以影像處理估測交通流量及其應用於獨立路口的模糊適應性交通號誌管理之研究
117
0
0
全文
(2) 以影像處理估測交通流量及其應用在獨立路口的模糊適應性 交通號誌管理之研究 Estimating Traffic flow by Image Processing and its Application to Fuzzy Adaptive Traffic Signal Control at an Isolated Intersection. 研 究 生:林其德. Student: Chi-De Lin. 指導教授:林 昇 甫 博士. Advisor: Dr. Sheng-Fuu Lin. 國立交通大學 電機與控制工程學系 碩士論文. A Thesis Submitted to Department of Electrical and Control Engineering College of Electrical Engineering and Computer Engineering National Chiao-Tung University in Partial Fulfillment of the Requirements for the Degree of Master in Electrical and Control Engineering August 2006 Hsinchu, Taiwan, Republic of China. 中華民國九十五年八月.
(3) 以影像處理估測交通流量及其應用在獨立路口的模糊適應 性交通號誌管理之研究 研究生:林其德. 指導教授:林 昇 甫 博士. 國立交通大學電機與控制工程學系. 摘. 要. 交 通 資 訊 偵 測 以 及 適 應 性 交 通 號 誌 管 理 , 是 現 今 智 慧 型 交 通 系 統 (intelligent transportation system, ITS)的發展重心。將偵測到的交通資訊應用在獨立路口的適應性交 通號誌管理上,可以動態地依照當時的交通狀況調整時相長度,減少該路口擁塞的情況 發生。目前使用影像處理技術來偵測交通流量的研究相當受歡迎,但它們對交通資訊的 偵測大都使用微觀尺度的量測,這對交通號誌管理的應用其實是不必要的;另外在適應 性交通號誌管理的方面,由於具有動態變動的週期長度,所以在設計時常常不會考慮到 最佳週期而使得週期過長。有鑑於此,本論文的主要目的是發展一套有效率的交通流量 估測系統與具有適當週期長度的適應性號誌系統。 本論文的主要貢獻有三,第一,利用透視轉換(perspective transformation)得到前景 像素總數與前景物件數目之間的關係,搭配預先建立好的橢圓行人樣版,可以大約地估 測 出 行 人 穿 越 道 上 的 人 數 。 第 二 , 利 用 前 述 的 方 法 並 配 合 影 像 紋 理 分 析 (texture analysis),可以將道路或是特定車道上的車流程度以[0, 1]之間的數表示。第三,提出一 個以模糊推論系統(fuzzy inference system, FIS)為核心的模糊適應性交通號誌管理系統, 並將最佳週期以及相對路口飽和度考慮於系統的設計當中。實驗顯示本論文所提出的影 像處理演算法及模糊適應性號誌管理系統在不同的實驗場景之下皆有不錯的效果。. i.
(4) Estimating Traffic flow by Image Processing and its Application to Fuzzy Adaptive Traffic Signal Control at an Isolated Intersection. Student: Chi-De Lin. Advisor: Dr. Sheng-Fuu Lin. Department of Electrical and Control Engineering National Chiao-Tung University. Abstract. Traffic information detection and adaptive traffic signal control are vital to the development of intelligent transportation system. The cycle length of a traffic signal controller can be adjusted dynamically by applying gathered traffic information to adaptive traffic signal control at the isolated intersection, thus the traffic jams can be reduced. Detecting traffic information by use of image processing has become a trend, however, most of the previous research use microscopic measurement, which is unnecessary in application to adaptive traffic signal control. For adaptive traffic signal control system, the topic of optimal cycle is rarely considered since it has various lengths in each cycle; therefore, a very phase could have an overlong phase time. In view of this, an efficient image processing algorithm is proposed to estimate traffic flow in this thesis. In addition, an adaptive traffic signal control system that takes optimal cycle into account is presented. The contributions of this thesis may be summarized as follows. First, the relation of the number of foreground pixels and the number of foreground objects can be obtained by using perspective transformation. With the pre-constructed ellipse human template, the number of pedestrian on a crosswalk can be estimated approximately. Second, use the method mention above together with texture analysis of an image, the traffic flow can be normalized and represented by a number between 0 and 1. Third, a fuzzy adaptive traffic controller based on fuzzy inference system is proposed. The design of the system also takes optimal cycle and ii.
(5) relative saturation degree of different roads into consideration. The image processing algorithm and fuzzy traffic signal controller have been tested in various situations; the system shows promise and the experiment results are satisfactory.. iii.
(6) 誌 謝. 首先要以最誠摯的謝意,感謝我的指導教授林昇甫博士,感謝他在研究上的啟迪與 指導,以及細心校閱本論文的謬誤之處。同時也要感謝本實驗室的學長建焜、皇村、士 哲、晉嘉、國育、弦澤、松傑;一起同甘共苦的同學俊佑、哲綸、永耀、培家、威凱以 及學弟們,由於他們熱心的協助與討論,使得研究過程中的困境能夠迎刃而解。還要感 謝我的女友仲雯,與我從大學開始一路互相扶持、共同追求進步、一起成長。 最後要感謝我親愛的父母,感謝他們的養育之恩以及在我求學生涯中給我最大的鼓 勵與支持,使我得以在精神與生活上無後顧之憂,順利完成學業。. iv.
(7) 目錄 中文摘要. i. Abstract. ii. 誌謝. iv. 目錄. v. 圖目錄. viii. 表目錄. xiii. 第一章 緒論. 1-1. 1.1 相關研究 ....................................................................................................................... 1-1 1.1.1 交通資訊偵測 ...................................................................................................... 1-2 1.1.2 交通動線效率化 .................................................................................................. 1-5 1.2 研究動機 ....................................................................................................................... 1-6 1.3 論文架構 ....................................................................................................................... 1-8. 第二章. 相關知識及理論. 2-1. 2.1 影像處理技術 ............................................................................................................... 2-1 2.1.1 成像幾何學 .......................................................................................................... 2-2. v.
(8) 2.1.2 紋理分析 .............................................................................................................. 2-6 2.1.3 特徵選擇 .............................................................................................................. 2-9 2.1.4 形態學 .................................................................................................................2-11 2.2 模糊推論系統 ............................................................................................................. 2-13 2.2.1 模糊化機構 ........................................................................................................ 2-14 2.2.2 模糊規則庫 ........................................................................................................ 2-15 2.2.3 模糊推論引擎 .................................................................................................... 2-16 2.2.4 去模糊化機構 .................................................................................................... 2-16 2.3 交通系統概論 ............................................................................................................. 2-18 2.3.1 交通名詞與知識 ................................................................................................ 2-18 2.3.2 韋伯斯特最佳週期定時號誌控制 .................................................................... 2-22. 第三章 交通資訊估測系統與模糊適應性交通號誌管理系統. 3-1. 3.1 系統概述 ....................................................................................................................... 3-1 3.2 相機校正 ....................................................................................................................... 3-3 3.3 行人估測系統 ............................................................................................................... 3-6 3.3.1 前景抽取 .............................................................................................................. 3-6 3.3.2 移除非人物件 ...................................................................................................... 3-6 3.3.3 估測行人數目 ...................................................................................................... 3-9 3.4 車流估測系統 ............................................................................................................. 3-12 3.4.1 影像前處理 ........................................................................................................ 3-12 3.4.2 特徵抽取 ............................................................................................................ 3-13 3.4.3 場景校正與模糊車流估測系統 ........................................................................ 3-17 3.5 模糊適應性交通號誌管理系統 ................................................................................. 3-19 3.5.1 適應性號誌管理策略 ........................................................................................ 3-20 3.5.2 適應性號誌管理的模糊推論系統 .................................................................... 3-22. vi.
(9) 第四章 實驗結果與分析. 4-1. 4.1 實驗機制 ....................................................................................................................... 4-1 4.1.1 行人估測系統實驗機制 ...................................................................................... 4-1 4.1.2 車流估測系統實驗機制 ...................................................................................... 4-2 4.1.3 模糊適應性交通號誌管理系統實驗機制 .......................................................... 4-2 4.2 實驗結果 ....................................................................................................................... 4-9 4.3 實驗分析 ..................................................................................................................... 4-35 4.3.1 以影像估測交通流量的實驗分析 ..................................................................... 4-36 4.3.2 模糊適應性交通號誌管理系統的實驗分析 ..................................................... 4-37 第五章 結論. 5-1. 參考文獻. I. vii.
(10) 圖目錄 1.1. 利用前景邊界配合透視轉換偵測行人的例子。 (a) 輸入影像;(b) 背 景;(c) 前景邊界;(d) 偵測出的行人。 ................................................................ 1-2 1.2. 利用前景像素的垂直投影偵測行人的例子。 (a) 輸入影像;(b) 背景影 像;(c) 前景影像;(d) 前景像素垂直投影的直方圖;(e) 偵測出的行人。 ..................................................................................................................................... 1-3 1.3. 使用車道灰階直方圖判斷車道上是否有車輛的例子。(a) 車道上沒有車 輛的輸入影像;(b) 目標車道區的灰階圖;(c) 目標車道區的灰階圖分 佈;(d) 車道上有車輛的輸入影像;(e) 目標車道區的灰階圖;(f) 目標 車道區的灰階圖分佈。 ............................................................................................. 1-3 2.1. 針孔相機模型。 ......................................................................................................... 2-2 2.2. 相似三角形模型。 ..................................................................................................... 2-2. 2.3. WCS 以及 CCS 的相對位置。 .................................................................................. 2-4. 2.4. 利用方塊物件求取相機參數的圖例。 (a) 原始影像;(b) 影像的消失 點、主要點、以及地平線。 ..................................................................................... 2-5. 2.5. 計算相機位置高度的示意圖。 ................................................................................. 2-6. 2.6. 具有三個灰階的影像。 ............................................................................................. 2-7. 2.7. 位置運算子 R 的選擇方式。..................................................................................... 2-8. 2.8. 侵蝕運算。 (a) 侵蝕前影像;(b) 結構元素;(c) 侵蝕後影像。...................... 2-12. 2.9. 膨脹運算。 (a) 膨脹前影像;(b) 結構元素;(c) 膨脹後影像。...................... 2-12. 2.10 模糊系統的基本架構。 ........................................................................................... 2-14 2.11 歸屬函數。 (a) Z 型;(b) 三角形;(c) S 型。 ..................................................... 2-15 2.12 一個模糊推論過程的例子。 ................................................................................... 2-17 2.13 平均到達率 q、平均紓解率μ與飽和流率 s 的關係。......................................... 2-19 viii.
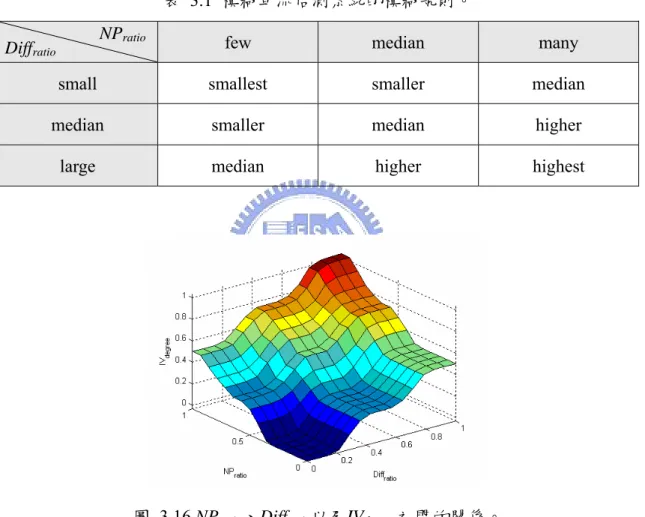
(11) 2.14 損失時間l (ls + le)、有效綠燈時間g以及實際綠燈時間G之關係。..................... 2-20 2.15 號誌化交通路口的車輛排隊模式示意圖。 ........................................................... 2-21 2.16 考慮車輛隨機到達及損失時間的車輛排隊示意圖。 ........................................... 2-22 3.1. 系統架構圖。 ............................................................................................................. 3-3. 3.2. 攝影機的架設方式。(a) 行人穿越道場景之架設;(b) 車道場景之架設; (c) 側視圖。............................................................................................................... 3-3. 3.3. 場景中消失點Vy與Vz的位置。 (a) 行人穿越道場景; (b) 車道場景。 ............. 3-5. 3.4. 行人偵測系統的流程圖。 ......................................................................................... 3-6. 3.5. 建立背景影像的圖例。 (a)至(c) 用來建立背景影像的部份影像序列; (d) 建立的背景影像。 .............................................................................................. 3-7. 3.6. 建立前景遮罩影像的圖例。 (a) 輸入影像;(b) 背景影像;(c) 前景遮 罩。 ............................................................................................................................. 3-8. 3.7. 將前景遮罩進ㄧ步處理的例子。 (a) 原來的前景;(b) 將(a)中值濾波後 的影像;(c) 將(b)閉合後的影像。 .......................................................................... 3-8. 3.8. 移除影像中非人物件的例子。 (a)-(b) 兩張連續輸入影像;(c) 移動邊 緣;(d) 處理過後的移動邊緣;(e) 除去行人穿越道上的非人物件的前 景影像。 ................................................................................................................... 3-10. 3.9. 相同物體從不同的位置投影在影像上具有不同面積的示意圖。 ....................... 3-10. 3.10 橢圓形行人樣版的示意圖。. .................................................................................. 3-11 3.11 車流估測系統的流程圖。. ...................................................................................... 3-12 3.12 圖 3.12 彩色影像轉成灰階影像的例子。 (a) 彩色影像;(b) 轉換後的 灰階影像。 ............................................................................................................... 3-13 3.13 規劃目標區域與嵌入目標區域的例子。 (a) 在影像中規劃出的目標區 域;(b) 將輸入灰階影像目標的區域嵌入灰階背景影像。 ................................ 3-14 3.14 計算特徵權重係數所用到的十張連續影像。 ....................................................... 3-16 3.15 模糊車流估測系統的歸屬函數。 (a) NPratio的歸屬函數;(b) Diffratio的歸 屬函數;(c) IVdegree的歸屬函數。........................................................................... 3-18 3.16. NPratio、Diffratio以及IVdegree之間的關係。............................................................. 3-19. 3.17 本論文提出的模糊適應性號誌控制系統的流程圖。 ........................................... 3-20 3.18 交流電流與變動車流的類比圖。 (a) 交流電流;(b) 變動車流。 .................... 3-21 ix.
(12) 3.19 模糊適應性號誌管理系統的歸屬函數。 (a) IV 的歸屬函數;(b) QL 的 歸屬函數;(c) PL 的歸屬函數;(d) EXT 的歸屬函數。 ...................................... 3-23 3.20 給定 PL 為 0.1 時,IV、QL 以及 EXT 之間的關係。 .......................................... 3-25 3.21 給定 PL 為 0.5 時,IV、QL 以及 EXT 之間的關係。 .......................................... 3-25 3.22 給定 PL 為 0.9 時,IV、QL 以及 EXT 之間的關係。 .......................................... 3-25 4.1. 模擬系統所執行的兩個時相。 ................................................................................. 4-3. 4.2. 十字形獨立號誌化路口的示意圖。 ......................................................................... 4-5. 4.3. 式子(4.2)所表示的啟動損失時間ls對車道紓解率μ之影響。 ............................... 4-5. 4.4. 第一種實驗情境。 ..................................................................................................... 4-7. 4.5. 第二種實驗情境。 ..................................................................................................... 4-7. 4.6. 第三種實驗情境。 ..................................................................................................... 4-7. 4.7. 第四種實驗情境。 ..................................................................................................... 4-8. 4.8. 第五種實驗情境。 ..................................................................................................... 4-8. 4.9. 第六種實驗情境。 ..................................................................................................... 4-8. 4.10 行人估測系統在第一個場景的部份結果。 ........................................................... 4-10 4.11 行人估測系統在第二個場景的部份結果。 ........................................................... 4-11 4.12 行人估測系統在第三個場景的部份結果。 ........................................................... 4-12 4.13 車流估測系統對第一個場景計算的前景比例NPratio、紋理差異Diffratio以 及估測出的車流程度IVdegree。 ................................................................................ 4-14 4.14 對應圖 4.13 的影像序列。(a) 幀 1;(b) 幀 200;(c) 幀 400;(d) 幀 600; (e) 幀 800;(f) 幀 1000;(g) 幀 1200;(h) 幀 1400;(i) 幀 1600;(j) 幀 1800;(k) 幀 2000;(l) 幀 2200。......................................................................... 4-14 4.15 車流估測系統對第二個場景的左轉車道計算的前景比例NPratio、紋理差 異Diffratio以及估測出的車流程度IVdegree。............................................................. 4-15 4.16 對應圖 4.15 的影像序列。(a) 幀 1;(b) 幀 183;(c) 幀 365;(d) 幀 547; (e) 幀 729;(f) 幀 911;(g) 幀 1093;(h) 幀 1275;(i) 幀 1457;(j) 幀 1639;(k) 幀 1821;(l) 幀 2000。......................................................................... 4-15 4.17 第一種模擬情境的南北向幹道之車輛到達及疏解曲線。(a) 模擬時間 (兩小時)內的車輛到達及疏解曲線;(b) (a)圖之其中五分鐘的細部放大 圖。 ........................................................................................................................... 4-16 x.
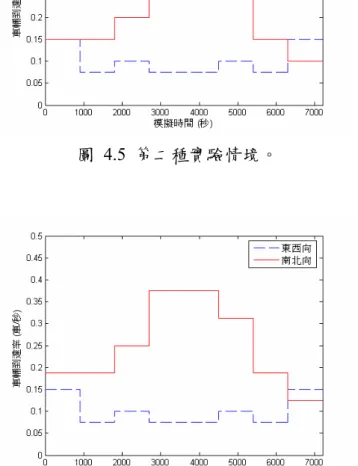
(13) 4.18 第一種模擬情境的東西向支道之車輛到達及疏解曲線。(a) 模擬時間 (兩小時)內的車輛到達及疏解曲線;(b) (a)圖之其中五分鐘的細部放大 圖。 ........................................................................................................................... 4-17 4.19 第一種模擬情境的行人到達及疏解曲線。(a) 南北向行人穿越道;(b) 東 西向行人穿越道。 ................................................................................................... 4-18 4.20 第二種模擬情境的南北向幹道之車輛到達及疏解曲線。(a) 模擬時間 (兩小時)內的車輛到達及疏解曲線;(b) (a)圖之其中五分鐘的細部放大 圖。 ........................................................................................................................... 4-19 4.21 第二種模擬情境的東西向支道之車輛到達及疏解曲線。(a) 模擬時間 (兩小時)內的車輛到達及疏解曲線;(b) (a)圖之其中五分鐘的細部放大 圖。 ........................................................................................................................... 4-20 4.22 第二種模擬情境的行人到達及疏解曲線。(a) 南北向行人穿越道;(b) 東 西向行人穿越道。 ................................................................................................... 4-21 4.23 第三種模擬情境的南北向幹道之車輛到達及疏解曲線。(a) 模擬時間 (兩小時)內的車輛到達及疏解曲線;(b) (a)圖之其中五分鐘的細部放大 圖。 ........................................................................................................................... 4-22 4.24 第三種模擬情境的東西向支道之車輛到達及疏解曲線。(a) 模擬時間 (兩小時)內的車輛到達及疏解曲線;(b) (a)圖之其中五分鐘的細部放大 圖。 ........................................................................................................................... 4-23 4.25 第三種模擬情境的行人到達及疏解曲線。(a) 南北向行人穿越道;(b) 東 西向行人穿越道。 ................................................................................................... 4-24 4.26 第四種模擬情境的南北向幹道之車輛到達及疏解曲線。(a) 模擬時間 (兩小時)內的車輛到達及疏解曲線;(b) (a)圖之其中五分鐘的細部放大 圖。 ........................................................................................................................... 4-25 4.27 第四種模擬情境的東西向幹道之車輛到達及疏解曲線。(a) 模擬時間 (兩小時)內的車輛到達及疏解曲線;(b) (a)圖之其中五分鐘的細部放大 圖。 ........................................................................................................................... 4-26 4.28 第四種模擬情境的行人到達及疏解曲線。(a) 南北向行人穿越道;(b) 東 西向行人穿越道。 ................................................................................................... 4-27 4.29 第五種模擬情境的南北向幹道之車輛到達及疏解曲線。(a) 模擬時間 xi.
(14) (兩小時)內的車輛到達及疏解曲線;(b) (a)圖之其中五分鐘的細部放大 圖。 ........................................................................................................................... 4-28 4.30 第五種模擬情境的東西向幹道之車輛到達及疏解曲線。(a) 模擬時間 (兩小時)內的車輛到達及疏解曲線;(b) (a)圖之其中五分鐘的細部放大 圖。 ........................................................................................................................... 4-29 4.31 第五種模擬情境的行人到達及疏解曲線。(a) 南北向行人穿越道;(b) 東 西向行人穿越道。 ................................................................................................... 4-30 4.32 第六種模擬情境的南北向幹道之車輛到達及疏解曲線。(a) 模擬時間 (兩小時)內的車輛到達及疏解曲線;(b) (a)圖之其中五分鐘的細部放大 圖。 ........................................................................................................................... 4-31 4.33 第六種模擬情境的東西向幹道之車輛到達及疏解曲線。(a) 模擬時間 (兩小時)內的車輛到達及疏解曲線;(b) (a)圖之其中五分鐘的細部放大 圖。 ........................................................................................................................... 4-32 4.34 第六種模擬情境的行人到達及疏解曲線。(a) 南北向行人穿越道;(b) 東 西向行人穿越道。 ................................................................................................... 4-33. xii.
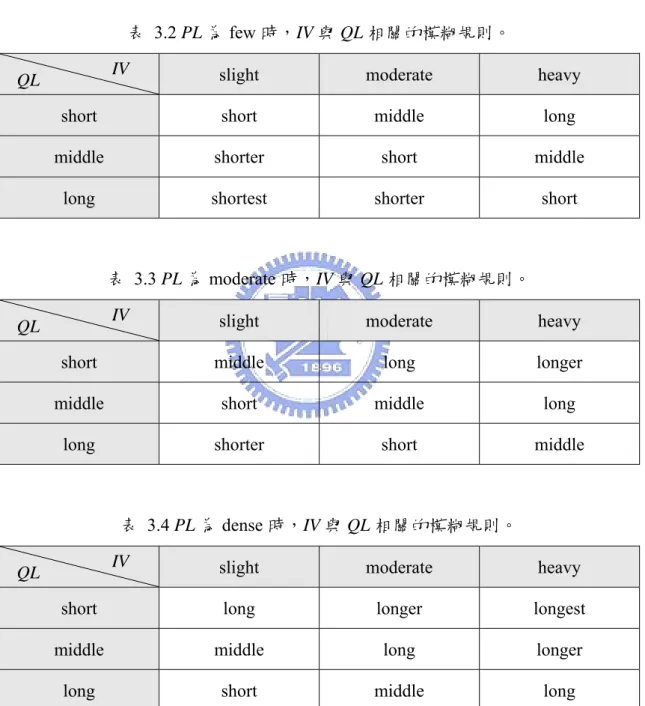
(15) 表目錄 3.1. 模糊車流估測系統的模糊規則。 .......................................................................... .3-19. 3.2. PL 為 few 時,IV 與 QL 相關的模糊規則。......................................................... .3-24. 3.3. PL 為 moderate 時,IV 與 QL 相關的模糊規則。................................................. 3-24. 3.4. PL 為 dense 時,IV 與 QL 相關的模糊規則。 ...................................................... 3-24. 4.1. 部分受測影像的前景像素、正規化前景像素以及估測人數。 ........................... 4-13. 4.2. 模擬實驗的車輛路口總延滯(車-小時)。 ............................................................... 4-34. 4.3. 模擬實驗的行人路口總延滯(人-小時)。 ............................................................... 4-35. 4.4. 模擬實驗的車輛路口總延滯加上行人路口總延滯。 ........................................... 4-40. xiii.
(16) 第一章 緒論 在現今的都會地區內,隨著工商業活動的頻繁、國民所得的提高促使了駕駛 人汽機車持有率的不斷提升,然而隨著都市人口以及車輛數目的急遽增加,目前 的交通系統遭遇了許多嚴重的問題,例如過多的車輛造成了交通阻塞,或是不恰 當的駕駛造成了交通意外。智慧型交通系統(intelligent transportation system, ITS)就 是為了因應上述的問題而提出的構想。根據參考文獻[1]的論述,ITS 的幾個主要目 標包括:1) 交通流量監控及交通動線效率化[2],[3];2) 自動駕駛車輛或輔助駕駛 系統[4], [5];以及 3)其他應用等等。 由於影像具有高搜尋範圍、高修改彈性以及價格低廉等優點,因此影像處理 技術在交通資訊偵測上相當受到歡迎。在交通流量監控及交通動線效率化的應用 上,主要的目的就是利用偵測得到的交通資訊,調整或是控制交叉路口號誌燈號 的運作,使得各車道之路權得以適當地被分配,用路人可以安全、順暢地使用道 路,並避免路口容量資源的浪費。過去的文獻主要是監控每條道路上車輛的流量, 然而,除了車輛在使用道路外,行人也是使用道路的重要角色,故要達成交通動 線的最佳化,實際上還必須要考慮行人穿越道上的行人流動。. 1.1 相關研究 與交通流量監控或交通動線效率化的相關研究大致可分為兩大部分,一部分 是偵測交通資訊,這類的研究又可再細分為對行人以及對交通載具的偵測,相關. 1-1.
(17) 文獻會在 1.1.1 節探討。另一部分則是以適應性交通號誌控制來達成交通動線效率 化的目的,這將會在 1.1.2 節討論。. 1.1.1 交通資訊偵測 在用影像來偵測行人的方面,近年來有相當多的研究。Zhao 等人[6]是利用背 景相減法(background subtraction)得到前景,藉由形態學(morphology)提取前景的邊 界(boundary),接著配合透視轉換(perspective transformation)判斷邊界的形狀是否類 似於人體的形狀以偵測行人,如圖 1.1 所示。Haritaolu 等人[7]也是利用背景相減 法,將前景與背景分離,再將前景像素作垂直投影得到直方圖,若是直方圖的峰 值在可能的影像人高範圍內,則代表在該位置有行人,如圖 1.2 所示,但是當輸入 影像中某一個行人的下半身與另ㄧ名行人的上半身交疊在一起時,這樣的方法將 會失敗。Pai 等人[8]利用前景的輪廓(contour)以及步行韻律(walking rhythm)對前景 做辨識,以辨別偵測到的前景是否為行人。Jean 以及 Wu [9]使用時間差異法 (temporal differencing)找出移動的像素,將移動像素和輸入影像的邊緣做交集運算 (AND operation)可以得到移動的邊緣,對移動邊緣作橢圓偵測即可找出行人的人 頭。Lin 等人[10]使用小波轉換(wavelet transform)提取人臉特徵,並使用支援向量 機(support vector machine, SVM)作為分類器,這個方法可以較精確地偵測出大量的 人頭數目,並且不需建立背景,只需要單一的輸入影像即可辦到;配合透視轉換 則可以估測數百甚至數千人的行人數目。. (a). (b). (c). (d). 圖 1.1 利用前景邊界配合透視轉換偵測行人的例子。 (a) 輸入影像;(b) 背景; (c) 前景邊界;(d) 偵測出的行人。. 1-2.
(18) (b). 像素個數. (a). 輸入影像的行. (c). (d). (e). 圖 1.2 利用前景像素的垂直投影偵測行人的例子。 (a) 輸入影像;(b) 背景影 像;(c) 前景影像;(d) 前景像素垂直投影的直方圖;(e) 偵測出的行人。. 除了上述偵測各別行人的方法之外,有些文獻則是對影像中特定目標區域 (region of interest, ROI)的行人數目或是密度做分類。Coianiz 等人[11]利用影像中移 動的邊緣像素以及前景的像素作為輸入的特徵向量(feature vector),加以訓練後送 入 預 先 設 定 好 的 決 策 規 則 (decision rules) 進 行 模 糊 圖 形 識 別 (fuzzy pattern recognition, FPR)而將人群數目分為無、少、一些、多以及非常多等五類。Marana 等人[12]利用灰階相依矩陣(gray-level dependence matrix)分析影像特定目標區域的 紋理(texture),將抽取出的特徵向量利用神經網路(neural network)訓練後,將人群 密度分為五類。Cho 等人[13]結合神經網路以及混合的全域學習(hybrid global learning)演算法對行人數目做分類。參考文獻[14]將影像分為數個區塊,利用前景 在這些區塊中的分布情形計算熵(entropy),若所算出的熵大於某個臨界值,則稱場 景中有許多行人。 在用影像方法來偵測交通載具的方面,參考文獻[15],[16]使用影像相減得到移 動的特徵來偵測行進中的車輛,但是類似的偵測移動物體之方法在車輛靜止時將 會失敗。Zhao 與 Nevatia[17]提出一個從高空影像偵測車輛的方法,這個方法使用 車輛類似矩形的外型、前後擋風玻璃以及車輛的陰影當作特徵,實驗顯示具有不. 1-3.
(19) 錯的效果。Tsai 等人[18]利用 Karhunen-Loeve 轉換(Karhunen-Loeve transform, KL transform),將影像的 R、G 以及 B 值轉換到另ㄧ個空間,經過這樣的轉換後,大 部分的車輛顏色可以與背景分離開來,在留下可能是車輛的顏色後,接著比對這 些候選區域是否有類似車子外型的邊緣,若找到類似邊緣則表示找到車輛。Wu 等 人[19]利用小波轉換提取車輛的特徵,再進行主要成分分析(principal component analysis, PCA)留下最重要的幾個特徵,進行分類後定位出車道上的車輛。Sun 等人 [20]則是使用 Gabor 濾波器(Gabor filter)對影像抽取特徵以作為車輛偵測之用。 Song 和 Tai[21]利用光流法(optical flow)比對影像中兩個特定區塊之間的特徵,可 以辨別出車輛轉彎或是直行。Kamijo 與 Sakauchi[22]利用時空馬可夫隨機場 (spatio-temporal Markov random field, S-T MRF)可以同時追蹤十字路口的車與人。 Iwasaki[23]將車道分配給數台攝影機,每台攝影機監看車道的某部分,利用這些車 道區域影像之灰階直方圖分佈的標準差,可以判斷出該車道區域上是否有車輛佔 據,進而計算出車輛停等的長度,如圖 1.3 所示。 像素個數 灰階. (b). 像素個數. (a). (c). 灰階. (d). (e). (f). 圖 1.3 使用車道灰階直方圖判斷車道上是否有車輛的例子。(a) 車道上沒有車輛的 輸入影像;(b) 目標車道區的灰階圖;(c) 目標車道區的灰階圖分佈;(d) 車道上 有車輛的輸入影像;(e) 目標車道區的灰階圖;(f) 目標車道區的灰階圖分佈。. 1-4.
(20) 1.1.2 交通動線效率化 交通與工商業的發展息息相關,因此如何管理交通動線使得它能有更高的效 率一直是相當重要的研究議題。在適應性交通號誌的概念出現之前,已經有許多 定時交通號誌控制方法被提出,而韋伯斯特最佳周期定時號誌控制[40]即為這個領 域最具代表性的研究,它依照路段平均車流規劃出具有最小延滯時間的週期長 度,再依照各路段的相對飽和度分配綠燈時間;這個方法到目前仍普遍地被應用 在交通控制實務上,惟其定時的特性使得它沒辦法應付突然陡增的車流,故常在 車流量突然增高時造成相當程度的路口延滯。 自從模糊理論(fuzzy theory)在 1965 年被提出後,提供了一套語言式分析的數 學模式,可以將模糊不清的狀態或是資料用人類的先驗知識合理地量化、明確化, 因此,常常被應用在參數複雜或難以數學模式化的系統上;交通系統由於隨機性 高,而且突發的事件難以用數學公式描述,故近年來,許多適應性交通號誌控制 都引入模糊理論來設計。 Pappis 與 Mamdani[24]利用模糊邏輯來控制雙邊(東-西、南-北)路段皆為單行 道之獨立路口,並假設車輛到達率為常態分配(normal distribution),其中採用之時 相為簡單二時相,採用的模糊變數有四個,分別為時間、車輛抵達數目、車輛等 候數目以及綠燈延長時間。Favilla 在[25]中比較以模糊理論為基礎的適應性號誌控 制與以統計為基礎的適應性號誌控制,經模擬比較後指出以模糊理論為基礎的適 應性號誌控制有較佳的控制績效。Báez [26]對於交通控制提供了一個以模糊邏輯為 基礎的時相連續器(phase sequencer, PS),可以決定下一個執行相位為何,以及何 時該要執行下一個相位。Chiu 與 Chand[27]應用模糊邏輯控制來處理由六條雙向車 道所形成的路網,每個路口獨立使用只由當地路口收集之交通資訊來調整其號誌 時制參數,除此之外,每個路口也使用相同的模糊規則來調整其參數;其輸入參 數有三個,分別為週期、時比(split)與時差(offset),控制目的為使綠燈路口下的車 流能維持良好之飽和度。Niitymäki 等人在[28]中介紹了兩個模糊控制系統以用於. 1-5.
(21) 交通號誌控制,一為模糊時相選擇器,另一個則為模糊綠燈延長器,兩者的運作 皆是以挑選滿足最大相似性量度(similarity measure)的時相與時間進行。Niitymäki 與 Nevala 在[29]中討論了一般性的模糊號誌控制並呈現了相關結果,在與傳統號 誌控制比較下,指出模糊控制績效較為良好。Chou 與 Teng[30]利用模糊理論的技 術應用於號誌之控制,除了適用於任意路口及任意車道外,還可整合各個路口阻 塞之情形,做出適當之號誌時差控制。Chiou 與 Lan[31]利用基因演算法(genetic algorithm, GA)挑選模糊推論系統的模糊規則以及歸屬函數,以同時達到將模糊系 統的規則簡化並將歸屬函數客觀化的目的;簡化模糊規則的數目可以令系統在進 行模糊推論的時候有較小的運算負擔,因而有較快的處理速度,但是這個方法相 對的也因為被挑選出的模糊規則較少,輸入變數與輸出變數之間因而不能形成完 整的模糊曲面,導致輸入變數為在某種特定情況下可能對應不到該有的模糊規 則,因而使得效能退化。. 1.2 研究動機 為了能夠偵測交通資訊並將其應用於適應性交通號誌控制,影像處理的演算 法必須簡單而有效率,適應性號誌控制系統也必須能對瞬息萬變的交通狀況做適 當的應變。 在對行人的偵測上,行人穿越道的行人在人多的情況下,通常會互相遮蔽, 因此使用參考文獻[6]-[8]的方法將只能偵測到少數分散在人群周圍的行人;使用參 考文獻[9]的方法來偵測人頭比較可以避免上述的問題,但是當拍攝的場景範圍很 大而且有許多的前景物件時,相減的結果會是雜亂的圖樣而無法獲得有效的橢圓 形邊緣,使用參考文獻[10]的方法可以穩健地偵測出影像中的人頭,但是此方法的 計算量非常大,就目前的硬體設備而言並不能達到即時處理的要求;使用參考文 獻[11]-[13]的方法可以把問題簡化,只對人群數目分類,但是這些方法由於特徵值 與人數的關係函數需要由許多資料訓練而得,所以事前的準備相當耗時,而且每. 1-6.
(22) 當換了一個場景,系統就得重新訓練一次,這是相當不方便的。使用參考文獻[14] 的方法只有在行人充份分散於影像中各個區域才有效,若行人集中於影像中的某 區塊,則此方法會失敗。在對交通載具的偵測上,參考文獻[23]的方法須要在一個 路段就設置多台攝影機,除了成本上的不經濟外,其灰階直方圖也容易受到雜訊 的干擾;應用偵測移動物體的方法來偵測交通工具的相關研究相當多,類似的偵 測方法[15]-[16]可以偵測出正在移動的車輛,但是當車輛靜止時或是影像中的物體 過小時,這樣的方法將沒辦法達到預期的效果;參考文獻[17]-[22]使用微觀量測 (microscopic measurement)的概念將影像中的每台車輛都辨識出來,但是這樣的方 法在拍攝場景很廣且前景影像很小的情況下將會受到嚴厲的考驗;姑且不論偵測 的效能為何,這樣的微觀量測在交通號誌控制的應用上是沒有必要的,就如交通 警察指揮交通路口時,不會注意現在路口有幾輛車,只會注意現在路口的車是多 是少;除此之外,這樣的方法也需要非常複雜的演算法來實現,可能使得系統沒 辦法達到即時偵測的需求。在適應性號誌控制的發展上,參考文獻[24]-[31]雖然以 動態的週期長度換取了較高的控制績效,但是鮮少考慮到最佳週期長度與路口相 對飽和度的因素,故有時仍造成路口容量資源的浪費,因此效能仍有進一步提升 的空間。 根據以上討論,發展一個適合於偵測交通資訊的演算法與可以與其配合的適 應性交通號誌控制策略的確是面臨了許多挑戰。為了克服上述問題,本論文設計 了一個有效率的影像處理演算法,可以約略地偵測出行人穿越道上的行人數目, 並且將偵測到的路口車流多寡正規化,以[0, 1]之間的數來表示(以 0 代表最少,以 1 代表最多),而不是計算車輛的數目;為了與影像處理演算法部分配合,本論文 提出的適應性交通號誌管理系統以模糊推論系統為核心,將影像所偵測得到的資 訊模糊化,以減輕影像偵測方面的誤差與不確定性對系統造成的影響,之後以預 先設定好的模糊規則庫來推論出明確的控制輸出來控制獨立路口的交通號誌。此 外,週期長度以及路口相對飽和度也一併被考慮在內。為了了解本論文所提出的 適應性交通號誌管理系統效能為何,本論文也將與與韋伯斯特最佳定時號誌控制 1-7.
(23) [40]與適應性基因模糊邏輯號誌控制[31]在相同的實驗條件下做比較。選擇參考文 獻[40]來做比較的原因是因為它是目前普遍被使用在交通號誌控制實務上的定時 號誌控制法,它的週期是依據預先調查得到的平均車流計算而得,所得出的週期 長度在實際車流量與平均車流量差異不大的情況下,對於使用路口的所有車輛有 最小的路口延滯時間,故與它比較可以了解所提出的方法相對於現行時制的控制 效能差異。選擇參考文獻[31]來做比較的方法則是因為它的變數選擇以及主要架構 與現存多數的適應性交通號誌控制系統之架構類似,而且其模糊規則與模糊函數 皆經過用基因演算法達成樣本學習的最佳化過程,故與它比較可以了解所提出的 方法與現存多數適應性交通號誌控制系統的控制績效何者較佳。. 1.3 論文架構 本篇論文剩餘章節的安排如下:論文使用到的一些相關知識與理論會在第二 章作簡要的描述,以影像為基礎的交通資訊估測系統及以模糊推論為基礎的適應 性交通號誌控制系統會在第三章提出並且作詳細的說明,實驗結果及分析會詳列 在第四章,最後第五章會作一些結論。. 1-8.
(24) 第二章 相關知識及理論 與本篇論文相關的知識以及理論將會在此章節作說明。我們將以影像處理技 術發展用影像序列來估測交通流量資訊的系統,並建立一個以模糊推論系統為控 制核心的交通號誌管理系統,此外,我們也需要一些交通系統的基本知識來衡量 系統的控制效能。 一些影像處理的相關技術會在 2.1 節作個別的敘述,模糊推論系統會在 2.2 作 說明,交通系統概論將在 2.3 作簡單的介紹。. 2.1 影像處理技術 包括成像幾何學(imaging geometry)、紋理分析(texture analysis)、特徵選擇以及 形態學的影像處理相關技術將會在此節說明。如何將相機影像平面上的座標對應 到真實世界的三維座標上,對從影像平面中得到真實世界的三維資訊而言是相當 重要的,為了達到這個目的,必須找出相機的內、外部參數,這些計算可由成像 幾何學完成。紋理分析可以對影像特定區域定量地描述其對比度、一致性、相關 性、熵以及能量等特徵。特徵選擇可以決定所抽取特徵的重要性。形態學運算可 以用來對影像做初步的前處理。 成像幾何學會在 2.1.1 節探討,紋理分析在 2.1.2 節講解,特徵選擇在 2.1.3 節 敘述,形態學在 2.1.4 節說明。. 2-1.
(25) 2.1.1 成像幾何學 最簡單的相機成像原理可用針孔相機模型(pinhole camera model)來說明[32], 它是一個理想的相機模型,如圖 2.1。藉由相似三角形,可以找出三維世界座標系 統(world coordinate system, WCS)與相機影像平面(image plane)座標之間的關係,如 圖 2.2,假設一個三維座標點為(x, y, z),而它在影像平面上的投影座標為(u, v),則 三維及二維座標之間的關係可表示如下: u x = , f z v y = , f z. (2.1). 其中 f 為相機的焦距(focal length)。. (v, y) (u, x). (x, y, z). 影像平面 焦距. z 透鏡中心. (u, v). 圖 2.1 針孔相機模型。. (v, y) 影像平面. 焦距. (y, z). (v, f) z. 透鏡中心 圖 2.2 相似三角形模型。. 2-2.
(26) 相機校正(camera calibration)的主要工作是要找出相機的內、外部參數。內部 參數包含相機的焦距、主要點(principal point)、歪斜係數(skew coefficient)、以及失 真[32],這些參數值在拍攝時是固定的。外部參數包含WCS與相機座標系統(camera coordinate system, CCS)之間的位移及旋轉,這些參數值會隨著相機位置的不同而 改變。三維及二維座標之間的關係可由一個 3 × 4 的透視轉換矩陣(perspective transformation matrix)M表示,令m1、m2、m3為M的三個列向量,令P=[x y z 1]為WCS 中一點的齊次座標(homogeneous coordinate)的向量形式,則它在影像平面上的座標 (u, v)可以表示為: u = (m1 ⋅ P) /(m3 ⋅ P ),. (2.2). v = (m2 ⋅ P) /(m3 ⋅ P).. M是一個由十一個相機參數所決定的矩陣,在此介紹一個簡化的模型[33],只使用 七個相機參數:焦距f、主要點p(u0, v0)、平掃(pan)的角度 α 、俯仰(tilt)的角度 β 、 平擺(yaw)的角度 γ 、以及CO與O之間的距離Hc,如圖 2.3 所示,假設系統使用的是 針孔相機模型,亦即歪斜係數為零以及無失真,令CCS(正交座標軸CX、CY、以及 CZ)的原點CO(即透鏡中心)位於WCS(正交座標軸X、Y、以及Z)的原點O的垂直正上 方,也就是CO在Y軸上,其中X-Z平面我們稱為地平面(ground plane),而 α 為對著Y 軸逆時鐘旋轉的角度, β 為對著X軸順時鐘旋轉的角度, γ 為對著Z軸順時鐘旋轉 的角度,M可以被簡化為: ⎡f M = ⎢⎢ 0 ⎣⎢ 0. 0 f 0. u0 v0 1. ⎡ r11 R = ⎢⎢ r21 ⎢⎣ r31. r12 r22 r32. r13 ⎤ ⎡cα ⋅ cγ + sα ⋅ s β ⋅ sγ r23 ⎥⎥ = ⎢⎢ cα ⋅ sγ − sα ⋅ s β ⋅ cγ r33 ⎥⎦ ⎢⎣ sα ⋅ cβ. T = [t1 t2. 0⎤ ⎡R T ⎤ 0 ⎥⎥ ⎢ , 0 1 ⎥⎦ ⎣ 0 ⎥⎦. t3 ] = [0 H c T. −cβ ⋅ sγ cβ ⋅ cγ sβ. − sα ⋅ cγ + cα ⋅ s β ⋅ sγ ⎤ − sα ⋅ sγ − cα ⋅ s β ⋅ cγ ⎥⎥ , ⎥⎦ cα ⋅ cβ. (2.3). 0]T ,. 其中 cα 、 sα 、 cβ 、 s β 、 cγ 以及 sγ 分別代表 cosα、sinα、cosβ、sinβ、 cos γ 以及 sinγ。. 2-3.
(27) CO. CY. CZ Hc. CX. Z. 3D物件. X O. 地平面 Y. 圖 2.3 WCS 以及 CCS 的相對位置。. 根據參考文獻[33],我們可以得到四個與成像幾何學相關的特性: 特性一:在 WCS 中的任意一組互相平行的直線其投影在影像平面上的影像會是通 過一個共同點的直線群,這個點稱為它們的消失點(vanishing point)。由式 子(2.2)以及(2.3),可以得到消失點在影像平面的座標: ⎛ r11a + r12b + r13c + u0 , ⎜f⋅ ⎝ r31a + r32b + r33c. f⋅. ⎞ r21a + r22b + r23c + v0 ⎟ , r31a + r32b + r33c ⎠. (2.4). 其中[a b c]是這組平行線的方向向量(direction vector)。假設我們以WCS的 三個正交座標軸X、Y、以及Z分別作為三組平行線的方向向量,亦即令方 向向量[a b c]分別為[1 0 0]、[0 1 0]、以及[0 0 1],則三個方向的消失點座 標Vx、Vy、以及Vz由式子(2.4)可以分別得到為: ⎛ r ⎞ r Vx = (uVx , vVx ) = ⎜ f ⋅ 11 + u0 , f ⋅ 21 + v0 ⎟ , r31 ⎝ r31 ⎠ ⎛ r ⎞ r Vy = (uVy , vVy ) = ⎜ f ⋅ 12 + u0 , f ⋅ 22 + v0 ⎟ , r32 ⎝ r32 ⎠ ⎛ r Vz = (uVz , vVz ) = ⎜ f ⋅ 13 + u0 , ⎝ r33. f⋅. (2.5). ⎞ r23 + v0 ⎟ , r33 ⎠. 我們稱這三個消失點為互相正交的消失點。 特性二:以三個互相正交的消失點為端點形成的三角形,其垂心(orthocenter)即為 主要點,如圖 2.4(b)所示。. 2-4.
(28) 特性三:在 WCS 中任意一平面上的任意許多組平行線,其消失點會在影像平面上 形成一條直線,稱為消失線(vanishing line)。如果這些平行線都平行地平 面,則其形成的消失線稱為地平線(horizon line),如圖 2.4(b)所示。 特性四:水平線與地平線的夾角(圖 2.4(b)的 θ )等於平擺的角度 γ 。. Vz. 水平線. θ. 地平線. Vx. (u0, v0). Vy (a). (b). 圖 2.4 利用方塊物件求取相機參數的圖例。 (a) 原始影像;(b) 影像的消失點、 主要點以及地平線。. 以下逐步列出求取七個相機參數的步驟: 步驟一:利用WCS中的三組互相正交的平行線,求出三個互相正交的消失點Vx、 Vy、以及Vz。 步驟二:由上述的特性二算出主要點座標。 步驟三:由上述的特性四算出平擺的角度 γ 。 步驟四:如果 γ 等於零,由式子(2.3)以及(2.5)可以得到: uVx = f ⋅ cot α / cos β + u0 ,. (2.6.1). vVx = − f ⋅ tan β + v0 ,. (2.6.2). uVy = u0 ,. (2.6.3). vVy = f ⋅ cot β + v0 ,. (2.6.4). uVz = − f ⋅ tan α / cos β + u0 ,. (2.6.5). vVz = − f ⋅ tan β + v0 ,. (2.6.6). 由式子(2.6.2)以及(2.6.4),求得 f 為: 2-5. (2.6).
(29) f = −(vVx − v0 )(vVy − v0 ),. (2.7). 由式子(2.6.2)以及(2.7),求得 β 為:. β = tan −1 ((v0 − vV ) / f ), x. (2.8). 由式子(2.6.1)、(2.7)、以及(2.8),求得 α 為:. α = cot −1 ((uV − u0 ) cos β / f ), x. (2.9). 根據交叉比不變性(cross ratio invariance)[34],可以得到. H d ( x′, c) ⋅ d ( x, v) , = 1− Hc d ( x, c) ⋅ d ( x′, v). (2.10). 如圖 2.5,其中v是垂直地平面方向的消失點,H是參考物件在WCS的高 度,d()為兩個座標之間的距離,由式子(2.10)可求得Hc;如果 γ 不等於零, 則將影像繞著影像原點旋轉 γ 角度,使水平線和地平線互相平行,得到的 新影像平擺角即為零,因此可以利用以上步驟求得 f ′ 、 u0′ 、 v0′ 、α ′、 β ′ 、. γ ′ = 0 、以及 H c′ ,則原始影像的參數為 f = f ′ 、 u0 = u0′ cos γ − v0′ sin γ 、 v0 = u0′ sin γ − v0′ cos γ 、 α =α ′ 、 β =β ′ 、 γ = γ 、以及 H c = H c′ 。. c. 地平線. x' 參考物件. 地平面. x. v 圖 2.5 計算相機位置高度的示意圖。. 2.1.2 紋理分析 描述紋理最簡單的方法是利用一張影像或是影像中一個特定區域灰階直方圖 分布的矩(moment)。假設 z 代表灰階的ㄧ個隨機變數,並令 p( zi ), i = 1,2, " , L − 1 是. 2-6.
(30) 直方圖對應於灰階 i 的倉(bin),其中 L 影像的灰階數,則 z 對平均值的 n 階矩是 L −1. μn ( z ) = ∑ ( zi − m )n p( zi ),. (2.11). i =0. 其中 m 是 z 的平均值,可以下式求得: L −1. m = ∑ zi p(zi ),. (2.12). i =0. 二階矩在紋理描述中尤其重要,它是灰階對比度的ㄧ個量測,可以用來建立相對 平滑度的描述子。三階矩是直方圖歪斜程度的量測,四階矩是直方圖相對平坦度 的量測。五階以上的矩並不容易和直方圖的形狀有關係,但它們提供了更進ㄧ步 紋理內容的定量辨別方式。 僅僅運用影像灰階直方圖分布計算而得的紋理量測經常有限制性,因為它們 並沒有包含像素間彼此相對位置的資訊。將這類的資訊納入紋理分析過程的ㄧ個 方法是不僅要考慮灰階值的分布,還要考慮具有相等灰階或是接近相等的灰階之 像素的位置[35]。 假設R是一個位置運算子,A是一個k階方陣,其元素aij是灰階值為zi的在R所規 定的位置上相對於灰階為zj的點發生的次數,1 ≤ i, j ≤ k 。例如,考慮具有下面三個 灰階的ㄧ張影像: z1 = 0, z2 = 1 ,以及 z3 = 2 ,其中影像如圖 2.6 所示:. 圖 2.6 具有三個灰階的影像。. 假設我們把位置運算子 R 定義為「0°且為中心像素旁邊的第一個像素」,則可以得 出如下所示的 3 階方陣 A:. 2-7.
(31) ⎡1 0 4⎤ A = ⎢⎢3 2 2⎥⎥, ⎢⎣1 5 2⎥⎦. 方陣中的元素aij是一個像素灰階為 zi ,且右方的ㄧ個像素灰階為 z j 所發生的次數。 A的維度嚴格地由輸入影像中的灰階數目所決定,所以,通常具有較多灰階數目的 輸入影像會被重新量化為一個具有較少灰階數目的影像,以保證A的大小是容易處 理的。 設n是影像中滿足位置運算子R的總點對數,如果一個矩陣C是將A的每個元素 除以n而形成的,則其元素cij是滿足K的ㄧ對像素之聯合機率(joint probability)估測 值。矩陣C被稱為灰階共生矩陣(gray-level co-occurance matrix)。因為C取決於R, 所以可以透過選擇適當方向與距離的R來檢測特定紋理的出現,R的選擇可以圖 2.7 來表示。. 90° 且與中心距離 D 45° 且與中心距離 D. 135° 且與中心距離 D. 中心像素. 0° 且與中心距離 D. 圖 2.7 位置運算子 R 的選擇方式。. ㄧ般而言,問題是分析一個由 R 決定的 C 矩陣,以計算影像中特定區域的紋 理內容。對這個目的有用的ㄧ些運算子包括下列式子: 1.. 對比度(contrast). ∑∑ i − j i. j. 2-8. 2. cij ,. (2.13).
(32) 2.. 相關性(correlation). ∑∑ i. 3.. (i − μi )( j − μ j )cij σ iσ j. j. 2. ij. i. (2.15). ,. j. ㄧ致性(homogeneity). cij. ∑∑ 1 + i − j ,. (2.16). − ∑∑ cij log cij .. (2.17). i. 5.. (2.14). 能量(energy). ∑∑ c 4.. ,. j. 熵(entropy) i. j. 2.1.3 特徵選擇 本節所討論的內容是參考參考文獻[36]的部分內容。特徵們的重要性往往是不 一樣的,特徵選擇是特徵抽取過程中的重要步驟,透過這個步驟,所抽取的特徵 們之相對重要性將可以被決定。從圖形識別的觀點來看,一個類別其特徵抽取結 果的好壞,可以直接從類別裡特徵向量們的密集度來決定,若同ㄧ類別的特徵向 量越密集,則特徵抽取的結果就越佳。假設在特徵向量為 n 維的特徵空間裡,ㄧ 個可以代表上述概念的量度就是類別 C 的集合內部距離(intraset distance),經推導 後可以被表示為: n. D 2 (C ) = 2∑ σ k , 2. (2.18). k =1. 其中 σ k 代表特徵向量們第 k 個分量的標準差。若一個類別的集合內部距離越小, 則代表特徵向量的分布越密集,分類結果也就越好。 再次考慮一個在類別 C 內且具有 n 個分量的特徵向量 x = [ x1 , x2 , " , xn ]T ,其每 個分量 xi ,1 ≤ i ≤ n ,都代表將此向量分門別類的重要特徵,很直覺地,較不重要的. 2-9.
(33) 特徵分量我們可以給予較小的權重,這樣的概念可以透過對原來的特徵向量進行 線性映射,轉換到另外ㄧ個特徵向量空間而達成。考慮一個如下的權重矩陣(weight. matrix): w12 " w1n ⎤ w22 " w2 n ⎥⎥ , # % # ⎥ ⎥ wn 2 " wnn ⎦. ⎡ w11 ⎢w W = ⎢ 21 ⎢ # ⎢ ⎣ wn1. (2.19). 使用這個權重矩陣可以將原有的特徵向量 x 映射成新的特徵向量 x′ = Wx 。若我們 將式子(2.19)更進ㄧ步地簡化成對角矩陣,如下所示: 0 " 0 ⎤ w22 " 0 ⎥⎥ , # % # ⎥ ⎥ 0 " wnn ⎦. ⎡ w11 ⎢0 W=⎢ ⎢ # ⎢ ⎣0. (2.20). 則新映射而成的類別 C ′ 其集合內部距離可以由下式求得: n. D 2 (C ′) = 2∑ (wiiσ k ) , 2. (2.21). k =1. 其中 σ k 代表原來的特徵向量們第 k 個分量的標準差。為了要使式子(2.21)的右方達 到最小化,我們還需要對權重係數 wii ,1 ≤ i ≤ n ,加上一個限制條件。 假設對於權重係數給予下式的限制: n. ∑w i =1. ii. = 1,. (2.22). 則將 D 2 (C ′) 最小化等同於將式子(2.23)最小化 n ⎛ n ⎞ 2 A = 2∑ (wiiσ ii ) − α ⎜ ∑ wii − 1⎟, i =1 ⎝ i =1 ⎠. (2.23). 因為式子(2.22)成立,所以將式子(2.23)對權重係數偏微分得到:. ∂A 2 = 4wiiσ i − α = 0, ∂wii. 1 ≤ i ≤ n,. (2.24). 因此可以得到: wii =. α , 2 4σ i. 2-10. 1 ≤ i ≤ n,. (2.25).
(34) 加上式子(2.22)的限制條件,可以解得 α :. 4. α=. ,. n. ∑σ i =1. (2.26). −2 i. 再將式子(2.26)代入式子(2.25),則所求的權重係數可以下式表示:. wii =. 1. σi. 2. .. n. ∑σ. (2.27). −2 i. i. 假設我們對權重係數給予的限制條件不是式子(2.22)而是下式: n. ∏w. ii. = 1,. (2.28). i =1. 則依照式子(2.23)到(2.27)的步驟,我們可以得到相對的權重係數: 1n. 1⎛ n ⎞ wii = ⎜⎜ ∏ σ i ⎟⎟ , σ i ⎝ i =0 ⎠. (2.29). 從上式可以看出第 i 個權重係數的大小是與特徵向量們第 i 個分量的標準差成反比 的,換句話說,標準差越大的特徵分量,即代表越不重要的特徵。. 2.1.4 形態學 本節所討論的內容是參考參考文獻[37]的內容。形態學有許多各式各樣的運算 可以用來處理物體的外形及結構。這些運算是使用在二值化影像。侵蝕(erosion) 及膨脹(dilation)是兩種最基本的運算,斷開(opening)及閉合(closing)運算是侵蝕及 膨脹這兩種運算的延伸,這四種運算會在此章節作說明。 首先介紹一些基本定義,設A和B是Z2中的兩個集合,它們的分量分別為a=(a1,a2) 以及b=(b1, b2),則A平移x=(x1, x2),用(A)x表示之,定義為. ( A) x = {c | c = a + x, a ∈ A},. (2.30). B 的反射,用 Bˆ 表示之,定義為 Bˆ = {x | x = −b, b ∈ B},. 2-11. (2.31).
(35) A 的補集是 A = {x | x ∉ A},. (2.32). A 和 B 的差集表示為 A-B,定義為 A − B = {x | x ∈ A, x ∉ B} = A ∩ B.. (2.33). 假設一影像的集合為 A ,且有一結構元素的集合為 B,則 A 被 B 侵蝕記為. A B,定義為 A. B={x | ( B) x ⊆ A},. (2.34). 圖 2.8 是一個侵蝕的例子,圖 2.8(a)中灰色部分是影像的集合 A,圖 2.8(b)中灰色部 分是結構元素的集合 B,圖 2.8(c)中灰色部份是侵蝕後的集合。. (a) (b) (c) 圖 2.8 侵蝕運算。 (a) 侵蝕前影像;(b) 結構元素;(c) 侵蝕後影像。. 假設一影像的集合為 A,且有一結構元素的集合為 B,則 A 被 B 膨脹記為 A ⊕ B ,定義為. A ⊕ B = {x | ( Bˆ ) x ∩ A ≠ Φ},. (2.35). 圖 2.9 是一個膨脹的例子,圖 2.9(a)中灰色部分是影像的集合 A,圖 2.9(b)中灰色部 分是結構元素的集合 B,圖 2.9(c)中灰色部份是膨脹後的集合。. (a) (b) (c) 圖 2.9 膨脹運算。 (a) 膨脹前影像;(b) 結構元素;(c) 膨脹後影像。 2-12.
(36) 影像的斷開運算是由侵蝕運算及膨脹運算所組成。斷開運算可以定義成:. AD B = (A. B ) ⊕ B,. (2.36). 其中 A 是影像的集合,B 是結構元素,它代表的意思為影像先經過侵蝕後再膨脹。 斷開運算可以用來消除物體突出的地方及雜訊。 閉合運算剛好與斷開運算相反,它可以定義成: A • B = ( A ⊕ B). B,. (2.37). 其中 A 是影像的集合,B 是結構元素,它代表的意思為影像先經過膨脹後再侵蝕。 閉合運算可以用來消除影像中的空洞及填滿空隙。 由於型態學運算提供了類似於空間域濾波(spatial filtering)的概念,所以也可以 稱做形態學濾波(morphological filtering)。在此總結上述型態學運算與其對應的效 果:膨脹運算可以延展影像的邊界;侵蝕運算可以將邊界收縮;斷開運算可以平 滑輪廓,將狹長帶截斷,並消除孤立的雜訊點;閉合運算可以平滑輪廓,將狹窄 的斷開處接合,以及填滿影像中的小洞。. 2.2 模糊推論系統 模糊推論系統已廣泛地應用在於許多領域,如自動控制、圖形識別、以及決 策分析,使用模糊系統有兩個主要的優點,第一個優點是不需要精確的數學模型, 第二個優點是可以將人類專家的知識結合至系統的判斷上。一般來說,模糊系統 的基本架構如圖 2.14 所示,根據參考文獻[38]的論述,可以分為四個主要的功能方 塊,包括:1) 模糊化機構(fuzzifier);2) 模糊規則庫(fuzzy rule base);3) 模糊推論 引擎(fuzzy inference engine);以及 4) 去模糊化機構(defuzzifier)。模糊化機構的功 能為將明確的外界輸入資料轉換成適當的語意式模糊資訊;模糊規則庫存放解決 相關問題所需的知識及規則;模糊推論引擎藉由模糊推論的方式來模擬人類的思 考決策模式以解決面對的問題;去模糊化機構的功能是將模糊推論引擎所推出的. 2-13.
(37) 模糊資訊轉回外界的明確數值。以上四個功能方塊的詳細解說如後。. μ ( x). 輸入x. μ ( y) 模糊推論引擎. 模糊化機構. 輸出 y 去模糊化機構. 模糊規則庫 圖 2.10 模糊系統的基本架構。. 2.2.1 模糊化機構 模糊化機構可以被視為一種映射,由明確的輸入空間映射至特定模糊集合空 間 [38] 。我們可以定義在論域 (universe of discourse) U 中的一個模糊集合 (fuzzy. set) A 為: A = {( x, μ A ( x)) | x ∈ U } ,. (2.38). 其中 μ A ( x) 是模糊集合 A 的歸屬函數(membership function), μ A ( x) 代表論域 U 中元 素 x 對模糊集合 A 的歸屬程度。通常歸屬函數的值是介於 0 與 1 之間,三個常見的 歸屬函數 μ A ( x) 、 μ B ( x) 、以及 μC ( x) 如圖 2.11,並定義如下:. 1. Z 型歸屬函數: ⎧1, if x ≤ x0 , ⎪ x − xa μ A ( x) = ⎨ x0 − xa , if x0 ≤ x ≤ xa , ⎪ if x ≥ xa , ⎩0,. (2.39). 其中輸入為 x0 時的歸屬值(membership value)為 μ A ( x0 ) = 1 ,如圖 2.11(a) 所示。. 2. 三角形歸屬函數: ⎧0, if x ≥ xa or x ≤ xb , ⎪⎪ x − x b μ B ( x) = ⎨ x0 − xb , if xb ≤ x ≤ x0 , ⎪ x − xa ⎪⎩ x0 − xa , if x0 ≤ x ≤ xa , 2-14. (2.40).
(38) 其中 μ B ( x0 ) = 1 ,如圖 2.11(b)所示。. 3. S 型歸屬函數: ⎧0, if x ≤ xb , ⎪ x − xb μC ( x) = ⎨ x0 − xb , if xb ≤ x ≤ x0 , ⎪ if x ≥ x0 , ⎩1,. (2.41). 其中 μC ( x0 ) = 1 ,如圖 2.11(c)所示。 μA. μB 1. 1. 0. μC. x0. xa. (a). x. 0 xb. 1. x0. xa. x. 0. xb. (b). x0. x. (c). 圖 2.11 歸屬函數。 (a) Z 型;(b) 三角形;(c) S 型。. 2.2.2 模糊規則庫 模糊規則庫是由一組以 IF-THEN 形式的模糊規則所組成,這組模糊規則是用 以描述系統的輸入與輸出的關係,參考文獻[38]中對此有詳盡的說明。為了說明模 糊規則及模糊規則庫的運作,首先我們需要定義語意式變數(linguistic variable):. ( x, U , {T 1 , T 2 , ..., T k }, {μ 1 , μ 2 , ..., μ k }) ,其中 x 是變數的名稱;U 是論域; T i 是 語意式變數的語意值(linguistic value),令 T ( x) = {T 1 , T 2 , ..., T k } ,則 T ( x) 稱為 x 的 措詞集(term set);μ i 是相對於 T i 的歸屬函數。如果 x 是溫度,論域 U 定義於[0, 70], 則措詞集可以是 T ( x) = { 低, 適中, 高 } 。 最常見的模糊規則型式有三種:語意式模糊規則、函數式模糊規則、以及. Tsukamoto 模糊規則,以下列出本論文使用的語意式模糊規則: R i : IF x is Ai , ..., AND y is Bi , THEN z is Ci , i = 1, 2, ..., n,. 2-15. (2.42).
(39) 其中 x, ..., y 以及 z 是語意式變數, Ai , ..., Bi 以及 Ci 是相對於 x, ..., y 以及 z 的語意 值, x, ..., y 以及 z 的論域分別是 U , ..., V 以及 W 。. 2.2.3 模糊推論引擎 模糊推論引擎是模糊系統的核心,它可以藉由近似推論或模糊推論的進行得 到一推論出來的模糊資訊,用來模擬人類的思考決策[38]。以下藉由一個簡單的例 子說明模糊推論的過程: 輸入: x is A and y is B 模糊規則 R1 : IF x is A1 AND y is B1 , THEN z is C1 模糊規則 R 2:IF x is A2 , AND y is B2 , THEN z is C2. (2.43). 輸出: z is C 假設兩輸入的模糊集合皆為模糊單點(fuzzy singleton),兩個模糊規則的啟動強 度(firing strength)可以分別表示為:. α1 = μ A ( x0 ) ∧ μ B ( y0 ) and 1. 1. α 2 = μ A ( x0 ) ∧ μ B ( y0 ), 2. (2.44). 2. 根據 Mamdani 所提出的最小值推論法(minimum implication rule),最後推論出模糊 集合 C ,其歸屬函數為:. μc ( z ) = [α1 ∧ μC ( z )] ∨ [α 2 ∧ μC ( z )], 1. 2. (2.45). 以上的 ∧ 及 ∨ 在此分別代表取最小值運算及取最大值運算。以上模糊推論過程如 圖 2.12 所示。. 2.2.4 去模糊化機構 去模糊化機構是將經過模糊推論之後產生的結論轉換為一明確數值的過程. 2-16.
(40) [38]。採用不同的模糊規則,推論出來的結果型式會不同,語意式模糊規則經由模 糊推論引擎推論出來的結果是一模糊集合。常見的去模糊化的方法是中心面積法. (center of area defuzzifier, COA) 以及最大平均法 (mean of maximum defuzzifier, MOM)。本論文採用中心面積法,當論域為離散時,其明確輸出值由以下式子得出:. ∑ = ∑ N. zCOA. μ ( zi ) ⋅zi. i =1 C N. μ ( zi ) i =1 C. (2.46). ,. 其中 N 代表輸出的量化數(quantization level), zi 代表第 i 個量化值,以及 μC ( zi ) 代 表 zi 屬於模糊集合 C 的歸屬值。 模糊規則R1. μA. 1. μB. 1. A1. 模糊規則R2. B. μB. 2. A2. X. μC. 1. 取最小值. C1. Y. X. μA. x0. B1. B2. 2. B. y0. Z. 取最小值. μC. 2. Y. 取最大值. C2. Z. μC. Z. 圖 2.12 一個模糊推論過程的例子。. 2-17.
(41) 2.3 交通系統概論 交通系統是ㄧ個龐大且複雜的動態系統,所以以適當的數學模式來描述交通 系統是非常重要的。ㄧ些交通名詞及其定義將在 2.3.1 節介紹,並說明號誌化交叉 路口之路口總延滯(total delay)的計算方式[39];此外,在適應性交通燈號控制出現 之前,如何將定時號誌控制最佳化也是ㄧ個相當重要的研究題目,韋伯斯特最佳 周期定時號誌控制(Webster optimal cycle fixed timing)[40]是這個領域最經典的方 法,除了目前普遍地被使用在交通控制實務上外,這個方法也常被當成衡量交通 號誌控制績效的依據。韋伯斯特最佳周期定時號誌控制將在 2.3.2 節說明。. 2.3.1 交通名詞與知識 本節所介紹的內容為參考參考文獻[39]之部分內容。一般而言,號誌設計是由 幾個基本要素所組成。紅燈時間(red time)表示禁止車流進入交叉路口之時間,以 R 表示;綠燈時間(green time)為允許車輛進入交叉路口之時間,以 G 表示;黃燈時 間(amber time)為仍允許車流進入之時間,但是必須以在黃燈結束前車輛完全離開 交叉路口為原則,一般約設為 3~5 秒,以 A 表示;全紅時間(all red)即各方向在某 一短暫時間內皆出現紅燈之情形以期達到清除交叉路口之目的,以 AR 示之。面對 同一管制方向,同一顏色燈號循環一週所需之時間,稱為週期(cycle);將週期分為 幾個部份,每一部份指示某方向交通之行進或停止,稱為時相(phase)。 將每日劃分為若干時段,每一時段根據預先設計好的控制策略,以固定週期 有規則地重複出現各種時相來控制交通的行進或停止,稱為定時式交通號誌控制. (fixed timing traffic signal control);反之,適應性交通號誌控制(adaptive traffic signal control)則為能因應交通狀況之迅速變化,依需求調整時相長度或是時相種類的智 慧型號誌控制機制。 假設一個車道的車輛平均到達率(average arrival rate)為 q,車道的平均紓解率. (average departure rate)與飽和流率(saturation flow rate)分別為μ與 s,則它們之間的. 2-18.
(42) 關係可以圖 2.13 表示。. μ. s. q 圖 2.13 平均到達率 q、平均紓解率μ與飽和流率 s 的關係。. 在車流紓解時,當車道的紓解率達到飽和流率的某個臨界程度以上,我們便 可以說車道是可以有效率地紓解車流,一般來說,這個臨界值大約在 0.5 左右,這 段時間被稱為有效綠燈時間(effective green time),以g表示。在綠燈時間開始時, 由於車輛從靜止時啟動速度較慢,所以車道的紓解率並不能馬上達到飽合流率的 某個特定臨界值,這段車道沒有辦法有效紓解車流的時間,被稱為開始損失時間. (starting lost time),通常以ls表示;在黃燈時間開始後,由於只有已經越過停止線 的車輛被紓解,所以車道亦沒有有效地紓解車流,這段時間被稱為結束損失時間 (ending lost time),以le表示;將ls與le合併起來,則我們可以得到損失時間l:. l = ls + le ,. (2.47). 有效綠燈時間 g 可以由下式計算而得:. g = G + A − l,. (2.48). 圖 2.14 可以表示上述名詞之間的關係。另外,從圖 2.14 中也可以看出,圖中的綠 燈時間並沒有充分地被利用,由於座標的橫軸代表時間,縱軸代表每單位時間紓 解的車流,我們可以注意到陰影區代表實際紓解的車流,所以,陰影區和虛線所 圍成的面積差就代表這段綠燈時間所能夠紓解的額外車流。. 2-19.
(43) 每單位時間紓解率. s. g. ls R. le A. G. 時間. R. 圖 2.14 損失時間l (ls + le)、有效綠燈時間g以及實際綠燈時間G之關係。. 圖 2.15 表示一個號誌化交通路口的車輛排隊模式示意圖(queuing diagram),它 可以被用來計算路口總延滯 TD 以衡量號誌控制的績效。從圖中下式可以輕易地被 看出:. qTQ = μ (TQ − R),. (2.49). 其中 TQ 為車道上有車輛在排隊的時間,經過簡單的化簡,TQ 可以由下式表示:. TQ =. μR , μ −q. (2.50). NQ 代表的是車道上有車輛在排隊的時間內所紓解的車流,可以用下式表示:. NQ = q ⋅ TQ,. (2.51). 路口總延滯 TD 可以由下式得出:. TD =. NQ ⋅ R , 2. (2.52). 其單位為車輛數與時間的乘積,若用圖形表示即為圖 2.15 中的陰影部份,路口總 延滯要是越大,則表示陰影區域越大,車輛紓解曲線越不能逼近車輛到達曲線,. 2-20.
(44) 號誌控制效能就越差;反之,路口總延滯要是越小,則表示陰影區域越小,車輛 紓解曲線越能逼近車輛到達曲線,號誌控制效能就越佳。 累積車輛 TQ. 車輛到達曲線 NQ 車輛紓解曲線. TD R. G. 時間. 圖 2.15 號誌化交通路口的車輛排隊模式示意圖。. 圖 2.15 是假設車輛的到達是均勻的,而且並沒有考慮到損失時間的情況,在 這樣的假設下,路口總延滯可以透過式子(2.52)計算而得;但是實際上車輛到達的 情況並不會是均勻的,而是符合某種特定機率分布;加上考慮開始損失時間後, 車輛排隊模式的圖形會如圖 2.16 所示,車輛到達曲線並不是ㄧ條固定斜率的直 線,而是隨著車輛到達率變動的曲線,除此之外,車輛紓解曲線在綠燈時間剛開 始時會是非線性的弧形,切線斜率在損失時間內漸增而最後達到飽合流率。式子. (2.52)並沒有辦法處理這樣的情況,但是我們可以回想,路口總延滯的定義其實就 是車輛到達曲線與車輛紓解曲線間的差,所以若我們把車輛到達曲線當成與時間 有關的函數Q(t),把車輛紓解曲線當成與時間有關的函數R(t),計算開始的時間與 結束的時間分別為ts與te,則路口總延滯TD可以由下式計算得到:. TD = ∫. t =te. t =t s. (Q(t ) − R(t ) )dt ,. (2.53). 或是當時間間隔為離散時,可由其離散版本求得: te. TD = ∑ (Q(t ) − R(t ) ), t =t s. 2-21. (2.54).
(45) 這樣一來,路口總延滯的計算就不會受到車輛隨機到達以及忽略損失時間所造成 的影響。. 累積車輛 車輛到達曲線. TD. 車輛紓解曲線. R. G. 時間. 圖 2.16 考慮車輛隨機到達及損失時間的車輛排隊示意圖。. 2.3.2 韋伯斯特最佳週期定時號誌控制 韋伯斯特將交叉路口總延滯計算公式對週期微分,得到具有最小延滯的週期. Co[40]。Co可以下列的公式計算而得: Co =. 1.5(nl + ∑ AR ) + 5. 1 − ( y1 + y2 + " + y n ). =. 1.5L + 5 , 1 − ∑ yi. (2.55). 其中n為時相數目,l為每一時相之損失時間,AR為全紅時間,L為各時相總損失時 間,yi為時相i時之交通流量與飽和流量比值。在算出最小延滯週期後,接著可以計 算總有效綠燈時間gE: g E = Co − L − ∑ Ai ,. (2.56). 其中Ai為每時相之黃燈時間。最後,依照車道的飽和程度等比例分配有效綠燈時間. gEi每給個時相: g Ei =. yi. ∑y. gE ,. 1 ≤ i ≤ n.. i. 最後可以依照式子(2.48)計算出每個時相的綠燈時間Gi。. 2-22. (2.57).
(46) 第三章 交通資訊估測系統與模糊適應性交 通號誌管理系統 交通資訊偵測以及適應性交通號誌管理都是相當受到重視的議題,由第一章 的探討可以知道目前存在許多的相關文獻,但是大部分的方法都是對影像中的場 景進行微觀量測,亦即將影像中的每個行人,或是每部車輛都加以識別接著進行 追蹤的工作,這樣的方法在管理交通動線的應用上其實是沒有必要的,原因主要 有三個:1) 在管理交通動線時,我們並不用實際去計算路口到底有多少車輛要通 過,或是有多少車輛在等待著要通過,僅僅只要有多或少這種語意式的概念,就 可以分辨出路口的用路需求量,進而可以達成交通動線管理的目的;2) 在管理交 通動線時,我們並不用去追蹤行人或是車輛,在追蹤的過程中我們需要預測行進 路徑,而預測行進路徑常常是為了避免用路人之間的碰撞而發生意外,但是目前 的預測演算法都只能用目前及以前所蒐集的統計資料對下一個狀態(state)做預 測,若以攝影機為感測器的話,則是對 0.1 秒(10 fps)或是 0.0333(30 fps)秒後作預 測,在這樣短的時間裡,即使預測系統預測到碰撞的發生,在通知用路人後,用 路人也很難在極短的時間裡作出適當的反應,因此並不能達到先知先覺的功用; 3) 微觀量測需要非常複雜的演算法來實現,但是演算法越是複雜,則計算上的效 率便越差;除此之外,路口的行人姿態以及車輛外型多變而不固定,在這樣的情 況下,微觀量測的方法更是遭遇到重大的考驗。有鑑於上述種種原因,本論文設 計出一個交通流量估測系統,可以約略估測行人數目、判別路口車流多寡,並提 3-1.
數據

+7





Outline
相關文件
1932 年提出李克特量表( Likert Scale ),是一種 心理測量量表,通常用於問卷設計,為目前最受調查 研究者廣泛使用的測量方法.
張杰、劉小明、賀育龍與陳永勝 (2007) 以 1970 年至 1992 年中國交通事故之十萬 人口死亡率數據,利用 ARIMA 模型預測 1993 年至 1997 年交通事故之死亡率的。.
以上技能的 技能的 技能的發展 技能的 發展 發展和應用 發展 和應用 和應用皆可以 和應用 皆可以 皆可以 皆可以獨立 獨立 獨立 獨立或綜合 或綜合
蔣松原,1998,應用 應用 應用 應用模糊理論 模糊理論 模糊理論
譚志忠 (1999)利用 DEA 模式研究投資組合效率指數-應用
Analyses of traffic phase transition could give an insight into traffic flow phenomena and designing traffic control strategies.. Keywords: Cellular Automata, NaSch
Generally, the declared traffic parameters are peak bit rate ( PBR), mean bit rate (MBR), and peak bit rate duration (PBRD), but the fuzzy logic based CAC we proposed only need
It allows a much wider range of algorithms to be applied to the input data and can avoid problems such as the build-up of noise and signal distortion during processing.. Since
