國立臺灣大學工學院機械工程學研究所 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
數位影像相關法於二維軌跡及變形量測和應用於建構 立體形貌
Digital Image Correlation of Two-Dimensional Trajectory and Deformation Measurement and Applied to Construct 3D Surface
王盛儀 Sheng-Yi Wang
指導教授:馬劍清 博士 Advisor: Chien-Ching Ma, Ph.D.
中華民國 107 年 7 月
誌謝
時光飛逝,碩士班的尾聲終將來到,於求學的各個階段都受到許多不同人的幫 助與提攜,在此感謝所有一路上幫助我的人。
首先感謝馬劍清教授的指導,讓我得以在自由的環境以及充沛的資源下作各 式各樣的嘗試與研究,老師擁有無比的耐心,容忍我在許多基礎的知識能更加鑽研,
對各種問題都能有敏銳的思考,在研究方面提供我許多協助,並在碩士研究的各階 段指引我往正確的方向前進,非常感謝老師的照顧。
感謝論文口試委員:台大的陳亮嘉教授與林沛群教授、北科大的林志哲教授與 張敬源教授,在百忙之中快速的對我的論文給予指正與意見,使我的論文得以更全 面更完整。
感謝破壞實驗室成員們的照顧,將我帶入數位影像相關法世界的亮至及氣氛 大師柏勳、最後一起沒日沒夜奮鬥的亦莊、接觸各種設備的展誼、常回實驗室幫忙 的秉良、大氣系學長浚瑜、座位前主人冠德、在設計之路前進的詠芢、總是拉著實 驗設備的國彭、幫忙處理報帳的冠瑋、賞金獵人瑞清、聲學繪畫大師渝斐、一起練 身體的宇倫、不斷在峽谷奮鬥的右年、漫步太空的揚中、辛苦照顧家人的宏晉、飛 彈博士生賢修、懷抱航空夢的英澤、話題無窮的柔萱、手搖杯大師惠媛、一同起造 自動停車塔的力揚、忙碌寡言的哲維、台大的小學弟義翔、成大的小學弟俊賢、聲 學大師追隨者紫茵、對破壞實驗室很有期待的婉柔、英國交換生子芸、羅志祥頭號 粉絲曉萍、奮發的交換生晨陽及睿芳,大家的支持讓我能持續向前並在必要時對我 的研究提出疑問或挑戰,讓我更能時時刻刻不斷精進。同時也很感謝實驗室的療育 夥伴:可愛小鼠一代柯批與勝文、可愛小鼠二代阿弟仔、乖巧的鼠女兒維尼、亮至 學長寄託的大肚魚們,在心神緊繃時看看他們就能回到適合研究的狀態。
感謝我的家人,爸爸 王朝正、媽媽 郭麗琴的扶養與照顧,容忍我經常為了實 驗與研究而晚歸,也感謝互相支持的哥哥盛平、堂姐悅寧、堂弟盛緯及堂妹悅容。
最後要特別感謝我的女友曉騏,在遠距離的過程還要容忍我工作狂的性格,希望未 來還能夠繼續相互陪伴與扶持。
摘要
本論文由二維數位影像相關法出發,首先驗證二維量測能力,並將其拓展至三 維量測問題,討論二維與三維間的誤差關係,最終建構一套單相機三維形貌建構系 統。
二維的數位影像相關法之量測精度透過與雷射位移計之間的比較可得到驗證,
透過二維精密平台的回歸原點進行軌跡及位移量測,成功驗證數位影像相關法具 有超越雷射位移計的量測能力,並對平台控制問題進行探討。二維精密平台過去具 有過衝(Overshoot)的問題,具有造成平台毀損的可能性,本文在驗證數位影像相關 法量測能力的同時利用邏輯晶片建構阻斷保護電路解決過去的系統缺陷。除此之 外,將系統建構於 MATLAB 環境下,使平台可達到任意角度、任意方向、任意速 度的運動。上述的改進內容透過數位影像相關法可得到驗證,並同時觀察到平台的 二維軌跡在慢速移動下與輸入指令圖形相比有較好的對應性。
文中透過中空圓環加壓問題驗證二維影像相關法的全場位移及應變量測能力,
有限元素法的分析結果與實際加壓圓環時以二維數位影像相關法測得的表面位移 場、應變場結果具有良好的對應性,說明數位影像相關法於量測全場位移及應變具 有良好的能力。
本文提出以幾何關係推導的二維與三維誤差的相關式,並提出一套獲得標準 次像素位移影像的方法,驗證數位影像相關法使用相關係數極值搜尋法(CCPF)的 精度為 0.02 pixel。將空間中的量測點座標代入關係式中可預判在該架設下的三維 定位誤差,文中透過實際量測特徵點於三維中的定位誤差與預判結果相比,成功驗 證推導出的關係式,並提出一套作業流程最佳化量測實驗架設。
最後將數位影像相關法結合單軸機器人以及二維精密平台,組成單相機形貌 量測系統,具有自主改變視角的能力,使系統具有主動量測的可能性,並透過量測 校正板、不等直徑塑膠圓管及貝多芬石膏像,驗證系統於建構立體形貌的能力。
Abstract
This thesis start from verifying 2D Digital Image Correlation (DIC) ability then expand the topic to 3D measuring errors, and finally build a 3D surface constructing system by using single camera and automatic devices.
2D DIC trajectory measurement ability can be proven by comparing to 1D LASER displacement meter result, and have successfully matched by measuring XXY precision stage origin motion trajectory and displacement. The stage operating system had defect of overshooting, and have been fixed by applying a protecting logic circuit which will block the motor input for state of limit. Also, the system is changed into MATLAB environment for compatibility and has improved the degree of freedoms for angle displacement, direction and speed. The stage is found having better trajectory result compared with the shape of input command while operating with lower speed.
Measurement of a three-point-forced acrylic circular plate is used to verify the full- field displacement and deformation ability of 2D DIC. The result of displacement and deformation measured by 2D DIC system are similar to the displacement and deformation simulations computed by COMSOL.
This thesis presents a relationship between 2D and 3D measurement error derived by geometry, and gives a procedure to make sub-pixel standard image which verifies the 2D DIC method with an accuracy of 0.02 pixel. 3D measurement error can be predict by applying coordinate values of point in 3D space and error on 2D plane and verified by a test measuring feature point in different positions.
At last, the thesis build a 3D surface measuring system by single camera, a single axis robot and precision stage, which have the possibility to capture photos for different view angle. The system ability is verified from measuring checker board plane, and successfully built 3D surface of an unequal diameter PVC pipe and a Beethoven plaster statue.
Key words: Digital image correlation, Automatic devices, full-field measurement, non-
目錄
摘要 ... I Abstract ... III 目錄 ... V 表目錄 ... IX 圖目錄 ... XI
第一章 前言 ... 1
1.1 研究動機 ... 1
1.2 文獻回顧 ... 2
1.3 內容簡介 ... 4
第二章 數位影像相關法及實驗儀器介紹 ... 7
2.1 數位影像相關法(DIC)簡介 ... 7
2.1.1 基本原理 ... 7
2.1.2 相關係數 ... 8
2.1.3 形狀函數 ... 9
2.2 搜尋演算法 ... 10
2.2.1 相關係數極值搜尋法 ... 10
2.2.2 牛頓拉福森法 ... 11
2.2.3 正向疊加牛頓拉福森法 ... 13
2.2.4 反向合成高斯牛頓法 ... 15
2.3 數位影像相關法種類 ... 18
2.3.1 二維數位影像相關法 ... 18
2.3.2 立體數位影像相關法 ... 19
2.4 實驗儀器介紹 ... 21
2.4.1 雷射位移計 ... 21
2.4.2 數位工業相機 ... 21
2.4.3 數位相機 ... 22
第三章 數位影像相關法於二維精密平台軌跡追蹤及應用 ... 39
3.1 二維精密平台運動方程式 ... 39
3.2 建構以 MATLAB 下的平台控制程式 ... 42
3.2.1 以 MATLAB 操作二維精密平台的子程式 ... 42
3.2.2 光遮斷器極限開關邏輯閘電路... 43
3.3 二維精密平台軌跡數位影像相關法量測結果 ... 46
3.3.1 實驗架設 ... 46
3.3.2 X 軸作動、Y 軸作動、定義平台原點 ... 47
3.3.3 原點回歸與位移量測結果 ... 47
3.3.4 馬達一單獨作動 ... 58
3.3.5 馬達二單獨作動 ... 62
3.3.6 平台對定圓心轉動 ... 66
3.4 小結 ... 70
第四章 數位影像相關法於中空圓環的全場位移與應變量測 ... 123
4.1 三點施力於中空圓環的實驗架設 ... 123
4.2 等向性圓環材料性質測試 ... 124
4.2.1 超音波探傷儀波速量測 ... 125
4.2.2 材料常數量測結果 ... 126
4.3 中空圓環三點施力有限元素法模擬 ... 127
4.3.1 COMSOL 模型建立 ... 127
4.3.2 COMSOL 模型邊界條件設定 ... 127
4.3.3 COMSOL 模擬結果說明 ... 129
5.1.2 具有夾角的雙相機架設誤差推導 ... 175
5.1.3 相機架設與定位誤差的討論 ... 179
5.2 二維數位影像相關法量測誤差標定 ... 184
5.2.1 實驗架設 ... 184
5.2.2 實驗結果與討論 ... 185
5.3 平行無夾角雙相機架設量測三維空間點座標 ... 186
5.3.1 實驗架設 ... 186
5.3.2 實驗結果與討論 ... 187
5.4 誤差關係式的應用方式 ... 188
5.5 小結 ... 189
第六章 應用數位影像相關法建構立體形貌 ... 253
6.1 建構單相機立體形貌量測系統 ... 253
6.1.1 系統架設 ... 255
6.1.2 建構校正板平面 ... 256
6.2 不等直徑的圓管形貌量測 ... 258
6.2.1 二維影像形貌邊緣檢測量測實驗架設 ... 258
6.2.2 二維影像形貌邊緣檢測量測結果與討論 ... 259
6.2.3 立體數位影像相關法形貌量測結果 ... 259
6.3 貝多芬石膏像臉部形貌量測 ... 260
6.3.1 實驗架設 ... 260
6.3.2 臉部形貌建構流程 ... 260
6.3.3 臉部形貌建構結果與討論 ... 261
6.4 小結 ... 262
第七章 結論與未來展望 ... 299
7.1 結論 ... 299
7.2 未來展望 ... 301
表目錄
表 2- 1 交叉相關係數公式整理 ... 23
表 2- 2 總平方差相關係數公式整理... 23
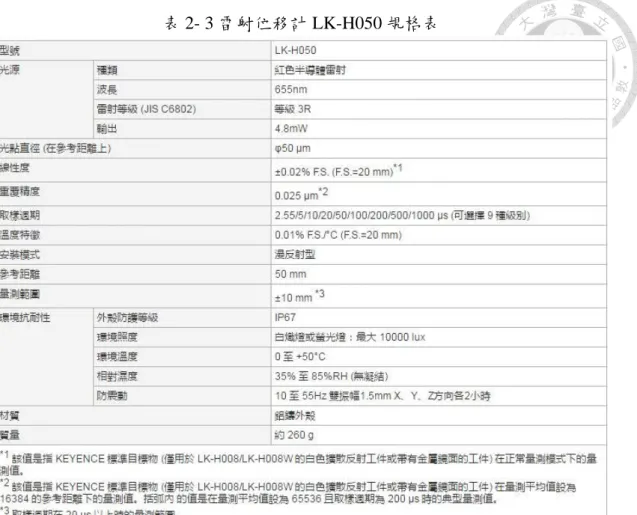
表 2- 3 雷射位移計 LK-H050 規格表 ... 24
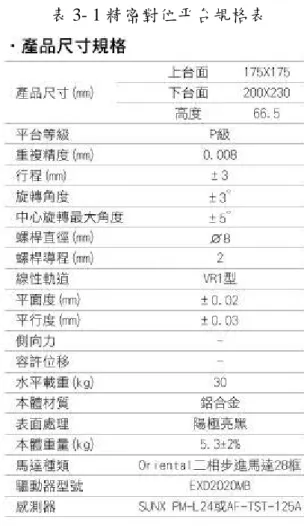
表 3- 1 精密對位平台規格表 ... 72
表 4- 1 等向性材料常數計算結果 ... 135
表 4- 2 光學彈性材料待測物尺寸 ... 135
表 4- 3 中空圓環有限元素法模擬邊界條件表 ... 136
表 6- 1 以校正工具箱建構的空間中點與平面間最大距離 ... 263
表 6- 2 以單軸機器人位移量建構的空間中點與平面間最大距離 ... 264
圖目錄
圖 2- 1 樣板子集合與半窗格示意圖 ... 25
圖 2- 2 特徵圖形:(a)噴漆特徵, (b)網板印刷特徵, (c)書寫特徵, (d)特徵點貼紙 .... 25
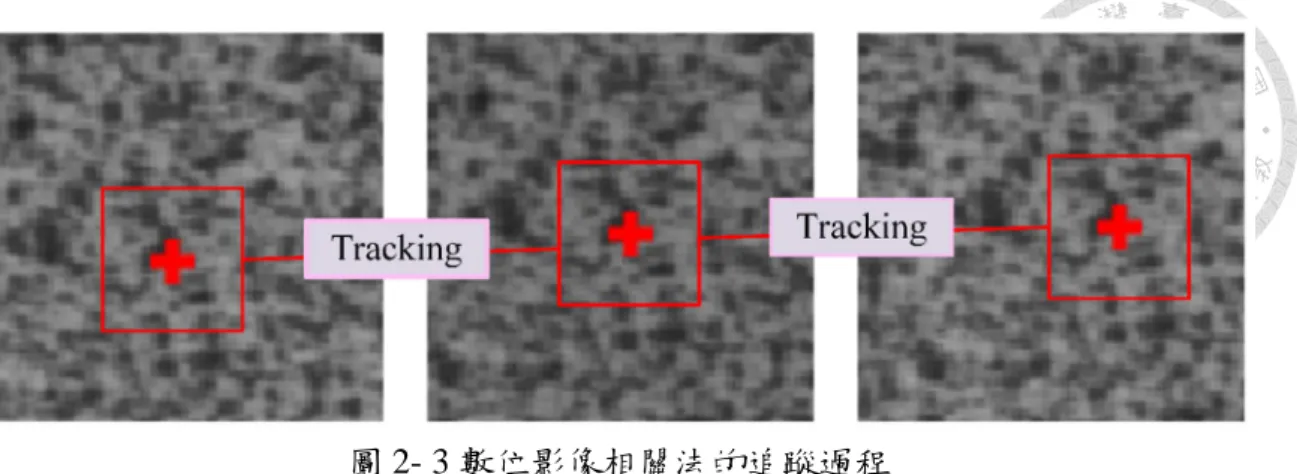
圖 2- 3 數位影像相關法的追蹤過程 ... 26
圖 2- 4 數位影像相關法的影像搜尋示意圖 ... 26
圖 2- 5 全場相關性運算示意圖:(a)取出樣板子影像對變形圖片進行全場相關係數 運算, (b)得到相關係數場與相關係數極值的位置 ... 27
圖 2- 6 元素剛體平移示意圖 ... 27
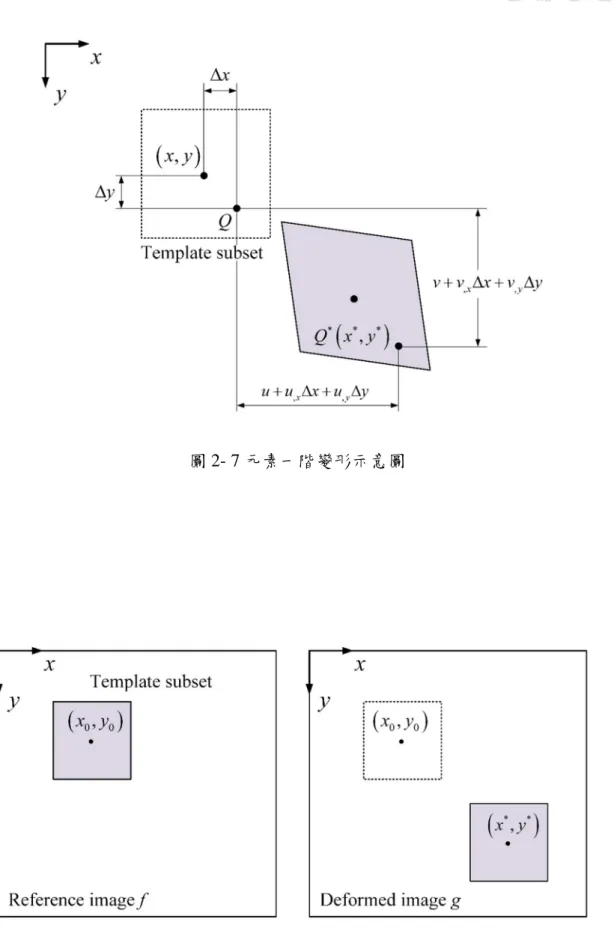
圖 2- 7 元素一階變形示意圖 ... 28
圖 2- 8 相關係數極值搜尋法示意圖 ... 28
圖 2- 9 相關係數極值搜尋法過程:(a)先求得整數末位置像素解, (b)再求得小數點 末位置像素解... 29
圖 2- 10 牛頓拉福森影像搜尋法示意圖... 29
圖 2- 11 牛頓拉福森影像搜尋法流程... 30
圖 2- 12 正向疊加(反向合成)高斯牛頓影像搜尋法示意圖 ... 30
圖 2- 13 正向疊加高斯牛頓影像搜尋法流程 ... 31
圖 2- 14 反向合成高斯牛頓影像搜尋法流程 ... 32
圖 2- 15 理想的針孔成像模型示意圖 ... 33
圖 2- 16 理想的針孔成像模型:(a)上視圖, (b)側視圖 ... 33
圖 2- 17 座標轉換示意圖 ... 34
圖 2- 18 單一相機投影示意圖 ... 34
圖 2- 19 雙相機投影示意圖 ... 35
圖 2- 20 雙相機模型在各個座標下的參數示意圖 ... 35
圖 2- 21 雷射位移計 LK-H050 雷射位移計 ... 36
圖 2- 22 工業相機 GS3-U3-23S6M-C 外觀圖 ... 36
圖 2- 23 Nikon D800 相機外觀 ... 37
圖 2- 24 超音波探傷儀 Krautkramer Branson USD15 ... 37
圖 3- 1 精密二維平台 CAD 圖 ... 73
圖 3- 2 二維精密平台結構示意圖 ... 73
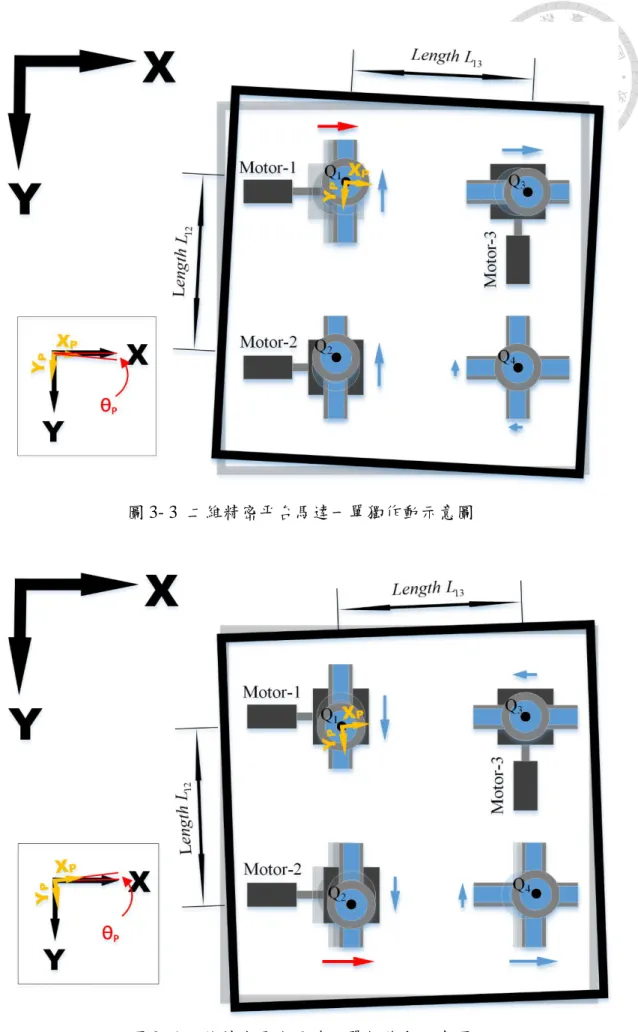
圖 3- 3 二維精密平台馬達一單獨作動示意圖 ... 74
圖 3- 4 二維精密平台馬達二單獨作動示意圖 ... 74
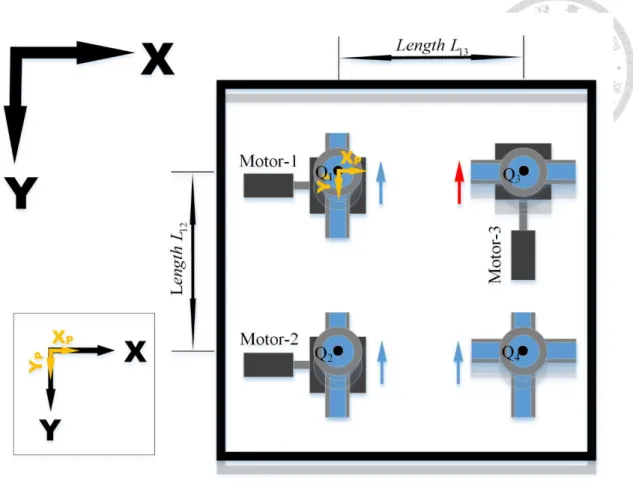
圖 3- 5 二維精密平台馬達三單獨作動示意圖 ... 75
圖 3- 6 國家儀器資料擷取卡 DAQ9401 外觀圖及腳位定義圖 ... 75
圖 3- 7 國家儀器資料擷取卡機箱 cDAQ9171 外觀圖 ... 76
圖 3- 8 LabJack LEGACY U12 資料擷取卡腳位定義圖 ... 76
圖 3- 9 原於 LabVIEW2014 建構的操作系統設備架構圖 ... 77
圖 3- 10 原於 LabVIEW 建構的操作系統使用者操作介面 ... 77
圖 3- 11 MATLAB 操作子程式流程圖 ... 78
圖 3- 12 以 Arduino UNO 取代數位邏輯電壓輸出功能的操作子程式流程圖 ... 78
圖 3- 13 原於 LabVIEW 操作系統流程圖 ... 79
圖 3- 14 每組步進馬達的阻斷電路邏輯符號 ... 79
圖 3- 15 完成的阻斷邏輯電路板實際照片 ... 80
圖 3- 16 變更後的系統設備架構圖 ... 80
圖 3- 17 Nikon AF-S NIKKOR 28-300 mm f/3.5-5.6G ED VR ... 81
圖 3- 18 KENKO 接物寫真環 ... 81
圖 3- 19 架設於垂直光學桌面金屬柱的相機 ... 82
圖 3- 20 水平氣泡量測相機水平 ... 82
圖 3- 21 光學桌面實驗架設拍攝二維精密平台 ... 83
圖 3- 22 補強光源 ... 83
圖 3- 30 量測 LabVIEW 系統於每次執行一百脈波的 X 軸原點回歸 ... 87
圖 3- 31 量測 LabVIEW 系統於每次執行十脈波的 X 軸原點回歸 ... 88
圖 3- 32 量測 LabVIEW 系統於每次執行一脈波的 X 軸原點回歸 ... 88
圖 3- 33 量測 LabVIEW 系統搭配阻斷邏輯閘於每次執行一百脈波的 X 軸原點回 歸 ... 89
圖 3- 34 量測 LabVIEW 系統搭配阻斷邏輯閘於每次執行十脈波的 X 軸原點回歸 ... 89
圖 3- 35 量測 LabVIEW 系統搭配阻斷邏輯閘於每次執行一脈波的 X 軸原點回歸 ... 90
圖 3- 36 量測 MATLAB 系統以每秒一千兩百脈波執行 X 軸原點回歸 ... 90
圖 3- 37 量測 MATLAB 系統以每秒四百八十脈波執行 X 軸原點回歸 ... 91
圖 3- 38 量測 MATLAB 系統以每秒兩百四十脈波執行 X 軸原點回歸 ... 91
圖 3- 39 雷射位移計量測 LabVIEW 系統 X 軸原點回歸 ... 92
圖 3- 40 數位影像相關法量測 LabVIEW 系統 X 軸原點回歸 ... 92
圖 3- 41 雷射位移計量測 LabVIEW 系統搭配阻斷邏輯閘 X 軸原點回歸 ... 93
圖 3- 42 數位影像相關法量測 LabVIEW 系統搭配阻斷邏輯閘 X 軸原點回歸 ... 93
圖 3- 43 雷射位移計量測 MATLAB 系統 X 軸原點回歸 ... 94
圖 3- 44 數位影像相關法量測 MATLAB 系統 X 軸原點回歸... 94
圖 3- 45 Y 軸原點回歸量測特徵點示意圖,空間參數 ... 95
圖 3- 46 量測 LabVIEW 系統於每次執行一百脈波的 Y 軸原點回歸 ... 95
圖 3- 47 量測 LabVIEW 系統於每次執行十脈波的 Y 軸原點回歸 ... 96
圖 3- 48 量測 LabVIEW 系統於每次執行一脈波的 Y 軸原點回歸 ... 96
圖 3- 49 量測 LabVIEW 系統搭配阻斷邏輯閘於每次執行一百脈波的 Y 軸原點回 歸 ... 97
圖 3- 50 量測 LabVIEW 系統搭配阻斷邏輯閘於每次執行十脈波的 Y 軸原點回歸 ... 97
圖 3- 51 量測 LabVIEW 系統搭配阻斷邏輯閘於每次執行一脈波的 Y 軸原點回歸 ... 98
圖 3- 53 量測 MATLAB 系統以每秒四百八十脈波執行 Y 軸原點回歸 ... 99
圖 3- 54 量測 MATLAB 系統以每秒兩百四十脈波執行 Y 軸原點回歸 ... 99
圖 3- 55 雷射位移計量測 LabVIEW 系統 Y 軸原點回歸 ... 100
圖 3- 56 數位影像相關法量測 LabVIEW 系統 Y 軸原點回歸 ... 100
圖 3- 57 雷射位移計量測 LabVIEW 系統搭配阻斷邏輯閘 Y 軸原點回歸 ... 101
圖 3- 58 數位影像相關法量測 LabVIEW 系統搭配阻斷邏輯閘 Y 軸原點回歸 .... 101
圖 3- 59 雷射位移計量測 MATLAB 系統 Y 軸原點回歸 ... 102
圖 3- 60 數位影像相關法量測 MATLAB 系統 Y 軸原點回歸... 102
圖 3- 61 量測 LabVIEW 系統搭配阻斷邏輯閘於每次執行一脈波的 X 軸原點回歸 時的 Y 方向位移 ... 103
圖 3- 62 量測 LabVIEW 系統搭配阻斷邏輯閘於每次執行一脈波的 Y 軸原點回歸 時的 X 方向位移 ... 103
圖 3- 63 XY 軸同動量測特徵點示意圖,空間參數 ... 104
圖 3- 64 二維精密平台 XY 軸同動大太陽位移測試輸入馬達驅動脈波位置圖 .... 104
圖 3- 65 數位影像相關法量測平台每秒八百脈波 XY 同動大太陽路徑 ... 105
圖 3- 66 二維精密平台 XY 軸同動小太陽位移測試輸入馬達驅動脈波位置圖 .... 105
圖 3- 67 數位影像相關法量測平台每秒八百脈波 XY 同動小太陽路徑 ... 106
圖 3- 68 數位影像相關法量測平台每秒八百脈波 XY 同動繪製三半徑同心圓形 106 圖 3- 69 數位影像相關法量測平台每秒四百脈波 XY 同動小太陽路徑 ... 107
圖 3- 70 數位影像相關法量測平台每秒四百脈波並剪短每段路程小於 200 pulse 的 XY 同動小太陽路徑 ... 107
圖 3- 71 數位影像相關法量測平台每秒一百脈波 XY 同動小太陽路徑 ... 108
圖 3- 79 點 2 於馬達一正向作動的 V 位移一次微分與線性回歸曲線... 112
圖 3- 80 點 1 於馬達一逆向作動的 U 位移一次微分與線性回歸曲線... 112
圖 3- 81 點 1 於馬達一逆向作動的 V 位移一次微分與線性回歸曲線... 113
圖 3- 82 點 2 於馬達一逆向作動的 U 位移一次微分與線性回歸曲線... 113
圖 3- 83 點 2 於馬達一逆向作動的 V 位移一次微分與線性回歸曲線... 114
圖 3- 84 單獨作動馬達二實驗的追蹤特徵點 ... 114
圖 3- 85 馬達二單獨作動的追蹤點位移圖 ... 115
圖 3- 86 馬達二單獨作動的追蹤點 X 方向位移圖 ... 115
圖 3- 87 馬達二單獨作動的追蹤點 Y 方向位移圖 ... 116
圖 3- 88 點 1 於馬達二正向作動的 U 位移一次微分與線性回歸曲線... 116
圖 3- 89 點 1 於馬達二正向作動的 V 位移一次微分與線性回歸曲線... 117
圖 3- 90 點 2 於馬達二正向作動的 U 位移一次微分與線性回歸曲線... 117
圖 3- 91 點 2 於馬達二正向作動的 V 位移一次微分與線性回歸曲線... 118
圖 3- 92 點 1 於馬達二逆向作動的 U 位移一次微分與線性回歸曲線... 118
圖 3- 93 點 1 於馬達二逆向作動的 V 位移一次微分與線性回歸曲線... 119
圖 3- 94 點 2 於馬達二逆向作動的 U 位移一次微分與線性回歸曲線... 119
圖 3- 95 點 2 於馬達二逆向作動的 V 位移一次微分與線性回歸曲線... 120
圖 3- 96 馬達一單獨作動的追蹤點 X 方向位移圖放大圖 ... 120
圖 3- 97 馬達二單獨作動的追蹤點 X 方向位移圖放大圖 ... 121
圖 3- 98 以載物板座標原點 Q1 為圓心作圓弧路徑特徵點 ... 121
圖 3- 99 馬達二單獨作動比對圓弧路徑追蹤特徵點 ... 122
圖 3- 100 以載物板座標原點 Q1 為圓心畫圓弧及馬達二單獨作動路徑比對圖 ... 122
圖 4- 1 圓環三點施力實驗系統示意圖 ... 137
圖 4- 2 圓環三點施力實驗架設照片 ... 137
圖 4- 3 工業相機搭配的 50 mm 鏡頭 ... 138
圖 4- 4 噴塗斑點的光學彈性材料壓克力中空圓環 ... 138
圖 4- 5 鋁製施力架照片... 139
圖 4- 6 七公斤掛附施力砝碼 ... 139
圖 4- 8 鋁製角度模塊 ... 140 圖 4- 9 槓桿加壓施力的自由體圖分析 ... 141 圖 4- 10 鐵製加壓平台歪斜示意圖 ... 141 圖 4- 11 平台角度限制壓克力支撐架... 142 圖 4- 12 砝碼升降裝置 ... 142 圖 4- 13 超音波量測料常數系統架設示意圖 ... 143 圖 4- 14 光學彈性壓克力圓環與未空孔圓環 ... 143 圖 4- 15 鐵製加壓平台與同材料製成的塊材 ... 144 圖 4- 16 光學彈性壓克力材料縱波波形量測結果 ... 145 圖 4- 17 光學彈性壓克力材料橫波波形量測結果 ... 145 圖 4- 18 鐵製塊材縱波波形量測結果 ... 146 圖 4- 19 鐵製塊材橫波波形量測結果 ... 146 圖 4- 20 鋁製施力架縱波波形量測結果... 147 圖 4- 21 鋁製施力架橫波波形量測結果... 147 圖 4- 22 光學彈性材料三點施力力圖分析 ... 148 圖 4- 23 有限元素法軟體 COMSOL 建構的圓環網格切割結果 ... 148 圖 4- 24 於 120 度施力作用下的 COMSOL 邊界條件設定模擬結果與理論質計算結 果及光彈法拍攝結果比較 ... 149 圖 4- 25 有限元素法軟體 COMSOL 應力模擬結果 ... 150 圖 4- 26 有限元素法軟體 COMSOL 總位移量模擬結果 ... 151 圖 4- 27 有限元素法軟體 COMSOL 模擬與 DIC 量測 X 方向位移量結果 ... 152 圖 4- 28 有限元素法軟體 COMSOL 模擬與 DIC 量測 X 方向位移量結果(續) ... 153
圖 4- 36 有限元素法軟體 COMSOL 模擬與 DIC 量測 22 方向應變量結果(續) .... 161 圖 4- 37 有限元素法軟體 COMSOL 模擬不同角度施力下於外圓邊界的 X 位移 . 162 圖 4- 38 有限元素法軟體 COMSOL 模擬不同角度施力下於外圓邊界的 Y 位移 . 162 圖 4- 39 數位影像相關法計算流程圖 ... 163 圖 4- 40 數位影像相關法圓環追蹤點特徵選取流程 ... 163 圖 4- 41 數位影像相關法圓環追蹤特徵點示意圖 ... 164 圖 5- 1 點 S 與相機間於 X-Z 的平面幾何關係 ... 190 圖 5- 2 點 S 與相機間於 X-Z 的平面幾何關係 ... 190 圖 5- 3 影像座標於 U 軸上具有誤差時的幾何關係 ... 191 圖 5- 4 影像座標於 U 軸上具有誤差時的幾何關係(續) ... 191 圖 5- 5 影像座標於 U 軸上具有誤差時的幾何關係(續) ... 192 圖 5- 6 左相機平面於兩相機夾角q 的影像平面座標點 ... 192 圖 5- 7 右相機平面於兩相機夾角q 的影像平面座標點 ... 192 圖 5- 8 帶有兩個旋轉台的光學積木相機架設平板 ... 193 圖 5- 9 相機接口轉接 C-F Mount ... 193 圖 5- 10 Nikon AF-S NIKKOR 14-24 mm f/2.8G ED ... 194 圖 5- 11 工業相機搭配的 50 mm 鏡頭 ... 194 圖 5- 12 相機間距為 400 mm 平行架設的 X 方向三維建構誤差 ... 195 圖 5- 13 相機間距為 400 mm、平行架設的 X 方向三維建構誤差 ... 196 圖 5- 14 相機間距為 400 mm、平行架設的 Y 方向三維建構誤差 ... 197 圖 5- 15 相機間距為 400 mm、平行架設的 Y 方向三維建構誤差 ... 198 圖 5- 16 相機間距為 400 mm、平行架設的 Z 方向三維建構誤差... 199 圖 5- 17 相機間距為 400 mm、平行架設的 Z 方向三維建構誤差... 200 圖 5- 18 相機平行架設焦距參數 2000 pixel 相機間距改變於 X 方向定位誤差 .... 201 圖 5- 19 相機平行架設焦距參數 2000 pixel 相機間距改變於 X 方向定位誤差(續) ... 202 圖 5- 20 相機平行架設焦距參數 2000 pixel 相機間距改變於 Y 方向定位誤差 .... 203 圖 5- 21 相機平行架設焦距參數 2000 pixel 相機間距改變於 Y 方向定位誤差(續)
圖 5- 22 相機平行架設焦距參數 2000 pixel 相機間距改變於 Z 方向定位誤差 ... 205 圖 5- 23 相機平行架設焦距參數 2000 pixel 相機間距改變於 Z 方向定位誤差(續) ... 206 圖 5- 24 焦距參數 2000 pixel 間距 400 mm 等腰三角架設於左影像的微分... 207 圖 5- 25 焦距參數 2000 pixel 間距 400 mm 等腰三角架設於右影像的微分... 208 圖 5- 26 於等腰三角架設夾角變化時 Y 及 Z 方向定位誤差變化比例 ... 209 圖 5- 27 於等腰三角架設夾角變化時 Y 及 Z 方向定位誤差變化比例(續) ... 210 圖 5- 28 於等腰三角架設夾角變化時 Y 及 Z 方向定位誤差變化比例 (續) ... 211 圖 5- 29 於等腰三角形架設夾角變化時 X 方向定位誤差變化比例 ... 212 圖 5- 30 於等腰三角形架設夾角變化時 X 方向定位誤差變化比例(續) ... 213 圖 5- 31 於等腰三角形架設夾角變化時 X 方向定位誤差變化比例(續) ... 214 圖 5- 32 於等腰三角形架設夾角變化時 X 方向定位誤差 ... 215 圖 5- 33 於等腰三角形架設夾角變化時 X 方向定位誤差(續) ... 216 圖 5- 34 於等腰三角形架設夾角變化時 X 方向定位誤差(續) ... 217 圖 5- 35 於等腰三角形架設夾角變化時 Z 方向定位誤差 ... 218 圖 5- 36 於等腰三角形架設夾角變化時 Z 方向定位誤差(續) ... 219 圖 5- 37 於等腰三角形架設夾角變化時 Z 方向定位誤差(續) ... 220 圖 5- 38 於右相機旋轉角度時 Y 及 Z 方向定位誤差變化比例 ... 221 圖 5- 39 於右相機旋轉角度時 X 方向定位誤差變化比例 ... 222 圖 5- 40 右相機旋轉角度時 X 方向定位誤差變化比例(續) ... 223 圖 5- 41 右相機旋轉角度時 X 方向定位誤差變化比例(續) ... 224 圖 5- 42 於右相機旋轉角度時 X 方向定位誤差 ... 225 圖 5- 43 於右相機旋轉角度時 X 方向定位誤差(續) ... 226
圖 5- 50 相機對正目標時的 Y 及 Z 方向定位誤差變化比例(續) ... 233 圖 5- 51 相機對正目標時的 X 方向定位誤差變化比例 ... 234 圖 5- 52 相機對正目標時的 X 方向定位誤差變化比例(續) ... 235 圖 5- 53 相機對正目標時的 X 方向定位誤差 ... 236 圖 5- 54 相機對正目標時的 X 方向定位誤差(續) ... 237 圖 5- 55 相機對正目標時的 Z 方向定位誤差 ... 238 圖 5- 56 相機對正目標時的 Z 方向定位誤差(續) ... 239 圖 5- 57 Nikon AF-S NIKKOR 28-300 mm f/3.5-5.6G ED VR ... 240 圖 5- 58 TOYO 生產的單軸機器人 CGH-5-L5-100-M-TC100-03 搭配 TC-100 控制器 及 24 伏特電源供應器 ... 240 圖 5- 59 製作高解析度特徵影像及次像素位移影像的實驗架設 ... 241 圖 5- 60 高解析度特徵影像及次像素位移影像製作流程圖 ... 241 圖 5- 61 影像金字塔與高斯濾波示意圖... 242 圖 5- 62 拼接後的特徵影像 4100 1200 pixel´ ... 242 圖 5- 63 追蹤特徵點、半窗格與影像金字塔十六倍降採樣特徵影像 257 75 pixel´
... 242 圖 5- 64 次像素位移標準影像追蹤 400 點 U 方向位移量 ... 243 圖 5- 65 次像素位移標準影像追蹤 400 點 V 方向位移量 ... 243 圖 5- 66 次像素位移標準影像追蹤 400 點 U 方向誤差量盒鬚圖 ... 244 圖 5- 67 次像素位移標準影像追蹤 400 點 V 方向誤差量盒鬚圖 ... 244 圖 5- 68 建構三維空間點座標的實驗架設 ... 245 圖 5- 69 雷射位移計量測二維精密平台作動圖 ... 245 圖 5- 70 右相機選取的特徵點 ... 246 圖 5- 71 左相機追蹤所得的特徵點 ... 246 圖 5- 72 建構三維座標點實驗的點座標位移量 ... 247 圖 5- 73 點 1 於 X 方向的量測誤差 ... 247 圖 5- 74 點 1 於 Y 方向的量測誤差 ... 248 圖 5- 75 點 1 於 Z 方向的量測誤差 ... 248
圖 5- 77 點 10 於 Y 方向的量測誤差 ... 249 圖 5- 78 點 10 於 Z 方向的量測誤差 ... 250 圖 5- 79 點 20 於 X 方向的量測誤差 ... 250 圖 5- 80 點 20 於 Y 方向的量測誤差 ... 251 圖 5- 81 點 20 於 Z 方向的量測誤差 ... 251 圖 5- 82 誤差關係式於自由架設下的使用流程 ... 252 圖 5- 83 誤差關係式於固定鏡組下的使用流程 ... 252 圖 6- 1 單相機立體形貌量測系統圖 ... 265 圖 6- 2 相機於位置一與位置二建構的平面一與量測點與平面間距離 ... 265 圖 6- 3 相機於位置一與位置二建構的平面二與量測點與平面間距離 ... 266 圖 6- 4 相機於位置一與位置二建構的平面三與量測點與平面間距離 ... 266 圖 6- 5 相機於位置一與位置二建構的平面四與量測點與平面間距離 ... 267 圖 6- 6 相機於位置一與位置二建構的平面五與量測點與平面間距離 ... 267 圖 6- 7 相機於位置一與位置二建構的平面六與量測點與平面間距離 ... 268 圖 6- 8 相機於位置一與位置二建構的平面七與量測點與平面間距離 ... 268 圖 6- 9 相機於位置一與位置二建構的平面八與量測點與平面間距離 ... 269 圖 6- 10 相機於位置一與位置二建構的平面九與量測點與平面間距離... 269 圖 6- 11 相機於位置一與位置二建構的平面十與量測點與平面間距離 ... 270 圖 6- 12 相機於位置一與位置二建構的平面十一與量測點與平面間距離 ... 270 圖 6- 13 相機於位置一與位置二建構的平面十二與量測點與平面間距離 ... 271 圖 6- 14 相機於位置一與位置二建構的平面十三與量測點與平面間距離 ... 271 圖 6- 15 相機於位置一與位置二建構的平面十四與量測點與平面間距離 ... 272
圖 6- 23 相機於位置一與位置三建構的平面八與量測點與平面間距離... 276 圖 6- 24 相機於位置一與位置三建構的平面九與量測點與平面間距離... 276 圖 6- 25 相機於位置一與位置三建構的平面十與量測點與平面間距離... 277 圖 6- 26 相機於位置一與位置三建構的平面十一與量測點與平面間距離 ... 277 圖 6- 27 相機於位置一與位置三建構的平面十二與量測點與平面間距離 ... 278 圖 6- 28 相機於位置一與位置三建構的平面十三與量測點與平面間距離 ... 278 圖 6- 29 相機於位置一與位置三建構的平面十四與量測點與平面間距離 ... 279 圖 6- 30 不等直徑的塑膠圓管 ... 279 圖 6- 31 不等直徑的塑膠圓管尺寸示意圖 ... 280 圖 6- 32 二維影像量測圓管形貌的實驗架設 ... 280 圖 6- 33 二維影像量測圓管形貌的校正板影像 0.0288 mm/pixel ... 281 圖 6- 34 二維影像量測圓管形貌的圓管影像 ... 281 圖 6- 35 二維影像量測二值化圓管影像... 282 圖 6- 36 二值化圓管影像邊界影像搜尋結果及計算所得的圓心 ... 282 圖 6- 37 使用遮罩的二值化圓管影像邊界影像搜尋結果及計算所得的圓心 ... 283 圖 6- 38 數位影像相關法追蹤的特徵點示意圖 ... 283 圖 6- 39 由數位影像相關法於相機位置一與位置二建構的圓柱曲面 ... 284 圖 6- 40 由數位影像相關法於相機位置一與位置三建構的圓柱曲面 ... 284 圖 6- 41 由位置一與位置二的空間點反推的圓柱直徑及圓心位置 ... 285 圖 6- 42 由位置一與位置三的空間點反推的圓柱直徑及圓心位置 ... 285 圖 6- 43 符合圓形假設的座標點分層圖形 ... 286 圖 6- 44 在直徑交界處變形的座標點分層圖形 ... 286 圖 6- 45 貝多芬臉部形貌建構實驗使用的 8 mm 鏡頭 ... 287 圖 6- 46 未塗裝特徵的貝多芬石膏像 ... 287 圖 6- 47 塗裝特徵的貝多芬石膏像 ... 288 圖 6- 48 貝多芬石膏像臉部形貌建構系統架設圖 ... 288 圖 6- 49 貝多芬石膏像雙相機臉部形貌建構右側臉左方影像選取點位置 ... 289 圖 6- 50 貝多芬石膏像雙相機臉部形貌建構右側臉右方影像追蹤點位置 ... 289
圖 6- 52 貝多芬石膏像雙相機臉部形貌建構左側臉右方影像選取點位置 ... 290 圖 6- 53 貝多芬石膏像雙相機臉部形貌建構左側臉左方影像追蹤點位置 ... 291 圖 6- 54 貝多芬石膏像雙相機臉部形貌建構左側臉部形貌建構結果 ... 291 圖 6- 55 貝多芬石膏像單相機臉部形貌建構右側臉左方影像選取點位置 ... 292 圖 6- 56 貝多芬石膏像單相機臉部形貌建構右側臉右方影像追蹤點位置 ... 292 圖 6- 57 貝多芬石膏像單相機臉部形貌建構右側臉部形貌建構結果 ... 293 圖 6- 58 貝多芬石膏像單相機臉部形貌建構左側臉右方影像選取點位置 ... 293 圖 6- 59 貝多芬石膏像單相機臉部形貌建構左側臉左方影像追蹤點位置 ... 294 圖 6- 60 貝多芬石膏像單相機臉部形貌建構左側臉部形貌建構結果 ... 294 圖 6- 61 雙相機系統右側臉建構結果疊合右側拍攝照片 ... 295 圖 6- 62 雙相機系統左側臉建構結果疊合左側拍攝照片 ... 296 圖 6- 63 單相機系統右側臉建構結果疊合右側拍攝照片 ... 297 圖 6- 64 單相機系統左側臉建構結果疊合左側拍攝照片 ... 298
第一章 前言
1.1 研究動機
現代的資訊科技不斷進步,資訊時代的熱潮已經推展到工業界,世界大廠紛紛 拋出工業 4.0、智慧機械、物聯網等口號,以大量數據進行機器學習,力求大量資 訊能對產業有加值作用。隨著機器學習的熱潮,作為機器感知資訊來源的機器視覺 領域也日益發展興盛。隨半導體效能以及高效能電腦的迅速發展,複雜的影像視覺 計 算 應 用 於 自 動 化 設 備 上 也 成 為 可 能 , 自 動 化 光 學 檢 測 (Automated Optical Inspection, AOI)成為工業上不可或缺的重要角色,以光學量測為基礎的檢測設備以 被廣泛應用在工業量測與非破壞檢測(non-destructive test, NDT)領域,於電子產業、
航空工業、汽車產業、工具機產業、半導體產業都是光學量測技術的應用範圍。
在實驗力學的領域上,光學量測的方法有高精確度、非接觸與全域量測等優點,
相較於傳統的量測方式如應變規(Strain gauge)、量表(Dial gauge)、線性變數微分轉 換器(Linear variable differential transformer, LVDT)位移感測器等為接觸式單點量測 的技術,以光學量測為基礎的方法更適合且被廣泛應用於各種實驗力學量測與非 破壞檢測上,其中包括光彈法(Photoelasticity)[1]、疊紋法(Moiré) [2]、電子斑點干 涉術(Electronic speckle pattern interferometry, ESPI)[3],然而上述較為傳統的光學量 測方法之量測結果,如待測物表面斜率、位移場、位移場梯度等,以條紋圖案(Fringe pattern)的形式記錄在影像,因此有時難以精確地定位較為模糊的條紋位置,並且 需要以人工方式決定條紋的中心與量測原點的位置,在量測上還是有不便之處。
本論文所應用的數位影像相關法(Digital Image Correlation, DIC)為一種光學量 測的技術,具有非接觸式同時可達到全場量測的優勢,於量測時的架設十分簡便,
並可透過更換鏡頭達到跨尺度的量測,對於環境的要求較低,可適用於不同的惡劣 環境,由於以上的優勢,近年來在國內外皆有學者積極投入大量資源進行技術開發 及發展工程應用。
現今於市面上亦有將 DIC 技術商品化的軟體,如美國 Correlated Solutions 公 司借重南卡羅萊納大學之技術,開發的 VIC 2D/3D 系統,可量測三維全域式暫態
(GOM) 公司借重布朗什維克大學(Technical University Braunschweig)之技術,開 發 ARAMIS 系統。直接購買及使用商品化的系統與軟體,無法針對需求對演算法 的核心進行修改與優化,增進 DIC 搜尋演算法的量測精度與計算效能。對特殊情 形的實驗情況的需求時,如進行不規則區域的應變量測、將數位影像相關法量測 結果直接驅動外部設備等,會局限於既定的系統而不能精進及開創新穎的應用。
1.2 文獻回顧
2D DIC 光學量測技術發展於 1980 年間,為美國南卡羅萊納大學(University of South Carolina, USC)率先開發,起初 Peters[4]等人參考 ESPI 的原理,使用雷射斑 點照射在待測物表面,記錄待測物變形前與變形後之影像,使用相關係數求出表面 位移,並將全場位移量測結果結合實驗架設的邊界條件使用實驗邊界積分法 (Experimental boundary integral, EBI)求得量測區域之表面應力。接著 Sutton[5]等人 在試片表面上噴灑亂數斑點,將數位影像切割成數個子集合(Subset),使用雙線性 內插法(Bilinear interpolation)得次像素(Sub-pixel)的灰階值,並提出粗細迭代法 (Coarse-fine iteration approach)以最小方差為收斂依據,得到子集合的六個一階變形 參數(u v, , ¶u/¶x, ¶u/¶y, ¶v/¶x, ¶v/¶y ),量測懸臂薄樑受靜力負載下的撓度變形,
接著 Peters[6]等人利用相同做法進行旋轉圓盤的角速度與圓棒的振動量測。Chu[7]
等人改用交叉相關(Cross-correlation)係數,並分別應用於待測物表面剛體平移、剛 體旋轉、均勻有限應變的量測,驗證 DIC 應用於實驗力學領域的能力。Sutton[8]等 人與 Bruck[9]等人使用牛頓拉福森法(Newton-Raphson method, NR method)取代粗 細迭代法,在相同的量測精度下大幅降低 DIC 的計算時間。Vendroux[10]等人將牛 頓拉福森法中計算的海森矩陣(Hessian matrix)的高階項忽略,提出近似解後減少計 算海森矩陣的時間。到目前為止只考慮待測物表面具有ㄧ階變形,之後 Lu[11]等人
differences, ZNSSD)、零正規化交叉相關(Zero-normalized cross-correlation, ZNCC)與 參數零正規化交叉相關(Parametric zero-normalized cross-correlation, PSSDab)這三種 相關係數的等價性,並介紹一種與牛頓拉福森法等價的影像搜尋影算法,稱為疊代 最小平方法(Iterative least squares, ILS),最後針對 DIC 量測不規則形狀邊界提出一 種方法,對遇到邊界的子集合直接捨棄邊界的灰階資訊後直接進行計算。另外 Pan[14] 等 人 則 提 出 可 靠 度 導 向 位 移 搜 尋 策 略 (Reliability-guided displacement scanning strategy)取代較耗時的整數位移搜尋方法,以及事先計算全場內插係數表 節省內插計算的時間,這兩種方法均可增加 DIC 計算效率。
Baker[15]等人提出一種與正向疊加牛頓拉福森法(Forward additive Newton- Raphson method, FA-NR method)等價但計算效率較高的影像搜尋演算法,稱為反向 合成高斯牛頓法(Inverse compositional Gauss-Newton method, IC-GN method),並發 現這種 演算法的量測精度與 計算效率優於其他現有的 影像 搜尋 演算法[16]。
Pan[17][18]等人首先將反向合成高斯牛頓法應用在 DIC 領域上,但都只侷限於一 階變形參數,後來 Gao[19]等人推導出反向合成高斯牛頓法搭配二階變形參數的疊 代方法,並分別比較反向合成高斯牛頓法搭配一階與二階變形參數,應用在二維搜 尋與立體搜尋的精度比較,發現一階反向合成高斯牛頓法適用於小變形的二維搜 尋,二階反向合成高斯牛頓法適用於高階變形場或大變形的二維搜尋與立體搜尋。
近年來 Blaber[20]等人釋出一套免費的 2D DIC 軟體,使用 MATLAB 程式語言撰 寫,亦採用反向合成高斯牛頓法作為影像搜尋的核心。目前在 DIC 領域中反向合 成高斯牛頓法已成為主流的次像素影像搜尋演算法。
Stereo DIC 量測技術首先由 Kahn-Jetter[21]等人提出,使用兩台平行且垂直試 片表面的相機進行拍攝,利用 2D DIC 技術與三角量測原理成功運用於圓環及懸臂 樑面外變形量測。Blostein[22]等人對平行的相機架設進行誤差分析,並利用統計方 法驗證於平行架設下建構三維座標時的誤差大小出現的機率關係。Luo[23]等人使 用兩個理想針孔成像相機模型(Ideal pin-hole camera model),利用數個已知三維空 間的點及非線性最小平方校正方法,求出兩台相機之間剛體旋轉、剛體平移關係的 矩陣與各個相機內部投影參數矩陣,則兩台相機的位置與拍攝角度不再受到限制,
最後運用於待測物剛體平移與懸臂樑面外變形量測。由於 Stereo DIC 的便利性以
使用單一相機利用雙稜鏡分光來進行圓球體的三維形貌量測與橡膠薄膜的三維變 形量測,Wu[29]等人也使用單一相機利用雙稜鏡分光來進行圓柱體的剛體運動與 懸臂薄樑的面外變形量測,另外 Pankow[30]等人則提出使用單一相機利用反射鏡 分光的方法進行 Stereo DIC 量測,並應用在於高速大變形量測上。Kieu[31]等人也 使用單一相機利用反射鏡分光的方法進行三維形貌量測。
1.3 內容簡介
本文主軸由二維基礎出發,建構使用單相機的數位影像相關法三維形貌量測 系統,先以單眼數位相機配合雷射位移計驗證數位影像相關法於量測定量位移的 效果,再對圓環試片量測三點受壓時表面應變驗證數位影像相關法於二維全場量 測的能力,接著推導二維影像誤差與三維建構物差的相關性並嘗試以實驗驗證理 論的可信度,最終將數位影像相關法結合自動化元件建構單相機三維形貌量測系 統對物體量測。過去在進行立體的量測時,使用雙相機對物體同時進行量測,或以 反射鏡結合高速攝影機對振動問題進行量測,數位影像相關法的量測的範圍都受 到架設時所裝設的物品所限制。將工業相機結合自動化控制設備,使數位影像相關 法具有改變量測視角的可能性,配合建構三維點的理論誤差式,擴展數位影像相關 法於應用於主動改善拍攝結果的潛力。
第一章 前言:
本章介紹本論文的研究動機以及相關文獻回顧與論文各章節的架構。
第二章 數位影像相關法與實驗儀器介紹:
本章介紹本論文使用的數位影像相關法技術的核心原理、次像素等級的搜尋 演算法、數位影像相關法量測種類與實驗量測時所使用的相關設備及量測儀器的 功能。
第四章 數位影像相關法於中空圓環的全場位儀與應變量測:
為驗證數位影像相關法於量測全場應變的能力,並配合實驗室對中空圓環的研 究課題,對中空圓環進行模擬分析及數位影像相關法應變及位移量測。試片於加壓 量測前,先以超音波探傷儀對材料參數進行量測,將材料參數代入 COMSOL 模擬 中空圓環於鋁製的施力架上以七公斤的荷重加壓,並與數位影像相關法的應變量 測結果進行比較。
第五章 建構數位影像相關法二維與三維誤差的相關性:
數位影像相關法在演算過程產生的誤差對實驗的可信度具有關鍵性的影響力,
實驗室所開發的量測系統尚未能有效驗證三維量測的誤差,於二維量測的誤差驗 證亦受到次像素模擬影像生成的數值誤差所干擾而尚未有定論。本章提出以幾何 關係為基礎推導的二維誤差與三維誤差關係式,並同時提出一套獲得標準次像素 位移影像的作業流程,將數位影像相關法於標準次像素位移影像進行追蹤確認數 位影像相關法於二維量測的誤差,並帶入關係式對三維量測結果進行比較與驗證,
最終提出一套工作程序可最佳化實驗架設。
第六章 應用數位影像相關法建構立體形貌:
第五章成功驗證數位影像相關法於二維的量測能力並推得二、三維間的誤差 關係式,本章將數位影像相關法結合自動化控制元件,建構單相機立體形貌量測系 統,將數位影像相關法以一台相機結合自動化控制元件,於不同視角對不等直徑圓 管及貝多芬石膏像進行三維形貌量測。
第七章 結論與未來展望:
將本論文的研究論文加以整理。並提出本論文相關研究問題的延伸方向及改 善目標。
第二章 數位影像相關法及實驗儀器介紹
本章介紹數位影像相關法的基本原理及本論文所使用的實驗儀器,首先介紹數 位影像相關法的核心運作原理,再說明使數位影像相關法得以達到次像素精度的 進階搜尋演算法,並介紹數位影像相關法量測的種類,最終介紹本論文所使用的相 關儀器及設備功能。
2.1 數位影像相關法(DIC)簡介 2.1.1 基本原理
數位影像相關法(Digital Image Correlation, DIC)是一種對數位影像的像素灰階 (Gray scale)值進行提取,透過數個運算步驟獲得位移與變形量資訊的一種演算方 式,具有全域、非接觸的量測特性,且在實務操作上架設簡便,相對於電子斑點干 涉術(ESPI)使用雷射作為光源,數位影像相關法無需使用特殊光源也能達到量測效 果,透過變換鏡頭更可以達到跨尺度量測的效果。數位影像相關法的演算方式為比 較連續影像的中的灰階值資訊,利用灰階值資訊的相似度對待測物表面進行搜尋,
獲得每個影像下的全場位移與變形。
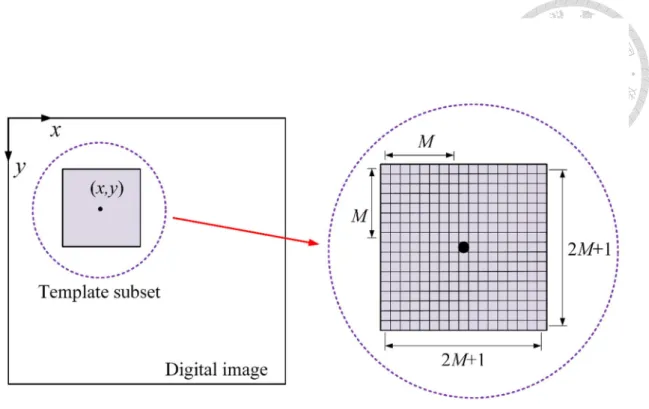
為描述待測物表面上的點,以目標像素點位置
( )
x y, 為中心取出樣板子集合(Template Subset),樣板子集合為正方型區域,區域的邊長為
(
2M + ´1) (
2M +1)
,其中 M 稱為半窗格(Half-window),其示意圖為圖 2- 1。樣板子集合所代表的意義 為以目標點為中心的特徵,依據不同的問題以及不同的特徵可選用不同的半窗格 數值進行計算以獲得最佳的效果。
然而待測物表面不見得存在適合進行演算的特徵,目前主要可透過四種人工 添加的方式將特徵製作於待測物表面上,分別為噴漆點、網版印刷、書寫文字、特 徵點貼紙,都能夠有效在物體表面產生可追蹤的特徵,圖 2- 2 為四種添加的特徵。
圖 2- 3 以實際操作來解釋數位影像相關法進行影像追蹤的過程,使用一組記錄待 測物變形的連續影像,從左圖進行到右側圖片為時間軸,方框區塊為樣板子集合,
2.1.2 相關係數
連續影像中的追蹤目標區域稱為搜尋子集合(Search subset),在演算的過程中 與樣板子集合進行比較匹配。數位影像相關法使用相關係數做為樣板子集合與搜 尋子集合間匹配程度的量化數值,可表示樣板子集合與搜尋子集合間的匹配程度,
過往的文獻上有許多不同相關係數的計算標準,主要可分為交叉相關法(Cross- correlation, CC)與總平方差(Sum of square difference, SSD)兩大類,設總數為 N 個的 樣板子集合T=
[
t t1, ,...,2 tN]
與搜尋子集合S=[
s s1, 2,...,sN]
,將不同種類相關係數公 式整理如表 2- 1 與表 2- 2 所示,其中1 1
1 1
,
N N
m i m i
i i
t t s s
N = N =
=
å
=å
2 2
1 1
,
N N
i i
i i
t t s s
= =
=
å
=å
(2.1)( )
2( )
21 1
,
N N
i m i m
i i
t t t s s s
= =
D =
å
- D =å
-Pan[23]等人對兩種方法間的關聯性曾經進行討論,其關係式可寫成
( )
SSD 2 1 CC
C = -C
( )
NSSD 2 1 NCC
C = -C (2.2)
( )
ZNSSD 2 1 ZNCC
C = -C
在考慮影像受到外界光線影響,樣板子集合及特徵子集合間的亮度具有一階及零 階的改變,使用零正規化(Zero-normalized)的相關係數計算方式可以降低背景亮度 不均勻所產生的追蹤影響。
2.1.3 形狀函數
2.1.2 中所說明的流程只能求出樣板子集合在變形前後影像資訊的平均位移,
而大部分工程應用的變形場極為複雜,尤其是在大應變產生時,試片表面會顯示拉 伸、壓縮、剪切與旋轉等變形狀態,為了因應不同的實驗情況與變形狀態,在進行 影像搜尋前必須先對樣板子集合做形狀函數(Shape function)的假設。目前常見的位 移假設有四種,分別為剛體平移、剛體旋轉、一階變形與二階變形假設,本論文使 用的位移假設則包含剛體平移及一階變形。
剛體平移可稱為零階變形,位移假設適用於追蹤目標的變形量極小且位移量 大的待測物,利如機器手臂運動軌跡追蹤。圖 2- 6 為剛體平移假設的示意圖,樣 板子集合的中心座標為
( )
x y, ,Q 為樣板子集合中的點,Q 點的 x 方向距離中心點( )
x y, 為Dx,y 方向距離中心點( )
x y, 為 yD ,而Q*(
x y*, *)
為 Q 點剛體平移後的座 標位置,根據剛體平移的位移假設,則(
x y*, *)
可表示為*
*
x x u x y y v y
= + + D
= + + D (2.3)
其中 u 為 x 方向剛體位移量, v 為 y 方向剛體位移量。
一階變形假設適用於具有剛體平移且包含小變形的待測物,比如拉伸試驗試 片。樣板子集合的一階變形假設如圖 2- 7 所示,樣板子集合的中心座標為
( )
x y, ,Q 為樣板子集合中的點,Q 點的 x 方向距離中心點
( )
x y, 為Dx, y 方向距離中心點(
x y 為 y,)
D ,而Q*(
x y*, *)
為 Q 點一階變形後的座標位置,根據一階變形的位移假設[5],則Q*
(
x y*, *)
可表示為*
, ,
*
, ,
x y
x y
x x u u x x u y y y v v x v y y
= + + × D + D + × D
= + + × D + ×D + D (2.4)
其中 u 為 x 方向剛體位移量,v 為 y 方向剛體位移量,u,x為 u 在 x 方向一階偏導數,
u 為, y u 在y 方向一階偏導數,v 為,x v 在 x 方向一階偏導數,v 為,x v 在y 方向一階偏 導數。
2.2 搜尋演算法
2.1.2 中已說明數位影像相關法如何進行影像追蹤,但解析度局限於整數像素 (Integer pixel)上,若只有整數像素的精度是不足以應用在精密的工程量測上,影像 搜尋演算法必須達到次像素(Sub-pixel)等級的精度才能達到足夠的效能。本節接下 來詳細介紹四種次像素精度影像搜尋法,分別為相關係數極值搜尋法(CCPF)、牛 頓拉福森法(NR method)、正向疊加牛頓拉福森法(FA-NR method)與反向合成高斯 牛頓法(IC-GN method)。
2.2.1 相關係數極值搜尋法
相關係數極值搜尋法(Correlation coefficient peak-finding algorithm,CCPF) [33]
藉由正規化交差相關法得到相關係數最大值位置,可獲得整數像素解(Integer pixel solution),接著以係數極大值位置為中心,將鄰近八點取出形成大小為3 3´ 相關係 數次矩陣(Correlation coefficient sub-matrix )。演算法利用二元二次多項式描述的曲 面進行擬合,擬合的結果可獲得次相關係數矩陣,於擬合式對空間微分為零處可得 相關係數極值的次像素解(Sub-pixel solution),最後將整數像素解加上次像素解得 到總解(Total solution)。如圖 2- 8 所示, f 為參考影像灰階矩陣, g 為變形影像灰 階矩陣, T 為參考影像中的樣板子集合,其中心點為
(
x y0, 0)
,假設 T 的中心點在 變形影像中移動到末位置(
x y*, *)
,S為變形影像中任意的搜尋子集合,T 與S的集 合數量各為N ,使用正規化交叉相關法(NCC)作為相關係數公式1 N
i i NCC
i
C t s
= t s
= ×
å
× (2.5)接著樣板子集合 T 對變形影像做相關係數運算得到相關係數場,如圖 2- 9 所示,
1 3 4
2 5 4
2 0
2 0
NCC
NCC
C a a x a y x
C a a y a x y
¶ = + + =
¶
¶ = + + =
¶
(2.7)
即可求出次像素位移
1 5 2 4 2
4 3 5
2 3 1 4 2
4 3 5
2 4 2
4
s
s
a a a a x a a a
a a a a y
a a a
= - -
= - -
(2.8)
則樣板子集合 T 在變形影像的末位置
*
*
i s
i s
x x x y y y
= +
= + (2.9)
則樣板子集合 T 的總位移量為
* 0
* 0
u x x v y y
= +
= + (2.10)
相關係數極值搜尋法計算簡單、快速,適合應用於即實影像分機中,可快速計算出 次像素位移,但是計算中並沒有考慮樣板子影像可能具有旋轉、變形等參數,因此 在影像產生旋轉、變形時會有追蹤上的誤差,相較於疊代搜尋演算法其精度較低。
2.2.2 牛頓拉福森法
牛頓拉福森法(Newton-Raphson method, NR method) [8,9]是引入疊代與形狀函 數的一種運算方法,可求得參考影像中樣板子集合在變形後影像的位移場,如圖 2- 10 所示, f 為參考影像灰階矩陣, g 為變形影像灰階矩陣,在參考影像 f 中取出 大小為
(
2M+ ´1) (
2M+1)
樣板子集合,其中心座標為( )
x y, ,先猜測一組位移參數0 0 0, 0, 0 0, 0,
T
x y x y
P% = ëéu u u v v v ùû ,使用一階變形假設得到樣板子集合末位置 猜值,則樣板子集合上的 Q 點距離中心座標
(
D Dx, y)
,在變形後的末位置Q 座標可*以寫成
*
0 0,x 0,y
x = +x u +u × D + D +x x u × Dy
(2.11)
數公式使用零正規化總平方差,參考表 2- 2 與式(2.1)得到
(
,) ( *, *)
2
M M
ZNSSD
x M y M
g x y g f x x y y f
C D =- D =- f g
é + D + D - - ù
ê ú
= -
ê D D ú
ë û
å å
(2.12)設樣板子集合真實存在的一階變形參數為P% = ëéu u,x u,y v v,x v,yùûT,將相關 係數對初始猜值P0
% 做一階泰勒級數展開得到
( )
0( )(
0 0)
. .ZNSSD ZNSSD ZNSSD
C =C P + ÑC P P-P +H O T
% % % % (2.13)
其中H OT. . 為高階項,令D = -P P P0
% % % ,並將(2.13)式改寫成
( )
6( )
0 01
ZNSSD
ZNSSD ZNSSD m
m m
C P
C C P P
= P
= + ¶ ×D
å
¶ %% (2.14)
其中D = DP% éë u Du,x Du,y Dv Dv,x Dv,yùûT,為求初始猜值P0
% 與真實解 P
% 間的 差值 PD
% ,將式(2.14)對 P
% 做偏微分並令其等於零,得到
( )
0 6 2( )
0 10 ZNSSD ZNSSD
ZNSSD
m
n n m m n
C P C P
C P
P P = P P
¶ ¶
¶ = = + ×D
¶ ¶ %
å
¶ ¶ % (2.15)其中
( )
0 M M 2(
,) (
*, *) (
*, *)
ZNSSD
n x M y M n
g x y g g x y
C P f x x y y f
P D =- D =- g f g P
é - ù é ¶ ù
¶ = ê + D + D - - ú ê× - ú
ê ú ê ú
¶ D D D ¶
ë û ë û
å å
%
(2.16) 與
( ) (
* *) (
* *)
2
0
2
, ,
M M 2
ZNSSD
m n x M y M m n
g x y g x y
C P
P P D =- D =- g P P
é¶ ù é¶ ù
¶ = ê ú ê× ú
ê ú ê ú
¶ ¶ %
å å
D ë ¶ û ë ¶ û可大幅度減少牛頓拉福森法的計算時間。最後再將式子改寫成矩陣形式得到
( )
00= ÑCZNSSD P + × DH P
% %
% (2.19)
則式(2.19)移項後可以得到初猜值P0
% 與真實解 P
% 的差值 PD
%
( )
1
0 ZNSSD
P g - C P
D = D ×H ×Ñ
% % (2.20)
其中ÑCZNSSD
( )
P0% 為相關係數對一階變形參數的梯度,將其展開可以寫成
( )
( ) ( ) ( ) ( ) ( ) ( )
0
0 0 0 0 0 0
1 2 3 4 5 6
ZNSSD
T
ZNSSD ZNSSD ZNSSD ZNSSD ZNSSD ZNSSD
C P
C P C P C P C P C P C P
P P P P P P
Ñ =
é¶ ¶ ¶ ¶ ¶ ¶ ù
ê ¶ ¶ ¶ ¶ ¶ ¶ ú
ë û
%
% % % % % %
(2.21) H 為海森矩陣,並將CZNSSD簡寫成C,則 H 展開可以寫成
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
2 2 2 2 2 2
0 0 0 0 0 0
1 1 1 2 1 3 1 4 1 5 1 6
2 2 2 2 2 2
0 0 0 0 0 0
2 1 2 2 2 3 2 4 2 5 2 6
2 2 2 2 2
0 0 0 0 0
3 1 3 2 3 3 3 4
C P C P C P C P C P C P
P P P P P P P P P P P P
C P C P C P C P C P C P
P P P P P P P P P P P P
C P C P C P C P C P
P P P P P P P P
¶ ¶ ¶ ¶ ¶ ¶
¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶
¶ ¶ ¶ ¶ ¶ ¶
¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶
¶ ¶ ¶ ¶ ¶
¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶
= H
% % % % % %
% % % % % %
% % % % %
( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
2 0
3 5 3 6
2 2 2
2 2 2
0 0
0 0 0
4 3 4 5
4 1 4 2 4 4
2 2 2 2 2
0 0 0 0 0
5 1 5 2 5 3 5 4 5 5
2 2 2 2 2
0 0 0 0 0
6 1 6 2 6 3 6 4 6 5
C P P P P P
C P C P
C P C P C P
P P P P
P P P P P P
C P C P C P C P C P
P P P P P P P P P P
C P C P C P C P C P
P P P P P P P P P P
¶
¶ ¶ ¶ ¶
¶ ¶ ¶
¶ ¶ ¶
¶ ¶ ¶ ¶
¶ ¶ ¶ ¶ ¶ ¶
¶ ¶ ¶ ¶ ¶
¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶
¶ ¶ ¶ ¶ ¶
¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶ ¶
%
% %
% % %
% % % % %
% % % % %
( ) ( ) ( )
0 4 6 2
0 5 6 2
0 6 6
C P P P C P P P C P P P
é ù
ê ú
ê ú
ê ú
ê ú
ê ú
ê ú
ê ú
ê ú
ê ú
ê ú
ê ú
ê ¶ ¶ ú
ê ú
ê ¶ ú
ê ¶ ¶ ú
ê ú
ê ¶ ú
ê ú
ê ¶ ¶ ú
ë û
%
%
%
(2.22)
假設第k次的猜值為Pk
% ,使用牛頓拉福森法求出與真實解的差值DPk
% ,則第k+1次 猜值
1
k k k
P+ =P + DP
% % % (2.23)
圖 2- 11 為牛頓拉福森法的詳細疊代流程,每次的疊代中相關係數對一階變形參數 梯度ÑCZNSSD
( )
P0% 與海森矩陣 H 必須重新計算,再計算效率上較讓人詬病。