1
教育部教學實踐研究計畫成果報告
Project Report for MOE Teaching Practice Research Program
計畫編號/Project Number:PEE1080064
學門專案分類/Division:工程
執行期間/Funding Period:2019-08-01-2020-07-31
建構自動駕駛模型車導入工程學院課程教材教具之研究
Research on Constructing Auto-driving Model Car Teaching Materials Importing Engineering College Course
實務專題(自動駕駛車技術及實作)
Practice Project(Autopilot Technology and Implementation)
計畫主持人(Principal Investigator):李振興 執行機構及系所(Institution/Department/Program): 崑山科技大學/電機工程系 成果報告公開日期: ■立即公開
□
延後公開(統一於 2022 年 9 月 30 日公開)2
建構自動駕駛模型車導入工程學院課程教材教具之研究
Research on Constructing Auto-driving Model Car Teaching Materials Importing Engineering College Course
一. 報告內文(Content)
1. 研究動機與目的(Research Motive and Purpose)
私立科技大學學生程度普遍不佳,學習態度又相當被動。在本人的教學經驗中,了解到 這類型學生更需從做中學習課程,教授課程的每一個步驟都要明確且按步就班。另一方面, 要嶄新有趣的教材,才能激發他們學習的興趣。因此,本計畫針對這類型學生,提出一個實 驗性質的課程設計,研究如何協助他們完成課程的學習。 審視目前科技的潮流,工程技術不斷的分工又不斷的統合成另一項新技術。因此選擇自 動駕駛車的技術課程,作為課程的設計。自動駕駛車是當前蓬勃發展的高科技技術,自動駕 駛車是一種智慧載具,具備感知、決策及控制等功能。自動駕駛車是一個綜合的技術,包括 機械、電機、資訊、通訊技術。學習課程幾乎都涵蓋在工程學院。站在教育第一線的老師也 要適時的更新教材及教學方法,才能教導這一代的青年。但是困難的部分就是沒有教材和教 學範例與方法,本計畫即是建立教材和教學範例與方法。利用與學生的互動可以微調教材和 教學範例與方法。最後可以將計畫成果提供給所有科技大學教授參考,作為教授工程學院課 程的範本。 這個實驗性質的課程設計有以下的優點: 第一是創新的技術課程,自動駕駛車技術是目 前極力發展的工程技術,可啟發學生的興趣。第二是本課程涵蓋工程學院技術,可以整合本 校工程學院學生的學習藍圖。第三是本課程強調做中學的「創客」精神,符合私立科技大學 學生的學習方式。第四是本課程引導學生問題導向學習法,不只能夠解決問題,也同時處理 問題。如同教育先進所言:教學是施教者以適當的方法,增進受教者學到有認知意義或有價 值的目的活動。教學是教學者透過教學設計,運用適當教學方法,使學習者學習到有學識認 知、道德價值和行為技能的教與學互動歷程。 本計畫研究議題相當重要並具有影響力,2018 年 12 月立法院三讀通過《無人載具科技 創新實驗條例》,明訂結合人工智慧無人駕駛的車輛、船舶、航空器的移動載具可申請實驗, 於核准範圍內可排除道路交通管理處罰條例、船舶法、民用航空法部分條文規範,鼓勵投入 無人載具實驗。像是Google 無人車、無人觀光船都可以上路測試。以無人車來說,無人車產 業包括軟體和硬體是上兆美元的產業。因此科技大學更需趕快培養相關的人才,本計畫可以 培養相關軟硬體綜合人才的前瞻計畫。另外一方面,行政院在台南高鐵站特定區新建國內首 座封閉式自駕車試驗場域。自駕車示範場域屬於前瞻基礎建設計畫,面積逾 2.2 公頃,涵蓋 了試驗場域、含整備間的行控中心,以及系統及設備工程等 3 部分,建置國內首座封閉式自 駕車測試場域,接軌下一階段開放式自駕車測試場域。場域內設計了包含 4 種市區道路、3 種郊區道路、6 種特殊路況等 13 種情境,4 橫 5 縱的棋盤式規劃,進行中型巴士以下與時速 30 公里以下的自駕車測試,還有展示之用。本計畫培育相關軟硬體人才與建置課程教材與教 具,迎接這個市場的人才需求,符合時代潮流趨勢。 創客(Maker)教育(亦稱「自造者教育」)強調讓學生「動手做」,正可以培養學生創新、批 判、解決問題、合作溝通的能力。本教學實踐研究計畫即是將創客教育融入工程學院課程的 計畫,大學的實驗室就是一個很好的創客空間。本計畫進行創新/新興課程方案建構、教材教 具研發為主要研究目的。教學方法探究則採用創客(Maker)教育的方式,強調讓學生「動手做」。 本計畫將建立該課程的學習教具,並且構建一套學習教材。所以教具與教材也是本計畫的產 出績效。本計畫的目的是提升學生學習成效和教學品質。在科技大學的課程該如何分工與統
3 整,使得新時代的大學生能夠建立完善的基礎知識與學習創新應用技術,這是科技大學教育 的嚴肅問題之一。 2. 文獻探討(Literature Review) 參考文獻[1]是一本介紹書籍,深入淺出地呈現無人駕駛這個複雜的系統。書中包含無人 駕駛定位與感知演算法、無人駕駛決策與控制演算法、深度學習在無人駕駛的應用、無人駕 駛系統、無人駕駛雲端平台、無人駕駛安全等章節,既巨觀地呈現無人駕駛技術的架構,又 極佳地深入到無人駕駛有關的每個技術點。參考文獻[2]是 IEEE Spectrum 國際雜誌有關自動 駕駛車的特別報導,很值得參考與閱讀。 國際科技教育與人工智慧產官學界紛紛投入人工智慧自動駕駛的技術研發。基於經費、 安全考量及大眾化需求,以模型車投入學習與研究自動駕駛的相關技術,如參考文獻[3-7]所 示。目前這個領域最有名的自動駕駛模型車有麻省理工學院的 Duckiebot 小鴨車[3]、Donkey Car 驢車[4]、NVIDIA 的 JetBot[5]、亞馬遜的 AWS DeepRacer[6]、Self Driving RC Car[7]等。 這些都是開放原始碼,為學生與自造者提供充滿創意、樂趣的學習自動駕駛與人工智慧。 這些知名的自動駕駛模型車各有各的優缺點,比方 Duckiebot 小鴨車[3]和 NVIDIA 的 JetBot[5]是使用雙直流馬達的兩輪行走形式,因此與目前汽車的轉向系統不同,感覺不像真 實的汽車。Donkey Car 驢車[4]使用 HSP 94186 1/16 比例四輪傳動遙控車,速度很快。遙控車 本身對於小範圍較難控制,適合較大範圍的場域。亞馬遜的AWS DeepRacer[6]也是使用 1/18 比例四輪傳動遙控車,同樣速度很快,適合作為賽車比賽。小鴨車小鴨城Duckietown[3]源自 於麻省理工學院MIT 2.166 自動駕駛車開放課程,使用樹莓派加魚眼相機加上馬達控制板建 立一個自走小車(小鴨車DuckieBot)。小鴨城Duckietown平台是大學AI/機器人課程的一部分。 已有10 個國家的 735 名學生在大學課堂上使用小鴨城 Duckietown 為 AI 和機器人技術課程, 如麻省理工學院,蘇黎世聯邦理工學院和蒙特利爾大學。驢車Donkey Car[4]是一個開源機器 學習的自走車專案,車上唯一的感測器就是相機。驢車Donkey Car 使用樹莓派和 Python, 利用 Keras 深度學習框架實現自動駕駛。機器學習流程,包括資料蒐集與處理、模型選擇與 調整、訓練、測試驗證等。可以自由修改軟硬體,包括深度學習網路模型、車體和車道,支 援多種深度學習網路模型,包括 CNN、RNN。JetBot[5]人工智慧自走車,開放原始碼為自造 者、學生提供打造充滿創意、樂趣且絕頂聰明人工智慧。採用小巧但強大的 NVIDIA Jetson Nano 人工智慧電腦,同時支援多個感應器和神經網路,以進行物件辨識、避免碰撞等。 AWS DeepRacer[6]是一款 1/18 比例的自動駕駛賽車,目的在透過實體賽道上的比賽來測試 強化學習(Reinforcement Learning)。使用攝影機查看賽道和強化模型以控制油門和轉向,這種 賽車示範如何將模擬環境中訓練的模型轉移到真實世界。Zheng Wang 的自動駕駛模型車網頁 資料[7]內容是利用 RC 模型車、樹莓派及攝影機製作自動駕駛 RC 模型車。使用的方法是人 工智慧神經網路辨別紅綠燈及行車標誌。這個網頁附有執行程式,是製作自動駕駛 RC 模型 車很有用的資料。 參考文獻[8]及[9]是本計畫成果的研討會論文,針對建構自動駕駛模型車導入工程學院課 程教具及人工智慧自動駕駛教具實踐研究這兩個論題提出研討與成果。建構自動駕駛模型車 導入工程學院課程方面,提出教學主題單元、教學目標、教學方法、成績考核方式、各週課 程進度、學習成效評量工具。人工智慧自動駕駛教具實踐研究方面,製作研究一款作為人工 智慧自動駕駛教具的模型車,克服坊間知名自動駕駛模型車的缺點,保留其優點。該論文的 創意是車體的改進,改造坊間遙控車成為自動駕駛模型車,與市面上汽車外型相近,比較有 視覺的相似性、親切感。同樣,該論文製作的車道模型也近似於一般的街道,所以也有視覺 的相似性、親切感。並可加以變化修改車道的設計,這都能讓學生學習人工智慧自動駕駛與 真實的自駕車更接近。 參考文獻[10]是陳立昂先生的碩士論文,該論文研究設計一款自動駕駛模型車。該款自
4 動駕駛模型車也是使用Donkey Car 驢車[4]為原型,可以提供給本課程的學生參考。參考文獻 [11]是 David Ungurean 的碩士論文,也是使用 Donkey Car 驢車[4]為原型,可以提供給本課程 的學生參考。參考文獻[12]是 Jason Zisheng Chang 的大學專題論文,也是使用 Donkey Car 驢 車[4]為原型,可以提供給本課程的學生參考。從參考文獻[10-12]的參考資料就可以查到更多 的相關研究報告與研究成果。 參考文獻[13]是林大貴先生的編著,由博碩出版社出版。對人工智慧深度學習初學者學 習門檻低,可以很容易地建立深度學習模型,並且進行訓練、預測。等讀者熟悉深度學習模 型概念與應用後,再來學習TensorFlow 就很輕鬆了。TensorFlow 功能強大、執行效率高、支 援各種平台,然而TensorFlow 是低階的深度學習程式庫,學習門檻高。所以該書先介紹 Keras, Keras 是高階的深度學習程式庫(以 TensorFlow 作為後端引擎)。本課程關於人工智慧深度學習 的教學也是使用該書為教科書。 3. 研究問題(Research Question) 本計畫是基於工程技術不斷創新,在科技大學的課程該如何分工與整合,使得新時代的 大學生能夠建立完善的基礎知識與學習創新應用技術。而私立科技大學學生數理程度普遍不 佳,這類型學生更需要從實作中學習知識。這類型學生更需要嶄新有趣的教材,才能激發他 們的學習興趣。本計畫針對這類型學生,提出一個實驗型的課程設計。 自動駕駛車是當前蓬勃發展的高科技技術。自動駕駛車是一個綜合的技術,包括機械、 電機、資訊、通訊技術。學習課程幾乎都涵蓋在工程學院。本計畫以創客的精神,建構自動 駕駛模型車導入工程學院課程之研究。建構自動駕駛模型車作為課程的教具,並提出相關的 創新教材。 教學實踐研究對象是大學部工學院電機系三年級學生。私立科技大學學生絕多數是高職 相關科系的畢業生,學生的特質是不喜歡數學、英文、推導公式。比較複雜的操作步驟也會 使他們降低學習意願。本計畫研究對象(學生)的學習意願比較低,以逐步引導他們學習(step by step)。他們之中也有比較快學會的,將這些學生提升為小老師,輔導其他比較不會的同學。 為提升班級小老師的意願,使用加平時分數的方法激勵他們。 本計畫完成之教學成果是出版一本教科書(自動駕駛模型車課程教材),內容就是本計畫 的內容與心得,此教科書適用於大學工程學院使用。教學計畫成果是開發創新教學方法,針 對大學部工程學院整合型課程,同時也針對科技大學。教學計畫成果是將大學部工程學院課 程融入創客工具與創客精神。輔導學生參加相關比賽得獎,為校爭光。為符合時代潮流,教 學方法與教材一定要有所適應,尤其是目前少子化的衝擊。為使學生能夠更融入日新月異的 科技進步與時代潮流,將創客工具與創客精神融入課程是一個不二的選擇。 4. 研究設計與方法(Research Methodology) 課程的第一階段是就RC 模型車加以改裝,建構自動駕駛模型車教具。如圖 1 所示,是 本計畫改裝完成的自動駕駛模型車。這些自動駕駛模型車都是學生於課堂上完成的。創客 (Maker)教育(亦稱「自造者教育」)強調讓學生「動手做」,正可以培養學生創新、批判、解決 問題、合作溝通的能力。本教學實踐研究計畫即是將創客教育融入工程學院課程的計畫。大 學的實驗室就是一個很好的創客空間,像我在崑山科技大學電機系所管理的自動控制實驗室, 裡面就有電腦、儲存式示波器、三用電表、麵包板、電烙鐵。因此將崑山科技大學電機系的 自動控制實習室作為上這個課程的教室。本計畫進行創新/新興課程方案建構、教材教具研發 為主要研究目的。所以教具與教材也是本計畫的產出績效。
5 圖1:改裝完成的自動駕駛模型車
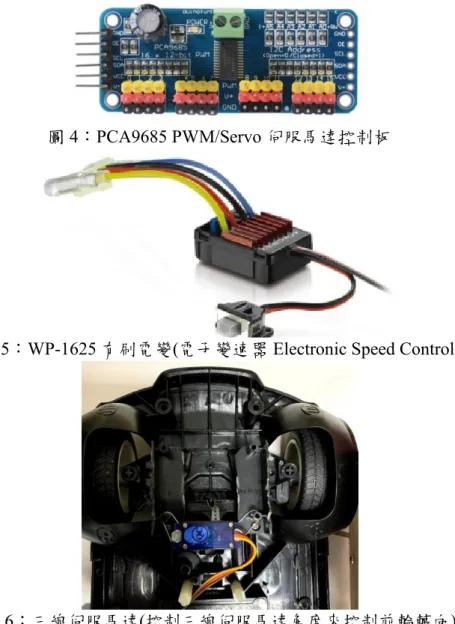
課程的第二階段是學習硬體電路,包括:樹莓派單板電腦、攝影機(魚眼相機)、三線伺 服馬達、PCA9685 PWM/Servo 伺服馬達控制板、WP-1625 有刷電變(電子變速器 Electronic Speed Control),如圖 2 到圖 6 所示。
圖2:自動駕駛模型車硬體元件
6 圖4:PCA9685 PWM/Servo 伺服馬達控制板
圖5:WP-1625 有刷電變(電子變速器 Electronic Speed Control)
圖6:三線伺服馬達(控制三線伺服馬達角度來控制前輪轉向)
課程的第三階段是學習軟體,包括:SD Card Formatter、Win32Diskimager、WinSCP、putty, Google 的 Colaboratory,github,Python(Jupyter Notebook),人工智慧深度學習。
SD Memory Card 格式化軟體能夠將 SD 記憶卡格式化相容的 SD 檔案格式。Win32 Disk Imager 是開放原始碼的卸除式磁碟映像檔製作及寫入工具,可讓使用者製作隨身碟、SD 記 憶卡等卸除式磁碟的映像檔或是將映像檔寫入卸除式磁碟,前者可將卸除式磁碟所儲存的資 料完整備份,做為日後還原之用,而後者則可寫入開機映像檔等重要檔案。WinSCP 是一個 在 Windows 中使用 SSH 的開放原始碼的圖形化 SFTP 用戶端程式,同時也支援 SCP 通訊 協定。其主要功能就是安全地在電腦間傳輸檔案。本計畫課程使用WinSCP 作為樹莓派與 PC 傳遞檔案的功能。putty 是方便的 Telnet/SSH 安全遠端連線程式,其功用是達成網路連線到 另一台電腦,許多有需要文字模式的網路連線可以考慮使用putty。putty 支援多種網路協定, 包括SCP,SSH,Telnet,rlogin 和原始的通訊端連接,也可以連接到序列埠,其軟體名字「putty」 沒有特殊含義。在沒有螢幕或鍵盤的情況下,PC 或 NB 可以使用 putty 連線到樹莓派執行遠 端操作。本計畫課程也是使用putty 作為樹莓派遠端操作,因為模型車是無線操控,所以就以 WiFi 與 putty 來執行遠端無線下指令操控自動駕駛模型車。 軟體的部分使用 Python 語言,Python 可以控制樹莓派單板電腦。本計畫課程使用的樹莓 派是Pi3B 版本,使用的樹莓派作業系統是 2019-04-08-raspbian-stretch-full (Desktop+ Software 版本)。要使用 donkey car 自駕車開源軟體必須先建立 donkeycar 專案,donkeycar 專案的指令 如下:
7 (env)$ cd ~
(env)$ donkey createcar --path ~/black
第一個指令是到根目錄,第二個指令是建立一個專案在/black 目錄。
/black 目錄包括 config.py,myconfig.py,train.py,manage.py 檔案與 logs,data,models 目錄。 /black/data/資料夾是放駕駛資料的地方,包括油門與轉向控制資料、模型車前方攝影機影像 資料。/black/models/資料夾是放深度學習檔案的地方。myconfig.py 檔案內有油門與轉向的校 正資料。train.py 是深度學習的 python 檔案,manage.py 是駕駛的 python 檔案。
使用以下指令測試相機: $ raspistill -v -o test.jpg
raspistill 是拍照指令,預設 5 秒後拍照,照片檔案名稱為 test.jpg。可以使用 WinSCP 將檔案 傳到PC 再檢查照片是否正常。raspistill 是用於使用相機模塊捕獲靜態照片的命令行工具。 轉向控制就是控制三線伺服馬達,使用 PCA9685 PWM/Servo 伺服馬達控制板控制伺服 馬達轉動角度定位,就可以轉動前輪方向機構。測試轉向的指令如下:
(env)$ donkey calibrate --channel 1 --bus=1
以此命令可以手動輸入PWM 值,試驗自駕車的輸出情形。測試得到的數據為(black) STEERING_CHANNEL = 1 STEERING_LEFT_PWM = 470 STEERING_RIGHT_PWM = 350 最左轉的PWM 值為 470,最右轉的 PWM 值為 350,置中是 410。 油門就是後輪直流馬達的電壓控制,測試油門控制的指令如下: (env)$ donkey calibrate --channel 0 --bus=1
測試得到的數據為(black) THROTTLE_CHANNEL = 0 THROTTLE_FORWARD_PWM = 500 THROTTLE_STOPPED_PWM = 400 THROTTLE_REVERSE_PWM = 250 前進最快的PWM 值為 500,停止的 PWM 值為 400,後退最快的 PWM 值為 200。 在 RC 遙控車上倒車,ESC(WP-1625 直流有刷電變)必須接收一個倒車脈衝(PWM 值), 即零脈衝(倒車脈衝)才能開始倒車。控制方式是使用 PCA9685 PWM/Servo 伺服馬達控制板, 也是使用PWM 值控制 WP-1625 有刷電變。WP-1625 有刷電變再控制直流馬達的輸入電壓及 正負電壓,達到控制動力/速度及正反轉的目的。 利用 nano 編輯軟體編輯組態檔,指令如下: (env)$ nano myconfig.py
修改成以下的數據(black)並儲存檔案。 STEERING_CHANNEL = 1 STEERING_LEFT_PWM = 470 STEERING_RIGHT_PWM = 350 THROTTLE_CHANNEL = 0 THROTTLE_FORWARD_PWM = 500 THROTTLE_STOPPED_PWM = 400 THROTTLE_REVERSE_PWM = 250 人工智慧深度學習資料包括油門與轉向控制資料、攝影機影像資料。人工智慧深度學習 結 果 包 括 即 時 的 油 門 與 轉 向 控 制 , 目 的 是 達 到 自 動 駕 駛 相 關 功 能 。 使 用 Google 的 Colab(Colaboratory 的簡稱)做深度學習的程序說明如下。共分成 4 個步驟。第 1 步是利用鍵盤 控制模型車練習自動駕駛的相關方案,收集控制資料和影像資料,影像資料是模型車攝影機 資料。控制資料和影像資料是存放在樹莓派的~/black/data/資料夾。然後將控制資料和影像資 料傳到github 作為保存資料。第 2 步是在 Colab 抓 github 保存的控制資料和影像資料。Colab 環境可以不用在一開始安裝一大堆軟體、不挑作業系統、能夠立即實驗資料科學或機器學習
8 專案、在學習時不用預花太多成本(例如雲端虛擬機器費用)、還能支援加速硬體(如:GPU) 或是自定環境。第 3 步是在 Colab 利用人工智慧訓練深度學習模型,並將訓練完成的深度學 習 模 型 傳 到 github 保存。第 4 步是在樹莓派抓取 github 保存的深度學習模型放到 ~/black/models/,並執行自動駕駛驗證與測試。使用這四個步驟循環,直到達到預期的自動駕 駛的相關方案目標。 課程的第四階段是學習各種自動駕駛的模式,包括: 車道跟隨課程 路邊停車課程 倒車入庫課程 紅綠燈判別課程 自動駕駛之切換車道課程 自動駕駛之避障課程 自動駕駛之兩車交會課程 每一個教學主題單元包括:教學目標、教學方法、成績考核方式、各週課程進度、學習成效 評量工具。成績考核方式以每種教學主題單元所得到的成果作為分數評量的標準。另外、實 作報告也列入評分。團隊合作與分工也是評分的標準。教學單元的學習成效評量工具有問卷 調查、實作評量、口試、行為觀察。教學單元結束後有設計問卷調查,詢問學生是否有學到 課程內容。簡單的口試可以了解學生的學習成效,所以本課程會用口試作為學習成效評量工 具。行為觀察是最直接了解學生學習態度的方法,學生有沒有認真學習,可以一目了然。如 果沒有認真學習,還可以當場指正學生。
5. 教學暨研究成果(Teaching and Research Outcomes) (1) 教學過程與成果
車道跟隨課程單元教學程序如下:
第一步是使用鍵盤控制模型車(瀏覽器控制模型車),使用以下指令操作: (env)$ cd ~/black
(env)$ python3 manage.py drive
執行後開啟Google 瀏覽器,輸入網址 192.168.0.13:8887
使用User(d)執行,鍵盤 i 表示前進,鍵盤 k 表示後退,鍵盤 j 表示左轉,鍵盤 l 表示右轉,空 白鍵表示停止,按 r 收錄標記資料。 如此就能利用 WiFi 與鍵盤遙控模型車並儲存影像、轉 向、油門資料,存在樹莓派的~/black/data/資料夾。
第二步是在 github 開一個新的 Repo(倉儲),名稱是 black。在樹莓派輸入以下指令: (env)$ cd ~/black
(env)$ git init (env)$ git add .
(env)$ git config --global user.email "gmail 帳號@gmail.com" (env)$ git config --global user.name "github 帳號"
(env)$ git commit -m "data1"
(env)$ git remote add origin https://github.com/github 帳號/black (env)$ git push -u origin master
git init 指令是初始化一個倉儲,git add .指令是將所有修改過或新增加的檔案一次 Add 進 stage 狀態,git commit 就是存檔,-m 參數是指快速提交,括號內文字是註記。第七行、第 八行指令是設定好遠端節點,把東西推上去遠端主機的同名目錄。就將模型傳到 github 的 /github 帳號/black 目錄。
9 第三步是在 Google Colab 下執行,開啟一個使用 GPU 的 Python3 ipynb 檔案,首先更改 tensorflow 版本設定,指令如下:
! pip uninstall -y tensorflow
! pip install tensorflow-gpu==1.13.1
安裝 donkeycar 開發套件及 PS3 指令如下:
! pip install git+https://github.com/autorope/donkeycar@ec7ea7a
! pip install git+https://github.com/raspberrypi-tw/donkeypart_ps3_controller 完整複製github 的行車資料,指令如下:
! git clone https://github.com/github 帳號/black
若要載入差異github 的行車資料,則使用指令如下: ! cd black && git pull
! ls black
第四步是載入行車資料後,接著執行深度學習訓練,指令如下: ! cd black && mkdir models
! cd black && python3 manage.py train --type rnn --model models/RNN_1.h5
第一行指令是進入black 主目錄資料夾,並且建立子目錄 models。第二行指令是進入 black 主 目錄資料夾執行 Python3 程式 manage.py 訓練資料。使用 RNN 模型,訓練完後模型存到 models/RNN_1.h5 檔案。
第五步是訓練完成後就將模型傳到 github 供樹莓派下載使用。上傳 github 的指令如下: ! git config --global user.email "[email protected]"
! git config --global user.name "Your Name" ! cd black && git add .
! cd black && git commit -m 'RNN_1'
! cd black && git push https://帳號:密碼@github.com/github 帳號/black ! cd black && cd models && ls
第一行、第二行指令是輸入 github 電子郵件帳號及名稱。第三行指令是進入 black 目錄並且 新增加檔案。第四行指令是進入 black 目錄並且快速提交存檔,括號內文字是註記。第五行 指令是進入 black 目錄,設定好遠端節點,把東西推上去遠端主機的同名目錄。就將模型傳 到github 的/帳號/ black/models/RNN_1.h5 檔案。 第六步如下:回到樹莓派上執行命令,將學習結果 RNN_1.h5 檔案下載到樹莓派 /black/models/RNN_1.h5,指令如下:
(env)$ git pull
或 是 用 WinSCP 把 github/ 帳 號 /black/models/RNN_1.h5 檔 案 傳 到 樹 莓 派 的 /black/ models/RNN_1.h5
接著,執行自動駕駛,指令如下: (env)$ cd ~/black
(env)$ python3 manage.py drive --type rnn --model models/RNN_1.h5 打開Google 瀏覽器,網址如下
http://192.168.0.19:8887/drive 使用Local Pilot(d)執行。
10 圖8:比賽成果照片 圖7 是本計畫課程的教學與觀摩照片,圖 8 為本計畫課程學生參加相關比賽獲得的榮譽獎狀。 (2) 教師教學反思 本計畫提出了一個創新實用的自動駕駛模型車與人工智慧技術的實作課程。教學共有四 個階段,分別是改裝RC 模型車,建構自動駕駛模型車教具、學習硬體電路、學習軟體、學 習各種自動駕駛的模式。有些階段比較複雜需要用到數週的課堂時間。這門創新創意的整合 型課程很適合一個學期的課程,對於大三學生算是一門創客型的課程。 整理教學過程的資料,將完成出版一本教科書,書名暫定是"自動駕駛模型車與人工智慧 技術",適用於大學部工程學院使用。此教科書著重自主學習,融入創客工具與創客精神。 針對私立科技大學學生程度普遍不佳,學習態度又相當被動。本課程著重操作部分,因 此學生都學得相當開心。從這一個計畫所得到的經驗,印證了私立科技大學學生需從做中學 習課程,教授課程的每一個步驟都要明確且按步就班,要嶄新有趣的教材,才能激發他們學 習的興趣與成就感。另一方面,我鼓勵學習比較積極的學生組隊參加相關比賽,也有獲得佳 作的成績,也算是因才施教的成果。 (3) 學生學習回饋 在這個計畫這門課的學期末,我使用紙本問卷調查,共 11 題。詢問修課學生,關於選修 這門課程的結果。主要目標是提高學生對自動駕駛車與人工智慧的理解,並培養學生對此學 問的興趣。以下是期末問卷調查的題目與評分,最低分是零分,最高分是五分,括號內是平 均分數。學生問卷調查表明學生在自動駕駛與人工智慧方面有很大理解。學生們明確接受了 本課程的內容。 1. 這些課程單元使你更好理解自動駕駛車與人工智慧。(評分得 4.0 分) 2. 你對這些課程單元非常感興趣,並激勵你學習自動駕駛車與人工智慧。(評分得 4.1 分) 3. 這些課程單元適用於自動駕駛車與人工智慧課程。(評分得 4.3 分) 4. 這些課程單元內容詳細,並清楚地解釋課程的目的。 (評分得 4.5 分) 5. 這些課程單元是否符合你對自動駕駛車課程的期望?(評分得 4.0 分) 6. 這些課程單元為你提供了多少實用知識與技術?(評分得 4.0 分) 7. 這些課程單元創新程度如何?(評分得 4.3 分) 8. 你對此自動駕駛車與人工智慧評價如何?(評分得 4.5 分) 9. 你覺得那一單元是最符合創客精神?為什麼?(路邊停車課程是最符合創客精神的實驗;5 名學生選擇了這個單元。理由是這個單元引導他們從無到有去設計一個簡單的自動駕駛車,
11 而這個單元有確定的功能,有很大的成就感。) 10. 你最喜歡那一單元?為什麼?(紅綠燈判別課程是最喜歡的單元;5 名學生選擇了這個單 元。理由是從頭開始學習人工智慧影像辨識。) 11. 你覺得那一單元最不適合自動駕駛車課程?為什麼?(不推薦自動駕駛之切換車道課程;4 名學生選擇了這個單元。理由是數學計算太多了。)
6. 建議與省思(Recommendations and Reflections)
由於時代的變遷,學生的學習意願與學習能力也有所不同,近年來學校更為少子化所演 生的生源問題所苦。本校因為學生學習程度下降,多次要求授課老師必需因才施教,並要求 盡力輔導學習困難的學生。如同教育先進所言:教學是施教者以適當的方法,增進受教者學 到有認知意義或有價值的目的活動。教學是教學者透過教學設計,運用適當教學方法,使學 習者學習到有學識認知、道德價值和行為技能的教與學互動歷程。 基於整體環境的關係,必須教導學生實作的課程與議題,提升學生軟硬體的技術實力是 目前技職教育的重要目的,本計畫可以達到此一目的。 二. 參考文獻(References) [1]劉少山, 唐潔, 吳雙, 李力耘,無人駕駛真的來了:第一本從技術面深入的實作書,佳 魁資訊,出版日期:2018/07/05。
[2]Special Report: The Self-Driving Car,All the tech tricks and politics that will make driverless cars common place,https://spectrum.ieee.org/static/the-self-driving-car [3] Duckietown 小鴨車/小鴨城資料(開源資料網頁):https://www.duckietown.org [4] Donkey Car 驢車資料(開源資料網頁):https://www.donkeycar.com
[5] JetBot 資料(開源資料網頁):https://www.nvidia.com/zh-tw/autonomous- machines/embedded-systems/jetbot-ai-robot-kit
[6] AWS DeepRacer 資料(開源資料網頁):https://aws.amazon.com/tw/deepracer/ [7] Self Driving RC Car 資料(開源資料網頁):
https://zhengludwig.wordpress.com/projects/self-driving-rc-car/ [8] 李振興,2019 年 6 月 14 日,"建構自動駕駛模型車導入工程學院課程教具",2019 教 學實踐暨跨域研究學術研討會論文集,崑山科技大學,台灣台南,pp.1-17. [9] 李振興,2020 年 5 月 30 日,"人工智慧自動駕駛教具實踐研究", 2020 教學創新示 範學校國際研討會論文集,雲林科技大學,台灣雲林,pp.63-84. ISBN 978-986-99026-1-8 [10] 陳立昂,以樹莓派嵌入式系統搭配攝像頭及陀螺儀進行深度學習之模型自駕車,國 立台北科技大學能源與冷凍空調工程系碩士班碩士論文,台灣台北,2019 年 9 月。 [11] David Ungurean, “DeepRCar: An Autonomous Car Model”, Master's thesis. Czech Technical University in Prague, Faculty of Information Technology, May 9, 2018.
[12] Jason Zisheng Chang, “Training Neural Networks to Pilot Autonomous Vehicles: Scaled Self-Driving Car”. Senior Projects, Spring 2018.
https://digitalcommons.bard.edu/senproj_s2018/402