行政院國家科學委員會專題研究計畫 期末報告
智慧型週期振動吸振器(PVA)之分析與設計(第 2 年)
計 畫 類 別 : 個別型
計 畫 編 號 : NSC 99-2221-E-131-044-MY2
執 行 期 間 : 100 年 08 月 01 日至 101 年 10 月 31 日 執 行 單 位 : 明志科技大學機械工程系
計 畫 主 持 人 : 黃世欽
計畫參與人員: 碩士班研究生-兼任助理人員:林兆偉 碩士班研究生-兼任助理人員:洪瑋廷 碩士班研究生-兼任助理人員:王品昌 博士後研究:林高安
報 告 附 件 : 出席國際會議研究心得報告及發表論文
公 開 資 訊 : 本計畫涉及專利或其他智慧財產權,1 年後可公開查詢
中 華 民 國 101 年 11 月 15 日
中 文 摘 要 : 本計畫以壓電材料作為力電轉換媒介,研發一智慧型 (可自 動調頻)的週期振動吸振器,此吸振器係由前期計畫所研發的 PVA(兩根懸臂樑與彈簧所組成)貼覆數片壓電材料所構成,
PVA 中的兩個懸臂樑各貼覆兩片壓電材料,分別作為感測器 與致動器之用,形成兩根智慧型的壓電樑。當週期負荷頻率 改變時,壓電感測器因正壓電效應之影響產生一交流電訊 號,藉此訊號,控制器可精準判斷負荷頻率,進而施予壓電 致動器一相對應之電壓,透過致動器使懸臂樑因內應力效應 而改變其固有頻率,進而可微調 PVA 的基礎頻率,達到吸收 週期負荷的目的。
智慧型週期振動吸振器係以前期計畫的 PVA 為藍圖,因 此自動調頻的關鍵技術首重壓電樑的自動調頻能力,有鑑於 此,吾人首先建立可自動調頻壓電樑之模型,續將壓電材料 之力電轉換效應加入能量式中,運用模態展開法將能量式予 以離散化,結合壓電致動器之彎矩-電壓關係式,推導出可自 動調頻壓電樑之運動方程式,並以實驗驗證此壓電樑調頻的 準確性。在模擬方面,吾人分析壓電材料於不同貼覆位置、
厚度、長度及電壓對壓電樑在調頻的影響。最後,將調頻所 需的對應電壓建立成一資料庫,作為微調 PVA 基礎頻率的依 據,達成系統週期響應衰減之目標。
中文關鍵詞: 振動吸振器,壓電樑、週期振動吸振器、振能捕捉。
英 文 摘 要 : In this project, the author built up an analytic model for periodic vibration absorber (PVA) and
conducted the analysis, design, prototype and finally experimental verification. The trait of a PVA is it absorbs not only the fundamental frequency component of a periodic excitation but also the higher
multiples. The PVAis composed of a dual-beam connected in between an element, which could be a piece of VEM orPZT. Making use of the vantages of beam`s multi-frequency as well as the connector`s parameters such as stiffness, damping and location, it is applicable to design a PVA in a very economic, efficient way. It is believed to be valuable for engineering applications. This research begins with the modeling of passive PVA via the structure
synthesis method developed by the author. The optimal algorithm is then employed to search for the
solutions of design variables. The sensitivity of
variables is then investigated afterwards. The
results are used to design adjustable PVA. Then, the piezoelectric shunt damping (PSD) is incorporated with the designed dual-beam PVA to form the adaptive, or even more, the intelligent PVA.
英文關鍵詞: Dynamic vibration absorber, periodic vibration
absorber, DVA, PZT beam, vibration energy harvesting.
1
行政院國家科學委員會補助專題研究計畫 ■ 成 果 報 告
□期中進度報告
智慧型週期振動吸振器(PVA)之分析與設計
計畫類別: ■ 個別型計畫 □ 整合型計畫
計畫編號:NSC 99- 2221 - E - 131 - 044-MY2
執行期間:
100年
8 月 1 日至 101年
10 月 31 日計畫主持人:黃 世 欽 共同主持人:
計畫參與人員: 林高安、王品昌、洪瑋廷、林兆偉
成果報告類型(依經費核定清單規定繳交):□精簡報告 ■ 完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
執行單位:明志科技大學
中 華 民 國
101 年 10 月 31 日2
目 錄
摘要
31. 文獻回顧與研究動機
32. 研究方法
62.1 壓電效應與本構方程式 6
2.2 壓電樑之能量式與運動方程式 9
3. 參數分析
133.1 壓電感測器貼覆位置之影響 14
3.2 壓電致動器貼覆位置之影響 14
3.3 電壓對壓電樑頻率之影響 15
3.4 壓電致動器長度對調頻之影響 16
3.5 壓電致動器厚度對調頻之影響 17
4. 實驗驗證
175. 智慧型 PVA 18
6. 結論
20References
21國科會補助專題研究計畫成果報告自評表 22
3
智慧型週期振動吸振器(PVA)之分析與設計
摘要
本計畫以壓電材料作為力電轉換媒介,擬研發一智慧型 (可自動調頻)的週期振動吸 振器,此吸振器係由前期計畫所研發的 PVA(兩根懸臂樑與彈簧所組成)貼覆數片壓電材料 所構成,PVA 中的兩個懸臂樑各貼覆兩片壓電材料,分別作為感測器與致動器之用,形成 兩根智慧型的壓電樑。當週期負荷頻率改變時,壓電感測器因正壓電效應之影響產生一交 流電訊號,藉此訊號,控制器可精準判斷負荷頻率,進而施予壓電致動器一相對應之電壓,
透過致動器使懸臂樑因內應力效應而改變其固有頻率,進而可微調 PVA 的基礎頻率,達到 吸收週期負荷的目的。
智慧型週期振動吸振器係以前期計畫的 PVA 為藍圖,因此自動調頻的關鍵技術首重 壓電樑的自動調頻能力,有鑑於此,吾人首先建立可自動調頻壓電樑之模型,續將壓電材 料之力電轉換效應加入能量式中,運用模態展開法將能量式予以離散化,結合壓電致動器 之彎矩-電壓關係式,推導出可自動調頻壓電樑之運動方程式,並以實驗驗證此壓電樑調頻 的準確性。在模擬方面,吾人分析壓電材料於不同貼覆位置、厚度、長度及電壓對壓電樑 在調頻的影響。最後,將調頻所需的對應電壓建立成一資料庫,作為微調 PVA 基礎頻率的 依據,達成系統週期響應衰減之目標。
關鍵字: PVA、壓電效應、週期響應 1. 文獻回顧與研究動機
科技發展日新月異且一日千里,機械振動問題一直是工業界所關心的議題,然而機械 振動現象對機器運轉是難以避免之問題,所以為了得到更高精度之機械元件,減振往往是 首要的工作。為了解決機械振動之問題,已有許多吸振器之相關研究針對減振提出具體的 方法,而吸振器大致上可分為被動式(passive)及主動式(active)兩種。
被動式吸振器之研究最早可見於 1956 年,學者 Den Hartog[1]提出單自由度無阻尼系統
(undamped primary system)動態吸振器(Dynamic Vibration Absorber,DVA)之理論,其 系統模型如圖 1 所示,將系統運動方程式予以無因次化,並提出建議之最佳頻率比。
圖 1: Hartog[1]研究之無阻尼動態吸振器模型
1980 年,Thompson[2]沿用 Den Hartog 的方法,經由頻率軌跡法(frequency locus)對
Den Hartog 建立模型並提出另一個最佳之阻尼比。Lewis[3]則將 Den Hartog 的傳統動態吸
4
振器之設計方式推廣到多自由度的系統上,Lewis 證明在 N 個自由度的系統中,其頻譜圖 上必定存在 2N-2 個定點,並可求得傳統動態吸振器之最佳頻率比及阻尼比。1974 年 Snowdon[4]將傳統動態吸振器中之阻尼器再串聯一個彈簧元件,成為彈簧-彈簧-阻尼器三元 件之動態吸振器,相較於傳統動態吸振器,此設計可獲得較佳的吸振效果,如圖 2 所示。
Brock[5]將Den Hartog提出動態吸振器模型,其方式為移除彈簧元件、吸振器質塊只透過單 阻尼器連接於主系統質塊上之Lanchester阻尼器。爾後於1979年,Bapat[6]針對Brock之模型 提出最佳阻尼比之建議。2001年Ren[7]以及2005年Liu和Liu[8]依據傳統被動式吸振器發展 出兩種模型,並對其進行比較與討論,發現地勾式吸振器比傳統吸振器更具備較佳的寬頻 吸振效果。
圖 2: Snowdon[4]研究之三元件動態吸振器
在多頻抑振方面,Sun 等人[9]比較 SSA 吸振器、雙質塊吸振器與傳統吸振器等三種吸 振器的減振效果。從文獻中的描述可知在藉由參數最佳化過程後,雙質塊吸振器可達到與 SSA 吸振器相似的吸振效果,且減振能力優於傳統的單質塊吸振器。Hill 與 Snyder[10]則設 計一款不同於文獻[9]的雙質塊吸振器,該吸振器由基座左右各兩根長桿連接一個質塊所組 成,外型類似一啞鈴裝置。兩位學者同時考慮該吸振器的彎振與扭振兩種振動行為,經由 適度調整桿件的長度與質塊的重量,可獲得吸振器的前六個固有頻率呈現兩兩一組的寬頻 吸振器效果,等同掛載三組針對不同頻寬的寬頻吸振器,且此三組頻率具倍頻的型式,可 達成吸收週期負荷的能力。
圖 3: Sun 等人[9]設計的雙質塊吸振器示意圖
在 2006 年,Wang 與 Cheng [11]設計並加工一單樑的截面,其截面厚度根據精密的理 論計算,經過 CNC 加工可呈現一不規則厚度的型態,促使加工後的不規則厚度樑之前三個 固有頻率呈現倍頻的趨勢,獲得良好減振的效果。此法的困難度在於截面厚度的理論估算 需要精密確實且後續的加工亦要縝密,方能達到所需的效果。
結構減振的方式大多數可區分為被動式(passive)及主動式(active)兩種,其中被動 式泛指在主系統添加阻尼(damping)與吸振器(absorber)等方法減振,而主動式則是配 合感測器(sensor)及致動器(actuator)並選用適當的控制法則進行減振,故許多學者以 壓電材料之力電轉換媒介特性進行主動式減振研究。
M K
x1
x2
C
(d)
m2
k2
m1
k1
x3
C1 C2
5
1990 年 Dosch 和 Inman[12]將壓電材料置於一個封閉的迴路系統中,同時具有感測及致 動的元件功能,利用速率反饋控制(Rate Feedback Control Law)及正向位置反饋法(Positive Position Feedback Law)改善懸臂樑的振動。2004 年 Sodano 等人[13]以具壓電覆層之懸臂 樑為模型,如圖 4 所示,運用能量法推導力電耦合之運動方程式。
圖4: 文獻[13]採用的壓電懸臂樑之示意圖
黃志仁[14]採用主動控制的觀念,對一複合壓電三明治樑進行模型建立與理論推導,再 加入適當的電壓找出其壓電三明治樑結構整體之位移,最後利用限元素法搭配開迴路回授 設計方式,作為抑制此結構之振動,架構如圖 5 所示。
圖 5: 懸臂壓電複合層樑回授控制示意圖
2006年Wu等人[15]利用雙層壓電懸臂樑,建立一獨立能量擷取系統,將上層壓電片當 作致動器,利用電流輸入調整樑之共振頻率,下層壓電片則為感測器,主要負責振能擷取,
並將部分回收電能提供給致動器作為調頻之用,且系統內建一環境頻率感應器,為致動器 調頻之依據,其可調頻範圍約為3Hz,如圖6所示。
圖 6: 文獻[15]之可調頻機構模組
Challa等人[16-17]建立具磁鐵掛載於自由端之懸臂樑,藉由調整兩懸臂樑距離來改變系 統間的磁場效應,達到可調頻之理想目的,其可調頻範圍約為系統自然頻率的0.3至1.4倍,
實驗架構如圖7所示。
6
圖 7: Challa[16-17]研究之可調頻機構模組 2.研究方法
2.1 壓電效應與本構方程式
壓電效應(piezoelectricity effect)係一種機械能與電能之間的互相轉移現象,早在西元 1880 年居里兄弟就發現了壓電效應,發現在某一類晶體中施加一壓力會有電性的產生。他 們研究了施壓方向與電場強度間的關係及預測某類晶體具有壓電效應。經由實驗發現具有 壓電性的材料如:閃鋅礦(zinc blende) 、鈉氯酸鹽(sodium chlorate) 、電氣石(tourmaline)、
石英(quartz)、酒石酸(tartaric acid)、蔗糖(cane suger)、方硼石(boracite)、異極礦
(calamine)、黃晶(topaz)及若歇爾鹽(Rochelle salt)。這些晶體都是具有非晶方性
(anisotropic)的結構,而晶方性(isotropic)材料是不會產生壓電性的。
在非晶方性晶體中,施加一外力使晶體變形,則晶格中電荷的移動所造成晶體內局部 性不均勻電荷分布,而產生出一電位移。電荷的位移是由於晶體內部所有離子的移動,或 因為原子軌道上電子分佈的變形而引起離子偏極化所造成,這些電荷位移現象在所有材料 中都存在,但要具有壓電效應,則必須能在材料每單位體積中造成有效淨電雙極矩變化,
但是否能有這種變化,則由晶格結構之對稱性而定。
具壓電效應的材料除了天然的晶體,如石英、電氣石、羅德鹽等材料以外,還能以人 工的方式製造,如氧化鋅、聚合物、陶瓷材料、複合材料等。其中陶瓷材料因為製造容易、
可製成任何形狀、且其特性可隨組成做多樣性的變化等優點,目前已經成為壓電元件的主 流。一般而言,壓電陶瓷材料具有體積小、響應快速、位移量小、消耗功率低等特色。但 也有一些使用上的限制,例如材質易脆等。雖然可以承受較大的正向壓力,但是當它承受 不均勻的力量時,也很容易造成材料的破壞。
由於壓電材料具有遲滯效應,使力電耦合效應為一非線性現象,且會隨著輸入電壓的 升高而變得明顯,故在選擇壓電材料時,工作電壓將會是一個重要考慮的因素,一方面可 以查看工作電壓是否在遲滯曲線的線性區內,另一方面可以避免電壓過大而破壞材料。
壓電效應其作用必須同時包括正壓電效應及逆壓電效應兩種,分別描述如下:
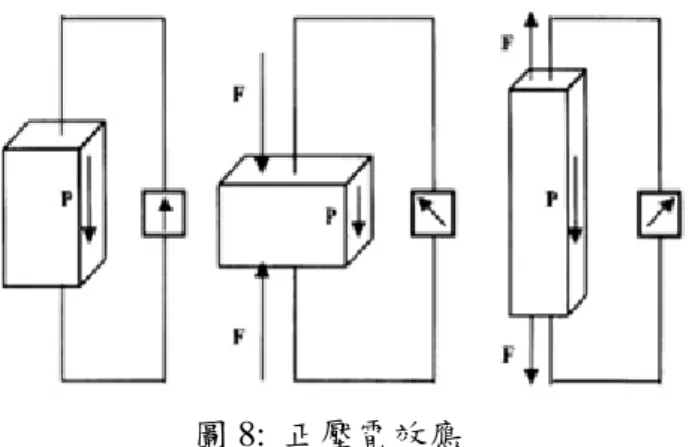
I. 正壓電效應(Direct Piezoelectric Effect)
壓電材料經由極化處理後,其內部有許多單位晶胞的電偶極矩共同排列而得到極化強 度,使得在壓電材料的一端出現正束縛電荷,另一端則出現負束縛電荷。當陶瓷晶體上沿 極化方向施一力量 F,壓電材料將出現壓縮變形,此應變使得正、負束縛電荷距離縮短,
改變了電偶極長度並減弱極化強度,故壓縮會產生較小的極化值,致使電極面上能因感應
而被束縛的電荷變少,進而產生出過多的電荷(電壓的產生),若兩端以迴路相接,有一
部份束縛在電極面上來自外界的自由電荷將被釋放而產生電子流。在力量 F 去除後,又重
新充電,此種機械能轉變成電能的現象,稱為正壓電效應,如圖 8 所示。
7
圖 8: 正壓電效應 II. 逆壓電效應(Converse Piezoelectric Effect)
當材料受到一外部電壓,使兩端的電荷密度增加,晶胞中負離子被拉到晶體的一端,
而正離子則被拉到晶體得另一端,導致晶體的尺寸改變。若在壓電材料加上一與極化方向 相同的電場,極化強度增強,壓電材料沿極化方向伸長變形,若是在壓電材料上加一與極 化方向相反的電場,極化強度減弱。當輸入電場為交流電時,物體的形變方向會隨著電場 的正、負半週做收縮與膨脹的交互變換,而當交流電場的頻率等於材料本身的自然共振頻 率時,其形變的幅度達到最大。此種電能轉變成機械能的現象,稱為逆壓電效應,如圖 9 所示。
圖 9: 逆壓電效應
壓電陶瓷為一多晶的材料,在被燒結成型後,內部晶體電偶極矩方向呈隨機排列,如
圖 10(a)所示,因材料在各方向的電偶極矩總和為零,而不具有壓電性。為了使其具有壓 電性,必須經由高壓電場(約 3kV/mm)進行極化處理,使晶體中的電偶極矩朝外加電場 方向作規則排列,如圖 10(b)所示。當極化電場除去後,電偶極矩仍然保持在同一方向,
而產生永久性的極化,並具有壓電性。
(a)未極化 (b)高壓極化處理 圖 10: 壓電陶瓷的極化處理
壓電材料本構方程式表示壓電材料力電耦合的關係,因壓電材料具有遲滯效應,故其
力電耦合關係並非線性,但在外加電場不要過大的情況下,其力電耦合關係均可視為線性,
並以本構方程式表示。一般而言,壓電材料的機電能量轉換包含了機械量與介電量兩部份,
8
所牽扯到的變數有四個,其中兩個為機械量,即為應力 T 與應變 S,其餘兩個為介電量,
即電場 E 與電位移 D;當選擇的因變數與自變數不同時,壓電材料之本構方程式就有不同 的表示型態,一般常用的有以下四種。
⎪⎩
⎪ ⎨
⎧
+
=
+
⇒ =
−
j T ij q iq i
j pj q E pq p
E T
d D
E d T s S type
d ε
(1)
⎪⎩
⎪ ⎨
⎧
+
=
−
⇒ =
−
j S ij q iq i
j pj q E pq p
E S
e D
E e S c T type
e ε
(2)
⎪⎩
⎪ ⎨
⎧
+
−
=
−
⇒ =
−
j T ij q iq i
j pj q D pq p
D T
g E
D g T s S type
g β
(3)
⎪⎩
⎪ ⎨
⎧
+
−
=
−
⇒ =
−
j S ij q iq i
j pj q D pq p
D S
h D
D h S c T type
h β
(4)
其中
Sp
:應變場(strain)
Tp
:應力場(stress)
D :電位移(electric displacement) i
E :電場(electric field) i D
cpq
、
cEpq:勁度矩陣(stiffness matrix)
D
spq
、
sEpq:柔度矩陣(compliance matrix)
S
ε 、
ijε :介電常數矩陣(dielectric constant matrix)
ijTS
β 、
ijβ :反介電常數矩陣(impermittivity constant matrix)
ijTdpj
:壓電電荷-應變轉換常數(piezoelectric charge-strain constant)
epj
:壓電電荷-應力轉換常數(piezoelectric charge-stress constant)
gpj
:壓電電壓-應變轉換常數(piezoelectric voltage-strain constant)
hpj
:壓電電壓-應力轉換常數(piezoelectric voltage-stress constant)
張量上標註表示:
D:固定電位移 E:固定電場 S:固定應變 T:固定應力 張量下標註表示:
p,q =1 ~ 6;i,j =1 ~ 3 表示張量在各位置上的分量,其中的對應關係依據 IEEE 定義,如 表 1 所列。
表 1: IEEE 標準下標對應表
i,j p,q 11 1 22 2 33 3 23 或 32 4
31 或 13 5
12 或 21 6
9
2.2 壓電樑之能量式與運動方程式
本計畫所發展之自動調頻壓電樑係由一懸臂樑上下各貼覆單片壓電材料(PZT)所組 成,如圖 11 所示。吾人假設部份覆蓋壓電材料與中間金屬樑為緊密結合,故沒有相對位移 產生。首先忽略壓電材料之力電耦合效應,以懸臂樑模態為假設模態之基底,用於推導自 動調頻壓電樑之能量式展開。
圖 11: 自動調頻壓電樑之示意圖 自動調頻壓電樑之能量式如下:
( )
20
1 2
L
B B B
T
=
bρ h∫
z& +
w dx& (5)
( ) ( )
2 4
1 3
2 2
1 1
2 2
L L
p p p p p
L L
T
=
bρ h∫
z& +
w dx& +
bρ h∫
z& +
w dx& (6)
( )
22
2 0
1 , 2
L
B B B
w x t
U E I dx
x
⎛ ∂ ⎞
= ∫ ⎜ ⎜ ⎝ ∂ ⎟ ⎟ ⎠ (7)
1
p 2 x x z z
v
U = ∫T S −D E dx
(8)
其中下標 B 為樑的符號、P 為壓電材料的符號,而
E、
I、 ρ 、
b與
h則分別是楊氏模 數、面積慣性矩、密度、寬度與厚度。
D為電位移的符號;
E為電場的符號;
S為應變的 符號;
T為應力的符號;
v為體積。
本計畫以懸臂樑為基本結構,故採用懸臂樑之自然模態為假設模態,此模態符合懸臂 樑邊界條件,亦具有正交性,如下式所示
( ) cos cosh cos cosh (sin sinh )
sin sinh
i i
i i i i i
i i
L L
x x x x x
L L
β β
φ β β β β
β β
= − − + −
+
(9)
2 14 B B i i
B B
b h E I β
= ⎜ ⎛
ρ ω⎞ ⎟
⎝ ⎠
(10)
其中
ωi為頻率方程式之解,即樑之第 i 個自然頻率。
尤拉樑之變形是以彎曲為主,在此選擇應變
S及電場
E為自變數,應力
T與電位移
D為因變數,故挑選 e-type 之壓電本構方程式進行方程式推導。本壓電樑之電極分別分佈於 壓電覆蓋層中,與變形方向垂直,故以
e 的形式來推導方程式,其壓電材料之本構方程式31如下
1 11 1 13 3
T
=
c SE−
e E(11)
3 31 1 33 3
D =e S +
ε
SE(12)
將(12)式改寫成:
10
33
3 31 1
3 S
D e S
E ε
= − (13)
續將(13)式代入(11)式改寫成
33
3 31 1
1 11 1 13
E
S
D e S T c S e
ε
= − ⋅ − (14)
利用尤拉-柏努利樑之應變
w u zx
= − ∂
∂ 及側向位移關係式
2 ( )2
, w x t
S u z
x x
∂ ∂
= = −
∂ ∂
代回(12)式
可得到
( )
33
2
3 31 2 3
, S
w x t
D e z E
x
ε
⎛ ∂ ⎞
= ⎜⎜⎝− ∂ ⎟⎟⎠+
(15)
因壓電材料內部不存在自由電子,其自由電子只有分佈於上下電極層,故電位移
D 與壓電3材料厚度無關,因此將(12)式直接對 z 軸積分,並代入(15)式
( )
33
2 2 2 2
3 31 2 3
2 2 2
,
B B B
p p p
B B B
h h h
h h h
S
h h h
w x t
D dz e z dz E dz
x ε
+ + +
⎛ ∂ ⎞
= ⎜ ⎜ ⎝ − ∂ ⎟ ⎟ ⎠ +
∫ ∫ ∫ (16)
積分後結合
E= −∇V1( )t可獲得
( )( ) 33 ( )
2
2
31 2 1
3
1 , 2
S
B p p
p
w x t
e h h h V t
D x
h
∂
ε− + +
= ∂ (17)
復將
1 1 1 3 3p 2
v
U = ∫T S −D E dv
加入側向位移關係式,並與(14)式及(17)式結合成
( )
33 33
2
3 31 1 3 31 1
11 1 13 2 3
1 , 2
E
p S S
v
w x t
D e S D e S
U c S e z D dv
ε x ε
⎛ − ⎞ ⎛ ∂ ⎞ ⎛ − ⎞
= ∫ ⎜ ⎜ ⎝ − ⋅ ⎟ ⎟ ⎠ ⎜ ⎜ ⎝ − ∂ ⎟ ⎟ ⎠ − ⎜ ⎜ ⎝ ⎟ ⎟ ⎠ (18)
再將(17)式代入(18)式可得
( )
( )
( )2
33 33
1
2 2
3 3 2 2
2 2
31 31 2
11 2 2
, ,
1 1
2 3 2 2 4
L
E B B
p S p S B p p
p L
w x t w x t
e h h e
U b c h h h h
x h x
ε ε
⎧ ⎛ ⎞ ⎡ ⎤⎛∂ ⎞ ⎛∂ ⎞
⎪ ⎛ ⎞ ⎛ ⎞
= ∫⎨⎪⎩ ⎜⎜⎝ + ⎟ ⎢⎟⎠⎢⎣⎜⎝ + ⎟ ⎜⎠ ⎝− ⎟ ⎜⎠ ⎥⎜⎥⎝⎦ ∂ ⎟⎟⎠ − + ⎜⎜⎝ ∂ ⎟⎟⎠
( )
( )
2( )
33( )
231 1 2 1
,
SB p
p
w x t
e h h V t V t dx
x h
ε
⎫
⎛ ∂ ⎞ ⎪
+ + ⎜ ⎜ ⎝ ∂ ⎟ ⎟ ⎠ − ⎬ ⎪ ⎭
(19)
假設模態法(Assumed-mode method)是一種將連續系統予以離散化經常使用的方法。
它的基本原理是假設系統的位移函數可用一組容許函數(admissible function)為假設模態 乘以時間相關之廣義座標函數(generalized coordinates)的線性函數組合。廣義座標函數決 定與其相乘模態之參與量,故又稱為模態參與因子(participation factor)。使用假設模態法 時,系統之位移函數所用的假設模態必須是容許函數,一般可以是多項式、三角函數、
Bessel’s function、Legendre polynomial,也可以為系統簡化後的特徵函數。壓電懸臂樑之位 移函數為
( ) ( ) ( )
1
,
n
i i
w x t
η φ
t x=
=∑
(20)
11
其中
n為假設模態所取之項數,
φi( )x為懸臂樑第 i 個假設模態,
η( )t為其相對之模態參
與因子或稱為廣義坐標。
將(20)式代入(5)至(8)式中,使系統離散化,故將自動調頻壓電樑之能量式改寫成
( ) ( ) 2
0 1
1 2
L n
B B B i
i
T b
ρ
h zη
tφ
x dx=
⎡ ⎛ ⎞⎤
= ⎢ +⎜ ⎟⎥
⎝ ⎠
⎣ ∑ ⎦
∫ & &
(21)
( ) ( ) ( ) ( )
2 4
1 3
2 2
1 1
1 1
2 2
L n L n
p p p i p p i
i i
L L
T bρ h z η φt x dx bρ h z η φt x dx
= =
⎡ ⎛ ⎞ ⎤ ⎡ ⎛ ⎞ ⎤
= ∫ ⎢ ⎣ & + ⎜ ⎝ ∑ & ⎟ ⎠ ⎥ ⎦ + ∫ ⎢ ⎣ & + ⎜ ⎝ ∑ & ⎟ ⎠ ⎥ ⎦
(22)
( ) 2 ( ) 2
2 0 1
1 2
L n
i
B B B
i
U E I t x dx
x η φ
=
⎛ ∂ ⎞
=
∫
⎜⎜⎝∑
∂ ⎟⎟⎠(23)
( ) ( ) ( )
2
33 33
1
3 3 2 2
2 2
31 31 2
11 2
1
1 1
2 3 2 2 4
L n
E B B i
p S p S B p p
i p
L
e h h x e
U b c h t h h h
x h
η φ
ε = ε
⎧ ⎛ ⎞ ⎡ ⎤ ⎛ ∂ ⎞
⎪ ⎛ ⎞ ⎛ ⎞
=
∫
⎨⎪⎩ ⎜⎜⎝ + ⎟ ⎢⎟⎠⎢⎣⎜⎝ + ⎟⎠ −⎜⎝ ⎟ ⎜⎠ ⎥ ⎜⎥ ⎝⎦∑
∂ ⎟⎟⎠ − +( )
2( )
2 2 31( ) 1( ) ( )
2( )
2 33 1( )
21 1
n n S
i i
B p
i i p
x x
t e h h V t t V t dx
x x h
φ φ ε
η η
= =
⎛ ∂ ⎞ + + ⎛ ∂ ⎞ − ⎫ ⎪
⎜ ⎟ ⎜ ⎟ ⎬
⎜ ∂ ⎟ ⎜ ∂ ⎟ ⎪
⎝ ∑ ⎠ ⎝ ∑ ⎠ ⎭
4 ( ) ( )
( )
33 33
3
3 3 2 2
2 2
31 31 2
11 2
1
1 1
2 3 2 2 4
L n
i
E B B
p B p p
S S
i p
L
e h h x e
b c h t h h h
x h
η φ
ε
=ε
⎧ ⎛ ⎞ ⎡ ⎤ ⎛ ∂ ⎞
⎪ ⎛ ⎞ ⎛ ⎞
+ ∫⎨⎪⎩ ⎜⎜⎝ + ⎟ ⎢⎟⎠⎢⎣⎜⎝ + ⎟ ⎜⎠ ⎝− ⎟ ⎜⎠ ⎥ ⎜⎥ ⎝⎦ ∑ ∂ ⎟⎟⎠ − +
( ) 2 ( )2 2 31( ) 1( ) ( ) 2 ( )2 33 1( )2
1 1
n n S
i i
B p
i i p
x x
t e h h V t t V t dx
x x h
φ φ ε
η η
= =
⎛ ∂ ⎞ + + ⎛ ∂ ⎞− ⎫⎪
⎜ ⎟ ⎜ ⎟ ⎬
⎜ ∂ ⎟ ⎜ ∂ ⎟ ⎪
⎝∑ ⎠ ⎝∑ ⎠ ⎭
(24)
將(21)式與(22)式整理成
total M B p
T
=
T+ +
T T( )2 ( ) ( ) 2
0 1
1 1
2 2
L n
B B i
i
Mz t b
ρ
h zη
tφ
x dx=
⎡ ⎛ ⎞⎤
= + ⎢ +⎜ ⎟⎥
⎝ ⎠
⎣ ∑ ⎦
∫ &
& &
2 ( ) ( ) 4 ( ) ( )
1 3
2 2
1 1
1 1
2 2
L n L n
p p i p p i
i i
L L
b
ρ
h zη
tφ
x dx bρ
h zη
tφ
x dx= =
⎡ ⎛ ⎞⎤ ⎡ ⎛ ⎞⎤
+ ⎢ +⎜ ⎟⎥ + ⎢ +⎜ ⎟⎥
⎝ ⎠ ⎝ ⎠
⎣ ∑ ⎦ ⎣ ∑ ⎦
∫ & & ∫ & &
(25)
將(23)及(24)式整理成
total M B p
U
=
U+
U+
U( )
2( )
2( )
22 0 1
1 1
2 2
L n
i B B
i
kz t E I t x dx
x η φ
=
⎛ ∂ ⎞
= + ∫ ⎜ ⎜ ⎝ ∑ ∂ ⎟ ⎟ ⎠
2 ( ) ( ) ( ) ( ) ( ) 33 ( )
1
2 2 2
2
1 1
2 2
1 1
1 2
S
L n n
i i
i i p
L
x x
b A t CV t t V t dx
x x h
φ φ ε
η η
= =
⎧ ⎛ ∂ ⎞ ⎛ ∂ ⎞ ⎫
⎪ ⎪
+ ∫⎨⎪⎩ ⎜⎜⎝∑ ∂ ⎟⎟⎠ + ⎜⎜⎝∑ ∂ ⎟⎟⎠− ⎬⎪⎭
4 ( ) ( ) ( ) ( ) ( ) 33 ( )
3
2 2 2
2
1 1
2 2
1 1
1 2
L n n S
i i
i i p
L
x x
b A t CV t t V t dx
x x h
φ φ ε
η η
= =
⎧ ⎛ ∂ ⎞ ⎛ ∂ ⎞ ⎫
⎪ ⎪
+ ∫⎨⎪⎩ ⎜⎜⎝∑ ∂ ⎟⎟⎠ + ⎜⎜⎝∑ ∂ ⎟⎟⎠− ⎬⎪⎭
(26)
其中
12
( )
33 33
3 3
2 2
31 31 2
11
1
3 2 2 4
E B B
p B p p
S S
p
e h h e
A c h h h h
ε h ε
⎛ ⎞ ⎡ ⎛ ⎞ ⎛ ⎞ ⎤
= ⎜ ⎜ ⎝ + ⎟ ⎢ ⎟ ⎝ ⎠ ⎢ ⎣ ⎜ + ⎟ ⎜ ⎠ ⎝ − ⎟ ⎠ ⎥ ⎥ ⎦ − +
(27)
( )
31 B p
C
=
e h+
h(28)
外力作功部份,如
W = f t( )⋅z(29)
續探討壓電材料部份貼覆於樑上所產生之等效彎矩,首先施予壓電材料一電壓(V2
),
因壓電材料受到逆壓電效應之影響,迫使壓電材料於長度方向產生變化,然而本計畫是將 壓電材料貼覆於樑結構上,且假設壓電材料與樑結構為緊密貼合,故壓電材料之長度方向 變化會受到限制,以致於在樑結構之橫向產生一位移變化,此位移變化可視為一等效彎矩 作用於樑上之變化,如圖 12 所示。
圖 12: Unimorph 型壓電懸臂樑示意圖 在此先行假設:
I. 部份覆蓋壓電材料與中間金屬樑為緊密結合,故沒有相對位移產生。
II. 此結構忽視 Y 的方向變形。
III. 外部電壓所提供之方向為 Z 的方向。
將本構方程式中 D-type 公式整理成
11 11 11
2
1 31 3 31 3
2
1
p E E E
p p p
S d E w d E
T z
s s x s
− − ∂
= = −
∂
(30)
因樑本身沒有電性,故方程式可表示為
11
2
2
1
B B
T z w
s x
− ∂
= ∂
(31)
接著以材料力學之觀念推導彎曲力矩
( )
Mp
= − ∫
T zdydz(32)
將(30)與(31)式代入(32)式整理後可得
2 2 2 p
M K w NV
x
= ∂ +
∂
( 33 )
11 11
3
2 2 3
3 3
3 4 2 12
B
B pa B pa pa
E
p B
h b
K b h h h h h
s s
⎛ ⎞
= ⎜ + + ⎟ +
⎝ ⎠
(34)
( )
11
31
2 Ep B p
N d b h h
= s +
(35)
其中
K為壓電樑之抗彎強度;
N為每單位電壓產生之撓曲;
11
E
sp
![圖 1: Hartog[1]研究之無阻尼動態吸振器模型](https://thumb-ap.123doks.com/thumbv2/9libinfo/9125995.410346/6.892.103.806.665.1080/圖1Hartog1研究之無阻尼動態吸振器模型.webp)