國立交通大學
交通運輸研究
所
碩士論文
高速公路動態車流動向推估模式之研究
—以國道五號為例
A Model for Estimating Dynamic Flow Movements on Freeway
- With the Case of National Freeway NO.5
研 究 生:黃士騰
指導教授:黃台生 老師
高速公路動態車流動向推估模式之研究—以國道五號為例
A Model for Estimating Dynamic Flow Movements on Freeway
- With the Case of National Freeway NO.5
研 究 生:黃士騰 Student:Shih-Teng Huang
指導教授:黃台生 Advisor:Tai-Sheng Huang
國 立 交 通 大 學
交 通 運 輸 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of Traffic and Transportation College of Management
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Traffic and Transportation
June 2009
Taipei, Taiwan, Republic of China
i
高速公路動態車流動向推估模式之研究—以國道五號為例
研究生:黃士騰
指導教授:黃台生
國立交通大學交通運輸研究所碩士班
摘要
隨著 現代 科技 的發 展 ,應 用 相關 技 術與 設 備之 智慧型運輸系統 ( IntelligentTransportation System, ITS),成為近年來交通運輸發展的重點,其中的先進交通管理
系統(Advanced Traffic Management System, ATMS)更是 ITS 的核心。ATMS 旨在藉 由目前的交通資料,預測未來之交通狀況,並執行相對應之交通控制與管理措施。因 此,若能掌握目前道路上車輛所欲前往之目的地,則更能夠正確預測未來之交通狀況, 及早研擬策略,以減少交通問題。
鑑於上述背景,本研究以高速公路為目標,推估目前在高速公路主線上之車流,
所可能離開之出口匝道,稱之為「動態車流動向」,構建動態車流動向推估模式。此推
估模式以 Lin and Chang(2007)之高速公路動態起迄研究為基礎,進一步延伸並將動 態起迄轉換為動態車流動向。修改 Lin and Chang 模式中各車輛旅行時間服從某種分配 型態之假設,改以偵測器之車速資料轉換為旅行時間;並且修改主線流率關係式與部 分卡門濾波器求解流程。 本研究模式以國道五號雪山隧道北口至蘇澳端之資料作為實例運算,以主線流率 比較運算之結果。驗證結果顯示,於運算結果中,各時階之 MAPE 皆不大於 26%,大 多數時階 MAPE 小於 15%,表示推估結果多為「精確」或「良好」等級,可供未來 ATMS 作為運用。 關鍵字:動態車流動向、動態起迄、國道五號、卡門濾波器
ii
A Model for Estimating Dynamic Flow Movements on Freeway
- With the Case of National Freeway NO.5
Student: Shih-Teng Huang
Advisor: Tai-Sheng Huang
Institute of Traffic and Transportation
National Chiao Tung University
ABSTRACT
As development of modern technology, Intelligent Transportation System (ITS) applied related techniques and facilities, become key point of recent progress of traffic. Especially, Advanced Traffic Management System (ATMS) is the core of ITS. ATMS aims to forecast future traffic by utilizing present traffic data, and implements corresponding traffic control and management methods. Therefore, if controllers know where the vehicles on the road are heading, they can forecast future traffic more accurate and make strategies to reduce traffic problems.
Due to above-mentioned background, this study focuses on freeway and estimates
“dynamic flow movements”, which means “which off-ramp that vehicles on freeway are
heading to exit”, and constructs model to estimate it. This estimation model is extended by Lin and Chang’s model (Lin and Chang, 2007) which estimates dynamic freeway origin-destination. The dynamic flow movements estimation model transforms dynamic origin-destination into dynamic flow movements. Lin and Chang’s model assumes that travel time discrepancy among vehicles follows a certain distribution; this study modifies the assumption by transforming speed data into travel time discrepancy. This study also modifies mainline flow equations and parts of Kalman Filter process.
iii
to validate the estimating results. Validation shows that estimation results MAPEs of each time-step are less than 26%, most MAPEs are less than 15%. It means most of the estimation results are “Highly Accurate” or “Good Forecast”, and this model is able to be applied to ATMS.
Keywords: Dynamic Flow Movements, Dynamic Origin-Destination (Dynamic O-D), National Freeway NO.5, Kalman Filter
iv
誌謝
終於,終於完成了。 一直以來始終順遂的求學之路,卻在最後關頭跌了一跤。多當了一年的學生,這 期間看到大家在畢業後朝著人生的目標邁進,心中是說不出的羨慕,如今我也終於能 加入各位的行列。 論文能夠完成,首要必頇向恩師黃台生老師致十二萬分的謝意。在撰寫論文期間, 每次前往請教老師問題,不論老師當時是在休息或是正在處理事情,總是中斷手邊的 工作耐心地給予指導,並以嚴謹的治學態度,指點出其中的錯誤與方向,讓論文一步 一步成型直到完成。除了學業上,老師也教育我對於待人處世的態度,這些教誨我都 點滴在心頭。在此對老師再次致上無盡的感謝。 研究所修課期間,從諸位老師的課程中學習到了許多知識。論文研究時,透過交 通部運研所的大力協助,取得國道五號資料。口詴期間,承蒙交通部運研所蘇振維博 士以及逢甲大學林良泰教授的細心指正,並給予寶貴的意見。學生由衷感謝。 來到台北唸研究所,很高興認識了各位同學。能與你們一起討論課業、聊天、吃 火鍋、尾牙、班遊等等,同享在一起的歡樂時光;延畢的這一年,你們給我鼓勵與支 持,感謝班上每一位同學給我的一切幫助與回憶。特別感謝七年的摯友謝育和肥貍, 我會永遠記得我們一同出遊的足跡,以及你們給我的幫助。也感謝大學的朋友們,每 次和你們吃飯聊天,都是我最快樂最開心的時刻,讓我忘卻了論文的壓力。 最後感謝我的家人,感謝你們從小到大對我的照顧、關懷、教誨,我都感激在心 裡;也謝謝你們在背後給予我的支持,讓我能專心完成學業。 謝謝每一位曾給我鼓勵與幫忙過我的人,謝謝。 士騰 謹誌 2009.7.6v
目錄
中文摘要 ... i 英文摘要 ... ii 誌謝 ... iv 目錄 ... v 表目錄 ... viii 圖目錄 ... ix 第一章 緒論 ... 1 1.1 研究背景與動機 ... 1 1.2 研究目的與課題 ... 2 1.3 研究範圍 ... 3 1.4 研究架構 ... 3 1.5 研究方法 ... 5 第二章 文獻回顧與評析 ... 7 2.1 傳統交通管理與靜態旅次起迄 ... 7 2.1.1 靜態旅次起迄與運輸規劃 ... 7 2.1.2 傳統高速公路交通控制系統 ... 11 2.2 先進交通管理 ... 12 2.2.1 都市交通控制策略 ... 13 2.2.2 高速公路先進交通管理 ... 17 2.3 靜態車輛旅次起迄調查與推估方法之回顧 ... 20 2.3.1 靜態車輛旅次起迄調查方法 ... 20 2.3.2 靜態車輛旅次起迄推估方法 ... 22 2.4 動態車輛旅次起迄推估方法之回顧 ... 23 2.4.1 高速公路動態車輛旅次起迄推估方法之演進 ... 25vi 2.4.2 動態車輛旅次起迄推估方法之演算法 ... 34 2.5 小結 ... 41 第三章 動態交通管理與動態車流動向 ... 43 3.1 動態交通管理之基本運作 ... 43 3.1.1 靜態交通管理之意義與內容 ... 43 3.1.2 動態交通管理之意義與內容 ... 44 3.2 動態起迄資料之延伸 ... 47 3.3 動態車流動向之意義與作用 ... 48 第四章 動態車流動向推估模式之建立 ... 52 4.1 交通資料型態 ... 52 4.2 動態車流動向推估模式構建 ... 53
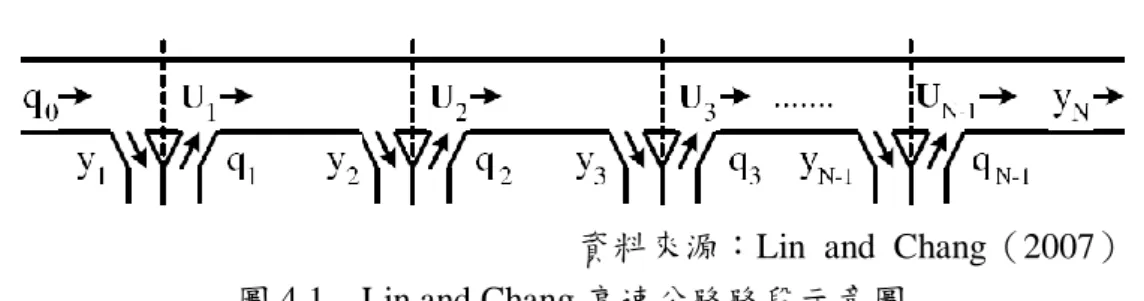
4.2.1 Lin and Chang 動態起迄推估模式 ... 54
4.2.2 動態車流動向推估模式 ... 58 4.3 動態車流動向推估模式運算方法 ... 60 第五章 模式實例運算 ... 65 5.1 國道五號基本資料 ... 65 5.1.1 交流道 ... 66 5.1.2 隧道 ... 67 5.1.3 車輛偵測器 ... 68 5.1.4 速限 ... 68 5.2 模式輸入資料 ... 68 5.3 模式執行與推估結果 ... 72 5.3.1 動態起迄推估結果 ... 73 5.3.2 動態車流動向推估結果 ... 74 5.4 模式驗證 ... 77 5.4.1 評估準則 ... 77
vii 5.4.2 評估結果 ... 78 第六章 結論與建議 ... 80 6.1 結論 ... 80 6.2 建議 ... 81 參考文獻 ... 82 附錄一 國道五號偵測器位置表 ... 88 附錄二 動態起迄與動態車流動向推估結果 ... 90
viii
表目錄
表 2.1 各類型交通號誌控制策略與模式比較表 ... 15 表 2.2 靜態車輛旅次起迄調查方法優缺點比較表 ... 22 表 4.1 範例路網可能起迄旅次量... 61 表 5.1 國道五號交流道資料 ... 67 表 5.2 國道五號隧道資料 ... 68 表 5.3 國道五號偵測器資料格式... 69 表 5.4 模式測詴選用之偵測器 ... 70 表 5.5 17 處偵測器四小時累積流量 ... 71 表 5.6 動態起迄推估結果 ... 73 表 5.7 MAPE 評估標準 ... 78 表 5.8 評估結果 ... 78ix
圖目錄
圖 1.1 研究架構圖 ... 4 圖 2.1 都市交通控制系統基本功能 ... 13 圖 2.2 高速公路即時系統控制策略 ... 18 圖 3.1 高速公路路段範例 ... 49圖 4.1 Lin and Chang 高速公路路段示意圖 ... 54
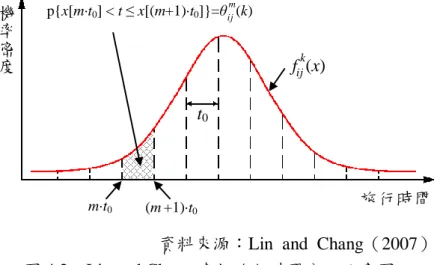
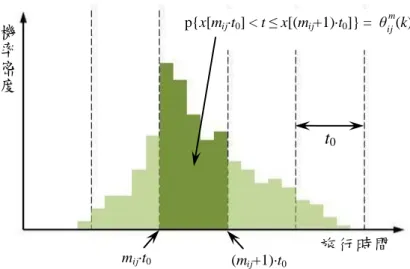
圖 4.2 Lin and Chang 車輛旅行時間分配示意圖 ... 57
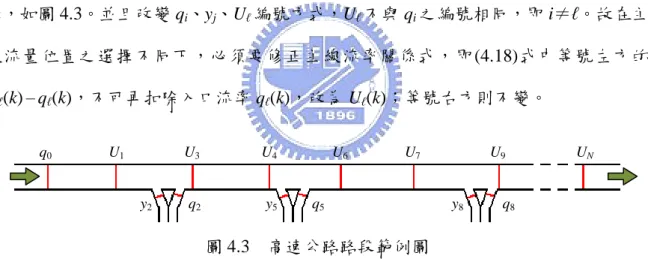
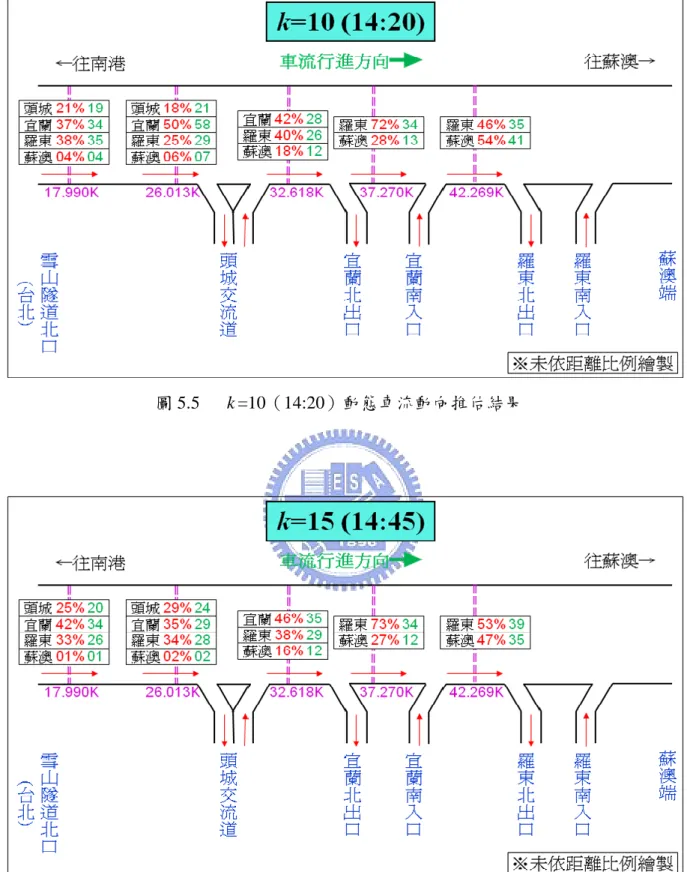
圖 4.3 高速公路路段範例圖 ... 58 圖 4.4 各車輛速率換算旅行時間差異範例 ... 59 圖 4.5 範例路網與各路段流率 ... 61 圖 5.1 國道五號路線圖 ... 66 圖 5.2 模式測詴選用之偵測器位置示意圖 ... 70 圖 5.3 偵測器累積流量圖 ... 71 圖 5.4 模式運算畫面 ... 73 圖 5.5 k=10(14:20)動態車流動向推估結果 ... 75 圖 5.6 k=15(14:45)動態車流動向推估結果 ... 75 圖 5.7 k=23(15:25)動態車流動向推估結果 ... 76
1
第一章 緒論
1.1 研究背景與動機
旅次起迄(Origin-Destination, O-D)資料可以表現該地區之旅次型態、需求產生 點、需求吸引點、旅次長度等情形。對於運輸規劃、交通工程、路網設計、運輸管理 等方面而言,都是相當重要的基本資料。 傳統上取得起迄資料的方式,都是採用調查的方法,如路邊訪問調查法、車輛牌 照登錄法、明信片調查法、電話訪問法、亮燈調查法、標籤調查法等等。但依上述方 法所取得的資料時間維度較長,短則數小時,長則數日,屬於長期性之靜態起迄資料, 因此僅適合運輸規劃等長期層面之用。 然而近年來為了改善現有交通問題,使有限的運輸資源作最有效的利用,因此全 世界皆大力發展智慧型運輸系統(Intelligent Transportation System, ITS)。而其中的先進交通管理系統(Advanced Traffic Management System, ATMS),即是著重於交通管理
人員能夠藉由即時的交通路況資料,取得動態旅次起迄,並預測短時間內之交通狀態, 進而研擬控制策略,並以先進旅行者資訊系統(Advanced Traveler Information System, ATIS)中的資訊可變標誌(Changeable/Variable Message Sign, CMS/VMS)或公路路況 廣播(Highway Advisory Radio, HAR)等方式告知用路人相關資訊,以改善交通狀況。
但要達到上述目標,必頇要有許多技術結合方能達成,而動態旅次起迄資料即是 其中相當重要的一環。傳統調查法僅能取得靜態之資料,該資料已無法迎合智慧型運 輸系統之需求。且旅次起迄情形本為動態,會隨著不同日期(如帄日、假日)、不同時 段(如尖峰、離峰、白天、深夜)而有所差異,但傳統調查法無法完整顯現此種差異 性。故在上述情形下,近三十年來陸續有許多學者投入動態旅次推估方法之研究;由 於路段流量的資料取得容易,且路段流量與旅次起迄量有一定的關係存在,故模式大 多以路段流量進行推估,並參考起迄歷史資料作為基礎。
2 另一方面,交通管理也隨著科技與技術的進步而邁向動態交通管理。動態交通管 理係利用攝影機、偵測器等設備對道路車流進行即時之監控與資料蒐集,並進行分析 以研擬管制策略,再將管制策略應用於資訊可變標誌、號誌等設施之上。由於動態交 通管理是針對目前以及一段時間後的交通狀況為處理的目標,因此對於目前已經在道 路上的車流,希望能夠掌握其迄點;而車流的起點由於是過去所發生的事情,對於動 態交通管理而言意義較小。故重點應掌握車輛所要前往的地方,以便於動態交通管理 之用。 在現實路網下,其起迄情形與路徑選擇相當複雜,單純以模式難以完整反映出現 實狀況,故目前動態起迄推估之研究,大多將研究重點放在高速公路或簡化之一般路 網上。高速公路屬於封閉道路,道路特性單純,進出口少,且無路徑選擇之問題,故 較適合進行動態旅次之推估。因此本研究延續先前之相關研究,針對高速公路進行動 態車流動向推估,以期對於未來實務上有所助益。
1.2 研究目的與課題
鑑於前述研究動機,本研究旨在構建出一可靠之高速公路動態車流動向推估模 式,在已知高速公路路段及各時階上下匝道之流率下,配合現有之動態旅次起迄推估 模式,藉此推估得到旅次起迄矩陣與車流動向,以作為動態交通管理等相關業務之運 用。本研究主要研究目的列舉如下: 一、 蒐集整理與回顧交通管理與旅次起迄推估之相關文獻。 二、 了解動態起迄推估模式之推估方法與流程,作為動態車流動向推估模式之基 礎。 三、 對現有之動態起迄推估模式進行改良修正,構建動態車流動向推估模式。 四、 以國道五號之偵測器資料輸入模式進行運算,以求得國道五號之動態旅次起 迄與動態車流動向,並藉此進行驗證。3
1.3 研究範圍
至目前為止,以一般路網作為路段流率推估動態起迄之研究,大多仍以模擬之虛 擬路網為主,因為現實情況之真實路網過於複雜,又牽涉到路徑選擇之問題而難以進 行起迄之推估。而高速公路為封閉道路,各起點與迄點明確,起迄型態與車流行為較 一般路網單純,且進出口(匝道)之流率資料容易取得,故本研究針對高速公路進行 旅次起迄推估模式之研究。 本研究以現有之高速公路動態起迄推估模式為基礎,延續其模式架構,進行修正 與改良,並應用於國道五號目前已完工通車之南港至蘇澳路段上。以國道五號該路段 偵測器資料進行動態車流動向推估,以求得國道五號之車流動向。 國道五號之資料由民國 95 年 10 月起至民國 96 年 9 月止,包含國道五號主線以及 進出口匝道所有偵測器之資料,本研究將自其中篩選出部分資料進行實例運算。1.4 研究架構
本研究架構概述如下:首先確立研究目的、範圍等,接著蒐集動態旅次起迄推估 與動態交通管理之文獻,了解動態交通管理之意涵,再整理比較各種推估之模式,彙 整出目前研究之進展與方向,由其中選擇較符合本研究之推估模式,針對其缺失或不 足之部分加以修改補正,建構動態車流動向推估模式。再將國道五號流率資料,篩選 出合適之資料,輸入模式作為實例運算求得推估結果。接著進行分析,以評估模式之 優劣。最後依照研究與分析之情形,得到研究結論與建議。 本研究架構如圖 1.1 所示。4 動態起迄推估、動態交通管理 動態車流動向模式構建 國道五號資料 資料篩選 動態車流動向模式實例運算 了解動態起迄推估模式之流程與意義 結論與建議 動態車流動向模式驗證 文獻回顧 資料蒐集 確立研究目的 圖 1.1 研究架構圖 各項目說明如下: 一、確立研究目的 確認本研究之研究目的、研究範圍、研究方法等,以確立本研究之整體方向 與架構。 二、文獻回顧 回顧交通管理與動態起迄推估相關之文獻,從中了解目前交通管理之作法與 各種推估方法之發展現況,以作為本研究之參考。
5 三、了解動態起迄推估模式之流程與意義 由參考文獻中所得到現有之動態起迄推估模式,並了解各推估模式之運作方 法,模式中的流程與意義,並從中選出合適的模式作為本研究之基礎。 四、動態車流動向模式構建 由所選出較為適合本研究的模式作為基礎,再針對其中之缺點或可改進處進 一步加以修正,構建出動態車流動向推估模式,提高模式之正確性與實用性。 五、資料蒐集 透過交通部運輸研究所之協助,取得國道五號之偵測器資料,作為模式之輸 入資料。 六、資料篩選 由於偵測器資料可能存有誤差、資料漏失等問題,因此必頇篩選出正確性較 高之資料,降低推估結果之誤差。 七、動態車流動向模式實例運算 將國道五號之路段及匝道流率資料,從中篩選部分資料作為模式之輸入資 料,進行動態起迄推估運算,求解國道五號之動態起迄與動態車流動向。 八、動態車流動向模式驗證 將國道五號之推估情形進行分析,以驗證推估結果正確性,檢視模式表現之 優劣。 九、結論與建議 根據本研究中所遭遇之問題與研究結果,整理出一具體的研究結論與未來研 究建議,以作為實務應用或未來研究之參考。
1.5 研究方法
本研究所使用之研究方法,分別介紹如下: 一、文獻評析法 整理國內外有關交通管理與旅次起迄推估之相關文獻,包括以高速公路為研6 究目標之方法、一般路網之推估研究、台灣地區之研究等,綜合整理其研究 之情形,作為本研究之基礎,再依循其脈絡延伸修改而得到本研究之模式與 方法。 二、卡門濾波器 卡門濾波器(Kalman Filter)是利用系統狀態方程式與量測方程式所組成, 主要的特點是利用前一個時階的預估值與目前時階所觀察得到的量測值,對 於目前系統的狀態進行最佳預估,進而得到系統狀態之最小誤差預估值的演 算法。卡門濾波法因很適合動態系統,故已被廣泛的應用在各項領域上。本 研究將以高速公路主線及匝道之流率,應用卡門濾波器進行動態車流動向之 推估。 三、統計分析法 本研究在求出起迄之推估結果後,需再對結果進行分析,以驗證模式推估結 果之正確性。正確性分析需比較模擬之結果與實際值之差異,計算均方根誤 差(RMSE)與帄均絕對值誤差率(MAPE),視此兩項準則之大小以評估模 式之優劣。
7
第二章 文獻回顧與評析
傳統之交通管理在執行上,所運用之資料多為靜態之資料,其中一項就是靜態旅 次起迄資料,因此本章 2.1 節探討傳統交通管理與靜態旅次起迄間的關係。往後隨著 技術的進步,交通管理亦逐步邁入先進交通管理,在 2.2 節探討先進交通管理與交通 控制於一般路網與高速公路上之應用。針對車輛起迄資料的取得方法,在 2.3 節介紹 靜態車輛起迄之調查與推估之方法。2.4 節為動態車輛起迄推估方法之回顧。最後 2.5 節針對本章所回顧之文獻等進行小結。2.1 傳統交通管理與靜態旅次起迄
2.1.1 靜態旅次起迄與運輸規劃 交通壅塞情形的產生,與空間上之區位分佈有關。以早上尖峰為例,由於旅次需 求大多為進城方向,而郊區由於距離市區較遠,因此必頇較早出發,故此時郊區之車 流量較大;在經過一段時間之後,這些車輛移動到市區邊緣,與此地進城之車流會合, 造成市區邊緣地區的擁擠情形;最後接近上班時間時,大多數的車流皆集中於旅次吸 引之市中心區,將擁擠情形帶入市區。當上班時間過後,此時需求量減少,交通擁擠 的情形也會逐漸消失。 綜上所述,由於旅次起迄的不同與變化,其結果就會表現於交通狀況上,使得道 路壅塞的位置會發生在不同時間與不同地點。故若能夠了解旅次起迄,對於道路交通 狀況的掌握以及交通管理策略的採行將會有極大的助益。 起迄資料可用以決定旅次的方向、行駛路線和旅次長度等。而旅次的端點也會影 響旅次方式的選擇,因此起迄資料對於運輸規劃、設計和行車路線與場站的管制作業 中,都具有非常重要的地位。在運輸規劃中,便有探討旅次起迄的意義與取得方法。 陳鴻慶(2001)整理運輸規劃之意義。運輸規劃是指以一種連續性的規劃程序, 從對於某一新環境的認識開始,進而發覺新問題或者預測將來會發生的問題,再運用8
交通的 3E 政策(Engineering 工程、Education 教育、Enforcement 執法)之方法進行分 析改善,以達到能符合未來運輸的需求或是改善現有問題的目標的系統性方法。 運輸規劃可分為供給層面與需求層面兩方面。運輸需求是基於個人從事日常生活 各種活動之需要而產生,而運輸規劃的目標是預測未來之規劃區域的總需求,因此其 需求分析可由規劃區域交通分區的總體需求著手,或者由個體需求加以分析,再彙總 成總交通分區之總體需求。基於上述原因,運輸需求分析主要可分為總體程序性規劃 法、總體直接性規劃法以及個體規劃法等,以下簡單介紹總體程序性規劃法。 張庭銀(2006)整理總體程序性規劃法。本法係以交通分區為分析之基礎,並將 所規劃之地區劃分為幾個交通分區,由交通分區中土地及社經特性計算出旅次發生 量,並由分區間吸引與旅次目的特性計算出旅次分佈,再依據旅運者之旅運行為選擇 所使用運具之運具分配,最後再依據系統最佳化、使用者均衡等原則選擇路線並將旅 次指派至路網中以完成規劃預測工作。總體程序性規劃法之四個階段為旅次發生、旅 次分佈、運具分配、路網指派。 一、旅次發生(Trip Generation) 旅次發生為傳統運輸規劃之第一個階段,依據某交通分區之土地使用、區位及社 會經濟等特性,估計離開或進入該分區之總旅次數;而離開該分區之總旅次數即為旅 次產生(Trip Production),進入該分區之總旅次數則為旅次吸引(Trip Attraction)。 二、旅次分佈(Trip Distribution) 旅次分佈為總體程序性運輸規劃之第二步驟,主要在分析交通分區間流動之旅次 數,並考量各交通分區之旅次產生量以及未來運輸設施資料與影響,當旅次分佈程序 在旅次發生之後,即可獲得所有運具之流動旅次數,進而建立一個模式作為預測及規 劃之依據。 三、運具分配(Modal Split) 一般運輸規劃是將運具分成大眾運具和私人運具。旅運者對運具的選擇通常是基
9 於社經特性與價值觀而有所不同,運具分配主要的工作係從總旅次數中推估各種運具 的旅次數。 四、交通指派(Traffic Assignment) 交通量指派又稱路網指派(Network Assignment),為程序性需求分析之最後階段, 可分為公路交通量指派與大眾運輸交通量指派兩種。依據成本最低或時間最短之原 則,將旅次分佈之交通分區間旅次量依照旅運者運具分配比率指派到路網上,以得到 路段上之交通量。 在第二步驟的旅次分佈,主要就在探討起迄的問題。王文麟(1998)認為起迄研 究狹義地說是在研究某特定區域內旅客和貨物運行移動的形態,以便獲得旅次起迄 點、發生時間和旅次所使用的運具等資料。但若更進而計及旅次的目的、旅次起迄點 的土地使用情形及其社經資料等等研究,則將變得更為複雜,而成為廣義的起迄點調 查。 交通起迄調查的主要目的,為獲得有關行旅需求的實際資料,從而提供資料,以 作為有效的客貨運運輸計劃。由起迄點資料可以決定: 一、在現有或未來運輸設施的旅次需求。 二、現有停車設施或其他場站設施是否適當足夠。 三、現有大眾運輸設施是否適當足夠。 四、新橋和場站設施的最理想設置位置之決定—橋樑定位和場站區位。 五、設立迂迴或捷徑道路的可行性研究。 六、對新建或改善街道系統、快速道路系統和高速公路系統的規劃、定線和設計 所需的基本資料。 七、對新設或改善大眾運輸系統的規劃、定線和設計所需的資料。 八、為規劃和設計借道或過境交通路線和貨車行駛路線提供所需的資料。 九、對可能使用擬議中新建或改善路段、客運路線和場站等作用量估計。 十、各種不同型式土地使用的旅次特性。
10 十一、預測未來運輸設施的行旅型態和必要條件的主要方法。 十二、各種改善計劃的施工優先次序和最經濟的改善方法等。 上述種種主要偏向於配合未來長期的的運輸需求,但交通管理所需要的是現況以 及數分鐘至數小時內的未來情況,因此在交通管理的操作與設計上,靜態的(如以日 為單位)交通資料並不夠詳細,而需要更細的單位(如小時交通量)資料作為輔助。 為表現不同時段(如尖離峰)下的交通變化情形,在交通工程上會以尖峰小時流量 (Peak-hour Volume)來表示。尖峰小時流量係指一天當中交通量最高之該一個小時流 量,且會依不同車流方向分別考慮。尖峰小時流量通常作為公路設計與交通管理操作 規劃之依據。在設計上,尖峰小時流量有時可由日流量來推估獲得。其推估式如下: DDHV = AADT × K × D (2.1) 其中:
DDHV:方向設計小時流量(Directional Design Hour Volume)。
AADT:年帄均日交通量(Average Annual Daily Traffic)。
K:尖峰小時流量佔日交通量的比例,為小於 1 的數字,稱為 K 因素(K Factor)。 D:尖峰小時內,尖峰方向的流量佔尖峰小時總流量的比值,稱為 D 因素(D Factor)。 交通需求可能隨時間做短暫的變化,這種短暫之交通車流變化,可能導致道路因 容量不足而形成瓶頸,因此交通工程設施的設計在某些情況下有必要對尖峰小時內的 車 流 變 化 做更 仔細 的觀 察, 即次 小時流 量( Subhourly Volume )。尖峰小時因素 (Peak-Hour Factor, PHF)之目的便在顯示尖峰小時流量內的尖峰性。 PHF = 尖峰小時流量(Hourly Volume)
最大流率(Maximum Rate of Flow) (2.2)
以尖峰小時內的最大 15 分鐘流率為例:
PHF = V
11 其中: V:小時流量(vph)。 V15:尖峰小時內最大的 15 分鐘流率。 2.1.2 傳統高速公路交通控制系統 高速公路交通控制之目標包括(FHWA,1976;蔡輝昇,1990): 一、減少重現性壅塞。 二、使非重現性壅塞的影響減到最小,當發現車流行進出現異常,應立即採取必 要措施以防繼續惡化。 三、使營運的安全性最大化,當道路、交通或天候不良時,能預先警告駕駛人, 以防意外事故的發生。 四、提供用路人必要的資訊,以提昇使用交通設施的效率,並降低其身心上的壓 力。 五、當駕駛人發生狀況時(如車禍、故障等)給予其協助。 高速公路之交通壅塞,可分為重現性交通壅塞及非重現性交通壅塞。重現性交通 壅塞,通常指在高速公路某一路段或匝道,因其交通量超過道路本身的容量,導致飽 和而發生壅塞。此種現象經常發生於特定的地點或時間,如上下午尖峰時間或瓶頸路 段。由於此種擁擠狀況經常發生且可能重複出現,故稱為重現性之交通壅塞。如國道 五號雪山隧道路段每逢放假日上午,常因台北往宜蘭地區旅遊之車潮眾多,造成南下 方向的壅塞;而收假日的下午至夜晚亦因車潮返回台北而使得北上方向發生壅塞。此 即因交通流量超過其實際容量,而發生之重現性交通壅塞。 非重現性交通壅塞,發生之原因係來自高速公路行車之隨機性因素,意即產生壅 塞的原因、時間、地點無法事先確定,例如交通事故、車輛故障、掉落物品或駕駛人 操作不當等。欲紓解非重現性之交通壅塞,必頇在事先有充分預防措施,以應付突發 性事件。然而交通事件發生因素相當複雜,甚至無法避免。因此,彌補之道在於事件
12 發生後,能迅速發現,並即時採取有效處理措施,使事件所產生之衝擊減至最低。 由上述形成高速公路壅塞的原因,可以看出唯有實施適當的交通管制策略,才能 有效改善重現性或非重現性之交通壅塞現象。高速公路交通管理的策略上,早期的管 理方式包括定時匝道儀控、高乘載管制等,並未考量車流的即時狀況;近年來則運用 智慧型運輸系統下的先進交通管理系統,以達到運輸效率最大化及運輸安全之目的。 (蔡輝昇,1990)
2.2 先進交通管理
先進交通管理系統為車輛、道路與旅行者間資訊溝通之中心,負責交通狀況之預 測研判,交通管理策略分析、評估與執行,以達到運輸效率最佳化與運輸安全之目的; 先進旅行者資訊系統係為提供各種即時資訊以輔助旅行者到達其目的地之系統,該系 統需藉先進交通管理系統所提供之即時資訊以發揮其功能,這些資訊包括事件情形、 天候、道路狀況、最佳路徑、行前規劃、大眾運輸資訊及停車場狀況等資料,所以一 個有效之先進交通管理系統之建立,應能滿足先進旅行者資訊系統之需求。 交通控制及管理系統的建立,主要希望可以徹底去除路網原有交通運作瓶頸問 題,發揮運輸設施建設功能,使現有車道容量達到最佳的利用。並利用自動化設施監 視及運作管理作業,以增強整體運輸系統的使用效率。(張景帄等,1994) 為解決交通擁擠的問題,在不新建道路的情況下,則需思考如何使現有交通設施 發揮最大效用,以充分利用其容量,此即交通控制所欲解決的問題。蔡輝昇(1990) 將交通控制分為都市交通控制與高速公路交通控制兩種。都市交通控制系統主要功能 在於控制與監督交通號誌的運作,可以分為按照預定時間表控制的靜態系統,或依據 交通變化情形,適時變換號誌顯示情形的動態系統兩種方式。其基本功能如圖 2.1 所 示。由資料蒐集、決策、執行、查驗、評估,再回到資料蒐集,形成一個封閉的環路。 高速公路交通控制系統,主要是管制車流進入高速公路及順暢地離開高速公路,以維 持高速公路適當的服務水準,其管制方式有上匝道控制、下匝道控制等。此外,為維13 持行車安全,也會有所謂的意外事件偵測、可變資訊顯示等。 資料來源:蔡輝昇(1990) 圖 2.1 都市交通控制系統基本功能 2.2.1 都市交通控制策略 都市交通控制之目標,有以下五點(FHWA,1976): 一、效率最大化—包括使延滯最小、容量最大、停等時間最小等,與道路上人車 的行進有關。 二、在交通營運上之安全最大化。 三、交控系統之可靠度必頇最大化。 四、提供用路人必要的資訊,以提昇使用交通設施的效率,並降低其身心上的壓 力。 五、交控設施的維護成本最小。 都市交通控制技術之發展,可分為以下系統(何志宏,1989;蔡輝昇,1990;林 豐福等,2004): 一、固定時制 都市交通控制系統,早期皆為離線控制之定時式控制法,又稱為第一代系統。其 運作方式主要是事先經由大量人力調查,取得現地之車流量、轉向比等交通資料,再 1. 流 量 2. 佔 有 率 3. 車 速 資料蒐集 1. 時 制 運 算 2. 時 制 選 擇 3. 時 制 評 估 決 策 時 制 執 行 故 障 偵 測 執 行 1. 號誌運作 2. 時制效用 查 驗 1. 延 滯 時 間 2. 停 等 次 數 3. 等候線長度 4. 佔有率高低 評 估
14 將資料輸入號誌時制設計軟體中執行,以求出適當之號誌時制,最後再將此時制計劃 輸入系統內,依據既定的時制轉換時間表來變動號誌時制計劃。在固定時間到達時, 命令各路口控制器加以執行。 固定時制式控制系統為最基礎之系統,但由於最為簡單,故使用上亦最為廣泛。 由於此系統無法隨著路口實際車流狀況的變化,即時變換適當之時制計劃,因此此種 控制策略較適合每日各時段之交通流量十分穩定,或經常處於飽和狀況之道路群組來 實施。 二、動態查表 由於固定時制法無法配合道路上之即時狀況進行改變,當道路上之車流狀況與預 設情形出現較大差異時,則控制上便會產生運作效率低落的問題。因此本方法乃是針 對定時式系統加以進一步發展,又稱為第一‧五代系統。其控制方式係藉由車輛偵測 器蒐集一定時段之交通資料後,將資料傳回控制中心。在控制中心內經由資料彙整及 確認等程序,依相關準則之判定,至原先建立好之時制計劃資料庫中,尋找最為接近 之時制計劃,再由控制中心將所查出之時制計劃送至路口控制器去執行。此模式除可 運作於設有控制中心之交控系統外,在控制群組配置有車輛偵測器的前提下,對於僅 設置區域控制器之幹道與網路系統或獨立路口均可適用。 動態查表系統,交控中心對於替選時制計劃之計算與執行具有決策的能力。其時 制計劃的執行,可採用績效指標及時空圖作為時制計劃適用性判斷之基礎。當決定替 選時制計劃可行時,則可將新時制計劃存入資料庫中,以備未來之用。 三、動態計算 動態計算系統保持第一代系統許多軟體及硬體之特性,並加入一些額外功能,又 稱為第二代系統。其資料蒐集過程與動態查表法相同,皆藉由控制群組所轄之車輛偵 測器去蒐集一定時段之交通資料,然後將資料傳回控制中心,在控制中心經由流率空 間與時間預測之程序,對未來之車流狀況進行預測,得到預測之交通資料後,使用分
15 析程式以線上即時作業的方式,運算求得新的時制,再將新時制計劃傳送至路口控制 器執行。 動態計算系統可以採用臨界路口控制的方式,除了調整每週期之時比外,並且可 以調整時差。另外可隨時將某一網路分成不同群組,針對各群組,依據交通狀況分別 計算其最佳時制,通常能達到良好之車輛續進效果。 此系統在世界各大都市施行後,成果並不顯著,甚至較固定時制式之績效更差, 分析後其缺點主要有二。第一為流率預測準確性低。由於動態計算策略必頇預測未來 一段時間之交通流率,然而實際交通量變化狀況複雜,在無法正確預估的情況下,所 提出的時制計劃自然也就不符合實際所需。第二點則是異常時制計劃的影響。當道路 上出現如車禍等突發事件導致交通狀況異常,或是偵測器故障時,此時所得到的資料 將會產生異常的時制計劃,反而對交通造成干擾,且此負面影響將持續至突發狀況結 束一段時間後,才能逐漸消除。 四、全動態控制 全動態控制系統又稱為適應性控制系統或第三代系統。其構想乃藉由快速地調整 號誌時刻,以充分適應動態的交通狀況變化。並改進上述動態查表與動態計算系統之 流率預測準確性低與異常時制計劃影響的缺失,進而提高交控系統之運作績效。因此 全動態控制系統採用完全線上即時作業的方式,時制計劃可在三到五分鐘內產生,其 紅燈及綠燈時間會隨車隊車輛到達數目不同而改變,因此各項時制計劃參數可能均不 相同。缺點為由於要考量之因素較多,故必頇大量裝設偵測器以廣泛蒐集路網上的資 料,使得系統建置成本較高;且為了達到良好之結果,系統輸入資料增加也造成運算 過程較為複雜。 表 2.1 各類型交通號誌控制策略與模式比較表 比較項目 固定時制 動態查表 動態計算 全動態 (1)偵測器蒐集交通 資訊 無 以五分鐘為單位,若 干 時 間 掃 瞄 蒐 集 一 同左 以 週 期 或 事 前 資 訊長度為單位,每
16 比較項目 固定時制 動態查表 動態計算 全動態 次 隔 若 干 時 間 掃 瞄 蒐集一次 (2)流量預測 無 預測未來 10~15 分鐘 同左 預 測 未 來 幾 秒 或 不予預測 (3)時制參數之選擇 配適 無 線 上 選 擇 時 比 、 週 期、時差 線上計算 視 運 算 邏 輯 及 控 制方式而定 (4)交控軟體之執行 離線求出 線上即時運作 同左 同左 (5)決策邏輯之運算 定時運作 動態查表法 動態計算法 適應性決策邏輯 (6)時制更迭期間 數小時(固 定時數) 10~15 分鐘 10~15 分鐘 一時階或一週期 (7)臨界路口控制 無 有 有 不需要 (8)系統降級之應變 措施 閃黃、閃紅 固定時制 固定時制 動態、固定 (9)資料庫之儲存 固定時制計 劃 交通參數值、時制計 劃 同左 同左 (10)路口控制器或控 制中心儲存之固 定參數檔 無 轉向比、飽和流率、 流量預測參數值等 同左 同左 (11)查詢系統 有 有 有 有 (12)特殊事故之處理 可予顯示 稍有彈性 有彈性 最有彈性 (13)意外事故之偵測 無 可加入 可加入 可加入 優點 1.成本較低 2.容易設置 3.維修方便 1.因應交通狀況之變 化調整時制,較具 彈性 2.可以偵測器蒐集動 態交通資料 3.成本較低,設置便 利 1. 同 左 前 兩 點 2. 時 制 計 劃 之 產 生 較 為準確 1.可因應交通狀況 之即時變化,所 產生之時制計劃 最具彈性 2.可避免動態交控 系統之缺失 3.可以偵測器蒐集 即時性交通資訊 缺點 1. 無法因應 短時間交 通狀況之 變化,給 予適宜之 時制,以 致影響運 作績效 1.無法因應交通狀況 之即時變化 2. 流 量 預 測 存 有 誤 差,致影響時制設 計正確性 3.無法更快速因應特 殊事故加以處理 4.時制轉換期間影響 1. 同 左 前 四 點 2. 交 控 軟 體 之 發 展 不 易 3. 設 置 成 本 較高 4. 產 生 時 制 1.設置成本較高, 所需埋設之偵測 器較多 2.時制決策運算功 能尚需加入其他 功能,方能配合 實際狀況,如號 誌連鎖與機車之
17 比較項目 固定時制 動態查表 動態計算 全動態 2. 無法因應 特殊事故 3. 時制計劃 更迭不易 4. 缺少即時 蒐集交通 資訊之偵 測器 運作績效 5.時制計劃之查表方 式影響運作績效 計 劃 較 為 費時 處理 資料來源:林豐福等(2004) 2.2.2 高速公路先進交通管理 高速公路先進交通管理系統,主要係將路段範圍內運用資料蒐集子系統之各項蒐 集方式與設備,將高速公路之交通資訊經由通訊傳輸子系統,傳至交控中心之電腦處 理,據以研析交通策略及反應計劃後,經由傳輸子系統及資訊顯示子系統,將路況及 各種管制訊息傳達給用路人,以達到通報、預警、指引、事故處理、急難救助等功能。 為達成上述各項功能,發揮高速公路通車後之預期效益,除需有完善之交通控制 硬體建設外,相關管理軟體設施亦需搭配完成,使整體路網能達到減少壅塞產生之延 滯、降低交通事故發生之機率、加速事故處理時效、有效提供用路人資訊、迅速協助 用路人解決突發性困難及有效作為交通改善計劃之依據,以節省旅行時間、提高運輸 效率、增加行車安全及降低運輸能源消耗等為終極目標。(李宏徹等,2004) 張景帄等(1996)闡述高速公路控制及管理系統設計基本的概念,乃在於安全及 有效範圍內,使各道路之車流量接近道路容量。控制策略上,通常以最大可容納延人 公里及延車公里為評估原則。例如給高乘載車輛最大的優先權,以減少在入口匝道等 候長度。當高速公路主線產生擁擠時,系統必頇改變策略,改由另一套管理策略運作。 當系統出現運作上的瓶頸後,系統必頇儘快排除高速公路事件,並恢復系統原有服務 水準。詳細之控制與管理策略敘述如下: 一、設計目標
18 高速公路路網交通管理系統在設計時,應提供不同控制系統功能,以因應當前已 知及未來可預見的交通問題,以及配合未來系統發展需要。包括系統正常運作狀況管 理、交通擁擠狀況偵測管理、意外事故的偵測與回報、利用交通管理系統資訊互換以 促進交控策略運用的協調。系統控制策略如圖 2.2 所示。 等候線長度監視 資料處理 使用者介面 事件偵測 決定事件 控制區域 事件通知 操作員 決定事件長度 選擇反應計劃 CMS資訊 自動反應 事件通知 操作員 反應計畫 解除 反應計劃 管理 壅塞偵測 與管理 營運系統 警報 事件或事件更新 反應計劃 持 續 事 件 錯 誤 警 報 事 件 結 束 或 事件產生 等候線結束訊息 平 均 佔 有 率 資 料 反 應 計 劃 解 除 事件管理功能 資料來源:張景帄等(1996) 圖 2.2 高速公路即時系統控制策略 二、交通控制區段 因高速公路控制狀況及實施條件均有不同,為使高速公路控制,能按原訂計劃操 作,因此將高速公路分割為具有相似特質的控制區段及不同的次系統,每個次系統可 能包括數公里的區段。並經過偵測器連線定時傳回資料,計算高速公路入口匝道輸入 流量,以評估次系統上游及下游交通流量,主線佔有率與服務水準。
19 三、主動預測方法 即時交控必頇在短時間內,將有關交通運作參數,迅速地彙整於即時交通資料庫 中,以供決策之用。事故預測模式的準確性會直接影響高速公路交通控制措施的準確 性。現有經驗顯示,影響不同高速公路事件最困難的變數,在於估算不同事故時,受 影響區域之交通車流狀況與事件種類間的相互影響關係。 四、動態反應管理 所有交通反應計劃均應經過事先規劃,在操作上應用動態查表法,將不同績效指 標與門檻值進行比較,由系統自動選用適合之反應計劃,以在各種交通狀況下滿足固 定服務水準之要求。每個高速公路控制次系統,均應按照系統匝道型式、幾何線型、 交通流量等因素事先選擇交通反應計劃,以儘量簡化交控操作人員在緊急狀況下所需 之交控策略。 五、交通擁擠管理 每個次系統應依預計交通流量及佔有率高低,事先規劃低流量、中等流量、高流 量以及過飽和四種狀況。在正常操作情況下,系統交通控制策略運作,應定在低流量 運作,如果交通量迅速地增加,系統則可循序改變操作及警示程度。各個控制區段中, 所有交通控制設施均需可協調操作。如流量和佔有率進一步增加達到設計容量,形成 過飽和狀況,系統可測到佔有率增加與流量減少,達到擁擠偵測管理的目的。 六、意外事故管理 高速公路交控意外事故管理系統設計,應以即時資訊提供操作員,以掌握目前車 流情形,並能夠偵測與處理事故。由於半數以上的高速公路事件會使容量減少到原本 之一半,因此有效的高速公路交通意外事故管理,必頇能夠減輕系統交通阻塞,並達 到以下四項控制目標: 1. 迅速地偵測事故發生,和及早回應意外事件處理。 2. 減少必頇經過已受影響事故區域之車輛。 3. 提供大眾運輸工具優先權處理,以期通過最大的車流。
20 4. 提供即時交通資訊,並實施交通阻塞區域強制轉向。 七、交通轉向管理 交控系統必頇盡量減低事故發生後,道路交通受影響的時間。因此系統需要具備 快速偵測、適時反應與轉移車流之能力。其次,為減少上游而來之交通量對事故路段 的衝擊,控制策略將需要確定事故的位置,配合事故上游匝道交控策略,及交通轉向 策略,以疏導車流至其他路線,減低由上游經過事故區的交通量。 以上高速公路動態交通控制之內容,相當強調對即時之交通狀況之掌握能力,並 且必頇具有短期預測的能力,以了解未來車流可能的變化情形。因此若能得知車流所 要前往的目的地,則很容易預測未來交通之變化,對於動態交通控制之評估與分析上 應有極大助益。
2.3 靜態車輛旅次起迄調查與推估方法之回顧
2.3.1 靜態車輛旅次起迄調查方法 靜態車輛旅次起迄之調查,依照交通部(1990)所編訂之交通工程手冊,節錄整 理後介紹如下: 一、路邊訪問調查法 路邊訪問調查法(Roadside Interviews)。將調查點設置於屏柵線與道路之交會點, 配合警力協助攔車接受訪問,由調查員訪問車輛上人員之起迄點、旅次目的等。在交 通量較大之調查站需採取抽樣調查,再依比例放大調查結果成為完整之起迄資料。 二、車輛牌照登錄法 車輛牌照登錄法(License-plate Studies)於屏柵線與道路之交會點上設置調查點, 將通過各調查站之車輛車牌號碼以人工抄錄、攝影、口述錄音等方法擇一記錄,若以 人工抄錄或口述錄音法,且車流量大時,可以車牌末碼進行抽樣,但各調查站必頇採 用相同之比率。記錄完成後再將各調查站之調查結果進行比對,以得到旅次起迄分佈21
矩陣。
三、明信片調查法
明信片調查法(Post Card Studies)乃於屏柵線與道路之交會處附近之號誌化路口 或收費站等處,配合警力攔車發放問卷。問卷內容包括旅次起迄點、時間、目的等, 由駕駛人於事後自行填寫並郵寄回研究單位進行整理與分析。另亦可選定交通分區, 以區內住戶為對象抽樣直接郵寄問卷,由住戶填妥後寄回。 四、電話訪問法 電話訪問法(Telephone Interviews)係利用調查訪問,在各交通分區內抽樣訪問 住戶,抽樣數至少約 25%至 35%以上之住戶,以電話訪問受訪者前一天的旅行行為, 透過資料整理,以了解交通起迄情形。 五、亮燈調查法 亮燈調查法(Lights-on Studies)大多使用於高速公路上的交織區流量調查,即兩 個起點與二或三個迄點的情況。在調查區前設立標誌以要求從某一匝道上高速公路的 車輛開啟頭燈以供辨識,並於迄點處分別記錄亮燈與未亮燈的車輛數,以計算各起迄 點的流量。 六、標籤調查法
標籤調查法(Coded Card or Tags)乃於屏柵線上發放特別製作的記號標籤給進入 研究區域的車輛,並在出口區加以觀察登錄,通常將標籤黏貼於擋風玻璃、天線、門 把等顯著且方便的地方,以便辨識。車流量較大之處必頇採用抽樣調查。 七、匝道收費站法 高速公路等封閉式道路,若為匝道收費者,則可直接統計各車輛之通過記錄以求 得起迄資料。其所獲得之資料正確性高且完整,惟台灣現行之高速公路並未採用匝道 收費,故不適用。 游政雄(1995)整理各靜態車輛旅次起迄調查方法之優缺點如表 2.2。
22 表 2.2 靜態車輛旅次起迄調查方法優缺點比較表 調查方法 優點 缺點 路邊訪問調查法 調查簡單 1.易干擾交通狀況 2.誤差較大 車輛牌照登錄法 1.不干擾交通情況 2.可得穿越性資料 1.車速高與車流量大時錄音與人工 抄錄方式不易正確讀取牌照號碼 2.當車號無法尋獲配號時,準確率 立即降低 3.攝影方式易受天候干擾 明信片調查法 1.若以攔車方式交由駕駛 人則可得穿越性資料 2.若郵寄問卷方式則省人 力且不干擾交通情況 1.回收率不高無法反映實際情形 2.若以攔車方式交由駕駛人寄回則 易干擾交通 3.若直接郵寄則無穿越性資料 電話訪問法 1.調查簡單 2.節省人力 1.僅包含家旅次,無非家旅次 2.無區外至區外之穿越性旅次 亮燈調查法 調查較簡便 1.駕駛人配合程度影響調查結果 2.僅適用二個起點的路段 標籤調查法 調查簡便 起迄對過多時則過於複雜 匝道收費站法 調查結果相當精確 需配合匝道收費,國內不適用 資料來源:游政雄(1995),本研究整理 2.3.2 靜態車輛旅次起迄推估方法 在以數學方法進行起迄推估上,重力模式為傳統上最廣為運用之方法。其源自於 牛頓的萬有引力定律,Reilly(1931)將此概念應用於都市系統之分析,認為兩地之間 相互作用與兩地之大小成正比,並與其間距離成反比,基本公式如下: Tij = KMi Mj Dbij (2.4) 式中: Tij:i 地至 j 地之旅次數。 Mi、Mj:i 地之人口數、j 地之人口數。 Dij:兩地間之距離或旅行時間。 K、b:由實驗所決定之常數,類似重力常數。
23 重力模式原自於牛頓萬有引力之概念,乃是由物理觀點所提出,應用於旅次起迄 之社會行為上,立論基礎較為薄弱。Wilson(1970)以極大熵法推導出模式,此模式 類似牛頓之萬有引力模式,但最大熵法是由統計分析所推導而出,而非如重力模式以 物理觀點所提出,故更具推理基礎。其模式如下: Tij = pi aj Pi Aj e βCij (2.5) 其中: Tij:自 i 地至 j 地之旅次數。 pi:i 地之旅次產生參數。 aj:j 地之旅次吸引參數。 Pi:i 地產生之旅次量。 Aj:j 地吸引之旅次量。 Cij:自 i 地至 j 地之旅行成本函數。 β:成本函數之參數。
2.4 動態車輛旅次起迄推估方法之回顧
傳統之起迄矩陣調查方法必頇花費大量的金錢成本與人力,且某些方法(如路邊 訪問調查法、標籤調查法等)必頇於道路上攔車進行,也會影響到車流的行進。最常 見的交通特性資料為偵測器所蒐集之道路交通量資料,偵測器可自動蒐集車流量、車 速、車種等車流特性相關資料,與起迄調查法相比相對低廉且節省人力,且不影響車 輛行進,最重要的是車輛起迄與路段交通量間存有一定關係。因此開始有以路段交通 量推估起迄矩陣之研究。 車輛起迄推估方法是以偵測器所蒐集到的路段流量資料,以模式進行反推而得到 起迄矩陣。初期發展的起迄推估法並未考慮時間因素,故為靜態推估法;但目前的交 通管理需要即時性的控制,故靜態推估法漸無法符合現行需求。因此自八零年代起, 逐漸有考慮交通量與旅次起迄量隨時間變動下的旅次起迄推估問題及相關之研究,即24
為動態車輛起迄推估方法。
江勁毅(1994)整理動態起迄推估方法之概要,利用路段流率資料來推估起迄矩 陣的方法,在邏輯上主要可歸納成兩個步驟:
步驟一:找出起迄矩陣的旅次流量(Trip Flows)與路段流率(Link Flows)間的 相互關係。 步驟二:根據所找出之關係式,利用路段流率來推導出所希望求得的起迄矩陣。 步驟一為推估動態起迄的重點,一般而言路段流率的資料是由偵測器所蒐集或以 歷史資料作為初始值。各種求解方法的差別僅在於基本假設與模式之不同。 通常在討論動態的交通資料變數,都是先將時間切成連續時段(Interval),同一 時段內之變數視為固定不變,以這一序列之時間序列資料近似動態的交通量資料變 數。流率與起迄量之間的關係式又可分為指派模式與非指派模式兩部分,以下分別介 紹這兩種模式。 一、指派模式 指派模式之重要的假設為,動態交通量指派模式可利用路段流率推估得到。由於 以上的假設,所以在路段流率和動態的交通量存在著以下的關係: Uℓ(k) =
Σ
mΣ
r δ m rℓ(k)·Br(k – m) (2.6) 其中: Br(k-m):在 k 時段中,第 r 對起迄的流量;m 為此起迄流量下,最早離開起點之時 段。 Uℓ(k):在時段 k 時,路段 ℓ 所偵測到之流率; δ m rℓ(k):在 k–m 時段時所產生之 Br(k–m),於時段 k 時到達路段 ℓ 之比例(即分配到 Uℓ (k)之比例)。 二、非指派模式25 就非指派矩陣模式而言,最主要的步驟在於求出實際流率觀測值與推估起迄流量 的分配比例值。就目前的文獻而言,多適用於單一交叉路口或者是小型的高速公路區 段。其推估式為: yj(k) = M
Σ
m = 0 j – 1Σ
i = 0 qi(k – m)·θ m ij(k)·bij(k – m) (2.7) 其中: yj(k) : k 時階中,由 j 匝道離開高速公路之車輛數。 qi(k – m) : k – m 時階中,由 i 匝道進入高速公路之車輛數。 θ m ij(k):於 k – m 時階自 i 至 j 之起迄對在 k 時階到達 j 匝道之比例。 bij(k – m):qi(k – m)中前往 j 匝道之比例。 2.4.1 高速公路動態車輛旅次起迄推估方法之演進 車輛旅次起迄推估方法之發展,可概分為三個階段。 第一階段之旅次起迄推估為靜態方法,即不考慮起迄隨時間變動之情形,用以推 估如一日或一週乃至於更長的時間單位之旅次起迄。如 2.3.2 小節所述之重力模式、極 大熵法等,其中重力模式較廣為運用。 隨著推估方法之發展,推估方法轉變為考慮起迄變化之動態模式,此即為第二階 段。其特點為並未考慮起點至迄點間之旅行時間,或假設旅行時間小於時階長度(Cremer and Keller,1983;Nihan and Davis 1987;Nihan and Hamed,1992)。其主要
推估式為: yT(k) = qT(k)B(k)+ eT(k) (2.8) 其中: yT(k):由 yj(k)所組成之 1× n 向量。 qT (k):由 qi(k)所組成之 1 × m 向量。 B(k):由 bij(k)所組成之 m × n 矩陣。
26
eT (k):誤差項所組成之 1 × n 向量。
由於忽略旅行時間之模式與事實有所不符,因此第三階段發展出考量旅行時間之 推估模式(Chang and Wu,1994;江勁毅,1997;Bhattacharjee et al.,2001;Lin and Chang,2007),其主要推估式為: yj(k) = M
Σ
m = 0 j–1Σ
i = 0 qi(k – m)·θ m ij(k)·bij(k – m) (2.9) 其中各符號之意義與(2.7)式相同: yj(k) : k 時階中,由 j 匝道離開高速公路之車輛數。 qi(k – m) : k – m 時階中,由 i 匝道進入高速公路之車輛數。 θ m ij(k):於 k – m 時階自 i 至 j 之起迄對在 k 時階到達 j 匝道之比例。 bij(k – m):qi(k – m)中前往 j 匝道之比例。 以道路上路段流率資料推估起迄之研究眾多,以下敘述其發展歷程: Robillard(1975)首先將偵測器資料運用於起迄推估上,車輛之路徑分配採用比 例指派法。此研究之路網相當簡易,其目的僅在顯示以路段交通量推估起迄之可行性, 作為此類研究之先河。Van Zuylen and Willusen(1980)以最小資訊法與極大熵法分別提出兩模式,除運 用路段交通量資料外,加入起迄之歷史資料以提高推估結果之正確性,並以實例比較 兩模式之優劣。結果顯示極大熵法之運算時間較少,且推估結果較為準確。
Cremer and Keller(1981)首先提出考慮時間因素下的動態起迄推估模式。在不考 慮起迄點間路徑選擇的情況,如高速公路、單一路線上公車或捷運上乘客的分配情形, 提出以下起迄推估法:
qi(k):k 時階中,由 i 入口進入觀測區域之車輛數。
yj(k):k 時階中,由 j 出口離開觀測區域之車輛數。
27 bij(k)需符合下列關係: n
Σ
j = 1 bij(k) = 1 i = 1,2,...,m (2.10) bij(k) ≥ 0 i = 1,2,...,m j = 1,2,...,n (2.11) bij(k) = 0 (i , j) Z (2.12) (2.10)式代表進出觀測區域之交通量守恆,即 B(k)每列之總和為 1。(2.11)限制 bij(k) 不得為負值。(2.12)表示在實際情況下某些起迄對不可能出現,例如在高速公路上自下 游之入口匝道至上游之出口匝道之比例即為零;或在禁止迴轉之路口中迴轉的車輛 比。Z 集合會隨觀測區域之實際情況而改變。(2.10~12)此三式又稱為自然限制式,為 起迄推估中相當重要而基本之限制式。 當 k 時階之長度比 i 至 j 之旅行時間長時,qi(k)、yj(k)與 bij(k)三者之關係以矩陣型 式改寫如下: yT(k) = qT(k)B(k) (2.13)Cremer and Keller(1981)以動態遞迴法進行求解,求解式為:
Δˆy'(k) =Δq'(k)·B(k – 1) (2.14)
ˆbij(k) = ˆbij(k–1) + γ ·Δqi(k)·[∆yj(k) – ∆ˆyj(k)] (2.15)
其中γ 為增益項。
Cremer(1983)提出交互相關矩陣法(method of cross-correlation matrices)求解, 以最小帄方法可推得 B 之最佳估計量為:
ˆB = Φ–1
qq· Φqy (2.16)
其中Φqy(k)和 Φqq(k)分別為 Δq(k)和 Δq(k)以及 Δq(k)和 Δy(k)之交互相關矩陣。
28 在路段流量比例分配較正確之情況下,推估結果較佳;但當流量比例誤差較大時,則 與實際結果差異較大,可知其模式受路段流量分配比例影響甚大。 要改善都市地區交通擁擠的問題,必頇分析不同時間的交通情形,如交通需求的 改變、擁塞路段的轉移、駕駛人路徑選擇的改變等。Willumsen(1984)針對不同時間 下旅次起迄的推估進行研究,其以極大熵法為模式基礎,加入時階之概念進行延伸。 研究結果顯示路徑選擇模式為影響推估結果之關鍵因素,不同路徑選擇模式對於結果 之準確性有顯著差異,因此不同之車流情況下應搭配不同之路徑選擇模式,以確保正 確之推估結果。
Cremer and Keller(1987)又提出以卡門濾波器求解的方法,其推估式為:
ˆbj(k) = ˆbj(k−1) + d(k)[yj(k) − qT(k)·ˆbj(k−1) ] (2.17)
d(k) = [P(k−1) + W]·q(k)·{qT(k)·[P(k−1) + W]q(k) + r}−1 (2.18)
P(k) = [I − d(k)·qT(k)][P(k–1) + W] (2.19)
Nihan and Davis(1987)提出不考慮起迄點間路徑選擇的推估模式,可適用於高 速公路上。其認為 Cremer and Keller(1983)的研究在需符合(2.10~2.12)三項限制式的 情況下,求解較為困難,因此提出新的推估法。 在動態推估模式下,較近期的觀測資料對於目前時階的起迄影響較大,故給予較 高的權重。運算準則為: k
Σ
t = 1 λk−tj [yj(k)− qT(k)·bj(k)] 2 (2.20) 其中 0 < λj ≤ 1,可對各估計誤差值給予不同之權重。求解(2.20)式最小,並應用卡 門濾波器得到遞迴推估值為: ˆbj(k) = ˆbj(k–1) + Kj(k)[yj(k)-qT(k)ˆbj(k–1)] (2.21)29 Kj(k) = Pj(k–1) q(k) rj(k) + qT(k) Pj(k–1) q(k) (2.22) Pj(k) = Pj(k–1)+Rj(k)- Pj(k–1) q(k) qT(k) Pj(k–1) rj(k)+ qT(k) Pj(k–1) q(k) (2.23) 除了卡門濾波器外,亦可以高斯—牛頓法進行推估。高斯—牛頓法以梯度搜尋法 為基礎,目標是求推估偏誤之標準差,結果為: ˆbj(k)= ˆbj(k–1)+ g(k)A-1q(k)[ yj(k)– qT(k) ˆbj(k–1)] (2.24)
A(k)= A(k–1)+g(k)[q(k)qT(k)–A(k–1)] (2.25)
其中: A(k) = Kj(k) k
Σ
t = 1 q(t)·qT(t) (2.26) 研究結果顯示,以推估誤差值最小為目標,以最小帄方法、卡門濾波器進行推估, 發現在最小帄方法給予特定權重的情況下,加權最小帄方法與卡門濾波器之推估結果 相似。另外又以高斯—牛頓法改善過去之梯度搜尋法之方向,研究證明高斯—牛頓法 優於梯度搜尋法,且可符合自然限制式。Bell(1991)延續 Cremer and Keller(1981、1983)、Nihan and Davis(1987)等
人之研究,鑑於之前研究大多假設旅行時間小於或恰為時間長之假設,與現實情況有 所出入,因此構建旅行時間可跨越多個時階之推估模式。 yj(k) = M
Σ
m = 0 j–1Σ
i = 0 qi(k – m)·bijm j = 1,2,…,N (2.27) bijm:自 i 入口至 j 出口,旅行時間為 m 個時階之車輛比例。 Bell(1991)即採用(2.27)式進行起迄推估,並以拉式乘數法求解。Nihan and Hamed(1992)提出固定點法(Fixed Point Approach),用以推估高速
公路動態旅次起迄量的問題。其以最大概似法為基礎,以延伸期望值最大化法求解最 大概似估計量。為了簡化問題,其假設時階長度大於道路區段內任一起迄點之旅行時
30 間,以減少參數之數目。但實際上旅行時間通常大於時階長度,因此與實務上仍有差 異。 林從遠(1992)將路段流量以啟發式演算法轉化得到路徑流量解,再由路徑流量 解獲得起迄矩陣。此方法需要有方向性之資料作為輔助,如抽樣調查資料等,故此法 較適用於高速公路之起迄推估上,而不適合用於一般路網。本研究之推估運算速度較 快,但準確性較不理想。
Chang and Wu(1994)認為Bell(1991)之研究僅能在車流穩定且非擁擠時適用。
考量各駕駛人旅行時間差異,並加入主線流率Uℓ(k)以提供更多資訊,提出新的推估模式。 考量各駕駛人車速與旅行時間上的差異,故假設 k 時階自 i 入口出發至 j 的車輛, 到達 j 出口時時階會分布於 k,k+1,…,k+M,M 表示自 i 至 j 所需的最大時階數。理 論上,各組起迄對有不同之 Mij值,但為模式敘述上之方便,故各起迄對之 Mij值皆以 M 表示。加入參數θ mij(k)代表 Tij(k – m)在 k 時階到達 j 匝道之比例。將 yj(k)改寫如下: yj(k) = M
Σ
m = 0 j–1Σ
i = 0 Tij(k–m)·θ m ij(k) = MΣ
m = 0 j–1Σ
i = 0 qi(k–m)·θ mij(k)·bij(k–m) j=1,2,…,N (2.28) 加入主線流率Uℓ(k)作為推估之輔助。Uℓ(k)之意義為k時階中,穿越ℓ區段上游邊界之 車輛數。故: Uℓ(k) – qℓ(k) = MΣ
m = 0 ℓ–1Σ
i = 0 NΣ
j=ℓ+1 qi(k–m)·θ m iℓ(k)·bij(k–m) ℓ = 1,2,…,N–1 (2.29) 由於(2.29)式包含大量參數,如θ mij(k)和bij(k),且會隨著M值變大而增加。為了運算 上的方便,需加以簡化。因此假設在同一時階進入高速公路之車輛,其旅行時間之差異 僅分布於兩個相鄰時階。故假設: tij(k):k時階中,自i匝道至j匝道之車輛之帄均旅行時間。 t0:時階長度。31 t-ij(k):inttij(k) t0 ,即 tij(k) t0 之整數部分。 t+ij(k):t-ij(k) + 1。 以上參數乃是假設k時階到達j匝道之車輛,皆是於k–t-ij(k)與k+t+ij(k)兩時階通過i匝 道,其餘m不為t- ij(k)或t + ij(k)之車輛則忽略不計,因此yj(k)與Uℓ(k)可改寫為: yj(k) = j–1
Σ
i = 0{
qi[k – t}
+ ij(k)]·θ + ij(k) ·bij[k –t + ij(k)] + qi[k – t − ij(k)]·θ − ij(k) ·bij[k –t − ij(k)] j = 1,2,…,N (2.30) Uℓ(k) − qℓ(k) = j–1Σ
i = 0 NΣ
j=i+1{
qi[k – t}
+ iℓ(k)]·θ + iℓ(k) ·bij[k –t + iℓ(k)] + qi[k – t − iℓ(k)]·θ − iℓ(k) ·bij[k –t − iℓ(k)] ℓ = 1,2,…,N-1 (2.31) 其中: θ+ ij(k)≡θ t+ij (k) ij (k),θ - ij(k)≡θ t- ij (k) ij (k) 0 ≤ i < j ≤ N 矯履文(1994)考量當時國內高速公路之上下匝道交通量資料不易取得,而收費 站之流量則相對容易,因此建立並比較在有無收費站流量、匝道流量、歷史起迄資訊 三者組合下的狀況進行起迄推估模式比較。結果顯示以結合收費站流量與歷史起迄資 訊之推估模式為佳;而運用匝道流量與歷史起迄資訊之模式次之。但由於在推估上不 考慮短途車流,僅考慮通過收費站之長途車流,故考量此限制下,若能夠取得匝道流 量,仍以運用匝道流量與歷史起迄資訊之推估模式較具有未來發展性。 游政雄(1995)依不同資料背景下建立五種高速公路起迄推估模式,分別為「模 式一:僅有收費站流量之推估模式」、「模式二:有上下匝道及路段流量之推估模式」、 「模式三:有上下匝道及收費站流量之推估模式」、「模式四:有收費站流量及歷史資 訊之推估模式」、「模式五:有上下匝道流量及歷史資訊之推估模式」,並以牌照登錄法 取得中山高速公路北部路段之起迄資料作為驗證之用。研究結果顯示在無歷史起迄資 訊下,模式二與模式三之推估結果誤差不大,而需要歷史起迄資訊之模式四與模式五32
受到歷史起迄資訊之正確性影響甚大。
Camus et al.(1997)建構出適用於高速公路交通管理之用的及時動態起迄推估模 式,此模式藉由偵測器流量對上一時階之高速公路起迄進行推估,並同時對下一時階之 起迄情形進行預測。
江勁毅(1997)針對 Chang and Wu(1994)之模式加以修正。Chang and Wu 所建
構之高速公路匝道與主線流率之關係式(2.30~31),其中(2.30)式中θ mij(k)變數之意義 為:「在(k–m)時階時產生的 Tij(k–m),而在 k 時階時到達之車輛數∕Tij(k–m)」,表示 某一起迄點下因到達時間不同所產生之變異。而(2.31)式中θ miℓ(k)變數之意義為:「在 (k–m)時階產生的 Tij(k–m),會在 k 時階時經過路段 ℓ 之比例」,代表在未到達迄點前 之旅行過程中,經過某一位置之比例。因此江勁毅認為,主線道流率資訊雖然可以提 供額外的資訊,但因為兩式之變數θ m ij(k)定義不同,又使得模式的變數增加,因此實際 上只是使得求解更加困難,而 Chang and Wu 求解時並未將其視為不同,顯然有誤。因 此為使模式在操作上可行,應將(2.31)式自模式中去除,則無變數θ mij(k)定義不同之問 題,又可增加求解時之運算速度。另一方面,Chang and Wu 之模式利用 q = ρ·v 之關 係式推估各時階、各路段之帄均速度,再據以推估帄均旅行時間。但當車流量大於道 路容量發生擁擠後,此關係式便不適用,因此江勁毅改採 Greenshield 模式計算旅行時 間,因其速度與密度間之關係為線性,便於計算。 胡守任(2001)以卡門濾波器求解以路段流量反推起迄之問題,並探討不同交通 需求模式之有效或適用性之影響,分析低、中、高三種不同的交通需求型態。結果顯 示在中、低交通需求型態下,推估結果良好。而在高需求下之十組起迄對有七組符合 95%之信賴水準。可看出隨交通需求增加或帄均速率下降或起迄對之距離增加時,因 車流干擾因素增加,推估結果之誤差亦有增加之趨勢。整體而言卡門濾波器由於可產 生不偏與線性最小估計值,且可納入其他可量測之相關資訊,因此較其他運算方法為 準確。