國立臺灣大學機械工程學系研究所碩士論文 指導教授 : 黃秉鈞教授
高功率LED之主動式散熱控制技術研究
A Study on Active-Cooling Control Technology of High-power LED Lighting Luminaries
研究生 : 羅逸軒 撰
中華民國九十八年六月
誌謝
本論文是受到許多人的協助下所完成的,在此,我僅以有限篇幅對這段期間 曾經給予我幫助的人致上謝意。
首先我要感謝我的父母和姊姊,家人們時常給予我最大的支持和鼓勵,沒有 他們為我加油打氣,就不會有今天的我,他們總是在背地裡默默給予我心理和生 活上的支持,使我永遠可以不用為無謂的事煩惱。
再來要感謝的是指導教授 黃秉鈞教授,感謝老師的細心指導,讓我在兩年 的研究生涯可以學到很多課本以外的知識。不論是國內外的研討會或是舉辦展覽,
大家都感受到老師對各個細節的重視,如同老師在課堂教學和指導我們做研究時 所抱持的態度。
接著要感謝研究助理吳大哥和葉大哥,因為你們的細心和充滿耐心的指導,
才能使完全沒有實作基礎的我累積不少的實作經驗。感謝整合公司,尤其是工程 師—小洪,因為有你的大力協助,本論文才得以如期完成。
另外要感謝實驗室的所有人,民聖、佳鴻、博恩、俊瑋、阿甘、志瑋等各位 學長大力的幫忙,我的研究論文才得以順利完成,感謝同窗好友阿晃、于平、佑 星及珮儀,跟你們一起學習、修課時的互相討論,真的讓我獲益良多。還有實驗 室的助理和學弟,有了你們,實驗室的氣氛也熱鬧了許多。希望大家在未來的日 子裡,都能一切順利順心,過著自己想過的生活。
I
高功率 LED 之主動式散熱控制技術研究
羅逸軒* 黃秉鈞**
國立台灣大學 機械工程學系研究所
摘要
本研究旨在開發 LED 主動式散熱技術,提供高功率 LED 在特殊高溫環境下 (高頂建築、礦坑、工廠等)散熱所需。本研究利用 DC 12V(48W)變頻壓縮機作為 主動製冷元件,配合 LED 燈具設計,將冷凝器、膨脹閥及蒸發器等元件,和燈 具硬體做結合,將 LED 照明時所產生的熱量散發至環境中。蒸發器固定於 150W LED 鋁基板上,透過銅管內冷媒循環傳遞熱量,將熱量從 150W LED 鋁基板傳 導至冷凝器。冷凝器固定於燈具外殼的內壁,熱量從冷凝器傳導至燈具外殼,最 後透過自然對流方式來散熱。另外,我們將量測到的 LED 鋁基板溫度進行回授 控制,利用壓縮機變頻控制技術改變壓縮機的轉速,達到控制 LED 鋁基板溫度 且節省壓縮機運轉耗能之目的。在 25℃的環境下,壓縮機平均耗能為 26W,可 將 LED 鋁基板溫度維持在 50℃,壓縮機的 COP 達 5.77,LED 燈泡發光效率為 85.2 lm/W;而在高溫 40℃的環境下,壓縮機平均耗能為 48W,LED 鋁基板溫度 維持在 50℃,壓縮機的 COP 達 3.13,LED 燈泡發光效率為 77 lm/W。
關鍵字:LED、主動式散熱、高溫環境
* 研究生
** 指導教授
II
A Study on Active-Cooling Control Technology of High-power LED Lighting Luminaries
Yi-Hsuan Lo* Bin-Juine Huang**
Department of Mechanical Engineering National Taiwan University
Abstract
The main objective of this study is to develop LED with active-cooling technique, designing an interior droplight, which can provide high power LED for the purpose of heat dissipation in high temperature environment (e.g. mines, factories and desert areas). This study uses DC 12V compressor as active-cooling component, with the interior droplight design, integrating the condenser, expansion valve, and evaporator into a system. The aim of applying this system is to dissipate the heat from the 150W LED into the environment. In addition, the temperature measured by the aluminum PCB is then processed for feedback control. The inverter technology is used to change the rotating speed of the compressor, to control the temperature of aluminum PCB, and to save power while the compressor is in operation. TheLED aluminum PCB is controlled at around 50oC under ambient temperature 25℃, and the average power consumption of the compressor is 26W.The COP is 5.77, and the overall LED efficacy is about 85.2 lm/W. At 40℃, the average power consumption of the compressor is 48W.The COP is 3.13, and the overall LED efficacy will be reduced to about 77 lm/W.
Keywords: LED、active-cooling、high temperature
* Graduate Student
** Advisor
III
目錄
誌謝
...Ⅰ中文摘要
...Ⅱ英文摘要
...Ⅲ目錄
...Ⅳ圖目錄
...VII表目錄
...XI第一章 緒論
...11.1 研究動機...1
1.2 研究目的...4
1.3 研究內容...5
第二章 LED照明燈具機構設計及製作
...62.1 燈具元件介紹...8
2.1.1 150W LED發光模組規格...8
2.1.2 變頻式直流壓縮機特性...9
2.2 燈具散熱模組設計...11
2.3 燈具散熱模組製作...15
2.3.1 冷凝器製作...15 IV
2.3.2 蒸發器製作...15
2.3.3 燈具主體結構製作...16
第三章 LED燈具動態系統識別
...183.1 LED燈具動態模型推導...18
3.2 系統動態模型識別...27
3.2.1 系統識別方法...27
3.2.2 實驗設計...32
3.3 系統識別結果...35
3.3.1 Gω(s)之識別結果...35
3.3.2 GA(s)之識別結果...40
3.3.3 Gs(s)之識別結果...44
第四章 控制系統設計分析與製作
...484.1 變頻控制系統設計分析...48
4.2 變頻控制系統參數分析...50
4.3 變頻控制系統硬體設計與製作...57
4.4 變頻控制系統軟體撰寫...61
4.5 系統整合測試...63
4.5.1 環境溫度對系統之影響...63
4.5.2 環境風速對系統之影響...67 V
第五章 討論與結論..
.....
...705.1 討論...70
5.2 結論...71
5.3 未來展望...72
參考文獻
...73附錄 PIC16F877A 控制器程式
...75作者簡歷
...82
VI
圖目錄
圖 1.1-1 全球 LED 市場預測圖...2
圖 1.1-2 LED 晶蕊溫度和照度關係圖...3
圖 1.1-3 LHP 散熱燈具圖...3
圖 2-1 吊燈內部冷媒循環圖...7
圖 2-2 燈具系統圖...7
圖 2.1.1-1 150W LED 發光模組...9
圖 2.1.2-1 壓縮機外觀(圖一) ...9
圖 2.1.2-2 壓縮機外觀(圖二) ...10
圖 2.2-1 燈具內部框架設計圖...,,,,,...11
圖 2.2-2 燈具外殼設計圖...12
圖 2.2-3 150W LED 吊燈設計圖(斜視) ...12
圖 2.2-4 150W LED 吊燈設計圖(下視) ...13
圖 2.2-5 冷凝器銅管管路示意圖...13
圖 2.2-6 吊燈內部元件配置圖...14
圖 2.3.1-1 冷凝器製作圖...15
圖 2.3.2-1 蒸發器製作圖...16
圖 2.3.3-1 燈具內部框架組裝圖...16 VII
圖 2.3.3-2 燈具外觀圖...17
圖 3.1-1 LED 溫度控制系統結構圖...18
圖 3.1-2 LED 燈具能量平衡圖...19
圖 3.1-3 二階系統加入左半面極點對暫態性能的影響...25
圖 3.2.1-1 150W LED 燈具系統方塊圖...27
圖 3.2.1-2 T~ =A 0、V~ =W 0之系統方塊圖...28
圖 3.2.1-3 步階輸入圖形...28
圖 3.2.1-4 T~ =A 0、V~ =W 0之步階響應系統方塊圖...29
圖 3.2.1-5 步階響應值η(t)曲線...30
圖 3.2.1-6 ω~ =0、T~ =S 0之步階響應系統方塊圖...31
圖 3.2.1-7 ω~ =0、T~ =A 0之步階響應系統方塊圖...31
圖 3.2.2-1 系統識別測試設備...32
圖 3.2.2-2 LED 鋁基板背面量測點位置...33
圖 3.2.2-3 系統識別設備圖...33
圖 3.3.1-1 壓縮機轉速由 2000rpm 上升至 2500rpm 步階響應曲線...35
圖 3.3.1-2 壓縮機轉速由 2500rpm 上升至 3000rpm 步階響應曲線...36
圖 3.3.1-3 壓縮機轉速由 3000rpm 上升至 3500rpm 步階響應曲線...36
圖 3.3.1-4 壓縮機轉速由 3500rpm 降至 3000rpm 步階響應曲線...37
圖 3.3.1-5 壓縮機轉速由 3000rpm 降至 2500rpm 步階響應曲線...37 VIII
圖 3.3.1-6 壓縮機轉速由 2500rpm 降至 2000rpm 步階響應曲線...38
圖 3.3.1-7 G~ω(s)在不同操作點下的微擾模型和平均模型之頻率響應圖...39
圖 3.3.2-1 環境溫度由 20℃上升至 30℃之步階響應曲線...40
圖 3.3.2-2 環境溫度由 30℃上升至 40℃之步階響應曲線...41
圖 3.3.2-3 環境溫度由 40℃降至 30℃之步階響應曲線...41
圖 3.3.2-4 環境溫度由 30℃降至 20℃之步階響應曲線...42
圖 3.3.2-5 G~ sA( )在不同操作點下的微擾模型和平均模型之頻率響應圖...43
圖 3.3.3-1 風量改變由無風環境至風速 1m/s 之步階響應曲線...44
圖 3.3.3-2 風量改變由風速 1m/s 至風速 2m/s 之步階響應曲線...45
圖 3.3.3-3 風量改變由風速 2m/s 至風速 1m/s 之步階響應曲線...45
圖 3.3.3-4 風量改變由風速 1m/s 至無風環境之步階響應曲線...46
圖 3.3.3-5 G~ sV( )在不同操作點下的微擾模型和平均模型之頻率響應圖...47
圖 4.1-1 加入 PI 控制器之閉迴路系統方塊圖...49
圖 4.2-1 具有飽和制動器之系統方塊圖...50
圖 4.2-2 具有反積分終結器之系統方塊圖...51
圖 4.2-3 系統模擬方塊圖...51
圖 4.2-4 KI =0.4,KP = 25 ~ 150 之模擬結果圖形...53
圖 4.2-5 KP =150,調整 KI之模擬結果圖形...54
圖 4.2-6 T~ sA( )對T~ sL( )轉移函數波德圖...55 IX
圖 4.2-7 V~ sW( )對T~ sL( )轉移函數波德圖...56
圖 4.3-1 變頻控制系統硬體方塊圖...57
圖 4.3-2 控制電壓分壓電路...58
圖 4.3-3 壓縮機轉速和控制電壓關係圖...58
圖 4.3-4 壓縮機轉速控制電路板...58
圖 4.3-5 溫度感測器電路...59
圖 4.3-6 控制器電路圖...60
圖 4.3-7 系統電路完成圖...60
圖 4.4-1 積分近似圖...61
圖 4.4-2 變頻控制器軟體流程圖...62
圖 4.5.1-1 壓縮機未啟動狀態下之 LED 鋁基板溫度變化情形(環境溫度 23℃)...63
圖 4.5.1-2 系統性能測試(環境溫度 25℃) ...64
圖 4.5.1-3 系統性能測試(環境溫度 40℃)...65
圖4.5.1-4 系統性能測試(環境溫度20℃升至30℃)...66
圖 4.5.2-1 不同環境風力情況下系統性能測試(環境溫度 25℃)...67
圖 4.5.2-2 高溫陣風情況下系統性能測試(風速 1.5m/s)...68
X
XI
表目錄
表 2.1.1-1 150W LED 工研院測試資料(一) ...8
表 2.1.1-2 150W LED 工研院測試資料(二) ...8
表 2.1.2-1 KSDC006LJCKXY 壓縮機規格...10
表 3.3.1-1 不同壓縮機轉速操作點下的識別結果(周溫 40℃) ....38
表 3.3.2-1 不同環境溫度操作點下的識別結果(3500 rpm) ...42
表 3.3.3-1 不同環境風速操作點下的識別結果(3500rpm) ...45
表 4.2-1 KI=0.4 改變 KP之步階響應模擬結果...52
表 4.2-2 KP=150 改變 KI=0.4~0.9 之步階響應模擬結果...53
表 4.5.2-1 不同環境條件下之冷凝器與空氣間熱阻和壓縮機 COP 值...69
第一章 緒論
1.1 研究動機
由於受氣候暖化和工業發展的影響,台灣地區用電量逐年攀升。近 5 年來,
全台灣用電量去年已經達到 1816 億度,平均成長率達 4.8%,其中又以工業用電 的成長比率最高。如果單從工業用電來看,平均成長率高達 5%到 6%。再以台 灣照明用電使用情況分析,可分為五大應用區塊,包括辦公室(34%)、家庭(26%)、
商場(14%)、工業(18%)和道路(8%)。根據估計,一般商業大樓的照明用電約佔大 樓總用電量的 30~40%,因照明不像空調一般具有季節性的差異,因此用電需 求量大。照明用電量佔全國總用電量的 15~20%(包含工業、商業、住宅部門),
是不可小覷的電力消費。因此,只要在照明耗電方面節省 30%,就能降低全國 約 5%的電力消費量,數量驚人。
近年來,新興的固態光源:發光二極體(LED-Light Emitting Diode),是被看 好在未來十年內,成為替代傳統照明器具的一大潛力商品。此種半導體光源與傳 統白熾鎢絲燈泡及日光燈相比,具有體積小、發熱量低、耗電量小、壽命長、反 應速度快、環保、輕薄短小等優點。LED 和相同亮度的傳統燈泡相比,耗電量 可以節省 50~80%。
以 LED 的市場來看,2006 年全球 LED 市場為 61.7 億美元,預計 2011 年成 長至 125 億美元,平均每年市場成長率達 17.1%,速度驚人。因此 LED 可說是 未來一大潛力商品[圖 1.1-1]。
而就技術層面來看,以目前單一顆高亮度 LED 的發光效率來看,已超過 100 lm/W,但照明設備必須使用多顆高亮度 LED 做不同的排列組合,以及搭配輔助 光學才能達到照明的效果。密集的組合多顆高功率 LED 會產生熱源集中的問
1
題,當操作溫度超過晶蕊上限溫度,將會造成晶蕊燒毀或使光衰問題更加嚴重。
因此需透過必要的散熱機制來解決熱的問題,LED 溫度和照度關係圖如圖 1.1-2。
傳統的 LED 散熱方式採用強制對流的設計概念:利用散熱鰭片加裝一個風 扇,來達成散熱的效果。但是採用風扇的散熱裝置,會衍生幾個問題:(1)風扇 故障;(2)消耗能量;(3)振動與噪音問題等等,其中,噪音問題更是令人無法忍 受的一大問題點。
另外,使用被動式散熱元件,如 LHP(Loop heat pipe) [1],如圖 1.1-3 所示。
LHP 雖不需依賴外界輸入能量,可達到省電的目的,但在高溫、密閉且通風不 良的特殊環境下(如沙漠環境、高頂建築、礦坑、工廠等),被動散熱方式無法順 利散熱。
針對高溫等特殊環境的情況下,本研究係利用主動式散熱技術,來解決高功 率 LED 發光時所衍生出來的散熱問題,使 LED 照明的應用場合範圍擴大,並可 防止 LED 晶蕊溫度過高所導致的照度衰減和壽命降低等問題產生。
圖 1.1-1 全球 LED 市場預測圖 (資料來源:工研院)
2
圖 1.1-2 LED 晶蕊溫度和照度關係圖
圖 1.1-3 LHP 散熱燈具圖
3
1.2 研究目的
本研究目的為開發一具有主動式散熱機制之 LED 燈具,利用小型直流變頻 式壓縮機來達到製冷目的,專門提供高功率 LED 照明燈具在高溫、密閉且通風 不良的特殊環境下散熱所需。透過銅管良好的可繞性、且具遠距離傳熱的特點,
利用壓縮機驅動冷媒流動,可以使 LED 發光時產生的熱能均勻地分佈在燈罩 上,最後透過環境空氣自然對流的方式將熱量帶走。
由於採主動式散熱設計,因此我們也須利用壓縮機變頻控制技術改變壓縮機 的轉速[2],以達到省電之目的。另外,控制器的設計目的除了有效控制 LED 鋁 基板溫度之外,還必須考慮當環境溫度和風力變化時,減少外界干擾所產生的影 響。
4
5
1.3 研究內容
本研究旨在開發 LED 主動式散熱技術,尤其針對其系統抗環境干擾等問 題,主要探討利用直流變頻式壓縮機作為主動製冷元件,達到省電和提升散熱效 率的目標。研究內容如下:
(1)LED 照明燈具機構設計及製作。
(2)LED 燈具動態系統識別。
(3)控制系統設計分析與製作。
(4)系統整合測試。
第二章 LED 照明燈具機構設計及製作
由於 LED 燈具系統為主動式散熱設計,壓縮機的製冷能力主要影響高效率 LED 燈具的散熱量。然而,良好的燈具機構設計,不僅使燈具體積更為縮小,
同時固定單位面積下,燈具散熱量提升,使壓縮機不需長時間維持高轉速運轉,
達到節省耗電量的目的。另外,燈具系統內有製冷元件,系統整體重量較傳統燈 具增加,燈具系統的懸吊重心配置和避免壓縮機運作時產生的震動噪音等問題,
也是燈具機構設計時所必須考慮到的重點。
主動式散熱燈具動作原理為:壓縮機負責冷媒(R-134a)流動及壓縮的功能,
低壓低溫的氣態冷媒經壓縮機加壓後,會變成高壓高溫的氣體狀態。高壓高溫的 氣態冷媒流進冷凝器,藉由冷凝器(固定於燈具殼壁)和空氣自然對流作熱交換,
達到冷媒散熱目的,這時冷媒會變成高壓中溫的液體狀態。高壓中溫的液態冷媒 會經由膨脹閥的阻流,膨脹為低壓低溫的飽和狀態(氣態+液態)。低壓低溫的飽 和狀態冷媒流進蒸發器,藉由蒸發器與 150W LED 鋁基板做熱交換,達到冷媒 吸熱(對 150W LED 鋁基板降溫)目的,冷媒會回復到低壓低溫的氣體狀態。如此 以達到 LED 散熱的目的。吊燈內部冷媒循環圖如圖 2-1,燈具系統圖如圖 2-2 所 示。
6
圖 2-1 吊燈內部冷媒循環圖
圖 2-2 燈具系統圖
7
2.1 燈具元件介紹
主動式散熱LED燈具包含二大組件:(1)發光組件-150W LED發光模組;(2) 主動式散熱系統,接下來將介紹各組件的特性。
2.1.1 150W LED 發光模組規格
本研究所使用的燈具為總瓦數150W LED燈具,是由單顆1.2W的LED所組成 的發光模組。表2.1.1-1和表2.1.1-2為本研究之150W LED在工研院的性能測試結 果。
表 2.1.1-1 150W LED 工研院測試資料(一) 電壓
(V)
電流 (A)
瓦數 (W)
總流明數 (lm)
發光效率 (lm/W)
50%光分佈角 90%光分佈角
45.2 3.3 149.16 8836 50.9 52.6° 71.1°
表 2.1.1-2 150W LED 工研院測試資料(二)
中央照度 1m 2m 3m 4m 5m 6m 7m 8m (Lux) 4200 1050 467 263 168 117 86 66 發光模組為經由模組化的設計,可因應的不同的燈具設計。模組化的設計也 可使燈具具有防水、導熱、高透光及簡易拆卸的功能要求,發光模組外觀如圖 2.1.1-1。
本研究所使用的 150W LED 燈具[718YG07W01V3.0-N32SL-ez1000],發光模 組採用單顆 1W LED [14(串聯)×9(並聯)],並且為了讓亮度輸出集中,且發光模 組小型化,因此於面積 210mm×110mm 裝配了 126 顆 LED 燈泡,輸出功率可達 150W。
8
圖 2.1.1-1 150W LED 發光模組
2.1.2 變頻式直流壓縮機特性
高功率 LED 在發光的同時,會產生高熱量。如果無法適時的將熱量有效的 導出,LED 長時間運作在高溫的情況下,將會對 LED 的壽命及效能造成很大的 影響。
本研究使用東元公司出產之 KSDC006LJCKXY 直流變頻式壓縮機,其排氣 容積為 0.6c.c/rev,最大耗電功率為 47 瓦。壓縮機轉速可由 0rpm 至 4200rpm。
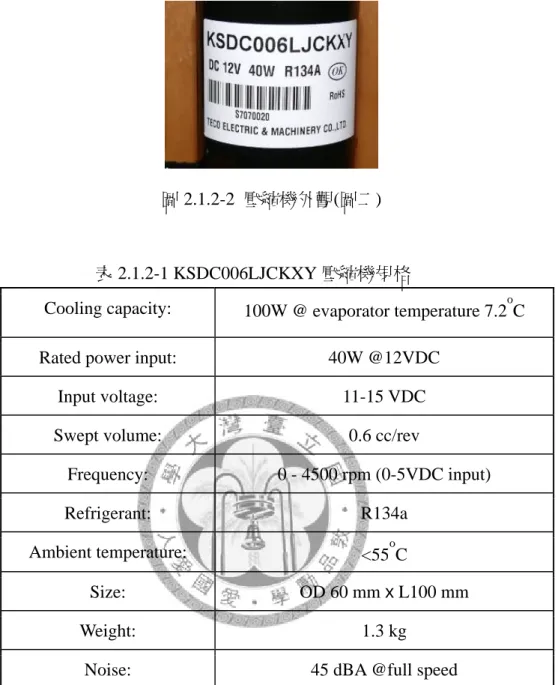
壓縮機外觀如圖 2.1.2-1 和圖 2.1.2-2 所示。壓縮機性能規格如表 2.1.2-1。
圖 2.1.2-1 壓縮機外觀(圖一)
9
圖 2.1.2-2 壓縮機外觀(圖二)
表 2.1.2-1 KSDC006LJCKXY 壓縮機規格
Cooling capacity: 100W @ evaporator temperature 7.2oC Rated power input: 40W @12VDC
Input voltage: 11-15 VDC Swept volume: 0.6 cc/rev
Frequency: 0 - 4500 rpm (0-5VDC input)
Refrigerant: R134a
Ambient temperature: <55oC
Size: OD 60 mm x L100 mm
Weight: 1.3 kg
Noise: 45 dBA @full speed
10
2.2 燈具散熱模組設計
在燈具硬體設計部分,燈具外殼為鋁材質,可提供良好的導熱性質及減輕整 體重量。另外,為增加燈具外殼的散熱面積,在固定的體積條件下,設計為圓柱 形,其側面面積可較方柱形側面面積大幅增加。但圓柱型的設計提高了製作及加 工的難度。在散熱面積和加工製作等各方面因素考量之下,我們決定將燈具外殼 設計為正八角柱以滿足散熱和加工製作等需求。
燈具硬體部份主要由 150W LED 發光模組、內部框架及燈具外殼等三大部 分組合而成。內部框架為由十二支方形空心鋁柱相互焊接而成的長方體,尺寸如 下:長為 443 毫米,寬為 248 毫米,高為 391 毫米,配合與燈殼連接的鋁柱,主 要設計目的為支撐吊燈整體重量並固定各部分燈具元件,燈具內部框架設計圖如 圖 2.2-1 所示。
LED 發光模組
圖 2.2-1 燈具內部框架設計圖
燈具外殼為八角柱形,採用對半式設計,不僅易於機器加工製作,在日後的 維修保養上也較為方便。150W LED 發光模組位於內部框架下方,使 LED 所發
11
出的光線不會被燈具所遮蔽,燈具外殼設計圖如圖 2.2-2 所示。
冷凝管連結器
圖 2.2-2 燈具外殼設計圖
燈具尺寸對角線長為 542 毫米,高度為 594 毫米,燈具外殼提供之總散熱面 積為 0.732m2,大約和 11.74 張 A4 尺寸相等。吊燈設計圖如圖 2.2-3 和圖 2.2-4 所示,冷凝器銅管管路示意圖如圖 2.2-5,吊燈內部元件配置圖如圖 2.2-6 所示。
圖 2.2-3 150W LED 吊燈設計圖(斜視)
12
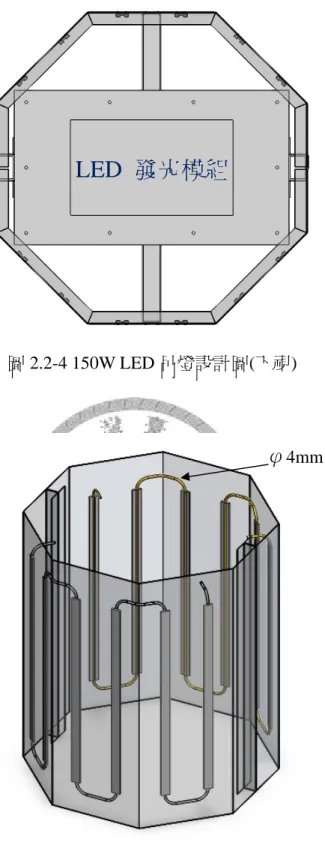
圖 2.2-4 150W LED 吊燈設計圖(下視)
φ4mm 銅管
LED 發光模組
圖 2.2-5 冷凝器銅管管路示意圖
13
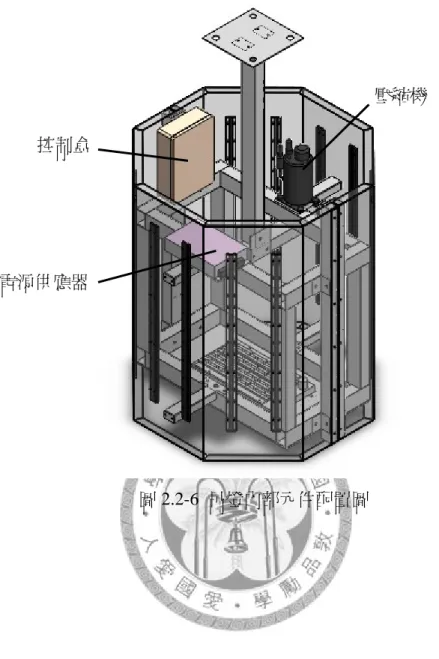
電源供應器
壓縮機 控制盒
圖 2.2-6 吊燈內部元件配置圖
14
2.3 燈具散熱模組製作
2.3.1 冷凝器製作
由於冷凝器必須固定於燈具外殼的內壁,才能將熱量從冷凝器傳導至燈具外 殼,最後透過環境中自然對流方式來散熱。首先將冷凝器的銅管固定於連結器的 溝槽裡,再將連結器固定在燈具外殼上,接觸面皆塗上導熱膏,以避免接面間隙 中存在空氣影響導熱效率。燈具外殼每一面有二個連結器,每個長度為 450 毫 米,冷凝器照片如圖 2.3.1-1 所示。
連結器
ψ4mm 銅管
圖 2.3.1-1 冷凝器製作圖
2.3.2 蒸發器製作
蒸發器固定於 150W LED 鋁基板上,才能將熱量透過冷媒循環,從 150W LED 鋁基板傳導至冷凝器。我們將蒸發器的銅管固定於四個連結器的溝槽裡,
再將連結器固定在 150W LED 鋁基板上,每個連結器長度為 200 毫米,蒸發器 照片如圖 2.3.2-1 所示。
15
圖 2.3.2-1 蒸發器製作圖
2.3.3 燈具主體結構製作
燈具內部框架外觀如圖 2.3.3-1。燈具外觀如圖 2.3.3-2 所示。
圖 2.3.3-1 燈具內部框架組裝圖
16
17
圖 2.3.3-2 燈具外觀圖
第三章 LED 照明燈具動態系統識別
3.1 LED 燈具動態模型推導
針對LED鋁基板溫度之控制系統設計需求,如圖3.1-1所示,須先識別LED 照明燈具之動態系統模型。本節先利用能量平衡的觀念,對系統各部進行能量平 衡的推導,見圖3.1-2,再建構出系統狀態空間模型(State-Space Model),進而推 導出動態系統模型[5]。
圖3.1-1 LED溫度控制系統結構圖
18
圖3.1-2 LED 燈具能量平衡圖
1. 對冷凝器做能量平衡可得:
MCCC C I CS (3.1-1) 其中 MC:冷凝器質量
CC:冷凝器比熱
TC:冷凝器(包含銅管及冷凝管連結器部分)溫度
I:冷凝器淨熱流入量(壓縮機和冷凝器之間的熱傳遞量)
CS:冷凝器傳遞至燈具外殼的熱量 TS:燈具外殼溫度
19 冷凝器至燈具外殼的熱傳出量 CS 如下式:
CS C P S (3.1-2) 其中假設冷凝管連結器溫度 P和冷凝器溫度TC相同,因此(3.1-2)可改寫為:
CS C C S (3.1-3)
冷凝器直接傳遞至環境的熱量太小,可忽略不計。
2. 對蒸發器做能量平衡可得:
MECE E LE AE O (3.1-4) 其中 ME:蒸發器質量
CE:蒸發器比熱 TE:蒸發器溫度
LE:LED 傳遞至蒸發器的熱量 AE:環境傳遞至蒸發器的熱量
O:壓縮機所產生的製冷量
QO =COP×W (3.1-5) 其中COP為性能係數,主要受到壓縮機轉速ω和環境溫度TA影響,W為壓縮機 輸入功率。
LED鋁基板 遞至蒸發
LE L L E (3.1-6) 傳 器的熱量 LE 如下式:
環 傳遞 發器的熱
AE A
境 至蒸 量 AE 如下式:
AAE A E (3.1-7) 3. 對 LED 鋁基板做能量平衡:
MLCL L L LA LE (3.1-8) 其中ML:LED 鋁基板質量
CL:LED 鋁基板比熱 :LED 鋁基板溫度
20
TL
L:LED 鋁基板吸收 LED 的熱量
LA:LED 鋁基板傳遞至環境的熱量 LE:LED 鋁基板傳遞至蒸發器的熱量 LED 鋁基板吸收 LED 的熱量 L如下式:
L L× j L (3.1-9)
其中 L為熱傳係數,和LED 鋁基板材質、面積等有關。 j 為LED 之晶蕊溫
L D 度TL有關,因此可以假設成正比關係:
度,和 E 鋁基板溫
j A Kj × TL A (3.1-10) 其中 j為比例係數。
LED鋁基板傳遞至環境的熱量 LA 如下式:
LA AALA L A (3.1-11) LED 鋁基板傳遞至蒸發器的熱量 LE 如(3.1-6)所示。
將上述之平衡方程式(3.1-1)、(3.1-4)和(3.1-8)整理如下:
I (3.1-12)
21
MCCC C CS
MECE E LE AE O (3.1-13)
MLCL L L LA LE (3.1-14) 由於熱傳現象大多為非線性系統,為了方便分析,將上述模型線性化,對方 程式中各變量取線性微擾:
(3.1-15)
C , C C ,
S S (3.1-16)
S , ,
(3.1-17)
E , E E ,
L (3.1-18)
L , L ,
A , A A , (3.1-19) (3.1-20)
I , I I ,
O , O O , (3.1-21)
L , L L , (3.1-22) 其中 C 、 S 、 E 、 L 、 A 、 I 、 O 、 L 為各變量之 平衡狀態,滿足(3.1- 3)~(32 .1-25):
(3.1-23)
I C C S 0
(3.1-24)
L L E AAAE A E O 0
L j L A A L AALA L A L L E 0 (3.1-25) 將(3.1-15)至(3.1-25)代入(3.1-12)、(3.1-13)、(3.1-14)中,整理可得線性微擾方 程式如式(3.1-2 )~ (3.1- 8) 6 2 :
MCCC C I C C S (3.1-26) MECE E
22
L L E A AE A E O
MLCL L
(3.1-27)
A
L j L A A L AALA L A L L E
(3.1-28) 因變量 I、 O皆受到壓縮機轉速ω 影響,而燈具外殼溫度 S主要受到環境風
,因此假設 速VW所影響
(3.1-29)
I I
O O (3.1-30)
S W W (3.1-31) 其中 I、 O、 W為比例常數。
將(3.1-29)、(3.1-30)、(3.1-31)分別代入(3.1-26)~(3.1-28)中,改寫 (3.1-26)~(3.1-2 ),可得(3.1-32)~(3.1-34)式:8
MCCC C I C C W W (3.1-32)
MECE E L L E A E A E O
MLCL L
AA (3.1-33)
L j L A A L AALA L A L L E
23
(3.1-34) 得到了線性微擾模型,可建立出狀態空間模型,如式(3.1-35)、(3.1-36)所示:
(3.1-36) (3.1-35)
其中各參數如式(3.1-37)~(3.1-42)所示:
CE (3.1-37)
L
C
C C 0 0
0 L AAAE
E E
L E E
0 L
L L
LKj‐1 AALA L L L
(3.1-38)
B
I C C
KW C
C C 0
O
E E 0 AAAE
E E
0 0 ‐KLKj KL AALA
L L
(3.1-39)
W
A
(3.1-40)
L (3.1-41) 0 0 1 (3.1-42) 根據上述狀態空間模型,可利用G(s) = C(sI − A)-1 B 推導出系統線性微擾模型
,如式(3.1-4 )3 所示:
ω V A
= I[dh+g(s-e)]
C C△
O[h(s-a)+bg]
E E△
W C[dh+g(s-e)]
C C△ AACA[h(s-a)+bg]
E E△
AALA[(s-a)(s-e) bd]
L L△
(3.1-43)
令(3.1-38)式中,A (3.1-44)
3 s
△=s s2
+(-aei (3.1-45)
式(3.1-43)中,
)
~(( )
~ )≣
~ (
s ω
s s T
Gω L 為壓縮機轉速的微擾輸入量對LED 鋁基板溫度 的微擾輸出量之線性微擾轉移函數;
)
~~(( ) )≣
~ (
s U
s s T
G
V L
V 為環境風速的微擾輸入量對
LED 鋁基板溫度的微擾輸出量之線性微擾轉移函數;
)
~(( )
~ )≣
~ (
s U
s s T
G
A L
A 為環境溫度
的微擾輸入量對LED 鋁基板溫度的微擾輸出量之線性微擾轉移函數。以上 LED 燈具動態模型理論為三階系統,對系統時域特性,如時間常數、上升時間、安定 時間、峰值時間、超越量百分比等公式,僅定義於一階或二階無零點系統。因此 假設三階系統,即二階系統中加入一極點,如式(3.1-46)所示:
) ω s 2 )(s σ (s
G(s) ω 2
2
n 2 n
r
n
+ +
= +
ζω (3.1-46) 則其單位步階輸入之響應為:
) 2
)(
) (
( 2 2
2
n n r
n
s s
s s s
Y σ ζω ω
ω
+ +
= +
2 2 2
4 2 2 3
1
) 1 ( ) (
) 1 ( )
(
ζ ω
ζω
ζ ω
ζω
σ + + ⋅ −
−
⋅
⋅ + + + ⋅
+ +
=
n n
n n
r s
K s
K s
K s
K (3.1-47)
若ζ <1,則
) 1 sin(
) 1 cos(
) ( )
( 2 4 2
3 2
1 u t K e t e t K t K t
K t
Y r n n n
s + −σ + −ζω ⋅ ⋅ ω −ζ + ⋅ ω −ζ
⋅
=
(A)當σ 稍大於r ζωn,則e-σrt與e-ζωnt大小相近 (B)當σ 遠大於r ζωn,則e-σrt<<e-ζωnt
(C)當σ →∞,則r e-σrt→0,故其系統響應則幾乎為二階系統。
上述三種極點分佈位置的系統響應曲線圖如圖3.1-3所示。
24
圖3.1-3 二階系統加入左半面極點對暫態性能的影響
由圖3.1-3可知,二階系統若在複數平面之左半平面加入一左半面極點對暫態 性能的主要影響是增加上升時間tr,減少最大超越量 o,而安定時間(settling time) 幾乎不改變。若新加入的極點遠離原來兩極點之位置,則其系統響應特性與原來 二階系統響應特性相近;一般而言,若第三極點之值為原來二階系統極點之值的 五倍以上,則此三階系統即可降階為二階系統。
M
若二階系統對步階輸入之響應為 ,當在複數平面加入一零點 ,則
加入零點之後的系統響應為
) (s
Y (s+a)
) ( ' s Y
) ( )
( )
( ) ( ) (
' s s a Y s s Y s a Y s
Y = + ⋅ = ⋅ + ⋅ (3.1-48)
25
(a)當a值很小時, 為對原來系統響應微分,故系統響應之 超越量 將會增加。
) (s
sY Y' s( )
(b)當a值很大時,則系統響應 主要為 ,因此其響應近似原系統輸 出響應乘上比例係數a 。
) ( ' s
Y aY(s)
由以上可知,二階系統若加入一零點,當零點位置越遠離虛軸,則系統輸出 響應越近似原來二階系統響應。
在控制器的設計方面,將閉迴路主極點移至滿足暫態性能規格的極點位置上,
其餘的閉迴路極點盡量遠離主極點,這樣即能順利地達到閉迴路暫態性能的控 制。
26
3.2 系統動態模型識別
3.2.1 系統識別方法
本研究中的受控系統為150W LED燈具,系統中唯一動件是47W直流變頻壓 縮機,由3.1小節得知系統有三個輸入為壓縮機製冷量(QO)、大氣溫度(TA)及環境 風速(VW),系統輸出為LED鋁基板溫度(TL ),因系統輸入、輸出間存在著偶合關 係,所以輸入系統之三種變量(QO 、TA 、VW )均會影響輸出之LED鋁基板溫度(TL )。
壓縮機制冷量(QO )主要受壓縮機轉速(ω)所影響,越高的壓縮機轉速,製冷量越 大,為了實驗方便,改以 I I (s)取代原先壓縮機製冷量微擾 O O
(s),其中 I、 O均為常數。燈具外殼溫度(TS )主要易受到環境風速(VW)所影響。
系統方塊圖如圖3.2.1-1所示。
圖3.2.1-1 150W LED 燈具系統方塊圖
為了求出各個轉移函數,使用隔離法,針對其中一個轉移函數做識別時,將 另兩個輸入對系統輸出的影響隔離開,化為三個單輸入單輸出系統,再分別對 Gω(s)、GA(s)、GV (s)做系統識別[10]。
27
識別的方法是利用步階響應,其作法是在當系統處在穩態操作時給予一步階 輸入,此步階可為正或負,觀察系統步階響應,由圖3.2.1-1可知系統輸出 L如式
(3.2.1 1- )所示:
L ‧ ω A ‧ A W ‧ V (3.2.1-1) 假設環境溫度無變化 A 0 ,且燈具外殼溫度不受外界風力所影響 W 0 , 式(3.2.1-1)可簡化為:
L ‧ ω (3.2.1-2) 系統被簡化為一單輸入單輸出系統,如圖(3.2.1-2)所示:
圖3.2.1-2 A 0、 W 0之系統方塊圖 單輸入單輸出系統轉移函數 ω(s)如式(3.2.1-3)所示:
Gω s = TL(s)
ω(s) (3.2.1-3) 當系統在穩態操作時給序固定大小的步階輸入做為測試訊號,設輸入的步階 訊號 ω t =A us(t) ,其中A為步階大小值,us (t)為單位步階函數,步階輸入圖形 如圖3.2.1-3所示:
圖3.2.1-3 步階輸入圖形 重新定義系統輸入及輸出項:
uω t At us t (3.2.1-4)
28
yω(t)= L(t) (3.2.1-5)
系統轉移函數可寫為式(3.2.1-6),且系統方塊圖如圖(3.2.1-4)。
ω ω
ω (3.2.1-6)
圖3.2.1-4 A 0、 W 0之步階響應系統方塊圖 由於 ω 為單位步階函數,可以(3.2.1-6)式改寫為:
ω . ω (3.2.1-7) 假設 ω 之轉移函數如式(3.3.1-8),其中係數 1、a 、 …2 及 0、b 、 、1
… 均為未知之常係數:
a a3 an b b2
b3 bm
)
~ (( )
~ ) 1
( 3
3 2 2 1
3 3 2 2 1 0
s U
s Y s
a s
a s a s a
s b s
b s b s b s b
G n
n m m
ω
ω =− ω
+ + + + +
+ + + +
= +
L
L (3.2.1-8)
使用Rake’s 分析法,經由時域的步階響應資料,即可推得 、 、 … 及 、 、 、 … 。
a1 a2 a3 an
b0 b1 b2 b3 bm 首先定義η(t):
) ( ) ( ) (
)
~( )
( A u t
T t T t u A
t t T
s L L
s L
⋅
≡ −
= ⋅
η (3.2.1-9) 由終值定理及式(3.2.1-9),
0
0
0 0 ~( ) lim ( )
lim ) (
lim t s Y s s G s b
K ≡t = S ⋅ = S ⋅ =
→
→
∞
→ η ω (3.2.1-10) 如圖(3.2.1-5)所示:
29
圖3.2.1-5 步階響應值η(t)曲線 定義η1(t)為:
[
η τ τ η t ≡∫
∞ K − d0 0
1( ) ( )
]
(3.2.1-11) 上式取拉氏轉換,並將式(3.2.1-7)代入得:
[ ] [ ]
⎥⎦⎤= ⎢⎣⎡ − ⎥⎦⎤⎢⎣⎡ −
⎥ =
⎦
⎢ ⎤
⎣
⎡ −
= L
∫
∞ K d s Ks Y s s Ks G sst
L 1 ( )
)
~ ( ) 1
( )
( 0 0
0 0 1
ω ω
τ τ η
η (3.2.1-12)
將η1(t)代入終值定理,
( )
0 0 1 1 0 1 11 0 1
) 1 (
lim
lim b a b k a b
s s G s K s s t
K t s = − = −
⎥⎦⎤
⎢⎣⎡ −
⋅
=
≡ →∞ →
η ω (3.2.1-13)
對於n 個極點系統,重覆推導步驟,可得K2、K3…Kn。
( ) ( )
⎪⎪⎪
⎭
⎪⎪
⎪
⎬
⎫
⎪⎪
⎪
⎩
⎪⎪
⎪
⎨
⎧
=
− +
− +
− +
−
=
− +
= +
−
=
−
−
− n n
n n
n n
nb K a K a K a K
K a K a K b
K a K b
K b
0 1 2
2 1
1
2 2 0 1 1 2
1 1 0 1
0 0
1
1 L
M
(3.2.1-14)
其中
30
31
]
∫ [
∞
−
− −
≡
0
1
1 ( dtt)
K
Kn n ηn (3.2.1-15)
所以只要知道微擾模型Gω(s)之極點與零點數目,透過步階響應的輸出曲線,
便可列出(3.2.1-14)之聯立方程式,進而求得H(s) 之所有係數,此法即為Rake’s 分 析法,同理,識別轉移函數GA(s)時,令ω~(s)=0、 ,且 , 定義
0 )
~ (s =
VW ~( ) ( )
t u B t
TA = ⋅ A
) (
)
~( )
~(
t u B
t t T
u
s A
A = ⋅ 、
) (
)
~( )
~(
t u B
t t T
y
s L
A = ⋅ ,可推得式(3.2.1-16),方塊圖如圖(3.2.1-6) 所示。
A . A (3.2.1-16)
圖3.2.1-6 ω~ =0、V~ =W 0之步階響應系統方塊圖
識別轉移函數GV(s) 時,令ω~(s)=0、T~A(s)=0,且V~W(t)=C⋅uV(t),定義
) (
)
~ ( )
~ (
t u C
t t V
u
s W
V = ⋅ 、
) (
~ ) ) (
~ (
u C
t t T
y
s L
V =− ⋅
t ,可推得式(3.3.1-17),方塊圖如圖(3.2.1-7)所 示。
V . V (3.2.1-17)
圖3.2.1-7 ω~ =0、T~ =A 0之步階響應系統方塊圖
本研究中所識別出來的系統參數,會隨著操作點的不同而改變,故針對單一 穩態操作點所識別出來的線性微擾模型,無法代表整個系統模型。因此,需取所 有個別穩態操作點的平均模型,足以代表整個系統的動態模型。
3.2.2 實驗設計
將燈具放置在一自製的溫控箱內,如圖3.2.2-1,利用加熱器來調整溫控箱內 的溫度變化,可將箱內溫度控制於20 ~ 40oC(±2oC)。由於環控箱內存在溫度分層 現象,利用風扇製造微小風量來破壞溫度分層。箱內於不同高度溫度值有所差異,
因此取圖3.2.2-1中四個溫度量測點的平均值為環境溫度值TA。
LED鋁基板背面量測點如圖3.2.2-2所示,共五個量測點,取其平均值做為 LED均溫TLED,實驗設備如圖3.2.2-3所示。
風扇
加熱器
溫度量測點 溫度量測點
圖3.2.2-1 系統識別測試設備
32
圖3.2.2-2 LED鋁基板背面量測點位置
圖3.2.2-3 系統識別設備圖
33
(1)G~ω(s)識別:
識別轉速對LED 鋁基板溫度模型 時,壓縮機轉速微擾量控制為500rpm,
自低轉速2000rpm 開始,至高轉速 3500rpm,模擬輸入正步階訊號時,觀察系統 輸出的響應曲線,再由高轉速3500rpm 降至低轉速 2000rpm,模擬輸入負步階訊 號時,觀察LED 鋁基板溫度的輸出變化。
(s) G~ω
(2) ~ ( )識別 s GA
識別 時,固定壓縮機轉速在3500rpm,實驗環境溫度控制在 20℃至 40
℃之間,環境溫度微擾量控制為10℃,自低溫 20℃開始,至高溫 40℃,模擬輸 入正步階訊號時,觀察系統輸出的響應曲線,再由高溫40℃降至低溫 20℃,模 擬輸入負步階訊號時,觀察系統輸出的響應曲線。
)
~ ( s GA
(3) ~ ( )識別 s GV
識別 時,固定壓縮機轉速在3500rpm,實驗環境溫度控制在 25℃±1℃
之誤差範圍內,改變風速大小,每1m/s 為一單位步階微擾量。由無風環境逐漸 增加風速至2m/s,模擬輸入正步階訊號時,觀察系統輸出的響應曲線,再由風 速2m/s 降至無風干擾,模擬輸入負步階訊號時,觀察系統輸出的響應曲線。
)
~ ( s GV
34
3.3 系統識別結果
3.3.1 G ~
ω(s)
之識別結果
由系統輸出的步階響應曲線變化,利用Rake’s 分析法分析,可以找出系統 轉移函數。由於從低頻到高頻,相位圖由0°趨近於-180°,可以判別出轉移函數的 分母比分子多二階,大小圖大於轉角頻率1x10-1的直線斜率為-40dB/decade,因 此G~ω(s)可採用二階動態模型近似。
圖3.3.1-1 至圖 3.3.1-6 為系統在不同壓縮機轉速操作點之下的步階響應曲線 圖,表3.3.1-1 為系統在不同壓縮機轉速操作點下的識別結果。
圖3.3.1-1 壓縮機轉速由2000rpm上升至2500rpm步階響應曲線
35
圖3.3.1-2 壓縮機轉速由2500rpm上升至3000rpm步階響應曲線
圖3.3.1-3 壓縮機轉速由3000rpm上升至3500rpm步階響應曲線
36
圖3.3.1-4 壓縮機轉速由3500rpm降至3000rpm步階響應曲線
圖3.3.1-5 壓縮機轉速由3000rpm降至2500rpm步階響應曲線
37
圖3.3.1-6 壓縮機轉速由2500rpm降至2000rpm步階響應曲線 表3.3.1-1 不同壓縮機轉速操作點下的識別結果
操作點 壓縮機轉速(rpm) P1 P2 k
1 2000~2500 -0.000993 -0.279 8.6e-7 2 2500~3000 -0.00106 -0.249 9.2e-7 3 3000~3500 -0.00118 -0.24 8.3e-7 4 3500~3000 -0.00128 -0.189 8.8e-7 5 3000~2500 -0.000642 -0.41 6.3e-7 6 2500~2000 -0.000781 -0.33 6.1e-7
平均 -0.001 -0.283 8.94e-7
在環境溫度40度的不同壓縮機轉速操作點下所得到的識別結果如表3.3.1-1,
P1和P2為 轉移函數的極點,k為 轉移函數的增益常數。 動態模型 轉移函數識別結果列出如下:
(s) G~ω
(s) G~ω
(s) G~ω
) 4 8 . 2 ( 283 . 0 s
7 - 8.94e
~
2 + + −
= s e
(s)
Gω (3.3.1-1) 不同操作點所得到的識別模型與平均模型頻率響應結果如圖3.3.1-7,平均模 型與識別模型大小值相差不超過6db,且相位接近,以平均模型代表整個授控系 統。而在式(3.3.1-1)中,平均模型的極點在左半平面,因此為穩定系統,且為極
38