行政院國家科學委員會專題研究計畫 成果報告
以 GPS 觀測量進行低軌衛星精密軌道測定之研究(3/3)
計畫類別: 個別型計畫
計畫編號: NSC92-2211-E-006-071-
執行期間: 92 年 08 月 01 日至 93 年 07 月 31 日 執行單位: 國立成功大學測量工程學系(所)
計畫主持人: 楊名 計畫參與人員: 唐進賢
報告類型: 完整報告
報告附件: 出席國際會議研究心得報告及發表論文 處理方式: 本計畫可公開查詢
中 華 民 國 93 年 11 月 1 日
行政院國家科學委員會補助專題研究計畫▓ 成 果 報 告
□期中進度報告
以 GPS 觀測量進行低軌衛星精密軌道測定之研究(3/3)
計畫類別:▓ 個別型計畫 □ 整合型計畫 計畫編號:NSC 92-2211-E-006-071-
執行期間:92 年 08 月 01 日至 93 年 07 月 31 日
計畫主持人:楊名 計畫參與人員:唐進賢
成果報告類型(依經費核定清單規定繳交):□精簡報告 ▓完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
▓出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
執行單位:國立成功大學測量及空間資訊學系
中 華 民 國 九 十 三 年 十 月 二 十 九 日
目 錄
目錄………I 表目錄………..IV 圖目錄………...V
第一章 緒論………..1
1.1 前言………1
1.2 文獻回顧………2
1.3 任務與挑戰………4
1.4 研究動機與方法………..5
第二章 低軌衛星-CHAMP 衛星與中華衛星三號……….7
2.1 CHAMP 衛星………..7
2.2 中華衛星三號………..10
第三章 GPS觀測資料模式與觀測資料改正模式………13
3.1 觀測量模式………..13
3.2 對流層改正模式………..15
3.3 固體潮改正………..15
3.3.1 平衡潮和固體潮………..16
3.3.2 固體潮改正量的計算………..17
3.3.3 太陽與月球位置的計算………..19
3.4 質量中心之改正………..21
3.5 天線相位中心改正及地球旋轉改正………..23
3.5.1 地球旋轉改正………..23
3.5.2 天線相位中心改正……….24
第四章 低軌衛星受力模式與經驗模式………25
4.1 二體問題………..25
4.2 衛星擾動力………..26
4.2.1 地球非球體擾動………..28
4.2.2 多體擾動………..28
4.2.3 固體潮擾動………...29
4.2.4 海潮擾動………...29
4.2.5 大氣阻力擾動………..29
4.3 數值積分器………..32
4.4 經驗參數………..33
第五章 變分方程式之處理………35
第六章 研究設計與成果分析………39
6.1 動態估計………..39
6.1.1 資料來源………..39
6.1.2 實驗流程………...41
6.1.3 實驗設計………...42
6.1.4 研究成果與分析………...44
6.1.4.1 內在精度檢核………..44
6.1.4.2 外在精度檢核………..48
6.2 模擬估計動力參數………..58
6.2.1 實驗設計………..59
6.2.2 實驗成果與分析………..59
第七章 結論………65
參考文獻………..67
附錄A 研究開發之程式說明……….71
附錄B 出席國際學術會議心得報告……….73
表 目 錄
表 2-1 CHAMP 衛星軌道參數………..9 表 4-1 中心力與各種擾動力對不同高度衛星之加速度影響………..27 表 4-2 Colombo 經驗參數類型與特性………34 表6-1 弧長240分鐘軌道涵蓋時間……….43 表6-2 弧長100分鐘軌道涵蓋時間……….44 表 6-3 100 分鐘軌道弧段重疊軌道比較表(使用 GPS 預估星曆)……46 表 6-4 100 分鐘軌道弧段重疊軌道比較表(使用 GPS 精密星曆)……47 表 6-5 240 分鐘軌道弧段重疊軌道比較表(使用 GPS 預估星曆)……48 表 6-6 240 分鐘軌道弧段重疊軌道比較表(使用 GPS 精密星曆)……48 表 6-7 100 分鐘軌道弧段與 PSO 較差之 RMS 值(使用 GPS 預估星 曆)………52 表 6-8 100 分鐘軌道弧段與 PSO 較差之 RMS 值(使用 GPS 精密星 曆)………53 表 6-9 240 分鐘軌道弧段與 PSO 較差之 RMS 值(使用 GPS 預估星 曆)………57 表 6-10 240 分軌道弧段與 PSO 較差之 RMS 值(使用 GPS 精密星 曆)………57 表 6-11 研究中使用之力學模式與參數………58 表 6-12 43 個弧段三分量之 RMS 值(±cm)………64
圖 目 錄
圖 2-1 CHAMP 衛星設計圖………...8
圖 2-2 GPS 掩星技術示意圖……….9
圖2-3 華衛三號簡圖………...10
圖3-1 低軌衛星三次差分示意圖………...13
圖3-2 平衡潮和固體潮對地表影響之示意圖………...16
圖3-3 GPS衛星主體固定坐標系之三軸的示意圖………22
圖4-1 衛星受力示意圖………...32
圖6-1 本研究中採用的40個IGS追踨站之分佈情形………40
圖6-2 以動態法計算CHAMP短弧軌道之實驗流程圖……….41
圖6-3 Arc1-2動態法軌道與PSO較差圖(使用GPS預估星曆)………...49
圖6-4 Arc1-2動態法軌道與PSO較差圖(使用GPS精密星曆)………...49
圖 6-5 Arc1-4 動態法軌道與 PSO 較差圖(使用 GPS 預估星曆)……..50
圖 6-6 Arc1-4 動態法軌道與 PSO 較差圖(使用 GPS 精密星曆)……..50
圖 6-7 Arc1-13 動態法軌道與 PSO 較差圖(使用 GPS 預估星曆)……..50
圖 6-8 Arc1-13 動態法軌道與 PSO 較差圖(使用 GPS 精密星曆)……..50
圖 6-9 Arc1-19 動態法軌道與 PSO 較差圖(使用 GPS 預估星曆)……..51
圖 6-10 Arc1-19 動態法軌道與 PSO 較差圖(使用 GPS 精密星曆)……51
圖 6-11 Arc1-23 動態法軌道與 PSO 較差圖(使用 GPS 預估星曆)…….51
圖 6-12 Arc1-23 動態法軌道與 PSO 較差圖(使用 GPS 精密星曆)……51
圖 6-13 Arc2-4 動態法軌道與 PSO 較差圖(使用 GPS 預估星曆)……..55
圖 6-14 Arc2-4 動態法軌道與 PSO 較差圖(使用 GPS 精密星曆)……..55
圖 6-15 Arc2-7 動態法軌道與 PSO 較差圖(使用 GPS 預估星曆)……..55 圖 6-16 Arc2-7 動態法軌道與 PSO 較差圖(使用 GPS 精密星曆)……..55 圖 6-17 Arc2-10 動態法軌道與 PSO 較差圖(使用 GPS 預估星曆)……56 圖 6-18 Arc2-10 動態法軌道與 PSO 較差圖(使用 GPS 精密星曆)……56 圖 6-19 Arc2-12 動態法軌道與 PSO 較差圖(使用 GPS 預估星曆)……56 圖 6-20 Arc2-12 動態法軌道與 PSO 較差圖(使用 GPS 精密星曆)……56 圖 6-21 實驗流程………59 圖 6-22 弧段 1 參數估計前後軌道誤差(藍線為積分軌道與 PSO 之 差,紅線為平差後與 PSO 之差)………..60 圖 6-23 弧段 2 參數估計前後軌道誤差(藍線為積分軌道與 PSO 之 差,紅線為平差後與 PSO 之差)………..60 圖 6-24 弧段 3 參數估計前後軌道誤差(藍線為積分軌道與 PSO 之 差,紅線為平差後與 PSO 之差)………..61 圖 6-25 弧段 12 參數估計前後軌道誤差(藍線為積分軌道與 PSO 之 差,紅線為平差後與 PSO 之差)………..61 圖 6-26 弧段 13 參數估計前後軌道誤差(藍線為積分軌道與 PSO 之 差,紅線為平差後與 PSO 之差)………..61 圖 6-27 弧段 14 參數估計前後軌道誤差(藍線為積分軌道與 PSO 之 差,紅線為平差後與 PSO 之差)………..61 圖 6-28 弧段 23 參數估計前後軌道誤差(藍線為積分軌道與 PSO 之 差,紅線為平差後與 PSO 之差)………..62 圖 6-29 弧段 24 參數估計前後軌道誤差(藍線為積分軌道與 PSO 之 差,紅線為平差後與 PSO 之差)………..62 圖 6-30 弧段 25 參數估計前後軌道誤差(藍線為積分軌道與 PSO 之 差,紅線為平差後與 PSO 之差)………..62 圖 6-31 弧段 34 參數估計前後軌道誤差(藍線為積分軌道與 PSO 之 差,紅線為平差後與 PSO 之差)………..62
圖 6-32 弧段 35 參數估計前後軌道誤差(藍線為積分軌道與 PSO 之 差,紅線為平差後與 PSO 之差)………..63 圖 6-33 弧段 36 參數估計前後軌道誤差(藍線為積分軌道與 PSO 之 差,紅線為平差後與 PSO 之差)………63 圖6-34連續三天積分軌道改善後與PSO之殘差圖………...63
第一章 緒論 1.1 前言
衛星軌道高度距離地球表面 300 至 1500 公里範圍間的衛星通常 稱之為低軌衛星(low-earth orbit, LEO)(Montenbruck and Gill,
2001),由於這類的衛星可藉由掩星技術(ratio occultation technique)
以獲得重要的大氣折射觀測資訊、對於地球重力場有著高度敏銳度、
位於極佳的地磁觀測區間、若配合軌道傾角的設計可以有著極高的地 表涵蓋率,以及較低的發展成本,因此以低軌衛星進行大氣科學、地 球科學、大地科學、通訊、遙測等科學研究或是提升生活品質之應用 已漸趨於頻繁。而自從 1991 年起美國太空總署(National Aeronautics and Space Administration, NASA)以全球定位系統(Global Positioning System, GPS)進行衛星追蹤技術(satellite to satellite tracking, SST)
以來,先後利用 LANDSAT 和 TOPEX/POSEIDON 衛星進行實驗,雖 然當年並未獲得極佳的成果,但隨著 GPS 觀測技術與演算法的精進,
該項技術已逐漸突破限制展露其科學應用價值,因此也漸漸成為各國 太空計畫的發展趨勢,例如 2000 年德國發射的 CHAMP(CHAllenging Minisatellite Payload)衛星、2002 年美國與德國合作發射的 GRACE
(Gravity Recovery And Climate Experiment)雙星計畫、2002 年美國 發射的 ITS-S0 衛星、2002 年俄羅斯發射的 Mozhaets 衛星、2003 年 美國發射的 ICESAT 衛星、2004 年美國發射的 Gravity Probe B 衛星 以及我國預計 2005 年發射的中華衛星三號衛星群。
低軌衛星軌道不僅是各項科學研究之基礎需求,更與各項科學 研究息息相關,例如低軌衛星的軌道軌道變化經常反應其受地球重力 場影響情況,以及解算軌道的同時一併求解大氣密度等參數。因此無 論是作為科學研究之用亦或是民生科技應用,衛星位置訊息是必要且 重要的資訊之一,國際間對於衛星定軌已投入相當的人力,物力與經 費並有卓越的成就,例如美國 NASA 所發展之 GEODYN-II 軟體,JPL
(Jet Propulsion Laboratory)發展之 GPS 軌道測定程式 GIPSY,美國 德州大學發展之 Utopia 程式,美國俄亥俄州大學發展之 Godiva 軟 體 , 瑞 士 伯 恩 大 學 發 展 之 Bernese 軟 體 , 以 及 由 歐 洲 太 空 總 署
(European Space Agency; ESA)所發展之 GPS 軌道測定程式等。國 內近十年亦積極發展太空計畫,從發射中華衛星一號、二號至預定明 年發射之三號衛星,對衛星軌道之要求亦逐漸提升其需求精度,並規 劃於三號衛星上酬載 GPS POD(precise orbit determination)天線進行 高精度軌道定軌。為順應太空研究之潮流並發展國內低軌衛星定軌研 究,本研究將致力於利用 GPS 觀測資料決定高精度之低軌衛星軌道。
1.2 文獻回顧
測定衛星軌道之方法目前可分為動力法(dynamic method)、動態 法(kinematic method)與簡動力法(reduced dynamic method)三種。
動力法是以衛星繞地運行所受到的各項作用力為基礎,若有能力 掌握各種作用力模式,則可將所有作用力對衛星造成的加速度進行積 分,一次積分可得衛星速度,二次積分後則可得位置資訊。然而各項 作用力的細節並無法完全正確掌握,且由於不同的衛星軌道特性、衛 星本體形狀和材質、太空環境與大氣環境的變異、地球自轉的不穩定 等因素,使得積分所得之軌道與衛星真實運行軌道之差異隨時間增加 而增加。若將上述各項不確定因素列為未知參數與衛星狀態一併求 解,以獲得該時段內精確的動力模式有助於提升衛星狀態的正確性,
此即動力法。動力法的優點為可同時處理各種形式的觀測量,且不同 型態觀測資料可為非同步觀測,由於結合大量可使用的觀測資料同時 估計衛星狀態與動力參數,在衛星受力模式考量完善、精確的情況 下,此法可獲得高精度的成果。然而其缺點為只能以後處理的方式行 之,而力學模式複雜、資料量龐大易造成處理時間冗長,且當力學模 式不完善時,所估計的衛星軌跡將無法反應真實軌道。
(Svehla and Rothacher, 2003)考量 CHAMP 衛星受地球重力場
EIGEN1S 模式(Reigber et al., 2002)、大氣阻力 MSISE-90 模式(Hedin, 1991; Doornbos et al., 2002)、太陽輻射壓、多體擾動、海潮和固體潮 等作用力,並分別以 GPS 零差分(zero-difference)與二次差分
(double-difference)觀測量同時估計 6 個起始狀態參數、9 個太陽輻 射壓係數、1 個大氣阻力係數,最後成果與獨立的衛星雷射測距
(Satellite Laser Ranging, SLR)相比較,利用零差分與二次差分觀測 量之動力法定位均可達到 4-5 公分。
動態法是利用載具上接收儀所接收到之 GPS 衛星瞬時訊號,依 其與 GPS 和追蹤站間相對幾何分布關係交會出該瞬間之載具位置,
而載具位置精度取決於 GPS 衛星群相對於待測定載具之相對幾何關 係、觀測量的數量和品質以及對觀測量誤差之處理(Byun and Schutz, 2001)。本法的優點在於無需了解衛星複雜的受力模式,因此相關的 時間系統與坐標系統可無須考慮,更免去常微分方程式積分的困擾,
僅需考慮觀測量所受到的誤差影響進行處理即可;缺點則為當觀測資 料品質不佳甚至無觀測資料時將無法有效估計衛星軌道。
(劉佾博,1999)利用中華衛星三號之實驗衛星 MicroLab-1 與 24 個地面追蹤站觀測資料組成二次差分虛擬距離與無電離層載波三 次差分觀測量,以動態法估計MicroLab-1 之衛星軌道。實驗結果顯 示其軌道之精度在 X、Y、Z 方向的三分量上,分別為 0.94、0.86、
1.14 公尺。(Svehla and Rothacher, 2003)則分別採用零差分與二次差 分之觀測資料各以動態和動力法解算低軌衛星 CHAMP 的軌道。零差 分觀測資料需要高精度的 GPS 衛星軌道與時錶資訊;二次差分觀測 量則因為差分技術而將 GPS 軌道與時錶誤差約化,因此無需高精度 先驗資訊,且藉由寬巷和無電離層線性組合可約化電離層延遲影響,
配合高精度的電碼觀測量,二次差週波未定值(ambiguity)可有效地 被約制為整數。成果與獨立的衛星雷射測距相比較,利用零差分與二 次差分觀測量之動態定位分別可達到 11-12 公分與 5-6 公分。
簡動力法意指簡化的動力法,實務上則是結合動力法的力學模式 與動態法的幾何關係相輔相成決定衛星位置。由於動力法中對於衛星 所受的力學模式要求甚高,當力學模式因太複雜而考慮不完善時,例 如低軌衛星受到大氣阻力的影響,以動力法決定之衛星軌道精度將大 受影響。因此簡動力法採濾波估計模式,模式中加入額外的未知參數 於動力方程式中,藉此降低力學模式的強度,透過此類參數的調控使 得濾波估計可調整來自力學模式或是幾何模式的權重比例。此種綜合 動力與動態法的估計軌道方式適用於衛星軌道高度離地表 400 至 2000 公里之衛星,由於其所受之大氣影響特別顯著,因此以該法所 獲得之軌道精度將優於以纯動態或纯動力法所得之成果(Yunck et al., 1990; Wu et al., 1991)。
1. 3 任務與挑戰
本研究主要的任務即在於以 GPS 觀測資料決定高精度之低軌衛 星軌道,然而對於負有大氣任務的低軌衛星而言,近即時(near real-time)地決定軌道亦是任務的需求之一,因此快速地解算以獲得 軌道資訊是本研究的任務之一。此外,雖然對於大氣任務而言,軌道 精度要求約在 1 公尺等級就以足夠,但是對於大地任務而言,則需要 10 公分等級左右的軌道精度,因此如何利用 GPS 觀測資料決定高精 度衛星軌道則是本研究的任務之二。
如同前述,由於低軌衛星運行軌道仍被大氣層所包覆,因此衛星 運動軌道深受大氣阻力的影響,但由於大氣結構複雜,各種大氣分子 與衛星本體表面材質之相互作用不易估計,且大氣溫度隨太陽通量
(solar flux)、地磁活動和時間而改變,使得大氣密度之估計更加不 易,雖然已有學者提出各種大氣密度模式,但仍與真實情況有不小的 差異,最後則是衛星本體之幾何形狀若不是規則型體,將使得大氣阻 力更難以掌握。如何有效地估計大氣阻力所造成的影響並予以克服將 是本研究的挑戰之一。
低軌衛星為一高度 300 至 1500 公里的高速載具,藉由接收高軌 道的 GPS 衛星訊號進行定位,若使用零差分觀測資料直接進行定位,
觀測量中的各項誤差(例如 GPS 衛星與接收儀時錶誤差)將無法有 效地被約化,而其與週波未定值和衛星位置均為高相關,如何在各參 數具有高度相關的情況下估計出其影響量而進一步估計軌道參數將 是另一項挑戰。若是將低軌衛星觀測資料與地面追蹤站產生差分觀測 資料(包括一次差分、二次差分或三次差分),雖然可以消除 GPS 衛 星時錶誤差、電離層延遲誤差等,但地面追蹤站觀測資料受到對流層 延遲影響,而低軌衛星則不受影響,因此雖然經過差分處理,此一延 遲量並不會被消除,如何消除追蹤站觀測資料中對流層延遲所造成的 延遲將是資料處理上的挑戰。
利用 GPS 進行定位時必須先獲得 GPS 精確的位置亦即星曆資 料,然而國際 GPS 服務地球動力學組織(International GPS Service, IGS)所提供的最後精密星曆需等待二至三週方能獲得,雖然 IGS 亦 提供快速之預估星曆,但部份衛星之時錶資訊卻發生漏失導致無法使 用。同樣地,利用差分觀測資料時地面追蹤站之坐標亦須為已知之訊 息,雖然可利用國際地球旋轉與參考系統服務組織(International Earth Rotation and Reference Systems Service, IERS)公告之國際大地參考框 架(International Terrestrial Reference Frame, ITRF)中追蹤站坐標與 速度推演而獲得,但此一推算坐標仍隱含誤差在內。現階段常用的解 決方式為將可獲得之衛星與地面追蹤站坐標和速度視為先驗資訊且 於觀測方程式中一併解算,由於此法將增加大量方程式數目,如何有 效地、快速地且合理地同時解算此兩類坐標值為另一項挑戰。
1. 4 研究動機與方法
國內近十餘年積極發展太空科技,並由國家太空計畫室(National Space Program Office, NSPO)負責研究發展。繼中華衛星一號、二號 分別於 1999 與 2004 年成功發射之後,中華衛星三號亦將預定於 2005
年發射。中華衛星三號為六顆衛星所組成之衛星群,研究方向主要為 大氣參數反演與全球氣象預估與分析、電離層電子密度分佈情形以及 利用衛星高度變化進而偵測地球重力場的時變。前述第三項研究主軸 需要高精度衛星軌道資訊,為因應此項研究所需,該衛星群酬載高精 度 GPS 天線以接收 GPS 衛星訊號進行定軌。對研究以 GPS 觀測量進 行低軌衛星高精度定軌之研究技術而言,雖然國際間已經有相當豐富 的經驗與研究成果,但對於我國而言卻是第一次研發。向相關研究成 果借鏡以建立國內高精度低軌衛星定軌程式,除了為國內太空科技發 展進一份心力並滿足中華衛星三號相關研究所需,對於未來國內太空 科技發展亦奠定研究基礎。
為了獲得高精度之低軌衛星軌道,從文獻中可得知,雖然利用動 力或是動態法均可獲得不錯的成果,但由於受到大氣影響以及 GPS 訊號品質與幾何分佈的考量,均無法獲得穩定的成果,而簡動力法則 可分別取兩者之優點以彌補分別使用纯動力或是纯動態之缺陷。本研 究將先以純動態的方式解算低軌衛星軌道,利用 40 至 50 個地面追蹤 站與低軌衛星組成之差分觀測量,經過必要之誤差改正之後,以其所 建構之幾何關係決定低軌衛星軌道。後續則以軌道運動方程式積分獲 得低軌衛星軌道,並以已知的低軌衛星軌道模擬為期觀測量估計各動 力參數,此實驗之目的在於評估衛星擾動力之影響以及各參數求解成 果。本研究雖未完成以簡動力法決定低軌衛星軌道,但已指出以動態 法決定之低軌衛星軌道精度並模擬動力法可能達到的軌道精度。
第二章 低軌衛星-CHAMP 衛星與中華衛星三號
近幾年來,以低軌衛星進行各項科學研究成為一種趨勢,如德國 研發的 CHAMP 衛星(高度約 453 公里)以及由台灣、美國合作的中 華衛星三號(高度約 800 公里)。CHAMP 衛星已於 2000 年 7 月順利 發射升空,主要任務包括研究地球重力場、地球磁場時空變化及探測 地球大氣層和電離層中的溫度、壓力、水氣含量與電子分佈,為氣象 預報提供更多的資料(GFZ Homepage)。中華衛星三號計劃是由國家 太空計劃室與美國大學氣象研究中心(NCAR/UCAR)共同合作之衛 星計劃,該計畫預計於 2005 年發射六顆低軌衛星,主要從事大氣科 學研究,藉由收到之掩星訊號推算近即時氣象狀況,在二至三小時內 提供第一手全球數值天氣預測資料及太空天氣(space weather)預報 的基本資料(侯瓔瑞,2001)。
2.1 CHAMP 衛星
CHAMP 衛星是由德國 GFZ(GeoForschungsZentrum Potsdam)
所研發之低軌衛星,於 2000 年 7 月順利發射升空,軌道高度約為 450 公里,繞地運行一週約 93 分鐘。CHAMP 衛星之生命週期為五年,
主要任務如下:
1. 求解高精度全球靜態地球重力場長波長特徵和重力場梯度變化。
2. 估計地球磁場及其時空變化。
3. 利用散佈全球之掩星技術觀測資料,研究大氣溫度、壓力與密度 等大氣參數以進行氣候變遷之分析及天氣預報等。
為了滿足重力場任務需求,在 CHAMP 衛星上裝載三軸加速度計
(Accelerometer)與衛星感測器(Star Sensor)。加速度計能測定大氣 阻力、大陽輻射壓等對 CHAMP 衛星所產生的非保守力加速度;而衛 星感測器則可測定衛星的非重力加速度,以減低非保守力的影響,更 能準確求定地球重力場。此外,CHAMP 衛星另外附載多種精密儀
器,包括:磁力計(Fluxgate Magnetometer)、雷射反射器(Laser Retro Reflector)及離子漂流計(Ion Drift Meter)等。圖 2-1 為 CHAMP 衛 星的設計圖。
在大氣監測方面,CHAMP 衛星載有 GPS 雙頻接收器,除了可用 於精密定軌外,還可以利用 GPS 掩星技術反演大氣參數、分析及天 氣預報。當 GPS 訊號通過地球大氣層時會產生彎曲的效應,再被 CHAMP 衛星接收,此效應會在傳播路徑上造成訊號頻率產生變化,
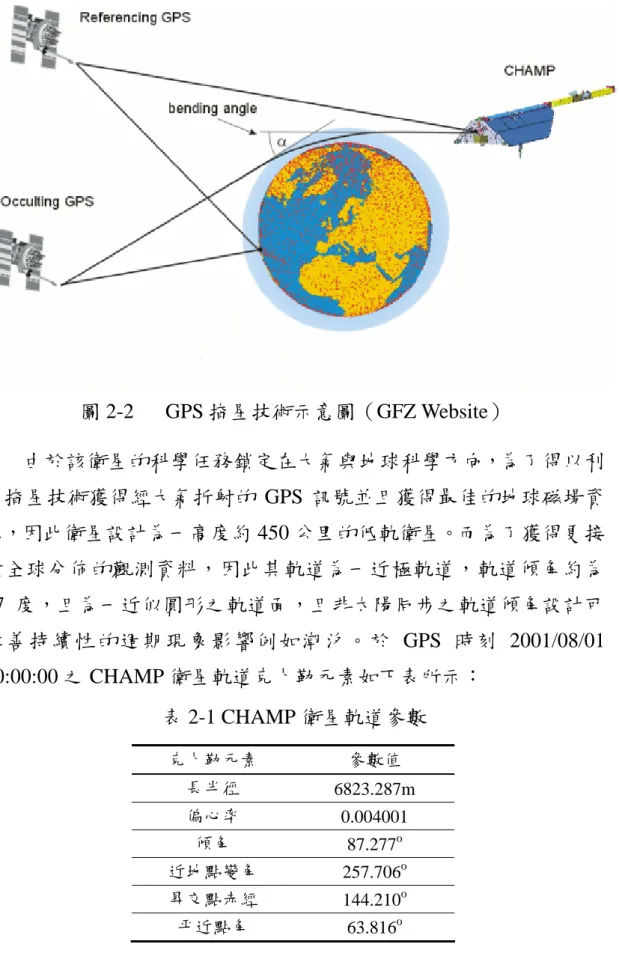
此即為掩星技術。若 GPS 和 CHAMP 衛星軌道可以精確地知道,便 可以精確量測出在傳播路徑上造成之都卜勒頻移,再利用都卜勒頻移 進一步推求出電離層電子含量、大氣密度、大氣折射系數、大氣溫度 與壓力剖面(參考圖 2-2)。
圖 2-1 CHAMP 衛星設計圖(GFZ Website)
圖 2-2 GPS 掩星技術示意圖(GFZ Website)
由於該衛星的科學任務鎖定在大氣與地球科學方向,為了得以利 用掩星技術獲得經大氣折射的 GPS 訊號並且獲得最佳的地球磁場資 訊,因此衛星設計為一高度約 450 公里的低軌衛星。而為了獲得更接 近全球分佈的觀測資料,因此其軌道為一近極軌道,軌道傾角約為 87 度,且為一近似圓形之軌道面,且非太陽同步之軌道傾角設計可 改善持續性的週期現象影響例如潮汐。於 GPS 時刻 2001/08/01 00:00:00 之 CHAMP 衛星軌道克卜勒元素如下表所示:
表 2-1 CHAMP 衛星軌道參數
克卜勒元素 參數值
長半徑 6823.287m 偏心率 0.004001
傾角 87.277o
近地點變角 257.706o 昇交點赤經 144.210o 平近點角 63.816o
2.2 中華衛星三號
中華衛星三號是中美雙邊合作之太空計畫,計畫目的在於建立全 球大氣即時觀測網之技術,因此又稱為氣象、電離層及氣候衛星星系 觀測系統(Constellation Observing System for Meteorology, Ionosphere and Climate)簡稱 ROCSAT-3/COSMIC 計畫(Lee, 2001)。本計劃預 定於 2005 年秋季發射火箭同時承載六顆微衛星進入太空,並陸續分 離與調整入軌。任務軌道設定在距地球表面 750 至 800 公里的高空,
且為一圓形軌道,六顆衛星將分佈於六個軌道面,每個軌道面之赤經 夾角為 24 度,軌道傾角為 72 度。每顆衛星含燃料約重 70 公斤,
外型呈扁平圓柱狀,直徑約 103 公分,高約 16 公分,有兩片圓形太 陽能板分佈於同一平面,分別展開 121 度及 59 度,衛星形狀可見圖 2-3。六顆衛星組成低軌道微衛星系統接收由美國 GPS 衛星所發出之 訊號,觀測範圍涵蓋全球大氣層及電離層,每天提供全球平均 2600 點的觀測資料值,這些觀測點均勻分佈於全球,其資料約每九十分鐘 更新一次(太空計畫室,2003)。
圖2-3 華衛三號簡圖
ROCSAT-3/COSMIC酬載資料可提供以下科學研究(太空計畫 室,2003):
1. 三小時內提供溫度、氣壓、濕度及降雨量等全球觀測資料。
2. 局部地區性之大雨預報研究,包括臺灣地區之梅雨鋒面研究。
3. 提供颱風溫度、氣壓、水氣分佈資料,以及颱風路徑和降雨模式等 預報研究。
4. 全球和區域性數值天氣預報研究。
5. 在三十天內提供全球氣候變遷資料。
6. 有關季風之水氣分佈和傳輸、季節變化、年度氣候變化等研究。
7. 在二小時內提供全球電離層電子密度分佈、無線電波閃爍及通訊干 擾分佈圖
8. 電離層斷層攝影、電漿不規則性、太陽風及磁暴對電離層的影響研 究。
9. 衛星精確軌道定位研究。
10. 地球重力場觀測及擾動研究。
衛星上酬載的科學儀器則包括(太空計畫室,2003):
1. 全球定位系統接收儀:每顆衛星上安裝四個GPS天線,接收現有美 國24顆GPS衛星之L1及L2頻段之電波訊號,兩個天線一組分別為定 軌POD天線與掩星技術使用之天線。
2. 小型電離層光度計(Tiny Ionosphere Photometer, TIP):使用光譜頻段 為135.6 nm,推算沿衛星對著地球方向之電子密度總量。
3. 三頻段信標儀(Tri-Band Beacon, TBB):使用150、400、1067MHz 三個頻段之諧同無線電發射機(coherent radio transmitters)發射電波 信號,經由分佈各地之接收站接收後,推算在超電離層高度(90~700 公 里 ) 之 高 解 析 度 之 電 子 密 度 場 和 總 電 子 含 量 (Total Electron Content, TEC)。
ROCSAT-3/COSMIC衛星軌道設計分為兩階段,第一階段是暫駐 軌道(parking orbit),第二階段是執行任務之任務軌道(final orbit),
高度約750~800公里。衛星發射之初,燃料推進器並不會直接將衛星 打到任務軌道,而是會先送到入射軌道,再由入射軌道提到暫駐軌
道,藉由不同的暫駐軌道高度,讓衛星在太空中慢慢飄移到任務軌道 面,再提升到任務軌道,目前預定的暫駐軌道共有四種,高度分別為:
475 公里、500 公里、550 公里及750 公里。
第三章 GPS觀測資料模式與觀測資料改正模式
本章介紹實驗中求解 CHAMP 衛星軌道所使用的計算方法及改 正模式,並討論當改正量的參考坐標系與計算衛星位置之參考坐標系 不同時之轉換關係。
3.1 觀測量模式
假設在 時刻有兩顆 GPS 衛星 、 ,與地面追蹤站 和 CHAMP 衛星 ,當時間從 時刻至 時刻,兩顆 GPS 衛星與 CHAMP 衛星分 別由
i
1、 1、 的位置運行至 、 與 ,追蹤站 隨著地球自轉至 , 如圖 3-1 所示。t
1i
1j
1k
1l1 t1 t2
j l
1i
2j
2l
2k
1k
2k1
l1
l2
j2
j1
k2
i2
i1
圖 3-1 低軌衛星三次差分示意圖
假設在 時刻的 位置為已知,則雙頻載波相位三次差觀測量可 表示如下:
t
1l
1ij dt kl ij
dt trop kl ij
dt kl ij
dt kl ij
dt
kl d
f I
, 1 , ,
2 1
, ,
, 1
, = − + + Φ
Φ ρ ε
ij dt kl ij
dt trop kl ij
dt kl ij
dt kl ij
dt
kl d
f I
, 2 , ,
2 2
, ,
, 2
, = − + + Φ
Φ ρ ε (3-1)
式中,dt:t2−t1之時間段
ij dt kl ij
dt kl,1, ,Φ ,2,
Φ :L1, L2載波相位的三次差觀測量
ij dt
ρkl, :兩顆衛星與兩個測站之間三次差的真實幾何距離
ij dt
Ikl, , :分別為三次差的電離層延遲誤差及對流層延遲誤 差
ij dt tropkl
d ,
2 1, f
f :L1, L2載波的頻率
ij dt kl ij
dt kl,1, , Φ ,2,
Φ ε
ε :L1, L2載波的觀測量雜訊
將上述之雙頻載波相位三次差分觀測量加以線性組合,即可得到一無 電離層載波相位三次差觀測量:
ij dt kl ij
dt kl ij
dt tropkl ij
dt kl ij
dt kl ij
dt kl ij
dt
kl a a d a1 ,1, a2 ,2,
, , ,
2 , 2 , 1 , 1 , 3
, = Φ + Φ = + + Φ + Φ
Φ ρ ε ε (3-2)
其中 2
2 2 1
2 1
1 f f
a f
= − 、 2
2 2 1
2 2
2 f f
a f
−
= − ,經線性組合後,電離層一階影響量已 消除,若對流層延遲誤差可藉由改正模式求得,則(3-2)式中的未 知數僅為未知測站在時刻 的坐標( );觀測量表示成函數 模式 的形式為:
t2
2 2 2, l , l
l Y Z
X e
AX y= +
( )
[ ]
eZ Z Y
Y X
l l l
ij dt kl
l ij
dt kl
l ij
dt ij kl
dt kl ij
dt
kl +
⎥⎥
⎥
⎢ ⎦
⎢⎢
⎣∆
∆
⎥ ⋅
⎥⎦
⎤
⎢⎢
⎣
⎡
∂
∂
∂
∂
∂
= ∂ Φ
− Φ
2 2 2
2 2
2
, ,
, , 0
3 , ,
3 ,
ρ ρ
ρ ⎡∆X l ⎤
(3-3)
其中,( ,3, )0
ij dt
Φkl 為無電離層載波相位三次差觀測量的初始值(或計算 值), 為觀測量之雜訊,式中: e
( ) ( )
2 2
2 2
2 2
2 2
2 2 2
2 2 2
2 2 2 2
2 2 2 2
2 1
2 2
2
, , ,
j l
l j
i l
l i
l j l
l i l
l j i l
l j i k
l ij t kl
l ij t kl
l ij dt
kl X X X X
X X X
X X
X
X ρ ρ
ρ ρ ρ
ρ ρ
ρ ρ −
− −
⎟=
⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
−∂
∂
− ∂
⎟=
⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
−∂
∂
= ∂
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
−∂
∂
= ∂
∂
∂ (3-4)
同理 ( )
( )
2 2
2 2
2 2
2 2
2
,
j l
l j
i l
l i
l ij dt
kl Y Y Y Y
Y ρ ρ
ρ −
− −
∂ =
∂ (3-5)
( ) ( )
2 2
2 2
2 2
2 2
2
,
j l
l j
i l
l i
l ij dt
kl Z Z Z Z
Z ρ ρ
ρ −
− −
∂ =
∂ (3-6)
根據函數模式得知,當增加一測站或一衛星時,則函數模式中會增加 一個觀測量,但未知數並未增加,故運用無電離層載波相位三次差觀 測量可擁有多餘的觀測數以加強求解的可靠度。若沒有發生週波脫 落,觀測量經三次差分後整數週波未定值已不復存在, 在平差過程 中能夠大幅降低法方程式矩陣的階數,使得求解過程簡單快速(Goad
et al., 1996)
。3.2 對流層改正模式
對流層是指距離地表面高度為 40 公里以下的大氣層,由於距離 地表面較近,所以大氣密度遠較電離層中的密度大,且大氣狀態也將 隨著地面的氣候變化而變化,這使得對流層折射極為複雜。對流層折 射對 GPS 觀測量的影響可分為乾分量與濕分量兩部份,乾分量主要 與大氣溫度和壓力有關,而濕分量則與訊號在傳播路徑上的水氣狀況 有關。由於對流層之影響,在天頂方向的對流層延遲量約為 2.3 公尺;
而當天頂距為 80°時,對流層的延遲量增加至約為 13 公尺(劉基余 等,1995)。
本研究中採用了處理 GPS 資料常用的 Modified Hopfield 折射改 正模式改正對流層延遲量,該折射改正模式是 Goad 和 Goodman 改良 Hopfield 折射改正模式所得。模式中將對流層折射分為乾分量和濕分 量兩部份分別處理以求出對訊號折射的影響量,Modified Hopfield 折 射改正模式(Goad and Goodman, 1974)可表示如下:
⎥⎦
⎢ ⎤
⎣
⎡ +
=
∆ ∑ ∑
= =
9
1
9
1
2 2 2 1 1 1
103
j j
j
j j
j
r j
N R j N R
d α α (3-7)
式中,∆dr:距離改正量(m)
N1,
N2:分別為對流層乾分量和濕分量折射係數
2 1, R
R :傳播路徑與乾濕折射係數趨於零之邊界面交點的距離
3.3 固體潮改正
由於實際的地球並非一剛體,在日、月的引潮力(tidal force)作 用下,固體地球會產生週期性的彈性形變,這種現象稱為固體潮。引 潮力是作用於地球內單一質點上的日、月引力與地球繞地-月和地-日 之公共質心旋轉所產生的慣性離心力的合力,隨著作用點位置的不同 及日、月相對於地球位置的變化,引潮力的大小和方向也隨之改變,
在高程方向上的變化量約為 30 至 40 公分,最大位移量可達 60 公分
(胡明城和魯福,1994)。已知的地面測站坐標已將固體潮影響量修
正,故需要將此改正量加以還原以符合觀測時刻的真實幾何關係。此 位移量在進行定位時必須加以考慮,否則結果與真值之間將會有數十 公分之差距。
3.3.1 平衡潮和固體潮
1909 年英國的 Love 引進了表徵地球彈性反應的 Love 係數觀念,
這是反映地球內部構造的重要參數,奠定了現代固體潮理論的基礎。
因為日、月引潮力造成地球的彈性形變是很複雜的,為了研究固體 潮,假設地球表面全部被靜止的和不可壓縮的海水所包圍,形成一個 重力等位面,計算此等位面在日、月引潮力的作用下所產生的潮汐運 動,再與實際的地球固體潮比較,此種研究潮汐運動的理論稱為平衡 潮理論。以此理論為基礎,便可以推算日、月引潮力以及地球因此產 生的形變的數學表示式,據以計算形變的理論值(胡明城和魯福,
1994)。
圖 3-2 中
S
是實際地球表面,假設與未受擾動的重力等位面重 合,在引潮力的作用下,S
面上的 A 點實際上升到彈性地球表面S ′′
上 的A ′′
點;根據平衡潮理論, A 點應上升到地球形變後的等位面S ′
上 之A′
點。令AA′′=ζ 及AA′=ζ0分別為固體潮高和平衡潮高,兩者比值表示地表面在徑向方向的幾何變形 Love 係數,即(3-8)式所示。
h
′ A
′′
A
A
′ S
′′
S S
ζ ζo
圖 3-2 平衡潮和固體潮對地表影響之示意圖(胡明城和魯福,1994)
ζ0
= ζ
h (3-8)
實際上地球在引潮力的作用下,地球表面和內部都會發生形變,
引起地球內部密度發生變化導致重力位也發生變化,即產生位能改變 量
δ V
使重力等位面發生改變。假設日、月對於地球的總引潮位(tidalpotential)是
W
,其與位能改變量δ V
的比值為k
,其意義為地表重力 位變化的 Love 係數(胡明城和魯福,1994)。W k=δV
(3-9)
日本學者志田順則於 1912 年引用了第三個 Love 係數 ,又稱為 Shida 係數,其意義為表示實際地球表面的固體潮橫向位移與相應的 平衡潮橫向位移之比:
l
ϕ ∂ϕ
= ∂W
g
u l (3-10)
λ W
λ ϕ ∂
= ∂ g u l
cos (3-11)
式中
u
ϕ和u
λ分別為實際地球表面橫向位移的子午分量和卯酉分量,ϕ、
λ
和g
分別為地面點的緯度、經度和重力加速度。一般將 、h k
、l
統稱為 Love 係數或固體潮參數,是研究固體潮的重要參數。3.3.2 固體潮改正量的計算
由上節可知,固體潮造成的測站幾何位移是用 Love 係數 和 Shida 係數l來加以描述,Love 係數 和 Shida 係數 的值是依據測站 緯度和潮汐頻率而定的。現今預測固體潮對測站造成的位移量,最有 效率的方法是依據 Wahr 理論,採用雙步驟的處理程序(Wahr, 1981)。 第一步驟是採用與頻率無關的 Love 係數和 Shida 係數計算固體潮對 測站的影響量,在此步驟中,考慮二階及三階固體潮的影響量對於求 解結果精度已經足夠。一般對於所選用的 Love 係數和 Shida 係數的 值通常是顧及了所有測站以及所有潮波的影響而定出的,如此在第一 步驟中能改正絕大部分的位移量;而在第二步驟時,只需要作微量的 改正即可(洪志偉,1998)。在第一步驟中由二階及三階固體潮對測 站的影響量如(3-12)和(3-13)所示(McCarthy, 1992):
h
h l
( )
( ) [ ( ) ] ( )
∑= ⊕
= ⎭⎬⎫
⎩⎨
⎧ ⎥
⎦
⎢ ⎤
⎣
⎡ ⎟ ⋅ 2 −
⎠
⎜ ⎞
⎝
⎛ − +
⋅
=
∆ 3
2
2 2
2 3 2
4
2 ˆ
ˆ 2 ˆ 3 2
ˆ ˆ 3 ˆ
j
j j
j j
j
n h r
r R h l
R r R R l
GM r
rv GM (3-12)
( )
( ) ( ) ( ) ( ) [ ( ) ]
∑= ⊕
= ⎭⎬⎫
⎩⎨
⎧ − ⋅
⎥⎦⎤
⎢⎣⎡ ⋅ −
⎥⎦ +
⎢⎣ ⎤
⎡ ⋅ − ⋅
=
∆ 3
2
2 3
3 4 3
5
3 ˆ ˆ ˆ ˆ
2 ˆ 3 ˆ 2 ˆ 15 ˆ ˆ
2 ˆ 3 ˆ 2 5
j
j j j
j j
j j
n h R r R r r l R r R R rr
R GM
r rv GM
(3-13)
式中,GMj:月球(j=2)和太陽(j=3)的引力常數 GM⊕:地球的引力常數
j j R
R ,ˆ :地心至月球或太陽的向量以及向量長度 r
r,ˆ :地心至測站的向量以及向量長度
3 2,h
h :標定的二階及三階 Love 係數(在此採用
) 2920 . 0 , 6090 .
0 3
2 = h =
h
3 2,l
l :標定的二階及三階 Shida 係數(在此採用
) 0150 . 0 , 0852 .
0 3
2 = l =
l
在(3-13)式中,由於太陽(j=3)的影響量太小而忽略不計,故只 考慮月球(j=2)的影響量。經此改正,在徑向方向的位移量可達 0.17 公分,而在橫向方向的位移量不會超過 0.02 公分(McCarthy, 1996)。
經過第一步驟的改正,需再考慮與頻率相關的 Love 係數和 Shida 係數與所選用的 Love 係數和 Shida 係數之間的偏差量。由於在第一 步驟中改正了絕大部分的位移量,所以在第二步驟中殘餘的改正量相 當的微小,本研究裡只計算徑向方向上超過 0.5 公分的位移量,則在 第二步驟中,只需要估計潮汐振幅超過 0.5 公分的 周日潮波的影響 量,在 Wahr 理論中採用
k1
5203 .
1 =0
hk ,因為在(3-12)式中採用的二階 Love 係數和 Shida 係數分別為h2 =0.6090和l2 =0.0852,此時估計徑向 方向的位移量如(3-14)式所示(McCarthy,1992)。
(θ λ
φ π φ
δ
δ ⎟⎟⎠ +
⎞
⎜⎜⎝
⎛−
= 1 1 3sin cos sin 1 24
5
k k
k
sta h H
h )
)
(3-14)
為計算方便故可簡化為:
(
θ λφ φ
δhsta =−0.0253sin cos sin G + (3-15)
式中,δhk1 =hk1−h2(=−0.0887)
1
Hk :在潮汐位的諧和展開式中 項的振幅(k1 =0.36878 公尺)
φ:測站的緯度 λ:測站的經度
1
θk :周日潮波 的幅角(=k1 θG +π) θG:格林威治視恆星時(GAST)
在(3-15)式中,當測站緯度φ=45°時的影響量為最大,位移量可達 1.3 公分。
3.3.3 太陽與月球位置的計算
於固體潮對於測站所產生之位移量計算中須知太陽及月球相對 於地球的位置,在此採用簡便的太陽及月球之地心位置的計算公式
(The Astronomical Almanac, 1994),所得的太陽及月球之位置精度已 可滿足固體潮改正計算時的需求。由太陽至地心的距離 、太陽的黃 經(ecliptic longitude)
r
sλs以及黃赤交角(obliquity of ecliptic)ε ,太 陽的位置在地心直角坐標系中可表示如下:
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
=
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
s s
s s
s s
s T s
s
r r r
Z Y X
λ ε
λ ε λ
sin sin
sin cos cos
(3-16)
其中 、rs λs、ε可分別以(3-17)至(3-19)式表示:
AU l l
rs =(1.00014−0.0167cos ′−0.00014cos2 ′) (3-17)
l l
s =L+1o.915sin ′+0o.020sin2 ′
λ (3-18)
T 01461 . 0 440 .
23o − o
ε = (3-19)
式中,AU 為天文單位(1AU =0.149597870659999996×1012m), 、
、
L l′ T 分別為太陽平黃經(mean longitude)、太陽平近點角(mean anomaly)和時間參數,可分別以(3-20)至(3-22)表示:
T
L=280o.466+36000o.77129 (3-20)
T
l′=357o.528+35999o.05096 (3-21)
( )
( −2451545.0 /36525
= JD t
T ) (3-22)
式中,JD( )t 是觀測曆元的儒略日(julian day),T 是從標準曆元 西t0