國立交通大學
機械工程學系
碩士論文
表面親疏水性與毛細效應對 Y 字型微流道中流體流動與包
覆氣泡現象影響之研究
Influence of liquid hydrophobicity and capillary effect on
encapsulated air bubbles in microchannels with Y type
研 究 生:黃文錚
指導教授:林振德
表面親疏水性與毛細效應對 Y 字型微流道中流體流動與包覆氣泡現 象影響之研究
Influence of liquid hydrophobicity and capillary effect on encapsulated air bubbles in microchannels with Y type
研 究 生:黃文錚 Student:Wen-Jeng Huang 指導教授:林振德 Advisor:Prof. Jenn-Der Lin
國 立 交 通 大 學 機械工程學系
碩 士 論 文
A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Mechanical Engineering July 2011
Hsinchu, Taiwan, Republic of China 中華民國壹佰年七月
i 表面親疏水性與毛細效應對 Y 字型微流道中流體流動與包覆氣泡現 象影響之研究 研究生:黃文錚 指導教授:林振德 中文摘要 本研究針對一Y 字型微流道之流體流動,透過數值模擬與實驗觀 察來探討流體慣性力、表面張力、流道壁面附著力與流道幾何參數對 流體流動與流體新月形波前包覆氣泡現象之影響。我們利用微機電系 統之概念和製程技術,設計出幾何參數不同的Y 字型微流道裝置,藉 由觀測及分析液體於不同流動條件下,在精心設計之流道內流動之現 象。 為了歸納出流體新月形波前包覆氣泡現象之主要影響因素,本 研究我們選取的參數有:入口流體流量、流道壁面親疏水性、流道深 寬比與流道夾角。數值模擬部分我們採用商業化計算流體力學軟體 CFD-ACE+來進行;透過邊界條件給予液固接觸角以模擬不同親疏水性, 再利用流體體積-片段線性界面重建法來做液氣界面的時變追蹤,並 以連續表面力法來考慮表面張力的效應。 研究結果顯示,主要影響氣泡包覆現象之參數為夾角及接觸角。 其夾角越大越會產生氣泡包覆,且體積越大。接觸角越大越容易產生 氣泡包覆,氣泡體積也越大。深寬比越大造成波前之法線夾角的改變 與速度加快,使親水性案例氣泡體積增加。速度快會造成波前之動態
ii
接觸角稍微增加,使親水性案例氣泡體積增加。降低速度可以使波前 快速達到穩態,並且消除壁面角落因速度太快而造成的小氣泡。
iii
Influence of liquid hydrophobicity and capillary effect on encapsulated air bubbles in microchannels with Y type
Student: Wen-Jeng Huang Advisor: Prof. Jenn-Der Lin
ABSTRACT
This research purposes to study the physical phenomenon and fluid dynamics of microfluid having encapsulated air bubbles at advancing meniscus in the microchannel with Y type. The varying physical parameters include inlet mass flow rate, wetting conditions of microchannel walls, aspect ratio of microchannels, and angle formed by microchannels. The numerical simulation tool used in this study is the CFD-ACE+ commercial software produced by CFD Research Corporation. A VOF-PLIC interface tracking method is adapted to represent the fluid domain and to track the evolution of its free boundaries while CSF mode is choosed to model interfacial physics. According to the research result, the main parameters that affect the formation of encapsulated air bubble include inlet angle of micro-channels and wetting condation. The increase in the inlet angle will produce encapsulated air bubble with lager volume. The lager contact angle will easily come out with encapsulated air bubble with having lager volume. The lager aspect ratio will result in the change angle of meniscus
iv
normal line, faster the speed, and increase volume of air bubble for hydrophilic cases. Faster speed will step up dynamic wetting angle of meniscus slightly and volume of air bubble for hydrophilic cases. lower speed can make meniscus attain to steady state and eliminate the small air bubble on wall corner due to fast speed.
v
致謝
誠摯的感謝我的老師林振德教授,雖然放我們自由的學習和研究, 但是在適時的時候引導我,並且指引往正確的方向。雖然學生資質駑 鈍,您卻不厭其煩的導正我的觀念,使我在這些年中受益良多。老師 不只在研究上引導,不時更指導我們人生的態度,以及老師嚴謹的態 度更是我學習的典範。在此還要感謝口試委員吳志陽教授、許隆結教 授、蔡禎輝教授對本文所提供寶貴的意見,使論文更加完善。 在實驗室的生活中,感謝學長的指導,同學的勉勵,學弟的幫忙。 感謝賴志銘學長、涂文福學長在學術及研究上給予指導與經驗分享, 你們豐厚的專業知識總是能解開我們心中許多的疑惑。感謝學長陳志 豪、黃昌彥、鄭守焜、藍順隆、李偉民的技術傳承與不私的指導,你 們的指導總是使我受益良多。感謝我同屆的同學黃泰碩,你是我最能 傾訴心情的對象。感謝學弟陳駿傑、張凱涵非常大力的幫忙,在此要 特別感謝陳駿傑,實驗室大大小小的事情都由你處理,在論文實驗部 分都由你來幫忙,對你真是非常的感謝。還要感謝我的雙親,其中更 感謝母親在背後支持。vi
目錄
中文摘要...i 英文摘要...iii 致謝...v 目錄...vi 表目錄...ix 圖目錄...x 符號表...xiii 第一章 緒論 ... 1 1-1 前言 ... 1 1-2 微機電系統 ... 1 1-3 毛細現象 ... 2 1-4 文獻回顧 ... 5 1-5 研究目的與動機 ... 6 第二章 物理模式與數學模式 ... 8 2-1 物理模式 ... 8 2-2 數學模式 ... 8 2-2-1 流體區域 ... 8 2-2-2 固液氣界面 ... 10vii 2-2-3 時間步階 ... 12 2-2-4 壁面邊界條件... 13 第三章 軟體介紹與數值模擬方法 ... 14 3-1 軟體介紹 ... 14 3-1-1 CFD-GEOM 軟體 ... 15 3-1-2 CFD-ACE+軟體... 16 3-1-3 CFD-VIEW 軟體 ... 17 3-1-4 CFD-RC 軟體使用流程 ... 17 3-2 模擬方法 ... 17 3-2-1 前處理 ... 18 3-2-2 求解分析 ... 20 3-2-3 後處理 ... 21 第四章 結果與討論 ... 22 4-1 實驗比對 ... 22 4-2 模擬結果 ... 23 4-2-1 夾角對氣泡包覆的影響 ... 23 4-2-2 接觸角對氣泡及波前的影響 ... 24 4-2-3 深寬比對氣泡及波前的影響 ... 25 4-2-4 速度對氣泡及波前的影響 ... 27
viii 第五章 結論與未來展望 ... 29 5-1 結論 ... 29 5-2 未來展望 ... 30 參考文獻 ... 31 表附錄 ... 36 圖附錄 ... 43
ix
表目錄
表 2-1 固定之模擬參數 ... 36 表 2-2 改變之參數 ... 37 表 4-1(a) 所有案例參數 ... 38 表 4-1(b) 所有案例之參數 ... 39 表 4-2 改變夾角與接觸角之氣泡體積 ... 40 表 4-3 改變深寬比之氣泡體積 ... 41 表 4-4 改變速度之氣泡體積 ... 42x
圖目錄
圖 1-1 碎片型分歧管路系統示意圖 ... 43 圖 2-1 實驗系統 ... 43 圖 2-2 Y 字型微流道之設計 ... 44 圖 3-1 CFD-GEOM 操作畫面 ... 44 圖 3-2 CFD-ACE 操作畫面 ... 45 圖 3-3 CFD-VIEW 操作畫面 ... 45 圖 3-4 CFD-RC 的概要使用流程圖 ... 46 圖 3-5 建立 Y 字型流道之模型 ... 46 圖 3-6 21 萬網格與 26 萬網格之波前比較圖 ... 47 圖 3-7 21 萬、26 萬與 33 萬三種網格之氣泡大小與波前位置圖 ... 47 圖 3-8 CFL 值=0.22、0.15、0.1 下的位置及氣泡比對 ... 48 圖 4-1 不同夾角之幾何模型 ... 49 圖 4-2 實驗拍攝畫面... 50 圖 4-3 模擬畫面 ... 50 圖 4-4 模擬與實驗比對 ... 51 圖 4-5 夾角-接觸角-速度與氣泡包覆案例... 51 圖 4-6 案例 A2 不同時間點下流體行為 ... 52 圖 4-7 案例 A4 不同時間點下流體行為 ... 53xi 圖 4-8 案例 B2 不同時間點下流體行為 ... 54 圖 4-9 案例 B4 不同時間點下流體行為 ... 55 圖 4-10 案例 C2 不同時間點下流體行為 ... 56 圖 4-11 案例 C4 不同時間點下流體行為 ... 57 圖 4-12 夾角-接觸角案例包覆之氣泡體積圖 ... 58 圖 4-13 不同接觸角之波前形狀比較圖 ... 58 圖 4-14 案例 A4 之氣泡 ... 59 圖 4-15 案例 A5 之氣泡 ... 59 圖 4-16 案例 B3 之氣泡 ... 60 圖 4-17 案例 B4 之氣泡 ... 60 圖 4-18 案例 B5 之氣泡 ... 61 圖 4-19 案例 C2 之氣泡 ... 61 圖 4-20 案例 C3 之氣泡 ... 62 圖 4-21 案例 C4 之氣泡 ... 62 圖 4-22 案例 C5 之氣泡 ... 63 圖 4-23 案例 A1、A2、A3、A4、A5 波前接觸位置比較 ... 64 圖 4-24 案例 B1、B2、B3、B4、B5 波前接觸位置比較 ... 65 圖 4-25 案例 C1、C2、C3、C4、C5 波前接觸位置比較 ... 66 圖 4-26 案例 B3 不同時間點下流體行為 ... 67
xii 圖 4-27 案例 B3-1 不同時間點下流體行為 ... 68 圖 4-28 案例 B3-2 不同時間點下流體行為 ... 69 圖 4-29 案例 C2 不同時間點下流體行為 ... 70 圖 4-30 案例 C2-1 不同時間點下流體行為 ... 71 圖 4-31 案例 C2-2 不同時間點下流體行為 ... 72 圖 4-32 案例 A4、A4-1、A4-2 之接觸點波前比較圖 ... 73 圖 4-33 案例 B3、B3-1、B3-2 之接觸點波前比較圖 ... 74 圖 4-34 案例 C2、C2-1、C2-2 之接觸點波前比較圖 ... 75 圖 4-35 不同深寬比下氣泡體積變化 ... 76 圖 4-36 案例 B4、B4-1、B4-2 波前接觸點線段比較 ... 77 圖 4-37 案例 A4、A4-1、A4-2 匯流後波前比較圖 ... 77 圖 4-38 C4-2 案例之氣泡包覆 ... 78 圖 4-39 案例 C4-2 之流場向量圖 ... 79 圖 4-40 案例 B3-3 不同時間點下流體行為 ... 80 圖 4-41 案例 B3-4 不同時間點下流體行為 ... 81 圖 4-42 案例 C2-3 不同時間點下流體行為 ... 82 圖 4-43 案例 C2-4 不同時間點下流體行為 ... 83 圖 4-44 案例 A4、A4-3、A4-4 之波前位置變化圖 ... 84 圖 4-45 案例 B3、B3-3、B3-4 之波前位置變化圖 ... 84
xiii
圖 4-46 案例 B4、B4-3、B4-4 之波前位置變化圖 ... 85
圖 4-47 案例 C4、C2-3、C2-4 之波前位置變化圖 ... 85
圖 4-48 案例 B4、B4-3、B4-4 波前接觸點線段比較 ... 86
xiv
符號表
音速 體積函數 表面張力 單位面積力 g 重力加速度 馬赫數 n 法線 P 壓力 t 時間 u 流經某網格之速度 速度網格長度 μ黏滯係數 ρ密度 表面單位脈衝函數 下標 表面 流體
xv
1
第一章 緒論
1-1 前言
近年來,國內半導體產業睥睨所有高科技產業,其所帶動的經濟 效益有目共睹。隨著人們追求高品質的生活水準,短小輕薄、攜帶方 便的個人化高科技產品的發展已成為不可避免的趨勢。以電腦而言, 由桌上型發展到手提式、甚至掌上型,便是微小化的最佳案例;至於 如何能將產品規格愈做愈小,精密度卻愈來愈高,便是微機電系統技 術和應用的研發範圍。1-2 微機電系統
微機電系統(Micro Electro-Mechanical System, MEMS)[1,2] 是一種結合機械、電子、材料、控制、物理、生醫、化學、光學等多 重技術整合的研發領域,其特色為兼具微小化、可量產之新製造技術, 不僅可有效協助製造業改善製程,使產品提高品質、性能與可靠度, 進而提高附加價值,同時可降低製造成本及能源消耗;因而成為目前 科技界人士公認為最具發展潛力及前瞻性的研究領域。微機電技術[3] 主要是以矽、玻璃或其他所需之材料作為晶片基材,並運用既有的微 結構細微加工及蝕刻技術於基材,使產品微小化,並廣泛運用於資訊、
2 電子、無線通訊、生化等產業。 就微流體系統(Micro-Fluidics system)而言,是將小至幾個微 升(microliter)甚至奈升(nanolilter)體積的液體,導入佈滿微流道 的晶片中,以某種驅動裝置或機械式幫浦(pump),讓液體在微流道中 執行混合[4,5]、分離[6]、加熱[7]、或聚合酶鏈反應(polymerase chain reaction, PCR) [8]等實驗室所用的反應,且廣泛地應用在化 學分析、生物科技、製藥或流場觀測等方面。然而,液體在微流道中 流動之現象會因流體種類及速度、外力作用、流道之表面粗糙度,幾 何形狀及尺寸的改變而不同,對於微流體系統運作之效果有決定性的 影響。因此,分析液體在微流道中流動之現象,進而達到妥適控制微 流體的輸送現象便成為一項相當重要的課題。
1-3 毛細現象
毛細現象於19 世紀即有科學家開始研究,因受到實驗和技術能 力的限制進展有限,直到近代才對這方面的問題有較進一步的突破與 了解[9]。對於傳統大尺寸的管流而言,在絕大多數之情形下,可以 將毛細作用之影響忽略而不會使分析結果失真,但在微尺寸管流中, 因慣性力相對變很小,使得管壁與液體間之作用力足以影響液體在管 內的流動現象。在微流體系統中,多數情形下毛細作用亦可用來當作3 使液體流動之驅動力,例如:漸縮管徑、局部加熱或改變管壁對於液 體之潤濕性(wettability)等皆可使液體產生自發性的流動,進而使 得微流體裝置能更有效率地運作[10,11]。因此,要使毛細作用在微 流體裝置內成為能夠被吾人所利用之機制,首先需將有可能影響毛細 作用之參數加以分析、釐清並歸納出主要參數;進而,我們利用這些 參數作為設計微流體裝置之依據,使其能快速且有效地達到設計目 標。 迄今,有關毛細作用之流動現象的研究方面,絕大多數係針對表 面張力、附著力或表面潤濕性,從固、液、氣間界面作用力(surface force)產 生 之 表 面能 (surface energy)所 導 致 的 壓 力 差(laplace pressure)為理論基礎,來探討單種流體在毛細管中之新月形波 (meniscus front)的變化或不同種類流體在其接觸壁面因毛細作用 之影響所產生的流動現象[12-14]。在慣性力作用極低的情況下,附 著力、表面張力、黏滯力的作用變得格外重要,尤以附著力較為複雜 且需深入探討[15]。在描述附著力方面,當流體界面與壁面接觸時, 因為流體分子與壁面分子的引力不同,所以流體界面與壁面會呈現特 定夾角,即所謂接觸角(wetting angle);而且,接觸角是表面潤濕 性(wettability)的一個重要指標。當流體表面與固體表面接觸時, 若接觸角大於90°,液體並不潤濕固體表面,此一情形稱之為疏水性
4 (hydrophobicity),相反的,若接觸角小於90°,液體潤濕固體表面, 則稱為親水性(hydrophility)。親水性對低流速的流動流體而言,可 降低流體推動的驅動壓力,所代表的意義好比是驅動力(driving force);疏水性則是代表壁面存在一個阻力的意義[16]。此外,在研 究量測接觸角的文獻方面,可分為靜態(statics)及動態(dynamics) 接觸角兩種,靜態接觸角的研究方面,是將單種液滴置於基材表面, 液滴與基材表面間之界面能達熱平衡(thermodynamic equilibium) 後,再根據楊氏方程式(Young equation)為理論基礎,利用固體-氣 體、固體-液體及氣體-液體之界面能之關係來求得接觸角[17、18]。 而動態接觸角的研究指的是單種流體或液滴在毛細管道中以不同驅 動力使其穩定流動,而流動之液體或液滴與毛細管壁間,因液體黏滯 力與異類分子間相互作用力達平衡後,液-氣界面與管壁間所形成之 角度即動態接觸角。根據文獻[19]記載,當慣性力與重力之效應可忽 略的前提下,流體在毛細管中流動可分作兩種情形:預先潤濕之毛細 管(prewetted tube)與乾燥之毛細管(dry tube),由於兩者在流動過 程中,分子間作用力情況並不相同,所得的動態接觸角有所不同,無 論是預先潤濕或乾燥之毛細管,動態接觸角與毛細係數(capillary number)都有著重要的關係,因此,找出正確的動態接觸角與毛細係 數之間的數值關係為目前研究動態接觸角所著重的目標。而在模擬過
5 程中,接觸角亦決定了流體流動時其流體界面之正確形狀;因此,對 於慣性力、附著力、表面張力以及黏滯力的影響,會間接反應到動態 接觸角,因而觀察動態接觸角的變化,便成為毛細流動現象之研究上 不可或缺的一環。除了上述各種力對流動會產生影響外,毛細管截面 幾何形狀的改變[20,21]以及壁面粗糙度[22]的影響,使得毛細壓力 有所不同,進而造成流動現象的改變。從論文結果[23],發現波前新 月型流動現象的改變與慣性力、附著力、液-氣間界面作用力、截面 積的改變都有密切的關係,但分析中沒加入更多的工作流體及設計條 件以比較出影響流動之主要參數。
1-4 文獻回顧
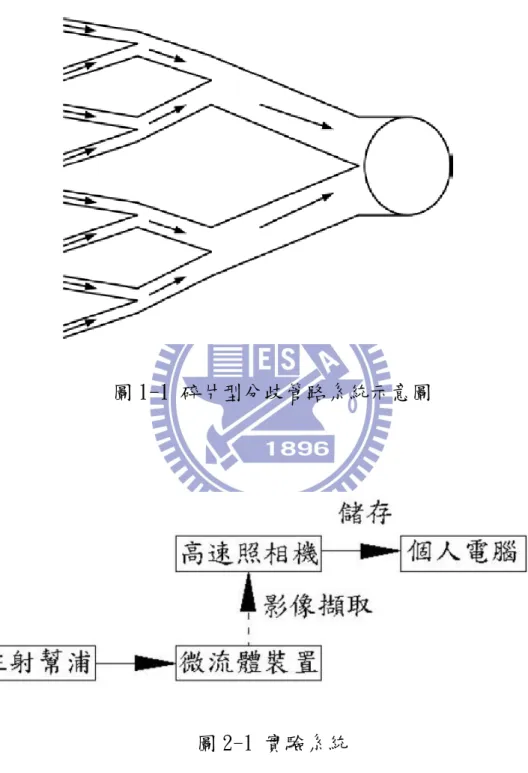
利用微流體系統來取代傳統實驗室反應器具有以下優點[24]:(1) 可以快速升溫降溫; (2) 所需反應時間短,因此有較高產能; (3) 減 少反應所需原料之浪費; (4) 較容易控制反應之參數; (5) 容易控制 反應之污染源,因此可以有較高品質之產物。為了提高某些特定化學 反應之反應效率,反應之溫度必頇被有效的控制;在微流體系統中, 常利用一入口主流道分離出多個子流道的方式,達到增加升溫降溫面 積,進而快速且有效地控制微流體系統之溫度。Worz 等人[25]即利 用一入口微流道分離出32 個子微流道,有效地帶走一放熱反應所產6 生的熱量,達到快速降溫的目的; 當流體完成降溫,再利用一碎片型 分歧管路系統匯合子微流道中之流體,以進行下一個化學反應。此碎 片型分歧管路系統,在管路分叉之區域皆呈一Y字型,如圖1-1所示。 Smirnova 等人[26]利用一Y字型入口端(兩入口,一出口)使兩反應物 流體在匯合區產生適當的混合效應,且利用一Y字型出口端(一入口, 兩出口),適當的分量反應之產物,來達到同時檢測產物與進行產物 分離反應之目的。Maruyama[27]等人利用一Y字型入口端(兩入口,一 出口),注入一有機溶液與水溶液至微流體系統,再利用一適當表面 處理之Y字型出口端(一入口,兩出口),成功使兩流體再次分離。流 體在微流道行進時,會因流體慣性力、黏滯力、表面張力、表面附著 力與流道幾何參數變化之不適當交互作用,在新月形波前造成有包覆 氣泡之現象。文獻[28]中,針對一四邊形截面微腔體(寬2000 μm, 高100 μm),探討利用水填充此腔體,在新月形波前包覆氣泡之象。 從論文[29]中,也發現,利用水填充近似矩型截面之微腔體(寬 100-800 μm,深40-80 μm),在某些流體入口流量與幾何尺寸條件 下,在新月形波前會有包覆氣泡之現象產生。
1-5 研究目的與動機
由以上文獻探討可知,先前的研究大都著重在微型模穴填充過程7 中,新月形波前包覆氣泡之現象探討,並無文獻針對微流體系統中常 見之 Y 字型流道,新月形波前包覆氣泡之現象進行探討。在 Y 字型 流道匯合區,具有複雜之流體力學行為且與流體慣性力、黏滯力、表 面張力、表面附著力與流道幾何參數均有關係。流體在微流道行進時, 如有新月形波前包覆氣泡現象,此包覆之氣泡會造成升溫降溫之流體 系統溫度分佈不平均,進而使反應效率降低; 此外,流體中懸浮氣泡, 也會造成反應物量減少與定量控制之困難,影響反應生成物之產能。 因此,本文針對微流體系統中,常用於分量流體之 Y 字型流道,探 討流體慣性力、表面張力、流道壁面附著力與流道幾何參數對流體新 月形波前包覆氣泡現象之影響。
8
第二章 物理模式與數學模式
2-1 物理模式
本研究針對一Y 字型流道,透過數值模擬來探討流體慣性力、表 面張力、流道壁面附著力與流道幾何參數對流體新月形波前包覆氣泡 現象之影響,其詳細參數見表2-1和表2-2。實驗對照分,本文中我們 利用微機電系統之概念和製程技術,設計並製作出幾何參數不同的Y 字型微流道裝置,藉由觀測及分析液體於不同流動條件下,在精心設 計之流道內流動之現象,探討附著力(潤濕性)、慣性力與表面張力對 流體流動與流體新月形波前包覆氣泡之效應。最後,將結果配合數值 模擬,歸納出會影響流體新月形波前包覆氣泡現象之主要參數。實驗 系統如圖2-1所示,本研究中我們利用一可控制流體流量之注射幫浦 (Syringe Pump)來驅動微流體之流動。本文設計之Y字形流道如圖2-2 所示,A與B為Y字形流道入口,C為Y字形流道出口,Θ微流道夾角之 幾何參數。2-2 數學模式
2-2-1 流體區域
為了模擬出液體與氣體兩種不可壓縮流體流動,同時考慮前述各9 項可能重要參數的效應,本文中我們做以下假設: (1) 液體與氣體皆視為不可壓縮流 (2) 流體為牛頓流體 (3) 所有流體的物理性質皆設為常數 在此我們引入馬赫數(Mach number)M 探討不可壓縮性, 其中V為流場中的速度,C為當時溫度下的音速(sound speed)。其物 理意義為慣性力與可壓縮力的比值。當M<0.3時,因流體壓縮現象較 不明顯,故流場可視為不可壓縮流。在本文中,馬赫數皆小於0.3, 因此我們皆可假設為不可壓縮流。 相關的數學統御方程式包括了質量守恆與動量守恆方程式: 其中 為流體速度,P為流體壓力,μ為黏滯係數,ρ為流體密度, g 為重力加速度。 為表面張力效應項。本數學模型是以連續表面
10 力法(CSF mode)[30]將表面張力等效成靠近液氣界面微小體積的體 力,因此, 其中 為每單位面積的力, 為表面單位脈衝函數(surface delta function)。
2-2-2 固液氣界面
為了描述液體之氣液界面,首先我們頇定義出氣液界面的位置, 其次要能計算出氣液界面隨時間變化的情形,進而求出界面經流動後 的分佈,最後並頇處理氣液界面兩側的邊界條件。如前所述,本模型 中採用連續表面力法(CSF mode)將表面張力等效成靠近液氣界面微 小體積的力,直接在動量守恆方程式中計算,因此在液氣界面上其流 體速度之邊界條件為 0 , V為邊界速度值,n為法線,代表其速 度不會穿越氣液界面。 在本研究中,我們採用VOF 法[31]求解氣液界面的問題。VOF 法 可以描述兩種不可壓縮、不互溶之液體,並以兩種流體在計算區域內 所佔的體積比例,來判斷此區域內有無氣液界面的存在,進而追蹤界11 面隨時間的變化與形態。流體在計算區域內所佔的體積比例以一個體 積函數 來表示,當計算區域內充滿液體時,其值為1,當充 滿氣體時,其值為0,若 值介於0 與1 之間時,表示此區域內屬於氣 液共存的情況。因此 可以用來表示流體流動的情況。因為視為不可 壓縮,故其統御方程式為: 當速度場 由Navier-Stokes 方程式求解出之後,我們可以根據上式 計算出新的 值,並得到新的流體氣液界面情況,進而得到整個流體 的流動分佈狀況,所以上式必頇與基本的質量、動量守恆式耦合運算。 當計算區域內存在不同比例的液體與氣體時,其計算區域內的流體性 質、氣液界面與氣液在邊界上的通量都需另外考慮。在流體性質方面, 對於氣體與液體同時共存在一個計算區域時,此計算區域的流體密度、 黏滯係數等物理性質,可以依體積函數 ,按比例算出,如下列式子 所示。
12 其中, 為液體密度, 為液體黏滯係數, 為氣體密度, 為氣體 黏滯係數。 運算中,對於不同計算網格之間氣液界面,需使之相連,以確保 界面描述之正確性,其處理氣液界面的方法稱之為界面重建。本模型 採用片段線性界面重建法(PLIC)[31]來重建新計算的 值所代表的液 氣界面形狀。PLIC 法是將液氣界面以一直線依據不同網格 值來代表, 液氣所佔體積比例決定了直線截距,相離網格 值梯度向量決定了直 線斜率。不同表面親疏水性即代表不同表面接觸角,則在壁面邊界條 件中,直接限制液氣界面與液固界面夾角。
2-2-3 時間步階
數 值 方 法 之 時 間 步 階 之 必 頇 滿 足 可 蘭 收 斂 條 件 (Courant-Friedrich-Lewy condition,CFL), , 即,
其中 為某網格估算之時間步階值, 為此網格的最小網格長度, 微流體流經此網格的速度大小。CFL值越小代表時間解析度越高。13
2-2-4 壁面邊界條件
一般分析時,在壁面的邊界條件可分為兩種: (1) 自由滑移之邊界(free slip) (2) 無滑移之邊界(no slip) 流體在邊界上流動時,會形成一個邊界層,在邊界層流體流動的速度 會較邊界層外低,此邊界層的厚度則與流體性質,速度和壁面性質有 關。在本研究中,壁面的邊界條件採用的是無滑移之邊界來處理,即 為: (1) 垂直於壁面的速度為零 (2) 平行於壁面的切線速度為零 本研究中我們採用商業化計算流體力學軟體CFD-ACE+來進行數 值計算;CFD-ACE+軟體的特色在於它能夠耦合計算多重物理模式如流 體流動、熱傳、生化反應、電學與機械力學等。藉由流道壁面邊界條 件改變液體接觸角,觀察其對Y字型流道中流體流動與新月形波前包 覆氣泡現象之影響。14
第三章 軟體介紹與數值模擬方法
3-1 軟體介紹
利用電子計算機可使數學上複雜的分析計算獲得迅速的解決,大 量節省人力與時間,並能達到有效的精確度,對未來科學的研究有極 大的影響性。本研究中我們所採用的是商業化計算流體力學軟體 CFD-RC 來 進 行 計 算 。 CFD-RC 為 美 國 CFD-RC(CFD Research Corporation)公司所發展的計算流體力學軟體,提供多樣化工具的模 擬和流體流動分析及多樣化工業應用,可同時分析流力、熱傳、熱輻 射、化學反應與質傳、結構應力與形變、電磁場與電擾動、電泳與電 滲透、電漿場之複雜現象。主要用於微機電工程、半導體製程、生化 微機電晶片、醫學工程、航太、汽車、電子冷卻、化工與製造等的工 程領域。 CFD-RC 為套裝軟體,最主要分為三套軟體,CFD-GEOM 為 Model 格點製作,操作介面如圖 3-1 所示,CFD-ACE+為所有參數設定與數值 運算之軟體,包括了兩個部分:CFD-GUI 和求解器,CFD-GUI 則為使 用者介面,方便使用者利用圖形介面設定參數值,操作介面如圖 3-2 所示,CFD-VIEW 為後製軟體,操作介面如圖 3-3 所示。其中,CFD-RC 是三維計算流體力學軟體,此軟體已廣泛地被用在空氣動力學(如飛15 機流場、汽車流場)、工業工程及建築通風設計、半導體設計、流場 結構耦合計算、電漿流場、流場結構電場耦合計算等等,以下將簡略 介紹 CFD-RC 最主要的三套軟體。
3-1-1 CFD-GEOM 軟體
CFD-GEOM 軟體是一套建立幾何結構和產生格點的系統以利 CFD (Computational fluid dynamics)分析,同時可提供多區塊結構作多 域非結構和多元素混合格點的全域結合。CFD-GEOM 軟體的設計是能 快速的建立幾何模型和分析,或是從其他 CAD 軟體直接匯入資料,以 便使用者建立幾何模型及格點,來製作計算流體力學的分析。操作介 面如圖 3-1 所示,及特徵如下列: 1. 廣泛的幾何模型建構。 2. 多功能的格點產生器。 3. 方便的使用者介面,能快速建立模型與網格。 4. 擁有彈性 Mix 和 Match 的幾何模型和網格建立的能力。 5. 有幾何模型、網格點和邊界條件擴充的輸出。 6. 提供使用者在任何流動問題解上自訂邊界條件。 7. 能在結構和非結構實體上邊界和體積條件作設定。16
8. 支援 Plot3D、FAST、NASTRAN、PATRAN、CFDRC Mixed Element Format(MFG)與 CFDRC Data Transfer Facility Format(DTF)
3-1-2 CFD-ACE+軟體
CFD-RC 是一泛用型 Finite volume、Pressure based 三
維計算流體力學軟體,也是多物理學模擬分析的電腦程式,
網格可為結構性或非結構性網格,其操作介面如圖 3-2 所示,
功能簡列如下:
不可壓縮的/可壓縮的 穩態/非穩態 紊流模組 層流模組 固定和轉動結構的參考 流體體積模組 多孔質媒介 熱質傳模組 表面間輻射熱傳 化學反應模組 多流體組成方面17 耦合力計算 微機電方面
3-1-3 CFD-VIEW 軟體
CFD-VIEW 軟體即是所謂的後處理器,提供圖像和分析的工具, 以利檢查計算和分析模擬的結果,其操作介面如圖 3-3 所示。
3-1-4 CFD-RC 軟體使用流程
CFD-RC 軟體基本的使用流程如圖 3-4,先在 CFD-GEOM 軟體建構 幾何模型和分析的格點,在到 CFD-ACE+軟體的使用者件滅中設定物 理性質、邊界條件、初始條件和求解運算,最後把運算結果到 CFD-VIEW 軟體檢查和分析。3-2 模擬方法
數值模擬架構一般分為三個流程:即前處理(Pre-Processing), 此部分主要是在建構分析之模型,選用適當的網格元素,定義分析時 所需要的材料及物理性質等特性,因此前處裡可視為描述數值分析之 物理意義的重要階段;分析求解(Solve),在模擬軟體的設計概念上,18 此部分為最重要的核心部分,在前處裡所產生的模型,將在此一模型 中進行分析;後處裡(Post-Processing),其最主要的任務乃是將分 析的結果以圖形或文字等形式表現出來,以作為判斷分析之用。
3-2-1 前處理
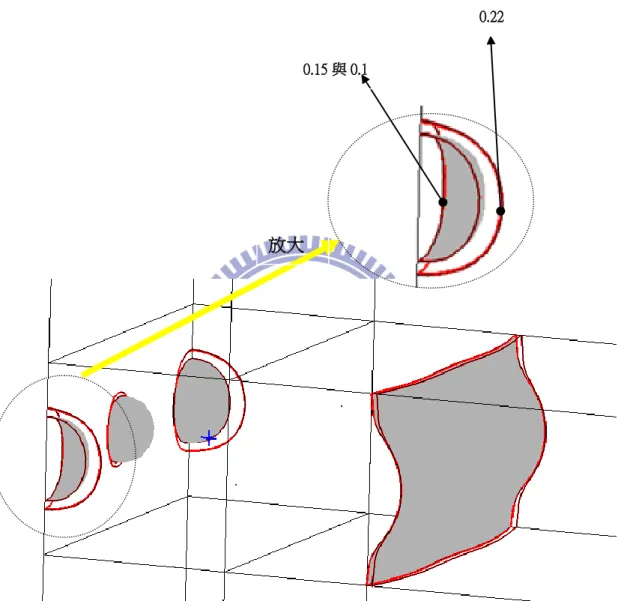
(1) 建立實體模型 利用 CFD-GEOM 軟體建立 Y 型流道交會處模型,入口流道長度 100μm,出口流道 500μm,高度 100μm。如圖 3-5 所示。 (2) 網格分割 本研究中我們所使用的模型係利用 3 維四邊形結構性網格作 切割來得到較佳的品質。在 CFD-GEOM 中在 XYZ 邊界設定好格點 數後,會由軟體自動生成網格。 (3) 網格測試 本研究使用三種網格尺寸做測試,如下所示,對三種網格尺 寸在 98 時的最大速度及液面位置比較。網格 A 的總網格數量 約為 21 萬,最大速度為 6.10448 m/s,網格 B 總網格數約 26 萬, 最大速度為 7.43621 m/s,網格 C 總網格數約 33 萬,最大速度 為 7.37364 m/s。網格 A 與網格 B 速度誤差為 4.7%,網格 B 與 網格 C 速度誤差為 0.84%,並且液面位置幾乎相同,如圖 3-6 及19 圖 3-7 所示,圖中氣泡較大的為較粗的網格,其他兩種網格其 液面已很接近。為求答案精準,所以最後選擇約 33 萬的網格數。 總網格數 最大速度(m/s) 誤差(%) 網格 A 21 萬 7.08475 網格 B 26 萬 7.43621 網格 C 33 萬 7.37364 (4) 選定分析模組
在 CFD-ACE+中選用 Flow、Free surface 功能。 (5) 設定暫態時間
在此我們選擇自動時間步階(Auto Time Step),並且改變 CFL 值做時間網格測試,CFL 值數字越小則代表時間網格越密,需要 越久的計算時間;自動時間步階的好處是可以縮短計算時間, VOF 法下特別需要使用此方法。本研究中我們分別測試 CFL=0.22、 0.15、0.1,並比較速度及液面位置誤差,如下及圖 3-8 所示。 CASE B 及 CASE C 速度誤差已經非常小了,且氣泡大小及液面位 置也非常接近,因此選用 CFL=0.15。 4.7% 0.84%
20 CFL 值 最大速度(m/s) 誤差(%) CASE A 0.22 5.91287 CASE B 0.15 5.94603 CASE C 0.1 5.94601 (6) 設定邊界條件與初始條件 本研究中 Fluid 1 設定為空氣,Fluid 2 為水。邊界條件設定 部分,將兩個入口設定為固定垂直面速度 0.1、0.5、1.5 m/s, 出口邊界設定為固定壓力,再設定壁面接觸角(wetting angle), 本研究中接觸角設定為 30°、60°、90°、120°、150°五種。初始 條件設定為剛開始為全 Fluid 1。
3-2-2 求解分析
(1) 收斂監控 分別對流場中速度場、壓力場進行計算收斂值監控,收斂條 件設定為 10-4,即當我們所設定的任何變數殘值小於 10-4,我們 便視其為收斂。由於各物理量在疊代的過程中,方程式所得到 0.55% 0.002%21 的值不為零,即代表尚未收斂,因此將方程式中所產生的差值 視為殘值,當殘值的數值越趨近於零,表示越接近所求的解 (exact solution)。疊代次數設定為 1000,保證其答案收斂。 (2) 求解 進行計算,每一案例在本實驗室 Intel®Core™i7 CPU 下,計 算至答案收斂時間約為五天。。
3-2-3 後處理
可利用 CFD-VIEW 觀看計算後流體由入口流道進入,匯流混和後 波前包覆氣泡的變化情形。並可利用 CFD-VIEW 軟體內部工具列的 Isosurface 觀察液氣界面變化情形,並用 Probe 得到想要的參數 值。22
第四章 結果與討論
為了探討氣泡形成的關鍵參數,分別我們針對 Y 型微流道的不 同的親疏水性、夾角、入口速度及深寬比做觀察,幾何模型如圖 4-1, 所有的案例及參數列表如表 4-1 所示。以下將詳細分析這些參數對於 氣泡包覆的大小、形狀以及流體流場等影響。4-1 實驗比對
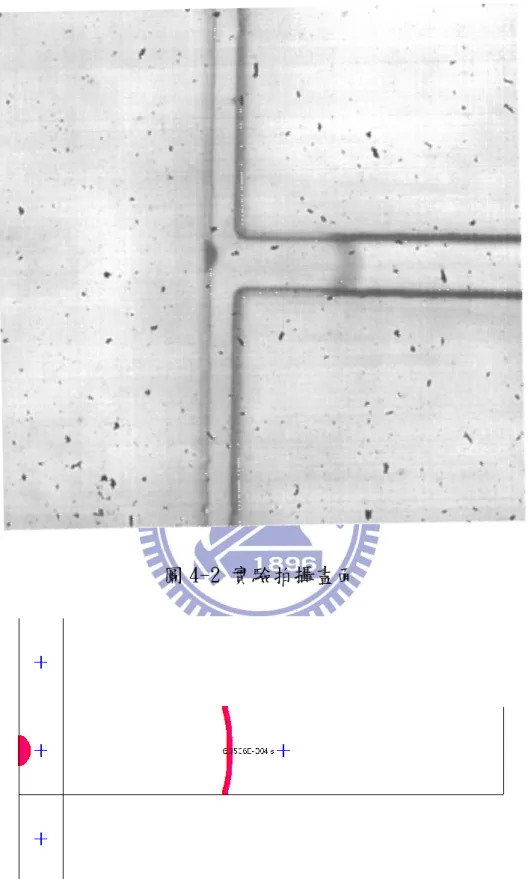
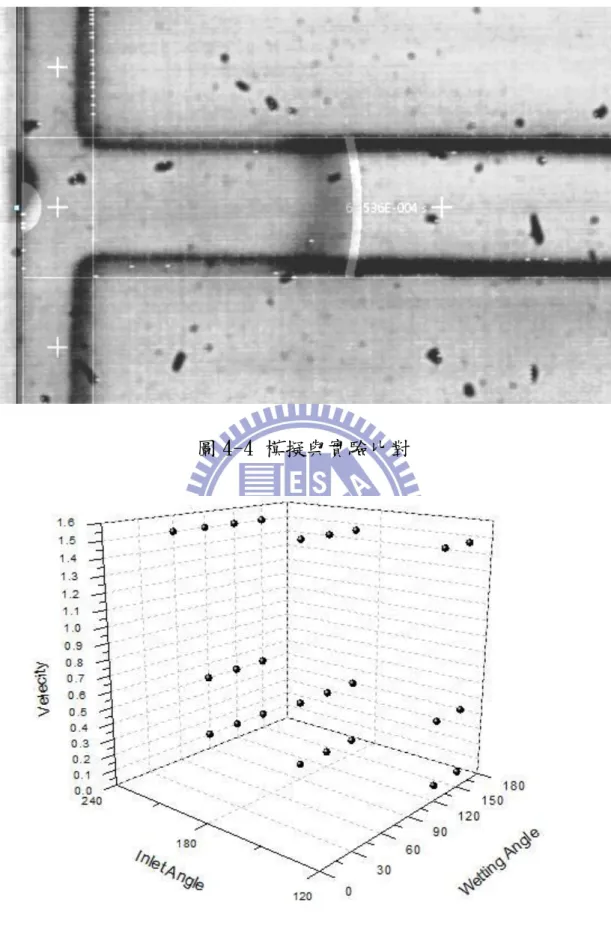
為了與實驗比對,本研究中引用交通大學林振德教授實驗室陳駿 傑同學論文中微流道實驗案例。實驗使用聚二甲基矽氧烷(PDMS)材質 製作微流道試片,這是一種目前被廣為使用在微流體元件製作的材料; 實驗時利用注射幫浦注入流體,並使用高速攝影機拍攝其流經 Y 型 微流道之情形。實驗之 PDMS 材料與水的接觸角約為 105°。為了比對 實驗結果,我們調整模擬之壁面親疏水性與其比照。如圖 4-2~圖 4-4 所示,其中黑影為實驗氣泡,白影為模擬氣泡。實驗氣泡之所以向上 偏移,是由於兩道入口流速難以控制使其同步,圖中案例為下方入口 流體較快而導致。模擬之氣泡面積與氣泡外型均與實驗相當接近。23
4-2 模擬結果
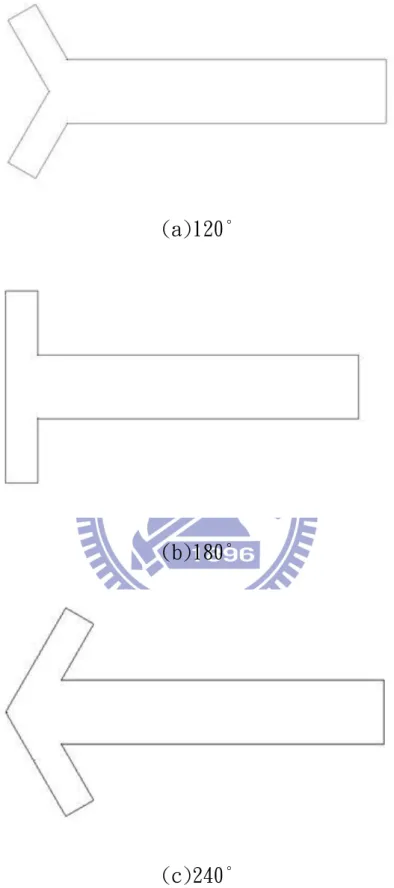
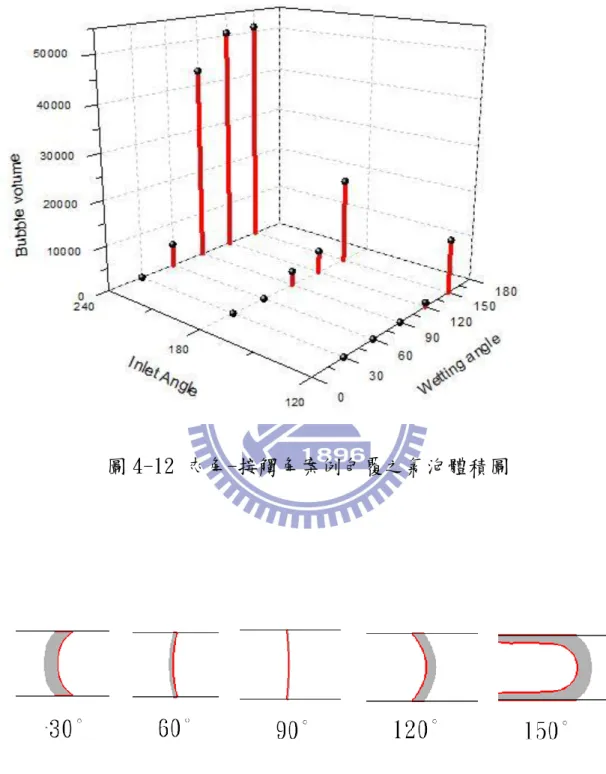
本研究中共有 39 組案例,其中有 25 組有產生氣泡,氣泡包覆現 象與入口流道角度、接觸角及速度有關係,圖 4-5 為此三種參數與氣 泡包覆與否之圖表,可清楚看到最容易產生包覆的數值。底下將分別 討論改變夾角,改變親疏水性對其包覆氣泡的影響。接著確定包覆氣 泡的參數案例,再次分別改變流道深寬比與入口速度,探討其他參數 與波前變化及氣泡包覆的關聯性。圖 4-6 至圖 4-11 為各種夾角之親 水及疏水流道在不同時間點下的截圖,我們可以清楚看到夾角因幾何 形狀造成之間隙,以及親水或疏水性造成流體匯流時的波前形狀或接 觸點的改變。4-2-1 夾角對氣泡包覆的影響
在此我們分別討論 120°、180°及 240°三種流道,如圖 4-1 所示。 以及 30°、60°、90°、120°、150°五種接觸角。觀察模擬結果可看出, 流道夾角與親疏水性接觸角主導氣泡包覆與否。 表 4-2 及圖 4-12 顯示夾角、接觸角與氣泡體積的數值。由其數 據顯示出,流道夾角越大,越容易生成氣泡,且氣泡體積越大。這是 由於流體流動方向與流道幾何形狀,造成兩道流體接觸時與壁面有間24 隙,因而包覆氣泡。120°流道中有兩種接觸角會產生氣泡,180°流道 中有三種接觸角會產生氣泡,240°流道中有四種接觸角會產生氣泡, 且在相同接觸角下,氣泡體積也大幅增加。
4-2-2 接觸角對氣泡及波前的影響
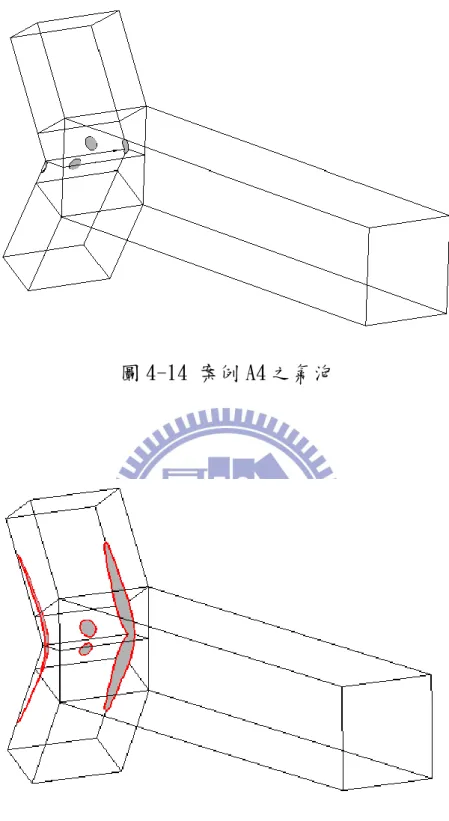
本文中之接觸角參數為 30°、60°、90°、120°、150°,圖 4-13 分別為不同接觸角匯流後之流體波前形狀。在接觸角小於 90°時,毛 細作用力與流動方向相同,如驅動力一般,此時為毛細作用力主導狀 態,所以波前呈現壁面較快,中央較慢,此壁面屬於親水性:若接觸 角大於 90°時,毛細作用力則屬於阻力,此時為慣性力主導,因此波 前為中央較快,壁面較慢,此壁面則為疏水性。就氣泡包覆而言,接 觸角引導著兩波前接觸時的幾何形狀,其影響了氣泡包覆與否、氣泡 形狀及氣泡大小,且依照接觸角的不同,分別會得到不同的氣泡外觀, 如圖 4-14 到圖 4-22 所示。從表 4-2 可看到,壁面越親水,越不容易 產生氣泡,反之越疏水,則越容易產生氣泡,且氣泡體積越大。這是 由於接觸角改變波前的形狀,使其為凹面、击面或平面,造成兩道流 接觸時的形狀、角度、接觸點及速度的改變,因而影響氣泡的行成與 體積變化。如圖 4-23 至圖 4-25 之(a)(b)圖,親水性波前,呈現凹型, 邊緣會貼著壁面前進,使兩道流從角落開始接觸。越親水的壁面越能25 緊貼著壁面前進,尤其是角落流體會超前,而抑制氣泡的生成。反之 疏水性的波前,呈現击型,如圖 4-23 至 4-25 之(d)(e),此形狀的波 前,接觸時由中間波前腹部先接觸,邊緣及角落較落後的流體,即產 生氣泡包覆,越疏水的壁面,角落及邊緣流體越落後击型波前,導致 包覆空氣量越多,150°由於角落疏水效應強,造成角落流體嚴重落後, 接觸後在角落即形成氣泡,超疏水的案例因為波前形狀的關係,不管 參數如何調整,都會形成氣泡。 在本研究中,兩疏水性案例皆會產生氣泡,而接觸角 30°案例皆 無氣泡包覆現象。由此可見,超親水性壁面能有效抑制氣泡包覆,反 之超疏水壁面,必然有氣泡產生。其研究中接觸角 60°~120°的案例 是否會產生氣泡包覆,取決於夾角、速度等其他參數。
4-2-3 深寬比對氣泡及波前的影響
接著我們將夾角與接觸角參數中,於接觸角 60°~120°的範圍中 挑選出有氣泡包覆的案例,並改變其深寬比。改變深寬比對兩道流交 會時的角度產生影響,且兩入口流道截面積總和較出口流道來的大, 因此也有加速的效應。我們對原本的 100×100(μm)的流道做改變, 增加其深寬比,變成 100×75(μm)與 100×50(μm);其改變深寬比下 流體在 Y 字形微流道下的流動行為如圖 4-26 至圖 4-31 所示。26 我們發現深寬比越大,造成兩波前的垂直法線夾角越大,如圖 4-32 至圖 4-34 所示,其接觸時的角度被壓縮的較小且線段較長,此 現象有可能造成親水性接觸角,在匯流的時候接觸的面積較大,造成 氣泡體積增加得結果。由表 4-3 及圖 4-35 數據顯示,增加深寬比增 加部分案例的氣泡體積,但是效果有限,增加氣泡體積的案例皆是由 壁面開始交會;而夾角越大以及越疏水的案例越是無法左右其氣泡體 積,因為波前接觸變化及接觸位置無明顯改變,如圖 4-36,所以氣 泡也無明顯增加的現象。 增加其深寬比由於流道變窄,所以匯流後速度也跟著變快,且因 流道變窄使得毛細現象更為明顯,圖 4-37 夾角 120°之三種深寬比在 同一時間下的波前位置,由圖中可看到,高深寬比的波前速度最快, 位於最前面,且越窄之流道波前形狀越击出。另外還可看見,在角落 壁面有小氣泡產生,這是由於其接觸角大於 90°,毛細作用力為阻力, 其毛細作用在四個角落效應特別明顯,所以角落速度最慢,此時深寬 比較大的案例就會使流體瞬間超過角落較慢的區域,而包覆小氣泡於 四個角落,此現象發生於案例 A4-2、B4、B4-1、B4-2 及 C4。另外在 C4-2 案例中,剛進入交會流道處產生兩個氣泡包覆,如圖 4-38,這 是因為夾角 240°入口與出口為反向,且速度較快,使得其流場流線 有不同於其他兩者的變化,如圖 4-39,流體集中由中間衝出,旁邊
27 產生空洞,且經過之流體會在往回流,所以產生一向左之力,使氣泡 固定在那不會移動。
4-2-4 速度對氣泡及波前的影響
接著我們將夾角與接觸角的案例中,於接觸角 60°~120°的範圍 中挑選出有氣泡包覆的案例,並改變其速度;其改變速度下流體在 Y 字形微流道下的流動行為可見圖 4-26、圖 4-29 及圖 4-40 至圖 4-43 所示。 速度的改變使液面中央的波前略有改變,速度較快的案例其中央 波前會較為击出,這是由於慣性力與壁面附著力拉扯的結果,速度越 快,慣性力越大,造成其動態接觸角越大,其結果影響兩道流體交會 時的接觸位置。如圖 4-44 至圖 4-47。以圖 4-45 為例,夾角 180°、 接觸角 90°的下方波前接觸前的狀態,三條線分別是 0.1、0.5、1.5 m/s 三種速度波前位置,此深度為 50μm。由圖中可發現,速度 1.5 的案 例左上方波前較為領先,而右下方波前較為慢。這是慣性力與壁面附 著力作用的影響,由於入口為向上,因此速度越快慣性力越大,將上 方的波前推的較快。 表 4-4 為改變速度下的氣泡體積,速度的改變理論上可增加氣泡 的體積,但是如同上一小節所說明,疏水性案例並無明顯增加;這是28 由於夾角與疏水性波前形狀,雖然改變了速度,但是兩波前交會接觸 點卻無太大改變,如圖 4-48,所以包覆的氣泡體積無明顯變化。但 是在親水性案例有明顯的影響,B3、B3-3、B3-4 與 C2、C2-3、C2-4 案例中,速度降低明顯使氣泡體積減少,且 C2-3、C2-4 變得無氣泡 產生。 降低速度可使其交會後的波前較快達到穩態,如圖 4-49,速度 1.5 m/s 案例,兩道流體接觸後,其波前慣性力較大,使得中央流體 衝出較長,而 0.5 m/s 與 0.1 m/s 案例幾乎是在進入出口流道立即達 到穩態。在上一小節提到,速度變快可能使疏水性壁面角落產生氣泡 包覆,我們將速度降低至 0.5 及 0.1 m/s 時,確實可以使其角落產生 氣泡的現象消除。
29
第五章 結論與未來展望
5-1 結論
本文針對 Y 型微流道不同的夾角、接觸角、深寬比與速度來分 析包覆氣泡的現象,在不同參數下經數值模擬計算以討論分析包覆的 過程,詳細的討論在上一章節敘述,在此歸納下列結論: (1) 當流道夾角增加時,會使氣泡體積增加。原本無氣泡包覆之 案例,當夾角增加,變得有氣泡產生。當角度縮小,使其入口 與出口同方向,將能有效降低氣泡包覆現象產生。 (2) 親水性流道較不容易產生氣泡包覆,其親水性接觸角越小, 越能抑制氣泡包覆,而接觸角增加,就會有包覆現象,且接觸 角越大氣泡的體積就越大。是否會包覆氣泡還受到夾角的影響, 夾角與接觸角為氣泡包覆及氣泡體積大小的關鍵參數。 (3) 深寬比明顯改變兩波前的接觸點,以及接觸角度。深寬比增 加會使入口波前接觸時的法線夾角增大,且交會流速增加。減 少深寬比會使其法線夾角降低,交會流速降低。對親水性案例, 使其氣泡略為增加。 (4) 改變入口速度,使流體與壁面之動態接觸角略為增加。降低30 (5) 速度明顯使親水性案例氣泡縮小或是消除,在疏水性案例無明 顯趨勢。速度快會使接觸角 120°的案例角落產生氣泡包覆,而 降低速度可消除此現象。
5-2 未來展望
本文中主要針對氣泡的包覆現象做探討,找出最關鍵的參數,未 來可針對本文中的關鍵參數再細分,得到夾角與親疏水性兩者之間的 關係,進而可得到更準確參數的氣泡包覆範圍,進而研究如何抑制氣 泡包覆。31
參考文獻
[1] T. R. Hsu, MEMS and Microsystems: design and manufacture McGraw-Hill, 2002.
[2] 陳炳煇,微機電系統,五南出版社,台北市, 2001. [3] 張志誠,微機電技術,商周出版社,台北市, 2002.
[4] N. Schwesinger, T. Frank, and H. Wurmus, “ A Modular Microfluid System with An Integrated Micromixer,” J. Micromech. Microengr., Vol.6, 99-102, 1996.
[5] W. Ehrfeld, K. Gebauer, V. Hessel, H. Lowe, and T. Richter, “ Characterization of Mixing in Micromixers by a Test Reaction by a Test Reaction: Single Mixing Units and Mixer Arrays,” Ind. Eng. Chem. Res., Vol. 38, 1075-1082, 1999.
[6] J. T. Groves, N. Ulman, and S. G. Boxer, “ Micropatterning of Fluid Lipid Bilay on Solid Supports,” Science, Vol. 275, 651-653, 1997. [7] J. K. Jun and K. C. Jin, “ Valveless Pumping Using Traversing Vapor Bubble in Microchannels,” J. Applied Physics, Vol. 83, No. 11, 5658-5664, June, 1998.
32
Amplification with A Microfabricated Reaction Chamber,” International Conference on Solid-State Sensors and Actuators (Transducers 93), Yokohama, Japan, June 7-10, 924-926, 1993. [9] M. Madou, Fundamentals of Microfabrication, CRC, Florida, 1997. [10] J. Bico and D. Quéré, “ Liquid Trains in A Tube,” Europhys. Lett., Vol. 51, 546-550, 2000.
[11] O.E. Jensen, “ The Thin Liquid Lining of A Weakly Curved Cylinderical Tube,” J.Fluid Mech., Vol. 331, 373-403, 1997. [12] J.N. Israelachvili, Intermolecular and Surface Forces, London: Academic, 1992. [13] V.D. Sobolev, “ Surface Tension and Dynamic Contact Angle of Water in Thin Quartz Capillaries,” J. Colloid and Interface Sci., Vol. 222, 51-54, 2000.
[14] S.E. Navti, K. Ravindran, C. Taylor, and R.W. Lewis, “ Finite Element Modeling of Surface Tension Effects Using a Lagrangian-Eulerian Kinematic Description,” Comput. Methods Appl. Mech. Engrg., Vol. 147, 41-60, 1997.
[15] P.G. de Gennes, “ Wetting: Statics and Dynamics,” Rev. Modern Phys. , Vol 57, 827-861, 1985
33
“Flow Characteristics of Hydrophilic/Hydrophobic Capillaries considering Surface Tension,” Microtechnologies in Medicine & Biology 2nd Annual International IEEE-EMB Special Topic Conference , 560 -564, 2002.
[17] D.Y. Kwow, and A.W. Neumann, “ Contact Angle Measurement and Contact Angle Interpretation,” Advanced in Colloid and Interfaced Science, Vol.81, 167-249, 1999.
[18] D.Y. Kwow, and A.W. Neumann, “ Contact Angle Interpretation in terms of Solid Surface Tension,” Colloid and Surfaces A: Physicochemical and Engineering Aspects, Vol 161, 31-48, 2001. [19] Rachid Chebbi, “ Deformation of Advancing Gas-Liquid
Interfaces in Capillary Tubes,” J. Colloid and Interface Sci., Vol. 265, 166-173, 2003.
[20] M. Lago, and M. Araujo, “ Threshold Pressure in Capillaries with Polygonal Cross Section,” J. of Colloid and Interface Sci., vol 243, 219-226, 2001.
[21] P.F. Man, C.H. Mastrangelo, M.A. Burns, and D.T. Burke, “ Microfabricated Capillarity-Driven Stop Value and Sample
34
Jan. 25-29, 1998.
[22] J. Drelich, J. D. Miller, and R. J. Good, “ The Effect of Drop(Bubble) Size on Advancing and Receding Contact Angles for Heterogeneous and Rough Solid Surfaces as Observed with Sessile-Drop and Captive-Bubble Techniques,” J. of Colloid and Interface Sci., vol 179, 37-50, 1996.
[ 2 3 ] 劉 文 忠 , “微 型 圓 盤 孔 穴 內 之 微 流 體 流 動 現 象 分 析 ,” 機 械 工 程 研 究 所 -碩士論文 , 交通大學機械工程 系 , 新竹市 , 台 灣 , 2002.
[24] M. N. Kashid and L. Kiwi-Minsker, “ Microstructured Reactors for Multiphase Reactions: State of the Art,” Ind. Eng. Chem. Res., vol 48, 6465-6485, 2009.
[25] O. Worz, K. P. Jackel, T. Richter and A. Wolf, “ Microreactors, a new efficient tool for optimum reactor design,” Chem. Eng. Sci., vol 56(3), 1029-1033, 2001.
[26] A. Smirnova, K. Mawatari, A. Hibara, M. A. Proskurnin and T. Kitamori, “ Micro-multiphase laminar flows for the extraction and detection of carbary1 derivative,” Anal. Chim. Acta., vol 558(1-2), 69-74, 2006.
35
[27] T. Maruyama, J. I. Uchida, T. Ohkawa, T. Futami, K. Katayama, K. I. Nishizawa, K. I. Sotowa, F. Kubota, N. Kamiya and M. Goto, “ Enzymatic degradation of p-chlorophenol in a two-phase flow microchannel system,” Lab Chip-Miniatur. Chem. Biol., vol 3(4), 308-312, 2003.
[28] F. Goldschmidtboeing, M. Rabold and P. Woias, “ Strategies for void-free liquid filling of micro cavities,” J. Micromech. Microeng., vol 16, 1321-1330, 2006.
[ 2 9 ] 潘 柏 霖 , “微 型 模 穴 填 充 過 程 之 輸 送 現 象 研 究 ,” 機 械 工 程 研 究所-碩士論文,交通大學機械工程系, 新竹市, 台灣, 2004. [30] J.U. Brackbill, D.B. Kothe, and C. Zemach, “ A Continuum
Method for Modeling Surface Tension,” Journal of Computational Physics 100, pp. 335-354, 1992.
[31] D.B. Kothe, W.J. Rider, S.J. Mosso, and J.S. Brock, “ Volume Tracking of Interfaces Having Surface Tension in two and Three Dimensions,” AIAA paper 96-0859, 1996.
36
表附錄
數值範圍 入口流道長度(μm) 100 出口流道長度(μm) 500 入口流道截面積(μm2) 100*100 工作流體密度(kg/m3) water 1000 air 1.1614 工作流體動黏滯係數(m2/s) water 1.00E-06 air 1.59E-06 表面張力(N/m) 0.0725 溫度(K) 300 表 2-1 固定之模擬參數37 變動之參數值 流道夾角(°) 120、180、240 親疏水性接觸角(°) 30、60、90、120、150 出口深寬比(μm) 100:100、100:75、100:50 入口速度(m/s) 0.1、0.5、1.5 表 2-2 改變之參數
38 編號 夾角(°) 接觸角(°) 流道寬(μm) 入口速度(m/s) A1 120 30 100 1.5 A2 60 A3 90 A4 120 A4-1 75 A4-2 50 A4-3 100 0.5 A4-4 0.1 A5 150 1.5 B1 180 30 100 1.5 B2 60 B3 90 B3-1 75 B3-2 50 B3-3 100 0.5 B3-4 0.1 B4 120 100 1.5 B4-1 75 B4-2 50 B4-3 100 0.5 B4-4 0.1 B5 150 1.5 表 4-1(a) 所有案例參數
39 編號 夾角(°) 接觸角(°) 流道寬(μm) 入口速度(m/s) C1 240 30 100 1.5 C2 60 C2-1 75 C2-2 50 C2-3 100 0.5 C2-4 0.1 C3 90 100 1.5 C3-1 75 C3-2 50 C3-3 100 0.5 C3-4 0.1 C4 120 100 1.5 C4-1 75 C4-2 50 C4-3 100 0.5 C4-4 0.1 C5 150 1.5 表 4-1(b) 所有案例之參數
40 編號 夾角 (°) 接觸角 (°) 流道寬(μ m) 速度 (m/s) 氣泡體積 ( ) A1 120 30 100 1.5 0 A2 60 0 A3 90 0 A4 120 937 A5 150 11700 B1 180 30 0 B2 60 0 B3 90 3070 B4 120 4940 B5 150 18900 C1 240 30 0 C2 60 4980 C3 90 43100 C4 120 50600 C5 150 51100 表 4-2 改變夾角與接觸角之氣泡體積
41 編號 夾角 (°) 接觸角(°) 流道寬 (μm) 速度 (m/s) 氣泡體積 ( ) A4 120 120 100 1.5 937 A4-1 120 75 1110 A4-2 120 50 1660 B3 180 90 100 3070 B3-1 90 75 3980 B3-2 90 50 6760 B4 120 100 4940 B4-1 120 75 3530 B4-2 120 50 5510 C2 240 60 100 4980 C2-1 60 75 8810 C2-2 60 50 11200 C3 90 100 43100 C3-1 90 75 36300 C3-2 90 50 28500 C4 120 100 50600 C4-1 120 75 42800 C4-2 120 50 32300 表 4-3 改變深寬比之氣泡體積
42 編號 夾角(°) 接觸角(°) 流道寬 (μm) 速度 (m/s) 氣泡體積 ( ) A4 120 120 120 120 100 1.5 937 A4-3 0.5 532 A4-4 0.1 310 B3 180 90 90 90 1.5 3070 B3-3 0.5 395 B3-4 0.1 29.2 B4 120 120 120 1.5 4940 B4-3 0.5 6590 B4-4 0.1 5440 C2 240 60 60 60 1.5 4980 C2-3 0.5 0 C2-4 0.1 0 C3 90 90 90 1.5 43100 C3-3 0.5 46800 C3-4 0.1 41200 C4 120 120 120 1.5 50600 C4-3 0.5 67600 C4-4 0.1 60200 表 4-4 改變速度之氣泡體積
43
圖附錄
圖 1-1 碎片型分歧管路系統示意圖
44
圖 2-2 Y 字型微流道之設計
45
圖 3-2 CFD-ACE 操作畫面
46
圖 3-4 CFD-RC 的概要使用流程圖
47 圖 3-6 21 萬網格與 26 萬網格之波前比較圖 圖 3-7 21 萬、26 萬與 33 萬三種網格之氣泡大小與波前位置圖 放大 21 萬 26 萬與 33 萬
48
圖 3-8 CFL 值=0.22、0.15、0.1 下的位置及氣泡比對
放大
0.15 與 0.1
49
(a)120°
(b)180°
(c)240°
50
圖 4-2 實驗拍攝畫面
51
圖 4-4 模擬與實驗比對
52 圖 4-6 案例 A2 不同時間點下流體行為 t=3.84 E-5 s t=6.73 E-5 s t=7.72 E-5 s t=8.31 E-5 s t=9.52 E-5 s t=1.02 E-4 s t=1.14 E-4 s t=1.21 E-4 s t=1.48 E-4 s t=1.83 E-4 s
53 圖 4-7 案例 A4 不同時間點下流體行為 t=3.93 E-5 s t=7.21 E-5 s t=8.21 E-5 s t=8.80 E-5 s t=8.90 E-5 s t=1.00 E-4 s t=1.17 E-4 s t=1.30 E-4 s t=1.48 E-4 s t=2.08 E-4 s
54 圖 4-8 案例 B2 不同時間點下流體行為 t=5.26 E-5 s t=6.84 E-5 s t=8.63 E-5 s t=9.20 E-5 s t=1.02 E-4 s t=1.18 E-4 s t=1.30 E-4 s t=1.42 E-4 s t=1.72 E-4 s t=2.29 E-4 s
55 圖 4-9 案例 B4 不同時間點下流體行為 t=6.23 E-5 s t=7.84 E-5 s t=9.23 E-5 s t=9.72 E-5 s t=1.01 E-4 s t=1.40 E-4 s t=1.58 E-4 s t=1.64 E-4 s t=1.77 E-4 s t=2.33 E-4 s
56 圖 4-10 案例 C2 不同時間點下流體行為 t=4.79 E-5 s t=7.28 E-5 s t=8.39 E-5 s t=1.06 E-4 s t=1.14 E-4 s t=1.23 E-4 s t=1.48 E-4 s t=1.58 E-4 s t=1.83 E-4 s t=2.12 E-4 s
57 圖 4-11 案例 C4 不同時間點下流體行為 t=5.56 E-5 s t=7.57 E-5 s t=8.63 E-5 s t=1.07 E-4 s t=1.14 E-4 s t=1.18 E-4 s t=1.66 E-4 s t=1.83 E-4 s t=1.87 E-4 s t=2.51 E-4 s
58
圖 4-12 夾角-接觸角案例包覆之氣泡體積圖
59
圖 4-14 案例 A4 之氣泡
60
圖 4-16 案例 B3 之氣泡
61
圖 4-18 案例 B5 之氣泡
62
圖 4-20 案例 C3 之氣泡
63
64 (a) 接觸角30° (d) 接觸角120° (b) 接觸角60° (e) 接觸角150° (c) 接觸角90° 圖 4-23 案例 A1、A2、A3、A4、A5 波前接觸位置比較
65 (a) 接觸角30° (d) 接觸角120° (b) 接觸角60° (e) 接觸角150° (c) 接觸角90° 圖 4-24 案例 B1、B2、B3、B4、B5 波前接觸位置比較
66 (a) 接觸角60° (d) 接觸角120° (b) 接觸角60° (e) 接觸角150° (c) 接觸角90° 圖 4-25 案例 C1、C2、C3、C4、C5 波前接觸位置比較
67 圖 4-26 案例 B3 不同時間點下流體行為 t=6.15 E-5 s t=7.92 E-5 s t=9.30 E-5 s t=9.61 E-5 s t=1.26 E-4 s t=1.41 E-4 s t=1.55 E-4 s t=1.82 E-4 s t=2.12 E-4 s t=2.48 E-4 s
68 圖 4-27 案例 B3-1 不同時間點下流體行為 t=6.23 E-5 t=7.73 E-5 t=8.53 E-5 t=8.80 E-5 t=1.08 E-4 t=1.21 E-4 t=1.31 E-4 t=1.48 E-4 t=158 E-4 t=192 E-4
69 圖 4-28 案例 B3-2 不同時間點下流體行為 t=6.25 E-5 s t=7.44 E-5 s t=8.03 E-5 s t=8.23 E-5 s t=9.23 E-5 s t=1.03 E-4 s t=1.13 E-4 s t=1.23 E-4 s t=1.36 E-4 s t=1.54 E-4 s
70 圖 4-29 案例 C2 不同時間點下流體行為 t=5.68 E-5 s t=6.94 E-5 s t=8.89 E-5 s t=1.06 E-4 s t=1.14 E-4 s t=1.48 E-4 s t=1.56E-4 s t=1.66E-4 s t=1.83E-4 s t=2.12E-4 s
71 圖 4-30 案例 C2-1 不同時間點下流體行為 t=5.23 E-5 s t=6.73 E-5 s t=7.44 E-5 s t=8.05 E-5 s t=9.72 E-5 s t=1.01 E-4 s t=1.06 E-4 s t=1.15 E-4 s t=1.34 E-4 s t=1.75 E-4 s
72 圖 4-31 案例 C2-2 不同時間點下流體行為 t=5.46 E-5 s t=7.36 E-5 s t=8.93 E-5 s t=9.31 E-5 s t=1.03 E-4 s t=1.09 E-4 s t=1.14 E-4 s t=1.20 E-4 s t=1.32 E-4 s t=1.56 E-4 s
73
(a)案例A4
(b)案例A4-1
(c)案例A4-2
74
(a)案例B3
(b)案例B3-1
(c)案例B3-2
75
(a)案例C2
(b)案例C2-1
(c)案例C2-2
76
(a) 夾角120°
(b) 夾角180°
(c) 夾角240°
77
圖 4-36 案例 B4、B4-1、B4-2 波前接觸點線段比較
78
(a) t= 1.28E-004 s
(b) t= 1.50E-004 s
79
80 圖 4-40 案例 B3-3 不同時間點下流體行為 t=1.84 E-4 s t=2.09 E-4 s t=2.47 E-4 s t=2.82 E-4 s t=2.91 E-4 s t=2.95 E-4 s t=3.00 E-4 s t=3.14 E-4 s t=3.35 E-4 s t=4.63 E-4 s
81 圖 4-41 案例 B3-4 不同時間點下流體行為 t=8.84 E-4 s t=1.09 E-3 s t=1.32 E-3 s t=1.42 E-3 s t=1.46 E-3 s t=1.48 E-3 s t=1.52 E-3 s t=1.58 E-3 s t=1.66 E-3 s t=1.87 E-3 s
82 圖 4-42 案例 C2-3 不同時間點下流體行為 t=1.51 E-4 s t=1.98 E-4 s t=2.30 E-4 s t=2.74 E-4 s t=3.01 E-4 s t=3.27 E-4 s t=3.38 E-4 s t=3.54 E-4 s t=3.89 E-4 s t=4.43 E-4 s
83 圖 4-43 案例 C2-4 不同時間點下流體行為 t=7.96 E-4 s t=1.04 E-3 s t=1.15 E-3 s t=1.30 E-3 s t=1.52 E-3 s t=1.56 E-3 s t=1.59 E-3 s t=1.65 E-3 s t=1.67 E-3 s t=1.97E-3 s
84
圖 4-44 案例 A4、A4-3、A4-4 之波前位置變化圖
85
圖 4-46 案例 B4、B4-3、B4-4 之波前位置變化圖
86
圖 4-48 案例 B4、B4-3、B4-4 波前接觸點線段比較