國 立 交 通 大 學
機械工程學系
碩士論文
數位微流體技術於產生奈升級液滴
之數值模擬
Simulation of Creating Nano-liter Droplets
Based on Digital Microfluidic Device
研究生 :林國華
指導教授 :陳俊勳
教授
數位微流體技術於產生奈升級液滴之數值模擬
Simulation of Creating Nano-liter Droplets Based on Digital Microfluidic Device 研究生 :林國華 Student:Guo-Hua Lin 指導教授:陳俊勳 Advisor:Chiun-Hsun Chen 國 立 交 通 大 學 機 械 工 程 學 系 碩 士 論 文 A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University In Partial Fulfiillment of the Requirements
For the Degree of Master of Science In Mechanical Engineering
June 2006
Hsinchu, Taiwan, Republic of China
數位微流體技術於產生奈升級液滴之數值模擬 學生:林國華 指導教授:陳俊勳 國立交通大學機械工程學系 摘要 介電層電濕技術是不需要微流道便可控制流體的新技術,具有製 程簡便、微量控制、混合容易、成本低廉等優點。本文模型的建立是 基於流體力學中連續與動量方程式為依據,並把焦點放在液滴現象 上。目的主要是模擬 EWOD 現象下的液滴傳輸、分離以及取樣 (creating)奈升液珠等行為。本文中使用 CFD-ACE+商業軟體將具體呈 現奈升級液珠的模擬與實驗結果上的相互比對。最後為了抵抗流道高 度變小時所帶來的流阻,則藉由設計主乘載電極中所鑲嵌鋸齒狀電極 的開啟與關閉機制來提升液滴的壓差,並由最後的模擬結果得知增加 鋸齒狀電極面積則能提升液滴壓差來抵抗流阻。
Simulation of Creating Nano-liter Droplets Based on Digital Microfluidic Device
Student: Guo-Hua Lin Advisor: Prof. Chiun-Hsun Chen Department of Mechanical Engineering
National Chiao Tung University ABSTRACT
Electrowetting on dielectric (EWOD) is a new technology which moves fluid by surface tension effects and does not need channels to control fluids. It possesses some advantages, such as simplicity of fabrication, control of minute volume, fast mixing, low cost, and so on. This thesis presents a model based on a reduced form of the continuity and momentum equations to simulate the fluid dynamics of the droplets. This model is able to simulate transporting, cutting and creating of nano-liter droplets based on EWOD. In this study, the simulation results using commercial software, CFD-ACE+, for the motion of nano-liter droplets are reported and compared with the experimental results. In order to overcome the resistance of channels, a design of reservoir electrodes with a shape of jag is proposed to raise the pressure difference of the droplet between on-state and off-state of the electrode. The simulation results show that the pressure difference of the droplet increases as raising the area of the jagged electrode.
誌謝 回看兩年碩士生活自覺得有許多成長,其中最感謝陳俊勳老師與 張凌昇老師的指導及栽培,讓我在交大與成大期間有許多不同領域的 知識成長外,對於研究方法與態度、思考與做事觀念等,都使學生能 在求學期間所遇到的問題能一一克服,對於未來競爭力上學生覺得受 益良多,在此對兩位老師獻上無限的感激與敬意。 其中也感謝在研究過程中的文耀、文奎、大達、耀慶、義雄、俊 衡、亞叡等學長在碩班生活上的學習與指導,還有嘉鴻、靜慈、世璋、 孟熹、家瑜、智堡等同學的互相學習與鼓勵。而在碩二生涯中也特別 謝在成大的垣杰、敏峰、智淵、偉雄、耀文、浩凱、浩君以及交大與 南台科大的所有同學與學弟,當我在成大做研究及生活上的幫忙真的 很謝謝你們。其中感念與跟我從交大一起下來並在生活中互相砥礪的 關恕,以及我ㄧ起研究及討論的宜良,在此也深深祝福他們的未來博 士學程順利。 最後感謝我的父母、妹妹在我求學過程中的一路陪伴與鼓勵,謝 謝你們我愛你們。
目錄 頁碼 摘要... i ABSTRACT... ii 誌謝... iii 目錄... iv 表目錄... vi 圖目錄... vii 符號表... ix 第一章 緒論...1 1.1 研究動機... 1 1.2 研究目的... 3 1.3 論文架構... 3 第二章 文獻回顧與公式探討 ...4 2.1 文獻回顧... 4 2.2 基礎公式探討 ... 5
2.2.1 電雙層(electric double layer) ... 5
2.2.2 Lippman's Equation ... 6 2.2.3 Young’sEquation ... 6 2.2.4 EWOD 於兩平板下之等效電路 ... 8 2.2.5 驅動力(Actuation Force)... 8 2.2.6 Droplet cutting ... 10 第三章 數值方法介紹...17 3.1 理論分析... 17
3.1.1 統御方程式... 17 3.2 數值方法... 18 3.2.1 SIMPLEC 法... 19 3.2.2 VOF-PLIC... 20 3.2.3 網格與時間解析... 21 第四章 結果與討論...25 4.1 網格模型建立... 25 4.2 實驗量測流程... 25 4.3 理論模型與實際結果比對 ... 26 4.3.1 接觸角之理論值與實驗比對 ... 26 4.3.2 數值模型與實驗對照... 28 4.3.3 取樣模擬結果與理論公式對照 ... 29 4.4 電極設計對液滴取樣影響分析 ... 31 4.4.1 次電極設計概念... 31 4.4.2 比對有無次電極之影響... 31 4.4.3 比對次電極於不同面積下之影響 ... 32 第五章 結論與展望...58 參考文獻...59 簡歷...62
表目錄
頁碼 表 4.1 模型建立之參數表 ... 29 表 4.2 取樣模型幾何形狀尺寸與物理參數對照表... 31 表 4.3 不同面積比例下網格數與邊界條件經電場改變範圍... 33
圖目錄 頁碼 圖 2.1 以電濕法來移動在電解質中的金屬液體(水銀)... 12 圖 2.2 Continuous electrowetting 元件示意圖 ... 12 圖 2.3 介電質材料上的電濕潤效應 ... 13 圖 2.4 (N X M)棋盤式設計示意圖 ... 13 圖 2.5 電雙層示意圖 ... 14 圖 2.6 三相接觸線位移圖 ... 14 圖 2.7 EWOD 於兩平板下之等效電路... 14 圖 2.8 Laplace-Young 方程式推導示意圖... 15 圖 2.9 淨壓差驅策液滴位移示意圖... 15 圖 2.10 多視角液滴分離示意圖 ... 16 圖 3.1 SIMPLEC 演算法流程圖 ... 23 圖 3.2 界面重建數值方法... 24 圖 4.1 EWOD 的元件光罩圖 ... 34 圖 4.2 全尺寸試片模型網格分佈 ... 35 圖 4.3 實驗設備與架設示意圖 ... 36 圖 4.4 實驗流程圖 ... 37 圖 4.5 理論與實驗量測接觸角比對圖... 38 圖 4.6 流道高度 70 m與電極大小 2×2 ㎜ 2液滴傳輸動作分解圖 . 39 圖 4.7 流道高度 70 m與電極大小 2×2 ㎜ 2液滴分離動作分解圖 . 40 圖 4.8 流道高度 140m與電極大小 2×2 ㎜ 2液滴取樣動作分解圖 . 41 圖 4.9 液滴於流道高度 210m與電極 1×1 ㎜ 2取樣動作分解圖... 42 圖 4.10 液滴於流道高度 140m與電極 1×1 ㎜2取樣動作分解圖... 43 圖 4.11 液滴於流道高度 210m下頸縮區域壓力圖... 44
圖 4.12 液滴於流道高度 140m下頸縮區域壓力圖... 45 圖 4.13 次電極(鋸齒狀電極)網格分佈模型 ... 46 圖 4.14 有無次電極下的開關順序對照圖... 47 圖 4.15 無施加電壓液滴內壓值 ... 48 圖 4.16 欲往方型電極移動瞬間之液滴相對位置初速度... 49 圖 4.17 開啟次電極後液滴內壓值 ... 50 圖 4.18 次電極釋壓後液滴相對位置初速度... 51 圖 4.19 不同面積比例之次電極(鋸齒狀電極)比對圖 ... 52 圖 4.20 開啟 0.5 倍液滴面積次電極之液滴內壓值... 53 圖 4.21 0.5 倍次電極釋壓後液滴相對位置初速度... 54 圖 4.22 開啟 1.8 倍液滴面積次電極之液滴內壓值... 55 圖 4.23 1.8 倍次電極後釋壓後液滴相對位置初速度... 56 圖 4.24 不同(0.5 倍、1.1 倍、1.8 倍)次電極面積下液滴內壓隨時間變 化關係... 57
符號表 0 未施加外部電壓時固-液界面之表面張力 c 單位面積之電雙層電容值 SL
固-液介面的表面張力 SV 固-氣介面的表面張力 LV 液-氣介面的表面張力 C 平行板之電容值 Q 電壓所產生之電荷 V 外部電壓 0
真空介電常數 r
介電層之介電常數 d 介電層厚度 Top C 上板電容值 Botton C 下板電容值 aP
為外界壓力 D 上下板距V
速度分量p
壓力
密度
黏滯係數 F
表面張力之體積力g
加於流體之等效重力f 液態容積分率 L
液體之物理特性 G
氣體之物理特性 mix 液氣混合密度 k 界面曲率 c t 每一 time step 下的最大時間步階值 c d 網格長度 cv
流過網格的速度值1
第一章 緒論
1.1 研究動機 近年來由於微機電(MEMS)製程技術的進步,藉由微機電製程能 將系統微小化的特性,使得原本需要大型儀器及生醫檢測相關知識才 能得知的訊息,在少量的樣本下可透過各式生醫感測晶片的分析及統 計,快速得到檢測結果,因而快速蓬勃發展。而由美國在 2003 年 3 月完成了 99.99% 正確率的人類基因解碼工作,正式宣布了後基因解 碼紀元的來臨。對於後基因解碼紀元的幾個重要的工作,包含新藥研 發(drug discovery)、藥物傳送(drug delivery)、DNA 蛋白質分析 (DNA、protein analysis)、基因表現(gene expression),開啟了生物 微機電工程(BioMEMS)及微流體力學(Microfludics)的起步。 而近年來生物晶片技術因此崛起,不僅提供了解決上述基因研究 上的問題,也帶動了全球基因功能分析自動化的風潮,加速了功能基 因研究的進度。其不僅對基礎研究造成深遠的影響,同時也對生物科 技產業產生微妙的效應,預期一場基因科技革命即將展開,而人類是 這波革命下的最大受益者。生物晶片技術與傳統生物科技的差別在 於:其分析靈敏度佳、專一性高、分析速度快,所使用的檢測樣品及 試劑少,並可一次實驗獲得整體性(平行化)的實驗數據。生物晶片最 大的優點在於微小化並可同時快速大量的處理樣品。 現階段發展的生物晶片大致可區分為微陣列晶片 (microarray chip) 與 實 驗 室 晶 片 (lab-on-a-chip) 兩 大 類 。 目 前 以 微 陣 列 晶 片 (microarray)發展較為成熟,而實驗室晶片及生命晶片將是未來發展主 要目標。實驗室晶片(lab-on-a-chip)又稱為微處理晶片,微流體晶片 (microfluidic chip)或微全分析系統(micro total analysis system),顧名思 義是以一個晶片來完成一般實驗室所進行之生化分析,利用半導體製 程、微機電等技術將小至幾個微升(microliter)甚至奈升(nanolilter)溶積 的液體,導入佈滿毛細管道的晶片中,讓液體在設計好之微小環境中 進行與實驗室中需求的相同反應。 由於近年來微機電技術進展迅速,將微縮技術運用到生化反應上 面,成為眾所矚目的課題。研究人員將分析化學實驗室中的儀器微小 化,並製作在平面化的晶片上,使晶片具有生化反應、分離與偵測等 功能。為了達到整合的效果,所以實驗室晶片上必須包含複雜的元 件,因此其製作技術是相當不容易的,但是對使用者而言卻是相對簡 單,使用者只要將檢體直接注入晶片當中,即可自動執行實驗的流 程,迅速得到結果。因此實驗室晶片(lab-on-a-chip)具有極大的潛力,在過去十年內, 吸引不少研究人員的投入,其相關研究論文的數量也快速的增加 [1-5]。在這領域的發展初期,主要研究著重於分析化學系統的微小 化,其應用大部份為 DNA 分析及蛋白質分析[6-8]。目前使用於高效 能篩檢系統,將來在 DNA 定序、基因製藥、表現模擬及診斷分析極 具發展潛力。由於微機電和奈米技術的快速進步,將繁複的生物檢驗 儀器微型化成為一片像郵票一樣大小之晶片上。一般預測實驗室晶片 勢必會逐漸取代部分傳統實驗室,因此具有相當之潛力。 而實驗室晶片主要在處理微流體,一般微流體控制晶片需要流道 來侷限住流體,生物試劑在流道裡面進行傳送、混合反應這些工作。 這些流道不可避免地需要有上蓋,卻也容易產生洩漏的問題。除此之 外,微流體流阻比較高,不容易以外加動力、壓力推動,而使用高壓 電場產生電滲透流的驅動方式並不是每一種反應都適合,因為不是每 一種反應都可以承受高電壓,使得流體的驅動與程序控制相當困難。 因此,不需使用流道結構、不需外加幫浦與可動閥門的數位微流體式 實驗室晶片 (又稱為液珠式流體晶片) 則可以避免這些問題,成為近 年廣受矚目的發展。 由於近年如此的蓬勃發展下,許多微流體系統被研究及發展來控 制微尺寸下的流體。在這些微流體系統中,有各種的方式可以用來驅 動流體,包含了電溼法(electrowetting)、靜電式法(electrostatic)、電泳 法 (electrophoretic) 、 電 滲 透 式 法 (electroosmotic) 、 熱 驅 動 法 (thermopneumatic)等。在傳統的微流體系統中是以微流道控制連續流 體為機制。由於微尺寸的因素,表面張力成為驅動流體的重要因素。 而現今改由驅動液珠形態的方式來驅動流體,則提供了一種能夠自動 化控制並利用更微量的液體來製作 Lab-on-a-Chip 晶片的願景。其中 利 用 電 濕 法 (electrowetting) 及 介 電 層 電 溼 法 (electrowetting on dielectric,EWOD)來控制液體表面張力並驅動液珠的方式,在近來的 研究中更是備受矚目。因在目前微小化的製程中,當晶片微管道越來 越小時,流體的流動便會因為流道阻力變大,而導致檢體的損耗以及 檢驗過程的不順暢,管道有可能會因此而阻塞,導致檢驗的失敗,我 們可以使用液滴取代流體,達到降低樣品成本、減少樣品的損耗的要 求,並且也可以提高檢測的準確性以及靈敏度。除此之外,液滴更可 以達到高通率的要求,在一塊晶片上只要有合適的電極驅動演算法配 合,便可以同時進行多樣的檢測,節省了重複檢測的時間與花費,基 於以上幾項改進方向,介電層電濕法的技術及應用在未來將會是相當 具有發展潛力的產業,便著手朝這個方向去發展研究。
1.2 研究目的 本文主要目的是將電濕法應用於數位微流體晶片上,藉由理論的 預測得知在不同參數下液滴的各項物理機制:運輸(transporting)、分 割(cutting)、以及取樣(creating)奈升級的液珠。而本文所模擬之結果 會先與實驗結果相互驗證,在確定模擬具一定趨勢性後,開始調整參 數如:流道間距、與電極形狀等,來找到產生奈升液珠各項參數的有 利條件,進而對於生醫領域有所貢獻。 1.3 論文架構 第一章序論:文中說明針對生醫微機電系統(BioMEMS)做一發展 的敘述以及其研究價值,並提出採用介電層電溼法(electrowetting on dielectric,EWOD)為主的驅動微流體方式作為本文研究的目的。第二 章文獻回顧與 EWOD 理論探討:藉由文獻回顧了解數位微流體的技 術發展,以及所依據之理論公式探討。第三章數值方法介紹:說明模 擬時所用理論與使用之數值方法。第四章結果與討論:將實驗與模擬 比對結果呈現,並對能產生奈升液滴時的各項參數條件下分別探討。 第五章結論與未來展望:對本研究做總結並對未來能加以應用及改進 之處做評述。
第二章 文獻回顧與公式探討
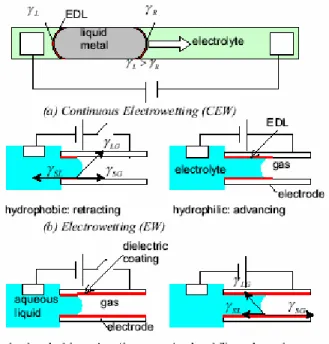
利用表面濕潤性來控制微小尺寸下之液滴研究,已有許多重要的 研究成果,其中不乏有利用各種改變表面張力方式來驅動微液滴的技 術。以下將各研究單位所做的成果加以概略性的呈述。 2.1文獻回顧 電濕法便是運用外加電壓來改變固體與液體間的接觸角,而電濕 法的概念是來自於 Lippman [9] 於十九世紀末所作的一個電化毛細 管實驗,他首先發現外加靜電荷可以改變界面上的毛細管作用力;後 來類似的觀念便被應於於電濕法上,當外加一電壓,改變液滴表面電 荷能量時,會使得液滴的潤濕性和接觸角改變,而由於電極表面疏水 性質已不同,進而改變液滴輪廓。 傳統上一般以連續流體的流動是以進出口兩端壓力差做為驅動 力量,而由於微尺寸的因素,表面張力成為驅動流體的重要因素。而 一開始由 Duke 大學的 Richard. B. Fair 團隊以電濕法利用液體和液體 之間的表面張力變化(Continuous Electrowetting)來移動在電解質中的 金屬液體(水銀)及在矽油中的水溶液,見圖 2.1。而 UCLA 的 C. J. Kim 則是利用液體及固體間表面張力的變化(Electrowetting,Electrowetting on Dielectric),成功的在空氣中驅動溶液。 2000年時,Duke大學的Richard. B. Fair團對提出了連續電濕法 (Continuous Electrowetting,CEW)的研究[10]。在兩平行玻璃上,各 定義出驅動電極(Chrome)及接地電極(ITO)。驅動電極再蒸鍍上一層 7000 Å的 Paralene當絕緣層,最後都旋佈上一層疏水性的鐵氟龍 (Teflon1600)。如圖2.2所示在矽油的環境下,能以20Hz的頻率40V-80V 的電壓來驅動氯化鉀液珠,可達到30mm/s的速度。 而以電能當做驅動液滴的方式是目前最為成熟的一種。我們可由 簡單的實驗來觀察這個現象。圖 2.3 當未施與供應電壓時,液滴在介 電層上方呈現疏水性,當施加電壓後,液滴因電荷累積而使得其接觸 角改變,呈現親水性(hydrophilic)。此現象稱為介電質材料上的電濕 潤效應(Electrowetting on dielectrics, EWOD) [11-15]。但當外加電壓上升時,接觸角會隨著變化直到出現飽和,此時接 觸角不隨外加電壓而改變,而約略維持在定值,稱為飽和接觸角。其 中交流電與直流電的飽和原因不盡相同,若外加電壓為交流訊號,則 飽和時在液滴尖銳邊緣與空氣交界處會使得空氣離子化,接著這些離 子會將液滴包圍,形成一親水環破壞掉介電層的斥水性,減弱電濕現
象然後停止電濕潤現象;若外加為直流電壓,則飽和時會在介電層內 產生受困電荷,接著同樣形成親水環破壞掉介電層的斥水性,造成電 濕法不可逆,此現象可藉由適當的介電質達成電濕的可逆性,但電濕 法的飽和現象不會因此而消除 。 因而 C-J Kim[16-17] 的團隊成功地將 EWOD 現象應用於微液滴 的傳送機制上,在鉑(Pt)製作作為底部電極後再覆蓋一介電層,此層 通常用具有絕緣性值的材料,以防止電流直接通過破壞介電濕潤現象 的可逆性,最後覆蓋疏水性(hydrophobic)介電物質 Teflon。當液滴跨 在多塊電極上時,若在右側的電極上施予電壓,致使液滴右邊的接觸 角改變,造成臨近兩個電極表面疏水性質因此不同,而表面張力的改 變導致液珠與外在環境有一壓力差,使得液體左右兩邊壓力不同,促 使液體向右邊移動。藉由此方法便可驅使液滴往各方向產生位移。 在微流體系統內,一般認為構成數位微流體控制需要四種基本驅 動方式 1 取樣(creating)、 2 運輸(transporting)、3 混合(merging)、4 分割(cutting)。其中最早提出這個研究的為 UCLA 的 C. J. Kim 團隊, 由圖 2.4 可知除了能做到這四種基本的驅動方式外,並設計出 N X M 棋盤式設計,藉由 X,Y 方向儲存槽,可在 N X M 的流道上進行各 式各樣試體及反應物的混合及驅動。 2.2基礎公式探討 介電層電濕法中,由文獻回顧可得知液體原在絕緣層所塗佈的疏 水性的材質上,因疏水性質致使液體與接觸角呈大角度的狀態,當加 入電壓後液體與固體表面間則有電荷累積,為了使表面能平衡因而液 珠則會有接觸角變小因而漸漸攤平的現象。而若是討論驅動力量則是 以表面張力(surface tension)做為主要關鍵,可由臨近兩個電極表面疏 水性質不同導致液珠內外壓力差,進而驅動液珠。而由接觸角的變化 可以得知表面張力的大小。因此瞭解不同材料上不同試體的接觸角與 飽和接觸角的現象,可做為設計及發展控制微流體系統元件的基礎。 以下即探討控制EWOD各物理現象之公式。
2.2.1 電雙層(electric double layer)
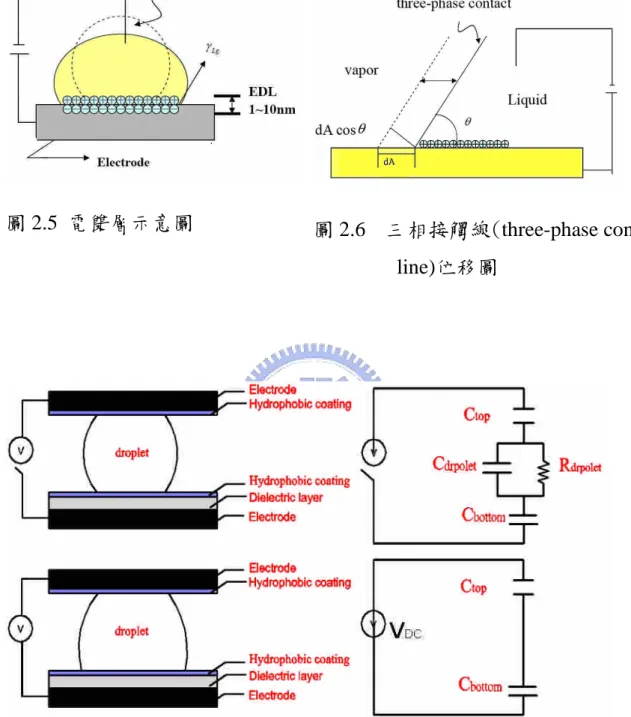
若電極浸於液體內或是在兩者有接觸面之條件下,此時當給一外 部電壓,則液體中會吸引相反的電荷靠近電極,在固-液界面上則會 出現排列整齊的電荷,如圖 2.5 所示這種情況類似於兩平行板的電容
器 (parallel plate condenser) 現 象我 們稱 之 為電 雙層 (electric double layer) 。 2.2.2 Lippman's Equation 當液滴以平衡狀態在一平面上時,此時系統是處於最小表面積狀 態,若想使液體表面積增加則必須要做功,使更多液體內部分子獲得 能量而處於表面,通常界面上能量則是以 surface tension (N/m) 或是 surface free energy (J/m2) (
)來表示。而根據 Lippman 於十九世紀末所作的電化毛細管實驗,他首先 發現外加靜電荷可以改變界面上的毛細管作用力所推導的 Lippman's Equation: 2 1 0 2
cV
(2.1)在 EWOD 的現象下 Lippman’sequation主要是討論外加電壓與表 面張力的關係式。在公式中所討論的是在未施加外部電壓時固-液0 界面之表面張力,c 則是單位面積之電雙層電容值(c=C/A).,外部電 壓則是以 V 表示。
2.2.3 Young’sEquation
而在探討接觸角與表面張力的關係式中,可由1805所提出的 Young’s Equation 得 知 。 此 方 程 式 可 根 據 三 相 接 觸 線 (three-phase contact line)的位移與三個界面的接觸角(contact angle) 固-液、固-氣、 液-氣所決定的。 根據圖 2.6 假設系統自由能為(F)則可寫成下列方程式[18] [19]; cos SL SV LV dF dA dA dA dU dW (2.2) SL :(固-液界面的表面張力) SV :(固-氣界面的表面張力) LV :(液-氣界面的表面張力)。
cos則是固-液與液-氣界面在三相接觸線(three-phase contact line)下 所夾之角。若無外部電壓的給予且系統能量已達平衡則dU =dW =
0 ,dF/dA = 0,則可推導出Young’sEquation:
cos
cos
SL SV LV SV SL LV
(2.3) 而 當 給 予 外部 電壓 , 因 介 電層 的狀 況 是 類 同於 兩平 行 板 電 容器 (parallel plate condenser),此情況則會儲存能量,而根據基礎電學理論 被儲存的能量可以寫成: 2 2 2 ( ) 1 2 2 2 Q CV U CV C C (2.4) C:平行板之電容值 Q:因電壓所產生之電荷 V:外部電壓 而dU dA 可視為當有一外加電場下介電層每單位面積所儲存的能量, dW dA 則是每單位面積外加電場所作之功。 2 0 2 1 1 2 2 r dU cV V dA d (2.5) 2 0 r d W V d A d (2.6) 我們將上述兩項dU dA 、 dW dA 合併,令 EW dW dU dA dA ,帶回Young’s Equation :cos ( )
LVv
SV SL EW
(2.7) 2 0 2 1 1 2 2 r E W dW dU cV V dA dA d (2.8) 0 :真空介電常數 r :介電層之介電常數 d :介電層厚度 c :單位面積介電層電容= r 0 d 將(2.7)、(2.3)相減即可得到 Lippmann–Young equation:2 2 1 2 0 1 cos cos 2 SV SL SV SL V LV LV LV cV cV (2.9) 2.2.4 EWOD於兩平板下之等效電路 當一液滴被限制於兩平板間。欲了解EWOD在此條件下接觸角的 機制,可將等效電路形式表現於圖.2-3。下方為當給予DC電壓時 EWOD在兩平板間電容與電壓之關係式; T o p B o tt o n D C T o p D C B o tt o m D C Q C V Q Q V V V (2.10) Top BottonDC DC Botton Top C V V C C , TopDC Botton DC Botton Top C V V C C (2.11) Top C :上板電容值 Botton C :下板電容值 由平行板電容公式可知當 d(厚度)愈小時其值越大,而由圖 2.7 知道上 板電極只具一極薄的疏水(hydrophobic)層與下板相比,其厚度遠不如 下板。此刻CTop遠大於CBotton,由基本電路學理論可得知VBottonDC>>VTopDC
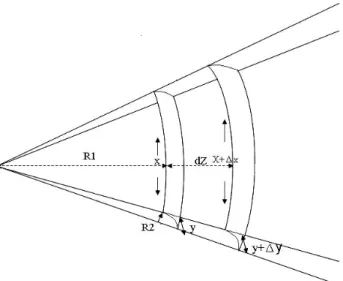
壓降幾乎是在下板,故施加 DC 電壓時上板的液滴接觸角幾乎不會改 變。 2.2.5 驅動力(Actuation Force) 液滴於相異斥水程度表面產生之驅動力主要是靠著液珠上的表 面張力梯度。由熱力學平衡,則液滴與周圍空氣之間接觸界面必須遵 守Laplace-Young方程式(1990),根據圖2.8我們可推導方程如下:
1 1 1 2 2 2 2 1 1 2 ( )( ) ( ) ( ) ( ) 1 1 ( ) dA x dx y dy xy xdx ydy dw dA xdx ydy dw pxydz x dx x xdz dx R dz R R y dy x ydz dy R dz R R dz dz pxydz xdx ydy xy xy R R p R R
公式(2.12)中R1、R2 為液滴曲面上之曲率半徑,p則為液面與空 氣之壓力差。若要使液滴產生表面張力梯度,即表示液滴須至少有兩 種不同濕性的接觸面,而令液滴與疏水性較強的表面周遭空氣所產生 之壓差為p1,與疏水性較弱的表面周遭空氣所產生之壓差為p2,此 時液滴會有一淨壓差,憑此壓差則可驅動液珠,而由於p1>p2,故 液滴會自發性的由疏水性的強表面往較弱的表面驅動。 如圖 2.9 所示若液體位於距離為 D 的上下兩平板之間,上下板之 液滴接觸角分別為cosTop、cosb0,當右下方電極板施加電壓,此時下 板右方的表面張力與sl b則因此變小,淨壓差因此驅策液滴往接觸角 較小的方向移動。 經整理後,液滴左方之壓力差為[20]: 0 (cos cos ) LG L a T b P P D (2.13) a P:為外界壓力 D :上下板間距 液滴右方之壓力差為: (cos cos ) LG R a T b P P D 淨壓力差為: (2.12) 122)0 2 0 (cos cos ) 1 (cos cos ) 2 LG L R b b b b L G P P P D cV 2 1 2 L R cV P P P D (2.14) 由公式(2-14)不難看出,除了接觸角的變化可以影響壓力差外, 施加的電壓值、上下兩板間距與液滴特性等都可影響其本身在介電材 料上之驅動力,而給予可控制的外加條件下,P 愈大則液滴越容易 移動。 2.2.6 Droplet cutting 液滴的分割主要是藉由當液滴所覆蓋的兩側電極同時給予電 壓,而中間電極仍保持原狀態,此時兩側電極與液滴接觸部分則產生 電濕潤現象,中間部分仍屬於疏水性,此時電濕潤部分則因壓差的產 生,使液滴各向兩側移動,致使原液滴半徑造成頸縮(necking)而切割 為二。 根據圖 2.10 我們最後將流道間距、角度變化與液滴半徑關係式 表示如下: 2 2 2 1 1 1 (cos b cos b ) R R R d (2.15) 根據關係式與圖 2.10 我們可以發現R1若因頸縮使液面曲率產生反方 向的內凹,此時R1因曲率方向改變呈負值,也就是當R2/R1<0 時, Droplet cutting 的動作才會出現。而由文獻[16]我們可得知若R2/R1值為 -1 時洽可為使液滴分離的半徑比值,在藉由上述關係式我們可得知要 能使液滴分離(cutting)時的流道間距極限值推估如下: 2 2 1 (cos b cos b ) 2 R d 2 2 1 (cos cos ) 2 b b R d (2.16) 1 cosb :無施加電壓下之接觸角 2 cosb :施加電壓下之接觸角 d :流道間距
其中cosb1為已知,而cosb2可由公式(2.9)中求得,R2最小值應 至少取一半的電極邊長,因液滴若置於方形電極下的正中央,其半徑 長至少須跨觸兩側電極。則在本研究模擬前已先可推估流道間距極限 值即可作為在模擬下的參數條件。
圖 2.1 以電濕法來移動在電解質中的金屬液體(水銀)
(a) 液珠接觸角與各表面張力[5] (b)液珠在電場下的潤濕性變化[5]
圖2.3 介電質材料上的電濕潤效應
3
圖 2.5 電雙層示意圖
圖 2.7 EWOD 於兩平板下之等效電路
圖 2.6 三相接觸線(three-phase contact line)位移圖
圖 2.8 Laplace-Young 方程式推導示意圖
4
5
圖 2.10 多視角液滴分離(cutting)示意圖[16]
第三章 數值方法介紹
本章節理論分析主要說明,當EWOD效應發生時,從流體力學角 度下探討其液珠的各種物理行為[21],因介電電濕潤效應(EWOD)主 要是由上述2.2.6節所談的驅動力(Actuation Force)造成液滴兩邊曲 率半徑的不同出現淨壓力差,故驅動液體往曲率半徑已改變的一方移 動。在EWOD現象中,將實驗過程所設定之參數與製程條件帶回 EWOD理論公式裡,所得之值可用於以流體力學觀點下作為模擬時所 需 之 邊 界 條 件 與 環 境 設 定 等 。 故 此 本 章 節 我 們 整 合 商 用 軟 體 CFD-ACE+將利用其數值理論來重建EWOD效應發生時液珠各項的 物理行為。 3.1 理論分析 本研究中理論分析的目的是在模擬,當EWOD效應發生時液珠的 運動行為,並探討不同電極尺寸、流道間距及受電壓後所改變的接觸 角等因素對於液珠運動所造成的影響。基於連續(Continuity)與動量 (Momentum)方程式,以及應用半隱式壓力連結法[22](Semi-Implicit Method for Pressure-Linked Equations Consistent ,SIMPLEC Mothhod) 此數值方法主要是求出網格內的壓力場及速度特性。而位於液氣界面 則是用連續表面張力模式(Continuum Surface Force, CFS, Model)[23] 來模擬表面張力對於界面行為的影響。並利用連續分段的界面重建之 數值法,精確的決定網格內的界面位置與移動方向。 3.1.1 統御方程式 本研究理論模型是以連續和動量方程式為兩種不可壓縮且不互 溶流體運動方程式,以求解全流場之速度與壓力。流場的基本假設如 下: 1.工作流體為牛頓流體(Newtonian Fluids)且為不可壓(Incompressible) 之流體。 2.層流(Laminar Flow)流場。 4.不考慮物體力(Body Force)。 5.壁面與流體之間無滑移現象存在 統御方程式(Governing Equation): 由以上的假設,我們可以推得所需的統御方程式如下:連續方程式:
V 0 t (3.1) 動量方程式: ( ) 2 u p u v u u Vu t
x x
x y
x y x x u w F a z z x (3.2) ( ) 2 u p v u u v Vv t
y x
x x y
x y y v w F a z z y (3.3) ( ) w p u w v w w Vw t y x z x y z y 2 w Fz az z z (3.4) 其中V、p、、分別代表速度向量、壓力、密度及黏滯係數,F項 包含液氣界面之表面張力效應,而g項為施加於流體之等效重力。 上述動量方程式中,表面張力效應係採用連續表面張力模型而 構得[23]:ˆ
skn
F
(3.5) F 微表面張力之體積力,在 x、y、z 軸上之分量分別為Fx、Fy、 z F , s F 為每單位面積上的表面張力,是由界面的正向與切線方向 所組成,表面張力值,k
n
ˆ
平均界面曲率(Mean Interface Curvature),nˆ為介面之單位向量,詳細內容參件 Brackbll 等人論 文[24]。藉由上述連續表面張力模型即可完整表示動量方程式中的 表面張力項。 3.2 數值方法 一般在流體力學的數值計算中較為常見的分析計算方法有:有限差分法(finite difference method, FDM)、有限元素法(finite element method, FEM)及以有限體積法(finite volume method, FVM)等,本研究 則是利用有限體積法(finite volume method, FVM)來處理理論模型中 的統馭方程式。 此 法 之 精 神 是 當 我 們 在 考 慮 問 題 時 , 必 須 遵 守 守 恆 律 (conservation law)的原則,如此則可知道在網格中心之物理量與進出 網格面之物理量之間的關係,亦是達到每一塊網格的物理量守恆特 性。這是有限體積法最大的優點,尤其是在一般座標系的轉換時,此 法便顯得更具有物理的意義,尤其在高曲率之網格,亦可保持物理量 之守恆,因而有限體積法目前盛行,但其在邊界點較不好處理是為小 缺點。 在以數值方法求解時,首要之務便是將控制方程式做數值離散 化,而在何處須加以離散,則是一重要的選擇。且於受到計算精確度 及記憶容量、計算速度的限制,所以選取足夠解析流場物理現象之格 點數目,以及將此有限的格點依解析度要求做適當的安置,便是格點 產生時須加以考慮的重要方向。 目前運用在數值上的格點產生法大體上約可分為兩類,一為規則 格點(structural grid),其二為不規則格點(unstructural grid),所謂規則 格點正如字面所示,其格點之排列具有規則性,而不規則格點僅知道 其位置與相鄰各點的相關位置,一般規則格點之格網多為四邊形(2D) 或立方體形(3D),而不規則網格則大多是三角形(2D)或四面體(3D)之 格網。當藉由規則格點所建立出來的網格則為方形結構性網格。在此 同時,欲觀測的流場產生某些物理性質改變劇烈及不確定的地方,此 時原來的格點若在此處的分布不夠細密時,則對此處物理量之結果顯 示的較粗糙,故有需要在此地方作較細密的格點,但其缺點則是在複 雜流場的格點製造不是很方便。而不規則網格上,人們便想到利用有 限元素法中網格可成任意形狀之特性來製造格點,而目前形狀若在二 維則為三角形網格以及在三維則是三角錐網格,相較於結構性網格則 較容易控制格點疏密,但缺點為需要消耗較多的記憶體容量來儲存格 點間對應關係。 3.2.1 SIMPLEC 法 在使用原始變數法求解不可壓縮流場最早期者當為Harlow & Welch (1965)所提出的MAC算則,此法是將動量方程式(momentum equation)做散度(divergence)處裡,然後相減求得壓力項之Poission形 式之控制方程式,再配合連續方程式來求解,此法的缺點在解Poission
方程式時所花時間過久,故SIMPLE法算則應運而生。
SIMPLE法是(Semi-Implicit Method for Pressure Linked Equation) 的簡寫,此法基本精神在求穩態解時,僅需將壓力控制式在每個時距 作數次迭代,得到之近似壓力項便可做為下一步修正之用。 由上節所提到本文將以有限體積法來處裡偏微分形式之統御方 程式外,在數值方法中則是採用Van Doormal等人所提出之SIMPLEC 演算法,來處理數值中壓力與速度的分布。而與上述SIMPLE法不同 處 則 是 , SIMPLE 法 本 身 會 忽 略 鄰 近 格 點 速 度 修 正 的 影 響 , 而 SIMPLEC則修正此缺點,使忽略鄰近格點速度修正的影響降至最 低,詳細數值推導請參閱[22]。 SIMPLEC 法流程(如圖 3.1 所示)與敘述 1.設定一初始壓力值
p
0 2.由離散後之動量方程式求出三維方向上的預測速度 u、 v、 w 3.再由壓力修正式求出壓力修正值 p 4.由p0、p之和解出修正後的壓力值p 5.再由速度修正式求出修正後之u、v、w 6.最後將步驟 4 所求出的壓力值帶回步驟 1 當作下一步的初始壓力值 0 p ,重複至步驟 2 依此循環直至達收斂標準。 3.2.2VOF-PLIC 而在界面追蹤之數值方法上,本文是採用 Pillod 等人[25]提出 VOF-PLIC 演算法。此法是利用網格內當兩種不相容且不可壓縮兩流 體界面所截斷的網格體積來計算網格此時的容積分率,當容積分率值 為 1 時,所代表的意義則為網格內完全充滿液體,而容積分率值為 0 時表示為網格內完全充滿氣體,若值介於 0 與 1 之間則表示網格內同 時含括液氣兩流體,通常我們定義兩不相溶流體交界面處其容積分率 值為 0.5。 在藉由方程式求出速度及壓力場後。藉由下列流體體積方程式可 用來求得新時間下的界面網格內容積分率(f)。 ( ) 0 f V f t (3.6) f:容積分率 當計算網格內同時存在兩種流體時,此網格內流場的物理性質將視為均一流體,根據該格點之液態容積分率,以線性內插決定如下:
mix G G L L f f 1 (3.7) 為計算網格之平均速度、壓力或黏滯係數等特質,而
L、
G 則 分別代表該項特性之液體和氣體值。mix 是混合密度,係利用容積 分率計算如下:
G L mix f f 1 (3.8) 而目前在界面重建的數值方法上,主要是以 SLIC 法(Simple Line Interface Construction)[26] 與 PLIC 法 (Piecewise Line Interface Construction)[27-28]最為普遍。若有一弧形界面,在 SLIC 法的呈現 上是利用網格內所占的容積分率以及正交網格之直線來重建弧形界 面,PLIC 法則是利用相切於網格界面之線性直線將界面重建出來。 如圖 3.2 我們可判斷在同一網格數下 PLIC 法較 SILIC 法有更佳的界 面重建精準度。在本研究中我們則採取 PLIC 法作為在 EWOD 效應 產生時模擬流體界面之數值方法。 3.2.3 網格與時間解析 若用數值計算所得之數值解要知道其準確程度,則須了解時間與 格點的解析概念,以確保不會因時間步階與網格的疏密進而影響結 果。基本概念為當物理量傳遞的速度是沿著網格傳遞,同時間則會受 到網格密度與 CFL 值的限制,網格太密或是 CFL 值太小則傳遞速度 減慢,同時計算時間相對變長。同樣道理,若格點給的太過鬆散在細 微結構的物理量則會無法呈現。而在本研究中在數值分析時,其時間 的設定是採用自動時間步階(Auto time step),用此設定下,每一網格 的尺寸、流進網格內的流體流速與流量等因素都會自動影響每一步的 步階時間。關係式如下: c c c d t CFL v (3.9) 上式中tc為每一 time step 下的最大時間步階值,dc為網格長度,vc 則 為此時流過網格的速度值,當每次時間疊代將會已最小值作為共同 c t 基準,因而 CFL 值將影響時間解析度,當然 CFL 值越小則在時間 解析度上則越高。但會影響計算時間。通常在比照在不同 CFL 值的設定值時,經驗上是給予 0.1、0.05 來比較是否會因步階時間影響液 滴界面結果。本模擬在時間解析測試後發現在 CFL 值 0.1 與 0.05 下 的結果並無太大差異,故選用 CFL 值 0.1 為設定基準值。
Guess Initial Pressure p0
Solve u v wby Momentum Equation
Solve P form P=
Solve U , V , W by Velocity Correction Equation
Residual< 0 p p 4 10 Converge YES NO Solve Pressure correction
p
SLIC 界面重建法
PLIC 界面重建法
第四章 結果與討論
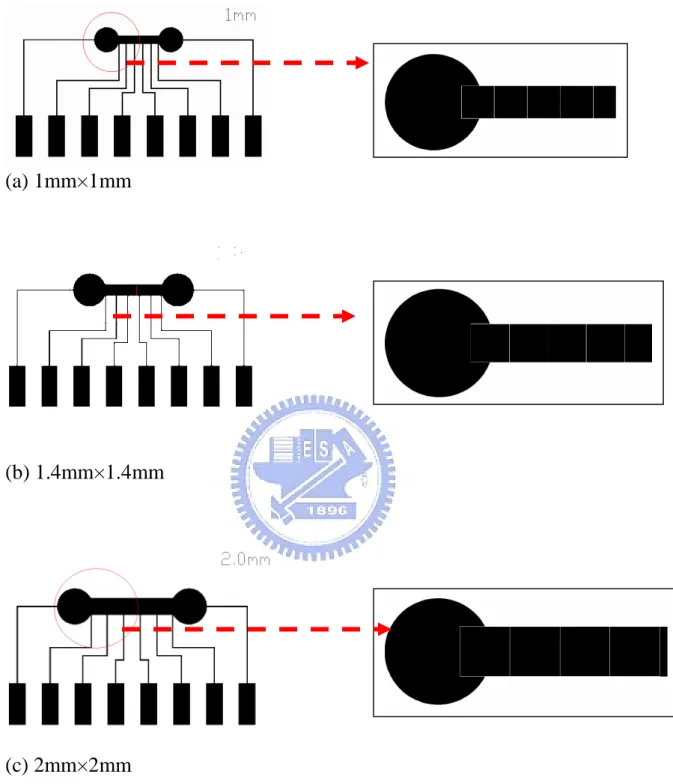
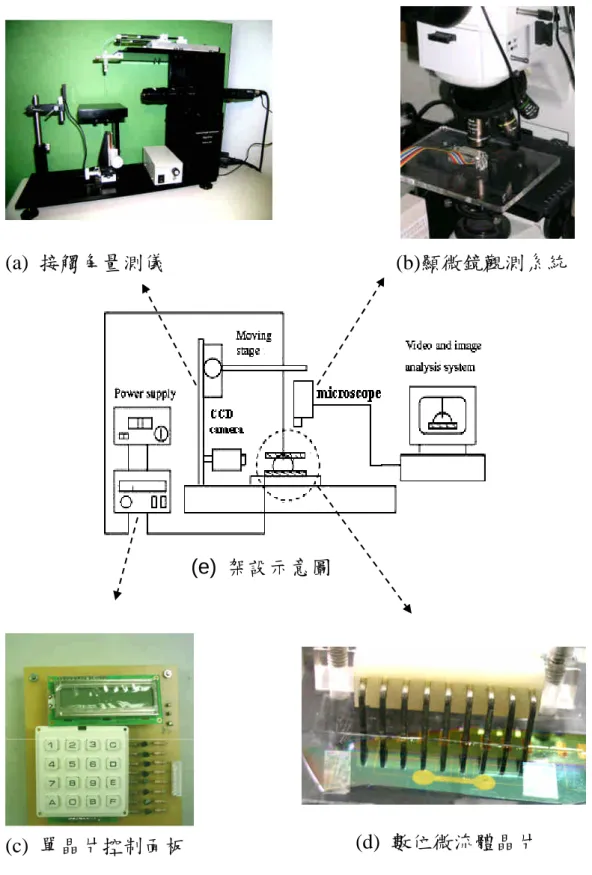
由前述三維暫態數學統御方程式,配合初始與邊界條件(initial and boundary conditions),再經過SIMPLEC與VOF-PLIC數值運算程序 以模擬液氣界面時變運動行為。本研究開始討論初始狀態在未受任何 影響力下,液滴靜止且平整被拘束在EWOD實驗的試片元件內。而重 力在微小尺度時的液滴分析上,影響力遠不及液滴自身表面張力,因 而本研究則予以忽略其重力在物理機制上的影響。本章節主要目是用 EWOD效應抽離出一單液滴時,模擬各種不同參數條件下的探討,藉 由結果以找出有利的條件來預測實驗上的各種行為。 4.1 網格模型建立 由圖4.1EWOD的元件光罩圖,我們可知其方形電極尺寸分別都 控制在1.0 ㎜、1.4 ㎜、2.0 ㎜的邊長下,而兩端圓形電極則相當於 是原初始液滴的乘載電極,尺寸半徑分別為1.5 ㎜、2.0 ㎜、2.1 ㎜, 而電極與電極間的間距(gap)則是控制在20 以防止電極間的導m 通。而我們根據圖4.1依照原尺寸建立數值模型,並依條件或參數需 要來選取不同的模型來做模擬。但有所不同的是因數值分析時網格的 建立只需液滴所在的運動範圍(即圖4.1劃圈部分),為節省計算時間, 本文取元件光罩圖前半段約第4個方形電極下來作為全尺寸的網格分 佈,如圖4.2。 4.2 實驗量測流程 實驗設備規劃,主要可分為以下幾大項;數位微流體晶片的製 備,接觸角量測平台、單晶片數位式控制等部份。在晶片的製備部分, 事前先將所需要控制的參數規劃好,如:介電層厚度及所用材料 (SiO2、nitride..)、流道間距、在光罩設計時所需考慮的電極形狀尺寸 等,之後在製程上審慎的將晶片製作完成。而在實驗中使用接觸角量 測儀,主要是觀測液珠在受測時之角度變化,其架構主要是由三軸式 移動平台、CCD-Camera 與影像擷取系統所組成,當液珠完成移動或 是其他物理行為,影像擷取系統將把所拍攝的資料儲存,例如量測後 得知的接觸角(contact angle)、液滴變化的反應時間等,方便與之後理 論對照。在單晶片(ATmega8535)數位式控制部份上,可藉由數位訊號 的輸入來控制任何一電極的通電與否,進而讓使用者方便操控液滴的 介電濕效應。將實驗系統架設完成後並做拍攝位置校正以及確保電極 在控制上的穩定。圖 4.3 為實驗設備與架設示意圖。實驗步驟如後,
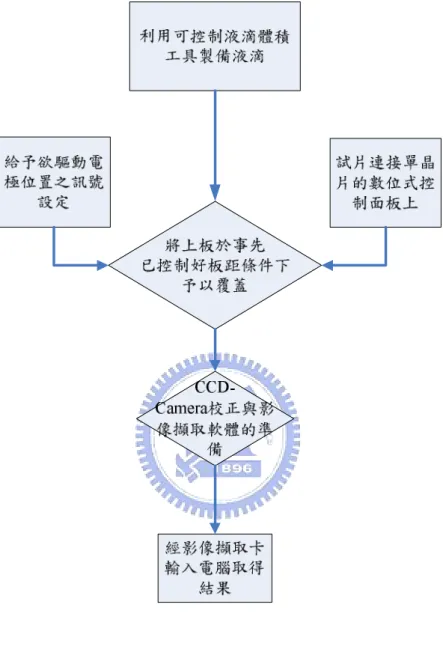
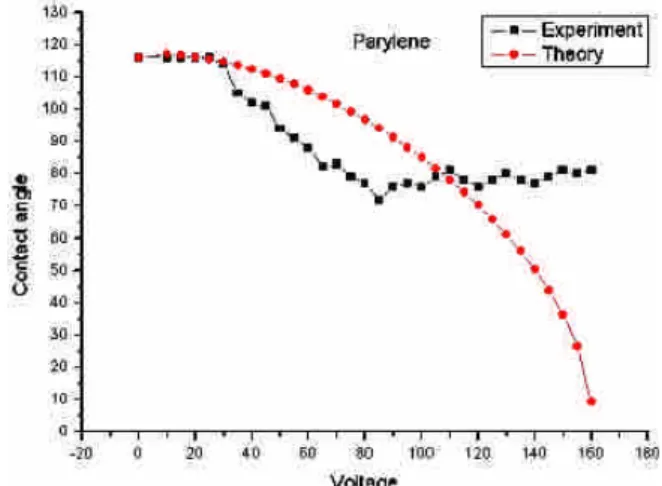
先用注射滴管在可控制液滴體積的情況下,將其滴置在已準備完成的 待測晶片上,再將上板於事先已控制好板距條件下予以覆蓋,而後則 將試片連接單晶片的數位式控制面板上,並給予欲驅動電極位置之訊 號設定,最後做顯微鏡觀測系統校正與影像擷取軟體的準備後,隨即 施加電壓並觀測液滴在晶片上的各種驅動現象。實驗結束後將數位攝 影機(CCD camera)所錄影像經影像擷取卡輸入電腦取得照片,並以每 秒 30 張的速率輸出,每張相片時間間隔約為 0.033 秒。根據圖 4.4 所示即為實驗流程。 4.3 理論模型與實際結果比對 本節中藉由接觸角的理論值推估以及數值模擬中液滴位置因隨 時間變化等結果來與實際現象比對。 4.3.1接觸角理論值與實驗比對 在前述公式探討及文獻我們可由其中發現,實驗時飽和接觸角的 存在,而根據接觸角量測儀進行觀察在施加電壓下接觸角的變化,並 與理論值比對。所取得之晶片參數如下: 介電層材料為parylene C 真空介電常數 :0 8.85 10 12( / )F m parylene C介電常數: r 2.48,厚度d=30000 Å 鐵氟龍介電常數 :r 2 ,厚度d=500 Å 液氣界面表面張力 :LG 0.0719(N m/ ) 未施電壓時與鐵氟龍接觸角為: 0 0 117 介電層材料為二氧化矽 真空介電常數 :0 8.85 10 12( / )F m 二氧化矽介電常數 : r 3.8,厚度d=3000 Å 鐵氟龍介電常數 :r 2 ,厚度d=500 Å 液氣界面表面張力 :LG 0.0719(N m/ ) 未施電壓時與鐵氟龍接觸角為: 0 0 117 介電層材料為氮化物(nitride) 真空介電常數 :0 8.85 10 12( / )F m
氮化物介電常數:r 7.8,厚度d=3000Å 鐵氟龍介電常數:
r 2,厚度d=500Å 液氣界面表面張力:LG 0.0719(N m/ ) 未施電壓時與鐵氟龍接觸角為: 0 1170 根據平行板電容串聯公式我們可求出鐵氟龍與Parylene C、二氧化矽 或氮化物(Nitride)串聯後之電容: 1 21
1
C
c
c
(4.1) 1 c :為Parylene C、二氧化矽或氮化物(nitride)之電容, 2c
:為鐵氟龍之電容 C :最後總電容 根據上述實驗參數帶入公式: 0 r c d (4.2) 2 12 (2)(8.85 10 ) 500 Ac
parylene C: 氮化物(nitride): 1 12 (2.48)(8.85 10 ) 3000 Ac
1 (7.8)(8.85 10 12) 3000 Ac
二氧化矽(oxide): 1 12 (3.8)(8.85 10 ) 3000 Ac
經計算後得parylene C、二氧化矽、氮化物(nitride) 總電容分別為: Parylene C C = 7.17 10 6 (F/m2)Cnitride = 1.39 10 4(F/m2) Coxide = 8.5 10 5 (F/ 2 m ) 將CParylene C、C nitride、Coxide值帶入公式(2.9)中,我們可在已知的施加電 壓值下推岀cos v 的理論值,反之也可預測欲得到cos v 時之最小電 壓。圖 4.5 分別為 parylene C、氮化物(nitride)、二氧化矽(oxide)理論 與實驗量測接觸角之比對圖。由圖中可發現,實驗接觸角約由 117 度 變化至 75-80 度左右即達到極限值,不會再繼續變小即達到飽和接觸 角。 4.3.2 數值模型與實驗對照 (1) 傳輸(Transporting) 為了探討在數值模型與實驗比對中,每一相同時間點下位移與時 間的關係,圖 4.6 是在比較當氮化物(nitride)為介電層,厚度為 d = 3000 A,並給與 40v 的電壓、流道高度 70 m、電極邊長為 2 ㎜為條件 下,數值模型與實驗對照圖。在原本無任何電壓下液滴呈現圓形並任 何形變,再下一時段右方電極開始給予電壓,液滴因 EWOD 現象產 生壓差故而向右驅動。 (2) 分離(Cutting) 圖 4.7 是在比較當氮化物(nitride)為介電層,厚度為 d=3000 A , 並給與 60 v 的電壓、流道高度 70 m、電極邊長為 2 ㎜為條件下, 數值模型與實驗對照圖。在原本無任何電壓下,液滴呈現圓形並無任 何形變,再下一時段左右電極開啟,液滴因此向左右兩側驅動,中間 電極則因頸縮現象而使液滴分離。 (2) 奈生液滴取樣(Creating) 圖 4.8 是在比較當氮化物(nitride)為介電層,厚度為 d=3000 A , 並給與 60 v 的電壓、流道高度 140 m、電極邊長為 2 ㎜為條件下 數值模型與實驗對照圖。當原液滴由圓型乘載電極抽出至第三電極 時,則圓形電極與第 1、3 電極開啟並關閉第 2 電極,而後即開始產 生出奈升液滴。表 4.1 數值模型建立之參數表。
表 4.1 模型建立之參數表 方型電極尺寸(㎜) 2 ㎜×2 ㎜ 流道高度(m) 70 液體表面張力(N/m) 0.0725 液滴黏滯係數( 2 m s ) 1.004E-06 液滴半徑(mm) 1.2mm 液體密度( 3 kg m ) 998 總網格數 18144 傳輸模型 邊界條件假設經 40V 電場改變 Contact angle 117~90 度 方型電極尺寸(㎜) 2 ㎜×2 ㎜ 流道高度(m) 70 液體表面張力(N/m) 0.0725 液滴黏滯係數( 2 m s ) 1.004E-06 液滴半徑(mm) 1.2mm 液體密度( 3 kg m ) 998 總網格數 18144 分離模型 邊界條件假設經 60V 電場改變 Contact angle 117~80 度 方型電極尺寸(㎜) 2 ㎜×2 ㎜ 流道高度(m) 140 液體表面張力(N/m) 0.0725 液滴黏滯係數( 2 m s ) 1.004E-06 原液滴半徑(mm) 2.4mm 液體密度( 3 kg m ) 998 總網格數 27972 液滴取樣 模型 邊界條件假設經 60V 電場改變 Contact angle 117~80 度 4.3.3 取樣(creating)模擬結果與理論公式對照 根據公式(2.15)將流道高度、角度變化與液滴半徑關係式我們知 道為: 2 2 2 1 1 (cos b cos b ) R R R d
而藉由 2.2.6 節我們可利用推導出來的公式進而可預測液滴取樣 (creating)時的板距極限,然而也就是判定再最少需要多少流道高度下 才能有液滴取樣(creating)的運動機制,最後並與數值模型加以比對以 符合理論公式與數值比對下的吻合性。 我們建立尺吋為 1 ㎜×1 ㎜的電極模型,並將流道間距控制在 140 m 以及 210 m,邊界條件經電場改變的角度為 117 度~80 度,帶 入公式(2.16)計算如下: 2 R =一半的電極邊長約 0.5 ㎜ 0.5 (cos 80 cos117) 2 0.5 (cos 80 cos117) 153 2 d d m 由理論公式求得當流道間距須 153 m以下時液滴取樣(creating) 的運動機制才會出現。圖 4.9 為數值模擬尺寸為 1 ㎜×1 ㎜的電極模 型及流道間距為 210 m計算後的結果。圖中因開啟方型電極已先將 原 1.5 的液滴由圓形乘載電極拉出置第 3 個電極處後,此時將圓 形電極與第 1、3 電極開啟並關閉第 2 電極,而由液滴隨時間步進結 果可發現,因第 2 電極處液滴頸縮部分因壓力差不足,液滴此時所產 生的壓差無法將取樣(creating)機制完成,此狀態的液滴將會被拖回至 圓型電極內。 圖 4.10 相同條件下只將流道間距改為 140 m時所做的數值計 算,當流道間距條件<153 m的理論預測值時,液滴取(creating)行為 則開始發生,此時可成功取樣液滴體積約為 140 nl,由圖 4.9、4.10 得知,模擬結果與理論公式比對仍距一定吻合性。 而圖 4.11、圖 4.12 則是呈現液滴在被取樣(creating)時,液滴在 140 m 與 210 m兩流道間距下頸縮部分的 y 軸方向壓力差,並可明顯 看出流道間距為 140 m時壓力差有顯著上升,也根據圖 4.12 在第 2 電極處的 y 軸方向上有最大壓差 300 N/ 2 m 的瞬間能產生液滴取樣 (creating)行為。表 4.2 為取樣型幾何形狀尺寸與物理參數對照表。
表 4.2 取樣模型幾何形狀尺寸與物理參數對照表。 流道高度(m) 210m 總網格數 52488 取樣前體積() 1.48 模型 1 取樣後體積( n) 無 流道高度(m) 140m 總網格數 27040 取樣前體積() 0.3 模型 2 取樣後體積( n) 140 n 方型電極尺寸(㎜) 1mm×1mm 液體表面張力(N/m) 0.0725 液滴黏滯係數( 2 m s ) 1.004E-06 液體密度( 3 kg m ) 998 邊界條件假設經電場改變 Contact angle 117 度~~80 度 液滴初始設定圓心位置座標(m) x=-0.008m、y=0.005m、z=105E-06m 4.4 電極設計對液滴取樣(creating)影響分析 對於液滴取樣(creating)過程中可呈上節所知,流道間距除了決定 取樣機制是否可行外,也直接影響了取樣時液滴體積,若流道間距變 小則所抽取之體積也相對減小,但此同時流阻則會因此增加造成在抽 取時的困難,本節將設計一電極模型可使液滴在取樣時來抵抗流道高 度變小時所帶來的流阻。 4.4.1 次電極設計概念 圖 4.13 可看出在主圓形乘載電極中鑲嵌另一個次電極(鋸齒狀電 極)網格模型,其目的是要再做抽取動作前先給予一電壓值,始液滴 因電濕潤現象而使外型改變與內部壓力因內聚力減小而降低,而後開 啟尺寸為 1.4 ㎜×1.4 ㎜的鄰近方型電極同時關閉次電極,屆而釋放液 滴內部壓力而產生較大壓差後,致使液滴移動時初速度增加來抵抗流 道間距變小時所帶來的流阻。圖 4.14 為有無次電極下,模擬時電極 之開關(on and off)順序對照圖。
圖 4.15 為無次電極下取局部網格中設有 440
n
液滴、流道高度 140 m,在未受施加電壓時液滴內部的內壓值。圖中AA為 x 軸向座 標上的截線,而圖 4.15(b)為此截線上液滴內部相對位置壓力圖,其 值約為 500 N/ 2 m 。 當鄰近尺寸為 1.4 ㎜×1.4 ㎜方型電極開啟後(邊界條件經電場改 變產生電濕現象 Contact angle 117 度~~80 度),液滴因接觸角改變開 始右移,此時圖 4.16 因壓差使液滴欲往方型電極移動(約在 x 座標軸 為 0 處)所產生最大初速度值約為 0.09 m/s。 圖 4.17(a)取局部網格內部設有次電極以及相同體積 440n
及相 同流道高度條件下,液滴在次電極開啟後其內部的壓力分佈圖。此時 因邊界條件經電場改變產生電濕現象(Contact angle 117 度~~80 度), 內聚力因而銳減。圖 4.17(b)為BB截線上的內壓值呈現 300 N/m2,並 產生液滴的形變。而後關閉鋸齒狀電極將液滴內部釋放回未施與電壓 前的內壓,並同時將鄰近尺寸為 1.4 ㎜×1.4 ㎜方型電極開啟,此時 液滴將瞬間欲往方型電極移動。根據圖 4.18 可知液滴在相同位置座 標處(約在 x 座標軸為 0 處)瞬間最大初速度值約為 0.12 m/s。因多ㄧ 釋壓步驟可觀察出其初速度值明顯較無設置次電極時來的大。 4.4.3 比對次電極於不同面積下之影響 根據 AutoCAD 繪圖軟體計算已建好不同面積大小的鋸齒狀電 極,其面積分別約為 1.73 2 mm 、3.65 mm2、5.634 mm2,此時 440 n的 液滴若在 140 m流道高度拘束下,可推估呈現面積約為 3.14 mm2, 計算次電極與液滴面積比分別約為 0.5、1.1、1.8。圖 4.19 分別為不 同面積比例下鋸齒狀電極示意圖。以下將固定液滴體積與流道高度來 比對次電極在不同面積時,液滴在相同位置下瞬間所產生最大初速的 影響。表 4.3 為不同面積比例下次電極網格數與邊界條件經電場改變 範圍。 (1) 次電極面積約為 0.5 倍液滴面積 圖 4.20 為節省計算時間則取局部網格計算,並模擬開啟 0.5 倍於 液滴面積之次電極後,因內聚力減小時所呈現的液滴內部壓力。圖中 440n
的液滴將完全覆蓋鋸齒狀電極,此時液滴內壓與未施加電壓時 並無太大差別都約為 500 N/ 2 m ,根據圖 4.21 在釋壓後相同座標位置 下初速並無太大改變亦約為 0.09 m/s。 (2) 次電極面積約略等於液滴面積 前圖 4.17 中,次電極面積即為液滴面積 1.1 倍,故內聚力減小時 所呈現的液滴內部壓力與因壓差所產生初速度值即為圖 4.17、4.18。(3) 次電極面積約為 1.8 倍液滴面積 當次電極面積再放大,此時液滴內壓值因產生電濕潤現象的範圍 增加促使內聚力更為減小。圖 4.22 開啟 1.8 倍液滴面積之次電極時的 內壓不到 250 N/ 2 m ,故釋壓後因壓差所產生的液滴初速度將更勝前 兩比例。圖 4.23 液滴在相同座標位置下呈現的初速度值約為 0.16 m/s。 最後將不同面積次電極所產生的壓差隨時間變化下的關係可整 理成圖 4.24。由圖中可以發現面積越大者可產生較大的壓差,故能有 較大的出速度抵抗流道間距變小時所產生的流阻。 表 3 不同面積比例下網格數與邊界條件經電場改變範圍 次電極與液滴面積比例 0.5 1.1 1.7 邊界條件假設經電場改變 117 度~80 度 117 度~80 度 117 度~80 度 總網格數 46914 26173 28819
(a) 1mm×1mm
(b) 1.4mm×1.4mm
(c) 2mm×2mm
(a) 圓型電極尺寸半徑為 1.5 ㎜、方形電極 1 mm×1 mm (b) 圓型電極尺寸半徑為 2.0 ㎜、方形電極 1.4 mm×1.4 mm (c) 圓型電極尺寸半徑為 2.1 ㎜、方形電極 2 mm×2 mm 圖 4.2 全尺寸試片模型網格分佈 X Y Z X Y X z Z X Y X Y Y 1mm×1mm 1.4mm×1.4mm 2mm×2mm 圓型乘載電極 X Y
圖 4.3 實驗設備與架設示意圖 (e) 架設示意圖 (a) 接觸角量測儀 (d) 數位微流體晶片 (c) 單晶片控制面板 (b)顯微鏡觀測系統
(a) parylene C 接觸角變化理論曲線與實驗曲線比較圖
(b) oxide 接觸角變化理論曲線與實驗曲線比較圖
(c) nitride 接觸角變化理論曲線與實驗曲線比較圖
圖 4.6 流道高度 70m與電極大小 2×2 mm2液滴傳輸動作分解圖 t=0~0.033 秒 t=0.066~0.099 秒 t=0.132~0.165 秒 t=0.198~0.231 秒 t=0.264~0.33 秒 t=0~0.033 秒 t=0.066~0.099 秒 t=0.132~0.165 秒 t=0.198~0.231 秒 t=0.264~0.33 秒
T= 0 秒 T= 0 秒 T= 0.033 秒 T= 0.033 秒 T= 0.066 秒 T= 0.066 秒 T= 0.099 秒 T= 0.099 秒 T= 0.12 秒 T= 0.12 秒 圖4.7 流道高度70m與電極大小2×2 mm2 液滴分離動作分解圖
(a) 電極未導通 (b)液滴移至第一電極 (c)液滴移至第二電極 (d)液滴移至第三電極 (e)開始取樣(creating) (f)液滴於第 2 電極處頸 縮分離 (g) 取樣(creating)完成 (a) 電極未導通 (b)液滴移至第一電極 (c)液滴移至第二電極 (d)液滴移至第三電極 (e)開始取樣(creating) (f)液滴於第 2 電極處頸 縮分離 (g) 取樣(creating)完成 圖 4.8 流道高度 140m與電極大小 2×2 mm2液滴取樣動作分解圖
圖 4.9 液滴於流道高度 210m與電極 1×1 mm2取樣動作分解圖 1 2 3 圓型電極 (a) 原乘載液珠 (b) 抽出原液珠至第 3 電極 (c) 開始取樣機制 (d) 第 2 電極處頸縮壓力開始不足 (e) 將欲取樣之液滴被拉回 (f) 無法完成奈升液滴取樣
圖 4.10 液滴於道高度 140m與電極 1×1 mm2取樣動作分解圖 1 2 3 圓型電極 (a) 原乘載液珠 (b) 抽出原液珠至第 3 電極 (c) 開始取樣機制 (d) 第 2 電極處開始頸縮 (e) 成功分離液滴 (f) 完成奈升液滴取樣
圖.22(b) (a) 第 2 電極處頸縮壓力分佈 (b) 第 2 電極處相對位置與壓力關係 圖 4.11 液滴於流道高度 210m下頸縮區域壓力圖 x y z
(a)第 2 電極處頸縮壓力分佈 (b) 第 2 電極處相對位置與壓力關係 圖 4.12 液滴於流道高度 140 m下頸縮區域壓力圖 X y z
圖 4.13 次電極(鋸齒狀電極)網格分佈模型 次電極(鋸齒狀電極)
1.4 ㎜×1.4 ㎜方型電極 主圓型乘載電極
off on off off off on off off off on 圓型乘載電極 圖 4.14 有無次電極下的開關順序對照圖 次電極
(a) 無施加電壓下液滴內壓值分佈圖 (b) AA截線下相對位置與壓力關係 圖 4.15 無施加電壓液滴內壓值 A A x y 液滴
(a) 開啟次電極後液滴內壓值分佈圖
(b) BB截線下相對位置與壓力關係
圖 4.17 開啟次電極後液滴內壓值
B B
(a) 約 0.5 倍於液滴面積
(b) 約 1.1 倍於液滴面積
(c) 約 1.8 倍於液滴面積
(a) 開啟 0.5 倍於液滴面積之次電極後液滴內壓值分佈
(b) CC截線下相對位置與壓力關係
圖 4.20 開啟 0.5 倍次電極之液滴內壓值 C C
(a) 開啟 1.8 倍於液滴面積之次電極後液滴內壓值分佈
(b) DD截線下相對位置與壓力關係
圖 4.22 開啟 1.8 倍次電極之液滴內壓值 D D
Drop pressure (Pa) time 500 412 開啟次電極 釋壓並朝第一電極位移 產生最大初速處 (a) 0.5 倍 Drop pressure (Pa)
time 500 320 開啟次電極 釋壓並朝第一電極位移 產生最大初速處 412 (b) 1.1 倍 time Drop pressure (Pa)
500 241 開啟次電極 釋壓並朝第一電極位移 產生最大初速處 412 (c) 1.8 倍 圖 4.24 不同(0.5 倍、1.1 倍、1.8 倍)次電極面積下 液滴內壓隨時間變化關係
7
第五章 結論與展望
5.1 結論 本研究成功模擬出分離單一奈升級液珠之數位微流體技術,首先 是以接觸角理論值與實驗值的相互比較,再以液滴於三種介電薄膜表 面給予不同電壓測試接觸角變化情形,並與理論接觸角相驗證,發現 高介電材料確實能降低介電潤濕之操作電壓。本文中完成傳輸、分離 與取樣的模擬機制並與實驗對照,而模擬結果上的液滴輪廓雖與實際 現象有些許出入,但在時間與液滴位移量的關係上,仍俱一定趨勢 性。且在完成取樣(creating)機制與電濕潤理論比對後,我們可成功預 測在建立取樣(creating)機制時所需的流道高度。 而由上述的討論可得知流道間距為一重要因素,若流道間距過大 則無法出現取樣機制,若是過小則成為在取樣時因流阻過大所造成的 傳輸阻礙。故最後設計次電極,使其因有一釋壓動作而致使液滴初速 增加來抵抗流阻,其目的是為了將來若抽取更小液滴時流道必然減小 所帶來的效應。並發現在比較不同次電極面積下,1.8 倍液滴面積的 次電極釋壓後會在欲移至第一電極處有最大初速度 0.16 m/s,說明了 較大的次電極面積能產生較大的初速來抵抗流阻。 5.1 展望 本研究已將基礎EWOD的模擬機制建立,將來工作上更可加以應 用在運輸細胞及血液等傳輸機制上,或將電極建立成二維陣列等形 式,可使液滴移動上更具廣泛性,其最後目的是希望能幫助實驗前能 先給予一預測的趨勢性,以降低作實驗時所花費的成本及時間,方便 將數位微流體晶片應用於生醫檢測方面。 而現今PHILIPS公司也已將EWOD技術應用於顯示科技,藉由控 制有色油墨的電溼性來作為顯示影像的技術如:電子紙等。因而可預 見EWOD技術在未來仍具有相當的發展優勢。參考文獻
1. D. Reyes, D. Iossifidis, P. Auroux, A. Manz, “Micro totalanalysis systems.Part1.Introduction,theory,and technology”,Anal.Chem. 74 (2002) 2623–2636.
2. P.Auroux,D.Iossifidis,D.Reyes,A.Manz,“Micro totalanalysis
systems. Part 2. Analytical standard operations and applications”, Anal. Chem. 74 (2002) 2637–2652.
3. A.Tudos,G.Besselink,R.Schasfoort,“Trendsin miniaturized total
analysis systems for point-of-caretesting in clinicalchemistry”,Lab Chip 1 (2001) 83–95.
4. E.Verpoorte,“Microfluidicchipsforclinicaland forensicanalysis”, Electrophoresis 23 (2002) 677–712.
5. A. van den Berg, T. Lammerink, “Micro total analysis systems:
microfluidicaspects,integration conceptand applications”,Top.Curr. Chem. 194 (1998) 21–49.
6. A. Darion, M. Sequeira, G. Pennarun-Thomas, H. Dirac, J. Krog, P. Gravensen, J. Lichtenberg, D. Diamond, E. Verpoorte, N. de Rooij, “Chemicalsensing using an integrated microfluidicsystem based on theBerthelotreaction”,Sensorsand.ActuatorsB 76 (2001)235–243.
7. E. Verpoorte, B. van der Schoot, S. Jeanneret, A. Manz, “3-dimensional micro-flow manifolds for miniaturized chemical analysissystems”,J.Micromech.Microeng.4 (1994)246–256.
8. J. Harrison, K. Fluri, K. Seiler, Z. Fan, C. Effenhauser, A. Manz, “Micromachning a miniaturized capillary electrophoresis-based chemicalanalysissystem on chip”,Science261 (1993)895–897.
9. Lippman G, Relation Entre Les,“Phenomens electriues et capillaries”, Ann. Chim. Phys, 187; 5: 494-59.
10. Michael G. Pollacka and Richard B. Fairb, “Electrowetting-based actuation of liquid dropletsformicrofluidicapplications”,APPLIED PHYSICS LETTERS VOLUME 77, NUMBER 11.
11. Neil Fortner and Benjamin Shapiro, “Equilibrium and Dynamic
Behavior of Micro Flows Under Electrically Induced Surface Tension Actuation Forces”,AerospaceEngineering, University of Maryland
![圖 2.10 多視角液滴分離(cutting)示意圖[16]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8504726.185442/29.892.202.696.181.717/圖21多視角液滴分離cutting示意圖16.webp)