採用Σ-Δ調變之全橋功率放大器
77
0
0
全文
(2) 採用 Σ-∆ 調變之全橋功率放大器. 研究生:陳. 鏗 元. 指導教授:胡 竹. 生 博士. 國立交通大學電機與控制工程研究所碩士班. 摘. 要. 本論文以 Σ-∆ 為調變基礎設計並實現一數位功率放大器,以切換式訊號為 輸入之數位功率放大器相較於類比 A/B 類,擁有體積小、功率效益較高的優點, 而其重點在於可將任意訊號調變為單位元表示之前級訊號調變器,相較於常見的 PWM 調變法,Σ-∆ 調變器沒有倍頻雜訊,其較低的切換次數使系統減少切換損 失。本論文將證明與分析高階 Σ-∆ 系統於單位元與 1.5 位元運算之穩定特性, 由結果可以知道 1.5 位元運算於雜訊抑制的能力,以及切換次數之減低皆優於單 位元運算。數位 Σ-∆ 調變器將實現於 FPGA,並配合後級之全橋功率放大器, 作雙聲道之音頻訊號的放大與撥放。. i.
(3) A Full-Bridge Class-D Amplifier Using Sigma Delta Modulation. Student: Kang-Yuan, Chen. Advisor: Prof. Jwu-Sheng, Hu. Institute of Electrical and Control Engineering National Chiao-Tung University. ABSTRACT This thesis proposes a design of full-digital class-D amplifier using sigma-delta modulation. The class-D amplifier operating the MOSFET (or IGBT) in saturation mode has the advantages of smaller size and higher power efficiency over traditional class-A/B ones. The underlying principle of generating the switching command is to convert the input signal into an oversampled binary signal. Compared with PWM modulation, sigma-delta modulation produces less distortion, noise and number of switching. The design and stability analysis of digital sigma-delta modulation are studied in this thesis using both 1- and 1.5-bit quantization schemes. The results show that the 1.5-bit scheme further improves the noise shaping performance and switching number reduction. The digital sigma-delta modulator is implemented on an FPGA and a full-bridge power stage is constructed to verify the design method. The resulting experimental platform is able to achieve a stereo amplifier with 22.05KHZ audio bandwidth.. ii.
(4) 誌謝 在這兩年期間,我要感謝我的指導老師胡竹生教授,他於專業領域上的教導 讓我體會不同的思考模式以及求學該有的態度,並了解老師於培育學生的耐心; 另外要謝謝林清安教授,他不凡的頭腦卻細心認真的態度讓人佩服不已,並給我 再一次學習線控的機會,讓我看到身為一個敬業的授業者所採取的態度。 同時要感謝實驗室所有成員,讓我在這兩年的研究充滿歡樂充實的回憶:沒 有架子且實作超強的立偉學長,有實力又談笑風生的价呈,風趣自信且帥氣的宗 敏,帶古怪思考並樂於助人的維瀚兄,聰明且另類反向思考的鳥哥,耐心又想法 奇異冷的 pazz,作事負責有條理且樂觀的康康,講話有趣、理論基礎很好的憶如 學姊,口才好、想法獨特、多才多藝的安吉兄,有歡樂配飯且很照顧別人的家瑋, 每次來找吃飯的群棋,脾氣很好的哈兄,人氣旺的岑思,認真細膩的興哥,熱心 隨和的晏榮,以及實驗室學弟妹們,鳥蕙、佩靜、朱木、螞蟻、恆嘉、耀賢、融 哥。 此外要感謝我的家人,總是支持我的決定,讓我每次回家,一掃疲累並重新 出發;媽媽有條理的分析事物,爸爸無限的慈愛,以及哥哥務實的建議,讓我於 生活中受益良多。. iii.
(5) 目 摘. 錄. 要.............................................................................................................................i. ABSTRACT..................................................................................................................ii 目 錄...........................................................................................................................iv 圖列...............................................................................................................................vi 表列...............................................................................................................................ix 第一章 序論..................................................................................................................1 1.1 簡介 .....................................................................................................................1 1.2 目標 .....................................................................................................................4 1.3 論文貢獻 .............................................................................................................4 1.4 章節概要 .............................................................................................................5 第二章 調變理論..........................................................................................................6 2.1 PWM(PULSE-WIDTH-MODULATION) ...................................................................6 2.2 CONSTRAINT OPTIMIZATION MODE ......................................................................8 2.3 SIGMA-DELTA MODULATION (Σ—∆) .................................................................10 2.3.1 Σ—Δ之發展由來....................................................................................10 2.3.2 Σ—Δ之系統效果....................................................................................12 2.4 統整與比較 .......................................................................................................13 2.5 1.5 位元運算......................................................................................................14 第三章 Σ-∆調變原理與設計 ..................................................................................17 3.1 Σ-∆之穩態分析...............................................................................................17 3.1.1 系統之化減................................................................................................17 3.1.2 系統之設計概念........................................................................................19 3.1.3 輸出觀點來看系統與Noise Shaping 效果 ..............................................20 3.1.4 狀態之穩態表示........................................................................................21 3.2 Σ-∆之穩定條件...............................................................................................22 3.3 設計範例(四階Σ-∆與高通NOISE SHAPING)...................................................25 第四章 1.5 位元Σ-∆調變機制 ................................................................................29 4.1 1.5 位元運算概念..............................................................................................29 4.1.1 1.5 位元於Σ-∆之運算..............................................................................30 4.2 1.5 位元Σ-∆之穩定度分析 ............................................................................32 4.2.1 1.5 位元系統描述.......................................................................................32 4.2.2 1.5 位元之系統穩定性...............................................................................33 4.2.3 1.5 位元系統之輸入範圍...........................................................................35 4.3 1.5 位元Σ-∆調變設計.....................................................................................38 4.3.1 設計範例....................................................................................................38 iv.
(6) 4.3.2 切換次數之比較........................................................................................41 第五章 硬體架構與實現............................................................................................42 5.1 USB 介面 ..........................................................................................................43 5.1.1 硬體介紹....................................................................................................43 5.1.2 USB實做.....................................................................................................44 5.2 FPGA .................................................................................................................47 5.2.1 硬體介紹(Altera FLEX10K Emulation Board).........................................47 5.2.2 FPGA實作 ..................................................................................................48 5.3 功率級 ...............................................................................................................53 5.3.1 硬體介紹....................................................................................................53 5.3.2 功率級實作................................................................................................54 第六章 效能評估與比較............................................................................................57 6.1 訊號雜訊比(SNR, SIGNAL-TO-NOISE RATIO) ...................................................57 6.1.1 訊號級電壓量測與SNR比較....................................................................57 6.1.2 輸出級電壓量測與SNR比較....................................................................60 6.2 系統功率 ...........................................................................................................61 6.2.1 單位元輸出輸入功率................................................................................61 6.2.2 1.5 位元輸出輸入功率...............................................................................62 第七章 結語................................................................................................................64. v.
(7) 圖列 圖 1-1、D 類放大器示意圖--------------------------------------------------------------------1 圖 1-2、全數位式音頻放大器示意圖--------------------------------------------------------2 圖 1-3、全數位式音頻放大器示意圖--------------------------------------------------------4 圖 1-4、實作的組成結構;其中虛線部份為實做完成的部分----------------------------5 圖 2-1、Pulse-Width Modulator 示意圖-------------------------------------------------------6 圖 2-2、NPWM UPWM 以及 DIPWM 運作圖[5]------------------------------------------- 7 圖 2-3、限制條件之最佳化輸出處理方塊圖------------------------------------------------8 圖 2-4、Constrained Optimization Mode 處理法之訊號----------------------------------10 圖 2-5、數位音訊簡易流程圖----------------------------------------------------------------10 圖 2-6、Δ調變之問題--------------------------------------------------------------------------11 圖 2-7、(a) Inose Δ調變器 (b) 一階Σ-Δ調變器-----------------------------------11 圖 2-8、一階數位Σ-Δ調變器--------------------------------------------------------------12 圖 2-9、n 階數位Σ-Δ調變器---------------------------------------------------------------12 圖 2-10、Σ-Δ調變器之輸出訊號---------------------------------------------------------13 圖 2-11、為提升小訊號放大時的效能而產生不同的調變方---------------------------14 圖 2-12、Apogee 的三元調變與傳統 PWM 運作比較-------------------------------------15 圖 2-13、德州儀器的差動調變方法---------------------------------------------------------16 圖 3-1、n 階Σ-Δ調變器---------------------------------------------------------------------17 圖 3-2、化簡後的 n 階Σ-Δ調變器方塊圖-----------------------------------------------18 圖 3-3、Σ-Δ調變之設計概念--------------------------------------------------------------19 圖 3-4、W −1 之頻率響應-----------------------------------------------------------------------20 圖 3-5、Σ-Δ調變器方塊圖 —第一階---------------------------------------------------22 圖 3-6、NTF 頻率響應圖-----------------------------------------------------------------------25 圖 3-7、完整四階 Σ-∆ 系統設計等效示意圖---------------------------------------------26 vi.
(8) 圖 3-8、Σ-∆ 系統各階狀態變化圖----------------------------------------------------------27 圖 3-9、單一位元數位訊號頻譜與時域圖-------------------------------------------------27 圖 3-10、PWM 數位訊號頻譜與時域圖-------------------------------------------------------28 圖 4-1、切換開關示意圖-----------------------------------------------------------------------30 圖 4-2、切換訊號與開關波形關係圖--------------------------------------------------------30 圖 4-3、單位元與 1.5 位元系統輸出之頻譜圖---------------------------------------------31 圖 4-4、1.5 位元 Σ-∆ 架構圖-----------------------------------------------------------------32 圖 4-5、1.5 位元 Σ-∆ 架構圖-----------------------------------------------------------------33 圖 4-6、1.5 位元 Σ-∆ 示意圖-----------------------------------------------------------------33 圖 4-7、系統架構圖-----------------------------------------------------------------------------38 圖 4-8、Σ-∆1.5 運算系統各階狀態變化圖------------------------------------------------40 圖 4-9、1.5 位元數位訊號頻譜與時域圖---------------------------------------------------40 圖 4-10、單位元與 1.5 位元切換次數-輸入訊號關係圖---------------------------------41 圖 5-1、全數位化音頻放大器系統方塊圖-------------------------------------------------42 圖 5-2、數位式音頻放大器實體照-----------------------------------------------------------42 圖 5-3、DMA- Cypress USB AN2131 控制單板---------------------------------------------43 圖 5-4、USB 介面設計流程圖-----------------------------------------------------------------46 圖 5-5、Altera FLEX10K Emulation Board--------------------------------------------------47 圖 5-6、USB/FPGA 資料存取時序圖-------------------------------------------------------48 圖 5-7、FIFO 架構圖---------------------------------------------------------------------------49 圖 5-8、存取/寫入指標與 FIFO 狀態操作示意圖----------------------------------------50 圖 5-9、四階Σ-Δ調變器控制圖-----------------------------------------------------------51 圖 5-10、一階 Σ-∆ 調變器執行順序圖-----------------------------------------------------52 圖 5-11、雙聲道 Σ-∆ 調變器之 FPGA 架構圖--------------------------------------------52 圖 5-12、FPGA 實現之編譯結果------------------------------------------------------------53. vii.
(9) 圖 5-13、TAS5121 腳位圖---------------------------------------------------------------------54 圖 5-14、輸出功率與 P_Vdd 關係圖---------------------------------------------------------55 圖 5-15、輸出功率與 Power_Efficiency 關係圖--------------------------------------------55 圖 5-16、功率放大器啟動程序---------------------------------------------------------------56 圖 6-1、系統訊號表示圖-----------------------------------------------------------------------57 圖 6-2、單位元訊號級輸出電壓時域圖-----------------------------------------------------57 圖 6-3、單位元訊號級輸出電壓頻域圖-----------------------------------------------------58 圖 6-4、1.5 位元訊號級輸出電壓時域圖---------------------------------------------------58 圖 6-5、1.5 位元訊號級輸出電壓頻域圖---------------------------------------------------58 圖 6-6、1.5 及單位元訊號級輸出電壓頻譜比較圖---------------------------------------59 圖 6-7、訊號級輸出訊號 SNR 與輸入振幅關係圖---------------------------------------- 59 圖 6-8、單位元輸出級電壓頻域圖-----------------------------------------------------------60 圖 6-9、1.5 位元輸出級電壓頻域圖---------------------------------------------------------60 圖 6-10、單位元系統輸入電流與電壓圖---------------------------------------------------61 圖 6-11、單位元系統輸出電壓與電流圖---------------------------------------------------61 圖 6-12、1.5 位元系統輸入電流與電壓圖--------------------------------------------------62 圖 6-13、1.5 位元系統輸出電壓與電流圖--------------------------------------------------63. viii.
(10) 表列 表 1-1、D 類及類比功率放大器比較表-----------------------------------------------------2 表 2-1、訊號調變法比較表------------------------------------------------------------------13 表 3-1、四階 Σ-∆ 系統係數------------------------------------------------------------------26 表 4-1、1.5 位元運算輸出-輸入關係表-----------------------------------------------------31 表 4-2、四階 Σ-∆ 系統係數------------------------------------------------------------------40 表 5-1、USB 介面輸入輸出時序--------------------------------------------------------------44 表 5-2、四階 Σ-∆ 調變器實作係數---------------------------------------------------------51. ix.
(11) 第一章 序論 1.1 簡介 功率放大器於音響系統的撥放過程中,扮演非常重要的角色,傳統的方法是 以 Bipolar 為元件作類比式線性功率放大(Class A or Class AB),推動後級喇叭, 而此方法的功率效益約 40~60%之間,其損失之能量以熱能的形式散逸,因此需 要借助散熱元件避免過熱的問題。 然而近二十年來由於製作 Power MOS 的技術發展,使數位式功率放大器(或 稱 D 類功率放大器;digital power amplifier, or Class D Amplifier)漸漸受到矚目。 D 類放大器最早是由 Baxandall 於 1959 年所提出,不同於類比形式,D 類放大器 以開關模式運作[1],此關鍵使其功率效益高達 90%以上。圖 1-1 為其示意圖,當 元件不導通(turn off)時,流過之電流為零;而當元件導通(turn on)時,其跨壓幾 乎為零,致使元件幾乎沒有能量損耗幾,對於理想開關,由於沒有切換損失,可 達 100%之功率效益,以目前之 Power MOS 技術,已經可將功率效益提升至 95%[2]。. 圖 1-1、D 類放大器示意圖 1.
(12) 由於功率效益的提高,使 D 類放大器於成本及體積上皆優於 AB 類放大器, 例如其較低的電流供應需求可降低電源供應裝置的成本,或增加電池使用的壽 命;又如較小的熱散逸需求可縮減散熱裝置之體積(表 1-1),因此近年來於手機、 PDA、MP3 Player 等應用漸受歡迎[3]。. Efficiency Class A/B Class D. Size/ Weight. Heat. Power Supply. EMI. Low. Large. High. Bipolar. Almost None. High. Small (> 3/4 reduction). Low. Unipolar. High. 表 1-1、D 類及類比功率放大器比較表. 目前聲音及音樂的儲存或傳送已經幾乎全部數位化。例如 CD 唱盤、MP3 Player、數位通訊(GSM, CDMA)、VOIP 及數位錄音等,然而需要播放時,大部 分方法均需透過數位類比轉換器(DAC,Digital to Analog Converter),將數位訊號 轉換為類比訊號,再輸入功率放大器後驅動喇叭。然而採用 D 類功率放大將可 實現一個全數位式音頻放大器(圖 1-2),免除 D/A 轉換介面的傳輸失真,使得從 音源數位取樣後到播放間的所有過程全部數位化。. 圖 1-2、全數位式音頻放大器示意圖. 2.
(13) 採用 D 類放大器的另外一個重點為切換式訊號的產生方法,一個好的切換 訊號才能極盡展現 D 類放大器高功率效益的優點[1]。目前可見的架構為構造簡 單的 Pulse-Width-Modulation(PWM)調變,以及 Sigma-Delta Modulation(Σ-∆)。. 其中,PWM 如其名,是將輸入訊號的大小訊息,經過三角波比較後,即轉 換為雙位準( ±1 )的時間寬度,當輸入訊號較大,則高準位的時間較長,反之亦然, 對於理想的 PWM,其所產生的切換式訊號沒有諧波失真的問題[4][5],然而實際 上 PWM 方法會因為三角波的線性度影響[4],以及數位式調變[6]而產生倍頻雜 訊(THD: Total Harmonic Distortion),因此為了降低頻帶內不必要的成分,常見設 計將 PWM 配合 Noise-Shaping Block 使用[7][5]。而其問題在於數位實現時,為 了增加 duty cycle 精度所需的時脈將高達 Giga Hz[5];除外,於高切換頻率情況 時,會有 EMI 的問題[8],同時,在每一個三角波週期內必定有一次切換,造成 功率級之切換損失無法減低。. 而 Sigma-Delta Modulation 源自 Frank de Jager 於 1952 年提出之 Delta Modulator 架構[9],其原理為利用過高的取樣頻率補償訊號位元數之降低[10], 使單位元切換訊號能表示 16 位元精度的輸入訊號,其中量化誤差將經由回授路 徑通過回圈轉移函數,於頻帶中重新分布,使誤差之能量分布於高頻[11],增加 追蹤訊號之準確度,雖然一階的 Σ-∆ 系統是穩定的,但於高階設計上,將有穩定 性以及是否符合規格要求的問題,且此架構較為複雜,實現上需要乘法器及較多 的邏輯。. 最後圖 1-3 所示為數位放大器之基本架構,其中輸入為 16 位元之音源訊號, 首先將此取樣頻率為 44.1kHz 的訊號作升頻動作,再注入調變器作處理,主要目 的為,以單位元訊號作快速切換以取代 16 位元訊號之表示,因此當單位元訊號 通過低通濾波的時候,可以被還原成原本的音樂訊號之類比形式。. 3.
(14) 圖 1-3、全數位式音頻放大器示意圖. 1.2 目標 本論文將以 Sigma-Delta 為基礎,證明與分析高階 Σ-∆ 系統的穩定特性, 並設計一穩定之四階系統,於設計範例中將說明 Σ-∆ 具有可任意分佈量化誤差 頻率響應的特性。. 同時為了延長開關元件之壽命,減少切換損失,降低高頻成分,以及改善小 訊號輸入之響應效果,本論文將闡釋 1.5 位元運算之 Σ-∆ 系統的運作概念,並 證明其穩定性,且說明 1.5 位元運算相較於單位元運算,有切換次數更低,訊號 雜訊比更高的優點。. 最後達成將所設計之調變系統實現於研發測試版,並配合後級之全橋功率放 大器,且於放大器輸出端不需要低通濾波器,直接輸入喇叭作音頻訊號之撥放, 所量測的實際訊號與數據將於本論文最後分析與討論。. 1.3 論文貢獻 本論文以[29]為基礎,將其實作平台做高頻響應的改善,並將後級的半橋架 構改為全橋式功率放大器,使系統功率效益達 80%以上,除外,本論文證明 1.5 位元運算的系統穩定特性,並模擬比較單位元與 1.5 位元之差異。. 4.
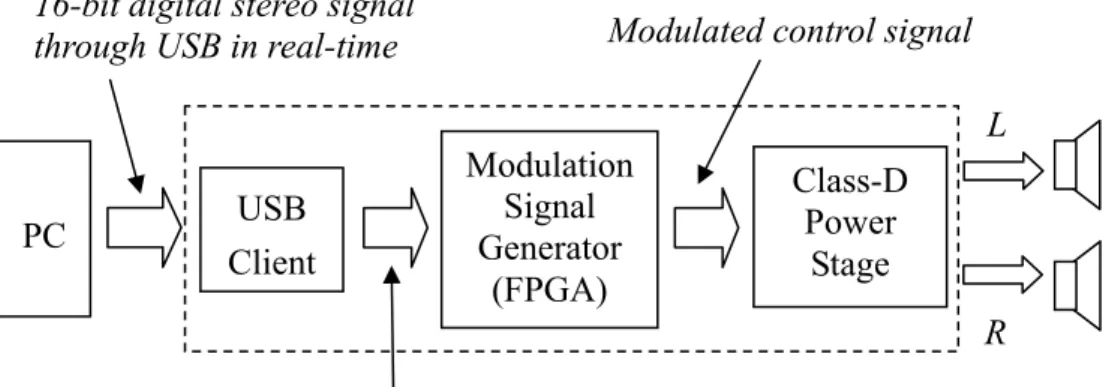
(15) 1.4 章節概要 本論文將依序介紹之重點如下: 第二章將說明調變訊號的產生方法與比較,並於最後說明為了解決小訊號小 功率系統之低效能情形,所提出之目前可見的功率效益改善方法;第三章則介紹 單位元 Σ-∆ 調變參數設計原理,並分析 Σ-∆ 系統,找出其穩定性的條件,末 段將根據設計需求推導出實作所需之應用參數;第四章說明 1.5 位元 Σ-∆ 之運 作概念,以及系統之穩定條件,而最後的系統係數設計將與單位元 Σ-∆ 作系統 響應以及切換次數上的比較;第五章介紹平台架構及說明如何實現全數位化音響 系統;第六章提出該數位化音訊平台之效能評估與比較;最後第七章為結論及心 得總結。 其中,實作平台組成結構如圖 1-4 所示。亦即從 PC 端的 USB 埠及時接收數 位音樂,並透過一 Σ-∆ 調變器將雙聲道 44.1KHz、16-bit 的 PCM 訊號調變為控 制訊號,經 Class-D 功率級放大器後輸出。. 16-bit digital stereo signal through USB in real-time. Modulated control signal L. PC. USB Client. Modulation Signal Generator (FPGA). Class-D Power Stage R. Streaming audio data. 圖 1-4、實作的組成結構;其中虛線部份為實做完成的部分. 5.
(16) 第二章 調變理論 對於將 16 位元訊號轉換為單位元訊號流形式的方法除了最常見的 PWM 以 及尚在研究階段的 Constrained Solution 之外,還有目前逐漸成熟之Σ—Δ方法, 本章主要介紹此三種方法之原理與響應效果,並統整比較各方法之優劣,最後要 介紹目前可見之 1.5 位元調變法。. 2.1 PWM(Pulse-Width-Modulation) 由於構造簡單,PWM 為傳統之 D 類放大器常用的前級調變法,通常為類比 形式。如圖 2-1,其運作是將輸入訊號與三角波作比較,如果比較結果大於零, 則輸出 Vswitch 為高準位,反之,則為低準位,而切換訊號的切換速度與三角波 之頻率有關,其頻率愈快,則切換週期愈短,訊號追蹤之準度愈高;PWM 之原 理為固定切換週期,調整脈波寬度,以改變輸出電壓的大小,使其正比於輸入[6]。. 圖 2-1、Pulse-Width Modulator 示意圖. 對於數位之實現[5][12][13],不同於類比形式,其輸入訊號為取樣後的訊號, 即所謂的 Uniform PWM(UPWM)架構,而當取樣頻率無限大時,則為理想狀態稱 NPWM(Natural PWM),圖 2- 2 為運作比較,系統於 NPWM 情況下,不會產生諧. 6.
(17) 波失真,而對於有取樣動作之 UPWM 卻會產生無法容忍的諧波失真,若希望藉 著取樣頻率之提高降低諧波成分,將使系統之時脈需求提高。. 圖 2-2、NPWM UPWM 以及 DIPWM 運作圖[5]. 基 於 上 述 實 現 上 之 困 難 , [5] 提 出 一 解 決 方 法 為 Direct Interpolation Sampling,即以線性內插方式,補償 UPWM 輸入訊號之不足(圖 2-2),由於線性 內插可以採相似三角形運算得到方波寬度,不增加運算複雜度;而[13]所提出的 增強型 PWM 取樣法,是以調整某參數因子,使取樣週期內的點作非線性內插, 其脈波寬度也可依數學式作預測。這些方法所期望的目的皆為希望藉由不變的取 樣頻率,達到調變訊號最接近 NPWM 的狀態。. 對於 PWM 數位化的重點,除了輸入訊號的取樣率之外,仍有切換波成形的 問題,由於數位形式切換,其最短切換週期將受限於時脈頻率,若希望切換波形 7.
(18) 達到 16 位元的精度,將產生內頻過高的問題[12]( 例如對於一個 16 位元準度的 PWM 系統,輸入為 44.1kHz 取樣的音樂訊號,若以 32 倍取樣頻率運作,則其內 部時脈至少需為 216 × 44.1k × 32 = 92.48G ),因此,[5]之作者提出,先將輸入訊號 作前級 Noise Shaping 的處理,使其位元數降低,再輸入 PWM 作調變波的產生, 由於訊號位元數降低,可大幅減低高時脈的需求,同時前級的雜訊重新分佈處 理,可將因為降低位元數所產生的量化雜訊,移至頻帶外,因此仍然保有訊號之 精度。. PWM 之應用近年來於音訊的處理如 TI 的 5000 系列,其中 TAS5036[14]更 為六聲道 PWM 處理器。. 2.2 Constraint Optimization Mode 此方法是以[15]為基礎,採有限制條件之輸出為出發點,在達到系統 Cost Function 為最小的情況下,找出最佳輸出值的解。其系統如圖 2-3,其中陰影部 分為開迴路系統,而開迴路系統之輸出會作最佳化運算回授至輸入,希望達成 y 與輸入相差愈小愈好,其中回授訊號被限制為只有 ± 1 兩種準位。. 圖 2-3、限制條件之最佳化輸出處理方塊圖. 最佳運算方塊的設計方法與系統的 Cost Function 之選取有關,在此由於希 8.
(19) 望得到輸出 y 與輸入 r 可以愈相似愈好,因此選擇 Cost Function:. VN =. t = k +1. ∑ [r (t ) − y(t )] Q[r (t ) − y(t )] +[r (k + 2) − y(k + 2)] T. T. P[r (k + 2) − y (k + 2)](2.1). t =k. 其中 Q, P ∈ R1x1 且 Q > 0, P > 0. x(k + 1) = Ax(k ) + Bu ' (k ) 由系統方程式: where A ∈ R 2 x 2 , B ∈ R 2 x1 , C ∈ R1x 2 y (k ) = Cx(k ) 帶入式(2.1),再對 u 做微分,可求得最佳解:. 1 − ⎡C T QCA⎤ ⎡C T ⎤ ⎡ u (k ) ⎤ 2 T { ( ) = − Φ − W x k ⎢ T ⎥ ⎢ T ⎥ [Qr (k + 1) + Pr(k + 2)]} ⎢u (k + 1) ⎥ C PCA ⎣ ⎦ opt ⎣ ⎦ ⎣C ⎦. B 0 C T QC 0 2x2 其中 W = ΦT [ ] Φ ∈ R , Φ = [ ] ∈ R4x2 T AB B 0 C PC 由於 Cost Function 自由度大,採此種方法不但可以產生期望的切換波,同 時也可以將任意所期望的系統特性考慮進去(例如:切換次數、狀態之大小等 等),再加以不同之權重,並不會造成系統更複雜的情況。. 然而對於此方法之開路系統的選取,卻有穩定性問題,由於其回授為非線 性,無法依線性系統中的穩定性來判斷,經過幾次試驗發現當系統高於二階時, 極容易發生不穩定情況;因此對於音頻訊號之應用,只能將雜訊推至某一定程度 之高頻地帶,無法完全消除。. 圖 2-4 為 64 倍取樣頻率情況下,處理 1kHz 且取樣頻率 44.1kHz 的訊號,左 圖為切換訊號 u 的頻率響應分佈,右圖是將切換訊號通過截止頻率為 20.05kHz 的 Butterworth 低通濾波所得到的時域圖,可以發現時域圖有所失真,而從頻域 圖上可以看到 20kHz 以內有一點雜訊分布,此時只能以提高取樣頻率作為改善。 9.
(20) 圖 2-4、Constrained Optimization Mode 處理法之訊號. 2.3 Sigma-Delta Modulation (Σ—∆) 2.3.1 Σ—Δ之發展由來 Sigma-Delta (Σ-∆)的前身,Delta Modulator 架構最早由 Frank de Jager 於 1952 年提出[9],主要應用在通訊領域。. 圖 2-5、數位音訊簡易流程圖 圖 2-5 所示為一數位音訊處理流程之簡單應用[16],其中虛線部分即為Δ調 變器架構示意圖。在此架構中,訊號經由 1-bit 量化器(1-bit Quantizer)產生 1 或-1 的切換訊號,並透過迴授路徑之積分器產生類三角波後,與輸入訊號比較;當輸 入訊號 si 大於三角波 s∆ 時,即誤差項 e 大於零, so 被量化為高準位,因此積分後. 10.
(21) 三角波增大;相反地,若輸入訊號小於三角波,即誤差項小於零,則訊號將被量 化為低準位,使得參考之三角波變小。如此反覆地切換動作,將使三角波 s∆ 近似 輸入訊號,且切換訊號透過後級之 Power Stage 功率放大,再經由積分產生近似 輸入訊號的三角波,以達到放大輸出的目的。. 圖 2-6、Δ調變之問題 然而Δ調變器有兩個缺點,第一,若輸入訊號變化劇烈,將導致輸出 so 之積 分無法追到輸入訊號;第二,當輸入訊號為直流電壓時,無法由輸出 so 得知電壓 大小,於是,1962 年 Inose 基於Δ調變器架構提出 Sigma-Delta Modulation(Σ- Δ)[17],將Δ調變器在功率級後端之類比積分器移至訊號級(Signal Stage),維持 整體的系統響應,如圖 2-7(a),如此不但可以使輸入先經過積分變為較平緩之訊 號,對於直流之輸入,系統也能有效追蹤;而若將圖 2-7(a)中的二個積分器與減 法器做等效處理,可省下一個數位積分器,即成為圖 2-7(b)之基本一階Σ-Δ架 構。. (a). (b). 圖 2-7、(a) Inose Δ調變器 (b) 一階Σ-Δ調變器 11.
(22) 圖 2-8、一階數位Σ-Δ調變器 若以 2-8 之一階架構將之串接即可實現n階Σ-∆調變器,其中an、bn、…、a1、. b1為其係數,可以控制回授路徑以及訊號路徑之各階權重。. 圖 2-9、n 階數位Σ-Δ調變器. 2.3.2 Σ—Δ之系統效果. 由圖 2-10 可以得知,當輸入 1kHz 取樣頻率為 44.1kHz 的訊號,在經過二階 之 Σ-∆ 系統,產生 64 倍頻率的單位元訊號時,其雜訊分布已經被移至高於音 頻訊號的範圍,而由右圖可見輸出之切換訊號,通過低通濾波(截止頻率為. 20.05kHz 的 Butterworth 低通濾波)之後的時序圖,若可以將系統設計為更高階數 的架構,其雜訊分布情形將更不會影響我們所要的音樂訊號。. 12.
(23) 圖 2-10、Σ-Δ調變器之輸出訊號. 2.4 統整與比較 表 2-1 為三種調變法之統整,其中 PWM 雖然構造簡易無穩定性問題,但是 其數位化效果沒有另外兩個理想,且切換次數也無法降低;而 Constrained. Optimization 之方法提供了一個適合小系統運作,且訊號響應有一定水準之要求 的應用;而Σ-Δ系統為一個可彈性設計為高階或低階之調變方法,雖然構造較 複雜,需要乘法與加法運算,但是如果設計得當,系統響應可以理想地將雜訊推 至所期望的頻帶,不致干擾輸入訊號。. PWM Constrained Optimization. Σ-Δ. 構造. Stability. THD. 時脈需求. SNR. 簡單. 穩定 二階以下 穩定 高階穩定. 高. 高 低. 低. 低. 高. 較複雜 複雜. 中 低. 表 2-1、訊號調變法比較表. 13. 高.
(24) 2.5 1.5 位元運算 針對小功率輸出或小訊號的功率放大的效率改善,在此介紹兩種方法,皆以 改變調變訊號的產生為解決方法;分別為 Apogee Technology 的三元調變(Ternary. Modulation)以及德州儀器的差動調變(Differential Modulator)[18]。 圖 2-11 說明了傳統、以及此兩種方法運算結果上的差異:. 圖 2-11、為提升小訊號放大時的效能而產生不同的調變方式[18]; (a)傳統全橋式 調變; (b) Apogee Technology 三元調變; (c)德州儀器差動調變 Apogee Technology 的三元調變是採用 PWM 調變方法[19],而輸出端電壓除 了 ±1 之外多了一個 0 準位,圖 2-12 顯示輸入訊號與輸出之關係,目前採用此方 法之音訊處理應用有 Apogee 的 DDX2000 系列[20],可搭配 Apogee 的功率級. DDX2060 做雙聲道的功率放大,然而由於採 PWM 運算,其取樣頻率需高達輸 入取樣的 256 倍,而輸出則需低通濾波,將頻帶外雜訊濾除。. 14.
(25) 圖 2-12、Apogee 的三元調變與傳統 PWM 運作比較. 德州儀器的差動調變則採取正電流與負電流切換的方式,當輸入電壓為零 時,其兩輸出為 duty cycle=50%的方波,平均電流值為零,而當有輸入電壓值時, 則兩輸出端調整各自的 duty cycle,產生差動電流(如圖 2-13)。由於無法取得實 際運算方法,在此判斷可能的運算法為,先將輸入訊號經過傳統 PWM 做運算 後,所得的脈波寬度則為兩輸出訊號(OUTP、OUTN)之間的相位差。由於這個做 法是以 duty cycle 為出發點,因此使用數位調變時,其解析度的提升仍需要較高 的時脈(clock rate)。 本論文將於下兩章依[21]提出之方法,說明Σ-Δ架構之 1.5 位元調變,由 於此方法只改變原Σ-Δ架構之比較器運算,因此其電源供應及系統取樣頻率皆 不受影響,且由於Σ-Δ本身的切換次數較 PWM 低,於放大後的輸出,不需低 通濾波即可直接經由喇叭撥放。. 15.
(26) 圖 2-13、德州儀器的差動調變方法. 16.
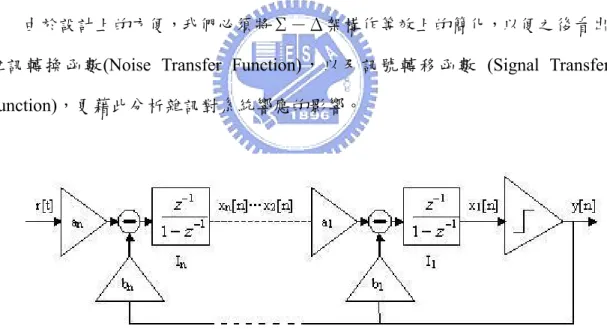
(27) 第三章 Σ-∆ 調變原理與設計 基於 Σ-∆ 之種種優勢,本章將基於[11]介紹此調變方法之設計概念及設計 流程,首先於 3.1 做系統分析了解穩態時各狀態的情況,並基於化減形式說明設 計概念,接下來於 3.2 中說明穩定條件,最後在 3.3 的設計範例說明實作中所採 用的係數。. 3.1 Σ-∆ 之穩態分析 3.1.1 系統之化減 由於設計上的方便,我們必須將Σ-Δ架構作等效上的簡化,以便之後看出 雜訊轉換函數 (Noise Transfer Function) ,以及訊號轉移函數 (Signal Transfer. Function),更藉此分析雜訊對系統響應的影響。. 圖 3-1、n 階Σ-Δ調變器 根據圖 3-1 之 n 階Σ-Δ,可以依每一個數位積分器,寫出下列 n 階系統之 狀態方程式,以及取 Z 轉換之方程式:. 17.
(28) ⎧ ⎛ ⎞ b1 a1 ⎪ x1 [ n ] = x1 [ n − 1] − b1 y [ n ] + a1 x 2 [ n ] ⇒ X 1 ( z ) = ⎜ X 2 ( z ) − Y ( z ) ⎟ −1 b1 ⎝ ⎠1− z ⎪ ⎪ ⎛ ⎞ ⎪⎪ x 2 [ n ] = x 2 [ n − 1] − b2 y [ n ] + a 2 x3 [ n ] ⇒ X 2 ( z ) = ⎜ X 3 ( z ) a 2 − Y ( z ) ⎟ b2 − 1 b2 ⎨ ⎝ ⎠1− z ⎪ ⎪ ⎪ ⎛ ⎞ bn a ⎪ x n [ n ] = x n [ n − 1] − bn y [ n ] + a n r [ n ] ⇒ X n ( z ) = ⎜ R ( z ) n − Y ( z ) ⎟ −1 bn ⎪⎩ ⎝ ⎠1− z. (3.1) (3.2). (3.3). 且由(3.1)、(3.2)、(3.3)疊代,將狀態 X 2 ( z ) ~ X n ( z ) 代換為 R(z)、Y(z),最後 可得: X 1 ( z ) = W ( z )[ F ( z ) R ( z ) − Y ( z )]. (3.4). 其中. a ⎧ ⎪ F ( z ) = N ( z ) , a = a1a2 an ⎪ N ( z) ⎪ ⎨W ( z ) = ( z − 1) n ⎪ ⎪ N ( z ) = b ( z − 1)n −1 + b a ( z − 1) n− 2 + 1 2 1 ⎪ ⎩. (3.5) (3.6) + (bn an −1. a2 a1 ). 因此,可以將化簡後的 Σ-∆ 以等效的方塊圖畫出:. 圖 3-2、化簡後的 n 階Σ-Δ調變器方塊圖. 18. (3.7).
(29) 3.1.2 系統之設計概念. 由圖 3-2 可以看出,此系統輸出 y[n]所要追蹤的訊號為輸入訊號通過訊號轉 移函數 F(Signal Transfer Function)後的值 r ' [n] ,其誤差 e[n]會先通過回圈濾波器. W( Loop Filter ),再經過比較器決定輸出;因此可看出,當 e[n]>0 時,表示輸入 訊號 r ' [n] 比較大,輸出 y[n]為了追蹤輸入,則須維持大於零;同理,當 e[n]<0 時,表示輸入訊號較小,此時 y[n]應該要變為小於零的值。. W 扮演的角色為頻率選擇動作,假設 W 為低通濾波,則 Y[n]對於 r ' [n] 的低 頻成分追蹤效果較 r ' [n] 的高頻成分要好,反之亦然,其實由方塊圖 3-2 也可得 知,誤差訊號 e[n]在進入比較器之前,會先經過 W 做濾波,如果 W 是低通,則. e[n]的高頻訊息無法到達比較器,因此比較器只能針對 e[n]的低頻訊號做及時反 應,因而 Y[n]與 r ' [n] 在低頻成份的近似度較高。可以從圖 3-3 看出此設計概念, 由於 y[n]是高速切換的脈波,和輸入 r ' [n] 不可能完全一樣,但是我們可以讓這兩 個訊號在某一個頻帶非常相似,本文的應用中,則是讓他們在音頻內非常相似。. r ' [ n]. r ' [n]. y[n]. r ' [n]. Low-pass W 圖 3-3、Σ-Δ調變之設計概念. 19.
(30) 3.1.3 輸出觀點來看系統與 Noise Shaping 效果 若以輸出觀點來看,由(3.4)式可得輸出之等式:. Y = FR + W −1 X 1. (3.8). 因此可以發現,理想狀態下, X 1 =0,則輸出 Y = FR ;但是於實際系統中, 由於切換速度有限,因此不可能使 X 1 永遠為零[22];因此輸出必包含兩部分,第 一項為我們所要的訊號 FR,而另外一項為量化誤差 X 1 所造成的雜訊,所幸的 是,量化誤差會先經過 W −1 濾波,再出現於輸出 Y 中;當 FR 分布為低頻帶時, 我們可以選擇 W −1 為高通濾波器,使量化誤差於低頻的成分不會出現於 Y 中,便 可以讓 Y 的兩個訊號成分不會互相干擾。. 圖 3-4、 W −1 之頻率響應 圖 3-4 為本論文所採用之 W −1 頻譜圖,由圖可以知道 W −1 具有抑制低頻成分 而放大高頻的響應,因此,量化誤差通過 W −1 後其頻率分布會被改變,原本分布 於低頻的成分則被推至高頻處,因此Σ-Δ之另一項特性為,具有讓雜訊重新分 布的能力,在後面的設計方法中,將說明如何使雜訊分布於任意所想要的頻帶。. 20.
(31) 3.1.4 狀態之穩態表示 此部分最後算出 n 階系統之狀態變數 x m [n] , m=2,3,…n 在穩態時的最大值, 以便後面設計所需,首先由(3.8)的 Y 等式帶入(3.1)~(3.3)後,經疊帶化減可得:. ⎧ X 1 ( z ) = ( F ( z ) R ( z ) − Y ( z ) )W ( z ) ⎪ ⎪ b1 a 1⎛ ( z − 1) n ⎞ −1 X z R z z b = + − − ( ) 1 ( ) ⎜ ⎟ X1 ( z ) 1 ⎪ 2 a N z a N z ( ) ( ) ⎝ ⎠ 1 1 ⎪⎪ n ⎨ ⎛ ⎞ ⎛ b1 (1 − z −1 ) ⎞ −1 2 −1 ( z − 1) z b z − − − − a1b2 ⎟ X 1 ( z ) (1 ) (1 ) a⎜ + b2 ⎟ ⎪ ⎜ 1 N ( z) ⎪ X z = ⎝ a1 a2 ⎠R z +⎝ ⎠ ( ) ⎪ 3( ) N ( z) a1a2 ⎪ ⎪⎩ 同理, X m (z ) 與 R(z ) 、 X1 (z ) 的關係為. Xm ( z) =. 其中. a * Am ( z ) Bm ( z ) R( z) + X1 ( z ) a1a2 am −1 a1a2 am −1. N m −1 ( z ) ⎧ ⎪ Am ( z ) = N ( z ) n ⎪ n ⎪⎪ a1a2 ai −1bi * N m −1 ( z ) *( z − 1)i −1 = B ( z ) ∑ ⎨ m N i −1 ( z ) * N i ( z ) i =m ⎪ ⎪a = a1a2 an ⎪ i −1 i−2 ⎪⎩ N i ( z ) = b1 ( z − 1) + b2 a1 ( z − 1) + ... + bi ai −1. (3.9). (3.10) (3.11). a1. 最後,由(3.9)、(3.10)和(3.11),可得出 x m [n] 在穩態時的最大值為. xm. ss∞. ≈. a Am a 1a 2. ∞. a m−1. r. ss∞. +. Bm a 1a 2. ∞. a m−1. x1. ss∞. 其中 . ∞ 表示 H ∞ norm, A ∞ = sup A( z ) , . ss∞ 表示穩態之最大振幅。 z =1. 21. (3.12).
(32) 3.2 Σ-∆ 之穩定條件 在歷年Σ-Δ的研究上可以發現,係數匹配的問題使得二階以上的系統極其 不易穩定,而 2004 年於[11]及[22]所找出之穩定條件,將於此部分描述如下。. 圖 3-5、Σ-Δ調變器方塊圖 —第一階 z 第一步:量化誤差,也就是狀態變數 x1 之振幅限制. 首先由第一階之Σ-Δ可得方程式:. x1 (k + 1) = x1 (k ) − b1 y(k ) + a1x2 (k ). (3.13). y(k ) = sgn [ x1 (k )]. (3.14). 因此可得 x1 之差分: ∆. ∆x1 = x(k + 1) − x(k ) = −b1 y (k ) + a1 x2 (k ) = −b1sign( x1 ) + a1 x2 (k ). (3.15). 在此以減小量化誤差 x1 為出發點,希望其大小隨時間而漸小,首先定義二次 式 V 正比於量化誤差之能量: ∆ 1 2 V = x1 2. 由於函數 V 恆大於等於零,當 V 等於零時表示量化誤差 x1 為零,因此只要 22.
(33) 使 x1∆x1 在 x1 ≠ 0 時恆小於零,則可以使 V 為非增加之函數:. x1∆x1 = x1[−b1sign( x1 ) + a1 x2 (k )] = − x1 [b1 + a1sign( x1 ) x2 ] < 0. ∴ x2 <. b1 a1. (3.16). 因此,在(3.16)的條件下,可以保證量化誤差之能量不會增加,且可得 x1 之 差分於某一範圍內:. ∆x1 = −b1sign( x1 ) + a1 x2 (k ) ≤ b1 + a1 max( x2 ). where max( x2 ) <. b1 a1. (3.17). 同時,由於條件(3.16)可以使 x1∆x1 < 0 ( for x1 ≠ 0 ) ,也就是當 x1 (k ) > 0 時, ∆x1 (k ) < 0 ,因此使 x1 (k ) 減小,也就是 x1 (k + 1) < x1 (k ) ;同理,當 x1 (k ) < 0 時, ∆x1 (k ) > 0 ,會使 x1 (k ) 增加,則 x1 (k + 1) > x1 (k ) ,且最大變動量為(3.17),因此可. 以得知 x1 (k ) 會愈來愈靠近零,而最終被限制於 ∆x1 的最大變動範圍內: x1 ≤ (b1 + a1 max( x2 )). z 第二步:其餘狀態變數之穩定. 由式(3.1)可以得到 y 與 x1 、 x2 之關係:. y(k ) = (a1 / b1 ) x2 (k ) − (1/ b1 )∆x1 (k ) 將上式帶入(3.2)~(3.3)可以得到各狀態關係式:. 23.
(34) a1b2 b2 ⎧ ⎪ x2 (k + 1) = (1 − b ) x2 (k ) + a2 x3 (k ) + b ∆x1 1 1 ⎪ a1b3 b3 ⎪ ⎪ x3 (k + 1) = − b x2 (k ) + x3 (k ) + a3 x4 (k ) + b ∆x1 1 1 ⎪⎪ ⎨ ⎪ ab b ⎪ xn −1 (k + 1) = − 1 n −1 x2 (k ) + xn −1 (k ) + an −1 xn (k ) + n −1 ∆x1 b1 b1 ⎪ ⎪ ab b ⎪ xn (k + 1) = − 1 n x2 (k ) + xn (k ) + an r (k ) + n ∆x1 b1 b1 ⎪⎩ 由上面關係式,可以寫成系統狀態方程式:. x(k + 1) = Ax(k ) + B1r (k ) + B2 ∆x1 (k ). ⎡ − a1b2 / b1 + 1 a2 ⎢ −a b / b 1 1 3 1 ⎢ 其中, A = ⎢ − a1b4 / b1 0 ⎢ ⎢ ⎢⎣ − a1bn / b1 0. 0 a3 1 0. (3.18). 0 ⎤ ⎡0⎤ ⎡b2 / b1 ⎤ ⎥ ⎢ ⎥ ⎢b / b ⎥ ⎥ ⎢ ⎥ ⎥ = = , B2 ⎢ 3 1 ⎥ 0 , B1 ⎢0⎥ ⎢ ⎥ ⎥ an −1 ⎥ ⎢ ⎥ ⎢ ⎥ an ⎦⎥ bn / b1 ⎦⎥ ⎢ ⎢ ⎣ ⎣ 1 ⎥⎦. 由矩陣 A 可以得知,系統的特徵方程式:. b1 ( z − 1) n −1 + b2 a1 ( z − 1) n − 2 + b3a2 a1 ( z − 1) n −3. + (bn an −1. a2 a1 ). (3.19). 因為輸入 r (k ) 以及 x1 (k ) 皆為有限值,因此,只要確保系統(3.18)是穩定系 統,則可以使系統狀態皆為有限值,也就是讓式(3.19)的根落在單位圓內。此外, 由觀察可以知道,上式之特徵方程式即為系統迴圈濾波器 W 之分子,所以在設 計上只要 W 之零點落在單位圓內,以及狀態 x2 符合(3.16)則可以保證系統之穩 定。. 24.
(35) 3.3 設計範例(四階 Σ-∆ 與高通 Noise Shaping) 在此所設計的取樣頻率(Sampling Frequency)為 1499.4kKHz,即 34 倍於 CD 光碟儲存之 44.1 KHz 取樣;首先,選擇雜訊轉移函數(Noise Transfer Funciton)之 截止頻率遠高於 20kHz 音頻範圍,其函式係數如下:. NTF =. z4 − 4z3 + 6z 2 − 4z + 1 z 4 -3.3438z 3 + 4.2382z 2 -2.4088z + 0.5173. 圖 3-6、NTF 頻率響應圖 由上述之 NTF 可以求得 Σ-∆ 化簡形式中的 W ( z ) ,以及 F ( z ) ,其中 W ( z ) 之 零點皆於單位元之內:. W ( z) =. 1 − NTF 0.6562z 3 - 1.7618z 2 + 1.5912 z - 0.4827 = NTF ( z − 1) 4. F ( z) =. a4 a3a2 a1 0.6562z -1.7618z 2 + 1.5912z -0.4827 3. 25.
(36) 經過(3.7)係數比較之後,可以得到四階 Σ-∆ 的係數關係式,之後,根據穩 定性條件可決定係數 a1 = b1 − 0.1 。基於系統狀態參數的極限值可寫出限制方程 式:. a 0.4241 || x2 ||ss∞ ≈ 223.5 a1 || r ||ss∞ + a1 || x1 ||ss∞ ≤ 1 || x3 ||ss∞ ≈. 70.4a 0.069 || r ||ss∞ + || x1 ||ss∞ ≤ 1 a1a2 a1a2. a 0.0045 || x4 ||ss∞ ≈ 12.3 a1a2a3 || r ||ss∞ + a1a2a3 || x1 ||ss∞ ≤ 1. 最後由上式關係可求得如表 3-1 之系統係數及圖 3-7 的等效示意圖。3-8 顯 示輸入為 1kHz 所模擬之各狀態時域圖。 a1 = 0.5562. a2 = 0.2. a3 = 0.1. a4 = 0.0449. b1 = 0.6562. b2 = 0.3718. b3 = 0.3256. b4 = 0.2639. 表 3-1、四階 Σ-∆ 系統係數. 圖 3-7、完整四階 Σ-∆ 系統設計等效示意圖. 26.
(37) 圖 3-8、Σ-∆ 系統各階狀態變化圖. 圖 3-9、單一位元數位訊號頻譜與時域圖 圖 3-10 則為系統模擬 2.1 之 PWM 系統,其中輸入訊號採理想輸入,而輸出 訊號最快切換頻率為 44.1kHz 的 34 倍,由圖可以知道,對於 PWM 運算,即使 輸入沒有取樣的問題,但是輸出之切換精度需要相當高的頻率,否則不甚理想。. 27.
(38) 圖 3-10、PWM 數位訊號頻譜與時域圖. 28.
(39) 第四章 1.5 位元 Σ-∆ 調變機制 由圖 2-11 所示為提升小訊號放大時的效能而產生不同的調變方式,可以發 現事實上新的切換命令(2-11(b) and (c))比上傳統調變(2-11(a))多了一個零切換的 狀態。若以週期性 PWM 來產生零切換,可以循如參考文獻[12]的方法,將輸入 訊號的正負部份分開調變後產生相差。如果使用 Σ-∆ 調變,則為 1.5 位元回授 調變,也就是輸出 y[n]之狀態除了原本之 ± 1 外,多了一個 0 狀態。. 本章將基於[21] 所提出之方法,首先在 4.1 介紹 1.5 位元之變化概念,而採 用[23]的方法,於 4.2 分析說明系統的穩定度,最後由 4.3 的設計範例說明實作 上所採用的係數,並與單位元 Σ-∆ 作系統響應以及切換次數上的比較。. 4.1 1.5 位元運算概念 D 類功率放大器,是以切換式訊號,控制元件導通或截止,造成電流不同的 流向,達到功率放大的效果;其後級之示意圖如 4-1,由切換開關與喇叭所構成, 由 4-2 可以得知,當訊號 Y 用 1 位元表示時,切換開關 S1 等於 S 3 , S 2 等於 S 4 , 且此兩組為互補脈波,因此當訊號 Y 由+1 轉換到-1 時,開關動作必須先將 S1 、. S 3 作 off 動作,再將 S 2 、 S 4 作 on 動作,反之亦然,每次切換動作必使每個開關 作切換一次;而對於 1.5 位元之訊號,由於 Y 多了 0 準位,因此,當訊號由+1 轉換到 0 準位,或-1 轉換到 0 準位時,只需將其中某一開關作 off 的動作,其餘 皆維持原狀,因此,只要確保切換訊號 Y 能夠準確表示所想要的訊號,則 1.5 位 元之方法可以省下可觀的切換次數,除了減少切換損失,熱能消耗之外,對於抑 制 EMI 以及延長元件使用壽命皆有所改善。. 29.
(40) 圖 4-1、切換開關示意圖. 圖 4-2、切換訊號與開關波形關係圖. 4.1.1 1.5 位元於 Σ-∆ 之運算 在此將以單位元之設計概念依照[21],延伸為 1.5 位元之運算,確保不改變 系統追蹤訊號的運作。 單位元 Σ-∆ 的設計概念是希望量化誤差 x1 收斂,也就是 x1 ∆x1 < 0,而由 3.2. 30.
(41) 小節可以知道,原本的 1-bit 運算,是經由限制 x2 之範圍( x 2 <. b1 ),及採用 a1. y = sign( x1 ) 做為系統回授達成 x1 ∆x1 < 0 之機制,不過經由式(3.13)可以發現: x1 (k + 1) = x1 (k ) − b1 y (k ) + a1 x 2 (k ). Î ∆x1 = x1 (k + 1) − x1 (k ) = −b1 y (k ) + a1 x2 (k ) ∆x1 x1 < 0 ∀sign( x1 ) sign( x2 ) < 0 and y = 0. 因此,當 sign( x 2 ) sign( x1 ) < 0 時,不需要回授 y,系統便可達成量化誤差收 斂之機制( x1 ∆x1 < 0 ),此時則設輸出 y 為零,採用此運算可減少後級開關之切換 次數,更使雜訊被壓制於較低的水平(圖 4-3),在此將運算法整理如下表: sign( x1 ) sign( x2 ). Out. 1. 1. 1. -1. 1. 0. 1. -1. 0. -1. -1. -1. 表 4-1、1.5 位元運算 輸出-輸入 關係表. 圖 4-3、單位元與 1.5 位元系統輸出之頻譜圖. 31.
(42) 4.2 1.5 位元 Σ-∆ 之穩定度分析 4.2.1 1.5 位元系統描述. 圖 4-4、1.5 位元 Σ-∆ 架構圖 首先將圖 4-4 的系統分為兩部分,線性部分 W ( z ) 以及非線性部分如圖 4-5, 而圖 4-6 為簡單示意圖,其中系統 W ( z ) 為:. ⎧ x(k + 1) = Ax(k ) + B1r (k ) − B2 y (k ) ⎨ ⎩e(k ) = Cx(k ). (4.1). u (k ) = (CB2 ) −1 C ( A − I ) x(k ) + (CB2 ) −1 CB1r (k ). (4.2). ⎧ y (k ) = −1 for e(k ) < 0 而非線性 Q(.) 方塊的運算為:當 −1 < u (k ) < 0 時, ⎨ ⎩ y (k ) = 0 for e(k ) > 0 ⎧ y (k ) = 0 for e(k ) < 0 當 0 < u (k ) < 1 時, ⎨ ⎩ y (k ) = 1 for e(k ) > 0 可化減為,當 −1 + m ≤ u (k ) ≤ −1 + (m + 1) 時,. ⎧ −1 + m , where e(k ) < 0 y (k ) = Q{u (k )} = ⎨ ⎩−1 + (m + 1) , otherwise. 32. for m = 0 or 1. (4.3).
(43) 圖 4-5、1.5 位元 Σ-∆ 架構圖. 圖 4-6、1.5 位元 Σ-∆ 示意圖[23]. 4.2.2 1.5 位元之系統穩定性 在此首先假設系統之初始狀態為零,也就是 x(0) = e(0) = u (0) = 0 ,而後面的 步驟將逐一得到穩定系統之條件。. z 第一步:使 e(k ) 收斂且為有限值. 由式(4.1)及(4.2)可得:. e(k )[e(k + 1) − e(k )] = e(k )[CAx(k ) + CB1r (k ) − CB2 y (k ) − Cx(k )] = e(k )(CB2 )[u (k ) − y (k )] = e(k )CB2 [u (k ) − Q{u (k )}]. 33.
(44) 因此只要確保 u (k ) 的範圍不會超過 ±1 ( u (k ) ≤ 1 ),則 e(k )∆e(k ) ≤ 0 ,也就 是當 e(k ) 小於零的時候, e 會增加;當 e(k ) 大於零的時候, e 會減少,而對於初 始值 e(0) = 0 的情況,. ∵ ∆e(k ) = e( k + 1) − e(k ) = CB2 [u (k ) − Q{u (k )}] ≤ CB2 ∴ e(k ) ≤ CB2. 因此,只要確保 u (k ) ≤ 1 ,則對於初始值為零的情況,系統之 e(k ) 會被限制 於一小範圍內作震盪。 z 第二步:其餘狀態變數之穩定. 由(4.1)系統可得:. e(k + 1) = CAx(k ) + CB1r ( k ) − CB2 y ( k ). (4.4). 因此可以得到輸出 y 之等式:. y (k ) = (CB2 ) −1 CAx(k ) + (CB2 ) −1 CB1r (k ) − (CB2 ) −1 e(k + 1). (4.5). 將式(4.5)代入系統(4.1)可得:. x(k + 1) = Ax(k ) + B1r (k ) − B2 (CB2 ) −1 CAx(k ) − B2 (CB2 ) −1 CB1r ( k ) + B2 (CB2 ) −1 e( k + 1). = [ I − B2 (CB2 ) −1 C ] Ax(k ) + B2 (CB2 ) −1 e(k + 1) + [ I − B2 (CB2 ) −1 C ]B1r (k ) ∆. x(k + 1) = Ax(k ) + Be(k + 1) + [ I − B2 (CB2 ) −1 C ]B1r (k ). (4.6). 由於 e 和 r 為有限值,因此系統狀態 x 為有限值的條件為系統(4.6)是穩定 34.
(45) 的,也就是式(4.6)的特徵方程式的根皆小於 1,在此若選擇(A,B,C)為 observable. canonical form 則: ⎡0 ⎢1 ⎢ A = ⎢0 ⎢ ⎢ ⎢⎣0. ∆. W ( z) =. 0. −α n ⎤ ⎡ηβ n −1 ⎤ ⎡0⎤ ⎡σ ⎤ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢0⎥ 0 −α n −1 ⎥ ⎢ηβ n − 2 ⎥ ⎢0⎥ ⎢ ⎥ ⎥ B2 = ⎢ ⎥ C T = ⎢ ⎥ B1 = ⎢ ⎥ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ 0 −α 2 ⎥ ⎢ ηβ1 ⎥ ⎢0⎥ ⎢0⎥ ⎢⎣ η ⎥⎦ ⎢⎣1 ⎥⎦ ⎢⎣ 0 ⎥⎦ 1 −α1 ⎥⎦ 0. 0 1 0. (4.7). η ( z n −1 + β1 z n − 2 + β 2 z n −3 + + β n −1 ) E( z) = C ( zI − A) −1 B2 = Y ( z) z n + α1 z n −1 + α 2 z n − 2 + + α n. 將(4.7)代入(4.6)可得系統表示式為:. ⎡ x1 (k + 1) ⎤ ⎡0 ⎢ x (k + 1) ⎥ ⎢1 ⎢ 2 ⎥ ⎢ ⎢ ⎥ = ⎢0 ⎢ ⎥ ⎢ ⎢ xn − 2 (k + 1) ⎥ ⎢ ⎢⎣ xn −1 (k + 1) ⎥⎦ ⎢⎣0. 0 0 1 0. 0 − β n −1 ⎤ ⎡ x1 (k ) ⎤ ⎡ −α n + α1β n −1 ⎤ ⎡ β n −1 ⎤ ⎡σ ⎤ ⎢ ⎥ ⎢ ⎥ ⎥ ⎢ ⎥ ⎢0⎥ 0 − β n − 2 ⎥ ⎢ x2 (k ) ⎥ ⎢ −α n −1 + α1β n − 2 ⎥ ⎢ β n−2 ⎥ ⎢ ⎥ ⎥+⎢ ⎥ e(k + 1) + ⎢ ⎥ r (k ) ⎥⎢ ⎥ e( k ) + ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ 0 − β 2 ⎥ ⎢ xn − 2 (k ) ⎥ ⎢ −α 3 + α1β 2 ⎥ ⎢ β2 ⎥ ⎢0⎥ ⎢⎣ β1 ⎥⎦ ⎢⎣ 0 ⎥⎦ 1 − β1 ⎥⎦ ⎢⎣ xn −1 (k ) ⎥⎦ ⎢⎣ −α 2 + α1β1 ⎥⎦. 其中 xn (k + 1) = e(k + 1) ,由於上式之特徵方程式為 W(z)之分子,則希望系統 穩定之條件為 W ( z ) 之零點為穩定。. 綜合上述,此 1.5 位元系統之穩定條件為: z. 系統 W ( z ) = C ( zI − A) −1 B2 之零點在單位元之內. z. 量化器輸入 u (k ) 之範圍於 ±1 以內. 4.2.3 1.5 位元系統之輸入範圍 由於量化器輸入 u (k ) 之範圍限制,在此需求出輸入訊號之振幅範圍,確保系 統之 u (k ) 不會超出 ±1 。. 35.
(46) 由式(4.2)和(4.6):. u (k ) = (CB2 ) −1 C ( A − I ) x(k ) + (CB2 ) −1 CB1r (k ) ∆. x(k + 1) = Ax(k ) + Be(k + 1) + [ I − B2 (CB2 ) −1 C ]B1r (k ) 可得到系統:. ⎧u (k ) = (CB2 ) −1 Cx(k ) + (CB2 ) −1 CB1r (k ) ⎪ ⎨ ⎪⎩ x(k + 1) = Ax(k ) + Be(k + 1) + ( I − BC ) B1r (k ). (4.8). ⎧ A = [ I − B2 (CB2 ) −1 C ] A ⎪ ⎪ −1 ⎨ B = B2 (CB2 ) ⎪ ⎪C = C ( A − I ) ⎩. 其中. 將(4.8)取 z-Transform: X ( z ) = ( zI − A) −1 BzE ( z ) + ( zI − A) −1 ( I − BC ) B1 R( z ) U ( z ) = (CB2 ) −1 C ( zI − A) −1 BzE ( z ) +(CB2 ) −1 C ( zI − A) −1 ( I − BC ) B1 R( z ) +(CB2 ) −1 CB1 R( z ) ∵ CB1 = 0. U ( z ) = (CB2 ) −1 C ( zI − A) −1 BzE ( z )+(CB2 ) −1 C ( zI − A) −1 B1 R( z ) ∆. −1. −1. =(CB2 ) P1 ( z ) E ( z ) + (CB2 ) P2 ( z ) R( z ). 由(4.9)可知:. 36. (4.9).
(47) u (k ). ∞. = (CB2 ) −1[ ∑ P1 (k − l )e(l ) + l. ∞. ∑ P (k − i)r (i). ]. 2. i. ∞. ≤ (CB2 ) −1[∑ P1 (k − l ) e(l ) ∞ + ∑ P2 (k − i) r (i) ∞ ] l. (4.10). i. ≤ (CB2 ) −1 P2 (k ) 1 r (k ). ∞. + (CB2 ) −1 P1 (k ) 1 e(k ). ∞. 其中 P 1 表系統 P 之 l1 norm , r ∞ 表訊號 r 之峰值。 限制上式之 u (k ) ,則得輸入 r 與 e 之不等式,且基於[23]可知,較可接受的 限制條件為: (CB2 ) −1 P2 (k ). ∞. r (k ). ∞. + (CB2 ) −1 P1 (k ). ∞. e( k ). ∞. ≤1. 化減後可求得輸入範圍:. r (k ). ∞. ≤. P1 (k ) ∞ (CB2 ) e( k ) − P2 (k ) ∞ P2 (k ) ∞. ∞. =. η P2 (k ). [1 − P1 (k ) ∞ ] ∞. 其中. ( β1 − α1 ) z n −1 + ( β 2 − α 2 ) z n − 2 + + ( β n −1 − α n −1 ) z − α n P1 ( z ) = −1 ( z n −1 + β1 z n − 2 + β 2 z n −3 + + β n −1 ) P2 ( z ) =. σ ( z n −1 + β1 z n − 2 + β 2 z n −3 +. + β n − 2 z + β n −1 ). 37. (4.11).
(48) 4.3 1.5 位元 Σ-∆ 調變設計 4.3.1 設計範例. 首先選定系統轉移函數 W ( z ) ,其中 W ( z ) 之零點皆位於單位圓之內:. W ( z) =. 0.9828 s3 - 2.494 s 2 + 2.153 s - 0.6293 s 4 − 4s3 + 6s 2 − 4s + 1. 由 W ( z ) 可得系統架構,如圖 4-7:. ⎧ x(k + 1) = Ax(k ) + B1r (k ) − B2 y (k ) ⎨ ⎩e(k ) = Cx(k ) = x1. u (k ) = (CB2 ) −1 C ( A − I ) x(k ) + (CB2 ) −1 CB1r (k ) = (CB2 ) −1 C ( A − I ) x(k ) = 0.9 x2 0 ⎤ ⎡1 0.8828 0 ⎡ 0.9828 ⎤ ⎡1 ⎤ ⎡ 0 ⎤ ⎢0 ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ 0 ⎥ 1 0.4 0 ⎥ 0.5152 ⎥ T ⎢ 0 ⎥ ⎢ ⎢ ⎥ 其中 A = B2 = C = B =⎢ ⎢0 ⎢ 0.3237 ⎥ ⎢0⎥ 1 ⎢ 0 ⎥ 0 1 0.2 ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ 0 0 1 ⎦ ⎣0 ⎣ 0.1829 ⎦ ⎣0⎦ ⎣ 0.0496 ⎦. 圖 4-7、系統架構圖. 38.
(49) 可將此系統轉換為 Observable Canonical Form:. ⎡0 ⎢1 A=⎢ ⎢0 ⎢ ⎣0. 0 0 1 0. 0 −1⎤ ⎡ −0.6293⎤ ⎡0⎤ ⎡ 0.0035⎤ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ 0 ⎥ 0 4⎥ 2.1530 ⎥ T ⎢0 ⎥ ⎥ B2 = ⎢ C = B1 = ⎢ ⎢ −2.4936 ⎥ ⎢0⎥ ⎢ 0 ⎥ 0 −6 ⎥ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ 1 4⎦ ⎣ 0.9828 ⎦ ⎣1 ⎦ ⎣ 0 ⎦. 代入式(4.11)可求得 P1 (k ). P1 (k ). ∞. = 0.5916. P2 (k ) ∞ :. ∞. ; P2 (k ). ∞. = 0.2759. 則輸入訊號的振幅範圍:. r. ∞. =. η P2 (k ). [1 − P1 (k ) ∞ ] = 1.4548 ∞. 由於實現上之運算已將訊號量化為 16 位元數位訊號,其振幅範圍為 ±1 之 間,因此在此所採用之系統轉移函數 W ( z ) 於實現上不需要限制輸入訊號的振 幅,其 u (k ) 必定落在 ±1 之間。 最後基於系統狀態參數的極限值可寫出限制方程式:. a 0.62 || x2 ||ss∞ ≈ 76 a1 || r ||ss∞ + a1 || x1 ||ss∞ ≤ 1 a 0.144 || x3 ||ss∞ ≈ 35.2 a1a2 || r ||ss∞ + a1a2 || x1 ||ss∞ ≤ 1. a 0.013 || x4 ||ss∞ ≈ 8.84 a1a2a3 || r ||ss∞ + a1a2a3 || x1 ||ss∞ ≤ 1. 上式關係可求得以圖 4-5 為基礎之系統係數。4-8 顯示輸入為 1kHz 所模擬之 各狀態時域圖。圖 4-9 為輸入訊號 1kHz 的弦波,於 34 倍取樣頻率之響應。. 39.
(50) a1 = 0.8828. a 2 = 0 .4. a3 = 0.2. a4 = 0.0496. b1 = 0.9828. b2 = 0.5152. b3 = 03236. b4 = 0.1829. 表 4-1、四階 Σ-∆ 系統係數. 圖 4-8、Σ-∆1.5 運算系統各階狀態變化圖. 圖 4-9、1.5 位元數位訊號頻譜與時域圖. 40.
(51) 4.3.2 切換次數之比較. 圖 4-10 顯示不同輸入訊號情況的切換次數,(a)圖為輸入訊號 1kHz,改變輸 入振幅對切換次數的比較;(b)圖為輸入振幅為 1 而頻率漸增的情況,由觀察可 知當訊號振幅愈小,或訊號頻率愈高,運算所需的切換次數也愈多,而對於 1.5位元調變可在任意輸入訊號下,至少省下 400k 次/s 的切換動作。. 圖 4-10、1 位元與 1.5 位元切換次數-輸入訊號關係圖 (a) 切換次數-訊號振幅圖 (b)切換次數-訊號頻率圖. 41.
(52) 第五章 硬體架構與實現 要實現一個全數位化的音頻擴大器,在設計上利用 USB 作為溝通介面讀取. PC 端資料,並將訊號傳輸至以 FPGA 實現的數位 Σ-∆ 調變器,最後經由後級, 採用德儀 TAS-5121 功率放大晶片,高速切換式功率放大器提高訊號增益後輸出。 本章主要實現上述三個部分:於 5.1 介紹 USB 介面、5.2 說明 FPGA 實現 Σ -∆ 調變器、最後以 5.3 呈現功率放大器。(圖 5-1) 其中 USB 所讀出之訊號為雙聲道、16 位元、取樣頻率 44.1kHz 之音樂訊號, 而 FPGA 為實現 34 倍取樣頻率之 Σ-∆ 系統,最後的功率級以 80%以上之效率 輸出至喇叭。. 圖 5-1、全數位化音頻放大器系統方塊圖. 圖 5-2、數位式音頻放大器實體照 42.
(53) 5.1 USB 介面 USB 為 Universal Series Bus(萬用串列匯流埠)的縮寫。USB 界面使用 7-bit 的定址欄位,扣掉 USB 主機預設給第一次接上的周邊設備使用,還剩 127 個位 址可以使用,因此一部電腦最多可以連接 127 個 USB 裝置[24][25]。. 5.1.1 硬體介紹 Cypress AN2131Q USB 專用晶片(與 8051 Core 相容) 台灣長高科技公司 DMA- Cypress USB AN2131 控制單板 .符合 USB1.1 版,12Mbps 高速傳輸博定標準 .支援等時、巨量、控制和中斷四種傳輸模式 .ROM 可擴充至 32K RAM .提供偵錯與發展的環境(Keil C Compiler) .使用與 8051 Core 相容的 Cypress AN2131Q USB 專用晶片。包含 8051 與相容的 P0、P1 與 P2 週邊 port,可直接執行一般 8051 的 I/O 控制。. 圖 5-3、DMA- Cypress USB AN2131 控制單板. 43.
(54) 5.1.2 USB 實做. USB 即 Universal Series Bus,負責將雙聲道 44.1KHz、16-bit 資料由 PC 即時 輸出。此 USB 介面主要功能有二:. (1) 宣告USB硬體描述,即設定及紀錄USB裝置的各種訊息。在此,該USB 裝置屬於Audio類型,控制單板經由USB描述元在PC中宣告為可辨識的. USB Audio裝置,只要是符合USB Class規定的裝置,其驅動程式皆已包 含於作業系統中,因此不需額外撰寫其驅動程式即可直接使用該裝置。 此時,只要啟動應用程式,音樂訊號便可從PC端傳送至USB之端點暫存 區。. 等時傳輸. 第 1~9ms. 第 10ms. USB Device 收到資料 PORTB PORTA. USB Device 傳送資料. (1 Channel). 表 5-1、USB 介面輸入輸出時序. 44.
(55) (2) 依設計之FPGA傳輸協定將音訊資料經 8051 微控制器I/O埠輸出至後 級。USB介面設定之傳輸模式為等時傳輸(Isochronous Transfer),即每固 定時間內產生中斷,藉由中斷副程式判斷是否有待傳輸的資料。因此在 實作上接收資料的端點暫存區將存在一計數器(Counter)記錄目前暫存區 內的資料數,每當暫存區輸出 1-Byte資料時,計數器即減 1,用以判斷 暫存區是否為空;此外,基於等時傳輸的最小時間單位為 1ms,則對取 樣頻率為 44.1kHz的音樂訊號而言,每次需傳輸 44 或 45 筆 16-bit的資料, 加上所傳遞的為 16-bit音訊,但是 8051 為八位元單晶片,因此需要兩個 輸出埠分別輸出高位元組(High byte)與低位元組(Low byte)訊號。由表 3-1 可知,USB在每單位時間內可將PC端資料如期輸出,不致造成資料重疊 遺失的嚴重後果。. 以下大略簡述 USB 程式實作上的流程架構。圖 5-4 所示為 USB 程式流程圖, 其中主程式主要作在初始環境設定,如:設定端點暫存區、宣告 I/O 埠位置,致 能中斷等;而中斷副程式目的則在利用暫存區的資料計數器,判斷並執行資料搬 移動作。. 45.
(56) 圖 5-4、USB 介面設計流程圖. 46.
(57) 5.2 FPGA Field Programmable Gates Array,由多個邏輯單元(Logic Cell)經可程式的垂 直通道(Vertical Channel)和水平通道(Horizontal Channel)連線構成,藉以達到可程 式化數位邏輯設計。. 5.2.1 硬體介紹(Altera FLEX10K Emulation Board) ALTERA 10K-ARC240 .10K Gates .work frequency over then 30MHz .supply voltage 5V regulated to 3.3V .3.3V 的 I/O .with EPPROM. 圖 5-5、Altera FLEX10K Emulation Board. 47.
(58) 5.2.2 FPGA 實作. 此部分總共完成兩件事,首先由於 FPGA 處理 44.1 筆資料量的時間為 1ms, 但是 USB 大約只用 0.8ms 即將資料傳送完畢,如此與 FPGA 所需之 44.1KHz 數 位訊號資料速率不相配(如圖 3-3),因此設計一 FIFO(First-in First-out)緩衝器,藉 以同步化 USB 資料傳輸速度與 FPGA 資料接收速度;而第二部分則為 Σ-∆ 方 塊之實現。. 圖 5-6、USB/FPGA 資料存取時序圖 . FIFO( First In First Out )緩衝器:. 此區機制分為三部分,分別為讀出、寫入以及內部機制。其中特別狀態為, 當 FIFO 裡面沒有資料時,則 empty 準位會被拉高用以通知 FPAG 無資料待傳輸; 而當緩衝器的資料已滿時,則 full 被拉高位準告知前級 USB 已沒有空間供寫入。 圖 5-7 為所設計連接前級 USB 及後級 FPGA 之 FIFO 架構示意圖,詳細說明如下. [26]:. z 發生寫入動作時相關的接腳. wr : 由 USB 控制,當有資料傳至 Bus_In 介面時,則產生一個 pulse。 48.
(59) full : 由 FIFO 控制,當發現有寫入動作時(wr 的上升緣),則會做空間判 斷,如果還有空間,則 full=0,允許寫入;否則 full=1,資料不准寫入。. Bus_In : 負責傳輸 16-位元資料,在 wr 的下降緣時,FIFO 會依照 full 的 值決定是否要將 Bus_In 介面上的資料放到內建的 RAM 中儲存。. 圖 5-7、FIFO 架構圖 z 發生讀出動作時相關的接腳. rd : 由 Σ-∆ 控制,當需要抓取資料的時候,則產生一個 pulse。 empty : 由 FIFO 控制,當發現有讀出動作時(rd 的上升緣),則會做資料 判斷,如果還有資料未讀出,則 empty=0,允許讀出;否則 empty=1, 沒有資料會被讀出。. Bus_out : 負責傳輸 16-位元資料,在 rd 的下降緣時,FIFO 會依照 empty 的值決定是否要將 RAM 中儲存的資料送至 Bus_Out,若 empty=1,則 不做讀出資料的動作,Bus_Out 會維持原本的值(最後一次更動的值)。 49.
(60) z 內部運作機制 : 在此採用 16*16-bit 大小的暫存器,因此最多可以儲 存,16 筆資料;而內部另外宣告兩個指標,rd_ptr_count 以及. wr_ptr_count,負責紀錄讀出與寫入的位址,每當讀出一次,rd_ptr_count 則加一,寫入動作同理,圖 5-8 所示為此兩指標於特殊情況時的相對位 置。 z mute 機制 : FIFO 的外部接腳,其作用為,當 Σ-∆ 連續索取 15 次資料 都沒有要到的時候,則 mute 會被拉為 high,此時 Bus_Out 會輸出零; 因此內部會有一個負責紀錄沒有抓到資料次數的訊號 mute_count,其在. rd=1(抓資料動作)時,若發現沒有資料(empty=1)且沒資料次數未達 15 次(mute=0)則作加一的動作。. 圖 5-8、存取/寫入指標與 FIFO 狀態操作示意圖. . Σ-∆調變器於FPGA之實現:. 依據第三章設計之 Σ-∆ 穩定係數,實現 Σ-∆ 演算法,設計一 Σ-∆ 調變 器將輸入訊號調變為 1-bit 控制訊號,以 15-bit 的精確度實現於 FPGA。首先將係 數乘以 32768 ( 215 )做量化處理(Quantization),並取高位元部分(無條件捨去)後可 得表 3-2 之 16-bit 實作係數。. 50.
(61) a1 = 4731( HEX ). a 2 = 1999 ( HEX ). a3 = 0CCC( HEX ). a4 = 05C0( HEX ). b1 = 53FE ( HEX ). b2 = 2F98( HEX ). b3 = 29AE ( HEX ). b4 = 21C8( HEX ). 表 5-2、四階 Σ-∆ 調變器實作係數 實作上以 FPGA 實現該四階 Σ-∆ 調變器需要八個乘法器、四個減法器、四 個加法器和一個比較器,因此在 VHDL 程式撰寫中將上述運算元儲存為一. SDM.vhdl 檔,並以一 control 元件作為控制,如圖 5-9 架構圖,控制區與各元件 皆有一條控制線做溝通,當控制區內部計數至某特定時刻,則發出致能控制,使 被選取的元件開始運作,由於致能動作是採上升緣觸發,因此,每一次的致能, 皆使元件只做單一次運算(例:致能的元件為累加器,則作一次加法運算後,便 停止動作)。控制元件致能之順序如圖 5-10,在此僅為示意圖,且數位積分器以 累加器代替,其中省略延遲元件,首先由每一階的乘法器做乘法運算,再由減法 器,接著為累加器,個別依序作一次乘法、一次減法、一次加法,最後,當每一 階個狀態算出來之後,比較器才會運算輸出值並作為回授。. 圖 5-9、四階Σ-Δ調變器控制圖. 51.
(62) 圖 5-10、一階 Σ-∆ 調變器執行順序圖 綜合上述架構可得圖 5-11 之完整雙聲道處理器演算法之 FPGA 示意圖,其 中每一聲道中使用各自的緩衝器及演算方塊,因此輸出端為兩組獨立 2-bit 的訊 號,圖 5-12 顯示由 MAX+plusII 編譯後的結果報告檔,其中採用 10k Gates 之 FPGA 實現雙聲道四階 Σ-∆ 運算,共佔用系統的 74%。. 圖 5-11、雙聲道 Σ-∆ 調變器之 FPGA 架構圖 52.
(63) 圖 5-12、FPGA 實現之編譯結果. 5.3 功率級 FPGA 之工作電壓為 3.3v,而最大電流為 500mA,若於其輸出直接輸入至喇 叭,不但推不動喇叭,甚至造成 ALTERA 版子損壞。因此需要一電流放大器, 將 Σ-∆ 所產生之切換訊號放大,以便推動喇叭,撥放音訊,在此採用德州儀器 之 TAS-5121 功率放大晶片[27]。. 5.3.1 硬體介紹 Digital Amplifier Power Stage – TAS5121 .100-W RMS Power Into 4 Ω With Less Than 10% THD+N .80-W RMS Power Into 4 Ω With Less Than 0.2% THD+N .0.05% THD+N at 1W Into 4 Ω .36-Pin PSOP3 Package .3.3-V Digital Interfacd .Power Stage Efficiency Greater Than 90% into 4 Ω Load. 53.
(64) 圖 5-13、TAS5121 腳位圖. 5.3.2 功率級實作. 由於德州儀器(TI, Texas Instruments)出產的 TAS5121 功率放大晶片是以全橋 方式來實現其放大電路,故放大級只需要 0 ~ +V 的單一電源供應。. 對於這個單晶片功率放大器而言,總共必須提供三種直流電壓源: z. 第一為所有數位電路所需的直流電壓(Digital Voltage, D_Vdd),電壓範 圍為 3~3.6v,通常為 3.3v,其相對地為接腳 DGND. z. 第 二 為 晶 片 輸 出 端 閘 道 驅 動 電 路 (Gate Drive Circuit) 的 直 流 電 壓. G_Vdd,通常為 12v,相對地為接腳 GND z. 最後一種為提供 IC 內部的全橋式功率放大電壓 P_Vdd。其中 P_Vdd 電壓值可以在 0V ~ 32V 之間由使用者自行決定,且 P_Vdd 電壓值大小 也直接決定這個電路的輸出功率,同時也影響系統的效率,如圖 5-14、. 5-15 所示。在此所使用之 P_Vdd 為 20V,而揚聲器內阻值為 4Ω。. 54.
(65) 圖 5-14、輸出功率與 P_Vdd 關係圖. 圖 5-15、輸出功率與 Power_Efficiency 關係圖 最後要說明的是,此功率放大器為位準觸發(Level Trigger),外接電路上用 來吸收突波的電容必須充電完成始得正常操作。因此由圖 5-16 可以得知在電壓 輸入 1ms 後電容才充電完成,至此方可將 RESET 準位設為 High,讓訊號輸入; 55.
(66) 同理,訊號結束前 1ms 即必須拉低 RESET 準位至 LOW,以避免資料流失,造 成失真。上述 RESET 腳位為利用 FPGA 來控制。. 圖 5-16、功率放大器啟動程序. 56.
(67) 第六章 效能評估與比較 本章主要量測平台實際訊號,於 6.1 量測訊號級以及輸出級的單位元訊號, 並計算 Signal-to-Noise Ratio(SNR);而於 6.2 量測系統後級的功率效益。. 圖 6-1、系統訊號表示圖. 6.1 訊號雜訊比(SNR, Signal-to-Noise ratio) 6.1.1 訊號級電壓量測與 SNR 比較 首先以輸入訊號為 1K Hz 大小為 1 的情況來討論,而所計算的範圍為 20K Hz 以內,以訊號大小除以雜訊大小即為 SNR(圖 6-2~6-5)。. ⎛ signal power ⎞ SNRone −bit = 10 log ⎜ ⎟ = 44.1dB ⎝ noise power ⎠. 圖 6-2、單位元訊號級輸出電壓時域圖 57.
(68) 圖 6-3、單位元訊號級輸出電壓頻域圖 ⎛ signal power ⎞ SNR1.5−bit = 10 log ⎜ ⎟ = 48.8dB ⎝ noise power ⎠. 圖 6-4、1.5 位元訊號級輸出電壓時域圖. 圖 6-5、1.5 位元訊號級輸出電壓頻域圖. 58.
(69) 下圖所示為單位元與 1.5 位元訊號級電壓之比較,可以明顯看出,在維持訊 號大小不變的情況下,1.5 位元於頻帶內之雜訊抑制佔較大的優勢。. 圖 6-6、1.5 及單位元訊號級輸出電壓頻譜比較圖. 圖 6-7、訊號級輸出訊號 SNR 與輸入振幅關係圖. 59.
(70) 6.1.2 輸出級電壓量測與 SNR 比較. 首先同樣以輸入訊號為 1K Hz 大小為 1 的情況來討論,而所計算的範圍為. 20K Hz 以內,以訊號大小除以雜訊大小即為 SNR(圖 6-8、6-9),可以得知,經 過功率放大後的訊號並不影響其響應。. ⎛ signal power ⎞ SNRone −bit = 10 log ⎜ ⎟ = 44dB noise power ⎝ ⎠. 圖 6-8、單位元輸出級電壓頻域圖 ⎛ signal power ⎞ SNR1.5−bit = 10 log ⎜ ⎟ = 48.4dB ⎝ noise power ⎠. 圖 6-9、1.5 位元輸出級電壓頻域圖. 60.
(71) 6.2 系統功率 6.2.1 單位元輸出輸入功率. 圖 6-10、單位元系統輸入電流與電壓圖. 圖 6-11、單位元系統輸出電壓與電流圖 61.
(72) 在此以 1kHz 的弦波作為測試訊號,計算輸出與輸入功率,首先由圖 6-10 可 以得知輸入平均功率為 8.3959(Watt)。其輸出功率由 6-11 的電壓與電流圖得到為. 7.0242(Watt)。 由此可以推算出整個系統效能. Power Efficiency =. 7.0242 = 83.66 % 8.3959. 6.2.2 1.5 位元輸出輸入功率. 圖 6-12、1.5 位元系統輸入電流與電壓圖. 62.
(73) 圖 6-13、1.5 位元系統輸出電壓與電流圖 相同地,以 1kHz 的弦波作為測試訊號,計算輸出與輸入功率,由圖 6-12 可 以得知輸入平均功率為 6.0691(Watt)。其輸出功率由 6-11 的電壓與電流圖得到為. 5.1442(Watt)。 由此可以推算出整個系統效能. Power Efficiency =. 63. 5.1442 = 84.76 % 6.0691.
數據



+7





相關文件
在直流馬達控制系統中,為了減少流經馬達繞線電流及降低功率消耗等 目的,常常使用脈波寬度調變信號 (PWM)
由於較大型網路的 規劃必須考慮到資料傳 輸效率的問題,所以在 規劃時必須將網路切割 成多個子網路,稱為網 際網路。橋接器是最早
– 迷你陸橋作業(Mini Land Bridge Service, MLB) 指只利用陸橋作業的前半段,不再轉接海運。. – 微陸橋作業(Micro Land Bridge Service,
共集放大器 MATLAB 分析. CC
From Remark 3.4, there exists a minimum kernel scale σ min , such that the correspondence produced by the HD model with the kernel scale σ ≥ σ min is the same as the correspondence
接收器: 目前敲擊回音法所採用的接收 器為一種寬頻的位移接收器 其與物體表
這個開放的課程架構,可讓學校以不同 進程組織學習經歷、調節學習內容的廣
(A)憑證被廣播到所有廣域網路的路由器中(B)未採用 Frame Relay 將無法建立 WAN
