國 立 交 通 大 學
電機與控制工程研究所
碩士論文
車輛輪胎與路面摩擦力之即時估測
Real-Time Estimation of Tire-Road Friction Forces
研 究 生:劉念冀
指導教授:蕭得聖 博士
車輛輪胎與路面摩擦力之即時估測
Real-Time Estimation of Tire-Road Friction Forces
研 究 生:劉念冀 指導教授:蕭得聖 博士
Student:Nien-Chi Liu Advisor:Dr. Te-Sheng Hsiao
國立交通大學 電機與控制工程研究所
碩士論文
A Thesis
Submitted to Department of Electrical and Control Engineering College of Electrical Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
In
Electrical and Control Engineering July 2010
車輛輪胎與路面摩擦力之即時估測
研究生:劉念冀 指導教授:蕭得聖 博士
國立交通大學電機與控制工程學系碩士班
摘要
隨著車用電子的技術蓬勃發展,人們對車輛的要求也日益增高,不論是在駕 駛的舒適性上,或是在目前所關注的環保節能上,這些條件已經成為一般民眾購 車的先決條件。在車輛行駛中往往會遇到各種不同的路面狀況,而路面狀況會直 接影響車輛輪胎與地面間的受力,所以可以藉由輪胎與地面間受力情況的不同, 判斷目前車輛行駛路面的狀況,也就是說欲得知路面狀況的不同,可以藉由估測 車輛輪胎與地面間的摩擦力不同來做判斷,所以本研究發展了一套只需使用容易 測量到的車輛動態再搭配車輛的動態模型來估測摩擦力的演算法,實驗中也建構 了一模擬車輛輪胎與路面間的實驗平台來驗證摩擦力估測的正確性。 本論文建立了一套摩擦力估測演算法,是利用輪胎的力矩平衡來求得縱向的 摩擦力,而側向的摩擦力是使用簡化車輛模型與腳踏車模型互相切換,並引入摩 擦力圓的概念來做估測,另外也是用了期望值最大化演算法來估測車輛的不確定 參數,然後模擬各種駕駛狀況與路面下摩擦力估測與不確定參數估測的結果;本 實驗中也架設了實驗平台,在利用此實驗平台進行的縱向力估測與結果分析。Real-Time Estimation of Tire-Road Friction Forces
Student:Nien-Chi Liu Advisor:Dr.Te-Sheng Hsiao
Institute of Electrical and Control Engineering Nation Chiao-Tung University
Abstract
Due to the advances in modern automotive technologies, requirements for driving comfort and being friendly to the environment are ever demanding. Vehicles run on roads with different surface conditions which make tire-road forces, and in turn the vehicle dynamics vary significantly. This study develops an algorithm that uses measurable signals and simple vehicle dynamic models to estimate tire-road friction forces. Then an experimental platform is established to simulate a tire rolling on a road surface such that the validity of the proposed algorithm can be verified experimentally.
This thesis establishes a friction force estimation algorithm which uses torque balance equations to obtain longitude friction forces. Lateral friction forces are estimated by introducing the concept of friction circles and switching between a simplified four-wheel model and the bicycle model. The uncertain parameters of the vehicle are also estimated on-line by applying the expectation-maximization algorithm. Finally, simulations are conducted under various driving and road conditions to evaluate the performance of parameter and tire-road force estimation. This study also sets up a quarter-car experimental platform to estimate longitudinal forces. Experimental results exhibit a linear relation between the longitudinal tire force and the slip ratio whenever the latter is low.
致謝
首先誠摯的感謝指導教授蕭得聖博士,老師悉心的教導以及對我研究能力的 信任,讓我能夠順利的在實驗平台上實現摩擦力估測演算法,不僅在理論上有更 清楚的認識,在實作方面的經驗也獲益匪淺,可謂獲益良多。 本論文的完成另外亦得感謝我的口試委員陳宗麟教授、徐保羅教授與李綱教 授。因為有各位老師在口試中給的建議及方向,使得本論文能夠更完整而嚴謹。 兩年裡的日子,感謝茂樵、東新學長不厭其煩的指出我研究中的缺失,且總 能在我迷惘時為我解惑,也感謝志誠同學與翊勳同學的共同砥礪。宜熹、偉仁、 勝元、偉杰學弟的加油與鼓勵,也讓我備感溫馨。也感謝其他實驗室的哲男、凱 銜、子恩、勳哥同學能在我研究陷入瓶頸時成為我的傾吐對像。也感謝在新竹的 國高中,大學同學,能在我研究無聊時提供我娛樂。 最後,要將此論文獻給獨自扶養我長大的母親,沒有她的鼓勵與教誨,絕對 沒有今天的我。目錄
中文摘要---I 英文摘要---II 目錄---IV 圖目錄---VI 表目錄---X 符號表---XI 第一章 緒論---1 1.1 研究背景---2 1.2 研究目的---2 1.3 研究貢獻---2 1.4 論文架構---3 第二章 相關研究---4 2.1 摩擦力估測相關研究---4 2.2 基於滑動(Slip based)估測方式相關研究---6 第三章 完整車輛模型---14 3.1 車輛運動座標系統---14 3.2 集中質量系統---15 3.2.1 車輛旋轉運動---16 3.2.2 車輛直線運動---19 3.3 非集中質量系統---20 3.3.1 轉向系統---20 3.3.2 車胎系統---21 3.3.3 懸吊系統---25 第四章 摩擦力估測演算法---294.1 摩擦力估測---30 4.1.1 縱向力估測---30 4.1.2 側向力估測---31 4.1.3 摩擦力圓---37 4.2 參數估測---43 4.2.1 E-step---45 4.2.2 M-step---48 第五章 模擬分析與探討---59 5.1 濾波器設計---60 5.2 直線前進---62 5.3 J-Turn---66
5.4 Single Lane Change---73
5.5 數據分析與探討---78 第六章 硬體架設與實驗---84 6.1 硬體架設與實驗---84 6.1.1 輪內馬達---84 6.1.2 模擬地面之橡膠輪胎---85 6.1.3 感測器---85 6.1.4DSP 與外部電路---86 6.1.5 完整實驗平台---88 6.2 實驗分析與探討---90 6.2.1 濾波器設計---90 6.2.2 轉動慣量估測---91 6.2.3 縱向力估測與分析---93 第七章 結論與未來工作---101
附錄二---105 附錄三---106 參考文獻---108
圖目錄
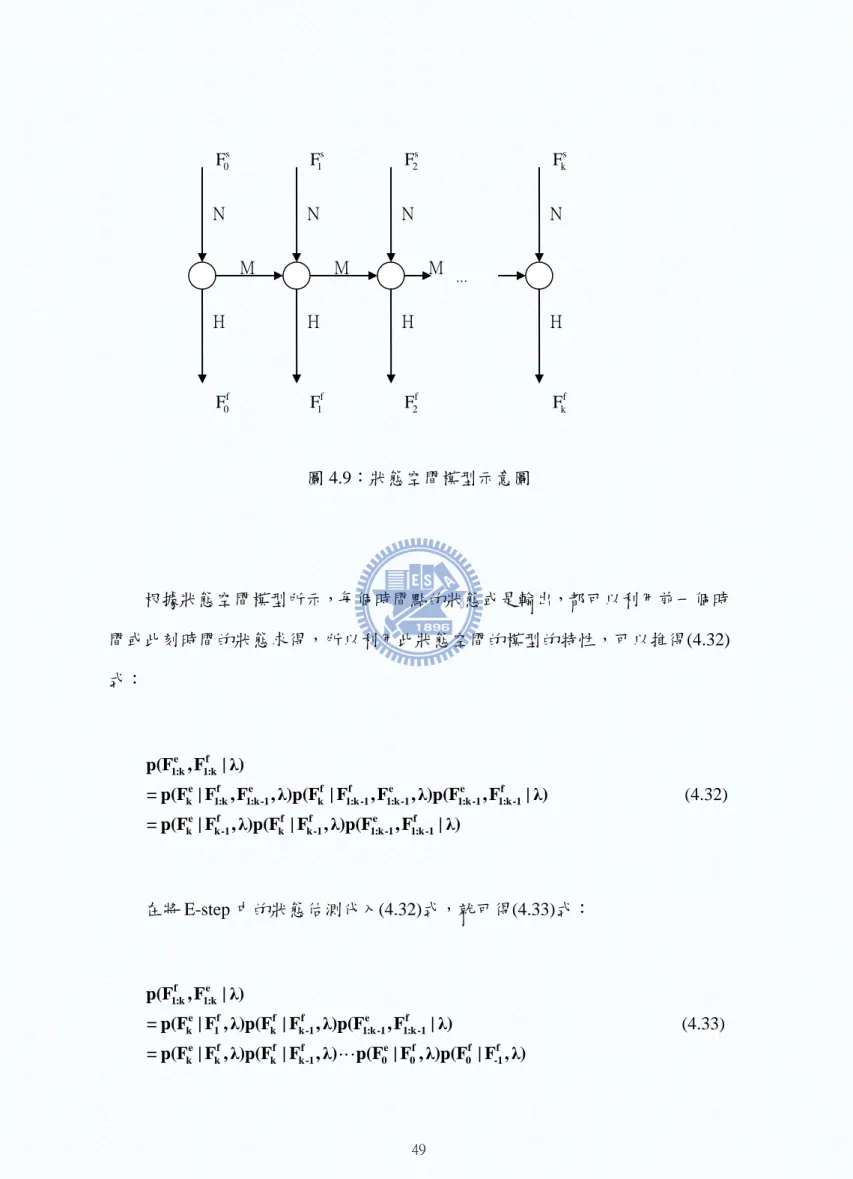
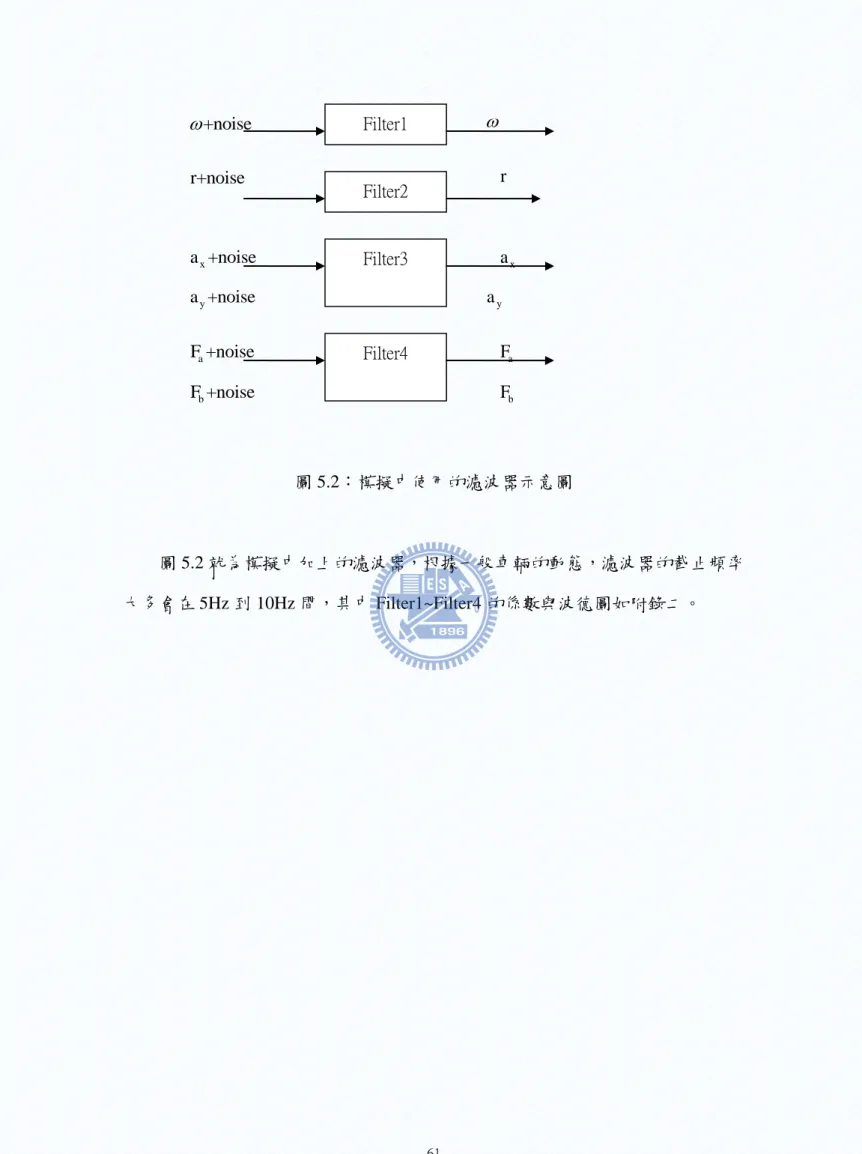
圖 2.1:摩擦力估測研究的分類圖---5 圖 2.2:側滑角示意圖---6 圖 2.3:(2.2)式滑動比(側滑角)對摩擦力做圖,C =2480 C =2.2 C =24.8 C =-1.61 、 2 、 3 、 4 --7 圖 2.4:(2.3)式滑動比(側滑角)滑動對摩擦力做圖,C =2500 C =4 C =2 C =0.6 v=15m/s1 、 2 、 3 、 4 、 ---7 圖 2.5:(2.4)式滑動比(側滑角)滑動對摩擦力做圖,K =15000s 、C =51 、C =0.22 ----8 圖 2.6:(2.5)式滑動比(側滑角)滑動對摩擦力做圖,C =28001 、C =402 、C =5003 ----9 圖 2.7:(2.6)式滑動比(側滑角)滑動對摩擦力做圖,C =70001 、C =25002 ---9 圖 2.8:摩擦力與車輛負載(Fz)關係圖---10 圖 2.9:摩擦力與路面摩擦係數(μ)關係圖---10 圖 2.10:摩擦力估測流程圖---11 圖 3.1:路面座標系轉換成非集中質心座標系示意圖---15 圖 3.2:非集中質心座標系轉換成質心座標系示意圖---15 圖 3.3:車體自由體圖---16 圖 3.4:Ackermann 轉向原理示意圖---21 圖 3.5:輪胎自由體圖---22 圖 3.6:輪胎側滑角示意圖(左)、轉向側頃示意圖(右) ---23 圖 3.7:輪胎縱向自由體圖---25圖 3.8;懸吊系統自由體圖---26 圖 4.1:摩擦力估測流程圖---29 圖 4.2:簡化車輛自由體圖---31 圖 4.3:腳踏車模型自由體圖---35 圖 4.4:A 矩陣條件值示意圖---36 圖 4.5:摩擦力圓示意圖---38 圖 4.6:(左)側滑角與最大側向力與正向力之關係圖、(右)滑動比與最大縱向力與 正向力之關係圖---39 圖 4.7:期望值最大化演算法示意圖---44 圖 4.8:卡爾曼濾波器示意圖---45 圖 4.9:狀態空間模型示意圖---49 圖 4.10:轉動慣量示意圖---54 圖 5.1:車輛駕駛狀況示意圖---59 圖 5.2:模擬中使用的濾波器示意圖---61 圖 5.3:模擬一之縱向力估測結果---62 圖 5.4:模擬一之車速變化圖---62 圖 5.5:模擬二之縱向力估測結果---63 圖 5.6:模擬二之車速變化圖---63 圖 5.7:模擬三之縱向力估測結果---64 圖 5.8:模擬三之車速變化圖---64 圖 5.9:模擬四之縱向力估測結果---65 圖 5.10:(左)模擬四之車速變化圖(右)煞車力矩---65 圖 5.11:(左)模擬五之外側輪轉角(右)模擬五之路面摩擦係數---67 圖 5.12:模擬五之縱向力估測結果---67 圖 5.13:模擬五之側向力估測結果---68
圖 5.15:圖 5.15:(左) 模擬六之外側輪轉角(右)模擬六之路面摩擦係數---69 圖 5.16:模擬六之縱向力估測結果---69 圖 5.17:模擬六之側向力估測結果---70 圖 5.18:圖 5.18:模擬六之參數估測結果---70 圖 5.19:(左)模擬七之外側輪轉角(右)模擬七之路面摩擦係數---71 圖 5.20:模擬七之縱向力估測結果---71 圖 5.21:模擬七之側向力估測結果---72 圖 5.22:模擬七參數估測結果---72 圖 5.23:(左)模擬八之外側輪轉角(右)模擬八之路面摩擦係數---74 圖 5.24:模擬八之縱向力估測結果---74 圖 5.25:模擬八之側向力估測結果---75 圖 5.26:模擬八之參數估測結果---75 圖 5.27:(左)模擬九之外側輪轉角(右)模擬九之路面摩擦係數---76 圖 5.28:模擬九之縱向力估測結果---76 圖 5.29:模擬九之側向力估測結果---77 圖 5.30:模擬九之參數估測結果---77 圖 6.1:模擬車輛之輪胎---85 圖 6.2:模擬路面之輪胎---85 圖 6.3:TRD305 力矩與轉速感測器---86 圖 6.4:CP-3HK-100 電位計---86 圖 6.5:ds1104 控制介面---87 圖 6.6:二偕低通巴特沃茲濾波器---87 圖 6.7:馬達驅動電路---88 圖 6.8:完整實驗平台---89 圖 6.9:輪胎剛度示意圖---90
圖 6.11:轉動慣量估測二感測器訊號(左)轉速(中)轉矩(右)轉動慣量---92 圖 6.12:轉動慣量估測三感測器訊號(左)轉速(中)轉矩(右)轉動慣量---92 圖 6.13:實驗一轉速命令---94 圖 6.14:實驗一量測數據(左上)轉動力矩(右上)輪胎轉速(左下)滑動比(右下)縱向 力---94 圖 6.15:實驗一之輪胎剛度---94 圖 6.16 實驗二轉速命令---95 圖 6.17:實驗二量測數據(左上)轉動力矩(右上)輪胎轉速(左下)滑動比(右下)縱向 力---95 圖 6.18:實驗二之輪胎剛度---95 圖 6.19:實驗三轉速命令---96 圖 6.20:實驗三量測數據(左上)轉動力矩(右上)輪胎轉速(左下)滑動比(右下)縱向 力---96 圖 6.21:實驗三之輪胎剛度---96 圖 6.22:實驗四轉速命令---97 圖 6.23:實驗四量測數據(左上)轉動力矩(右上)輪胎轉速(左下)滑動比(右下)縱向 力---97 圖 6.24:實驗四之輪胎剛度---97 圖 6.25:實驗五轉速命令---98 圖 6.26:實驗四量測數據(左上)轉動力矩(右上)輪胎轉速(左下)滑動比(右下)縱向 力---98 圖 6.27:實驗五之輪胎剛度---98
表目錄
表 5.1:直線前進之縱向力誤差---78 表 5.2:模擬五之側向力誤差---78 表 5.3:模擬六之側向力誤差---79 表 5.4:模擬七之側向力誤差---79 表 5.5:模擬八之側向力誤差---79 表 5.6:模擬九之側向力誤差---80符號表
ψ :橫擺角 θ :俯仰角 φ :側傾角 ,y,z x w :車體座標上之三軸角速度 x,y,z M :作用再車體座標上三軸的轉動力矩 Z :非集中座標上車體質心的初始位置 x,y,z :質心三軸上的位移 x F :平行車身的力 y F :垂直車身的力 z F :正向力 a F :平行輪胎的力 b F :垂直輪胎的力 nner i δ :內側輪轉向角 uter o δ :外側輪轉向角 r s :滑動比 α :側滑角 :加速力矩b T :煞車力矩 x,y,z I :車體座標上三軸的轉動慣量 v m :車體質量 1 l :質心到前輪輪軸長度 2 l :質心到後輪輪軸長度 1 sb :車輛前輪距離 2 sb :車輛後輪距離 h :車輛高度
x,y x,y x,y x,y
B ,C ,D ,E :輪胎參數 e r :輪胎真實半徑 r :輪胎等效半徑 wheel K :輪胎彈力係數 i k :車輛側傾係數 w I :輪胎轉動慣量 ω :輪胎的轉動加速度 1 C 、C 、2 C 3 :懸吊系統非線性彈簧係數 D :懸吊系統阻尼係數 H :懸吊伸長量 H :懸吊伸長速度 w m :輪胎質量
b,bicy F :腳踏車模型解出的側向力 a F :最大縱向力 b F :最大側向力 w :過程雜訊(process noise) v :量測雜訊(measurement noise) f k F :動態方程式的狀態 e k F :動態方程式的輸出 s :質心偏移 r d :質心到車尾長度 f d :質心到車頭長度 v d :車輛總長
第一章 緒論
1.1 研究背景
隨著車用電子的技術蓬勃發展,人們對車輛的要求也日益增高,不論是在駕 駛的舒適性上,或是在目前所關注的環保節能上,這些條件已經成為一般民眾購 車的先決條件。另外近年來在台灣,每家每戶都有一至兩輛車,但是台灣人口密 度極高,道路狹窄,交通事故頻傳,所以安全駕駛系統在台灣的發展也是一個非 常重要的課題之一。 在車輛行駛中往往會遇到各種不同的路面狀況,而路面狀況會直接影響車輛 輪胎與地面間的受力,所以可以藉由輪胎與地面間受力情況的不同,判斷目前車 輛行駛路面的狀況,也就是說欲得知路面狀況的不同,可以藉由估測車輛輪胎與 地面間的摩擦力不同來做判斷。目前被廣泛利用的煞車防鎖死系統(ABS)在道路 駕駛的安全性上就有莫大的貢獻,但是現今 ABS 對路況的適應能力並未達到最 佳狀態,如果 ABS 系統能夠有車輛輪胎與地面間的摩擦力資訊,就能讓 ABS 系 統依照當下路面的狀況決定煞車力道的大小,使車輛能在最短的時間內達到駕駛 者希望的煞車行為,在 Yi et al[1]的論文中將摩擦力估測使用在緊急煞車系統 上,判斷當時輪胎與地面間的摩擦力,來決定煞車力道的大小。在車輛控制方面 也會利用及時路況判斷來做控制,通常車輛控制都會著重在駕駛者的舒適性與車 輛行駛的安全性,例如在車輛行經水坑時,控制器保持車輛受力帄衡不打滑,或 是在車輛作轉向時,讓地面提供輪胎較大的摩擦力讓轉彎半徑縮小達到最有效率 的轉向,這些行駛的狀況都會跟路面的狀況有相當大的關係,因此摩擦力的估測 能讓控制器決策車輛動態時更為精確快速,在 Yi et al[2]的論文中就利用摩擦力 估測作為控制器決策車輛動態時的依據。 另外一方面,隨著世界各國環保意識的抬頭,各國都在發展低污染、低耗能效率不夠高,轉換成的動能會消耗在沒有必要的地方,像是在一般道路狀況時, 車輛無法判斷路面狀況,能量通常都會消耗在摩擦力上,若電動車具有摩擦力估 測的系統,判斷路面與輪胎的摩擦力,就可以更有效的決定車輛的行駛動態,讓 電動車達到低耗能的效果。 以上的敘述可以得知摩擦力的估測會對車輛控制的研究有很多正面的影 響,所以本研究最主要是發展摩擦力估測的演算法與建立一個能夠模擬車輛輪胎 與路面的研究帄台,當摩擦力估測準確後就可以提供控制器研究的研究者正確的 摩擦力資訊,讓控制器的設計更為穩健快速。
1.2 研究目的
本研究的目的在於發展摩擦力估測演算法與建立一個能夠模擬車輛輪胎與 路面間的實驗帄台,此摩擦力估測演算法的發展,能讓之後做車輛控制研究的研 究者得到更正確的摩擦力資訊。 在此研究中會分成兩個部分,一開始會建立一個完整的車輛模型來模擬真實 車輛的動態,然後利用真實車輛模型能提供的車輛動態資訊來發展摩擦力估測演 算法,後面的部分主要是建立一實驗帄台,此實驗帄台能與模擬結合,成為一個 硬體迴路(Hardware-in-the loop)的結構,以此來驗證演算法的正確性。1.3 研究貢獻
本研究將發展一套可以利用容易得到的車輛資訊來完成估測摩擦力的演算 法,一般得知摩擦力的方法為對車輛輪胎進行各種化學與物理的分析,爾後建立 輪胎的模型,但是要對每輛車輛的每個輪胎作此分析不但費時,輪胎的模型也會使用的車用感測器與車輛的動力學特性就可以求得欲得知的摩擦力,然後對車輛 容易改變的參數進行估測來確保任意狀況下演算法的穩健性。 在來就是建立可以模擬車輛輪胎與路面情況的硬體,來驗證摩擦力演算法的 正確性,之後更能利用此帄台來實現車輛控制的實驗。
1.4 論文架構
論文各章節的編排如下 第一章 緒論:描述研究背景、動機與目的 第二章 相關研究:此章節會介紹各種不同的摩擦力研究方法,並針對其中一種 估測方法深入討論,然後簡介本研究欲使用之估測方法。 第三章 完整車輛模型:在此章節會建立一個高階的車輛動態模型,目的是為了 在模擬中有一個更貼近真實車輛的參考模型來確定本研究演算法的正確 性。 第四章 摩擦力估測:發展摩擦力估測的演算法與參數估測的演算法。 第五章 模擬與結果討論:模擬各種駕駛狀況下演算法的估測情況,並且討論估 測結果。 第六章 實驗與結果討論:將演算法套入硬體實驗,並分析數據來驗證模擬的結 果。 第七章 結論與未來展望:總結本研究並提出未來能更深入發展的方向。第二章 相關研究
摩擦力是一種接觸力,兩物體的表面互相接觸後,若物體間有相對運動就會 有摩擦力的產生,這類的固體表面間接觸的摩擦力就行為上來看,分成了滑動摩 擦、滾動摩擦、滾壓摩擦、以及轉動摩擦,分別是描述各種物體間相對運動方式 不同所產生的摩擦現象,滑動摩擦很單純的就是兩個不帄滑物體表面相對運動所 產生的摩擦;滾動摩擦就是一個物體在不帄滑物體的表面上滾動的摩擦現象:而 當相對運動有滑動與滾動同時存在就稱為滾壓摩擦;當物體單純繞著固定軸旋轉 就是轉動摩擦。而車輛輪胎同時存在三種摩擦現象,輪胎鎖死時完全打滑的狀態 為滑動摩擦;車胎卡在水坑中轉動卻沒有前進時的轉動摩擦;與一般車輛行駛狀 態下的滾壓摩擦。 而車胎的摩擦力會隨著許多條件變化而有所不同,例如車胎所承受的車輛負 載、車胎的轉動速度、輪胎的材質、胎壓的大小、輪胎溝槽的深淺,以上這些物 理或是化學的條件都會直接的影響車胎與地面間摩擦力的變化,反之,車胎摩擦 力的變化也會影響車輛行駛的動態,例如車速,轉動速度,側向加速度這些物理 量。 然而了解摩擦力的種類,與摩擦力的影響後,接下來會對現有的摩擦力估測 演算法加以探討分析,以了解目前摩擦力演算法的種類與利弊。2.1 摩擦力估測相關研究
依照Muller at el[3]的研究中,大致上把摩擦力的估測分成兩大部分,如圖 2.1,第一大部分就是研究造成摩擦力改變的因素,進而推得摩擦力,這種估測 方式稱為基於原因(Cause Based)的估測,Bachmann[4]的研究中就使用了胎壓感 測器加上分析輪胎的材質與溝痕形狀後來進行估測,而Eichhorn and Roth[5]使用統鑑別的技術來建立車胎的摩擦力模型,而在Breuer et al[6]的研究中,在車胎附 近裝上一光學感測器,此光學感測器是用來分析車輛行經路面的路面狀況,再利 用路面狀況與輪胎的特性來做摩擦力的估測,這些研究中都有一個共通點,就是 研究者會利用各種不同的感測器來測量一些較難得到的輪胎特性,這些感測器取 得不易,一些化學上的分析也不利於即時的摩擦力估測。 圖 2.1:摩擦力估測研究的分類圖 另外一種估測方式就是研究摩擦力造成的影響,此類方式稱為基於影響 (Effect based)的估測,此方法中又可以細分成三大子類,前面兩大子類為分析摩 擦力造成的輪胎形變和分析車胎與路面間摩擦力造成的雜音,Hollingum[7]的研 究中就使用音訊的感測器來分析車輛行駛時車胎的雜音,Bekker et al[8]也研發出 了可以放置於輪胎內,測量輪胎形變量的感測器,利用此感測器所提供的形變資 訊,就可以求得欲得知的摩擦力。而另外一類就是摩擦力造成的車輛運動變化, 此類別為目前估測摩擦力主要方式,所以在下一小節詳細介紹。 摩擦力估測 基於影響 基於原因 基於滑動 輪胎材質 路面材質 雜音 型變 加速 煞車 側滑
2.2 基於滑動(Slip based)估測方式相關研究
基於滑動的摩擦力估測方式為基於影響的估測方式中的一個子類別,主要是 在分析滑動與摩擦力之間的關係。所謂的滑動可以分成縱向的滑動與側向的滑 動 , 在 縱 向 的 滑 動 上 為 輪 胎 前 進 速 度 與 車 輛 質 心 前 進 速 的 差 值 作 正 規 化 (normalize),此物理量稱為滑動比(Slip ratio),如(2.1)式;另外一種側向上的滑動 為車輛轉向時,車胎胎面朝向與速度朝向間的角度差,稱為側滑角(Slip angle), 如圖 2.2。 r V - rω s = max(V,rω) (2.1) 其中 V 為車速,r為輪胎半徑,ω 為輪胎轉速。 圖 2.2:側滑角示意圖 之所以利用分析側滑角與滑動比,原因是因為在諸多實驗研究所示,測滑角 車頭朝向 速度朝向 車胎朝向 側滑角側 滑 角 與 側 向 力 和 滑 動 比 與 縱 向 力 之 間 的 數 學 關 係 , 此 關 係 稱 為“Magic Formula”,此公式為透過材料力學分析、化學分析、實驗測試所得到的結果,其
中C [9]為車胎的特性參數,s 代表側滑角或滑動比,如式(2.2),如圖 2.3: i
-1 -1
1 2 3 4 3 3
F(s)=C sin (C tan (C s-C (C s-tan (C s)))) (2.2)
0 0.2 0.4 0.6 0.8 1 0 500 1000 1500 2000 2500 slip ratio Fo rc e 0 0.1 0.2 0.3 0.4 0.5 0 500 1000 1500 2000 2500 slip angle(rad) Fo rc e 圖 2.3:(2.2)式滑動比(側滑角)對摩擦力做圖,C =2480 C =2.2 C =24.8 C =-1.61 、 2 、 3 、 4 Burckhardt[10]也提出了類似的關係式,關係式中多了速度(v)此項參數,可 以描述在不同速度下的摩擦力曲線,其中C [10]為車胎的特性參數,s 代表側滑i 角或滑動比,如式(2.3) ,如圖 2.4: 2 4 -C s -C v 1 3 F(s,v)=(C (1-e )-C s)e (2.3) 0 0.2 0.4 0.6 0.8 1 0 500 1000 1500 2000 2500 slip ratio Fo rc e 0 0.1 0.2 0.3 0.4 0.5 0 500 1000 1500 2000 2500 slip angle(rad) Fo rc e
而後 Kiencke and Daiss[11]忽略了摩擦力曲線與其速度之間的關係,並且加 入了輪胎剛度(Stiffness)此項變因來描述摩擦力曲線,其中K 為輪胎剛度,s C [11]i 為車胎的特性參數,s 代表側滑角或滑動比,如式(2.4) ,如圖 2.5: s 2 1 2 s F(s)=K C s +C s+1 (2.4) 0 0.2 0.4 0.6 0.8 1 0 500 1000 1500 2000 2500 3000 slip ratio Fo rc e 0 0.1 0.2 0.3 0.4 0.5 0 500 1000 1500 2000 2500 3000 slip angle(rad) Fo rc e 圖 2.5:(2.4)式滑動比(側滑角)滑動對摩擦力做圖,K =15000s 、C =51 、C =0.22 另一篇 Burckhardt[12]的文獻中也將原本加以考慮的速度加以忽略,把先前 提出過的(2.3)式加以簡化,使之成為三個參數的摩擦力曲線,如(2.5)式,爾後 Burckhardt[12]為了在使即時估測時的運算更加簡化,就提出了如同(2.6)式更加簡 化的摩擦力曲線,其中C [12]為車胎的特性參數,s 代表側滑角或滑動比,如圖i 2.6,圖 2.7。 2 -C s 1 3 F(s)=C (1-e )-C s (2.5)
0 0.2 0.4 0.6 0.8 1 0 500 1000 1500 2000 2500 3000 slip ratio Fo rc e 0 0.1 0.2 0.3 0.4 0.5 0 500 1000 1500 2000 2500 3000 slip angle(rad) Fo rc e 圖 2.6:(2.5)式滑動比(側滑角)滑動對摩擦力做圖,C =28001 、C =402 、C =5003 1 2 F(s)=C s-C s (2.6) 0 0.2 0.4 0.6 0.8 1 0 500 1000 1500 2000 2500 slip ratio Fo rc e 0 0.1 0.2 0.3 0.4 0.5 0 500 1000 1500 2000 2500 slip angle(rad) Fo rc e 圖 2.7:(2.6)式滑動比(側滑角)滑動對摩擦力做圖,C =70001 、C =25002 以上所描述的這些方程式,其中的參數都會與車胎的胎壓,車輛負載,以及 表面材質有很大的關係,通常在車胎出廠時會對車胎做測試,求得這些摩擦力曲 線的特性參數。 觀察圖 2.3 到圖 2.7,可以很容易的發現這是一個非線性的結果,在一開始 的線性區時,當滑動越來越大,摩擦力也就越來越大,但是滑動比到一個極值時, 摩擦力也會跟著達到最大上限,而後隨著滑動的增加,摩擦力會慢慢遞減,而通
擦係數是表示路面材質不同的參數,通常越粗糙或越乾燥的表面摩擦係數越大, 越光滑或越濕潤的表面摩擦係數越小,一般柏油路面的摩擦係數大概為 0.85,而 下雨天時的柏油路面大概為 0.65,當車輛負載與路面摩擦係數越大時極值越大, 反之則越小,如圖 2.8、圖 2.9: 0 0.2 0.4 0.6 0.8 1 0 500 1000 1500 2000 2500 3000 slip ratio Fo rc e Fz=3000 Fz=4000 Fz=2000 0 0.1 0.2 0.3 0.4 0.5 0 500 1000 1500 2000 2500 3000 slip angle(rad) Fo rc e Fz=3000 Fz=4000 Fz=2000 圖 2.8:摩擦力與車輛負載(Fz)關係圖 0 0.2 0.4 0.6 0.8 1 0 500 1000 1500 2000 2500 slip ratio Fo rc e mu=0.85 mu=0.65 mu=0.55 0 0.1 0.2 0.3 0.4 0.5 0 500 1000 1500 2000 2500 slip angle(rad) Fo rc e mu=0.85 mu=0.65 mu=0.55 圖 2.9:摩擦力與路面摩擦係數(μ)關係圖 滑動比與側滑角被視為車體的動態,是因為摩擦力造成車輛行駛狀況改變 時,滑動比與側滑角也會跟著改變,所以如果可以求得滑動比或是側滑角,則可 以利用滑動比和側滑角與摩擦力曲線來獲得摩擦力資訊,在 Dieckmann[13]的研 究中,就是利用已知的摩擦力曲線參數搭配滑動比或側滑角的估測來求得摩擦
擦力估側,Hwang and Song [15]也進一步利用了摩擦力曲線中摩擦極值的估側來 確保煞車系統能提供的最大煞車力道。另外在 Hanh[16]的研究中,為了求得準確 的滑動比與側滑角,更是使用了全球定位系統(GPS)與差分式全球定位系統 (DGPS)來取得車輛位置與速度的精確資訊,在利用研究中所推導的高階摩擦力 曲線來求得摩擦力。 另外一種滑動比與側滑角估測的方式就是為利用摩擦力造成滑動比與側滑 角後,間接影響車輛行駛的狀態,此類研究會利用不同的狀態估測方法來求得車 輛動態方程式(Dynamic equation)中的動態,再利用這些資訊來求解摩擦力,如圖 2.10: 圖 2.10:摩擦力估測流程圖 Ray[17]建立了一個各種摩擦係數的路面下,車輛行駛狀況的資料庫,之後 再進行即時估測時比對行駛狀態與資料庫的內容相符程度來決定目前車輛所行 駛的路面摩擦係數。Tsunashima et al[18]與 Ray[17]方法類似,也是將資料庫與行 駛狀況利用多模型逼近(Multi-Model Approach)的方式來比對屬於哪一個路面摩 擦係數情況的機率較大。 Ray et al[19]在另一篇文章中也提出了使用車輛動態方程式作估測依據,Ray t al[19]認為摩擦力是一動態方程式中的狀態,並且假設摩擦力的二次微分為高斯 實際車輛 觀測器 駕駛人命令 已知狀態 未知狀態、摩擦力
F F 0 1 = +n(t) 0 0 F F (2.7) 而 Baffet[20]是將摩擦力視為輪胎剛度與滑動比的乘積,如(2.8)式,當摩擦 力曲線在線性區時,輪胎剛度不變,而曲線離開線性區後就視為輪胎剛度的改 變,Baffet[20]也是將輪胎剛度視為車輛動態方程式裡的狀態,且一次微分為高 斯雜訊,再利用順滑模式觀測器(Sliding Model Obserever)來做估測。
s s F=K s K =n(t) (2.8) Canudus et al[21]的論文中,直接建立了輪胎的動態方程式,此動態方程式 稱為 LuGre Model,其動態方程式為形變量的一次微分與形變量、車速、滑動比、 側滑角、輪胎剛度間的微分方程式,再利用型變量與車輛負載來求出摩擦力如(2.9) 式,其中 z 為形變量,C 為輪胎參數,i v 為車速,r g(v ) 為與摩擦細數有關之函r 式: 1 r r r 1 2 3 r z C |v | z=v - z g(v ) F=(C z+C z+C v )F (2.9)
Yi.K and Jeong[22]就是利用實驗的方式求得(2.8)中相關的參數,即時估測時 再利用觀測器求得(2.9)式中所需要的狀態,解得一微分方程式後求得摩擦力。S.H. Park[23]的研究中也是使用 Canudus et al[21]的動態模型,並也建立了一實驗帄台 來加以佐證演算法的正確性。
上述的研究中,基於原因的摩擦力估測方式大多會使用很多化學分析來分析 輪胎的特性,但是化學分析只是分析特定的輪胎,當車輛換上其他輪胎便不再適 用,所以利用化學分析的摩擦力估測方式並不強健,也不利於即時的分析。而在 基於影響的方法利用特殊的感測來測量器輪胎的形變或是胎壓的變化,但是這些 感測器的價位很高,一般也不容易取得,所以不利於廣泛運用。另外在基於滑動 的摩擦力估測中大多會建立摩擦力對滑動比或側滑角的模型,再來估測滑動比與 側滑角來推算摩擦力,但是想要得知此模型大多還是靠著物理或是化學的分析得 知模型的參數,或是利用系統鑑別的方式建立此模型,上述這些輪胎模型建立的 摩擦力分析方式,也只試用在已分析過的輪胎上,因此當行駛中輪胎特性發生了 改變,建立出來的輪胎模型也失去了正確性。本研究將提出一個可以即時估測摩 擦力的方法,此方法不需要得知輪胎的模型,只需利用感測器所提供的資訊搭配 上車體的動力學方程式來就可求得摩擦力,使用的感測器也是一般市面上容易取 得的感測器。在[19][20]的研究中雖然也是不利用輪胎模型來求得摩擦力,但是 使用的車輛模型是簡化過的腳踏車模型(Bicycle model),此模型只考慮左右輪的 合力,所以在這些方法中無法求得車輛每顆輪胎個別的摩擦力,若可以得知各輪 胎所受之摩擦力,就可以針對個別輪胎當下的路面狀況做不同的控制,所以在本 研究中利用了車輛輪胎本身的摩擦力圓的特性,就可以得知每顆輪胎所受的摩擦 力大小。另外車輛本身的參數也會有不確定的情況,像是車輛在行使時會有乘載 數的問題,乘載數的不同,全車的重量也會改變,進而影響到摩擦力的估測,或 是車輛本身的轉動慣量、車長與車寬也會隨著每輛車的不同而有所改變,所以本 研究也會針對車輛的參數做估測來確保摩擦力估測的穩健性
第三章 完整車輛模型
本章節中將介紹研究中所使用的車輛模型,此車輛模型是參考 Hingwe[22] 的論文中所提出的車輛動態模型,此模型為一個二十階的完整車輛模型。在此將 車輛模型分成了兩個部分,分別是集中質量系統(Sprung-mass System)與非集中質 量系統(Unsprung-mass System)。集中質量系統就是指車體,在此將車體視為一 剛體,此剛體會有旋轉運動與直線運動;非集中質量系統又分為懸吊系統與車輛 輪胎,車輛輪胎與地面接觸時會產生摩擦力,此摩擦力會改變集中質量系統的運 動方式,懸吊系統是連接輪胎與車體的系統,主要目的是保持車身的帄衡,讓車 輛在行駛時不至於翻覆。接下來就在 3.1 節介紹車輛的座標系統,3.2 節介紹集 中質量系統,3.3 節介紹非集中質量系統。3.1 車輛運動座標系統
本研究中為了描述車體在空間的運動,所以訂定出了三種不同的座標系統, 分別是固定於地表上的地表座標、固定在非集中質心上的非集中質心座標、然後 是位於車體質心上的車體座標,三個座標間是利用尤拉角(Euler angle)來做轉換。 首先定義地表座標係 G E ,地表座標的原點可以放置在任何地方,將地表座 標對 z 軸逆時針旋轉,對準非集中質心座標系 u E ,非集中質心座標的原點在車 輛集中質心對地面的投影點,x 軸為車頭方向,z 軸為垂直地面的方向,朝上為 正向,y 軸為垂直車身的方向,使得 x、y 與 z 軸滿足右手法則,此時旋轉的角 度稱為橫擺角(Yaw angle,ψ),如圖 3.1。接下來將非集中質心坐標對者 y 軸逆 時針方向旋轉,此時旋轉的角度稱為俯仰角(Pitch angle,θ),然後對 x 軸方向逆 時針旋轉,此時旋轉的角度稱為側傾角(Roll angle,φ),最後對準的座標就回車心座標相同,但是 z 軸為垂直車體的方向,如圖 3.2。而座標間的轉換式如 3.1 式所示: 圖 3.1:路面座標系轉換成非集中質心座標系示意圖 圖 3.2:非集中質心座標系轉換成質心座標系示意圖 B
1 0 0 cos(θ) 0 - sin(θ) cos(ψ) sin(ψ) 0 E = 0 cos(φ) sin(φ) 0 1 0 -sin(ψ) cos(ψ) 0
0 - sin(φ) cos(φ) sin(θ) 0 cos(θ) 0 0
G E 1 (3.1)
3.2 集中質量系統
透過在 3.1 節所建立的座標系統就可以描述空間中六個自由度的運動,分別 是對著三個軸的旋轉運動與對三個軸的直線運動,根據三個軸的旋轉運動可以利 用尤拉運動方程式來分析車體運動的角度,而牛頓第二運動定律可以用來分析車 體的位置。車輛運動自由體圖如圖 3.3: φ φ ψ 質心座標 非集中質心座標θ
θ u y e u x e B y e B z e B x e ψ 路面座標 車胎座標 G z e eGy G x e u y e u x e u z e u z e圖 3.3:車體自由體圖
3.2.1 車輛旋轉運動
在車輛旋轉運動的部分,利用尤拉角的關係,可以將車體的旋轉運動用車體 座標來表示如式(3.2): x y z w = φ - ψsinθ w = θcosφ + ψcosθsinφ w = -θsinφ + ψcosθcosφ (3.2) 其中w 為車體座標上的側傾角速度;x w 為車體座標上的俯仰角速度;y w 為z 車體座標上的橫擺角速度。將(3.2)式微分後得到三個車體座標上的轉動角加速 度,如(3.3)式: G E u E B E 2 l l1 1 sb 2 sb h 1 2 3 4x y
z
w = φ - ψsinθ - ψθcosθ
w = θcosφ + ψcosθsinφ - θφsinφ - ψφsinθsinφ + ψφcosθcosφ w = -θsinφ + ψcosθcosφ - θφcosφ - ψφsinθcosφ - ψφcosθsinφ
(3.3) 車體的旋轉運動可以藉由尤拉運動方程式獲得,如(3.4)式,其中Mx,y,z為作 用在車體質心上的轉動力矩;Ix,y,z為車體座標系各軸上的轉動慣量。 x x x y z y z y y y z x z x z z z x y x y M = I w - (I - I )w w M = I w - (I - I )w w M = I w - (I - I )w w (3.4) 將(3.2)(3.3)式帶入(3.4)式做整理後得(3.5)式: z y x x x y x z y y φ - ψsinθ = I - I M
ψθcosθ + - (θcosφ + φcosθsinφ)(-θsinφ + ψcosθcosφ) I I
θcosφ + ψcosθsinφ =
M I - I
θφsinφ + ψθsinθsinφ - ψφcosθcosφ + - (φ - ψsinθ)(-θsinφ + ψ I I z y x z z cosθcosφ) -θsinφ + ψcosθcosφ = I - I M
θφcosφ + ψφsinθcosφ + ψφcosθsinφ + - (φ - ψsinθ)(θcosφ + ψcosθsinφ) I I
(3.5)
而其中Mx,y,z可以藉由分析作用在車體上有效的力與車輛參數便可獲得,如
1 x x1 y1 z1 1 x2 y2 z2 2 x3 y3 z3 1 x4 y4 z4 x1 y1 sb
M = (F sinθcosφ - F sinφ + F cosθcosφ) 2
sb
- (F sinθcosφ - F sinφ + F cosθcosφ) 2
sb
- (F sinθcosφ - F sinφ + F cosθcosφ) 2
sb
+ (F sinθcosφ - F sinφ + F cosθcosφ) 2 h + (F sinθsinφ + F 2 z1 x2 y2 z2 x3 y3 z3 x4 y4 z4 1 1 y1 cosφ + F cosθsinφ) h
+ (F sinθsinφ + F cosφ + F cosθsinφ) 2
h
+ (F sinθsinφ + F cosφ + F cosθsinφ) 2
h
+ (F sinθsinφ + F cosφ + F cosθsinφ) 2
sb h
+ (-l sinθ + cosθsinφ - cosθcosφ - (Z - z))F cosθ
2 2 1 1 y2 2 2 y3 2 2 y4 sb h
+ (-l sinθ - cosθsinφ - cosθcosφ - (Z - z))F cosθ
2 2
sb h
+ (l sinθ - cosθsinφ - cosθcosφ - (Z - z))F cosθ
2 2
sb h
+ (l sinθ + cosθsinφ - cosθcosφ - (Z - z))F cosθ
2 2 (3.6) y 1 x1 y1 z1 1 x2 y2 z2 2 x3 y3 z3 2 x4 y4 z4 x1
M = -l (F sinθcosφ - F sinφ + F cosθcosφ) - l (F sinθcosφ - F sinφ + F cosθcosφ) + l (F sinθcosφ - F sinφ + F cosθcosφ) + l (F sinθcosφ - F sinφ + F cosθcosφ)
h - (F cosθ - F 2 z1 x2 z2 x3 z3 x4 z4 1 1 x1 y1 1 1 h
sinθ) - (F cosθ - F sinθ) 2
h h
- (F cosθ - F sinθ) - (F cosθ - F sinθ)
2 2
sb h
- (-l sinθ + cosθsinφ - cosθcosφ - (Z - z))(F cosφ - F sinθsinφ)
2 2
sb h
- (-l sinθ - cosθsinφ - cosθcosφ - (Z - z))
2 2 x2 y2 2 2 x3 y3 2 2 x4 y4 (F cosφ - F sinθsinφ) sb h
- (-l sinθ - cosθsinφ - cosθcosφ - (Z - z))(F cosφ - F sinθsinφ)
2 2
sb h
- (-l sinθ + cosθsinφ - cosθcosφ - (Z - z))(F cosφ - F sinθsinφ)
z 1 x1 y1 z1 1 x2 y2 z2 2 x3 y3 z3 2 x4 y4 z4 1 1 x1 z1 x
M = l (F sinθsinφ + F cosφ + F cosθsinφ) + l (F sinθsinφ + F cosφ + F cosθsinφ) - l (F sinθsinφ + F cosφ + F cosθsinφ) - l (F sinθsinφ + F cosφ + F cosθsinφ)
sb sb - (F cosθ + F sinθ) + (F 2 2 2 z2 2 2 x3 z3 x4 z4 1 1 x1 y1 1 1 x2 y2 cosθ + F sinθ) sb sb
+ (F cosθ + F sinθ) - (F cosθ + F sinθ)
2 2
sb h
+ (-l sinθ + cosθsinφ - cosθcosφ - (Z - z))(F sinφ + F sinθcosφ)
2 2
sb h
+ (-l sinθ - cosθsinφ - cosθcosφ - (Z - z))(F sinφ + F sinθcosφ)
2 2 2 2 x3 y3 2 2 x4 y4 sb h
+ (l sinθ - cosθsinφ - cosθcosφ - (Z - z))(F sinφ + F sinθcosφ)
2 2
sb h
+ (l sinθ + cosθsinφ - cosθcosφ - (Z - z))(F sinφ + F sinθcosφ)
2 2 (3.8)
其中l 為車體質心到前輪之長度,1 l 為車體質心到後輪之長度;2 sb 為車輛1
前輪輪距,sb 為車輛後輪輪距。h 車輛高度,Z 為非集中質心座標上車體質心2
初始位置,z 為非集中質心座標上車體質心位置變化量。F 為集中質心座標上的xi
帄行車身縱向力,F 為集中質心座標上的垂直車身側向力,yi F 為集中質心座標zi
上的正向力,i=1 時為左側前輪,i=2 時為右側前輪,i=3 為右側後輪,i=4 為左 側後輪。在將對三個軸的旋轉角度與角速度當成車輛動態方程式的動態,如(3.9) 式: 1 X = [φ ψ θ φ ψ θ] (3.9)
3.2.1 車輛直線運動
車輛直線運動的部分,在此是利用牛頓第二運動定律推導得知,如(3.10)式:
4 w w v x v xi i=1 4 w w v y v yi i=1 4 v z v zi v i=1 m a = m (x - y ψ) = F m a = m (y + x ψ) = F m a = m (z) = F - m g (3.10) 其中m 為車體質量,v ax,y,z是在非集中質心座標上的三個方向上的加速度,g 為重力加速度。在此將非集中質心座標上的三方向位移, w w w y z x , , 與速度當成 車體動態方程式的狀態,如(3.11)式: w w w w w w 2 X =[x y z x y z ] (3.11)3.3 非集中質量系統
車輛的非集中質量系統主要分為轉向系統、車胎系統、懸吊系統,在此小節 將每個部份分開討論。3.3.1 轉向系統
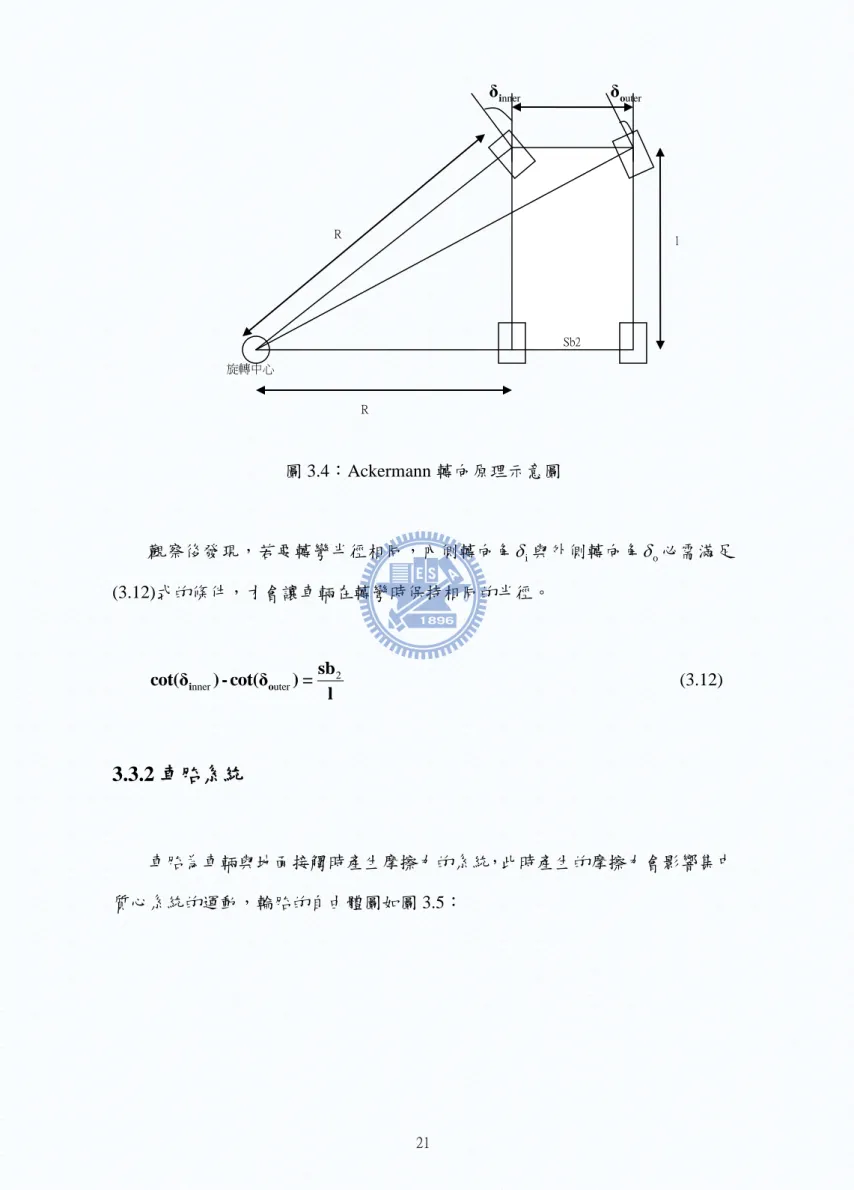
根據 Ackermann 轉向原理,車輛在轉向時為了保證車輛是繞著同一個圓心 作旋轉,所以車輪轉動的角度內外側並不相同,所以 Ackermann 提出了內外輪 轉角的不同,可以保證車輛在旋轉時為繞著同一圓心旋轉,如圖 3.4:圖 3.4:Ackermann 轉向原理示意圖 觀察後發現,若要轉彎半徑相同,內側轉向角i與外側轉向角o必需滿足 (3.12)式的條件,才會讓車輛在轉彎時保持相同的半徑。 2 nner uter i o sb cot(δ ) - cot(δ ) = l (3.12)
3.3.2 車胎系統
車胎為車輛與地面接觸時產生摩擦力的系統,此時產生的摩擦力會影響集中 質心系統的運動,輪胎的自由體圖如圖 3.5: l Sb2 旋轉中心 R l R l nner i δ δouter圖 3.5:輪胎自由體圖 依照向量的概念,將帄行輪胎的力F 與垂直輪胎的力a F 分解成帄行車身的b 力F 與垂直車身的力x F ,如(3.13)式: y xi ai i bi i yi ai i bi i F = F cos(δ ) - F sin(δ ) F = F sin(δ ) + F cos(δ ) (3.13) (3.13)式中帄行輪胎的力F 與垂直輪胎的力a F 是利用一組非線性的模型來描b 述,此模型是 Pacejka[9]所提出的“Magic formula”,在此非線性的輪胎模型帄行 輪胎的力F 會與滑動比(Slip ratio)有一非線性的關係,在垂直輪胎的力a F 與側滑b 角(Slip angle)間也會有一非線性的關係存在,而輪胎所受之正向力F 也會影響輪z 胎受力的大小。此模型如(3.14)式: -1 -1 a x x x r x x r x r
F = D sin{C tan [B s - E (B s - tan (B s )]}
車頭方向 Fx Fy Fa Fb δ
其中s 為滑動比,r α 為側滑角,Bx,y、Cx,y、Dx,y、Ex,y為輪胎參數。 在車輛行駛中,輪胎會承受負載使輪胎變形,此時輪胎的半徑就不會保持原 來的半徑。形變量除了會與輪胎所受之正向力有關,也會跟輪胎胎壓,表面材質 有關,在此就簡單假設輪胎有一彈力常數,當正向力越大,輪胎形變越大,如(3.15) 式: zi ei i wheel F r = r -K (3.15) ei r 為車輛輪胎的等效半徑;r 為車輛輪胎真實半徑;i Kwheel為輪胎彈力常數; zi F 為輪胎所受之正向力。 側滑角α 為輪胎轉動方向與速度方向之間的夾角,如(3.16)式,圖 3.6,此物 理量會影響作用在輪胎上的側向力。 車頭方向 δ
φi i i i -1 1 -1 1 1 -1 1 -1 2 1 -1 2 -1 3 2 -1 2 -1 4 2 α = δ - β - k φ sb β = tan ((y + l ψ)(x - ψ) ) 2 sb β = tan ((y + l ψ)(x + ψ) ) 2 sb β = tan ((y - l ψ)(x + ψ) ) 2 sb β = tan ((y - l ψ)(x - ψ) ) 2 (3.16) 其中α 是第 i 個輪胎的側滑角,i β 為速度方向與車身的夾角。另外側傾角的i 大小會壓迫輪胎或將輪胎抬起,進而影響側滑角,所以k 是用來描述再車輛有側i 傾時,內外側輪胎測滑角與側傾角間的關係,如圖 3.6 的描述可以發現,車輛轉 彎時會有一側傾角φ出現,此側傾角會影響輪胎的側滑角,此時右側輪的側滑角 會因為φ為正值而變大,左側會因為φ為負值而減小。 滑動比s 是用來描述輪胎前進速度與車輛前進速度的差值比,如(3.17)式: r ei i i i ri ei i i i 2 2 1 1 1 2 2 1 2 1 2 2 2 3 2 2 2 2 4 2 r ω - V cosα s = max{r ω , V cosα } sb V = (x - ψ) + (y + l ψ) 2 sb V = (x + ψ) + (y + l ψ) 2 sb V = (x + ψ) + (y - l ψ) 2 sb V = (x - ψ) + (y - l ψ) 2 (3.17) 其中V 為第 i 個輪胎的前進速度。 i
接著來看輪胎在縱向的受力情形。輪胎會受到引擎帶動而有一個加速的力 矩,另一方面如果駕駛者踩煞車就會產生減速力矩,分析圖 3.7 的輪胎縱向自由 體圖可以藉由力矩帄衡推導出(3.18)式。 圖 3.7:輪胎縱向自由體圖 w i m b ei ai I ω = (T - T ) - r F (3.18) m T 為加速力矩,T 為煞車力矩,b I 為輪胎轉動慣量,w ω 為第 i 個輪胎的轉i 動加速度。在此將四個輪胎的轉動速度當成車輛動態方程式的狀態之一,如式 (3.19): 3 1 2 3 4 X = [ω ω ω ω ] (3.19)
3.3.3 懸吊系統
Tb Tm e r a F z F懸吊系統為連結車輛輪胎與車體集中質心的裝置,在此假設懸吊在車體集中 質心與輪胎間是一個彈簧與阻泥的系統,如圖 3.8,其中彈簧被設計成一非線性 彈簧,主要的目的是在於使用線性彈簧的話,有時候會因為轉向側傾角過大,而 使懸吊的彈簧有太大的伸長量,一般正常的車輛是不會有彈簧無限延伸的情況出 現,若使用此非線性彈簧,就能夠保證車輛在有翻覆現象時,被抬起方面的輪胎 會在彈簧伸長到一定的長度後,因為彈力係數減小而不再伸長;反之另一側被壓 縮的輪胎會因為彈簧被壓縮到極限而不會再減短,此非線性彈簧的設計就是直接 限制了懸吊的伸長量,此限制就可以讓車輛在行駛中不會有使用線性彈簧時過大 的翻覆現象,利用此非線性彈簧能使車輛模型更貼近真實的車輛。 圖 3.8;懸吊系統自由體圖 在分析懸吊系統的力帄衡方程式,可以堆導出(3.20)式: w m g K D Fz H
i i
2 i 3 zi i i i w 4 i i=1 c (H -c ) i 1 i i w i i w i i w F = K H + D H + m g 1 z = H 4 K = C e H , for H - m g/K H = -m g/K for H - m g/K (3.20) 其中C 、1 C 、2 C 為非線性彈簧係數,3 D為阻泥係數,H為彈簧伸長量, H 為彈簧伸長速度,m 為車輛輪胎質量,w F 為正向力。彈簧的伸長量與伸長速度zi 可以利用車體運動的狀態來求得,如(3.21)(3.22)式: 1 1 1 1 2 1 2 3 2 2 4 2 sb H = -z + l sinθ - cosθsinφ 2 sb H = -z + l sinθ + cosθsinφ 2 sb H = -z - l sinθ + cosθsinφ 2 sb H = -z - l sinθ - cosθsinφ 2 (3.21) 1 1 1 1 2 1 1 3 2 1 4 2 sbH = -z + l θcosθ + (θsinθsinφ - φcosθcosφ) 2
sb
H = -z + l θcosθ - (θsinθsinφ - φcosθcosφ) 2
sb
H = -z - l θcosθ - (θsinθsinφ - φcosθcosφ) 2
sb
H = -z - l θcosθ + (θsinθsinφ - φcosθcosφ) 2
(3.22)
綜合以上的分系與推導,再把所有的狀態結合寫成一非線性動態方程式,如 (3.24)式,其中輸入為δinner,T ,m T 。 b T 1 2 3 4 inner m b X = [X X X X ] X = f(X, δ , T , T ) (3.24)
第四章 摩擦力估測演算法
本章為此研究中的主要部份,分為輪胎受力的估測與車輛參數的估測。前半 部會介紹摩擦力估測的演算法,在縱向力的部份是利用輪胎力矩帄衡的公式來直 接推得縱向力;側向力的部份會使用簡化的車輛動態模型或腳踏車模型來求解, 求解模型的切換會依據轉向角的大小當成切換的依據;利用模型求解沒有辦法將 所有輪胎個別的摩擦力解出,所以最後再使用輪胎摩擦力圓的特性來解得各個輪 胎所受的側向力。在此摩擦力估測的演算法中,車輛模型的參數會對估測結果的 有很大影響,所以在後半部的章節中會利用期望值最大化演算法(EM algorithm) 來做參數估測。而最後會有各種不同的駕駛狀況下的摩擦力估測與不確定參數估 測的模擬結果。完整流程圖如圖 4.1: 圖 4.1:摩擦力估測流程圖 車輛模型 摩擦力圓 簡化車輛模型 腳踏車模型 不確定參數估測 權重 縱向力估測 b F a F b m T T 、 、 z v s、 、I m org [Fb1、 、Fb2 F + Fb3 b4] b1 b2 b3 b4 F、 、F F + F b F a F bicy [Fb1、 、Fb2 F + Fb3 b4]4.1 摩擦力估測
4.1.1 縱向力估測
回顧(3.18)式,假設式中的煞車力矩、加速力矩、輪胎轉動速度都可以得知, 將(3.18)式移項整理後,並將等效輪胎半徑用未形變前的輪胎半徑代入,可得(4.1) 式: -m b w i ai i (T - T ) I ω F = r (4.1) 其中的轉動加速度項,可以透過速度項差分得知。 + i ω 為此刻時間點的輪胎 轉動速度, -i ω 為上一刻時間點的輪胎轉動速度,Δt為取樣時間,則輪胎之轉動 加速度可以用(4.2)式近似之: = + -i i i ω - ω ω Δt (4.2) 將(4.2)式代入(4.1)式就可以得到(4.3)式的縱向力估測方程式: - ( ) ˆ + -i i m b w i ai i ω - ω (T - T ) I Δt F = r (4.3)4.1.2 側向力估測
側向力的估測會與車輛集中質量的動態有關,首先建立描述車輛運動的簡化 車體模型,此簡化模型忽略了車輛的俯仰跟側傾,只考慮車輛 X-Y 帄面的運動, 簡化車輛自由體圖如圖 4.2: 圖 4.2:簡化車輛自由體圖 依據市面上廣泛使用的三軸加速規,可以很容易的得知三個方向的加速度, 而陀螺儀可以量測橫擺角速度,也可以使用全球定位系統(GPS)來判斷質心的位 置與移動速度,以下將這些感測器可提供的資訊當成已知。 根據牛頓第二運動定律可以推得 X 方向與 Y 方向的直線運動方程式,如(4.4) 式:
4 x xi i=1 4 y yi ma = F ma = F (4.4) x1 F x2 F x3 F x4 F y2 F y4 F Fy1 y3 F x a y a r 1 l 2 l s再將(3.13)式中對輪胎的作用力代入(4.4),並且假設後輪轉向角為零度,就 可得(4.5)式: 1 1 2 2 1 1 2 2 x a1 b1 a2 b2 a3 a4 y a1 b1 a2 b2 b3 b4
ma = F cos(θ ) - F sin(θ ) + F cos(θ ) - F sin(θ ) + F + F
ma = F sin(θ ) + F cos(θ ) + F sin(θ ) + F cos(θ ) + F + F (4.5)
力矩帄衡的部份只考慮橫擺的部份,可以根據圖(4.2)的有效作用力列出力矩 帄衡方程式,如(4.6)式: z z I r = M (4.6) 其中I 為轉動慣量,s 為質心偏移,在此假設質心只有 x 方向的偏移,偏向z 車頭為正,偏向車尾為負,r為橫擺角加速度,M 如下: z 1 2 z y1 y2 1 y3 y4 2 x2 x1 x3 x4 sb sb M = (F + F )(l - s) - (F + F )(l + s) + (F - F ) + (F - F ) 2 2 (4.7) 將(3.13)(4.7)式代入(4.6)式整理得(4.8)式: 1 1 2 2 2 2 1 + 1 z a1 b1 a2 b2 1 b4 b3 2 1 2 a2 b2 a1 b1 a3 a4
I r = (F sin(θ ) + F cos(θ ) + F sin(θ ) + F cos(θ ))(l - s) - (F + F )(l + s) sb sb
(F cos(θ ) - F sin(θ ) - F cos(θ ) + F sin(θ )) + (F - F )
2 2
(4.8)
(4.5)(4.8)式中的縱向力F 已經由輪胎的力矩帄衡求得,可代入(4.3)的結果,ai
另外縱向加速度a 與側向加速度x a 為已知,橫擺角加速度y r可以利用橫擺角速度
b AF = b (4.9) 其中 A ,F , b 如下: b 1 2 1 2 - sin(θ ) - sin(θ ) 0 0 A = cos(θ ) cos(θ ) 1 1 cos 1 1 2 2 1 2 1 1 2 2 sb sb
(θ )(l - s) + sin(θ ) cos(θ )(l - s) - sin(θ ) - (l + s) - (l + s)
2 2 ˆ ˆ ˆ ˆ T b b1 b2 b3 b4 F = F F F F 1 2 1 2 1 2 2 1 ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ x a1 a2 a3 a4 y a1 a2 1 2 z a1 a2 1 a2 a1 a3 a4 ma - F cos(θ ) - F cos(θ ) - F - F b = ma - F sin(θ ) - F sin(θ ) sb sb
I r - (F sin(θ ) + F sin(θ ))(-l + s) - (F cos(θ ) - F cos(θ )) - (F - F )
2 2 (4.9)的線性方程式中未知數比有效的方程式來的多,但是觀察可以發現 A 矩 陣最後兩行相同,所以可以將(4.9)式改寫成(4.10)式的形式: b AF = b (4.10) 其中A、F 如下: b 1 2 1 2 1 1 1 1 - sin(θ ) - sin(θ ) 0 A = cos(θ ) cos(θ ) 1 sb cos(θ )(l - s) + sin(θ ) cos
2 2 2 2 1 2 sb (θ )(l - s) - sin(θ ) - (l + s) 2 ˆ ˆ ˆ ˆ ˆ ˆ ˆ T T b b1 b2 b3 b4 b1 b2 rear F = F F F + F = F F F
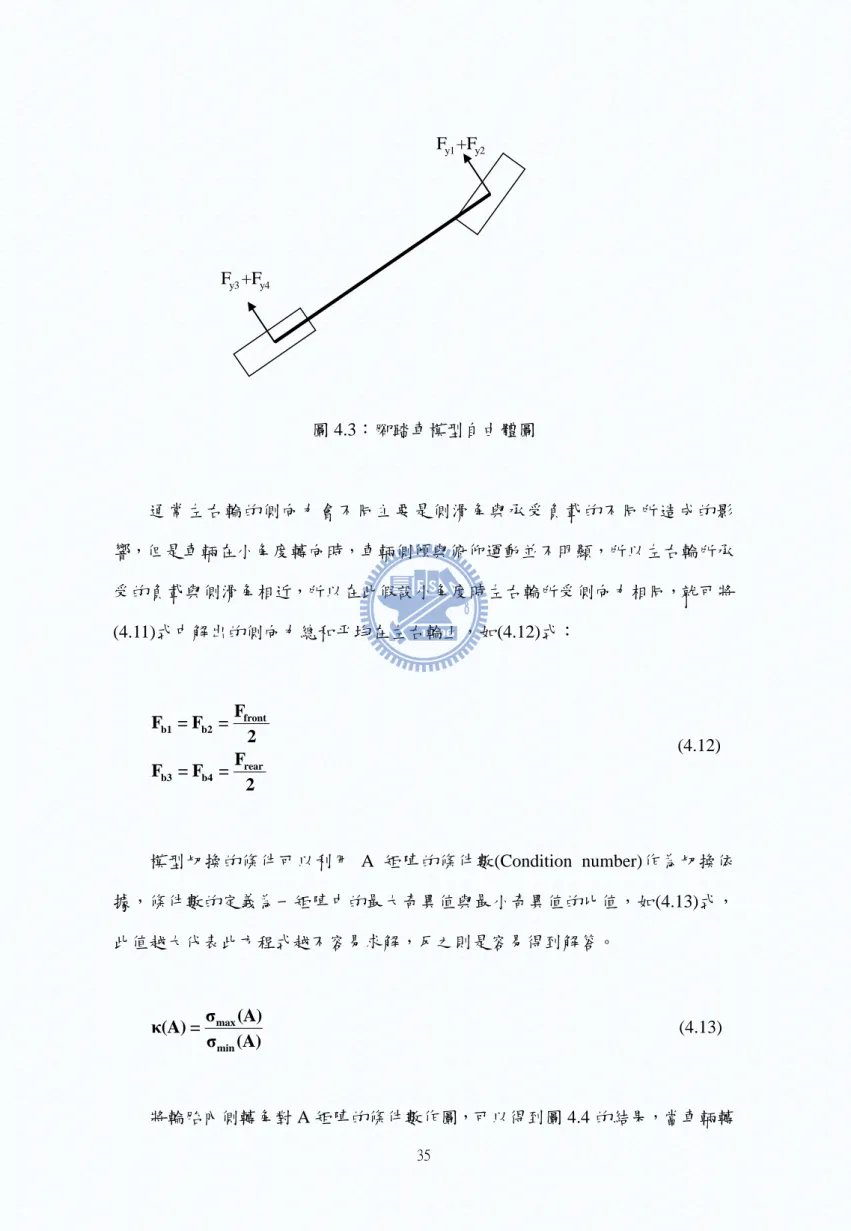
(4.10)中 A 矩陣裡的元素跟車輛的轉向角有關,當轉向角很小或轉向角很小 時,A 矩陣中的第一行與第二行會變的非常相近或相等,此時 A 矩陣成為一奇 異矩陣,造成(4.10)所解出的側向力不正確,所以在小角度時要分開討論。當轉 向角較大時,(4.10)為滿秩的線性聯例方程式,左右兩邊同時乘上 -1 A 就可以求得 b F 之值。 當轉向角很小時,假設sin(θ) θ 0,cos(θ)1,內外輪轉角相等的情況下 來簡化(4.10)式,如(4.11)式。 b AF = b (4.11) 其中 A ,F , b 如下: b 1 1 A = (l -s) -(l +s) 1 2 y z ma b = I r T T F = [F + F F + F ] = [F F ] b b1 b2 b3 b4 front rear (4.11)式中已經假設車輛的車寬為零,左右輪的力都作用在同一個點上,若 將此模型的自由體圖畫出來,就可以發現這是一般常用的腳踏車模型,在腳踏車 模型中前後輪的受力會假設成車輛前後側的左右輪受力的總和,所以在(4.11)式 中的 F b項也反映了此假設,如圖 4.3。
圖 4.3:腳踏車模型自由體圖 通常左右輪的側向力會不同主要是側滑角與承受負載的不同所造成的影 響,但是車輛在小角度轉向時,車輛側傾與俯仰運動並不明顯,所以左右輪所承 受的負載與側滑角相近,所以在此假設小角度時左右輪所受側向力相同,就可將 (4.11)式中解出的側向力總和帄均在左右輪上,如(4.12)式: front b1 b2 rear b3 b4 F F = F = 2 F F = F = 2 (4.12) 模型切換的條件可以利用 A 矩陣的條件數(Condition number)作為切換依 據,條件數的定義為一矩陣中的最大奇異值與最小奇異值的比值,如(4.13)式, 此值越大代表此方程式越不容易求解,反之則是容易得到解答。 max min σ (A) κ(A) = σ (A) (4.13) y1 y2 F +F y3 y4 F +F
向角很小時,A 矩陣的條件數很大,隨著角度的增大 A 矩陣的條件數會慢慢減 小,為了避免模型切換時估測出的摩擦力有不連續的現象,所以利用條件數當成 權重來帄滑估測的結果。 圖 4.4:A 矩陣條件值示意圖 在此假設兩個權重,一個是隨著轉向角改變的 A 矩陣條件數,另外一個是 固定角度下的 A 矩陣條件數,此權重的選擇會決定比較相信簡化車輛模型的解, 或是相信腳踏車模型的解。 ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ 1 2 δ=constant ' 1 1 1 2 ' 2 2 1 2 ' ' b 1 b,org 2 b,bicy T b,org b1 b2 b3 b4 org T b,org b1 b2 b3 b4 bicy 1 g = κ(A) 1 g = κ(A ) g g = g + g g g = g + g F = g F + g F F = F F F + F F = F F F + F (4.14)
的側向力,也就是(4.10)解出的側向力,Fb,bicy為腳踏車模型解出的側向力,為 (4.11)(4.12)解出的側向力。 權重g 的值會隨著轉向角的不同而有所改變,當轉向角越小時,A 矩陣的條1 件數越大,而權重g 就越小,反之轉向角越大時,A 矩陣的條件數越小,權重1 g1 就越大。而相互比較的權重g 選在條件值較大的地方,原因是因為在轉向角大2 時,簡化車輛模型解出來的摩擦力遠比腳踏車模型解出來的準確,此假設會讓 ' 1 g 接近於一, '2 g 接近於零,也就是說車輛轉向角大時會相信簡化車輛模型解出的 側向力;反之小角度時 ' 1 g 、g 與角度大時的結果剛好相反,也就是說轉向角小2' 時比較相信腳踏車模型的解。
4.1.3 摩擦力圓
4.1.2 節中利用兩種車輛模型皆無法解出後輪輪胎的個別的側向力,所以在 此引入輪胎本身具有的特性之ㄧ,也就是摩擦力圓的概念,此摩擦力圓就是在描 述輪胎在轉向時,縱向力與側向力間的關係,此特性可以用來求解輪胎個別的摩 擦力。 依照摩擦力的定理,任何作用在輪胎上的側向力與縱向力都必定滿足摩擦力 圓的限制,如(4.15)式,亦即輪胎的側向力與縱向力是互相牽制的,換句話說就 是輪胎與地面間接觸的水帄方向合力,都只會落在摩擦力圓內,如圖 4.4: 2 2 y x F F + = 1 (4.15)圖 4.5:摩擦力圓示意圖 其中Fx、F 為輪胎能提供的最大最縱向與側向摩擦力,就是指輪胎只進行y 完全直線的移動或是完全側向的移動時,地面能提供給輪胎最大的摩擦力。最大 縱向力會與負載、滑動比、地面摩擦係數有關,而最大側向力會與負載、側滑角、 地面摩擦係有關,如(4.16)式: 1 2 F = f (s , F , μ) x r z F = f (α, F , μ) y z (4.16) 首先假設車輛的四個輪胎都是同時進入相同的路面,所以接觸到的地面摩擦 係數μ 皆相同,也就是說最大縱向力與最大側向力可以忽略 μ 的影響。根據正向 力與側滑角,與正向力與滑動比的關係圖,見圖 2.8,可以發現在線性區時,正 向力的影響並不大,所以正向力的比值可以利用相似三角形的概念,利用側滑角 x F y F z F
圖 4.6:(左)側滑角與最大側向力與正向力之關係圖、(右)滑動比與最大縱向力與 正向力之關係圖 一般轎車重心較低,故行駛時,側傾效應會比俯仰效應來的明顯,所以在此 假設前後輪的最大縱向力相同,又根據圖 4.5 中線性區中的比例關係,將四個輪 胎的最大縱向力與最大側向力做(4.17)式的假設,目的是為了減少變數的數目, 目前加上摩擦力圓的最大縱向力與與最大側向力後,再加上未知的輪胎側向力, 總共有 12 個變數,但是只有 7 條有效方程式,(4.17)的假設可以將有效方程式增 加到 13 條,加上利用橢圓聯立方程式的解題技巧,就可以將所有的未知變數解 出。 x F s r 1 2 y2 F r2 s r1 s x2 F x1 F y1 F y F F z2 z1 F z2 F z1 F
1 2 3 4 F = p F a2 a1 F = p F a3 a4 F = p F b2 b1 F = p F b3 b4 F = F a2 a3 F = F a1 a4 (4.17) 其中p 為前輪左右輪的滑動比的比值,1 p 為後輪左右輪的滑動比的比值,2 p3 為前側左右輪的側滑角比值,p 為後側左右輪的側滑角比值,如(4.48)式: 4 2 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 3 3 3 3 3 3 3 3 2 1 1 1 1 1 1 1 1 2 2 1 2 1 2 2 1 1 1 2 2 3 r ω - V cosα max{r ω , V cosα } p = r ω - V cosα max{r ω , V cosα } r ω - V cosα max{r ω , V cosα } p = r ω - V cosα max{r ω , V cosα } sb V = (x + ψ) + (y + (l - s)ψ) 2 sb V = (x - ψ) + (y + (l - s)ψ) 2 sb V = (x + ψ) + ( 2 -1 1 -1 2 1 -1 1 -1 1 1 2 2 2 2 2 4 2 3 -1 2 -1 2 4 -1 2 -1 2 sb δ - tan ((y + (l ψ)(x - ψ) ) 2 p = sb δ - tan ((y + (l ψ)(x + ψ) ) 2 y - (l + s)ψ) sb V = (x - ψ) + (y - (l + s)ψ) 2 - s) - s) sb -tan ((y - (l + s)ψ)(x + ψ) ) 2 p = sb -tan ((y - (l + s)ψ)(x - ψ) ) 2 (4.18) (4.18)式的側滑角忽略了(3.16)式的側傾對側滑角影響,主要是因為在側傾
有了以上這些關係後,就可以分析四個輪胎的摩擦力圓特性,先將四個輪 胎的摩擦力圓列出,如(4.19)式: 2 2 a1 b1 a1 b1 2 2 a2 b2 a2 b2 2 2 a3 b3 a3 b3 2 2 a4 b4 a4 b4 F F + = 1 F F F F + = 1 F F F F + = 1 F F F F + = 1 F F (4.19) 藉由先前已解得的左右輪側向力與縱向力可以利用橢圓聯立方程式求 解。假設左前輪的最大摩擦力如(4.20)式,並且代入右前輪的摩擦力圓關係式, 可以整理成(4.21)式: a1 a1 b1 b1 1 1 = sin(ξ) F F 1 1 = cos(ξ) F F (4.20) 1 3 2 2 2 2 2 2 a2 b2 2 2 a1 b1 sin (ξ) + cos (ξ) = 1 F F 1 1 sin (ξ) + cos (ξ) = 1 p F p F (4.21) (4.21)式中左前輪摩擦力圓成為三角恆等式,右前輪的部份可以加以整理 得到(4.22)式的結果,代入(4.20)式後就可解得左前輪的最大側向力與最大縱向