 1.試驗用瓷磚需要進行修補。 2.不適用於表面有較大凹凸的瓷磚。 3.僅能測定 部份的瓷磚。 (測定數目受限制) 。
文中文獻學者盧珽瑞蒐集文獻,彙整出台灣地區外牆瓷磚的損壞,可 分為因地震等非常 時期所發生的損壞及平常期間所發 生的損壞兩類;日常損傷於施工後短期間內發生的比 例 較高,主要因施工不良及設計不良所造成;其他有材料或黏著層發生劣化所造成的破壞。外 牆瓷磚的 損壞的種類可分為污損、白華、龜裂、剝離、鼓脹、 剝落等數種。研究調查顯示: 國內 15 層以上高層集合住宅外牆 使用瓷磚裝修相當普遍(占 89﹪) ;其中使用 10 年以 上有瓷磚剝落、剝離或破裂者 1 棟,占總數 12.5﹪; 使用 20 年以上有瓷磚剝落、剝離或 破裂者 8 棟,占 總數 67﹪;使用 30 年以上有瓷磚剝落、剝離或破裂者 3 棟,占總數 75 ﹪。 以專家訪談方式獲得外牆瓷磚最主要剝落的原因 包括下列幾項:1.瓷磚有無燕尾背溝, 2.粘著劑品質, 3.張貼工法及黏結層厚度有無配合瓷磚種類設計,4. 工地之施工品質。如表 2-6 所示。 表2-6 外牆瓷磚剝落原因與防止對策 瑕疵發 生位置 主要發生原因 瑕疵狀況 對策 結構體 鋼筋腐蝕 因結構體鋼筋腐蝕 造成混凝土 施工時確保鋼筋保護 層的厚度 確保混凝土含氯量在 標準範圍內 結構體/ 水泥砂 漿粉刷 層 施工精度不佳 水泥砂漿粉刷層厚 度過厚,造成瓷磚 剝落 提高施工精度,避免 造成粉刷層過厚 進行水泥砂漿粉刷, 應先清潔結構體表 面,並且充分加以潤 濕 水泥砂漿粉刷層與 結構體的界面產生 剝離,造成瓷磚剝 落 提高施工精度,避免 造成粉刷層過厚。 無法避免粉刷層過 厚,應先打錨或鋪設
鋼筋網後,再進行粉 刷。 結構體表面強度不 佳,造成瓷磚剝落 進行水泥砂漿粉刷 時,應先進行結構體 潤濕。 水泥砂漿粉刷完成 後,應進行養生,避 免因過度日照與通 風,造成粉刷層產生 乾裂現象 水泥砂 漿粉刷 層/水泥 砂漿黏 著層 水泥砂漿粉刷層表面狀 態不良 粉刷層產生白華, 造成瓷磚剝落 施工時要確認水泥砂 漿粉刷層有無產生白 華的脆弱面 粉刷層表面過於平 滑,造成瓷磚剝落 粉刷層表面應粉刷成 粗糙面。 水泥砂漿粉刷層應採 貧配比 (林谷陶,紅外線熱影像法於外牆瓷磚表面溫度檢測特性之實驗研究,內政部建築研究所, 自行研究報告)
學者李隆盛(2012)研究成果指出紅外線熱影像儀可作非接觸及全面式偵測,不會影響或 破壞建築物現有功能,且可快速取得建築物大面積之熱影像進行判釋【14】。建築物由多種構 材組成,因材料的性質 不同,不同檢測時間點的溫度變化情形常有明 顯的差異。因此,對 同一建築物應於不同天候 條件及時間點進行常態性偵測,以利進行比較分析及判釋,如圖 2-13 所示。 (a)外牆瓷磚翹曲的紅外線熱影像照片 (b)屋頂防水層滲漏紅外線熱影像照片 圖2-13 紅外線表面缺陷顯像圖 並以營管大樓外牆檢測結果顯示,檢測範圍溫度介於28.59 ° C~35.84 ° C,平均溫度為 30.42° C;約在三樓樓地板位置的外牆面出現局部明顯的溫度差別,如圖 2-14 所示。 (a)營管大樓入口外牆可見光照片 (b)營管大樓入口外牆熱影像照片 圖2-14 營管大樓外牆瓷磚溫度差別 運用紅外線顯像儀進行外牆瓷磚之檢測,透過相異的溫度圖徵,顯示由紅外線熱影像圖 的分析、判釋,可找出建築物瓷磚之問題部位,其紅外線熱影像儀檢測的方便性及其檢測時 應注意環境條件與建築物現況,並常態性的檢測與相關資料的蒐集整理分析。 (資料來源:李隆盛(2015), 「紅外線顯像儀應用於建築物維護檢測之探討」,土木技師期刊 第69 期)
學者黃怡碩(2012)以熱傳遞(Heat transfer)瀝青混凝土是由瀝青材料與顆粒混合在一起 的道路鋪面,以一定比例加熱至適當溫度,均勻拌合混合而成。目前台灣地區道路鋪設與維 護採用的主要材料為熱拌瀝青混凝土 (Hot Mix Asphalt, 簡稱為 HMA),而本研究是利用紅外 線熱影像儀器對瀝青混凝土做溫度觀測實驗,並利用層集多重分類法進行分析。實驗以紅外 線熱像儀架設於觀測鋪面距離中心約 5~8 公尺處,儀 器架設完成之後便開始觀測每秒之鋪 面溫度變化,並記錄每分鐘之環境溫度;經由實驗結果顯示,熱影像在經過層集多重分類法後, 能有效將溫度性質相近的像元隔成區塊,獲得溫度區塊邊界,進行數據分析;而從所獲得之 溫度區塊邊界可以讓觀察人員有客觀的數據可以判斷其部分區域的溫度變化情況,能夠了解 此區域是否有材料不均勻之問題【15】。本研究所使用的軟體為 2009A「MATLAB」統計軟體 程式設計軟體。 黃怡碩(2012),利用紅外線熱影像儀技術檢測路面瀝青混凝土溫度變化 之先導研究-使用層集 多重分類法,朝陽科技大學營建工程系,碩士論文
第二節 影像合成之相關文獻
學者李岩山、謝維信、裴繼紅(2011),實驗圖像為由無人駕駛飛機自動拍攝的視頻序列 圖 像,該視頻序列中,飛機有明顯的擺動,拍攝高度不 變,視頻幀率為每秒巧幀,每幀圖像大小 為480*640 實驗方法為從視頻序列中每隔 10 幀抽取 1 幀用於拼接,從 25 0 幀中共選取 25 用於實驗,初始航拍圖像方向角θ 為 60 度,初始重合中心點為圖像的中心點,提出了航拍序 列圖像拼接方法的約束性條件, 及一種快速的無人機航拍序列圖像的自動拼接方法。運用自 回歸模型, 將歷史相交區域中心點作為模型的輸人資料,對當前用於拼接的重合區域進行預測, 然後在預測區域內進行 SIFT 特徵提取和特徵提純,並根據提純後的特徵進行快速的序列圖像 拼接。通過在無人駕駛飛機航拍序列圖像上對該方法性能進行實驗實驗結果表明該方法可以 有效地提高拼接速度,解決拼接錯位問題【16】。 李岩山、谢维信、裴继红,「一種快速的基于SIFT 算法的無人機航拍序列圖像自動拼接方 法」,信號處理,第27 卷,第 9 期 學者何敬,李永樹,魯恒(2011)在分析了無人機影像拼接主要誤差來源之後,較深入地研 究了影像重疊度及誤差累積問題。確定了無人機影像拼接的最佳重疊度,並依據最佳重疊度 對原始影像進行“抽稀”處理。研究結果表明,根據最佳重疊度對原始影像進行“抽稀”能減少 參與拼接的影像數量,對“抽稀”後的影像採用分塊拼接方法能夠有效地減小拼接誤差、改善 影像拼接視覺效果,同時在一定程度上提高了影像處理效率【17】。由曲線1可以看出當重疊 度達 到一定值時,再增加重疊度進行拼接其誤差降低已不十 分明顯,而提取特徵點的耗時 卻在不斷上升。綜合考慮 拼接誤差與耗時的關係,確定最佳重疊度位置為圖中 A 點(此處 的最佳重疊度並不是指能夠獲取最高的配准精 度,而是指配准精度和耗時關係達到最優)。 由兩種拼接誤差模型所計算出的最佳重疊度分別為 0.25 和 0.375,結合無人機影像的特點, 可以將0.25~0.375 確定為最佳重疊度範圍,如圖 2-15 所示。圖2-15 重疊度、耗時、拼接誤差曲線示意圖 實驗中獲取無人機影像的航向重疊度約為70%,旁向重疊度約為 45%。按照最佳重疊度 要求,將影像 做“抽稀”處理,即對同一航帶上的影像隔一張取一張。對於相同測區面積來 說,拼接的影像數量將減少一半,拼接處理的時間也減少了一半,而整個影像的拼接精 度卻 有所提高。 何敬、李永樹、魯恒,「無人機影像拼接誤差實驗研究」,激光與光電子學進展,48 卷,12 期,2011。 學者王勃、龔志輝、顧廣傑、靳克強(2012),提出一種快速的無人機影像無縫拼接方法: 對輸入的原始影像按一定尺度進行降採樣,在降採樣的影像上進行 SURF 特徵提取和匹配, 利用RANSAC 方法估計初始的相對單應矩陣,然後用 Levenberg-Marquardt 方法精化單應矩 陣,計算出初始的絕對單應矩陣後利用稀疏光束法平差估計出精確的單應矩陣,通過降採樣 影像與原始影像的單應關係傳遞單應矩陣到原始影像級,最後進行影像合成,形成整體拼接 圖【18】。實驗選取了兩組某小型無人機在不同時期不同地方 獲取的低空遙感影像資料,資 料1 為 20 幅像幅大小為 2000 × 1500 的某野外彩色影像,資料 2 為 20 幅像幅大小為 2600 × 1733 的某城郊彩色影像,實驗分別對兩組資料進行了原始影像級和縮小尺度下的影像拼接 和稀疏光束法平差,為 了達到較好的拼接效果,實驗中對不同縮小尺度下 SURF 特徵檢測 參數進行了相應的調整,匹配時採用擴展的 SURF 描述符,如圖 2-16 所示。
圖2-16 平差前後的對比圖
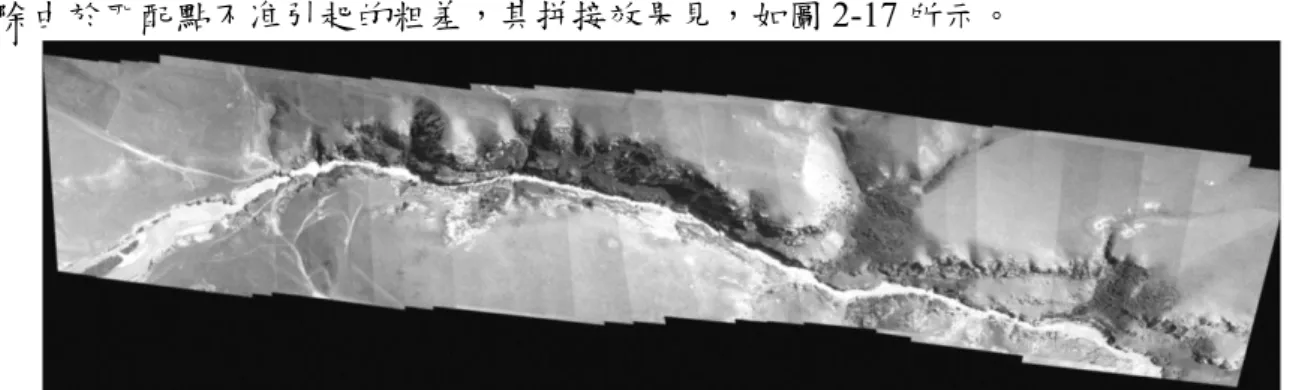
學 者 劉 慶 元 、 劉 有 、 鄒 磊 、 易 柳 城(2012) , 利 用 經 過 差 分 的 DGPS 資 料 和 IMU(Inertial measurement unit)獲取的外方位元元素,經過影像匹配產生的同 名點,獲得同名 點地理座標,使各個模型在此基礎上連接起來。經過影像重採樣用地理座標代替圖元座標, 使拼 接後的影像具有拍攝時的地理座標【19】。實驗結果表明:平坦地區投影差較小,可以 不進行投影誤差改正,直接利用 左右影像同名像點進行影像拼接; 丘陵山區因為投影誤差的 影響,影像拼接的誤差累積較快,此時應採用分帶拼 接,避免誤差積累。拼接後的影像座標 與拼接精度達到了 1׃2.5 萬比例尺影像圖的精度。實例 1 中國某地 2008 年實地航拍,航高 600 m, 影像尺寸 3888×2 596(圖元)。 DGPS/IMU 給出攝影外方位元素值,角元素精度為 60 ″,線元素精度為 20~ 10 m, GPS 更新率為 1 Hz。 實際地形大部分比較平坦,靠近河流部 分有些小山。拼接按每條航線進行,每片 與左、右片的同名點由專用影像點匹配軟體自動進 行, 匹配後拼接工作也是自動進行。在拼接過程中觀察的主要指標是殘差 V(residual error)和 中誤差 RMS(Root mean square), 對於超出中誤差 2~3 倍的 V 值對應的同名點給予剔除, 消除由於匹配點不准引起的粗差,其拼接效果見,如圖2-17 所示。
王勃、龔志輝、顧廣傑、靳克強,「一種快速的無人機影像無縫拼接方法」,測繪科學,第 37 卷,第 5 期,2012 陳宏敏、楊朝輝(2013)針對基於無人機平臺的攝影特點,使用 Wallis 濾波器進行影像勻 光,並結合Harris 運算元及 Ransac 演算法的優良特性,提出了一種基於遞迴思想的影像拼接 方法。通過對目標影像組批量處理,建立統一的坐標系統及資訊存儲結構,實現自動的全航 帶影像拼接功能,並通過應用實例驗證了該方法的有效性,本文方法結合了 Harris 角點提取 演算法和Ransac 一致性隨機抽樣演算法的優點,並使用遞迴思想將同 一航帶中的多張影像 自動地拼接起來。Harris 運算元 不僅可以在帶有旋轉、扭曲的影像上快速地進行點 特徵檢 測和提取,還能自訂輸出點的數量,可滿 足多種圖像的拼接需求。Ransac 演算法具有穩健 的平 差特性,保證了拼接結果的可靠性。 但該方法以左起第一張影像為基準,在多次坐 標 傳遞計算時,會產生累積誤差,從而影響到最終 的拼接效果。為了減小累積誤差,可考慮將 中間影 像作為基準,建立坐標系。由於篇幅有限,此方法 的改進策略就不在本文中展開論 述了【20】。 陳宏敏、楊朝輝,「無人機影像自動拼接方法」,測繪技術裝備,第15 卷,第 3 期,2013
第三節
無人載具相關法規
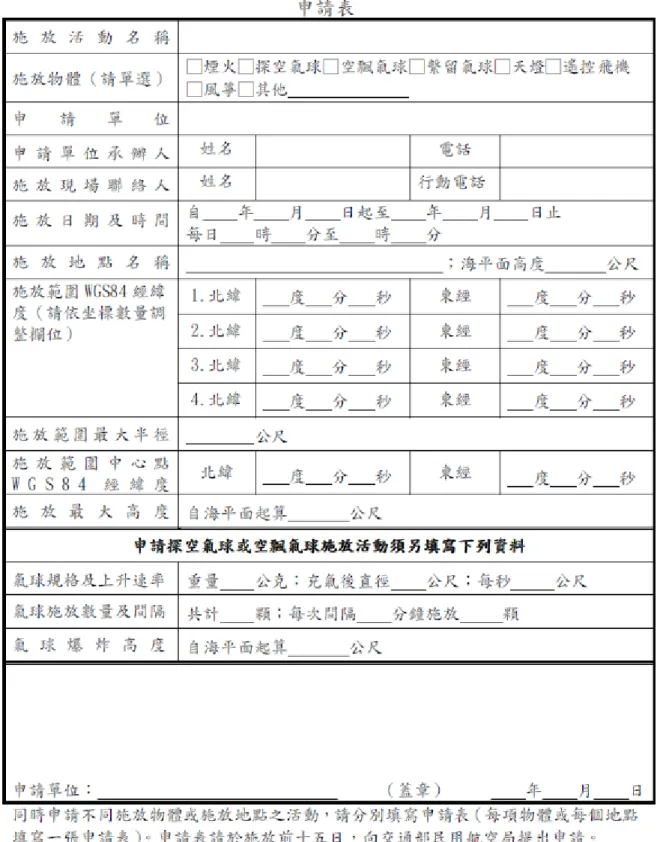
壹、 國內無人航空載具(UAV)相關法規 民航局現行法規將 UAV 定義為『有礙飛安物體』,非航空器【23】。 民航法第 99 條修訂大綱: 1. 飛航高度限制:400 呎以下(~121 公尺)。 2. 載重分級管理: 如圖 2-18 所示。 圖2-18 無人航空載具(UAV)載重分級管理 3. 無人航空載具(UAV)飛航限制,如圖 2-19 所示。圖2-19 無人航空載具(UAV)飛航限制
4. 民航局收受有礙飛航安全物體施放之申請:
需 15 日前向民航局提出申請,並經評估於未影響飛安情況下,且機場無航空器活動 時,得核准其施放,如圖 2-20 所示。
5. 我國 UAV 無人機管理現況 機場及周邊地區,參閱交通部民用航空局對機場四周禁止施放有礙飛航安全物體 實施要點。 機場四周以尸,鐵路法要塞堡壘地帶法、國家安全法。 民航局送立法院版本,民用航空法第九十九條增訂(修法中 草案版本 2015) 民航局送立法院版本,民用航空法第九十九條增訂(準備公聽會中 草案版本 2016) 相關罰則: 鐵路法:處 1 萬~5 萬元罰鍰。 要塞堡壘地帶法:處一年~七年有期徒刑。 國家安全法:處五年以下有期徒刑,並 100 萬元以下罰鍰。 公共危險罪:處五年以下有期徒刑。 妨害秘密罪:處三年以下有期徒刑、拘役或三萬元以下罰金。 機場領空 禁航、限航區:處 30 萬元~150 萬元罰鍰。 貳、 民用無人駕駛航空器系統空中交通管理辦法【21】(全文參見附錄一) 總 則 第二章 評估管理 第三章 空中交通服務 第四章 無線電管理 第五章 附 則 參、 中國民用航空局飛行標準司-輕小無人機運行規定【22】(全文參見附錄二) 目的 適用範圍及分類 定義 民用無人機機長的職責和許可權 民用無人機駕駛員資格要求
民用無人機使用說明書 禁止粗心或魯莽的操作任何人員在操作民用無人機時不得粗心大意和盲目蠻幹,以 免危及他人的生命或財產安全。 攝入酒精和藥物的限制 飛行前準備 限制區域 視距內運行(VLOS) 視距外運行(BVLOS) 民用無人機運行的儀錶、設備和標識要求 管理方式 無人機雲提供商須具備的條件 植保無人機運行要求 無人飛艇運行要求 廢止和生效
第三章 實驗設計規劃
第一節
實驗材料與設備
壹、石膏/黏著劑及瓷磚材料 本研究將採兩種基材(石灰、混凝土)黏貼瓷磚,首先採用市售灌制石膏試體, 使用比例為1:1 之 B 級石膏,且以石膏:水=1.1~1.2 之比例,分別稱量石膏 9.7kg、 水8kg,并調製石膏漿,如圖 3-1 所示。 圖3-1 石膏漿調製 將調製好的石膏漿倒入模具中,並以刮刀將石膏漿均勻抹平。將模具放入 烘箱中,以40°C 烘乾 24 小時,然後將石膏試體取出,如圖 3-2 所示。 圖3-2 石膏試體製作本研究實驗採用市售瓷磚黏著劑圖3-3 所示;以及校園內常用之二丁掛瓷 磚,及黏著劑:水=1.2:1 之配比調配,黏著劑用量 9.7kg,水 8kg。 圖3-3 黏著劑調製 圖3-4 實驗所用二丁掛瓷磚 本研究實驗採用二丁掛瓷磚之規格如表3-1 所示。 表3-1 二丁掛瓷磚之規格 製造公司 竹南窯業廠股份有限公司 廠牌 HM 光明牌 類型 I 類 等級 一級 尺寸 24 X 5.5 X 1
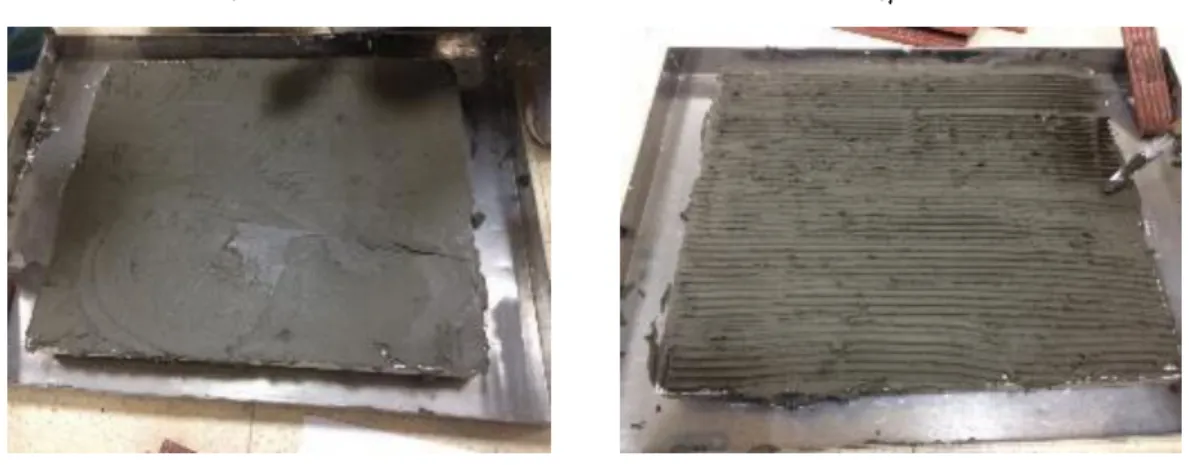
將黏著劑塗於石膏版上,在用刮刀慢出凹凸分明勾槽,如圖3-5 所示。
圖3-5 黏著劑塗抹及凹凸面
刮除預埋瓷磚缺陷位置黏著劑,製造相對瓷磚背面不完整,如圖3-6 所
示。
貳、實驗設備 本研究採用Phantom 4 無人機,搭載 FLIR 鏡頭之紅外線熱影像儀、智慧型 手機,整套系統主要包含3 個單元,分別為無人機、紅外線熱像儀與智慧型手機、 無人機遙控器與平板電腦,如圖3-7 所示。並租用高規格 INSPIRE 1 無人飛行載 具及ZENMUSE XT 紅外線熱顯像鏡頭規格如下所示。 圖3-7 無人載具紅外線系統 Phantom 4 無人機(UAV)技數參數飛行器、視覺系統、遙控器、APP / 圖 傳,如表3-2~3-5 所示。 表3-2 飛行器 無人飛行載具 重量(含電池及槳) 1380 克 軸距 350 mm 最大上升速度 6 m/s ( 運動模式 ) 最大下降速度 4 m/s ( 運動模式 ) 2 1 3
最大水平飛行速度 20 m/s ( 運動模式 ) 最大飛行海拔高度 6000 米 最大可承受風速 10 m/s (5 級風) 最大飛行時間 約 28 分鐘 工作環境溫度 0°C 至 40°C 衛星定位模組 GPS / GLONASS 雙模 GPS 懸停精度 垂直: +/- 0.1 米 (視覺定位正常工作時); +/- 0.5 米 水準: +/- 0.3 米 (視覺定位正常工作時);+/- 1.5 米 表3-3 視覺系統 視覺系統 前視視覺系統 下視視覺系統 速度測量範圍 飛行速度≤10 m/s(高度 2 米,光照充足) 高度測量範圍 0 - 10 m 精確懸停範圍 0 - 10 m 障礙物感知範圍 0.7 - 15 m 使用環境 表面有豐富紋理,光照條件充足 ( > 15 lux,室內日光燈 正常照射環境 ) 測量頻率 前視:10 Hz 下視:20 Hz FOV 前視:水平60°,垂直±27° 下視:前後70°,左右 50° 表3-4 遙控器 工作頻率 2.400 - 2.483 GHz 最大訊號有效距離 FCC: 5000 米 CE: 3500 米(無干擾、無遮擋) 工作環境溫度 0°C- 40°C
電池 6000 mAh 鋰充電電池 2S 等效全向輻射功率(EIRP) FCC: 23 dBm; CE: 17 dBm 工作電流/電壓 1.2 A @ 7.4 V 移動設備支架 適用於平板電腦或手機 影片輸出連接埠 USB 表3-5 傳輸 APP 移動設備App DJI GO 工作頻率 2.4GHz ISM 即時圖傳 720P @ 30fps 延時 220 ms 移動設備系統版本要求 iOS 8.0 或更高版本 Android 4.1.2 或更高版本
支援的移動設備 兼容iPhone 5s、iPhone 6、iPhone 6 Plus、iPhone 6s、 iPhone 6s Plus、iPod touch 6、iPad Pro、 iPad Air、 iPad Air Fi + Cellular、iPad mini 2、iPad mini 2 Wi-Fi + Cellular、iPad Air 2、iPad Air 2 Wi-Wi-Fi + Cellular、 iPad mini 3、iPad mini 3 Wi-Fi + Cellular、iPad mini 4、和 iPad mini 4 Wi-Fi + Cellular。此 App 已針對 iPhone 5s、iPhone 6 和 iPhone 6 Plus、iPhone 6s、 iPhone 6s Plus 優化。
兼容 Samsung tabs 705c、Samsung S6、Samsung S5、 Samsung NOTE4、Samsung NOTE3、Google Nexus 9、Google Nexus 7 II、Ascend Mate7、Huawei P8 Max、Nubia Z7 mini、Sony Xperia Z3、MI 3、MI PAD、Smartisan T1。
*支持的設備列表會持續更新和增加。
FLIR ONE™ 是小型熱影像儀,可以偵測看不見的熱能和測量溫度的細微變 化。支援Android 或是 iOS 的智慧型手機和平板裝置上,讓熱影像呈現在裝置 的螢幕上,相關功能如下:
連接到配有 micro USB(Android)或 Lightning 接頭( iOS ) 的智慧型手機 和平板。 160 x 120 熱錄像分辨率。 先進的現場測量檢測溫差小至 0.1°C 。 多光譜動態成像 (MSX®) 增強的熱圖像細節。 其紅外線鏡頭技術參數規格,如表3-6 所示: 表3-6 紅外線 FLIR ONE 技術參數 FLIR ONE 鏡頭 系統 參數
FLIR ONE iOS FLIR ONE Android
測量溫度範圍 -20° to 120°C(-4°F to 248°F) -20° to 120°C (-4°F to 248°F) 操作溫度範圍 0°C to 35°C (32°F to 95°F) 0°C to 35°C (32°F to 95°F) 重量 ~78 克(2.75 盎司) ~78 克(~78 盎司) 尺寸(長×寬× 高) 2.8 inches (72mm) × 1 inches (26mm) × 0.7 inches (18mm) 2.8 inches (72mm) × 1 inches (26mm) × 0.7 inches (18mm) 電池容量 350 mA-h FLIR ONE 不會消耗或影響連 接裝置的電源,FLIR 使用中 會自動切換到低電模式來延 長電池使用時間。 350 mA-h FLIR ONE 不會消耗或影響連 接裝置的電源,FLIR 使用中 會自動切換到低電模式來延 長電池使用時間。 可見式攝像頭 VGA ( 適用於 FLIR MSX blending) VGA ( 適用於 FLIR MSX blending) 感應能力 能夠偵測到0.1° C (0.18° F)程 能夠偵測到0.1° C (0.18° F)程
充電方式 Apple 專用接頭搭配 1AUSB 插頭 (只充 FLIR ONE 不充裝置) Android USB 接頭,電源線搭 配1AUSB 插頭 (只充 FLIR ONE 不充裝置) 認證與規格 FCC, CE, RoHS, CAN ICES-3
(B)/NMB-3(B), UL
FCC, CE, RoHS, CAN ICES-3 (B)/NMB-3(B), UL
裝置相容性 Apple 裝置
iPhone SE, iPhone 6 / iPhone 6 Plus, iPhone 5 / iPhone 5s, iPad Air / iPad Air 2, iPad Mini / iPad Mini 3, iPad (第四代)
(資料來源:FLIR 官網) 租用高規格 INSPIRE 1 無人飛行載具及 ZENMUSE XT 紅外線熱顯像鏡頭 之產品規格,如表3-7~表 3-10 所示: 表3-7 INSPIRE 1 無人飛行載具 無人飛行載具 重量(含電池及槳) 2845 克 軸距 559mm 最大上升速度 5 m/s ( 運動模式 ) 最大下降速度 4 m/s ( 運動模式 ) 最大水平飛行速度 22 m/s ( 運動模式 ) 最大飛行海拔高度 4500 米 最大可承受風速 10 m/s (5 級風) 最大飛行時間 約 18 分鐘 工作環境溫度 -10°C 至 40°C
表3-8 視覺系統 視覺系統 下視視覺系統 速度測量範圍 飛行速度≤8 m/s(高度 2 米,光照充足) 高度測量範圍 5- 500cm 精確懸停範圍 <3m 使用環境 表面有豐富紋理,光照條件充足 ( > 15 lux,室內日光燈 正常照射環境 ) 超聲波高度測量範圍 5 - 500 cm 超聲波使用環境 非吸音材質、硬質地面(厚地毯性能會有衰減) 表3-9 遙控器 工作頻率 2.400 - 2.483 GHz 最大訊號有效距離 FCC: 5000 米 CE: 3500 米(無干擾、無遮擋) 工作環境溫度 -10°C 至 40° C 電池 6000 mAh 鋰充電電池 2S 等效全向輻射功率(EIRP) 10dBm@900M [email protected] [email protected] 工作功耗 9 W 移動設備支架 適用於平板電腦或手機 影片輸出連接埠 USB、mini-HDMI 表3-10 傳輸 APP 移動設備App DJI GO 移動設備系統版本要求 iOS 8.0 或更高版本 Android 4.1.2 或更高版本
iPad Air Fi + Cellular、iPad mini 2、iPad mini 2 Wi-Fi + Cellular、iPad Air 2、iPad Air 2 Wi-Wi-Fi + Cellular、 iPad mini 3、iPad mini 3 Wi-Fi + Cellular、iPad mini 4、和 iPad mini 4 Wi-Fi + Cellular。此 App 已針對 iPhone 5s、iPhone 6 和 iPhone 6 Plus、iPhone 6s、 iPhone 6s Plus 優化。
兼容 Samsung tabs 705c、Samsung S6、Samsung S5、 Samsung NOTE4、Samsung NOTE3、Google Nexus 9、Google Nexus 7 II、Ascend Mate7、Huawei P8 Max、Nubia Z7 mini、Sony Xperia Z3、MI 3、MI PAD、Smartisan T1。
*支持的設備列表會持續更新和增加。
(資料來源:大疆創新官網http://www.dji.com/zh-tw/inspire-1/info#specs)
ZENMUSE-XT 是 DJI 雲台和 FLIR 高靈敏度熱成像相機突破光線和空間
的侷限,可隨時隨地捕捉清晰、精準的熱圖像。其紅外線ZENMUSE-XT 鏡頭 技術參數規格,如表3-11 所示: 表3-11 紅外線 zenmuse-xt 技術參數 ZENMUSE-XT 鏡頭 測量溫度範圍 14°至 104°F(-10°至 40°C) 非工作溫度範圍 -22°至 158°F(-30°至 70℃) 重量 270 克 尺寸(長×寬×高) 103 mm x 74 mm x 102 mm 照片格式 JPEG (8 bit) TIFF (14 bit) 視頻格式 MP4 像元間距 17 μm 全幀頻 30 Hz (NTSC) 25 Hz (PAL) 靈敏度 (NEdT) <50 mK at f/1.0 (資料來源:HTTP://WWW.DJI.COM/ZH-TW/ZENMUSE-XT)